
An Energy-Efficient Routing Algorithm in Three-Dimensional Underwater Sensor Networks Based on Compressed Sensing

Abstract
:1. Introduction
2. Background on Compressed Sensing
3. System Models
4. Packet Format and Energy Consumption Model
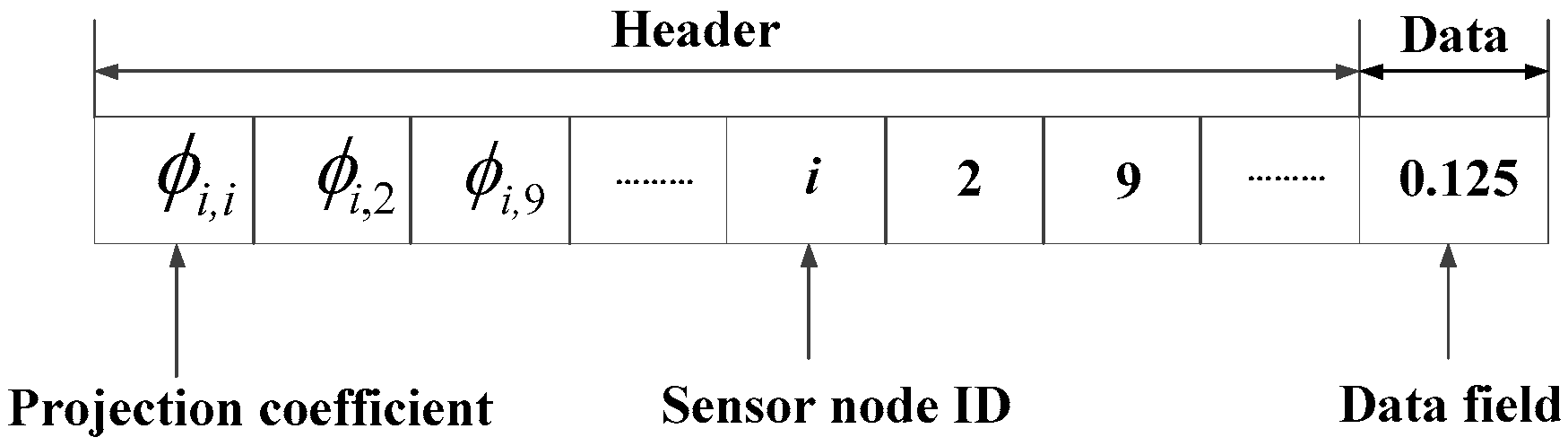
4.1. Packet Format
4.2. Energy Consumption Model
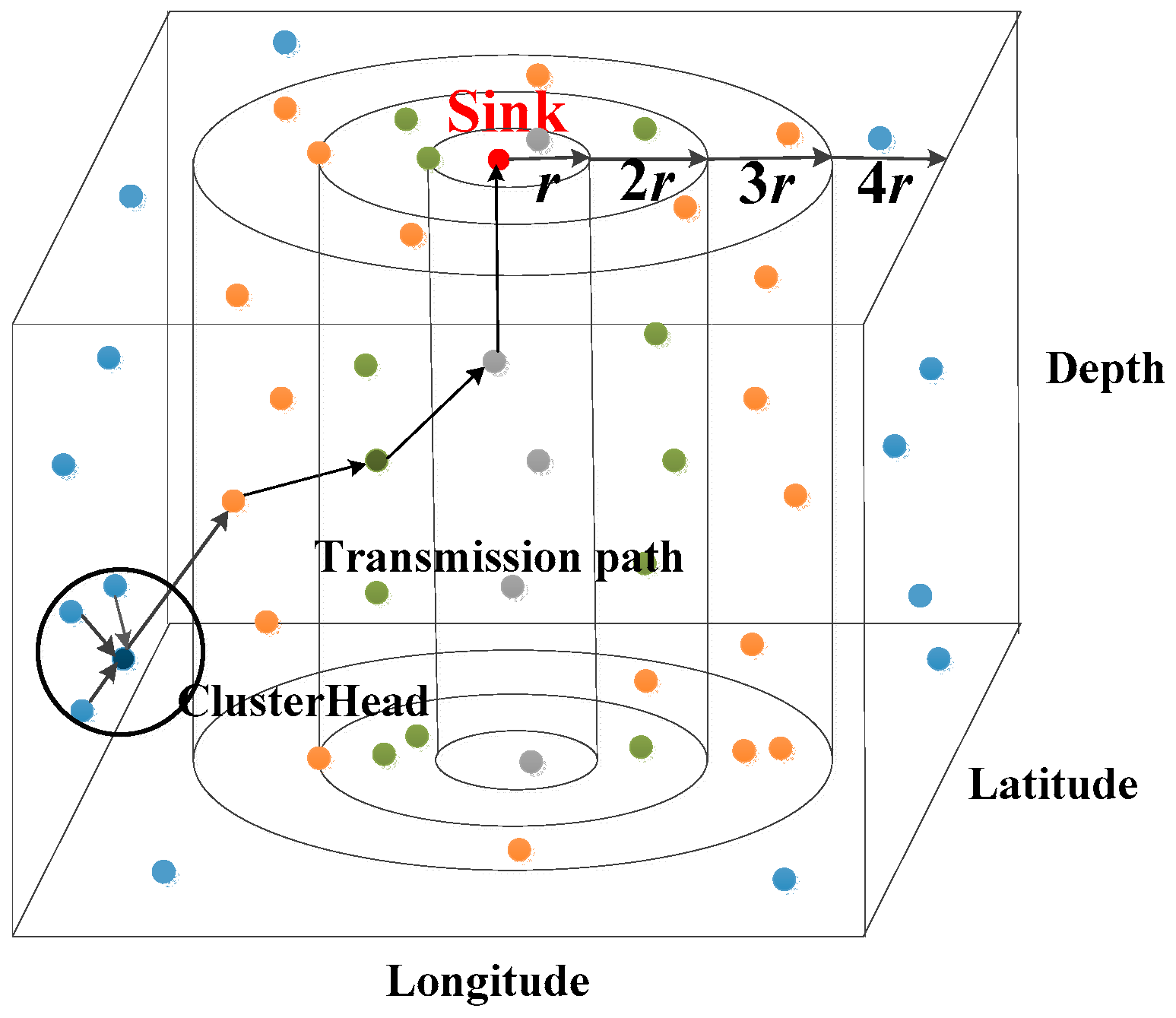
5. CS-CULM
5.1. Clustering Algorithm
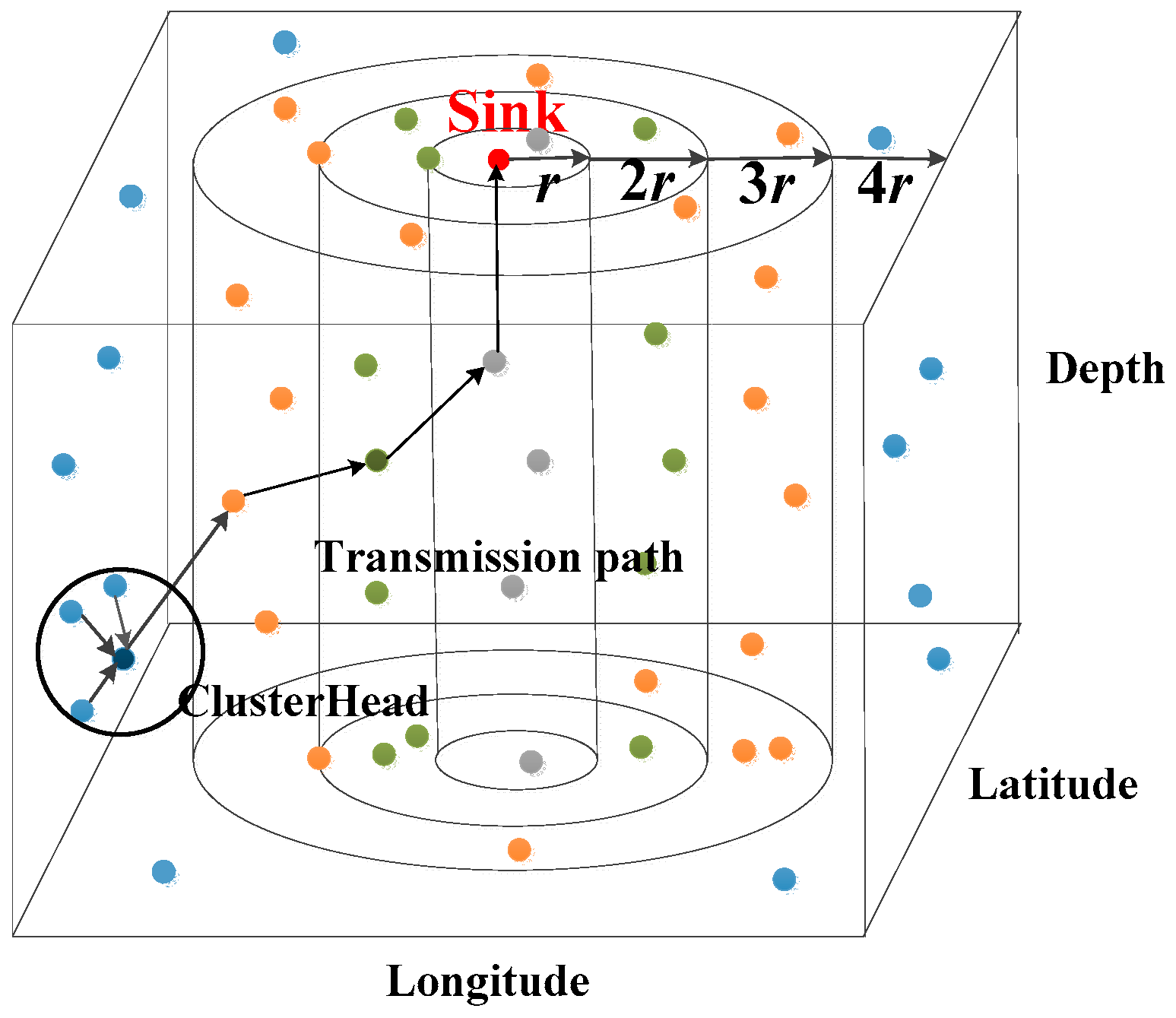
5.2. Uneven-Layered, Multi-Hop Routing
- Step 1:
- If the degree of the current cluster head is 1, forward its packet to sink directly;
- Step 2:
- Otherwise, find lower depth nodes in the next degree within broadcast radius ;
- Step 3:
- If the number of nodes in Step 2 , select the node with maximum as the next-hop node;
- Step 4:
- The next-hop node merges its received packet with itself if it meets the fused conditions in Section 4.1. Otherwise, forward the received packet simply;
- Step 5:
- If the number of nodes in Step 2 , the node will look for lower depth and lower D nodes in the same degree and repeat Step 3.
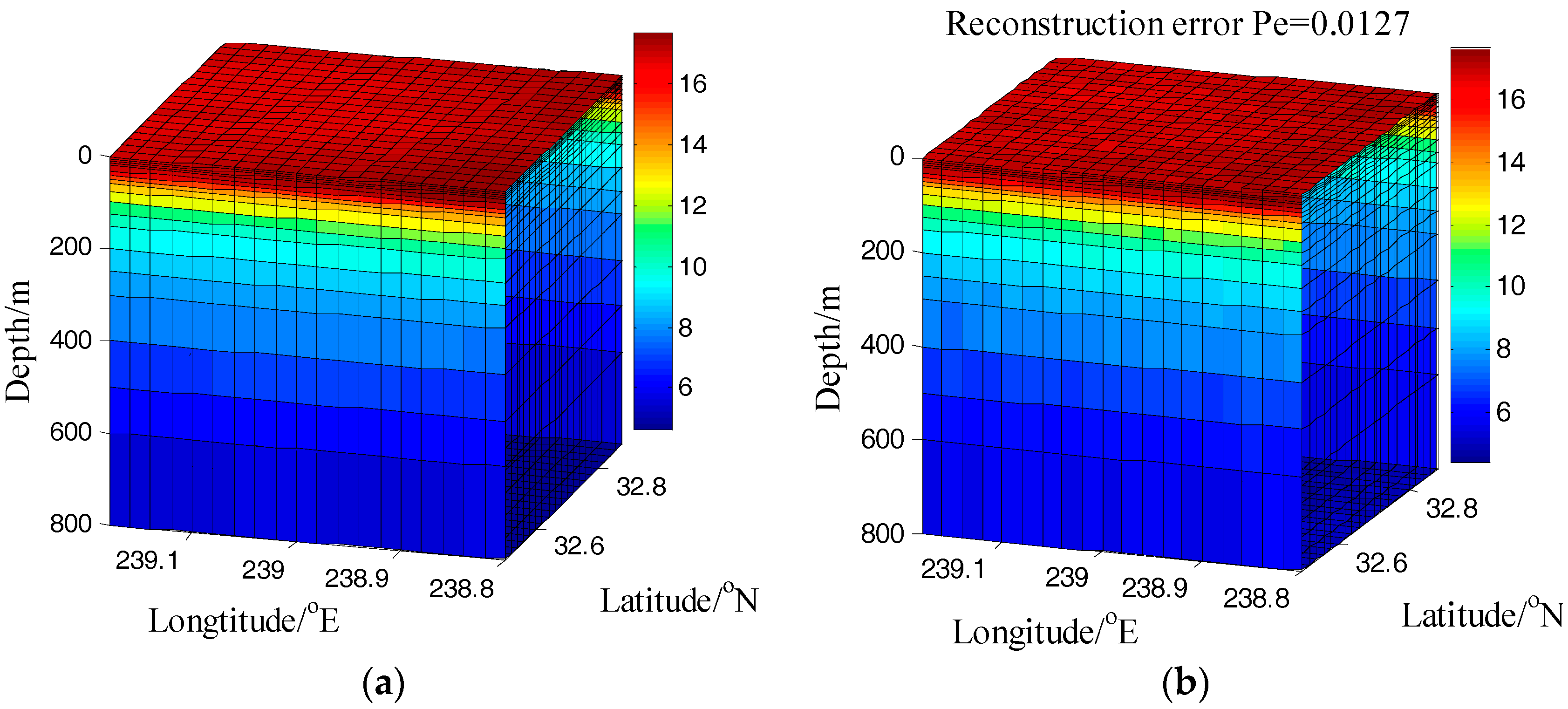
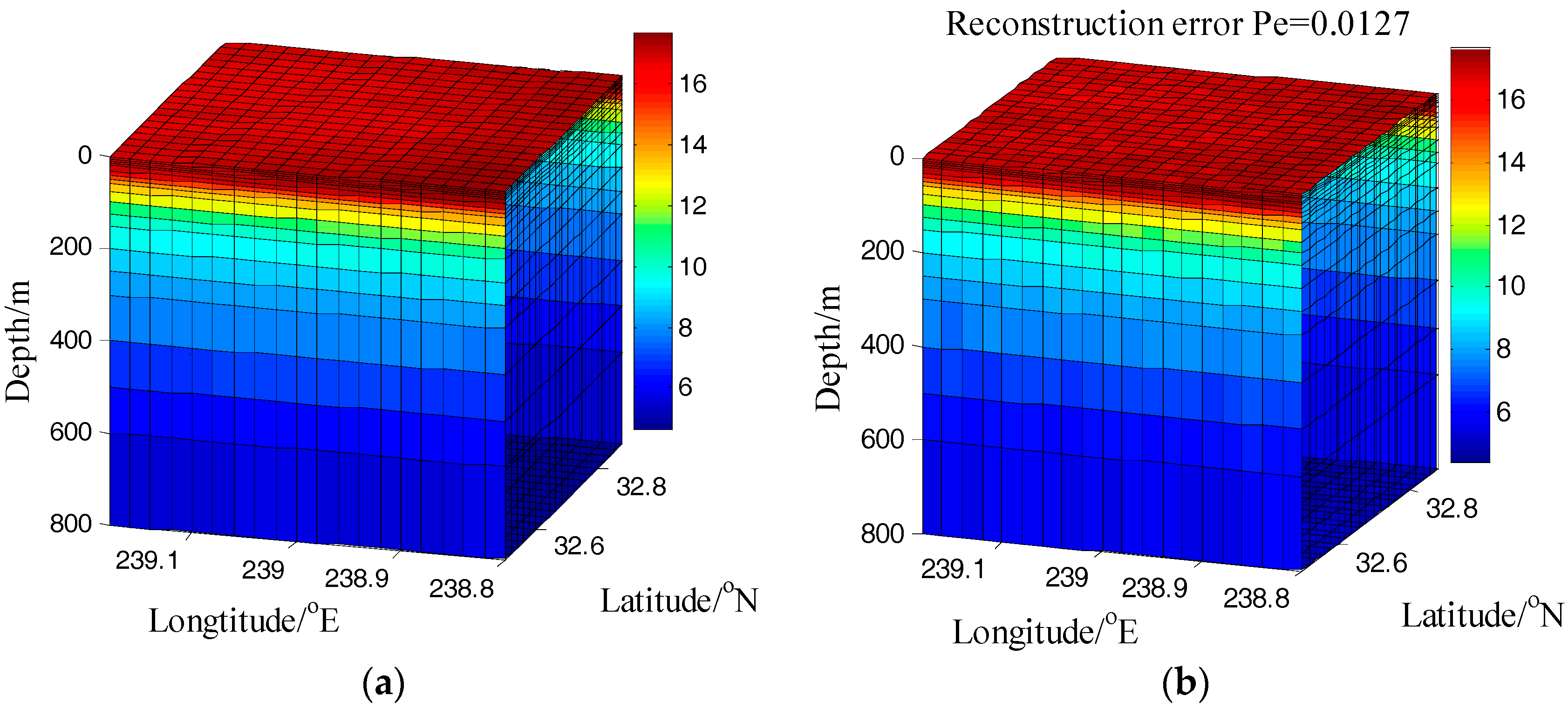
5.3. Data Reconstruction
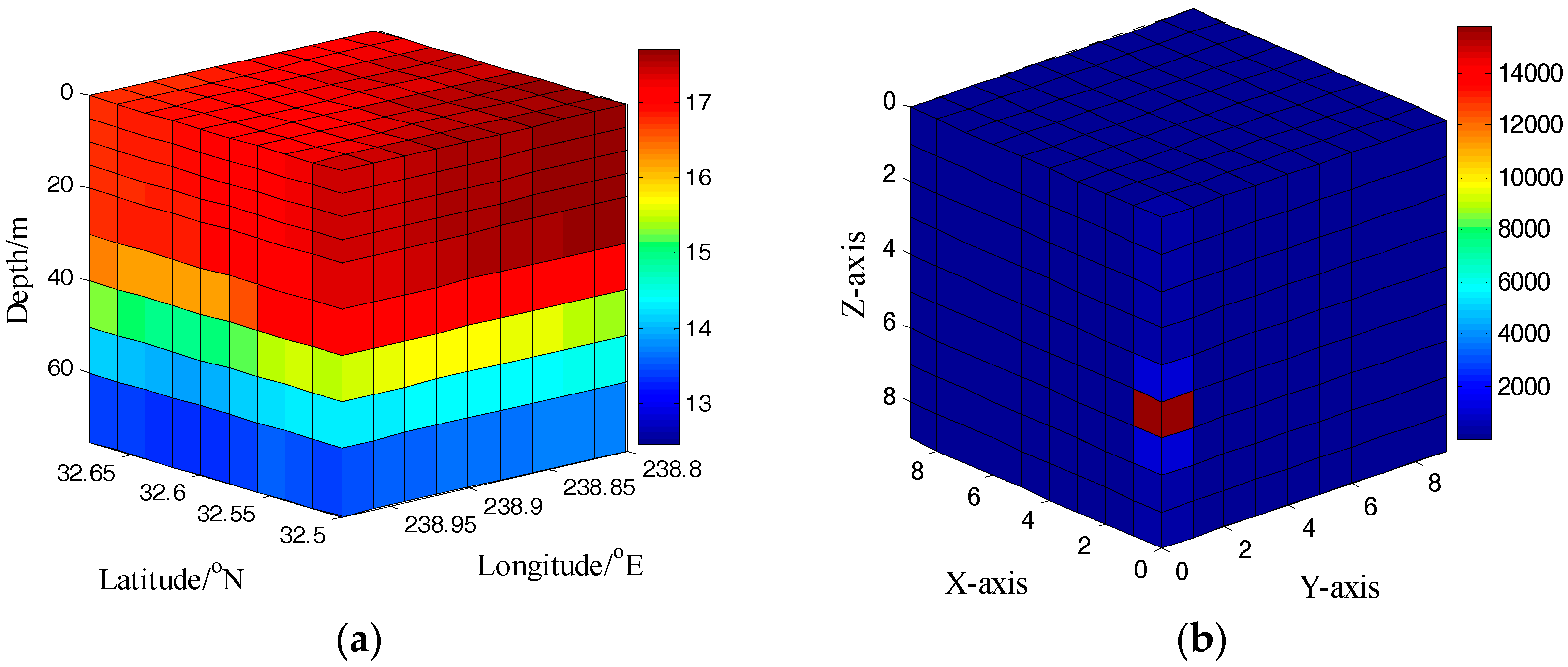
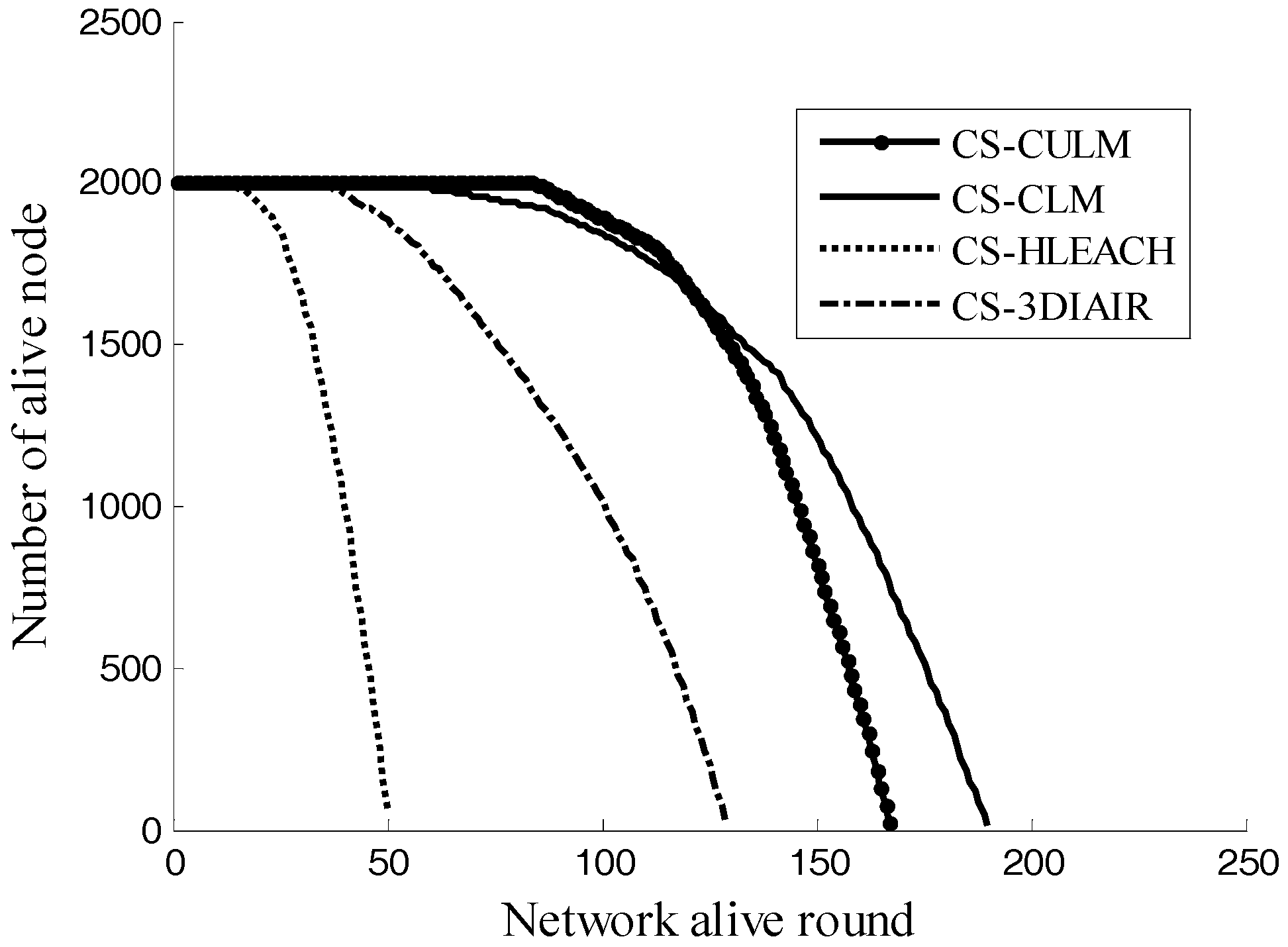
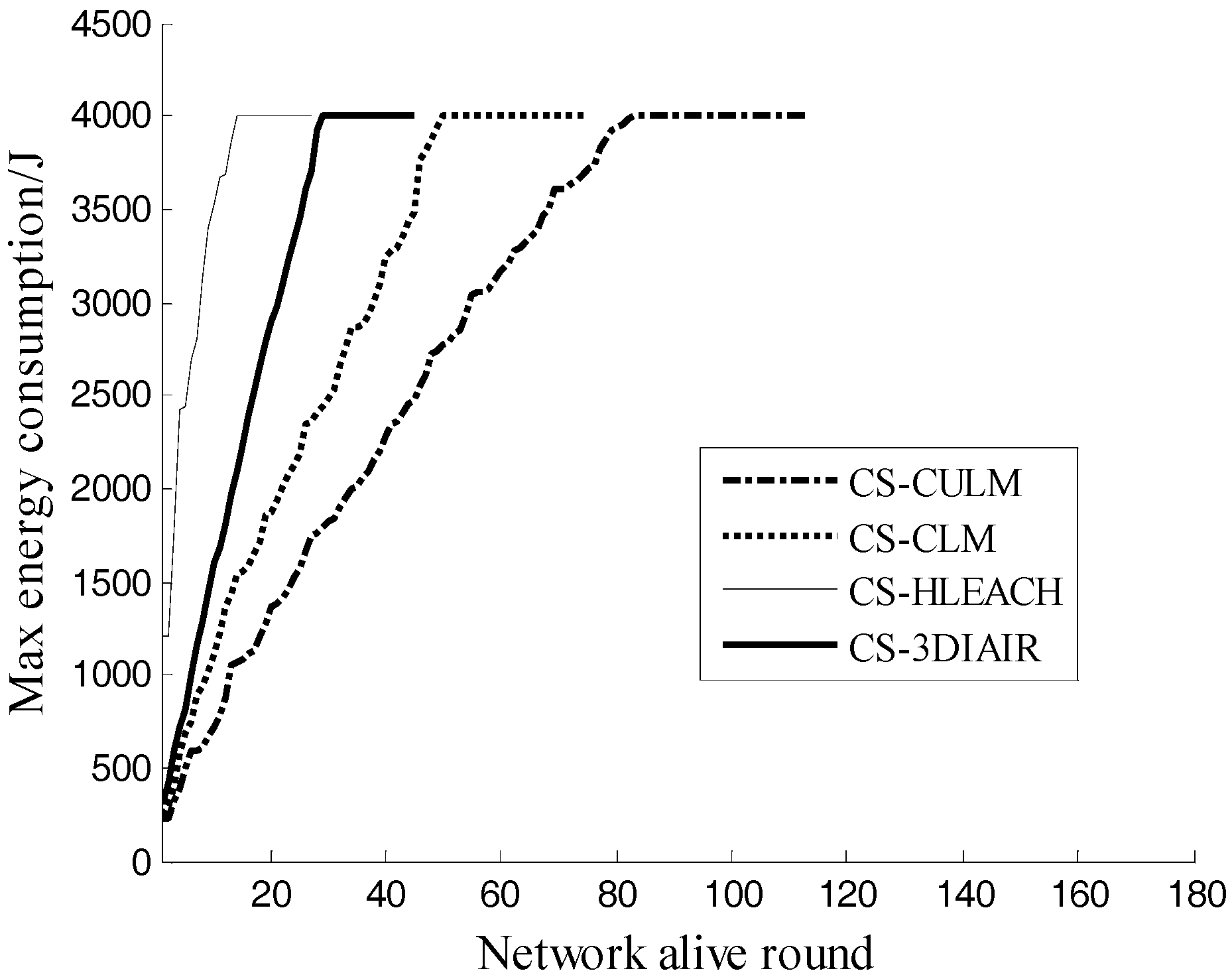
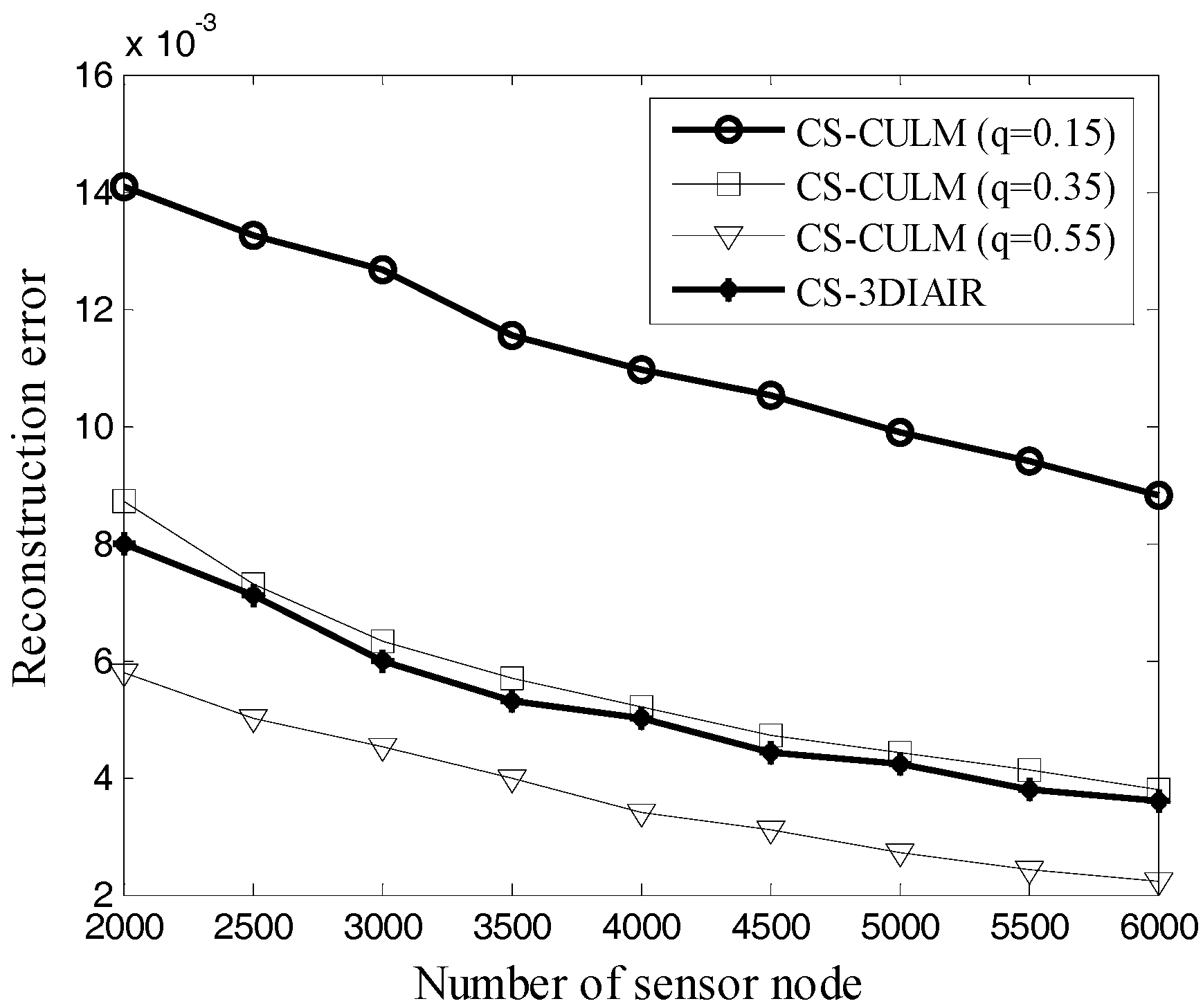
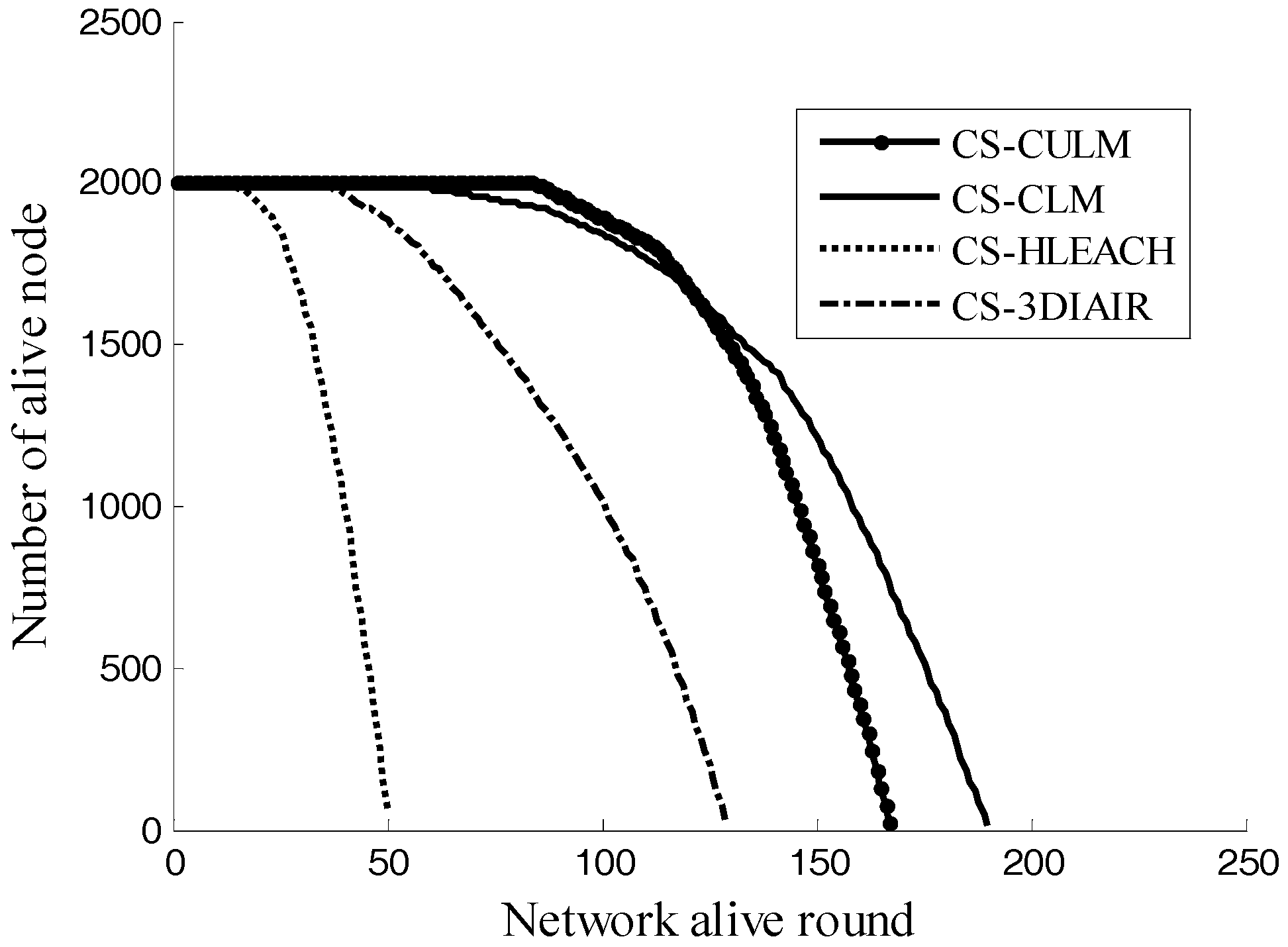
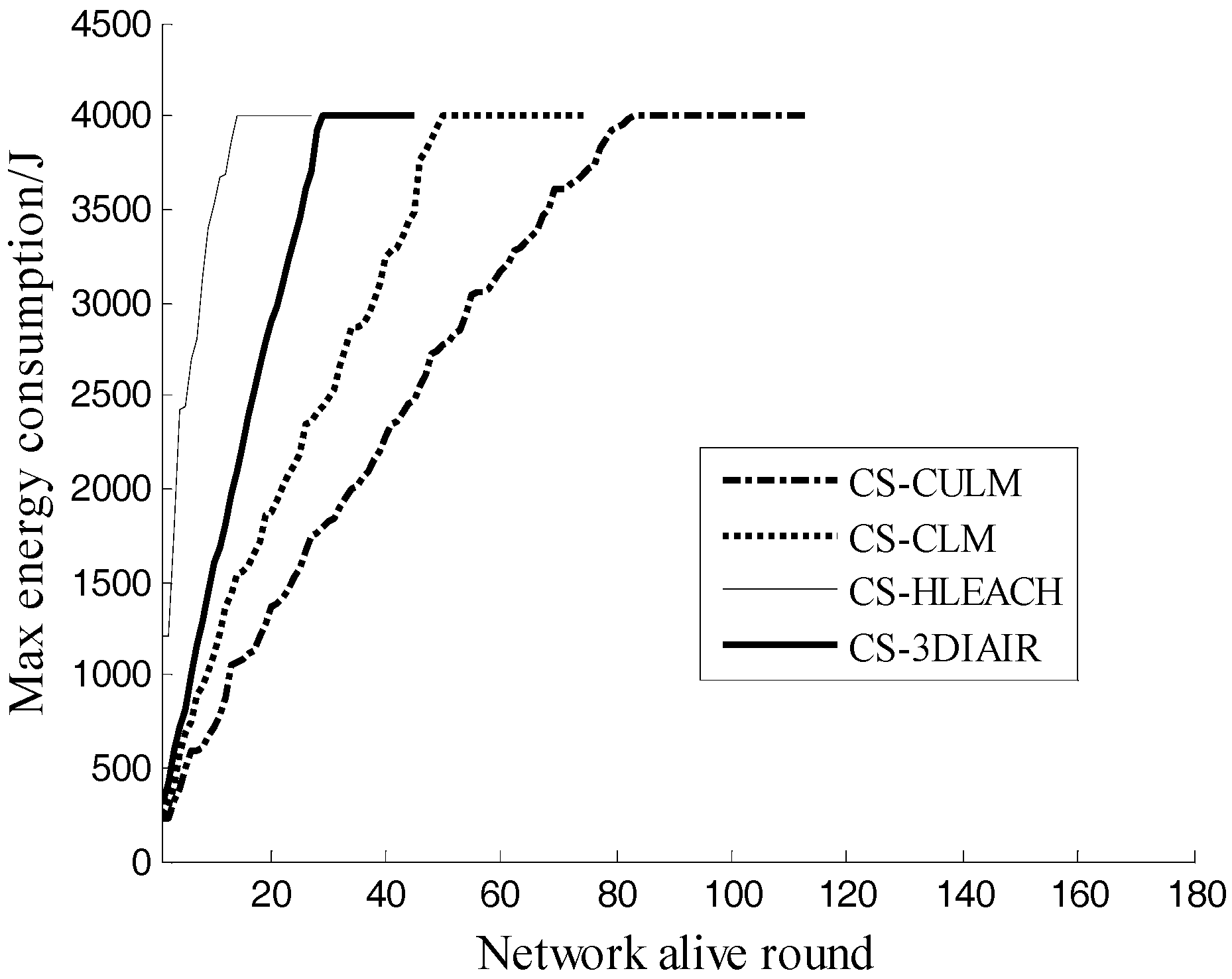
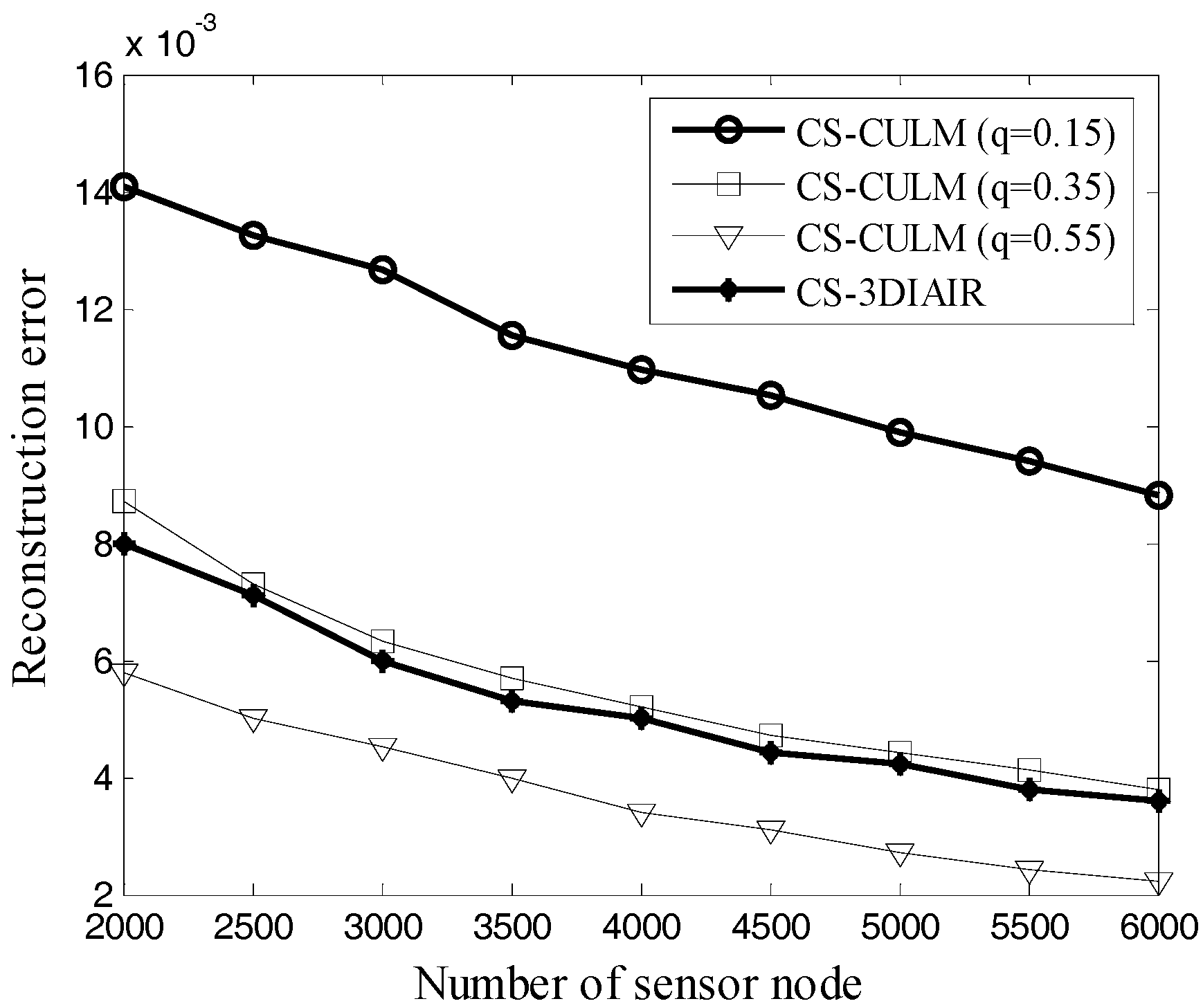
6. Simulations and Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cai, K.; Yin, Z.; Jiang, H. Onion map: A scalable geometric addressing and routing scheme for 3D sensor networks. IEEE Trans. Wirel. Commun. 2015, 14, 57–68. [Google Scholar] [CrossRef]
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Duan, J.; Li, D.; Chen, W. Geometric routing precluding loops and dead ends in 3-D wireless sensor networks. In Proceedings of the 2010 IEEE Global Telecommunications Conference (GLOBECOM), Miami, FL, USA, 6–10 December 2010; Volume 1, pp. 1–5. [Google Scholar]
- Candès, E.J.; Tao, T. Near optimal signal recovery from random projections: Universal encoding strategies? IEEE Trans. Inform. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef]
- Bajwa, W.U.; Haupt, J.D.; Sayeed, A.M.; Nowak, R.D. Joint source–channel communication for distributed estimation in sensor networks. IEEE Trans. Inf. Theory 2007, 53, 3629–3653. [Google Scholar] [CrossRef]
- Chen, H.; Wu, X.; Huang, C. A novel data gathering algorithm based on compressed sensing for heterogeneous wireless sensor networks. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; Volume 1, pp. 451–455. [Google Scholar]
- Needell, D.; Vershynin, R. Uniform uncertainty principle and signal recovery via regularized orthogonal matching pursuit. Found. Comp. Math. 2009, 9, 317–334. [Google Scholar] [CrossRef]
- Bassi, F.; Liu, C.; Iwaza, L. Compressive linear network coding for efficient data collection in wireless sensor networks. In Proceedings of the 20th European Signal Processing Conference, Bucharest, Romania, 27–31 August 2012; Volume 1, pp. 714–718. [Google Scholar]
- Robert, J.U. Principles of Underwater Sound; McGraw-Hill: New York, NY, USA, 1983; pp. 158–162. [Google Scholar]
- Zorzi, M.; Casari, P.; Baldo, N. Energy-efficient routing schemes for underwater acoustic networks. IEEE J. Sel. Areas Commun. 2008, 26, 1754–1766. [Google Scholar] [CrossRef]
- Xie, L.; Zhang, X. 3D clustering-based camera wireless sensor networks for maximizing lifespan with minimum coverage rate constraint. In Proceedings of the 2013 Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; Volume 1, pp. 298–303. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Energy Parameters | (bps/Hz) | (dB) | (W) | (kHz) | |
|---|---|---|---|---|---|
| Value | 0.5 | 0.5 | 8 | 0.5 | 9 |
| Type | Parameter | Value |
|---|---|---|
| Network | Grid size | 20 × 20 × 20 |
| Actual scale (km) | 37.4 × 44.4 × 0.8 | |
| Initial energy (J) | 4000 | |
| Number of sensor nodes | 2000 | |
| Packet | Data packet size (byte) | 1282 |
| Broadcast packet size (byte) | 5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Yang, H.; Liu, G.; Peng, X. An Energy-Efficient Routing Algorithm in Three-Dimensional Underwater Sensor Networks Based on Compressed Sensing. Information 2017, 8, 66. https://doi.org/10.3390/info8020066
Li B, Yang H, Liu G, Peng X. An Energy-Efficient Routing Algorithm in Three-Dimensional Underwater Sensor Networks Based on Compressed Sensing. Information. 2017; 8(2):66. https://doi.org/10.3390/info8020066
Chicago/Turabian StyleLi, Bo, Hongjuan Yang, Gongliang Liu, and Xiyuan Peng. 2017. "An Energy-Efficient Routing Algorithm in Three-Dimensional Underwater Sensor Networks Based on Compressed Sensing" Information 8, no. 2: 66. https://doi.org/10.3390/info8020066
APA StyleLi, B., Yang, H., Liu, G., & Peng, X. (2017). An Energy-Efficient Routing Algorithm in Three-Dimensional Underwater Sensor Networks Based on Compressed Sensing. Information, 8(2), 66. https://doi.org/10.3390/info8020066