1. Introduction
The rapid development of pLEO constellations, composed of small satellites, has revolutionized communications and navigation services [
1,
2,
3]. The global coverage afforded by these innovative pLEO constellations opens up unparalleled opportunities for alternative positioning, navigation, and timing (AltPNT) solutions that can reshape our technological landscape.
Navigation services utilizing one-way time-of-flight with GNSS hinge upon the meticulous monitoring of stable clocks that send out ranging signals. Each satellite houses multiple highly stable microwave clocks, all integrated into a robust timekeeping system. Managing the performance of these satellite clocks and synchronizing them with laboratory-based standards is crucial for creating an accurate time scale. This synchronization allows for reliable tracking of GNSS signals from ground reference stations worldwide. Furthermore, essential corrections are made for each satellite clock to ensure alignment with the reference time scale that is distributed to users [
4,
5,
6].
However, it is essential to recognize that the principles underpinning GNSS are not easily applicable to LEO spacecraft, which operate with shorter lifetimes. GNSS depends on large, heavy atomic clocks, which are continuously monitored by a global network of ground stations to enable precise positioning and timing. These ground stations also upload clock corrections to maintain user accuracy. Unfortunately, managing the onboard clocks for a LEO constellation places a substantial burden on the ground network. Effectively providing global navigation services from LEO necessitates comprehensive coordination and operational oversight.
To truly tackle the challenges of achieving global coverage with dedicated networks for precise positioning, such a ground infrastructure must deploy over 100 stations worldwide and add several hundred more in specific regions to ensure optimal real-time performance. This ambitious objective demands a thorough reevaluation of the foundational elements of GNSS time scales to unlock the potential for enhanced navigation and positioning capabilities in the modern era.
Recent advancements, as noted in [
7], indicate that a hybrid architecture that combines the Galileo constellation of Medium Earth Orbiting (MEO) satellites with a small constellation of LEO satellites—augmented by selected optical inter-satellite links (ISLs)—has the potential to greatly diminish our dependence on terrestrial infrastructure. This innovative approach allows for direct synchronization among satellites, thereby eliminating the need for MEO satellites to carry onboard clocks. Furthermore, as demonstrated in [
8], a comprehensive series of simulations used the Galileo constellation as a benchmark, progressively adding features like LEO satellites, ISLs, and synchronized clocks. The goal was to assess how these enhancements impact orbit signal-in-space errors and essential geodetic quality Earth parameters such as polar coordinates, the length of the day, and geo-center coordinates.
However, a significant challenge remains: the limited supply of space-qualified clocks that meet GNSS-level performance standards. Currently, only a handful of U.S. suppliers can manufacture about five of these clocks per year. Additionally, today’s GNSS-quality space clocks tend to be bulky, heavy, and power-consuming. This combination of size, weight, and power (SWaP) requirements creates obstacles when deploying smaller systems in proliferated LEO constellations.
For addressing the pressing need for GNSS-quality clocks in proliferated constellations, one promising approach is to develop an ensemble of clocks onboard a single space vehicle. This vehicle could then disseminate accurate time to other satellites based on its performance and holdover capabilities. Alternatively, a constellation-wide ensemble could be formed, which distributes precise time to other assets as needed. This strategy not only optimizes resources but also enhances the feasibility of implementing advanced satellite systems.
In the second challenge, it was observed that monitoring each onboard clock across a pLEO constellation creates a bottleneck for resilient GNSS performance. Therefore, finding an alternative solution to establish a precise timing ensemble across the constellation is essential. This ensemble must maintain accurate timing for operational users while ensuring traceability to UTC (Coordinated Universal Time). Achieving GNSS timing accuracy without relying solely on GNSS itself is a primary objective of recent initiatives.
To address this, two-way time and frequency transfers between pLEO platforms are implemented, enabling the use of low Size, Weight, and Power (SWaP) clocks without a heavy dependence on extensive ground monitoring or GNSS availability. This approach is critical for maximizing the existing connectivity among these cooperating platforms, which are currently utilized in various primary data transport applications [
9,
10].
As anticipated, the radio frequency antennas and terminals on each pLEO platform will support both in-plane and cross-plane connections [
11]. Importantly, establishing networks with inter-satellite links to connect different pLEO platforms allows for data transport, ranging measurements, and clock comparisons. Leveraging these inter-satellite links enables clock comparisons among small atomic clocks onboard each pLEO satellite, potentially reducing the need for ground monitoring. This feature allows differential clock phase measurements to be directly integrated into clock ensembling algorithms. Such capabilities are vital for the on-demand generation of the local realizations of pLEO time (pLEOT), which functions as a constellation time scale similar to GPST (GPS Time).
This article introduces a novel conformance framework essential for facilitating seamless interactions and realizing composable and reference time scales within a distributed architecture. This architecture enables the direct synchronization of pLEO satellite transmissions. Synchronization is achieved by measuring time offsets using two-way signaling, propagating differential clock measurements to all pLEO satellites, computing the clock offsets within a common reference frame, and accurately correcting these offsets during signal generation.
The structure of the article is as follows:
Section 2 examines how principles of control engineering can address the key question of how each participating pLEO platform can effectively manage ad hoc clock data transfer requests. This is accomplished by enhancing decision-making autonomy and increasing the reprogrammability of integrated broadcasting signals to ensure their integrity, robustness, and security.
Section 3 presents the concept of a pLEO time scale, detailing its critical clock dynamics and frequency standards for various types of low SWaP clocks. The objective is to establish an autonomous and robust pLEO time scale, which can serve as primary clock reference signals if needed. This section discusses a networked clock system comprising a limited number of free-running clocks onboard cooperating pLEO platforms, which are interconnected through clock-to-clock difference measurements. These measurements are coordinated via multi-way time transfer and synchronization.
Section 4 demonstrates that implicit ensemble mean (IEM) estimation is crucial for creating a “paper clock” that operates on an anchor platform within the pLEO constellation. Each corrected clock in the pLEO constellation can accurately represent the IEM.
Section 5 indicates that synchronizing satellites within the pLEO constellation with the pLEOT requires a real clock onboard each platform. This physical clock must be adjusted against the paper clock to achieve a composite clock. Therefore, maintaining network update rates along with distributed IEM information is essential for steering commands while minimizing reliance on IEM realizations.
Section 6 introduces a novel clock steering technique based on MCV control theory. This approach aims to improve the understanding of stochastic control for achieving autonomous realizations of the IEM time scale onboard each platform, thereby enhancing performance and robustness in the face of stochastic clock anomalies. Finally,
Section 7 offers concluding remarks and reflections on the findings discussed throughout the article.
3. pLEO Time Scale Development
The following insights may have been previously detailed in [
13]. The success of pLEOT hinges on establishing an accurate, robust, and stable time scale. Once this foundational time scale is in place, all local clocks within the pLEO constellation will be synchronized to it, known as pLEOT.
In established GNSS like GPS, ground monitoring networks meticulously determine correction values for each satellite clock in relation to the system time, such as GPST or UTC. These timing offsets are then uploaded to the satellite constellation and broadcast to terrestrial users through navigation messages. It is important to note that an anomaly in any single satellite clock can adversely affect the performance for all terrestrial users. Consequently, ensuring robust and reliable timing on each satellite is absolutely essential.
For the pLEO constellation, where a stable onboard timing reference is not readily available, the stability of onboard timing can be significantly improved by utilizing a clock ensemble technique that leverages the strengths of various clocks. Different clock types excel with distinct averaging intervals. Furthermore, integrating multiple clock types into a mixed ensemble not only enhances the stability of the time scale but also strengthens its resilience, as all clocks of the same type provide vital active redundancies. This approach underscores the commitment to delivering reliable and precise timing solutions for the future.
The stability of an ensemble clock is fundamentally characterized by the Overlapping Allan Deviation (OADEV) [
14]. By employing a finite set of phase measurement data [
15], one can accurately estimate the OADEV, which is critical for selecting various diffusion coefficients that reflect the covariance matrix of the process noise. These coefficients are essential as they encompass diverse fundamental noise types, including white frequency noise, random walk frequency noise, etc. Ultimately, a reduction in the diffusion coefficients of an individual clock indicates superior performance, leading to more precise predictions.
Moreover, the integration of different clock types within a mixed ensemble through a Kalman filter approach is not only feasible but also highly advantageous [
16]. This method allows for the creation of a time scale that capitalizes on the unique strengths of each clock, resulting in a composite clock solution that consistently outperforms the best clock in the ensemble [
17,
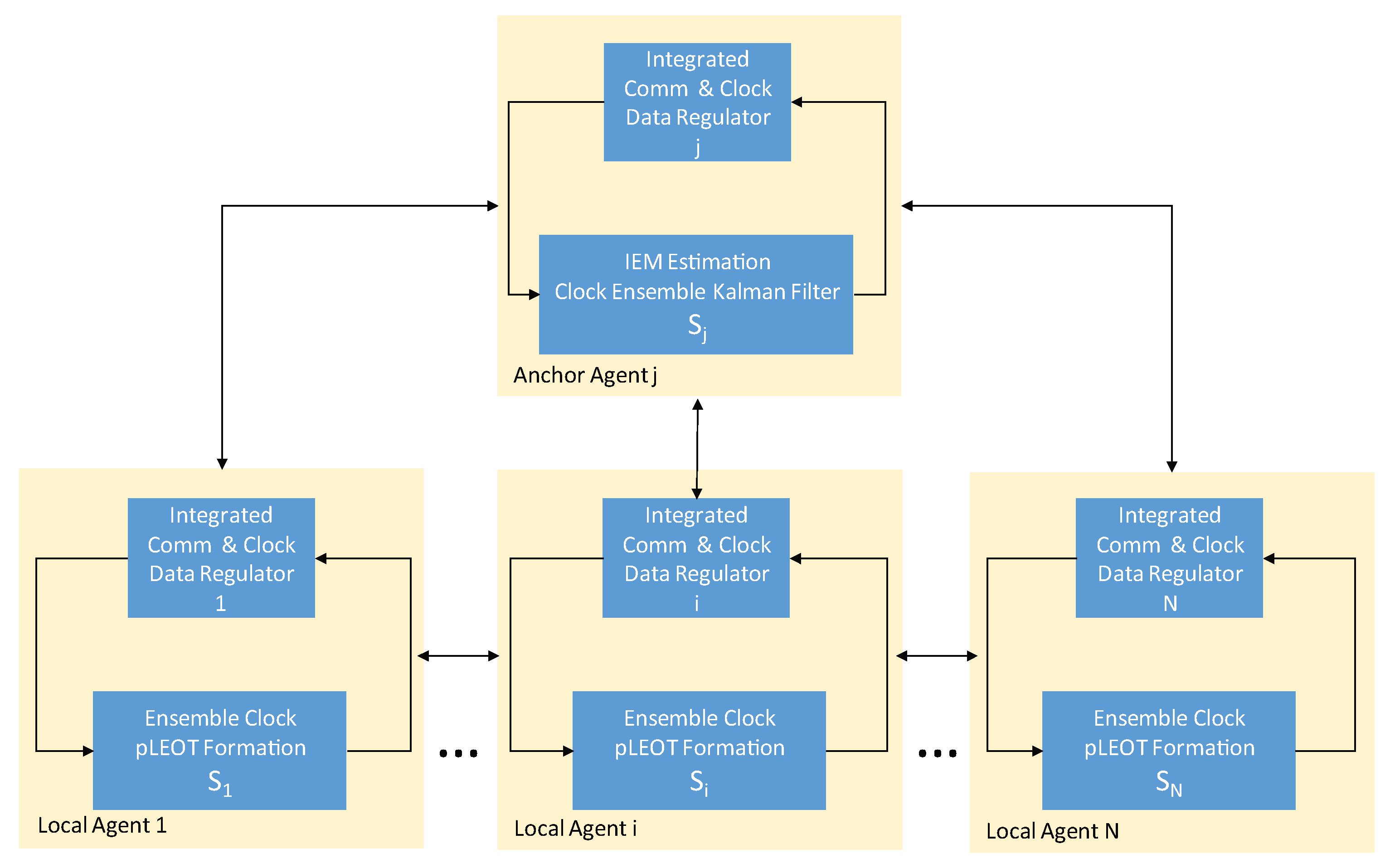
18]. As illustrated in
Figure 5, an operational architecture is proposed for a pLEOT time scale, applicable to any pLEO constellation. This innovative design maximizes the potential of all participating platforms, existing satellite communications, and inter-satellite measurements, paving the way for effective onboard implementations of pLEOT. Each platform can operate with its local low-noise oscillator, complemented by a numerically controlled oscillator signal synthesis, ensuring exceptional performance and accuracy.
3.3. Inter-Platform Measurements Enabled by High-Precision Time Synchronization
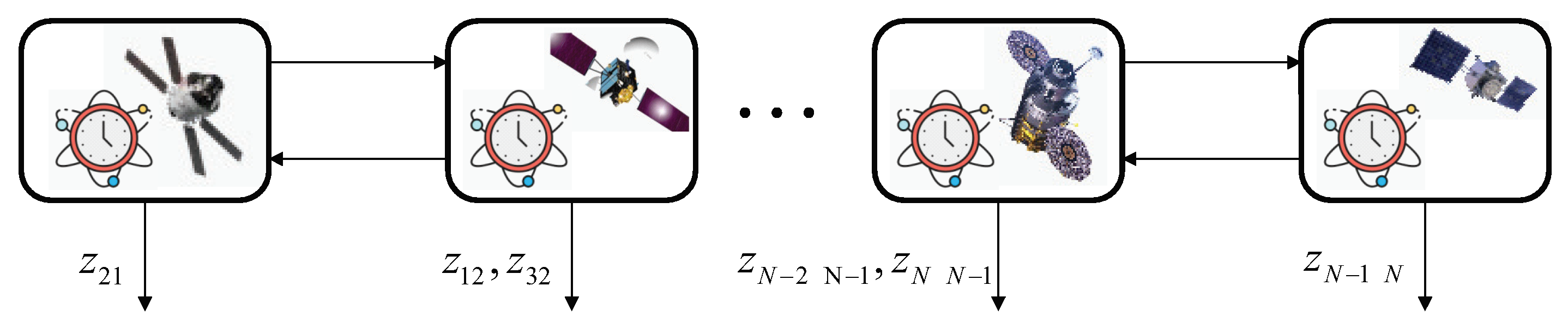
In the framework of the clock ensemble principle with measurements, one begins by comparing the orbiting clocks to one of the ensemble clocks using precise clock-to-clock difference measurements. As illustrated in
Figure 6, these measurements are centered on understanding the differences between the initial states of two ensemble clocks. These crucial measurements are activated by events linked to the holdover performance of the physical clocks. They are subsequently processed through a Kalman filter, complemented by a covariance reduction extension to effectively address the unobservability challenge presented by a system of
N independent clocks. It is essential to recognize that, in reality, only
of these clocks can be independently observed from the measurements obtained.
When implementing a clock ensemble, the inputs to the clock-ensemble Kalman filter are clock-to-clock difference measurements from each bi-directional radio link. For instance, differential phase measurements output from each platform between onboard
ith and
jth clocks are given by
where
is a zero-mean Gaussian measurement noise with its covariance adjusted for the behavior of the difference between clocks
i and
j.
Understanding the complexities of clock measurements is essential as they are significantly influenced by platform dynamics and relativistic effects. A prime example of this is the Sagnac effect, which describes the phase shift that can occur between two measurements taken in opposite directions along the same closed path [
20]. In pLEO scenarios, accurately synchronizing time across different platforms requires accounting for the Sagnac effect to ensure precise differential phase measurements.
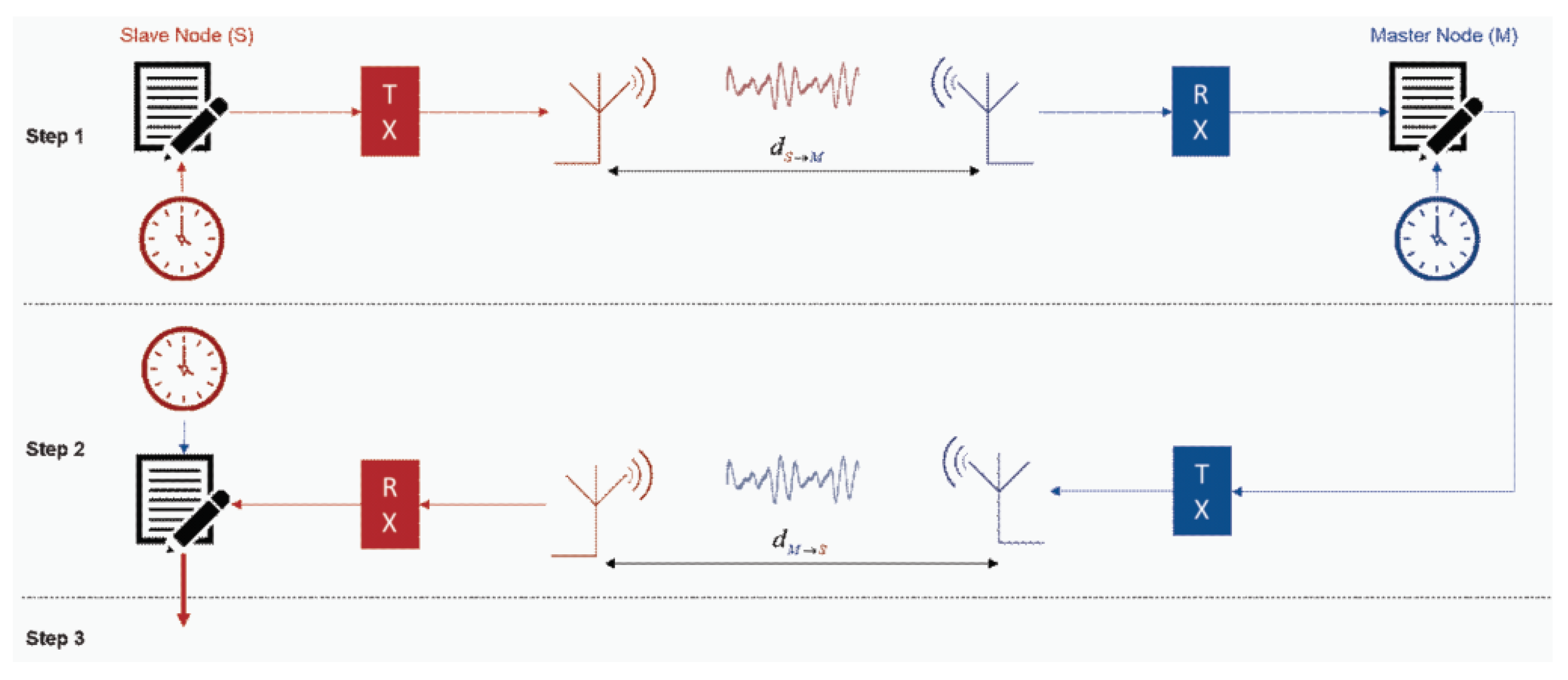
The research presented in [
21] introduces an Enhanced Multi-Way Time Transfer (EM-WaTT) solution, which is specifically designed to address the challenges associated with dynamic time coordination. This approach is particularly important when inter-satellite link delays are not uniform across different platforms. As shown in
Figure 7, the EM-WaTT method consists of three strategic steps, assuming that the secondary platform, identified as platform
j, and the primary platform, referred to as platform
i, can exchange timing information through wireless inter-platform communications. By implementing this innovative solution, greater accuracy in time synchronization across various platforms can be achieved.
Step 1. The secondary platform, j, launches its time synchronization protocol by sending a message included with the transmit time stamp, to the primary node, i. Upon receiving the message, the primary platform, i, will add the receive timestamp, on the primary clock to the message.
Step 2. The primary platform, i, immediately sends the updated message back to the secondary platform, j, which adds the receive time stamp, on the secondary clock to the received message.
Step 3. The secondary platform,
j, will then perform the clock adjustment based on the updated message, i.e.,
where in this context,
and
represent the distances between the secondary and primary platforms at the time of transmission, respectively. The terms
and
refer to the transmit and receive processing times of the secondary platform
j. Similarly,
and
indicate the processing times to receive and transmit from the primary platform
i. In practical applications, these processing times are fixed based on local signal processing clocks with a limited number of clock cycles. Finally, the speed of the radio wave is represented by the speed of light, denoted as
c.
Thus, the clock adjustment,
, at the secondary platform,
j, is
where
and
are the relative position and velocity vectors of the secondary platform,
j, concerning the primary platform,
i, which are operated under the dot product of two vectors.
5. Networked Control Systems with Minimal Attention
As highlighted in the previous section, the clock-ensemble Kalman filter operates on a discrete time interval of seconds. Every seconds, the clock-to-clock difference data between the onboard OCXO platform i and the IEM is recorded and transmitted to all participating platforms i (where ). The onboard steering control value is then calculated and applied to the MPS as soon as the user-defined control interval is achieved.
In this framework, reducing bandwidth is essential, particularly by leveraging existing inter-satellite radio links in the fully connected pLEO constellation. This method facilitates the efficient transfer of clock estimates from the clock-ensemble Kalman filter on the anchor platform j to all other participating platforms. This research critically examines how diminishing the number of data packet exchanges, represented as , between the remote sensor (the clock-ensemble Kalman filter on the anchor platform j) and the steering controller or actuator linked to the local IEM realization on platform i, can enhance overall performance.
The local IEM realization aboard orbital platform
i applies its model knowledge in its steering controller or actuator to effectively approximate the OCXO’s behavior concerning the IEM, particularly during intervals when clock estimates from the remote sensor are not available. The core goal is to ensure feedback by updating the state
of the local IEM model, as governed by Equation (
77), using the actual state
of the ensemble clock
i. This crucial state information comes from the remote sensor, which is the clock-ensemble Kalman filter operating on anchor orbital platform
j.
which, in accordance with (
73), leads to
During the remainder of the control interval, the steering action relies on the local IEM realization model onboard orbital platform i. The dynamics of this local IEM model are integrated into the steering controller or actuator, resulting in an open-loop operation for a duration of h seconds.
This research presents an initial step toward developing onboard timing architectures in AltPNT. The analysis explores the trade-off between open-loop and closed-loop steering controls, which could facilitate local pLEOT formation across a pLEO constellation, thereby offering potential resilient navigation services. Interestingly, networked control systems have proven to be invaluable for designing control systems that manage steering frequency standards with minimal oversight and resource allocation.
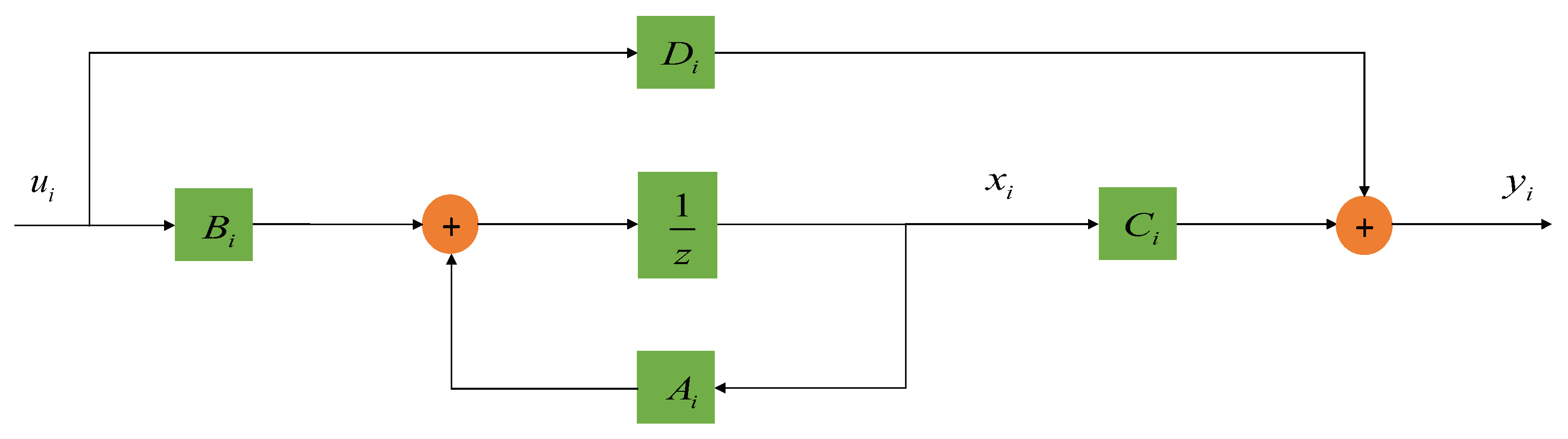
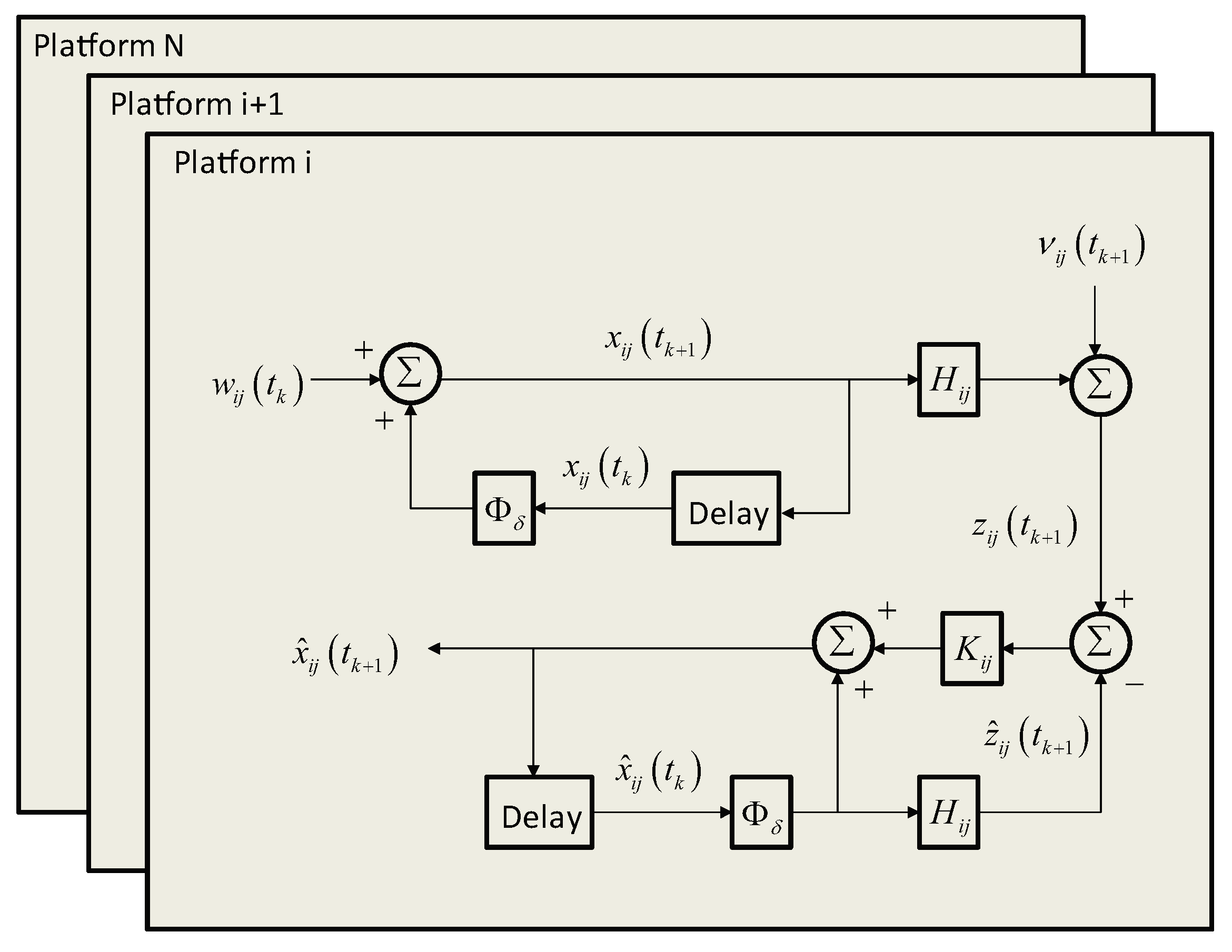
Consider a feedback networked control system in
Figure 10, where the actual behavior of the IEM estimate is described by
where
and the update time
with
for all
k.
Also, the local IEM realization model is given by
As shown in
Figure 10, the remote sensor onboard platform
j has the full state,
available. It will send the state information through the inter-satellite radio links every
h seconds.
Finally, the onboard controller,
for clock steering by
where one further observes that the gain matrix,
affects how quickly the signal transitions from the free-running behavior of the local OCXO clock to the IEM estimate.
The state error,
is defined as
The following analysis is motivated by the work [
25]. For each index
i where
, the state error
represents the difference between the OCXO state and the IEM. The modeling error matrices,
and
, indicate the difference between the actual clock of the ensemble member and its corresponding remote IEM realization model.
It is important to note that the local IEM realization model for each index
i is updated every
h seconds, which means that
for
. This resetting of the state error at each update interval is a crucial feature of the networked control platforms discussed here. Furthermore, it can be demonstrated that the dynamics of the local IEM realization system for index
i in the time interval
can be described by
where
Moreover, the discrete state-feedback system (
86) is globally exponentially stable around the solution
if and only if the eigenvalues of
are inside the unit circle. The essential implication of results (
89) and (
90) relates to the necessary and sufficient conditions for the stability of system (
86). This outcome specifies the maximum transfer time or the minimum frequency for updating the state in the remote steering controller, denoted as
i, associated with the separate orbital platform
i, where
. Specifically, it establishes an upper bound for
h, referred to as the update time for its local reference time scale, pLEOT
i, which is aligned with the global IEM time scale operating on the anchor orbital platform
j.
6. Onboard Steering Commands via Minimal-Cost-Variance Control
Each pLEO platform is presumably working to generate its own local IEM realization for pLEOT. To achieve this, each platform will adjust its local reference clock, such as an autonomous robust time scale defined by , in relation to the IEM estimation. Alongside the controller update rate, denoted as h, there is an additional tuning parameter called the controller gain, . This gain is used to adjust the corresponding OCXO signal response to match the IEM estimate.
In general, a larger controller gain is expected to produce larger frequency corrections for any given offset of the OCXO from the IEM estimate, leading to a more accurate realization of the IEM. To optimize this responsiveness, the elements of the controller gain, , which dictate how effectively the autonomous remote time scale system operates on platform i, are designed.
Recall that the discrete-time state-space counterpart of a local IEM realization model (
83) that is completely controllable is governed by
where the states of the steering control system (
91) include the phase and frequency of the steered OCXO clock onboard orbital platform
i. The steering commands, denoted as
, are sent to an actuator such as an MPS device. The output signals or measurements typically consist of the phase deviation
between the local OCXO oscillator and the IEM estimation. The controller
operates on the actuator to minimize the phase deviation
. Noise parameters associated with both the OCXO and IEM clocks are determined based on measured Allan deviation curves. The realization of these noises is represented by a zero-mean Gaussian process noise
, with its covariance matrix given by
.
Moreover, one of several requirements can be established for clock steering on each platform in relation to the IEM estimation. For instance, the performance indicator suggests a convex cost function for selecting a steering policy. This insight can be represented by a quadratic cost function, based on the idea that the relative penalties assigned to phase and frequency deviations, as well as steering efforts concerning a local reference clock
i, can be optimized over a finite horizon,
, for all time
k. To be credible, these penalties must be responsive to the clock steering operations aimed at reducing phase and frequency deviations toward zero
where the weighting coefficients associated with the steering efforts,
and the phase and frequency deviations,
are positive and bounded. In general, if
is large compared to
, the penalty is large for the controller and/or actuator attempting to drive both phase and frequency deviations toward zero to rapidly. On the other hand, if
is large compared to
, the controller faces a small penalty for a large steering effort, and the system is driven toward zero more quickly.
The risk management perspective of clock steering operations emphasizes the importance of effective risk handling. It specifically focuses on the feedback steering mechanism that shapes the probability distribution function of the chi-squared random variable referenced in Equation (
94). This approach is crucial for ensuring the robustness and reliability of steering operations.
The author has delved into various cost-cumulant control strategies, introducing a risk-value aware performance index defined as a linear manifold composed of a finite set of centralized moments linked to the performance measure affected by a chi-squared random variable. These innovative control strategies provide a transparent framework for effectively allocating performance robustness and reliability requirements across diverse qualitative performance attributes and their corresponding risks, ensuring enhanced decision-making and risk management.
Indeed, the effectiveness of cost-cumulant control algorithms was demonstrated in various applications, such as cable-stayed bridges [
26], structures affected by wind [
27], and buildings subjected to earthquake vibrations [
28]. The results from these implementations were compared to those obtained using Linear-Quadratic-Gaussian (LQG) control, which focuses on minimizing the statistical average of (
94). The findings revealed that the cost-cumulant controllers significantly outperformed the results achieved with LQG control.
In light of recent advancements and the growing efficiency of edge computing onboard each orbital platform
i, it is both prudent and beneficial to reassess a notable member of the cost-cumulant control family: the minimal-cost-variance (MCV) control. This innovative approach prioritizes the reduction of cost variance while ensuring the cost mean remains within established limits [
29]. The MCV control technique is particularly relevant in addressing the escalating concerns surrounding clock steering operations, which play a vital role in maintaining precision and reliability in local reference time scales across diverse orbital platforms. Embracing this technique could significantly enhance the operational frameworks and outcomes.
A highly effective strategy for designers is to set rigorous metrological requirements that enable the clock to be adjusted just once, eliminating the need for repeated actions. This operational requirement for clock adjustment makes the MCV control paradigm an ideal choice for implementing changes to the clock and time scale. By adopting this framework, designers can focus on minimizing the variance of the performance measure, as highlighted in (
94), while ensuring that the expected value of that performance measure remains within specified constraints. This approach not only enhances precision but also streamlines efficiency in time management.
As a guide for the reader, this section serves as an important signpost related to the theory of MCV control. It lays the foundation for designing new steering control laws that can achieve the objectives for autonomous, resilient, and remote timing systems. This is accomplished by influencing the probability distribution of the performance measure to accurately estimate IEM parameters in desirable ways. Specifically, the focus on minimizing the variance of
while keeping its mean within a defined constraint is relevant to the current context
is minimized, while
where
denotes the conditional expectation operator and the actual data
measured from local frequency standards onboard separate orbital platforms with
and
.
The primary focus of
involves practical considerations, such as the desired response, acceptable deviations from that response, and the complexity of the clock steering controller. How should we move forward based on this general assessment? It becomes evident that the choice of
is not entirely arbitrary. It must be selected in a way that ensures it is always greater than the following lower bound, i.e.,
At this moment, it may be shown that for the special class of the linear-quadratic problem, the mean value constraint is intuitively given by
where
and
is a symmetric and nonnegative matrix. Moreover, both
and
should be selected such that
where
is as given by (
97).
Notably, a recursion equation for the optimal variance cost involves the standard procedure for this type of problem. First, the constraint equation is combined with the expression to be minimized using a Lagrange multiplier,
. The resulting equation is then incorporated into a broader class of problems where
is treated as a variable rather than a fixed initial time. Solving this more general problem leads straightforwardly to the solution of the specific problem at hand. Therefore, the goal is to determine
, and the clock steering policy should take the form
, for
, e.g.,
is minimized, In this context, let
represent a Lagrange multiplier. The four pre-multiplying
values have been introduced for convenience. It is important to note that
encompasses all the information necessary for clock and time scale adjustments at time
k. The chosen form for
, along with the requirement for boundedness, contributes to defining the class of admissible steering controls.
Before proceeding with the development of the recursion equation, however, let
,
, and let
where
signifies “variance cost”.
To prevent mathematical details from overshadowing the concepts being analyzed, some steps leading to the recursion equation for the variance cost have been referenced in [
29]. At this point, the assumption of linear control laws naturally leads to optimal quadratic costs. In other words, when using linear control laws, it is always possible to express the costs in this way
where
and
are symmetric and nonnegative real-valued matrices and whereas
. Thus, for
, it follows that
Aside from the relevance of
for
, to the terminal conditions given by
,
,
, and
, some mathematical manipulations further yield
Performing the minimization with respect to
for the
i-th clock steering, the optimal minimal-cost-variance controller
for clock and time scale adjustments are given by
where, for
,
and
Using the MCV controller (
105) for clock and time scale adjustments and performing the minimization in terms of
, the mean constraint is obtained as follows
and the variance is obtained as follows
where
and
.
Currently, concerns regarding the control solution and its ability to explain the minimum nature of the expected value of a finite-time horizon quadratic cost—similar to the minimum mean cost control—have taken a back seat in the investigation of new clock steering methods presented here. The primary focus has shifted to the minimum variance cost problem. For each selection of within the range , solving the recursion equations leads to a mean value of the performance measure, along with its corresponding minimum variance and optimal control law.
A key objective is to determine effective values of , , to validate several sets of expected values, minimum variances, and optimal steering laws. In contemporary terms, it can be asserted that the minimum mean problem is a specific instance of the problem addressed here; it represents the solution to the recursion equations in the limit as approaches infinity, for .
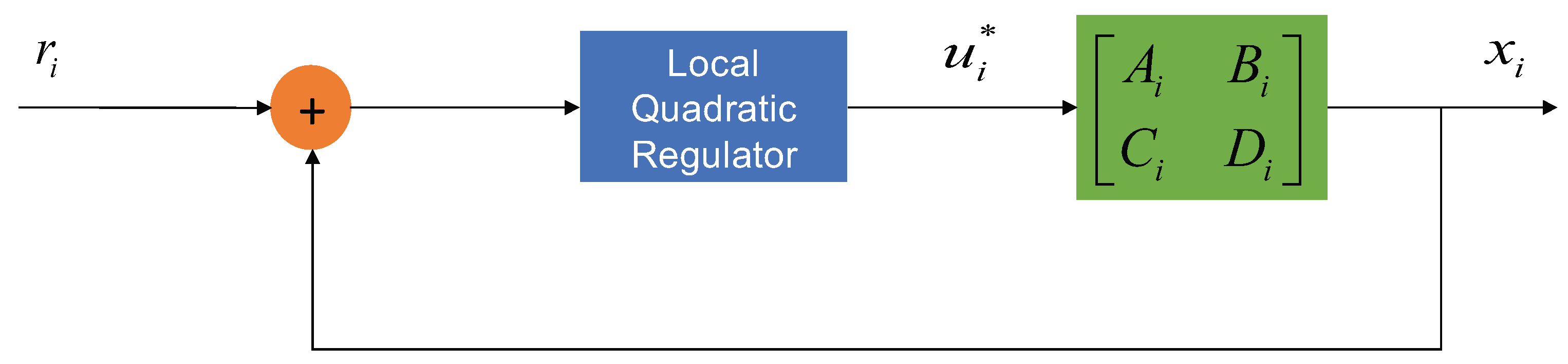
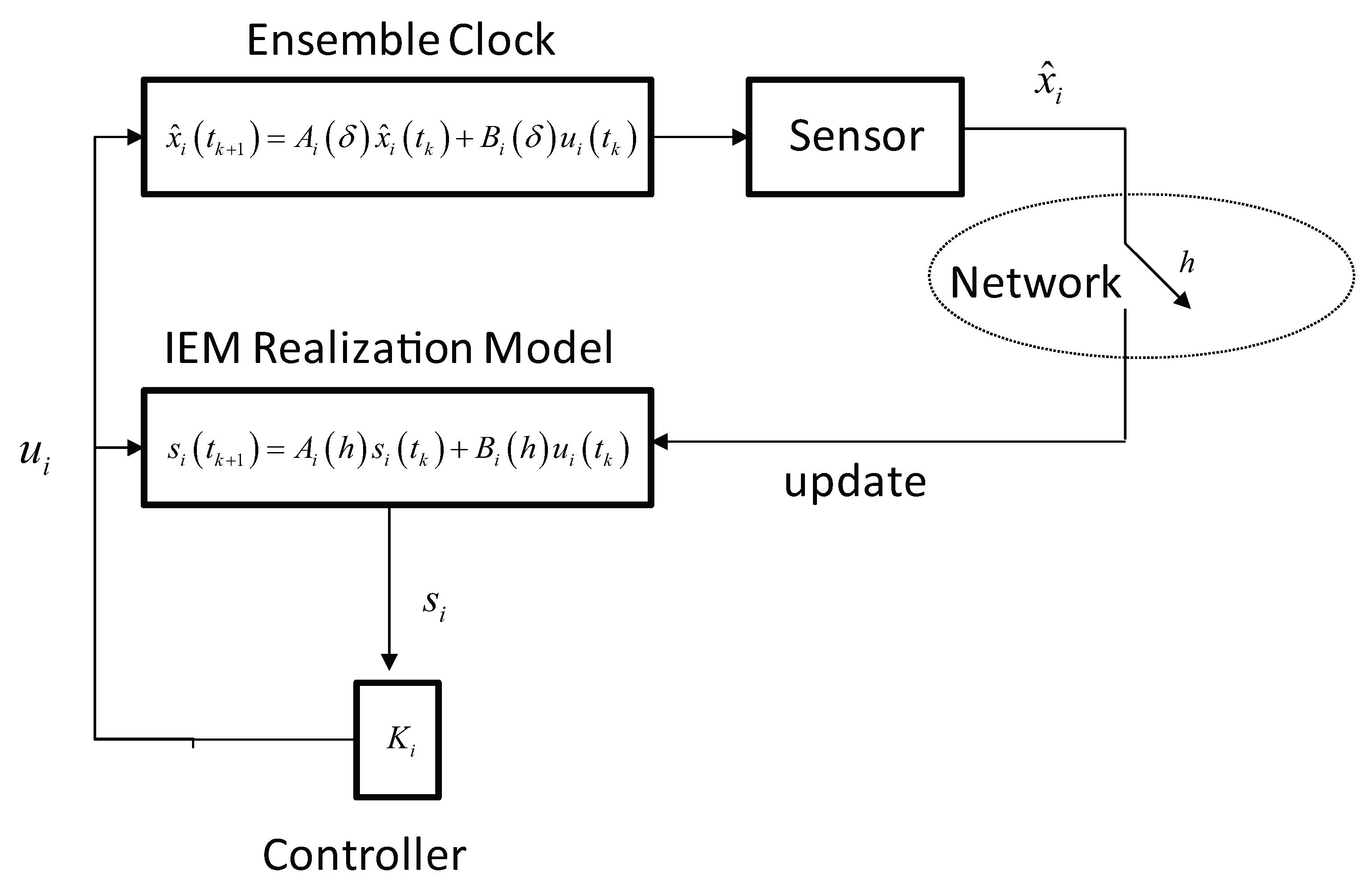
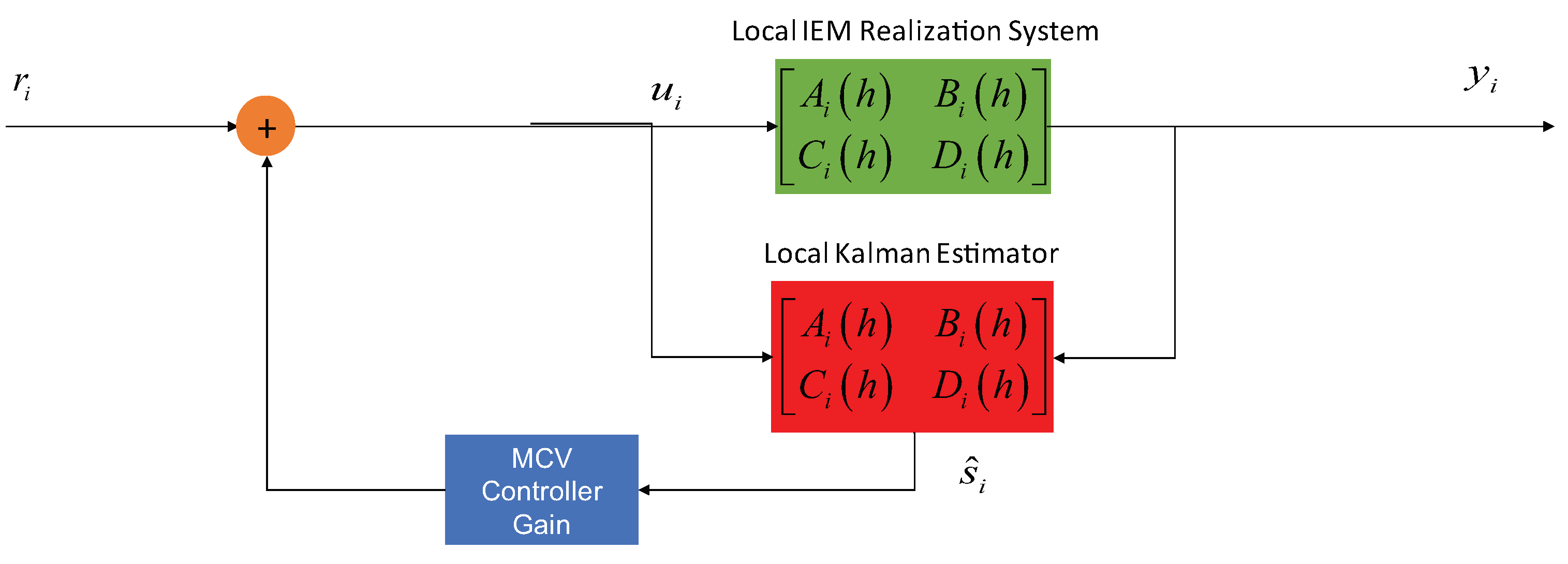
Under suitable conditions where both process and measurement noises are Gaussian, the design of stochastic control herein can be further extended and thus divided into two separate problems, one of optimal control with full state information and one of filtering. The remainder of the research investigation is to present a framework for the separation principle, which is more in line with basic engineering thinking, e.g., the optimal feedback law for steering commands is linear in the data feedback and given by
where
is obtained by a local Kalman state estimator. Each platform
i in
Figure 11 uses the steering command (
112) based on the Kalman state estimator for feedback frequency adjustments to ensure that the phase offset between the steerable OCXO and the IEM estimate is driven to zero.
7. Conclusions
This article highlights the promising concept of an emergent time scale in AltPNT and addresses the technical challenges of achieving onboard ensemble time scale autonomy, primarily through inter-platform measurements. While the initial findings may seem simplified, they are intended to ignite a stronger interest in developing and deploying onboard ensemble time scales within pLEO constellations.
AltPNT is vital for the success of satellite constellations, which are meant to be reconstituted every three to five years. Research shows that assembling flexible ensemble time scales across pLEO constellations is not only feasible but can be efficiently performed through on-orbit assembly. This innovative process leverages autonomous networked control of time scale realizations, both during and after integrating crucial information about IEM estimation into inter-platform communication networks. Moreover, employing existing satellite crosslinks and expertly navigating the trade-offs between open-loop and closed-loop control greatly affects the control interval, highlighting its importance in effective clock steering. This approach is not just a technical possibility; it is a transformative step forward in satellite technology, which paves the way for enhanced precision and reliability in navigation and timing.
Achieving high-precision time synchronization is essential and hinges on a comprehensive understanding of first-order Doppler effects, which influence frequency changes in received signals. These changes are directly tied to the relative position and velocity of orbital platforms. This subject stands apart from the existing literature surrounding clock ensemble generation and realization, which emphasizes its unique importance.
A resilient method is proposed for delivering precision timing across a distributed architecture, which involves discreet data transport between the anchor orbital platform and the participating platforms. This innovative approach guarantees exceptional communication performance through ad hoc, non-dedicated requests for clock data transport while optimizing power allocation to fulfill diverse service needs.
Furthermore, the autonomous assembly of active MCV controllers plays a pivotal role in precisely synchronizing one frequency standard with another. This process ensures the creation of an onboard low SWaP time scale backup, which is in phase and frequency with the IEM reference. Thanks to the robustness of the MCV control algorithm, reliable time scale realizations can be achieved even in the face of stochastic noise processes and performance uncertainties that exceed expected thresholds. This robust framework paves the way for advancing precision timing in orbital contexts, making it an investment worth pursuing.
The findings presented here underscore the significant opportunity in achieving unparalleled operational effectiveness and efficiency in ad hoc and non-dedicated pLEO services, especially under extreme radio conditions like GNSS outages. By leveraging local autonomous agents onboard pLEO constellations, one can facilitate an innovative integration of primary satellite communication and secondary PNT services at the physical layer. This integration is guided by regulatory policies, which are informed by data link layers and forecasts on link capacity resources, thus paving the way for enhanced reliability and performance.
Looking ahead, we see future work focusing on modeling, simulation, and analysis to conduct trade-off studies aimed at achieving remarkable 100-picosecond radio time synchronization across the constellation, utilizing advanced software-defined radios in collaboration with leading teams. Additionally, the development of ensemble algorithms will be explored to effectively deploy both local and remote clocks at scale. This initiative aims to ensure precise timing distribution across distant assets while addressing challenges such as clock drift, network latency, Doppler effects, and relativistic influences.
To support this experimental framework, it is essential to identify high-performance inter-platform measurement devices. The characterization of all ensemble clocks will concentrate on defining parameters for Kalman filters, which are crucial for hardware implementation to optimize computation time per iteration. Together, these efforts promise to revolutionize the capabilities of pLEO systems and enhance our preparedness for future challenges.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}