
An Integrated Blockchain Framework for Secure Autonomous Vehicle Communication System

 ,
,  ,
,  , , , and
, , , and 
Abstract

1. Introduction
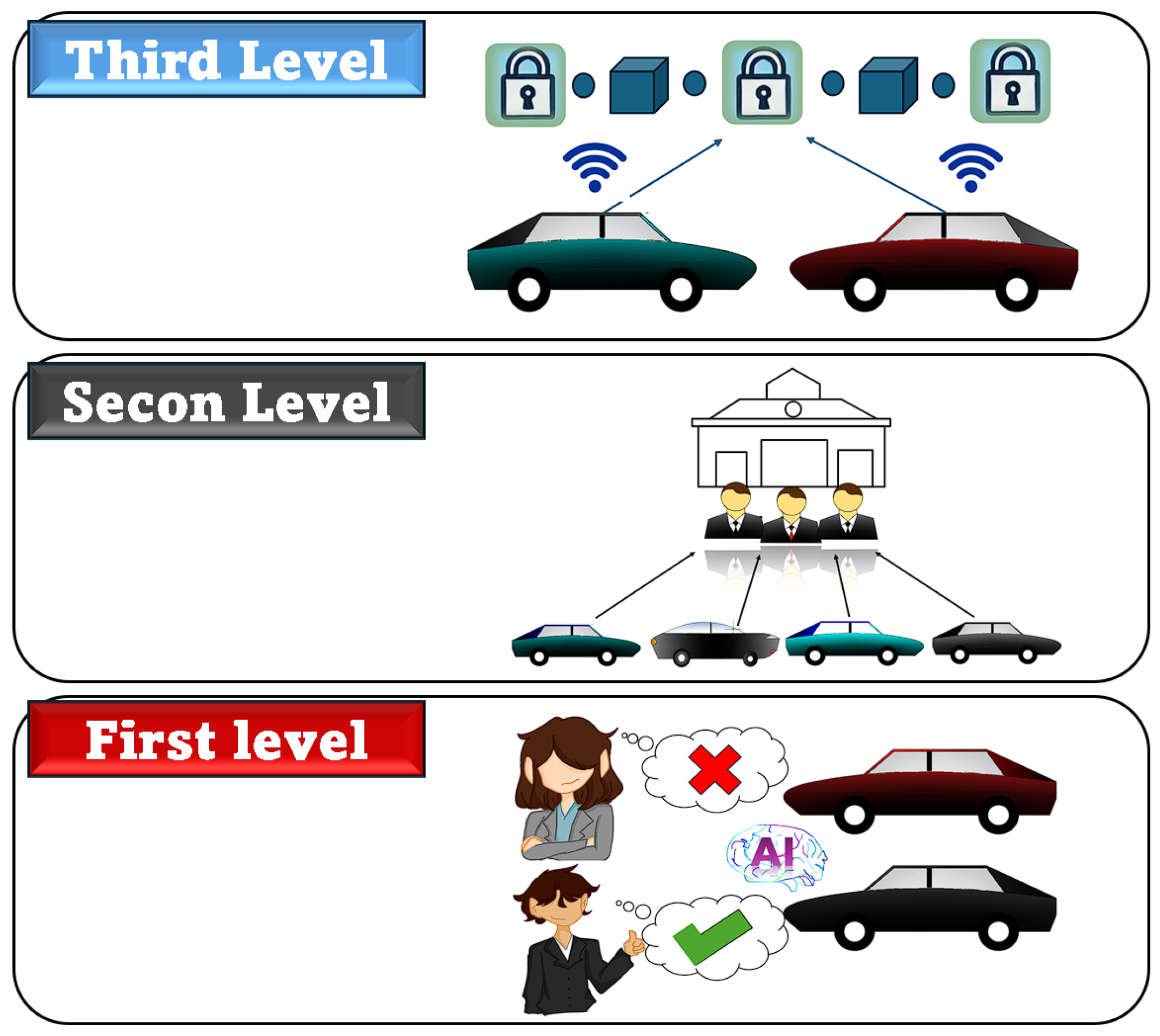
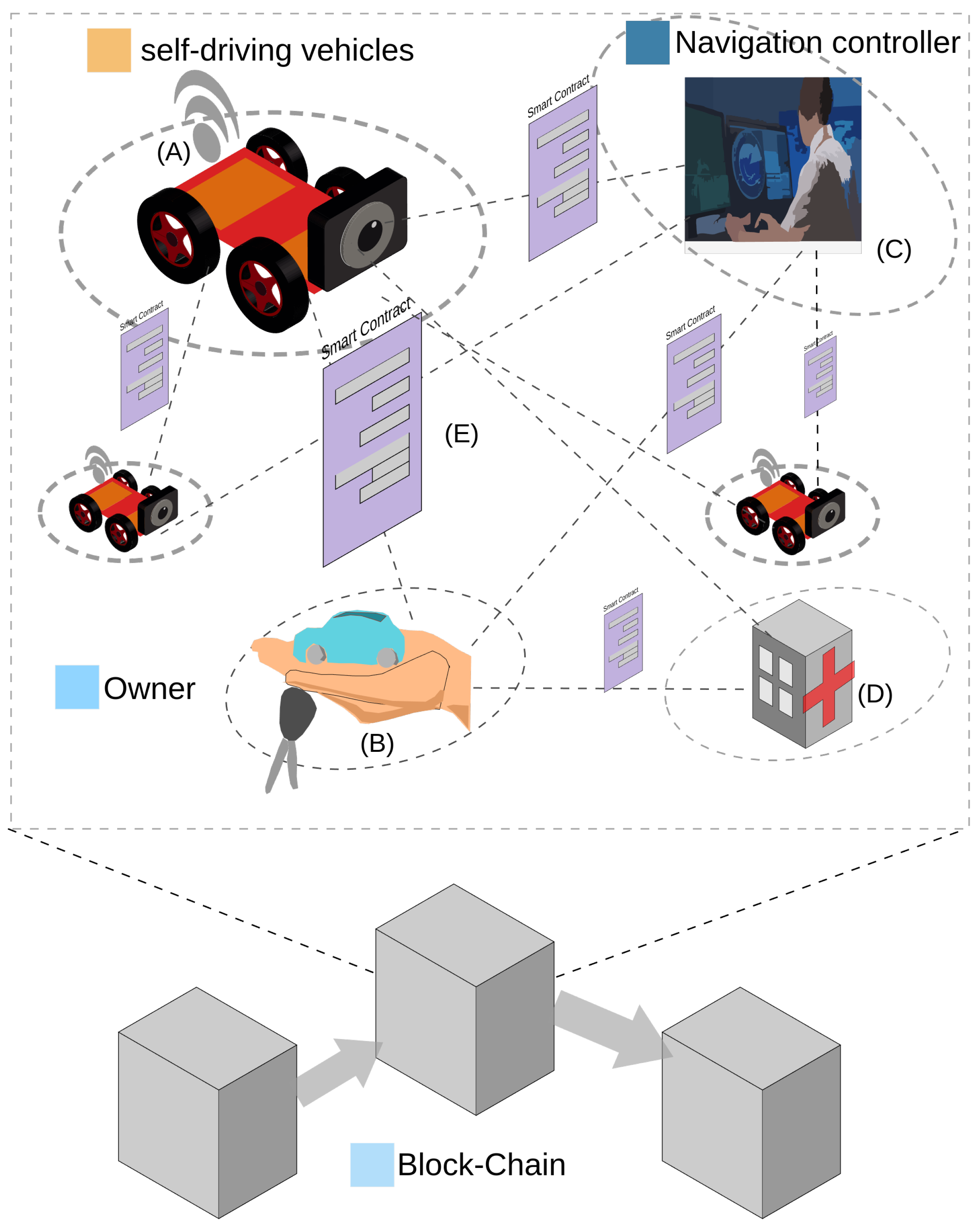
- The first level of authorization is where the human controls and enables the Artificial Intelligence of the autonomous vehicle.
- The second level describes the scenario where information exchange occurs between the AV and the navigation authority.
- The third level belongs to the cases involving collaboration and conflict resolution between navigating vehicles in the Blockchain network.
- The Blockchain network is dedicated to the research and technological development of AV in navigation.
- Decentralized network communication clients powered by IoT technologies and communication with Smart-Contracts.
- Smart-Contracts designed for autonomous navigation considering public and private privileges requested for an autonomous vehicle in a decentralized network.
2. Proposed Framework
2.1. Related Work
2.2. DEMU-NAV Framework
3. Materials and Methods
3.1. Software Architecture
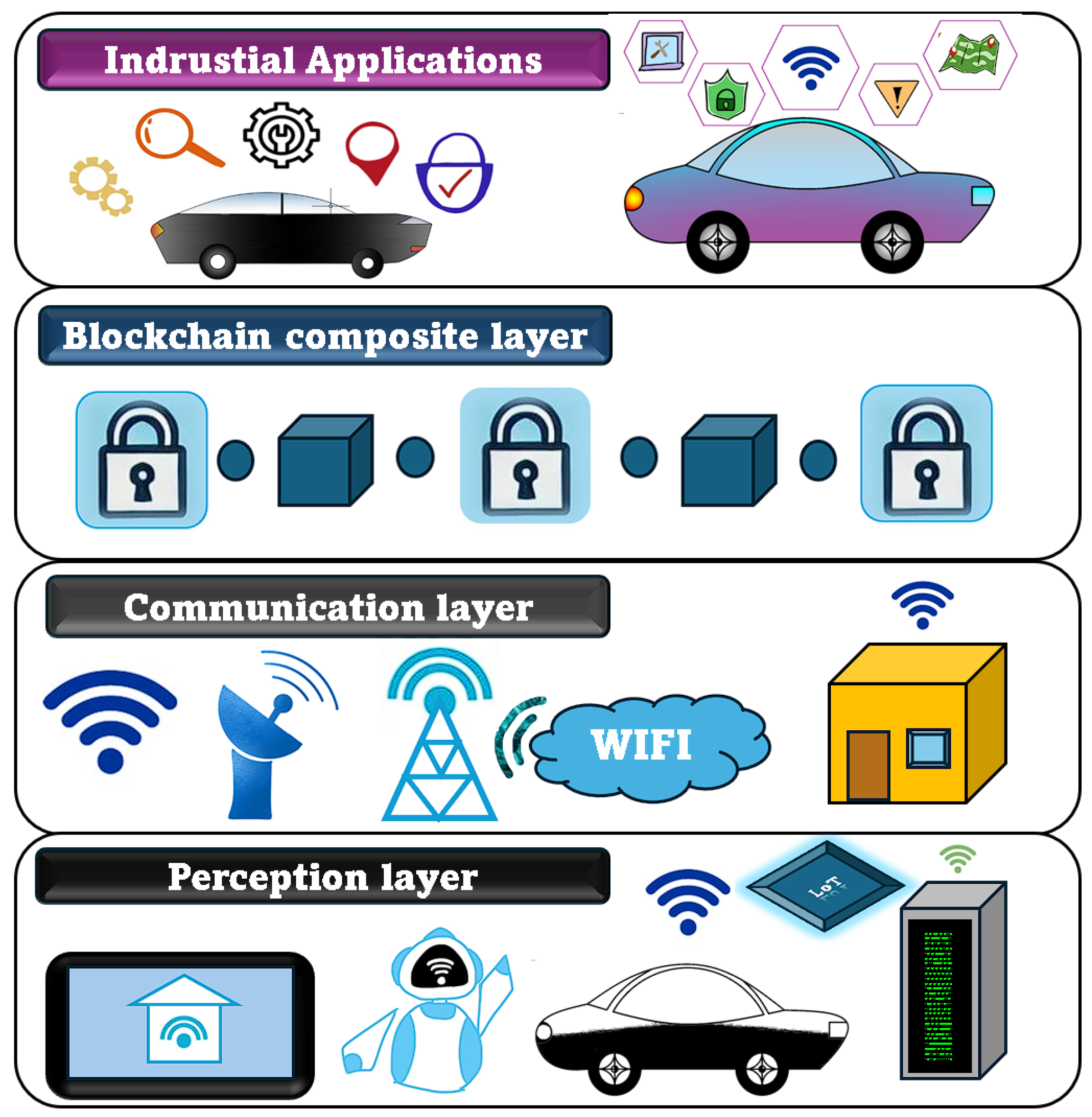
- Perception Layer: This layer collects data from all IoT devices, such as sensors, computers, cameras, robots, mobile devices, and others. The current layer involves an independent vehicle that is capable of identifying other vehicles, traffic lights, and various objects on the road. The following sections present examples that illustrate the interaction between the elements of this layer and the layers above.
- Communication Layer: Such as in the OSI (Open Systems Interconnection) Model, the third layer contains network devices that aim to decide the physical paths the data will take. The communication layer is similar to the OSI’s Network-Layer in charge of managing the information from mobile devices. In this case, communication can be managed by LoRa, WiFi AP, IoT gateway, and routers.
- Blockchain Composite layer: The Blockchain layer is the most important part due to its complexity and functionality. According to the BCIoT model, this layer has five sub-layers that allow data storage; the network layer is the propagation and verification mechanism; the consensus layer is the incentive layer to make the transactions and reward; and finally, the Service layer with Smart-Contracts.
- Industrial Applications: Only one industrial application was presented, but our software could support other problems such as manufacturing, Supply chain, food Industry, smart grid, and health care.
3.2. Internet of Things
3.3. Blockchain
3.3.1. Self-Driving Blockchain
3.3.2. Self-Driving Permissioned Blockchain
3.3.3. Crypto-Security
3.3.4. Self-Driving Net Authentication
3.3.5. Smart-Contract
3.3.6. Software Functionalities
- Smart-Contracts. This package contains modules and functions to manipulate and create Smart-Contracts. This folder contains five files,IIoT.abi,IIoT.sol,IIoT_hash_Blockchain.txt,IIoT_sol_IIoT_Register.abi andIIoT_sol_IIoT_Register.bin
- Client. This package contains three archives (app.js, package-lock.json, and pacakage.json) and one package with all classes, and for this work we call “nodes,” which manage the Block-Chase and Smart-Contracts. Some examples of these nodes are parses, content-disposition, cookies, crypto-js, media-describers, general methods, among others.
- Self-Driving Permissioned Blockchain. This package contains two packages, geth and keystore, which allows it to be manipulated through different classes such as transactions, nodes, and metadata, among others.
- IoT-Client. This folder contains one package and two classes codified in Python. These classes let us manipulate the IoT element with Python.
3.3.7. Installation
- Code 1. DEMU-NAV repository link available for download.

- Code 2. DEMU-NAV installation and implementation.

4. Numerical Results and Simulations
4.1. Experimental Results
4.2. Implementation of DEMU-NAV

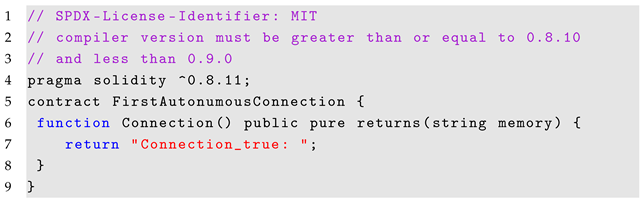
- Code 3. First connection with the Blockchain and autonomous vehicle.

- Code 4. Smart contract for verification of connection to the decentralized navigation network.
- Code 5. Compilation result of Code 4, which is configured for the Application Binary Interface (ABI) standard.

- Code 6. The first instruction attaches the smart contract address of Code 4. The second instruction invokes the public function connecting the smart contract to the Blockchain net.


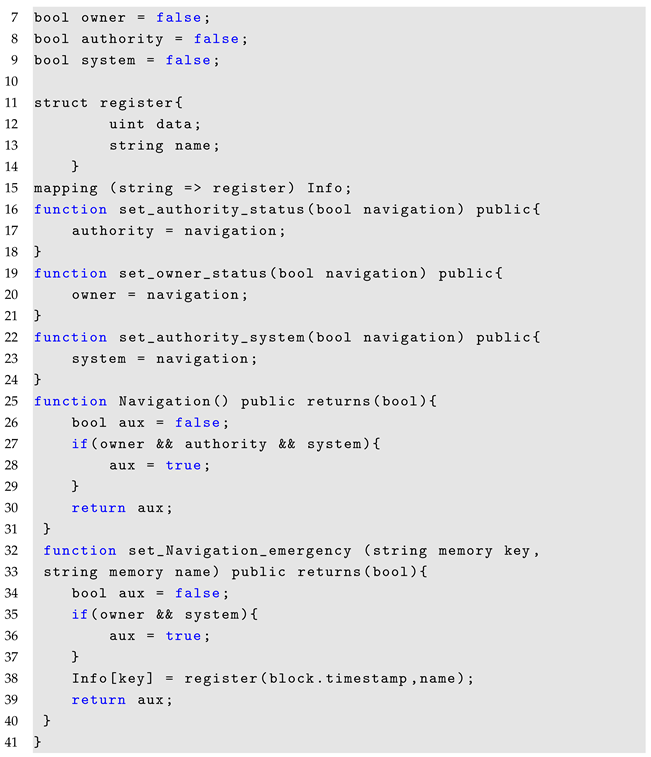
- First level: the vehicle consults the permissions granted in previous states with Function Navigation() (lines 24 to 30). The function grants the navigation permission or declines it depending on if its owner or the navigation authority.
- Second level: In function set_owner_status() (lines 18 to 20), the vehicle’s legal proxy grants the permission to navigate, pointing out that any change implies a record in the Blockchain.
- Third level: the navigation authority publishes in the decentralized network the navigation status of the vehicle with Function set_authority_system() (lines 21 to 23).
- Finally, in Function set_Navigation_emergency() (lines 31 to 39), the contract allows a navigation exception, provided by legal proxy requests based on an emergency, which will have an obligation to register in the network and present a witness (e.g., the legal representative of the hospital).
- Code 7. Smart contract for navigation depending on the system’s status, legal proxy, and control authority.

- Code 8. Loading contract’s index in .abi format for autonomous vehicle interaction.

- Code 9. Navigation status request of the autonomous vehicle.

- Code 10. Request for navigation dictated by the legal proxy.

- Code 11. Navigation authorization by regulatory or governmental authority.

- Code 12. Authorization of navigation by the legal representative of the vehicle and the traffic controller.

- Code 13. Case of omission of navigation restriction in the event of a legal proxy emergency.


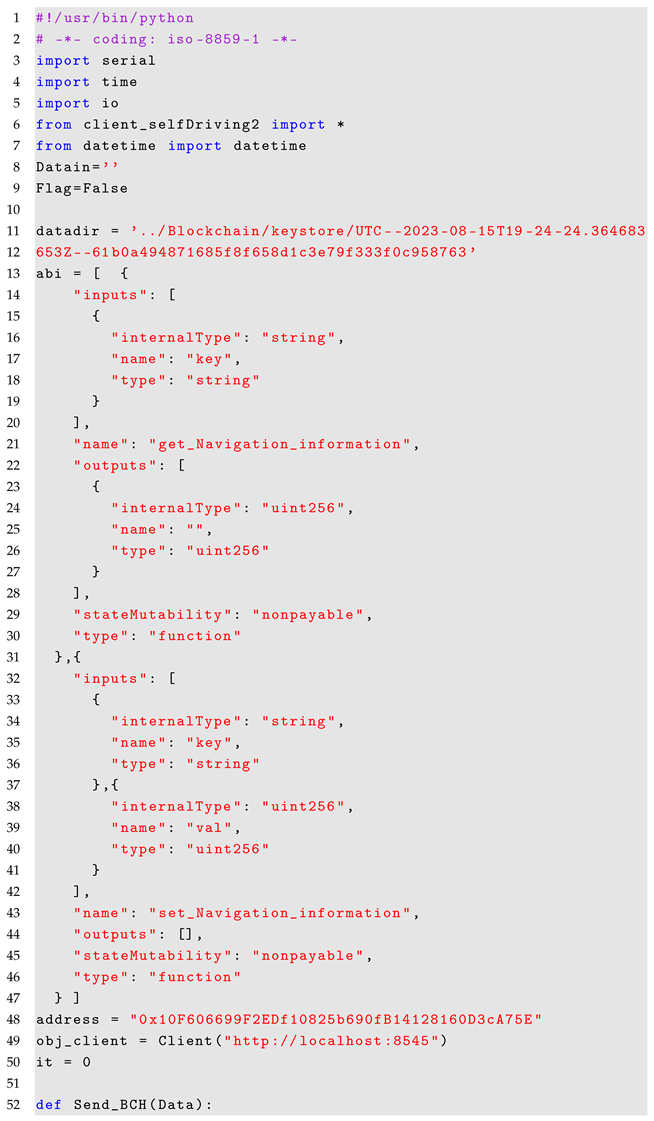
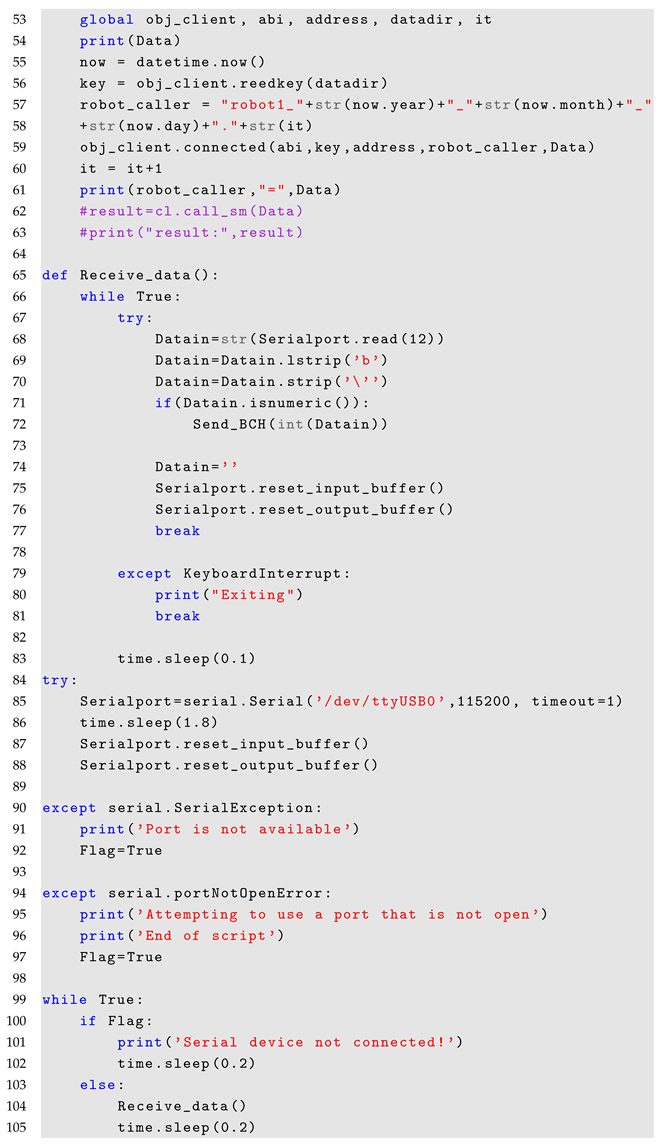
- Code 14. Receiving antenna client in LoRa technology standard and information recording in the Blockchain.
- Code 15. Example of information registration in smart contract and IoT interaction.

5. Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nastjuk, I.; Herrenkind, B.; Marrone, M.; Brendel, A.B.; Kolbe, L.M. What drives the acceptance of autonomous driving? An investigation of acceptance factors from an end-user’s perspective. Technol. Forecast. Soc. Change 2020, 161, 120319. [Google Scholar] [CrossRef]
- Maurer, M.; Gerdes, J.; Lenz, B.; Winner, H. Autonomous Driving: Technical, Legal and Social Aspects; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Bartneck, C.; Lütge, C.; Wagner, A.; Welsh, S. An Introduction to Ethics in Robotics and AI; SpringerBriefs in Ethics; Springer International Publishing: Berlin/Heidelberg, Germany, 2020. [Google Scholar] [CrossRef]
- Ratoff, W. Self-driving Cars and the Right to Drive. Philos. Technol. 2022, 35, 1–15. [Google Scholar] [CrossRef]
- Cunneen, M.; Mullins, M.; Murphy, F. Autonomous Vehicles and Embedded Artificial Intelligence: The Challenges of Framing Machine Driving Decisions. Appl. Artif. Intell. 2019, 33, 706–731. [Google Scholar] [CrossRef]
- Wang, X.; Qi, X.; Wang, P.; Yang, J. Decision making framework for autonomous vehicles driving behavior in complex scenarios via hierarchical state machine. Auton. Intell. Syst. 2021, 1, 10. [Google Scholar] [CrossRef]
- Langer, M.; Oster, D.; Speith, T.; Hermanns, H.; Kästner, L.; Schmidt, E.; Sesing, A.; Baum, K. What do we want from Explainable Artificial Intelligence (XAI)?—A stakeholder perspective on XAI and a conceptual model guiding interdisciplinary XAI research. Artif. Intell. 2021, 296, 103473. [Google Scholar] [CrossRef]
- Biswas, A.; Wang, H.C. Autonomous Vehicles Enabled by the Integration of IoT, Edge Intelligence, 5G, and Blockchain. Sensors 2023, 23, 1963. [Google Scholar] [CrossRef]
- Padmaja, B.; Moorthy, C.V.; Venkateswarulu, N.; Bala, M.M. Exploration of issues, challenges and latest developments in autonomous cars. J. Big Data 2023, 10, 1–24. [Google Scholar] [CrossRef]
- Jain, S.; Ahuja, N.J.; Srikanth, P.; Bhadane, K.V.; Nagaiah, B.; Kumar, A.; Konstantinou, C. Blockchain and Autonomous Vehicles: Recent Advances and Future Directions. IEEE Access 2021, 9, 130264–130328. [Google Scholar] [CrossRef]
- Narbayeva, S.; Bakibayev, T.; Abeshev, K.; Makarova, I.; Shubenkova, K.; Pashkevich, A. Blockchain Technology on the Way of Autonomous Vehicles Development. Transp. Res. Procedia 2020, 44, 168–175. [Google Scholar] [CrossRef]
- Bendiab, G.; Hameurlaine, A.; Germanos, G.; Kolokotronis, N.; Shiaeles, S. Autonomous Vehicles Security: Challenges and Solutions Using Blockchain and Artificial Intelligence. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3614–3637. [Google Scholar] [CrossRef]
- Liang, J.; Li, Y.; Yin, G.; Xu, L.; Lu, Y.; Feng, J.; Shen, T.; Cai, G. A MAS-Based Hierarchical Architecture for the Cooperation Control of Connected and Automated Vehicles. IEEE Trans. Veh. Technol. 2023, 72, 1559–1573. [Google Scholar] [CrossRef]
- Okere, E.E.; Balyan, V. Advances in Blockchain-Based Internet of Vehicles Application: Prospect for Machine Learning Integration. Future Internet 2024, 16, 449. [Google Scholar] [CrossRef]
- Iordache, S.; Patilea, C.C.; Paduraru, C. Enhancing Autonomous Vehicle Safety with Blockchain Technology: Securing Vehicle Communication and AI Systems. Future Internet 2024, 16, 471. [Google Scholar] [CrossRef]
- Dai, H.N.; Zheng, Z.; Zhang, Y. Blockchain for Internet of Things: A survey. IEEE Internet Things J. 2019, 6, 8076–8094. [Google Scholar] [CrossRef]
- Kumar, S.; Tiwari, P.; Zymbler, M. Internet of Things is a revolutionary approach for future technology enhancement: A review. J. Big Data 2019, 6, 2–21. [Google Scholar] [CrossRef]
- Ateya, A.A.; Mahmoud, M.; Zaghloul, A.; Soliman, N.F.; Muthanna, A. Empowering the Internet of Things Using Light Communication and Distributed Edge Computing. Electronics 2022, 11, 1511. [Google Scholar] [CrossRef]
- Kim, M.; Man, K.; Helil, N. Advanced Internet of Things and Big Data Technology for Smart Human-Care Services. J. Sens. 2019, 1, 1–3. [Google Scholar] [CrossRef]
- Taherdoost, H. Security and Internet of Things: Benefits, Challenges, and Future Perspectives. Electronics 2023, 12, 1901. [Google Scholar] [CrossRef]
- Feng, X.; Yan, F.; Liu, X. Study of Wireless Communication Technologies on Internet of Things for Precision Agriculture. Wirel. Pers. Commun. 2019, 108, 1785–1802. [Google Scholar] [CrossRef]
- Gresl, J.; Fazackerley, S.; Lawrence, R. Practical Precision Agriculture with LoRa based Wireless Sensor Networks. In Proceedings of the 10th International Conference on Sensor Networks, Online, 9–10 February 2021; SciTePress: Setúbal, Portugal, 2021; Volume 1: WSN4PA. INSTICC, pp. 131–140. [Google Scholar] [CrossRef]
- Andrade, R.O.; Yoo, S.G. A Comprehensive Study of the Use of LoRa in the Development of Smart Cities. Appl. Sci. 2019, 9, 4753. [Google Scholar] [CrossRef]
- Bojja, S.; Mahamood, M. Design and Implementation of Framework for Smart City Using LoRa Technology. SREYAS Int. J. Sci. Technocr. 2017, 1, 36–43. [Google Scholar] [CrossRef]
- Simoens, P.; Dragone, M.; Saffiotti, A. The Internet of Robotic Things: A review of concept, added value and applications. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418759424. [Google Scholar] [CrossRef]
- Spoorthi, A.S.; Sunil, T.D.; Kurian, M.Z. Implementation of LoRa based autonomous agriculture robot. Int. J. Commun. Comput. Technol. 2021, 9, 34–39. [Google Scholar] [CrossRef]
- Ray, P.P. Internet of Robotic Things: Concept, Technologies, and Challenges. IEEE Access 2016, 4, 9489–9500. [Google Scholar] [CrossRef]
- Vermesan, O.; Bahr, R.; Ottella, M.; Serrano, M.; Karlsen, T.; Wahlstrøm, T.; Sand, H.E.; Ashwathnarayan, M.; Gamba, M.T. Internet of Robotic Things Intelligent Connectivity and Platforms. Front. Robot. AI 2020, 7, 104. [Google Scholar] [CrossRef]
- Lopes, V.; Alexandre, L.A. An Overview of Blockchain Integration with Robotics and Artificial Intelligence. Ledger 2019, 4, 1–6. [Google Scholar] [CrossRef]
- Taherdoost, H. Blockchain Technology and Artificial Intelligence Together: A Critical Review on Applications. Appl. Sci. 2022, 12, 12948. [Google Scholar] [CrossRef]
- Johnson, D.; Menezes, A.; Vanstone, S. The Elliptic Curve Digital Signature Algorithm (ECDSA). Int. J. Inf. Secur. 2001, 1, 36–63. [Google Scholar] [CrossRef]
- Wood, G. Ethereum: A secure decentralised generalised transaction ledger. Ethereum Proj. Yellow Pap. 2014, 151, 1–32. [Google Scholar]
- Alanazi, F. The future of transportation: Blockchain-powered solutions. Transp. J. 2024, 64, 10. [Google Scholar] [CrossRef]
- Rakhmanov, A.; Wiseman, Y. Compression of GNSS Data with the Aim of Speeding up Communication to Autonomous Vehicles. Remote Sens. 2023, 15, 2165. [Google Scholar] [CrossRef]
- Prashar, D.; Jha, N.; Jha, S.; Joshi, G.P.; Seo, C. Integrating IoT and Blockchain for Ensuring Road Safety: An Unconventional Approach. Sensors 2020, 20, 3296. [Google Scholar] [CrossRef] [PubMed]
- Shahzad, A.; Gherbi, A.; Zhang, K. Enabling Fog–Blockchain Computing for Autonomous-Vehicle-Parking System: A Solution to Reinforce IoT–Cloud Platform for Future Smart Parking. Sensors 2022, 22, 4849. [Google Scholar] [CrossRef] [PubMed]
- Ali, S.; Abuhmed, T.; El-Sappagh, S.; Muhammad, K.; Alonso-Moral, J.M.; Confalonieri, R.; Guidotti, R.; Del Ser, J.; Díaz-Rodríguez, N.; Herrera, F. Explainable Artificial Intelligence (XAI): What we know and what is left to attain Trustworthy Artificial Intelligence. Inf. Fusion 2023, 99, 101805. [Google Scholar] [CrossRef]
- Kang, Y.; Kim, W.; Kim, H.; Lee, M.; Song, M.; Seo, H. Malicious Contract Detection for Blockchain Network Using Lightweight Deep Learning Implemented through Explainable AI. Electronics 2023, 12, 3893. [Google Scholar] [CrossRef]
- Chen, H.Y.; Sharma, K.; Sharma, C.; Sharma, S. Integrating explainable artificial intelligence and Blockchain to smart agriculture: Research prospects for decision making and improved security. Smart Agric. Technol. 2023, 6, 100350. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
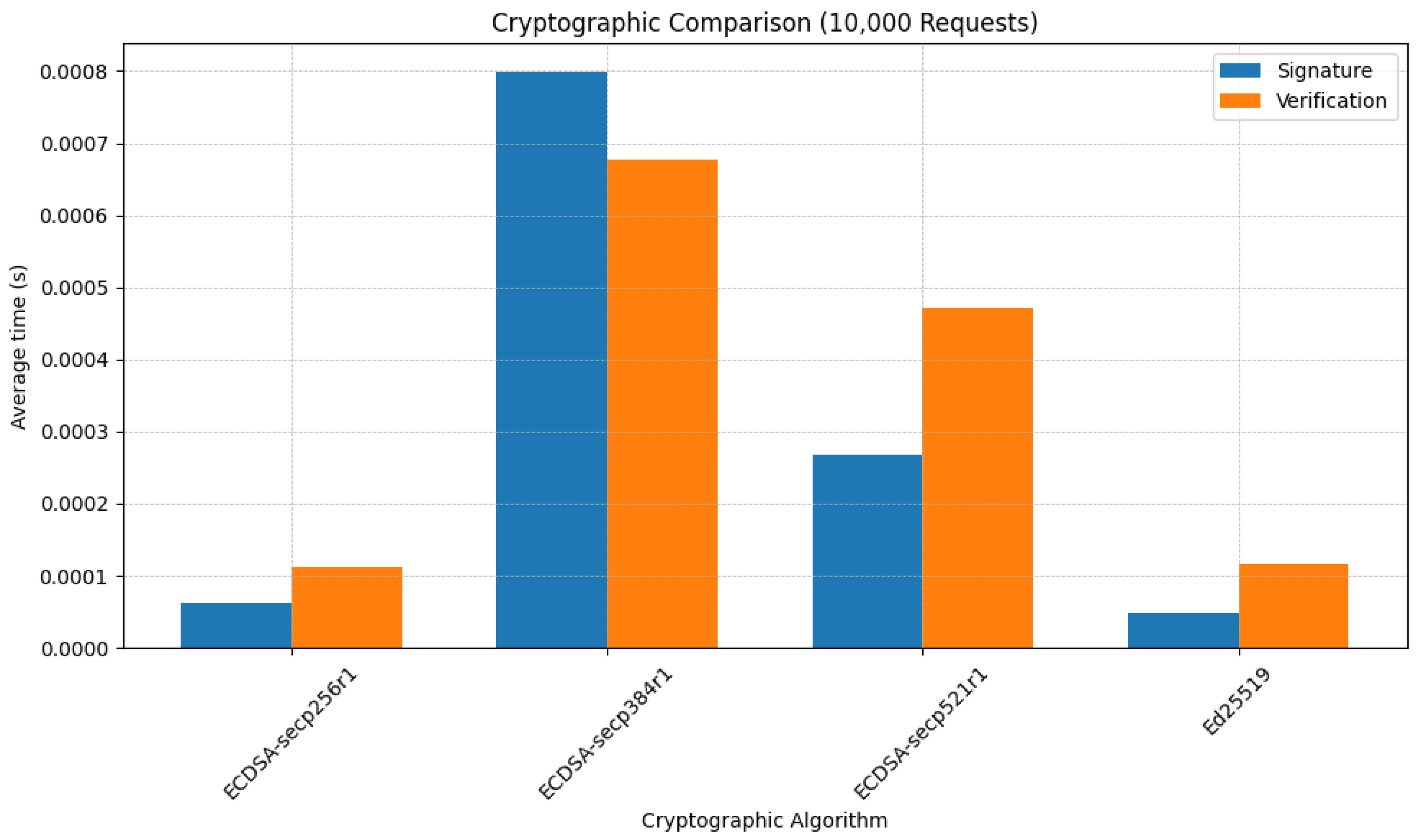
| Algorithm | Time Signature | Time Verification | Total Time | Memory |
|---|---|---|---|---|
| ECDSA-secp256r1 | 4.29 × 10−5 | 7.41 × 10−5 | 1.17 × 10−4 | 1.20 × 10−2 |
| Ed25519 | 4.84 × 10−5 | 1.17 × 10−4 | 1.65 × 10−4 | 0.00 |
| ECDSA-secp521r1 | 2.70 × 10−4 | 4.76 × 10−4 | 7.46 × 10−4 | 0.00 |
| ECDSA-secp384r1 | 7.40 × 10−4 | 6.28 × 10−4 | 1.37 × 10−3 | 0.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Anda-Suárez, J.; López-Ramírez, J.L.; Jimenez-Mendoza, D.; Benitez-Quintero, J.M.; Avina-Bravo, E.G.; Gutierrez-Hernandez, D.A.; Avina-Cervantes, J.G. An Integrated Blockchain Framework for Secure Autonomous Vehicle Communication System. Information 2025, 16, 557. https://doi.org/10.3390/info16070557
de Anda-Suárez J, López-Ramírez JL, Jimenez-Mendoza D, Benitez-Quintero JM, Avina-Bravo EG, Gutierrez-Hernandez DA, Avina-Cervantes JG. An Integrated Blockchain Framework for Secure Autonomous Vehicle Communication System. Information. 2025; 16(7):557. https://doi.org/10.3390/info16070557
Chicago/Turabian Stylede Anda-Suárez, Juan, José Luis López-Ramírez, Daniel Jimenez-Mendoza, José Manuel Benitez-Quintero, Eli Gabriel Avina-Bravo, David Asael Gutierrez-Hernandez, and Juan Gabriel Avina-Cervantes. 2025. "An Integrated Blockchain Framework for Secure Autonomous Vehicle Communication System" Information 16, no. 7: 557. https://doi.org/10.3390/info16070557
APA Stylede Anda-Suárez, J., López-Ramírez, J. L., Jimenez-Mendoza, D., Benitez-Quintero, J. M., Avina-Bravo, E. G., Gutierrez-Hernandez, D. A., & Avina-Cervantes, J. G. (2025). An Integrated Blockchain Framework for Secure Autonomous Vehicle Communication System. Information, 16(7), 557. https://doi.org/10.3390/info16070557