




Target Positioning and Tracking in WSNs Based on AFSA



Abstract
1. Introduction
2. AFSA and RSSI Model
2.1. AFSA
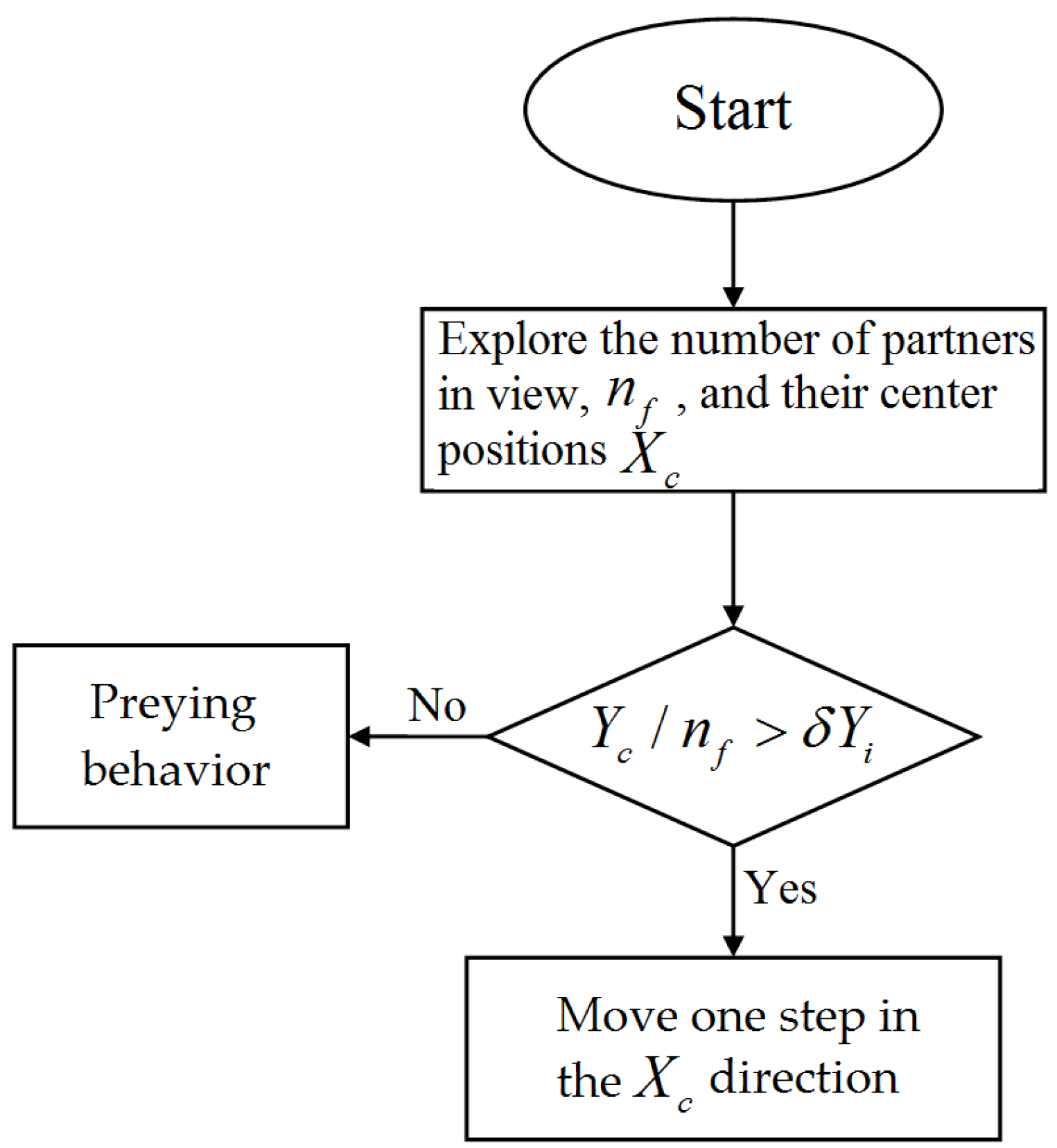
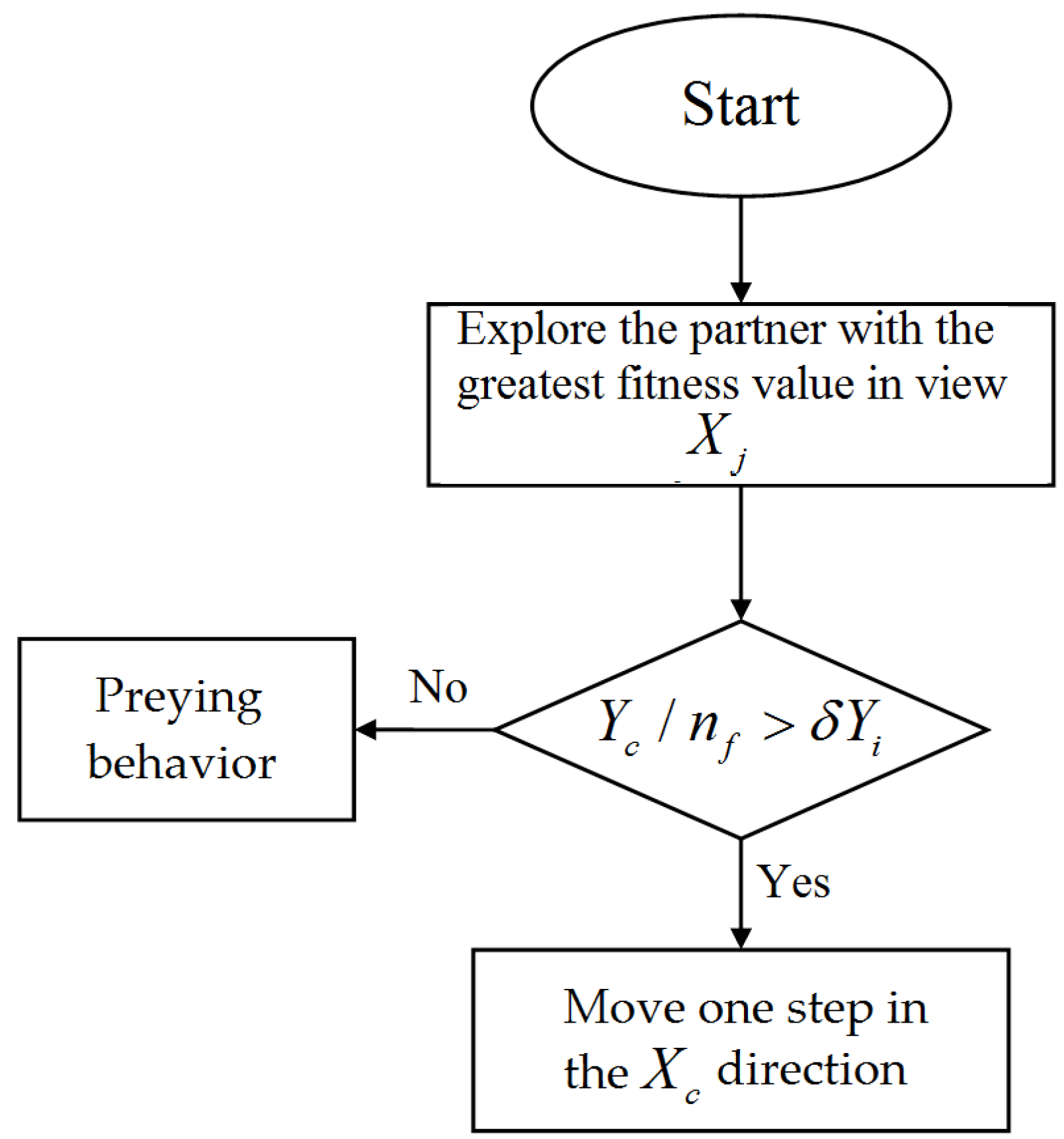
2.1.1. Basic Behaviors in AFSA
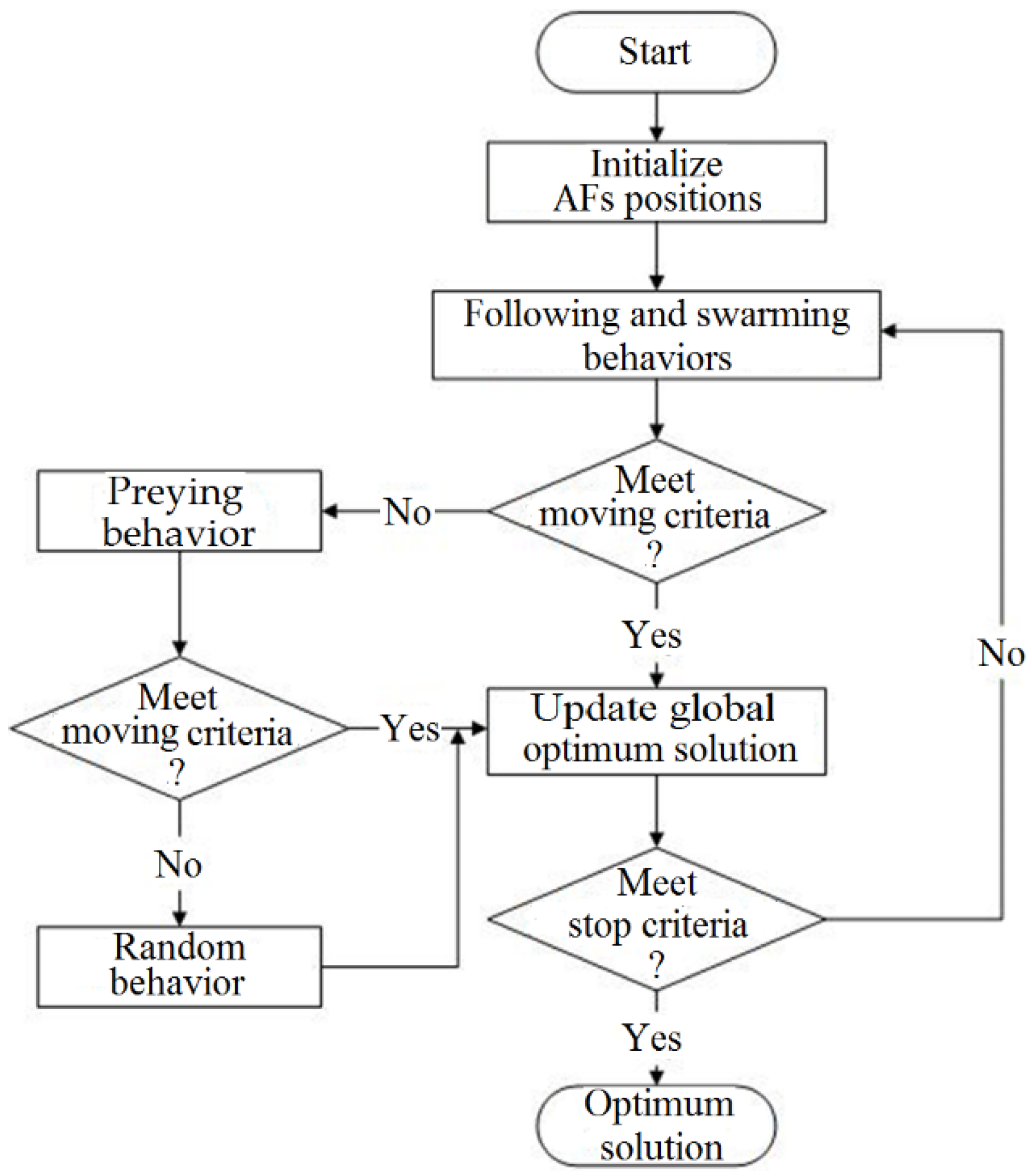
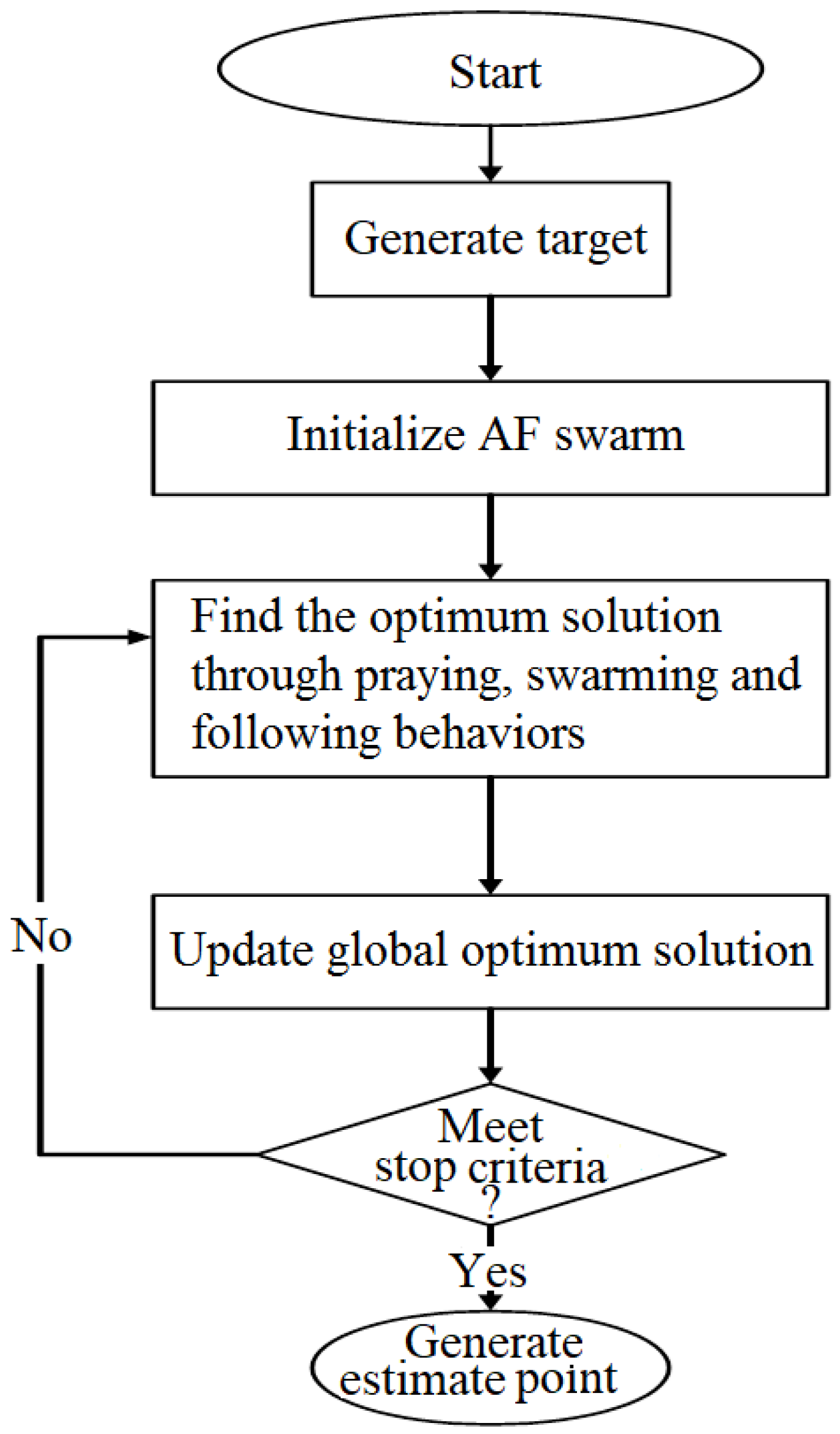
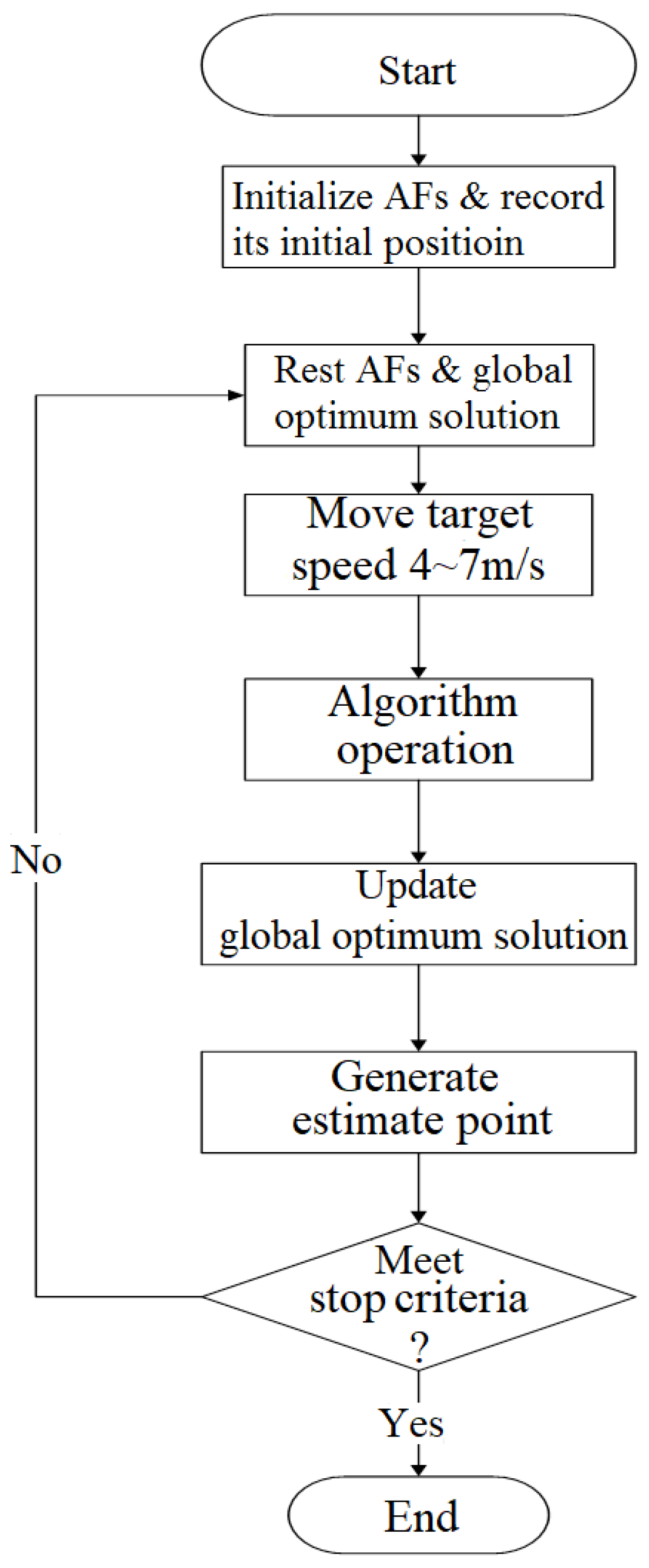
2.1.2. Flow Chart of AFSA
2.1.3. Influence of Algorithm Parameters on System Convergence
2.2. RSSI Model
3. System Model
3.1. Target Positioning Method
3.1.1. Adaptive Step Size and Visual Range
3.1.2. Hybrid Adaptive Vision of Prey
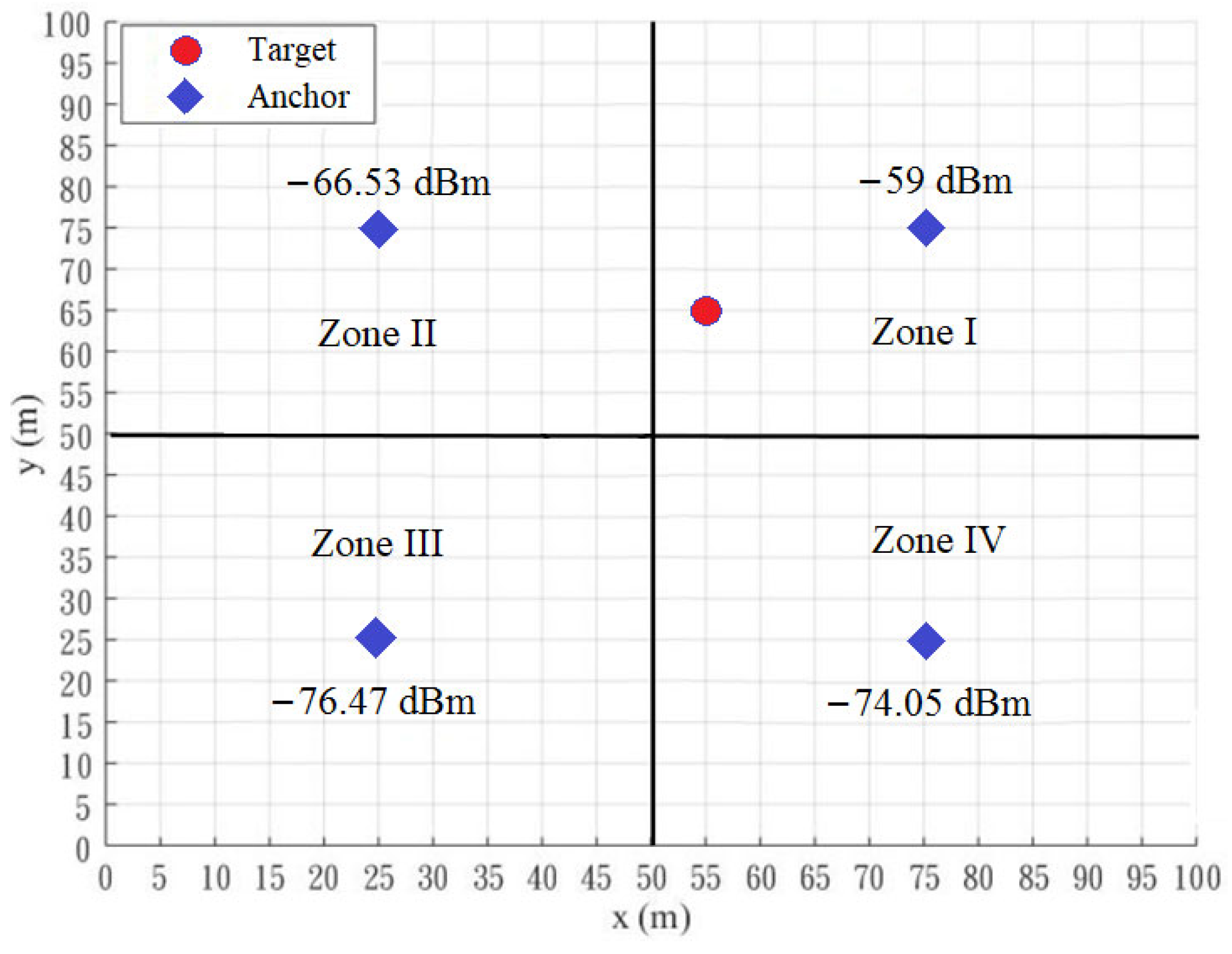
3.1.3. Region Segmentation Method [30]
3.2. Target Tracking Method
3.2.1. Tracks Definition
3.2.2. AF Movement Restriction in the Algorithm
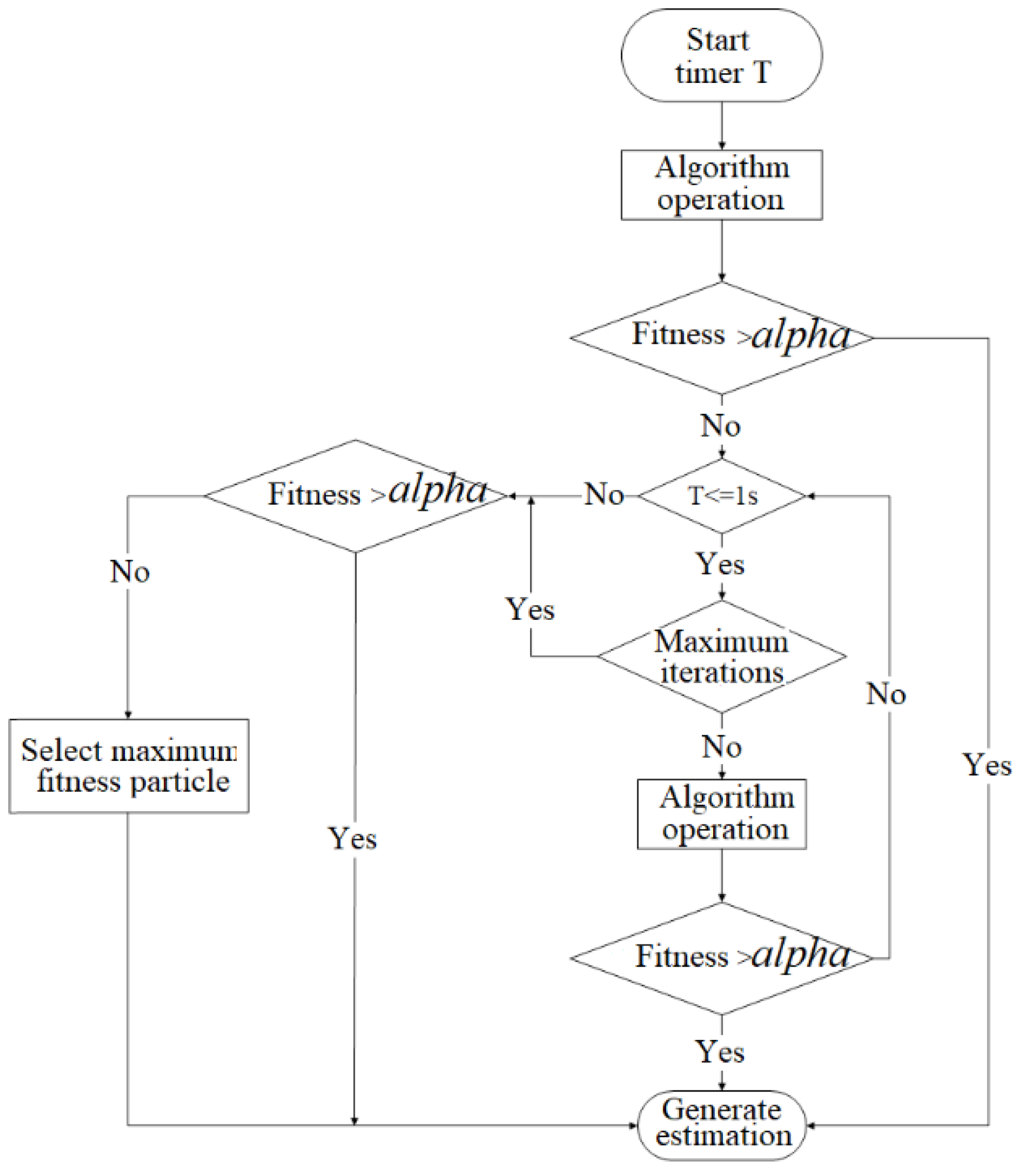
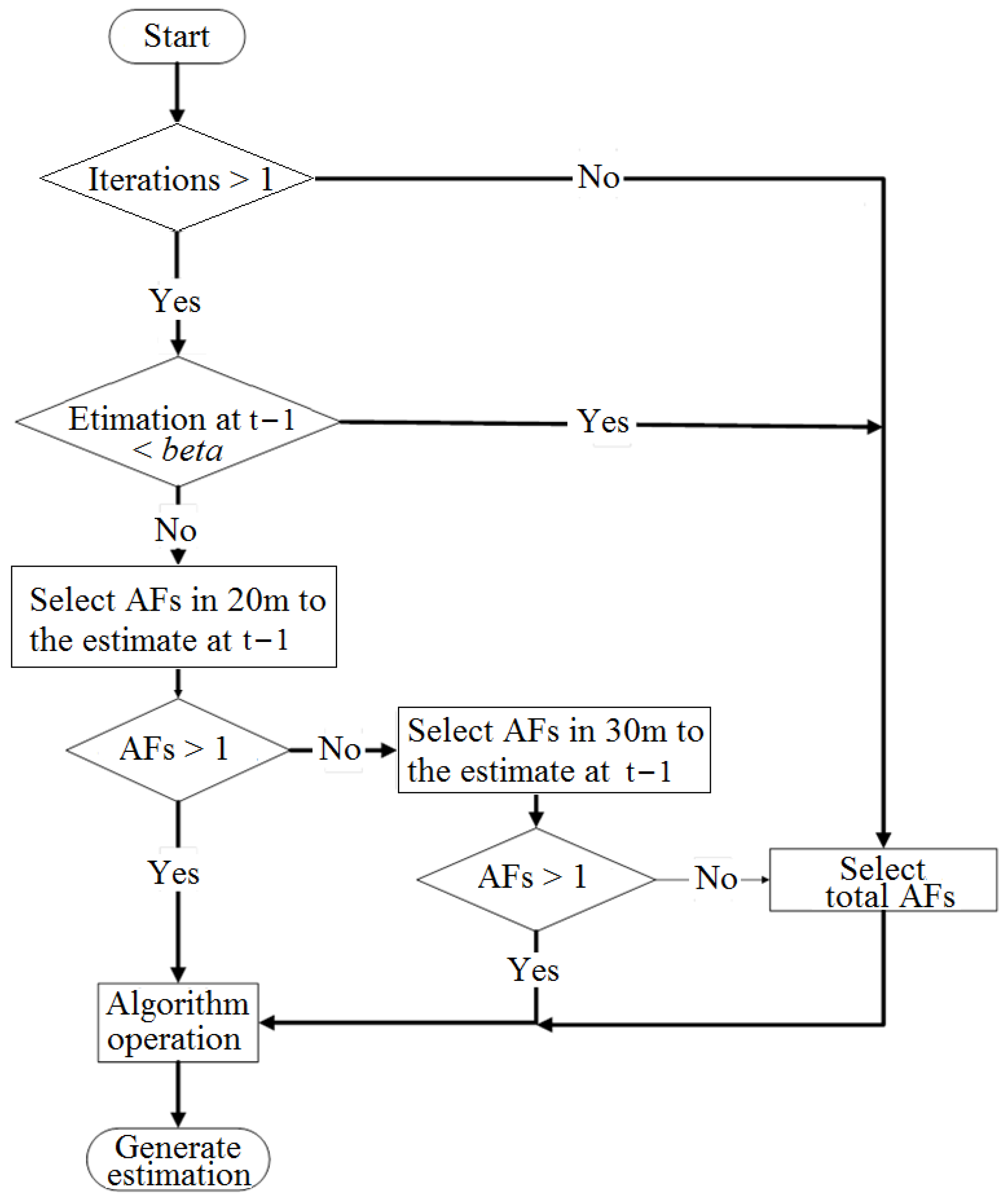
3.2.3. Dynamic AF Selection Method
4. Simulation Results
4.1. Simulation Environment
4.2. Simulation on Target Positioning
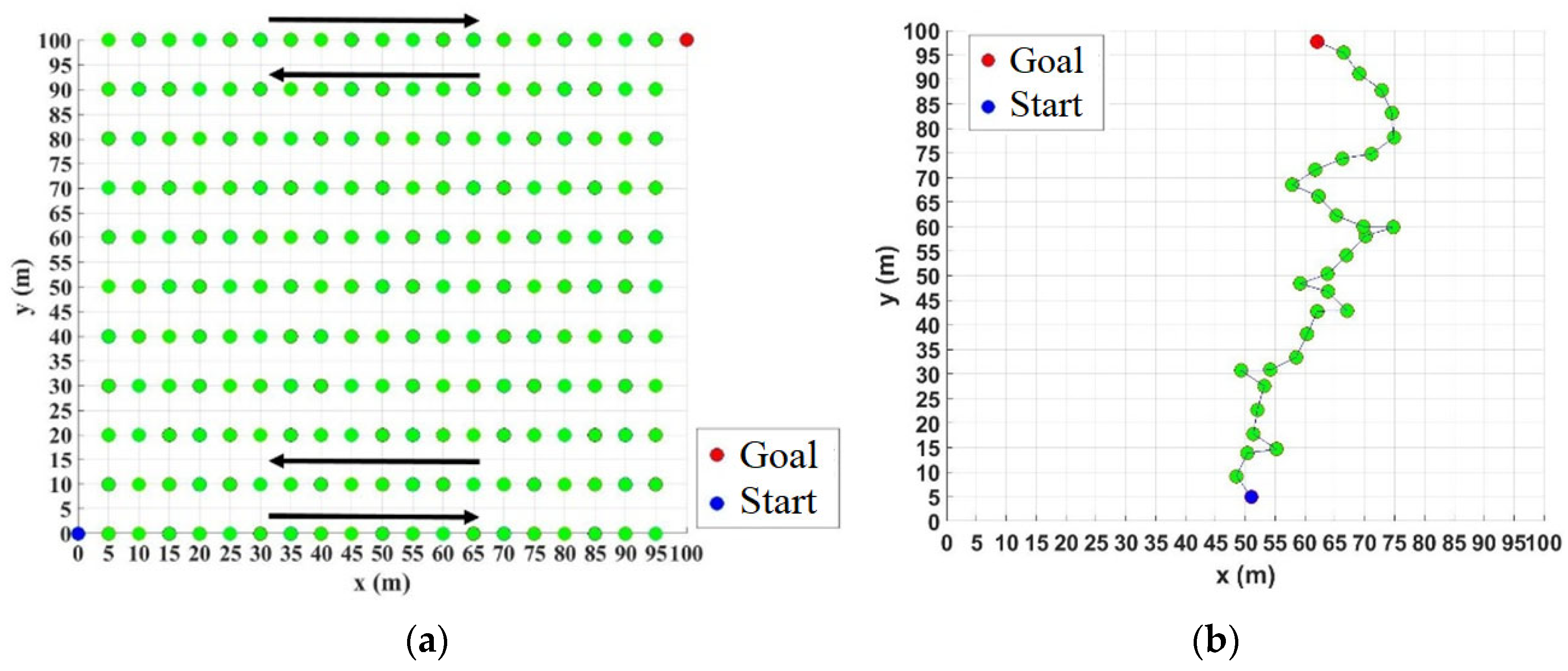
4.3. Simulation on Target Tracking
5. Discussion
5.1. Target Positioning
5.2. Target Tracking
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rajaravivarma, V.; Yang, Y.; Yang, T. An overview of Wireless Sensor Network and applications. In Proceedings of the 35th Southeastern Symposium on System Theory, Morgantown, WV, USA, 16–18 March 2003; pp. 432–436. [Google Scholar] [CrossRef]
- Corke, P.; Wark, T.; Jurdak, R.; Hu, W.; Valencia, P.; Moore, D. Environmental Wireless Sensor Networks. IEEE 2010, 98, 1903–1917. [Google Scholar] [CrossRef]
- Suo, H.; Wan, J.; Huang, L.; Zou, C. Issues and Challenges of Wireless Sensor Networks Localization in Emerging Applications. In Proceedings of the 2012 International Conference on Computer Science and Electronics Engineering, Hangzhou, China, 23–25 March 2012; pp. 447–451. [Google Scholar] [CrossRef]
- Xu, E.-Y.; Ding, Z.; Dasgupta, S. Target Tracking and Mobile Sensor Navigation in Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2011, 12, 177–186. [Google Scholar] [CrossRef]
- Mesmoudil, A.; Fehaml, M.; Labraouil, N. Wireless Sensor Networks Localization Algorithms: A Comprehensive Survey. Int. J. Comput. Netw. Commun. 2013, 5, 1–20. [Google Scholar] [CrossRef]
- Cheng, L.; Wu, C.; Zhang, Y.; Wu, H.; Li, M.; Maple, C. A Survey of Localization in Wireless Sensor Network. Int. J. Distrib. Sens. Netw. 2012, 8, 12. [Google Scholar] [CrossRef]
- La, H.-M.; Nguyen, T.-H.; Hguyen, C.-H.; Nguyen, H.N. Optimal Flocking Control for a Mobile Sensor Network Based a Moving Target Tracking. In Proceedings of the IEEE International Conference on System, Man, and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 4801–4806. [Google Scholar] [CrossRef]
- Laaraiedh, M.; Yu, L.; Avrillon, S.; Uguen, B. Comparison of Hybrid Localization Schemes using RSSI, TOA, and TDOA. In Proceedings of the IEEE Wireless Conference 2011-Substainalbe Wireless Technologies (European Wireless) 11th Europeanm, Vanna, Austria, 27–29 April 2011; pp. 1–5. [Google Scholar]
- Cheng, L.; Wu, C.-D.; Zhang, Y.-Z. Indoor Robot Localization Based on Wireless Sensor Networks. IEEE Trans. Comput. Electron. 2011, 57, 1099–1104. [Google Scholar] [CrossRef]
- Chugunov, A.; Petukhov, N.; Kulikov, R. ToA Positioning Algorithm for TDoA System Architecture. In Proceedings of the International Russian Automation Conference (RusAutoCon), Sochi, Russia, 6–12 September 2020; pp. 871–876. [Google Scholar] [CrossRef]
- Ahmed, S.; Abbasi, A.; Liu, H. A Novel Hybrid AoA and TDoA Solution for Transmitter Positioning. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Barcelona, Spain, 4–7 October 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Xu, C.-X.; Chen, J.-Y. Three-dimentional Sensor Node Localization based on AFSA-LSSVM. Int. J. Control. Autom. 2014, 7, 399–406. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, W.; Song, Q. A Novel WSNs Localization Algorithm Based on Artificial Fish Swarm Algorithm. Int. J. Online Eng. 2016, 12, 64–68. [Google Scholar] [CrossRef]
- Wen, S.; Cai, X.; Guan, W.; Jiang, J.; Chen, B.; Huang, M. High-precision indoor three-dimensional positioning system based on visible light communication using modified artificial fish swarm algorithm. Opt. Eng. 2018, 57, 106102. [Google Scholar] [CrossRef]
- Li, X.-L.; Shao, Z.-J.; Qian, J.-X. An Optimizing Method Based on Autonomous Animats: Fish-swarm Algorithm. Chin. J. Circuits Syst. 2002, 22, 32–38. [Google Scholar] [CrossRef]
- Li, X.-L.; Qian, J.-X. Studies on Artificial Fish Swarm Optimization Algorithm based on Decomposition and Coordination Techniques. Chin. J. Syst. Eng. Theory Pract. 2003, 8, 1–6. [Google Scholar]
- Shan, X.-J.; Jiang, M.-Y.; Li, J.-P. The Routing Optimization Based on Improved Artificial Fish Swarm Algorithm. In Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 3658–3662. [Google Scholar] [CrossRef]
- He, S.; Hamam, N.B.H.; Bouslimani, Y. Fuzzy Clustering with Improved Artificial Fish Swarm Algorithm. In Proceedings of the International Joint Conference on Computational Sciences and Optimization, Sanya, China, 24–26 April 2009; pp. 317–321. [Google Scholar] [CrossRef]
- Jiang, M.-Y.; Yuan, D.-F.; Cheng, Y.-M. Improved Artificial Fish Swarm Algorithm. In Proceedings of the Fifth International Conference on Natural Computation, Tianjin, China, 14–16 August 2009; pp. 281–285. [Google Scholar] [CrossRef]
- Cheng, Y.-M.; Jiang, M.-Y.; Yuan, D. Novel Clustering Algorithm Based on Improved Artificial Fish Swarm Algorithm. In Proceedings of the FSK 09. Sixth International Conference on Fuzzy System and Knowledge Discovery, Tianjin, China, 14–16 August 2009; pp. 141–145. [Google Scholar] [CrossRef]
- Fernandes, E.M.G.P.; Martins, T.F.M.C.; Rocha, A.M.A.C. Fish Swarm Algorithm for Bound Constrained Global Optimization. In Proceedings of the International Conference on Computational and Mathematical Methods in Science and Engineering, Asturias, Spain, 30 June–3 July 2009. [Google Scholar]
- Zhang, C.; Zhang, F.-M.; Li, F.; Wu, H.-S. Improved Artificial Fish Swarm Algorithm. In Proceedings of the 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; pp. 748–753. [Google Scholar] [CrossRef]
- Neshat, M.; Sepidnam, G.; Sargolzaei, M.; Toosi, A.N. Artificial fish swarm algorithm: A survey of the state-of-the-art, hybridization, combinatorial and indicative applications. Artif. Intell. Rev. 2014, 42, 965–997. [Google Scholar] [CrossRef]
- Fang, Z.; Zhao, Z.; Geng, D.; Xuan, Y.-D.; Du, L.-D.; Cui, X.-X. RSSI Variability Characterization and Calibration Method in Wireless Sensor Network. In Proceedings of the IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 1532–1537. [Google Scholar] [CrossRef]
- Xiong, J.-Q.; Qin, Q.; Zheng, K.-M. A Distant Measurement Wireless Localization Correction Algorithm Based on RSSI. In Proceedings of the Seventh International Symposium on Computation Intelligence and Design, Hangzhou, China, 13–14 December 2014; pp. 176–278. [Google Scholar] [CrossRef]
- Barsocchi, P.; Lenzi, S.; Chessa, S.; Giunta, G. A Novel Approach to Indoor RSSI Localization by Automatic Calibration of the Wireless Propagation Model. In Proceedings of the IEEE 69th Vehicular Technology Conference, Barcelona, Spain, 26–29 April 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Mahmud, M.I.; Abdelgawad, A.; Yanambaka, V.P.; Yelamarthi, K. Packet Drop and RSSI Evaluation for LoRa: An Indoor Application Perspective. In Proceedings of the IEEE 7th World Forum on Internet of Things (WF-IoT), New Orleans, LA, USA, 14 June–31 July 2021; pp. 913–914. [Google Scholar] [CrossRef]
- Yao, L.; Peng, X.; Shi, D.; Liu, B. Design of Indoor Positioning System Based on RSSI Algorithm. In Proceedings of the International Conference on Management Science and Software Engineering (ICMSSE), Chengdu, China, 9–11 July 2021; pp. 145–148. [Google Scholar] [CrossRef]
- Hu, X.T.; Zhang, H.Q.; Li, Z.C.; Huang, Y.A.; Yin, Z.P. A Novel Self-Adaptation Hybrid Artificial Fish-Swarm Algorithm. In Proceedings of the 2013 IFAC, Hangzhou, China, 10–12 March 2013; Volume 46, pp. 583–588. [Google Scholar] [CrossRef]
- Lee, S.-H.; Cheng, C.-H.; Lin, C.-C.; Huang, Y.-F. PSO-Based Target Localization and Tracking in Wireless Sensor Networks. Electronics 2023, 12, 905. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Specification |
|---|---|
| OS | Windows 7 Enterprise 64 bits |
| CPU | Intel(R) Core(TM) i5-4590 3.30 GHz |
| RAM | 8 GB |
| MATLAB Edition | R2015a |
| Parameter | Value |
|---|---|
| Transmission Power Pt | 2 mW |
| Carrier Frequency f | 2.4 GHz |
| Path Loss Exponent n | 4.5 |
| Reference Distance d0 | 0.5 m |
| Antenna Gains Gt, Gr | 1 |
| Standard Deviation σ | 9 dBm |
| Parameter | Value | |
|---|---|---|
| Target Positioning | Target Tracking | |
| Network size | 100 m 100 m | |
| Number of executions | 100 | |
| Number of iterations Tmax | 100 | |
| Number of sensors M | 100, 72, 52, 24, 12 | |
| Number of targets N | 10 | 1 |
| Try number Try_Number | 100 | |
| Initial step Step | Visual/8 2 | |
| Initial visual Visual | networkSize/5 2 | |
| Minimum step Stepmin | 5 1,2 | |
| Minimum visual Visualmin | 50 1,2 | |
| Convergence factor S | 4 2 | |
| Threshold alpha | * | −6.5 dBm |
| Correction factor beta | * | −15 dBm |
| Mode | Condition | |||
|---|---|---|---|---|
| Fixed Step | Adaptive Step and Vision | RSM | HAVP | |
| P1 | ✓ | |||
| P2 | ✓ | |||
| P3 | ✓ | ✓ | ||
| P4 | ✓ | ✓ | ||
| P5 | ✓ | ✓ | ||
| P6 | ✓ | ✓ | ||
| P7 | ✓ | ✓ | ✓ | |
| P8 | ✓ | ✓ | ✓ | |
| Number of AF | P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 |
|---|---|---|---|---|---|---|---|---|
| 100 | 0.874 | 0.892 | 2.516 | 2.562 | 0.000 | 0.000 | 0.000 | 0.000 |
| 72 | 1.117 | 1.113 | 3.359 | 3.358 | 0.000 | 0.000 | 0.000 | 0.000 |
| 54 | 1.614 | 1.500 | 4.320 | 4.418 | 0.000 | 0.000 | 0.000 | 0.000 |
| 24 | 2.953 | 2.991 | 8.370 | 8.694 | 0.000 | 0.000 | 0.000 | 0.000 |
| 12 | 5.520 | 5.341 | 251.316 | 231.705 | 0.121 | 0.000 | 11.162 | 10.247 |
| Average | 2.416 | 2.367 | 53.976 | 50.147 | 0.024 | 0.000 | 2.232 | 2.049 |
| Number of AF | P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 |
|---|---|---|---|---|---|---|---|---|
| 100 | 12.986 | 13.790 | 3.406 | 3.191 | 9.184 | 10.018 | 2.382 | 2.363 |
| 72 | 8.916 | 9.613 | 2.203 | 2.541 | 6.546 | 7.642 | 1.749 | 1.650 |
| 54 | 6.634 | 6.750 | 1.624 | 1.787 | 4.778 | 4.996 | 1.362 | 1.236 |
| 24 | 2.974 | 3.085 | 0.860 | 0.782 | 2.108 | 2.236 | 0.676 | 0.732 |
| 12 | 1.326 | 1.352 | 0.174 | 0.206 | 1.049 | 1.176 | 0.308 | 0.290 |
| Average | 6.567 | 6.918 | 1.653 | 1.701 | 4.733 | 5.214 | 1.295 | 1.254 |
| Mode | RSM | HAVP | DAFS |
|---|---|---|---|
| K1 | |||
| K2 | ✓ | ||
| K3 | ✓ | ||
| K4 | ✓ | ✓ | |
| K5 | ✓ | ||
| K6 | ✓ | ✓ | |
| K7 | ✓ | ✓ | |
| K8 | ✓ | ✓ | ✓ |
| Number of AF | K1 | K2 | K3 | K4 | K5 | K6 | K7 | K8 |
|---|---|---|---|---|---|---|---|---|
| 100 | 0.081 | 0.058 | 0.076 | 0.040 | 0.041 | 0.032 | 0.040 | 0.026 |
| 72 | 0.065 | 0.041 | 0.067 | 0.030 | 0.038 | 0.034 | 0.041 | 0.028 |
| 54 | 0.061 | 0.043 | 0.061 | 0.033 | 0.051 | 0.048 | 0.040 | 0.032 |
| 24 | 0.044 | 0.039 | 0.046 | 0.023 | 0.109 | 0.098 | 0.042 | 0.038 |
| 12 | 0.041 | 0.064 | 0.037 | 0.058 | 0.123 | 0.109 | 0.048 | 0.044 |
| Average | 0.0584 | 0.049 | 0.0574 | 0.0368 | 0.0724 | 0.0642 | 0.0422 | 0.0336 |
| Number of AF | K1 | K2 | K3 | K4 | K5 | K6 | K7 | K8 |
|---|---|---|---|---|---|---|---|---|
| 100 | 99% | 81% | 100% | 83% | 100% | 97% | 100% | 98% |
| 72 | 99% | 100% | 100% | 100% | 99% | 99% | 98% | 99% |
| 54 | 100% | 100% | 100% | 99% | 95% | 96% | 97% | 96% |
| 24 | 97% | 100% | 99% | 95% | 85% | 94% | 96% | 96% |
| 12 | 94% | 76% | 100% | 85% | 85% | 80% | 95% | 97% |
| Average | 97.8% | 91.4% | 99.8% | 92.4% | 92.8% | 93.2% | 97.2% | 97.2% |
| Number of AF | Average Error (cm) | Average Positioning Time (s) |
|---|---|---|
| 100 | 0.849 | 7.272 |
| 72 | 1.121 | 5.081 |
| 54 | 1.467 | 3.638 |
| 24 | 2.839 | 1.658 |
| 12 | 66.064 | 0.741 |
| Parameter | Fixed Step | Adaptive Step |
|---|---|---|
| Average error (cm) | 14.589 | 14.347 |
| Average positioning time (s) | 3.587 | 3.587 |
| Parameter | No RSM | RSM |
|---|---|---|
| Average error (cm) | 1.185 | 27.750 |
| Average positioning time (s) | 5.866 | 1.490 |
| Parameter | No HAVP | HAVP |
|---|---|---|
| Average error (cm) | 27.861 | 1.074 |
| Average positioning time (s) | 4.237 | 3.120 |
| Parameter | No RSM + HAVP | RSM | HAVP | RSM + HAVP |
|---|---|---|---|---|
| Average error (cm) | 2.36 | 53.36 | 0.01 | 2.14 |
| Average positioning time (s) | 6.76 | 1.71 | 4.97 | 1.27 |
| Number of AF | Average Positioning Time (s) | Average Success Rate | ||
|---|---|---|---|---|
| No RSM | RSM | No RSM | RSM | |
| 100 | 0.060 | 0.039 | 99.8% | 99.5% |
| 72 | 0.053 | 0.033 | 99.0% | 99.5% |
| 54 | 0.053 | 0.039 | 98.0% | 97.8% |
| 24 | 0.060 | 0.050 | 94.3% | 96.3% |
| 12 | 0.062 | 0.069 | 93.5% | 84.5% |
| Number of AF | Average Positioning Time (s) | Average Success Rate | ||
|---|---|---|---|---|
| K1 | K5 | K1 | K5 | |
| 100 | 0.081 | 0.041 | 99% | 100% |
| 72 | 0.065 | 0.038 | 99% | 99% |
| 54 | 0.061 | 0.051 | 100% | 95% |
| 24 | 0.044 | 0.109 | 97% | 85% |
| 12 | 0.041 | 0.123 | 94% | 85% |
| Parameter | K1 | K3 | K7 | K8 |
|---|---|---|---|---|
| Average positioning time (s) | 0.0584 | 0.0574 | 0.0422 | 0.0336 |
| Average success rate | 97.8% | 99.8% | 97.2% | 97.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.-H.; Cheng, C.-H.; Lin, C.-C.; Huang, Y.-F. Target Positioning and Tracking in WSNs Based on AFSA. Information 2023, 14, 246. https://doi.org/10.3390/info14040246
Lee S-H, Cheng C-H, Lin C-C, Huang Y-F. Target Positioning and Tracking in WSNs Based on AFSA. Information. 2023; 14(4):246. https://doi.org/10.3390/info14040246
Chicago/Turabian StyleLee, Shu-Hung, Chia-Hsin Cheng, Chien-Chih Lin, and Yung-Fa Huang. 2023. "Target Positioning and Tracking in WSNs Based on AFSA" Information 14, no. 4: 246. https://doi.org/10.3390/info14040246
APA StyleLee, S.-H., Cheng, C.-H., Lin, C.-C., & Huang, Y.-F. (2023). Target Positioning and Tracking in WSNs Based on AFSA. Information, 14(4), 246. https://doi.org/10.3390/info14040246