1. Introduction
Carbon dioxide emissions are already at a level higher than the target level set by the Paris Agreement [
1] and the transportation sector accounts for a significant portion of human-made emissions (16.2%). Road transportation, in particular, contributes 11.9% of worldwide emissions [
2]. Freight vehicles and urban and intercity buses generate over 6% of GHG emissions in the European Union and over 25% of the GHG emissions of the road transportation sector. Consequently, in the context of the European Green Deal, the European Commission has recommended a ban on the registration of new, non-zero GHG emission buses beginning in 2030 [
3].
The transition to a fleet of electric buses entails additional benefits beyond the elimination of emissions. One of them is the reduction in sound pollution, as electric motors are significantly quieter than equivalent internal combustion motors [
4,
5,
6]. This is quite significant in an urban environment, as speeds are relatively low and, as such, the impact of motor sounds is higher on sound pollution [
7,
8]. Furthermore, the use of electric traction in vehicles creates the possibility of utilizing more European and national energy sources in transportation, increasing the strategic autonomy of stakeholders. It is worth noting that electric buses require rare earth minerals for the production of their batteries. In 2020, China supplied 60% of these earth minerals [
9,
10].
Generally, three types of zero GHG emissions buses exist. Hydrogen buses, trolleybuses, and battery electric buses (BEB). This paper is concerned with the last type of buses. BEBs are often preferred to hydrogen buses due to their reduced cost [
11]. Compared to trolleybuses, the main benefit of BEBs is the lack of need for overhead wires. This offers greater flexibility in scheduling and may result in increased travel speeds [
12].
The penetration of BEBs into urban bus fleets varies significantly across the globe. In 2020, in China, BEBs accounted for 90% of new bus sales, while at the same time, they accounted for 6% of sales in the EU and 4% of sales in the US and Canada. However, there are some exceptions in the West: In the Netherlands, 81% of bus registrations involved zero-emissions buses, and California accounts for the majority of zero-emissions bus sales in the US and Canada [
13].
One of the causes of reduced BEB penetration is that in addition to their added cost, batteries create complications related to the vehicles’ autonomy [
14,
15]. As battery technology progresses, the autonomy of BEBs has increased significantly; thus, they are capable of completing a large number of trips before requiring recharging. Specifically, the 18650 model of lithium-ion batteries from Panasonic, with which the largest vehicle batteries are produced, had reached a specific energy level of 300 Wh/kg in 2020, when in 2010 it was at the level of 250 Wh/kg [
16]. However, this capacity is often not enough to cover the scheduling needs of a whole day [
17]. Consequently, BEBs often require charging during the day, resulting in increased downtime. Nowadays, there is the option of slow-charging buses with increased battery capacity (250–660 kWh) as well as the option of fast-charging buses with decreased battery capacity (50–250 kWh) [
18]. A typical slow-charging battery requires approximately 2 h for a full charge, while a fast-charging battery requires 20 min [
19].
Given their charging needs, BEBs have different scheduling requirements compared to conventional buses and trolleybuses. There is also the issue of the placement of charging stations, where the intent is to reduce the detour time required for buses needing to charge [
20,
21,
22]. Furthermore, grid capacity is also a concern at the location of charging stations, especially if several BEBs need to charge at the same time. This is exacerbated in the case of fast-charging stations, which have a maximum power draw of 600 kW [
23].
The problem of BEB scheduling is generally modeled as an electric vehicle scheduling problem (E-VSP). The E-VSP is a modification of the conventional vehicle scheduling problem (VSP), a classic problem in operations research. The VSP can be defined as follows: Given times and positions of the start and end points of trips, along with travel times between trip start and end points, vehicles must be scheduled in such a way as to ensure that every scheduled trip is performed exactly once and on time, every vehicle performs a valid sequence of trips, and the total cost is minimized. Costs may contain capital expenditures, such as vehicle procurement, and operational costs, such as energy costs and travel times [
24]. The E-VSP problem is modified to account for the charging needs of BEBs, ensuring that the state of charge (SoC) of electric buses remains above a safety threshold.
The aim of this paper is to optimize the scheduling of BEBs, resulting in the minimization of operational costs. It is taken into consideration that the various events (trips, charging) must start during specified time windows, buses can be scheduled from multiple depots, and chargers can be used by multiple buses, as long as they are not occupied. In addition, it is assumed that travel times are stochastic to account for daily disruptions. To tackle the above-described problem, a mixed-integer linear program (MILP) is developed. The aim is to minimize the mean operational cost, considering different scenarios of travel time variations. In the model formulation, we develop two model variants. The first (and more conservative) model variant requires that all constraints are satisfied for every travel time scenario, whereas the second model variant allows constraints to be satisfied up to a certain percentile to yield schedules with lower operational costs. To summarize, we compare three approaches:
- I.
The deterministic approach, which solves the electric bus scheduling problem using the mean values of travel times.
- II.
The conservative stochastic approach, which solves the electric bus scheduling problem using uncertain travel times and meeting the resource constraint requirements for all possible travel time realizations.
- III.
The chance constraint-based stochastic approach, which solves the electric bus scheduling problem using uncertain travel times and meeting the resource constraint requirements for a portion of possible travel time realizations.
The remainder of the paper is structured as follows: in
Section 2, a literature review is conducted, highlighting the contribution of our work. In
Section 3, the formulation of the problem and the solution methodology are presented. In
Section 4, the resulting models are evaluated using synthetic scheduling scenarios and a sensitivity analysis is performed. In
Section 5, the paper concludes with the discussion of the results and suggestions for further research.
3. Mathematical Formulation
3.1. The Multi-Depot Electric Vehicle Scheduling Problem with Time Windows (MDEVSPTW)
The MDEVSPTW formulation is introduced. Firstly, let K be the set of available buses (vehicles, henceforth). A network corresponds to each vehicle , where are the network nodes and the network arcs. In this representation of the network, every node is associated with a task with defined start and end locations, whereas the arcs represent the transit of a vehicle between two events. Each event needs to be served by exactly one vehicle.
The nodes of the network are split into the following categories:
Service Nodes.
Source & Sink Nodes.
Charging Nodes.
The set of all possible service nodes is V, where the node corresponds to a trip. This service node is additionally assigned a time window , indicating the time in which a trip is allowed to commence at the node.
Each vehicle k starts and ends its shift at the same depot, while the same vehicle cannot depart from and return to its depot more than once. The depot corresponding to the vehicle k is denoted with the source and sink nodes and , respectively, while O is the set of all source nodes and D the set of all sink nodes. At source nodes , the time window indicates the possible departure times from the corresponding depot and at sink nodes the possible arrival times.
Considering the charging needs of BEBs, the problem is formulated in such a way that vehicles visit charging stations when their SoC is low, necessitating their charging. The assumptions that are made regarding charging are the following:
Vehicles begin their shift fully charged at an energy level of .
Each charging station can be used by one vehicle at a time.
All charging stations have the same constant charging rate r.
Vehicles recharge fully to the energy level of .
Let Z be the set of charging stations and F the set of all possible charging events. Each possible charging event can start within the time window . The charging nodes (charging events, henceforth), that are associated with a charging station constitute the subset .
Each charging event and depot is available to all vehicles; thus, the set of all possible tasks of a vehicle
is represented by the set
where
indicates the trips that can be performed by the vehicle
k and is a subset of all possible trips
V. Consequently, the set of nodes available to all vehicles is
It follows that
.
For a vehicle , the set of feasible arcs is split into the following subsets:
Pull-out arcs: .
Pull-in arcs: .
Inter-trip transit arcs: .
Transit arcs, from trip to charging station: .
Transit arcs, from charging station to trip: .
The complete set of the network arcs corresponding to a vehicle
is
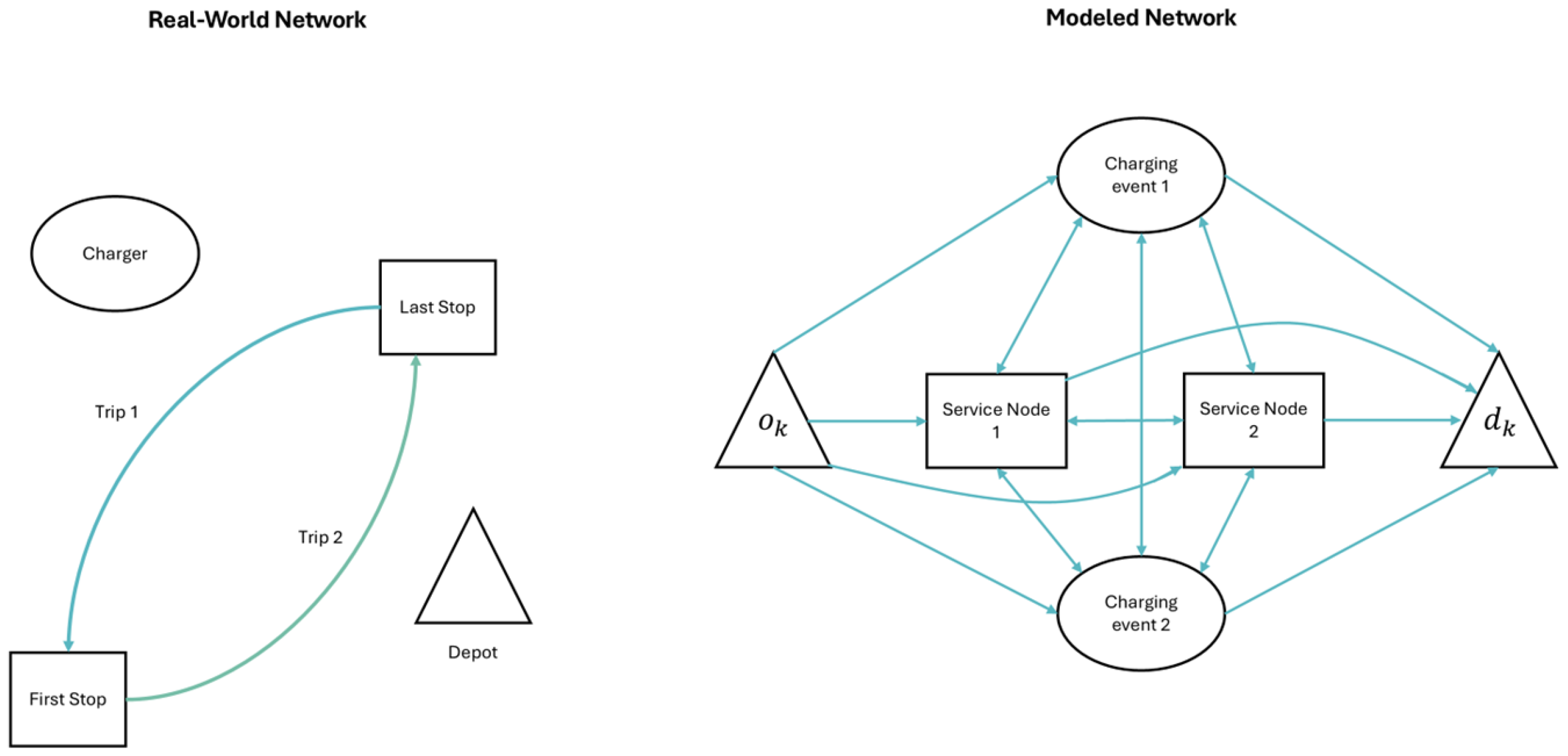
To provide an example, the translation of a real-world network with two trips, a depot, and a charging station is presented in
Figure 1. In the modeled network, the depot is represented by two nodes:
and
. The two trips are represented by the two service nodes, and the charger can offer two charging events, depicted as two different nodes in the modeled network.
The main decision variables of this formulation include the following:
: Binary flow variables, indicating the use of an arc by a vehicle .
: Binary variables, indicating the use of a charging event by a vehicle .
: Continuous variables, indicating the starting time of an event at a node .
At each service node , the completion of a trip incurs a travel cost (travel time, henceforth). The transit between the end location of a node and the start location of a node incurs a time cost . It is assumed that there are no movements made between source and charging nodes, as well as between sink and charging nodes.
Every vehicle is assigned a continuous variable which denotes the SoC of the vehicle when it arrives at the node . Considering that all charging stations have the same and constant charging rate r and vehicle k arrives at the charging node at time with SoC , the vehicle requires a charging time of to recharge fully. Specifically, vehicle k is allowed to depart from the charging node after time .
Additionally, every vehicle
is assigned a continuous variable
which denotes the SoC of the vehicle as it departs from the node
. When the vehicle departs from its source node
, at the start of its shift, it applies that
. At the remaining nodes
, it applies that
where
is a continuous variable indicating the SoC change during the visit of a vehicle
k at the node
.
At service nodes
, the SoC of the vehicle
k, while performing the corresponding trip, changes by
. Specifically,
is a predefined parameter that, in the case of this study, depends on the length of the trip. At charging nodes
, the vehicle recharges fully. Thus, it applies that
A vehicle is allowed to transit through an arc if and only if its SoC is sufficient during its arrival at the node j, namely if . At the same arc , the continuous variable is assigned, which denotes the change in the SoC of vehicle k, when it transits between the end location of the node i and the start location of the node j.
The operational costs are defined as the sum of the two following terms:
The operational costs for a vehicle for its transit through the arc , without waiting at the start location of the node j, denoted by the parameter .
The unit vehicle dwell cost, denoted by the parameter . That parameter, in turn, is multiplied by the difference between the starting time of the task at the node j (of the corresponding arc) and the time by which the vehicle k will have arrived at the start location of the node j:
- –
.
- –
.
- –
.
The resulting product is the operational cost of the vehicle k waiting at node j, until the task at the same node commences.
3.2. Extension of the MDEVSPTW Considering Travel Time Uncertainty
The above problem formulation assumes that the travel times
at service nodes do not display variability but remain constant. However, as it is mentioned in the relevant literature review section, bus travel times do exhibit variability because of the operation of buses in mixed traffic conditions. The following reformulation aims to address this issue. Let
S be the set that contains all possible scenarios with travel time values, where each outcome
has the same probability of actualization. The set
S is developed by assuming that travel times follow the log-normal distribution, which is the most common assumption in past studies [
49,
50]. Consequently, it follows that the natural logarithms (logarithms, henceforth) of the travel times follow the normal distribution, with a mean value
and a standard deviation
. By developing the set
S with possible travel time values, for each scenario
, we have a different travel time
at each service node
.
The introduction of multiple outcomes for travel times requires changes in the arc definitions of our network, as there cannot exist multiple outcomes for arcs , since the stochasticity of arc transit time was not considered in past studies. Consequently, service node travel times cannot be used in the definition of arcs, thus resulting in a less exclusive definition, as follows:
, for all , for all .
, for all , for all .
Thus, the set of feasible arcs in our revised formulation is defined as follows:
The introduction of travel time variability aims to help create robust bus routing schedules, with good performance in extreme scheduling conditions (large disruptions/delays), while adhering to the scheduling problem constraints (keeping operations at acceptable levels of service). The required nomenclature for the formulation of the problem is provided in
Table 2.
The aim of this model formulation is the minimization of the mean value of the possible operational costs
,
including the transit and dwell costs and considering all possible travel time scenarios
. Consequently, the objective function is defined as follows:
The operational costs
are defined with the following constraints:
which are nonlinear. To linearize them, one can replace them with the following equisatisfiable constraints:
In addition, the following constraints perform the assignment of vehicles:
Constraint (
11) ensures that every service node
will be matched with exactly one vehicle
. Constraint (12) ensures that every charging event
will be matched with at most one vehicle
. Constraint (13) ensures that every vehicle
will start and end its shift at the same depot. Constraint (14) ensures that if an arc
that terminates at a service node or charging event is used by a vehicle
, then the opposite arc
will be declared as being used by the same vehicle
k. Similarly, if an arc
of the same type is not being used by a vehicle, then the opposite arc
will be declared as not being used. Constraint (15) ensures that task start time at a node
, for a vehicle
, will start inside the corresponding time window
. Constraint (16) ensures that the variables
take on binary values.
Constraints (17) up to (21) are the linearized form of the following constraints:
These constraints ensure that a vehicle will have arrived at the starting location of the node before time , at which the task at node j begins.
Constraints (22) and (23) ensure that the vehicle will arrive at the start location of the node , before the upper time limit of the time window for the start of the task at node j.
The following constraints manage the vehicle battery
variations and perform the charging scheduling:
Constraint (
27) defines the charging rate of a vehicle
, during a charging event
. Constraint (28) ensures that a vehicle
leaves its depot/departs from its source node
fully charged. Constraint (29) defines the
variation of a vehicle
, when it performs a task at a node
. Constraint (30) defines the
variation of a vehicle
, when it performs a trip at a service node
. Constraint (31) defines the
variation of a vehicle
, when it recharges during a charging event
. Constraint (32) ensures that the
of a vehicle
remains above its minimum allowed
level
throughout the duration of its shift. Constraints (33) up to (36) are the linearized form of the following constraint:
These constraints define the SoC variation of a vehicle , when it transits through an arc .
The following constraints involve the reduction in conflicting arcs:
Let and be two adjacent arcs of the polygraph G. It is assumed that these arcs are in conflict if or or . These arcs are removed with the valid inequalities described in the constraints (38)–(40).
4. Numerical Experiments
In the numerical experiments, we present the results of the implementation of our model. We are considering four scheduling cases with respect to the timetable of the examined network. The start and end node locations for every case examined are distributed on a km grid. Every scheduling case consists of 10 service trips on random lines, two charging stations, and two vehicles . Four charging events correspond to every charger, with the charging events in total being defined as such: . In our code formulation, identifiers , etc., represent the charging nodes. We implemented this coding logic to separate the charging nodes from other tasks, such as service trips V or the source and sink nodes . As mentioned, in every examined case, there are two available charging stations. Hence, the identifiers of the charging nodes that end with the digit 1 correspond to the first charger, and those that end with the digit 2 correspond to the second charger. Moreover, it should be stated that in all the scheduling cases examined in this problem, all buses start their service at a source node, fully charged with their battery at its maximum capacity. A source node (start depot) corresponds to each vehicle , as well as a sink node (end depot) .
The start location coordinates of the nodes are identical to the end location coordinates. Additionally, every vehicle at the end of its shift returns to the same depot from where it started its shift. Thus, the source node
of a vehicle
has the same coordinates as its sink node
. Moreover, the upper arrival time limit
at the sink node
of a vehicle
k is always greater than the upper departure time limit
from the source node
of the same vehicle
k, as it is not possible for a vehicle to have returned to its depot without it having started its shift. Furthermore, the lower departure time limit
from the source node
of the vehicle
k and its corresponding lower arrival time limit
at the sink node
have values of zero. This occurs since there is the possibility of the vehicle
k not needing to be deployed for service and thus remaining in its depot for the whole duration of the examined scheduling case. Consequently, there is the requirement for a virtual concurrent departure from and arrival to the depot of the vehicle k, at time
. The values of the node formulation described above for the source and sink nodes are presented in
Table 3.
For every service node , the upper task start time limit is 400 min greater than the lower task start time limit . For the travel time distribution parameters and , publicly available GTFS (general transit feed specification) data from the public transport operator of Krakow (ZTP) are used.
The values of the node formulation described above for the source and sink nodes, the travel time distribution parameters
and
, and the upper and lower charging event starting time limits
and
, are presented in
Table 4 and
Table 5 below.
For every scheduling case, the following values are considered:
Unit vehicle dwell cost units/min.
SoC of vehicle k when fully charged energy units.
Minimum allowed SoC level of vehicle k: energy units.
Unit travel cost = 10 cost units/km.
Charging station charging rate r = 10 energy units/min.
Unit energy consumption rate = 1.3 units/min.
As mentioned in the previous section, scenarios of travel times are defined for each service trip . The outcomes are constructed with the following process: for every service trip , a sample of size is created that follows the normal distribution, with a mean value of and a standard deviation of . For each outcome of the above sample, Euler’s number is raised to the power of the corresponding value of the sample. The travel times of the service trip are defined as the result of this computation. The energy consumption during the service trip is defined as the product of the unit energy consumption rate multiplied by the length of the Euclidean distance between the start and end locations of the relevant service node. The energy consumption between the end location of the node and the start location of the node , is also defined as the product of the unit energy consumption rate multiplied by the length of the Euclidean distance between the locations mentioned above.
Furthermore, each of the four scheduling cases is evaluated with three different methods:
with |S| = 1 travel time scenario using the mean values of the travel times (deterministic approach).
with |S| = 100 travel time scenarios.
with |S| = 100 travel time scenarios and the chance constraint, where a = 80%.
In all cases, the model variants are solved with the commercial solver software Gurobi 11.0.0, implemented in Python 3. The computer on which the evaluations were performed is equipped with 16 GB of RAM, an Intel Core i5-1135G7 CPU with four cores, eight threads, and clock speeds ranging from 3.9 to 4.1 GHz during the execution of the relevant programs.
One can notice that the scheduling cases that are evaluated with multiple travel time outcomes result in schedules with higher operational costs. This is to be expected, as stochastic travel times contain extreme cases. Consequently, to accommodate these extreme cases, the schedules need to contain large time buffers in the operational schedules of electric buses, increasing operational costs. As shown in
Figure 3, for the schedules where all constraints are respected, operational costs are increased between 49% and 75%. In the schedules where the chance constraint is introduced, and it is accepted that for 20% of the worst time travel outcomes there may be a delay or cancellation of a service at a node, the increase in operational costs is less severe (between 20% and 33%).
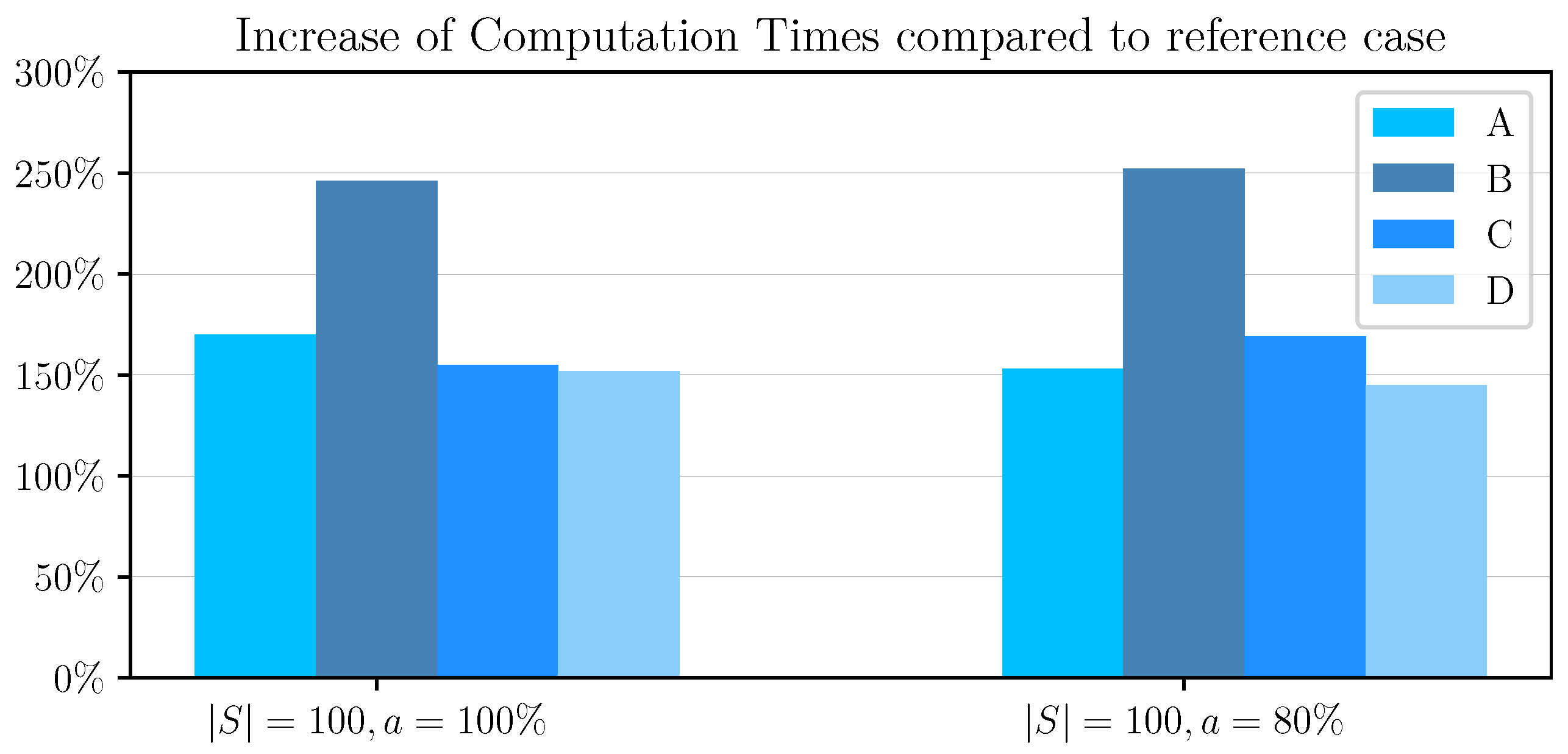
As presented in
Table 7, when solving the stochastic optimization problem considering
travel time outcomes, computation times are approximately 150 to 250 times greater than the corresponding computation times for solving the deterministic model (
). The use of the chance constraint does not significantly change the computation times compared to the case of not using the chance constraint, as we can also observe in
Figure 4.
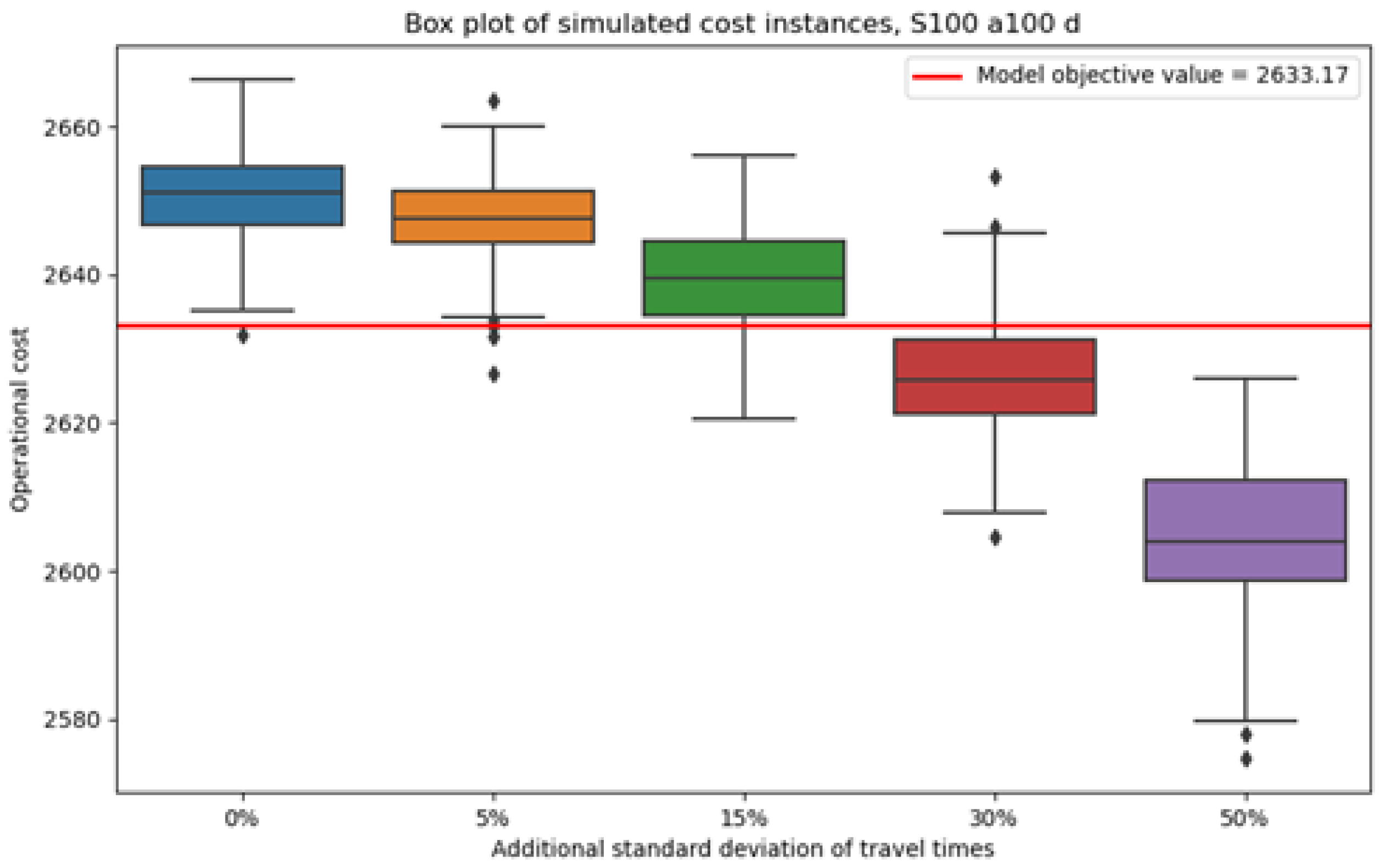
Sensitivity Analysis Based on the Variation in Travel Time Standard Deviation
The aim of this subsection is to investigate the variation in the operational costs of a schedule resulting from a scheduling case as the standard deviation of travel times
changes. Thus, Monte Carlo simulations are performed according to the following equation:
In more detail, for every schedule that was constructed considering stochastic travel times, 200 simulations are computed for a 0%, 5%, 15%, 30%, and 50% increase in the standard deviation of the natural logarithms of the service travel times.
In each simulation, 100 travel time outcomes are computed for each service node. The mean values of the normal distribution of the natural logarithms of the travel times are equal to those of the numerical experiment, while the standard deviations receive their respective increase. The seed value is random for each simulation. The values of the parameters , , are identical to those of the numerical experiment, while for the parameters , and , the values of the corresponding decision variables are used from the evaluation results of the relevant schedule.
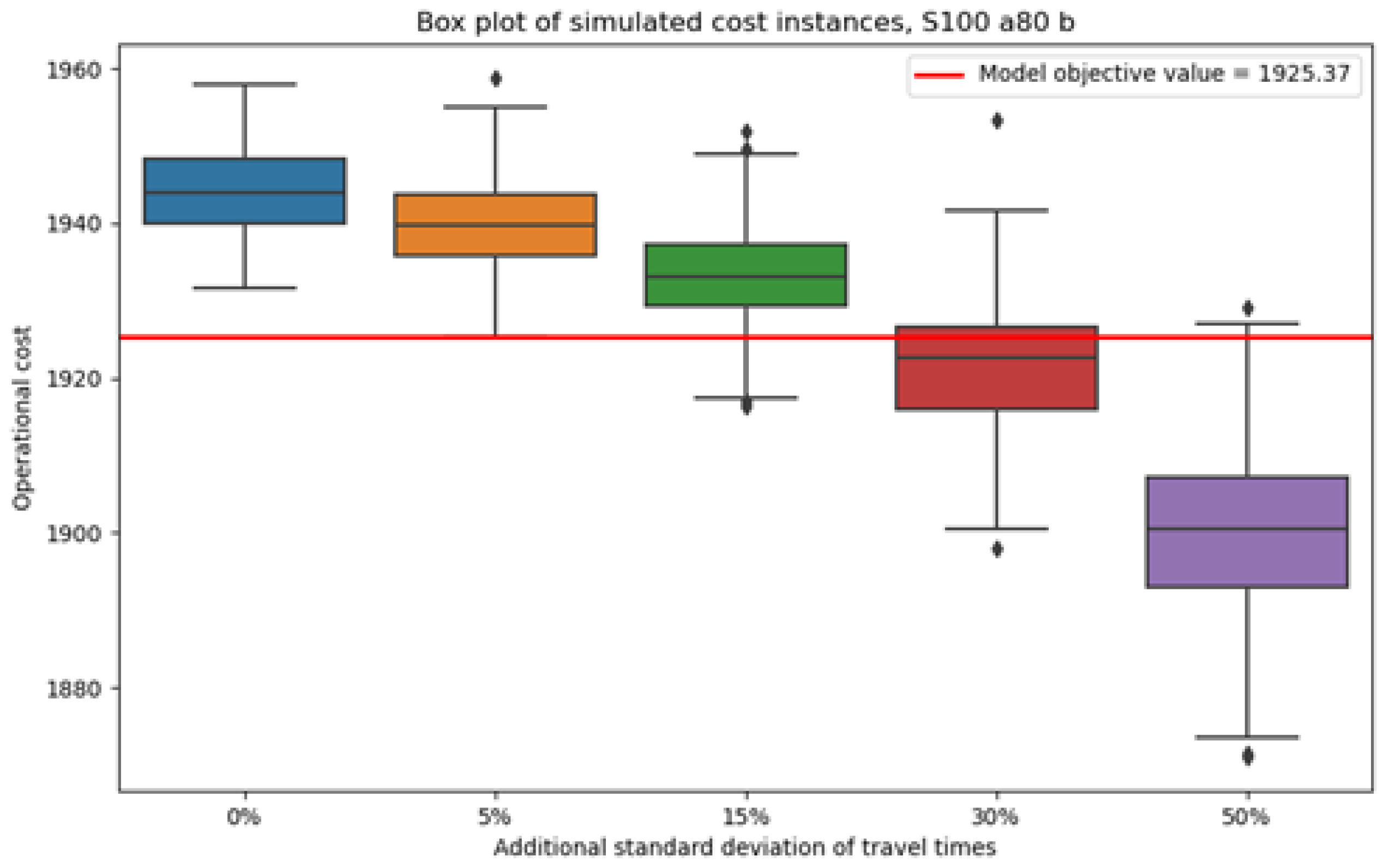
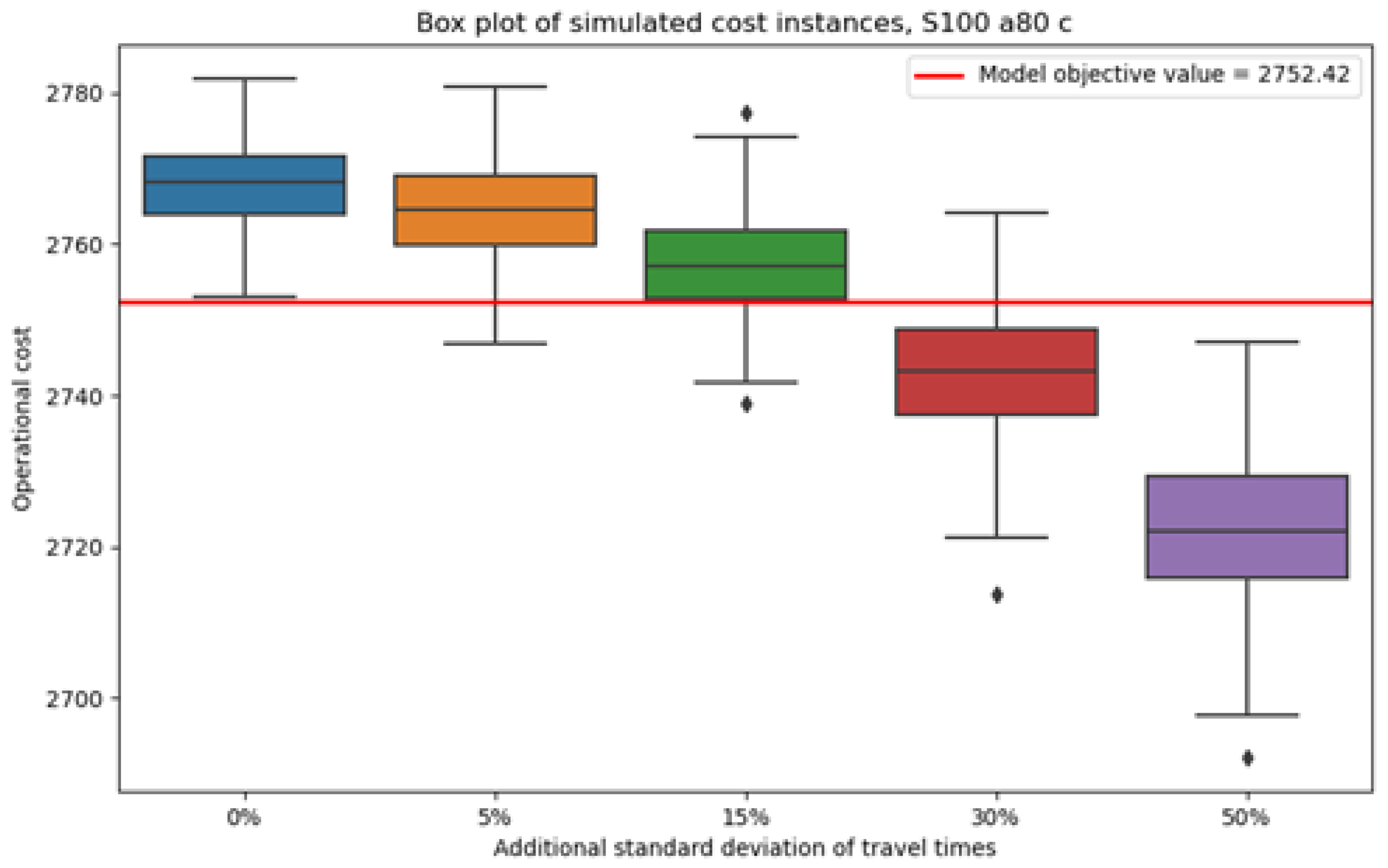
The box plots of the operational costs simulations are presented below in
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11 and
Figure 12. In each case, the box is defined as the inter-quartile range (IQR) of the corresponding sample, while the whiskers extend to the values that have a
IQR difference from the median. The median is shown as a black line that intersects the box and the outlier values are shown as diamond-shaped points.
According to the above results, for a certain schedule, if the increase in the standard deviation of the natural logarithms of the service travel times is less than 15%, then the change in operational costs is negligible. That is because the change in the median operational costs is around 10 cost units, which in all cases amounts to a change of less than 1%. However, the median operational costs do decrease exponentially as the standard deviation of service travel times increases; thus, for changes greater than 15%, the variations in operational costs stop being negligible. However, for an increase in the standard deviation performed in the present analysis, the change in the median operational costs remains small. In all cases, the standard deviation of the simulated operational costs does not vary considerably, and the inter-quartile ranges do not increase significantly as the standard deviation of the service travel time increases. Lastly, the simulated operational costs remain relatively similar to the operational costs that result from the evaluation of the numerical experiments.
5. Conclusions
The battery electric bus scheduling problem is complex, with many factors that must be taken into consideration. The most critical ones are the limited energy capacity of batteries and the time that is required to charge them. Additionally, there are matters such as passenger demand, road traffic uncertainties, and possible variations in energy costs during the day, which further complicate scheduling decisions.
This paper provides a MILP model with the goal of minimizing operational costs while considering time windows, multiple depots, and multiple charging stations, along with charging events. These time windows are available for charging the buses from the start of the operating time of the examined network, enabling us to explore the entire solution space to find the globally optimal solution without excluding any possible optimal results. Furthermore, valid inequalities are utilized for the reduction in the solution space. We assume stochastic travel times that follow the log-normal distribution. The aim of this is to construct schedules that provide transit operators with a service resilient to extreme conditions at a reasonable operational cost. If, however, a transit operator prefers reduced coverage in extreme events—without a total disregard for them—in exchange for a reduction in cost, then the variant of the model with the chance constraint can satisfy that demand. The chance constraint is formulated in a linear form, such that the model can be evaluated with a commercial solver.
The two variants of the model and the reference paper model are evaluated with indicative synthetic scheduling scenarios of 10 trips each. The variant of the model without the chance constraint produces schedules with operational costs to higher than the case where stochastic travel times are not considered. However, the variant of the model with the chance constraint and a probability value of (which means that there is a probability of that a trip starts with no delays) produces schedules with only to higher operational costs. At this point, it should be mentioned that the solution time for 100 outcomes for each trip travel time increases by approximately 150 to 250 times for both variants of the model compared to the reference model. Both variants of the model are sensitive to variations in travel times’ standard deviation, but the values of the mean operational costs do not vary significantly for reasonable variations in the travel times’ standard deviation. Indeed, the inclusion of travel time stochasticity in scheduling considerations increases operational costs. However, this method of scheduling reveals operational costs that are closer to the ones in real-life situations for transit operators that aim to achieve a high level of service, meaning smooth operation during unfavorable scheduling conditions. For transit operators that are more sensitive to operational costs but desire a level of coverage in unfavorable scheduling conditions, the variant of the model with the chance constraint provides a higher level of flexibility.
Electrical vehicle battery deterioration is a phenomenon that should be considered during the scheduling procedure and should affect the planning strategy for the implementation of electric buses in the public network. The developed model presented above strives to minimize the operational costs while taking into consideration the limitations of the energy level of the vehicles. In the case of electric vehicle battery deterioration, which arises after some years of the operation of the bus, the model would assign the bus for charging more often while also trying to minimize the itineraries required for charging. Certainly, after some years of battery deterioration, the operational cost would be increased, but again, it would be the minimum possible.
Considering the benefits for the users, the developed model—which handles the uncertainty regarding the travel times of the buses—could offer a more robust timetable for the examined network. Consequentially, the punctuality of the itineraries would be improved and the waiting time variation for the passengers would be decreased. This could also affect how trustworthy (reliable) passengers consider the bus network to be and would encourage them to use public transport more, hopefully leading to an environmentally friendly solution for this form of transportation.
In future research, our approach can also be applied to larger networks, examining its scalability and potential computational limits of the model.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}