1. Introduction
Human working memory can handle a limited amount of information when executing simultaneous tasks [
1]. This is the basic assumption implied in the concept of cognitive load (CL), which refers to the mental resources used to manage a behavioral plan [
2]. There are a number of types of CL such as intrinsic, extraneous, and germane [
3]. Intrinsic CL results from the complexity of the learning task and depends on the number of sources of information, so that a higher complexity increases CL. Extraneous CL is linked to the way the task is presented and to possible external confounders, such as distractions, noise, and instructional design. The easier the task is to understand the lower the CL becomes. Germane CL, on the other hand, reflects the cognitive effort invested in processing, understanding, and integrating new information. However, in recent perspectives [
4,
5], intrinsic and germane dimensions may be merged; therefore, intrinsic and extraneous should be considered as the most relevant components of CL [
6].
Each activity that we complete in life demands a certain number of cognitive resources, which means CL is always experienced in daily life activities in various quantities. Activities of personal autonomy can be challenging for some populations, like older people, as they are usually dual-task and therefore produce more CL [
7], which can hinder their health and reduce life expectancy [
8]. Maintaining independence is crucial for overall health, as the loss of independence is associated with numerous chronic conditions [
9], cognitive decline [
10], and general disability [
11]. Supporting vulnerable individuals thus represents one of the most pressing health challenges in promoting a positive quality of life [
12]. With this in mind, there is strong interest in human–robot collaborations [
13] as a potential tool to help the management of daily activities to maintain an individual’s independence [
14].
Several systematic reviews, meta-analyses, and empirical studies have been conducted demonstrating that using robotics can support daily activities and, therefore, independence. For instance, Socially Assistive Robotics (SAR) can be utilized to support learning by increasing cognitive and affective outcomes, while achieving results similar to those of human tutoring [
15]. They have also been utilized successfully in the treatment of Autism Spectrum Disorder by recognizing and responding to human social cues with structured rehabilitative behaviors [
16]. SAR have also been reported to support the reduction in symptoms of depression by providing companionship and health-monitoring robots [
17]. Robots have been also used to assess cognitive functions through robotic psychometric assessments administered interactively [
18], to increase mobility in infants thanks to play-based, child–robot interactions [
19], and to rehabilitate after a stroke with personalized robotic exercise coaching [
20]. Finally, social anxiety has been reduced by using artificial agents for symptom management, social skills development, and improvement in overall quality of life in a cognitive-behavioral framework [
21]. However, new healthcare technologies, while beneficial, have not been evaluated considering the role of CL, which can be either increased by the effort of using an additional tool, or reduced thanks to an actual supportive interaction.
Indeed, these technologies can significantly impact the CL of users as they often require processing multiple streams of information simultaneously, which can be challenging especially for those experiencing possible cognitive declines or frailty. Increased CL from complex interfaces can lead to stress and anxiety, potentially hindering the effective use of such technologies. For instance, systematic reviews revealed that the effective use of such tools with older adults with chronic diseases, like cognitive impairment, must consider at least five domains: demographic and socioeconomic, health-related, dispositional, technology-related, and social. Among the health-related factors, cognitive limitations due to aging are included, while technology-related factors deal with the ergonomics of interfaces [
22]. Such factors impact directly on the intention to use new devices, either promoting or penalizing their integration in daily life, so they need to be carefully analyzed [
23]. Therefore, the implementation of user-friendly, intuitive interfaces is crucial to enhance the usability and adoption of healthcare technologies. In this context, SAR have been increasingly studied to simplify tasks [
24]. However, most of the research in this area has focused on collaborative robots (i.e., co-bots) in work settings [
25], leaving a gap in understanding the use of technology for aiding in everyday life in a CL framework. After careful analysis of the literature, indeed, within the CL framework artificial agents were studied only as professional aids, for instance in surgery [
26], industry [
27], and construction [
28]. Most of these contributions were either proof-of-concept or exploratory, and did not compare different measures and support conditions. Personal autonomy in daily life for vulnerable populations, finally, was not the main final goal.
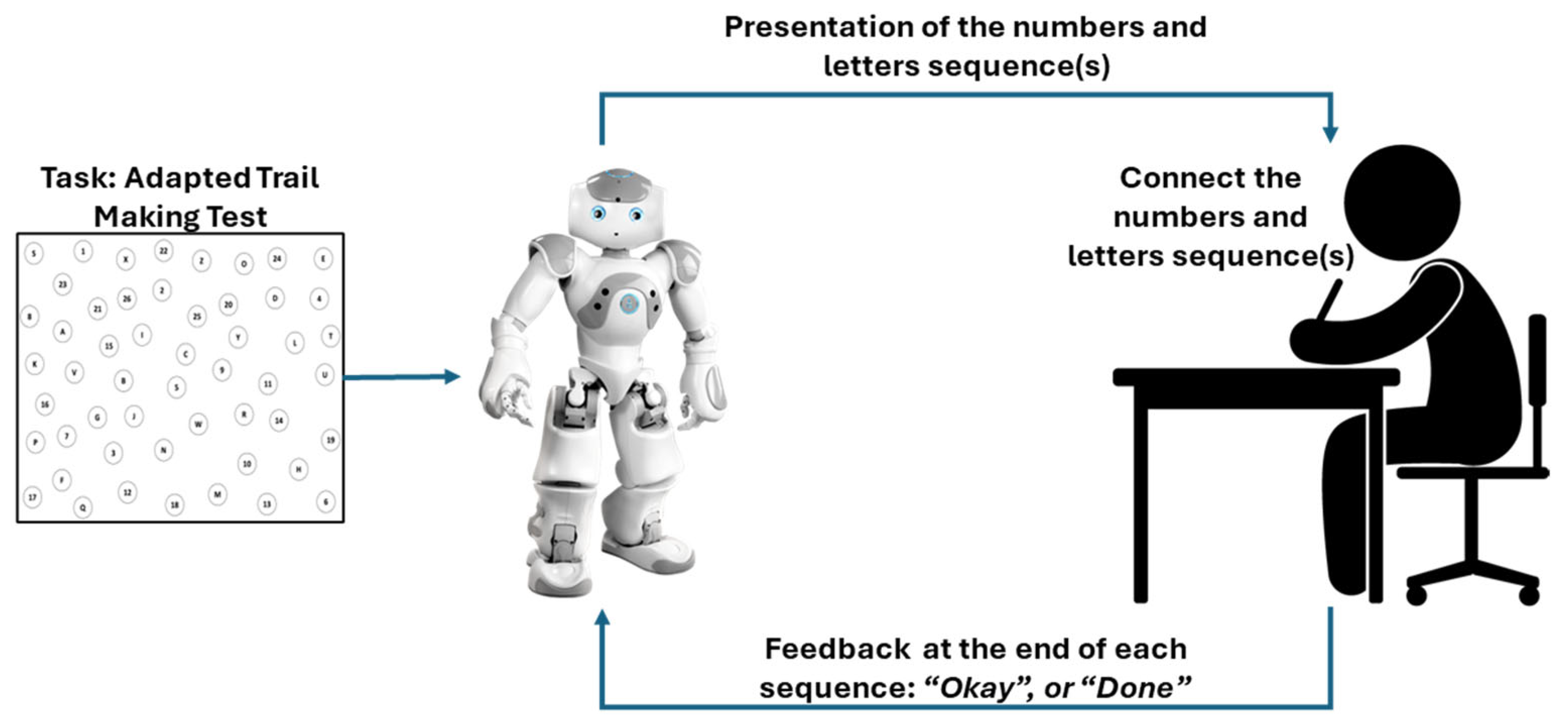
Therefore, we conducted the current study with adults to preliminarily verify whether and how a supportive human–robot interaction (HRI) could impact on the performance and the perceived effort due a complex activity, while the same cognitive skills required for daily autonomy were increasingly elicited. Specifically, participants completed a cognitive task at three different levels of CL, while supported by a SAR (
Figure 1). Number of errors, time of completion, and perceived fatigue were measured for rating the performance and the effectiveness of support. As an important addition, we also included a baseline where the task was executed without the support of SAR. Our overall goal was to understand under which conditions an external robotic support could be helpful for outcome improvement and mental demand management, hypothesizing that SAR are beneficial when compared to not assisted tasks, but only when user’s cognitive features are taken into account for a tailored interaction. Therefore, considering the lack of studies involving SAR in a similar framework, we explored how this technology can help independent living, and how this support impacts objective and subjective measures of CL.
3. Results
Means (M) and standard deviations (SD) of errors, time, and PCL across the four conditions are displayed in
Table 1.
The task condition had a significant effect on participants’ performance (F(3, 123) = 251.06, p < 0.001, = 0.86), their time to complete the task (F(3, 123) = 36.11, p < 0.001, = 0.47), and their perceived cognitive load (F(3, 123) = 63.03, p < 0.001, = 0.61). While sex did not emerge as a significant covariate, age was found to be a significant covariate for each independent variable (F(1, 39) = 17.35, p < 0.001, = 0.31; F(1, 39) = 21.62, p < 0.001, = 0.36; F(1, 39) = 4.09, p = 0.04, = 0.10, respectively).
Post hoc analysis indicated that participants showed a decrease in performance with an increase in difficulty level. Results indicated significant differences between the low and medium levels (Mdif = −8.76, SE = 0.77, t(123) = −11.29, p < 0.001), the medium and high levels (Mdif = −9.50, SE = 0.77, t(123) = −12.24, p < 0.001), and the low and high levels (Mdif = −18.26, SE = 0.77, t(123) = −23.53, p < 0.001). No difference was found between the baseline and low level of cognitive load (Mdif = 0.07, SE = 0.77, t(123) = 0.092, p = 0.99).
Time to complete the task showed a significant reduction across conditions, except between the low and medium levels. Post hoc analysis indicated a significant difference between the baseline and low level (Mdif = 51.8, SE = 16.2, t(123) = 3.19, p = 0.009), no difference between the low and medium levels (Mdif = 5.9, SE = 16.2, t(123) = 0.36, p = 0.98), and a significant decrease between the low and high levels (Mdif = 106.6, SE = 16.2, t(123) = 6.56, p < 0.001).
Interestingly, participants reported a significant decrease in PCL between the baseline condition and the low level of the task (Mdif = 7.66, SE = 2.2, t(123) = 3.48, p = 0.003). However, the opposite was found for the medium level, which had a significantly higher PCL compared to baseline (Mdif = −12.03, SE = 2.2, t(123) = −5.46, p < 0.001) and the low level (Mdif = −19.69, SE = 2.2, t(123) = −8.95, p < 0.001). This increase in PCL further escalated at the high level, as indicated by the significant increase between the medium and high levels (Mdif = −8.07, SE = 2.2, t(123) = −3.66, p = 0.002).
Please refer to
Figure 5 for the estimated means and standard errors.
4. Discussion
To the best of our knowledge, this was the first study to examine the impact of social robot-provided interactive support at different levels of cognitive load with a baseline condition in which the task was completed without interactive assistance. This comparison enabled us to establish a benchmark for understanding the actual impact of the support provided. Furthermore, as previously mentioned, this was the first comprehensive study to examine the role of a social robot in reducing CL in the context of independent living.
According to our results, when the task was completed alone there was no significant difference in performance (i.e., number of errors) compared to the robotic support at low CL. This similar accuracy, however, was achieved at the cost of increased execution time in the baseline. Indeed, in that condition the participant had to retrieve the information on correct pairs from the semantic memory, significantly slowing the completion of the task. This phenomenon is well documented in the CL literature, as demanding activities lead to a worse time performance, fatigue and possibly to compromised outcomes [
32].
The effective help provided by the SAR was confirmed also by the decrease in perceived cognitive load between baseline and the low CL robot condition of the study. This could be due to two main factors. First, the SAR relieved the participant from the effort of retrieving information from the semantic memory. In an ecological scenario of daily life, a robotic support could remind the user of unfinished tasks or forgotten memories, so that the human would not need to strive to either to remember or keep in mind useful data. Second, the interaction with the robot, which gave the instructions only when the user said “Okay” or “Done”, probably allowed a more effective management of the task itself. Dividing a complex procedure into smaller chunks and increasing the learner’s perception of control on the whole process, indeed, reduces CL [
33]. This means that the multimodal interaction with a SAR could be a means to rationalize tasks and promote a reduction in perceived effort.
However, our results showed also that CL interfered with task performance even when supported by SAR. This effect was evident through both objective measures (number of errors) and subjective assessments (perceived mental demand). Indeed, as CL increased, accuracy declined across conditions, cognitive effort rose, and execution time decreased. This last evidence is particularly important. While the reduction in time from the baseline to the SAR condition under low CL was accompanied by maintained accuracy and lower perceived cognitive load—indicating more efficient task management—the subsequent apparent speed of execution was linked to poorer performance and greater effort. This suggests that participants developed what in experimental psychology is called “learned helplessness”, where individuals cease attempting to resolve a difficult situation due to repeated failure and a perceived lack of control [
34]. In our case, participants prematurely ended the task by saying “Okay” to the robot without completing the pairing, as the effort became overwhelming and information could not be retained.
The increase in CL at higher difficulty levels with robotic support is a crucial finding in our study. This result is particularly significant given that potential confounding variables were accounted for to minimize their impact. For example, all participants had no prior interaction with social robots and demonstrated normal cognitive functioning. Therefore, although SAR can support daily activities [
35], our study indicated that SARs are effective in aiding tasks only when interactions are tailored to consider the user’s cognitive effort. Indeed, excessive CL nullifies any advantage provided by such support. This is particularly important given that research has shown that older adults, for example, experience greater cognitive load than younger adults when performing tasks that require significant mental effort, highlighting the need for tailored interventions to effectively support certain populations [
36].
Indeed, all partial eta squared values exceeded 0.14, indicating that a substantial proportion of the total variance in the dependent variables was explained by the independent variable. This demonstrates that the level of CL and its management has a practical and significant impact on parameters such as performance, time, and fatigue. The pursuit of effective support strategies represents a real challenge in daily life, rather than being merely a statistical observation.
These findings open research directions. It is important to identify which aspects of human–robot interaction affect CL, so that SAR can be implemented effectively. Additionally, it is crucial to understand how to design artificial agents to measure the cognitive effort of users in real-time. According to our results, this goal could be reached by developing systems that track the number of errors and amount of time during a task of a given difficulty. It would allow for the adjustment of HRI parameters, reducing stress and improving performance. This approach would promote a person-centered strategy in assistive robotics that considers psychological variables.
Indeed, even if SAR have been demonstrated to be effective tools to screen and promote users’ health conditions and quality of life, it is still the human interactor who must understand, learn, and adapt to the artificial agents’ HRI features. For this reason, SAR is often a limited strategy for actual support, as it lacks flexibility and personalization. Specific characteristics, therefore, are more an obstacle rather than a valuable source of information. For an autonomous system supporting independent living, it is essential to consider human needs and preferences dynamically. Recent studies moved towards that direction, for instance by creating real-time multimodal human–robot collaboration with gestures and speech [
37].
Despite the interesting findings, this study has some limitations, such as the small sample size, the use of one robotic model only, the lack of a comparison with human–human interaction, and the absence of biological markers of cognitive load that could have corroborated the subjective perception of participants. The concept of “learned helplessness”, even if scientifically convincing in this context, would need a qualitative exploration for being confirmed. In addition, our study should be extended to other younger and older participants, as our findings indicated age as a significant covariate, and the sample seemed skewed towards middle-aged adults. Therefore, results could not be generalized well to young and elderly subjects. However, even if these aspects were relevant, the use of a baseline offered an important benchmark to draw useful results on the role played by SAR.
Author Contributions
Conceptualization, D.M., A.D.N., J.H. and S.C.; methodology, S.V. and D.M.; software, S.V.; formal analysis, R.V.; data curation, S.V.; writing—original draft preparation, S.V., R.V. and N.C.; writing—review and editing, J.H., S.C., A.D.N. and D.M.; supervision, D.M. and S.C.; funding acquisition, D.M. and A.D.N. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the EPSRC and NIHR funds (grant number EP/W031809/1, IMACTIVE).
Institutional Review Board Statement
The study was conducted in accordance with the Declaration of Helsinki and approved by the Ethics Committee of Nottingham Trent University (protocol code 729 and date of approval 1 March 2024).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in this study are available on request from the corresponding author due to privacy reasons.
Acknowledgments
The authors would like to thank all the participants who took part in the study.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Kiese-Himmel, C. Working Memory—An Overview. Sprache Stimme Gehor 2020, 44, 107–115. [Google Scholar] [CrossRef]
- Ghanbari, S.; Haghani, F.; Barekatain, M.; Jamali, A. A Systematized Review of Cognitive Load Theory in Health Sciences Education and a Perspective from Cognitive Neuroscience. J. Educ. Health Promot. 2020, 9, 176. [Google Scholar]
- Sweller, J.; van Merriënboer, J.J.G.; Paas, F. Cognitive Architecture and Instructional Design: 20 Years Later. Educ. Psychol. Rev. 2019, 31, 261–292. [Google Scholar]
- Choi, H.H.; van Merriënboer, J.J.G.; Paas, F. Effects of the Physical Environment on Cognitive Load and Learning: Towards a New Model of Cognitive Load. Educ. Psychol. Rev. 2014, 26, 225–244. [Google Scholar]
- Kalyuga, S. Cognitive Load Theory: How Many Types of Load Does It Really Need? Educ. Psychol. Rev. 2011, 23, 1–19. [Google Scholar] [CrossRef]
- Korbach, A.; Brünken, R.; Park, B. Differentiating Different Types of Cognitive Load: A Comparison of Different Measures. Educ. Psychol. Rev. 2018, 30, 503–529. [Google Scholar] [CrossRef]
- MacPherson, M.K. Cognitive Load Affects Speech Motor Performance Differently in Older and Younger Adults. J. Speech Lang. Hear. Res. 2019, 62, 1258–1277. [Google Scholar] [CrossRef]
- Baltes, M.M.; Silverberg, S.B. The Dynamics Between Dependency and Autonomy: Illustrations Across the Life Span. In Life-Span Development and Behavior; Lawrence Erlbaum Associates, Inc.: Mahwah, NJ, USA, 2019. [Google Scholar]
- Hedman, M.; Pöder, U.; Mamhidir, A.G.; Nilsson, A.; Kristofferzon, M.L.; Häggström, E. Life Memories and the Ability to Act: The Meaning of Autonomy and Participation for Older People When Living with Chronic Illness. Scand. J. Caring Sci. 2015, 29, 824–833. [Google Scholar] [CrossRef]
- Rosoff, A.J.; Gottlieb, G.L. Preserving Personal Autonomy for the Elderly Competency Guardianship and Alzheimers Disease. J. Leg. Med. 1987, 8, 1–47. [Google Scholar] [CrossRef]
- Alonso-Sardón, M.; Iglesias-De-Sena, H.; Fernández-Martín, L.C.; Mirón-Canelo, J.A. Do Health and Social Support and Personal Autonomy Have an Influence on the Health-Related Quality of Life of Individuals with Intellectual Disability? BMC Health Serv. Res. 2019, 19, 63. [Google Scholar] [CrossRef]
- Heide, S.K. Autonomy, Identity and Health: Defining Quality of Life in Older Age. J. Med. Ethics 2022, 48, 353–356. [Google Scholar] [CrossRef] [PubMed]
- Vagnetti, R.; Camp, N.; Story, M.; Ait-Belaid, K.; Mitra, S.; Zecca, M.; Di Nuovo, A.; Magistro, D. Instruments for Measuring Psychological Dimensions in Human-Robot Interaction: Systematic Review of Psychometric Properties. J. Med. Internet Res. 2024, 26, e55597. [Google Scholar] [CrossRef] [PubMed]
- Vagnetti, R.; Camp, N.; Story, M.; Ait-Belaid, K.; Mitra, S.; Fowler Davis, S.; Meese, H.; Zecca, M.; Di Nuovo, A.; Magistro, D. Social Robots and Sensors for Enhanced Aging at Home: Mixed Methods Study with a Focus on Mobility and Socioeconomic Factors. JMIR Aging 2024, 7, e63092. [Google Scholar] [CrossRef] [PubMed]
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social Robots for Education: A Review. Sci. Robot. 2018, 3, eaat5954. [Google Scholar]
- Scassellati, B. How Social Robots Will Help Us to Diagnose, Treat, and Understand Autism. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2007; pp. 552–563. ISBN 9783540481102. [Google Scholar]
- Chen, S.C.; Jones, C.; Moyle, W. Social Robots for Depression in Older Adults: A Systematic Review. J. Nurs. Scholarsh. 2018, 50, 612–622. [Google Scholar] [CrossRef]
- Varrasi, S.; Di Nuovo, S.; Conti, D.; Di Nuovo, A. Social Robots as Psychometric Tools for Cognitive Assessment: A Pilot Test. In Human Friendly Robotics. Springer Proceedings in Advanced Robotics; Ficuciello, F., Ruggiero, F., Finzi, A., Eds.; Springer: Cham, Switzerland, 2019; Volume 7, pp. 99–112. [Google Scholar]
- Kokkoni, E.; Mavroudi, E.; Zehfroosh, A.; Galloway, J.C.; Vidal, R.; Heinz, J.; Tanner, H.G. GEARing Smart Environments for Pediatric Motor Rehabilitation. J. Neuroeng. Rehabil. 2020, 17, 16. [Google Scholar] [CrossRef]
- Hun Lee, M.; Siewiorek, D.P.; Smailagic, A.; Bernardino, A.; Bermúdez i Badia, S. Design, Development, and Evaluation of an Interactive Personalized Social Robot to Monitor and Coach Post-Stroke Rehabilitation Exercises. User Model. User-Adapt Interact. 2023, 33, 545–569. [Google Scholar] [CrossRef]
- Rasouli, S.; Gupta, G.; Nilsen, E.; Dautenhahn, K. Potential Applications of Social Robots in Robot-Assisted Interventions for Social Anxiety. Int. J. Soc. Robot. 2022, 14, 1–32. [Google Scholar]
- Bertolazzi, A.; Quaglia, V.; Bongelli, R. Barriers and Facilitators to Health Technology Adoption by Older Adults with Chronic Diseases: An Integrative Systematic Review. BMC Public Health 2024, 24, 506. [Google Scholar] [CrossRef]
- Schroeder, T.; Dodds, L.; Georgiou, A.; Gewald, H.; Siette, J. Older Adults and New Technology: Mapping Review of the Factors Associated With Older Adults’ Intention to Adopt Digital Technologies. JMIR Aging 2023, 6, e44564. [Google Scholar] [CrossRef]
- Johnson, D.O.; Cuijpers, R.H.; Juola, J.F.; Torta, E.; Simonov, M.; Frisiello, A.; Bazzani, M.; Yan, W.; Weber, C.; Wermter, S.; et al. Socially Assistive Robots: A Comprehensive Approach to Extending Independent Living. Int. J. Soc. Robot. 2014, 6, 195–211. [Google Scholar] [CrossRef]
- Fournier, É.; Kilgus, D.; Landry, A.; Hmedan, B.; Pellier, D.; Fiorino, H.; Jeoffrion, C. The Impacts of Human-Cobot Collaboration on Perceived Cognitive Load and Usability during an Industrial Task: An Exploratory Experiment. IISE Trans. Occup. Ergon. Hum. Factors 2022, 10, 83–90. [Google Scholar] [CrossRef] [PubMed]
- Sexton, K.; Johnson, A.; Gotsch, A.; Hussein, A.A.; Cavuoto, L.; Guru, K.A. Anticipation, Teamwork and Cognitive Load: Chasing Efficiency during Robot-Assisted Surgery. BMJ Qual. Saf. 2018, 27, 148–154. [Google Scholar] [CrossRef] [PubMed]
- Rajavenkatanarayanan, A.; Nambiappan, H.R.; Kyrarini, M.; Makedon, F. Towards a Real-Time Cognitive Load Assessment System for Industrial Human-Robot Cooperation. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 698–705. [Google Scholar]
- Liu, Y.; Habibnezhad, M.; Jebelli, H. Brainwave-Driven Human-Robot Collaboration in Construction. Autom. Constr. 2021, 124, 103556. [Google Scholar] [CrossRef]
- Bowie, C.R.; Harvey, P.D. Administration and Interpretation of the Trail Making Test. Nat. Protoc. 2006, 1, 2277–2281. [Google Scholar] [CrossRef]
- Hart, S.G. NASA-Task Load Index (NASA-TLX); 20 Years Later. In Proceedings of the Human Factors and Ergonomics Society, San Fransisco, CA, USA, 16–20 October 2006. [Google Scholar]
- Devos, H.; Gustafson, K.; Ahmadnezhad, P.; Liao, K.; Mahnken, J.D.; Brooks, W.M.; Burns, J.M. Psychometric Properties of NASA-TLX and Index of Cognitive Activity as Measures of Cognitive Workload in Older Adults. Brain Sci. 2020, 10, 994. [Google Scholar] [CrossRef]
- Camp, N.; Vagnetti, R.; Bisele, M.; Felton, P.; Hunter, K.; Magistro, D. The Effect of Cognitive Task Complexity on Healthy Gait in the Walking Corsi Test. Brain Sci. 2023, 13, 1019. [Google Scholar] [CrossRef]
- Hasler, B.S.; Kersten, B.; Sweller, J. Learner Control, Cognitive Load and Instructional Animation. Appl. Cogn. Psychol. 2007, 21, 713–729. [Google Scholar] [CrossRef]
- Maier, S.F.; Seligman, M.E. Learned Helplessness: Theory and Evidence. J. Exp. Psychol. Gen. 1976, 105, 3–46. [Google Scholar] [CrossRef]
- Bemelmans, R.; Gelderblom, G.J.; Jonker, P.; de Witte, L. Socially Assistive Robots in Elderly Care: A Systematic Review into Effects and Effectiveness. J. Am. Med. Dir. Assoc. 2012, 13, 114–120.e1. [Google Scholar]
- Brustio, P.R.; Magistro, D.; Zecca, M.; Rabaglietti, E.; Liubicich, M.E. Age-Related Decrements in Dual-Task Performance: Comparison of Different Mobility and Cognitive Tasks. A Cross Sectional Study. PLoS ONE 2017, 12, e0181698. [Google Scholar] [CrossRef]
- Chen, H.; Leu, M.C.; Yin, Z. Real-Time Multi-Modal Human–Robot Collaboration Using Gestures and Speech. J. Manuf. Sci. Eng. 2022, 144, 101007. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}