
Pedestrian Detection and Tracking System Based on Deep-SORT, YOLOv5, and New Data Association Metrics

 , and
, and
Abstract
1. Introduction
2. Related Work
2.1. Object Tracking
2.2. Tracking by Detection
2.3. Joint Tracking
2.4. Tracking Applied in Pedestrian Detection Systems
3. Methodology
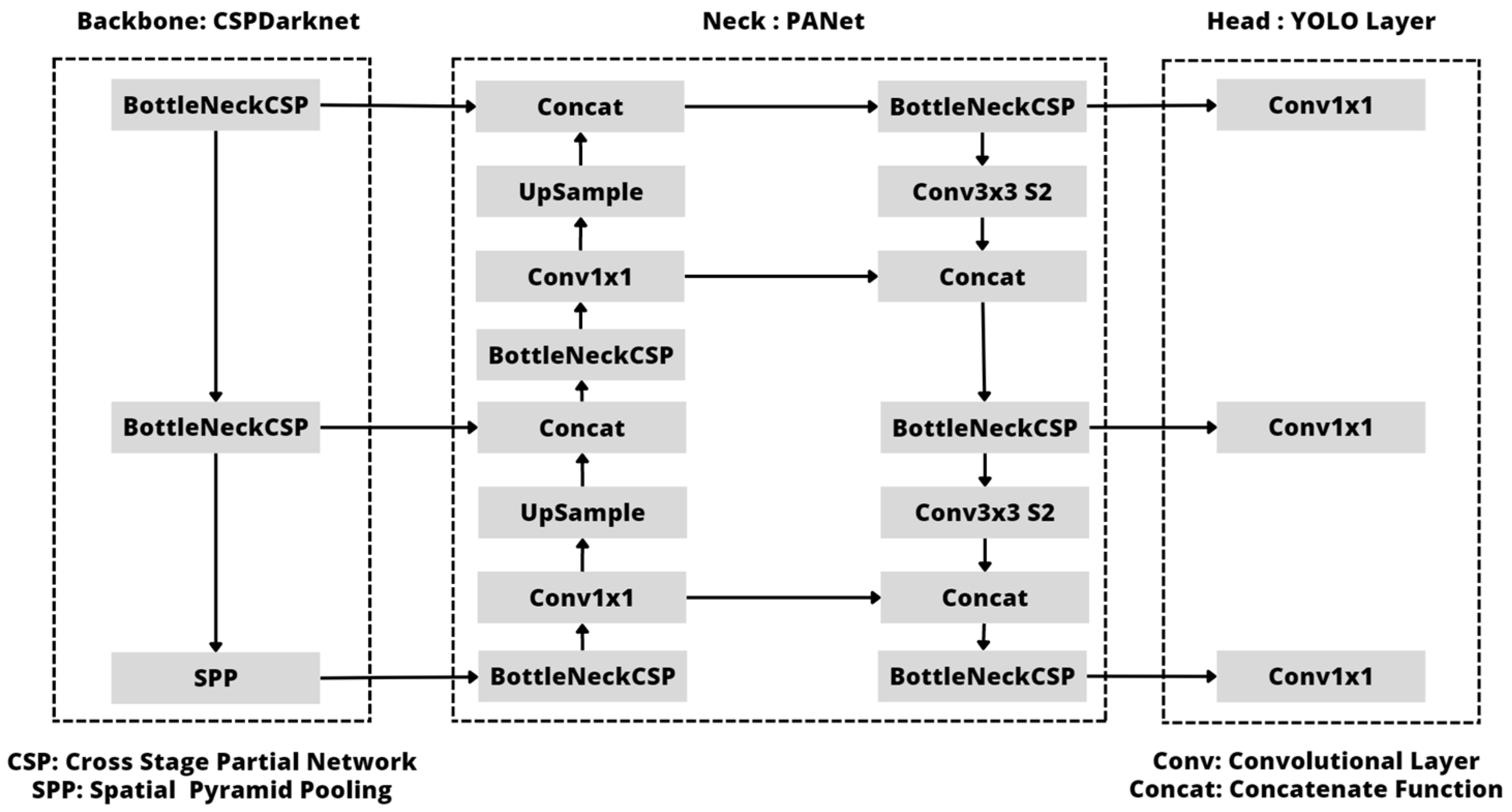
3.1. YOLOv5
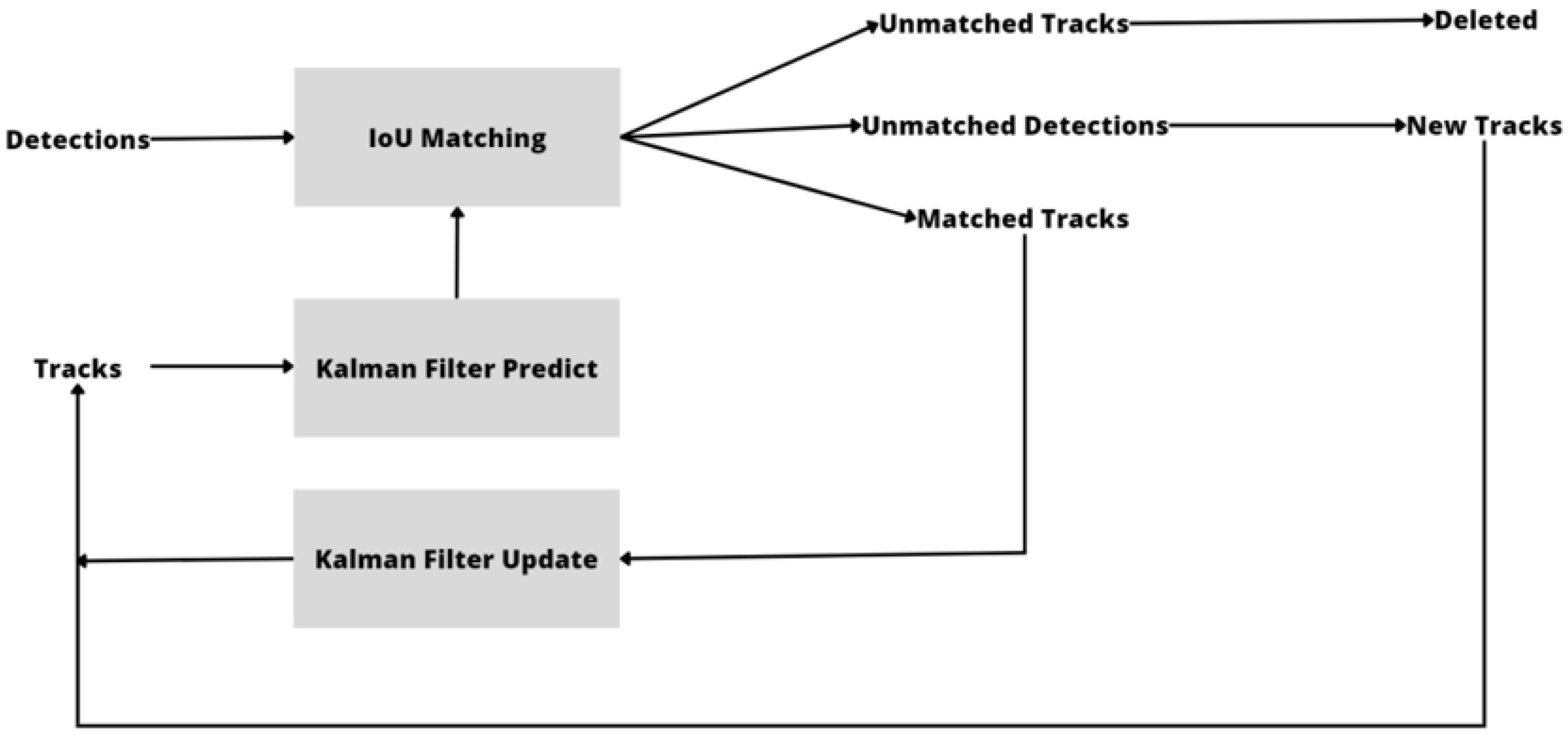
3.2. SORT
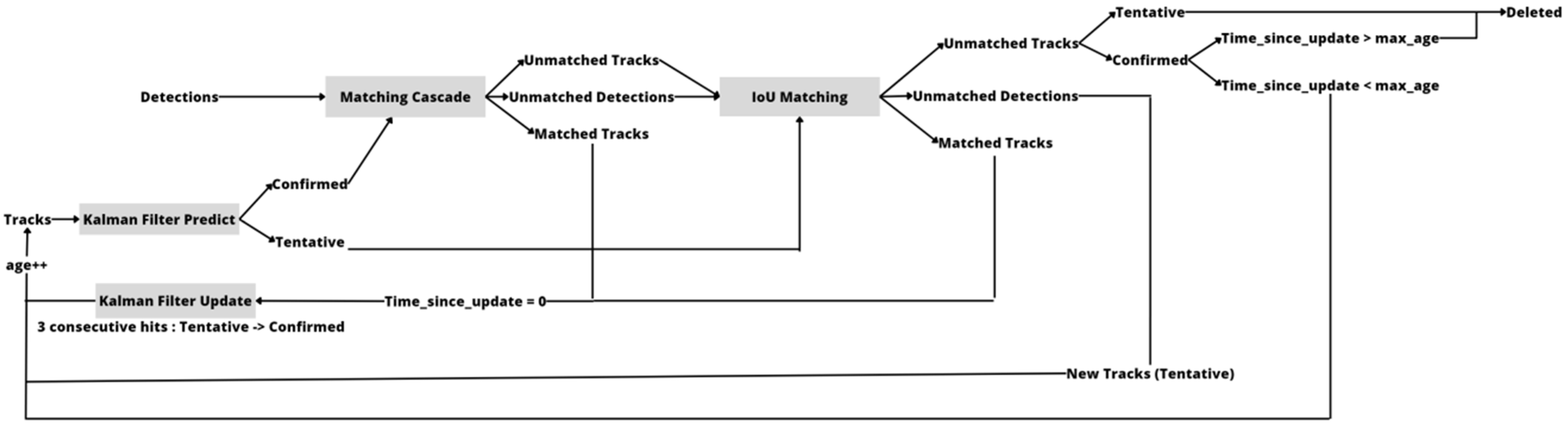
3.3. Deep-SORT
3.4. Data Association
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Razzok, M.; Badri, A.; Ruichek, Y.; Sahel, A. Street crossing pedestrian detection system a comparative study of descriptor and classification methods. In Colloque sur les Objets et systèmes Connectés; Higher School of Technology of Casablanca (ESTC): Casablanca, Morocco; University Institute of Technology of Aix-Marseille: Marseille, France, 2019. [Google Scholar]
- Razzok, M.; Badri, A.; Mourabit, I.E.L.; Ruichek, Y.; Sahel, A. A new pedestrian recognition system based on edge detection and different census transform features under weather conditions. IAES Int. J. Artif. Intell. 2022, 11, 582–592. [Google Scholar] [CrossRef]
- Razzok, M.; Badri, A.; Mourabit, I.E.L.; Ruichek, Y.; Sahel, A. Pedestrian Detection System Based on Deep Learning. IJAAS Int. J. Adv. Appl. Sci. 2022, 11, 194–198. [Google Scholar] [CrossRef]
- Zhou, H.; Wu, T.; Sun, K.; Zhang, C. Towards high accuracy pedestrian detection on edge gpus. Sensors 2022, 22, 5980. [Google Scholar] [CrossRef] [PubMed]
- He, Y.; Zhu, C.; Yin, X.-C. Occluded Pedestrian Detection via Distribution-Based Mutual-Supervised Feature Learning. IEEE Trans. Intell. Transp. Syst. 2021, 23, 10514–10529. [Google Scholar] [CrossRef]
- Devi, S.; Thopalli, K.; Malarvezhi, P.; Thiagarajan, J.J. Improving Single-Stage Object Detectors for Nighttime Pedestrian Detection. Int. J. Pattern Recognit. Artif. Intell. 2022, 36, 2250034. [Google Scholar] [CrossRef]
- Velázquez, J.A.A.; Huertas, M.R.; Eleuterio, R.A.; Gutiérrez, E.E.G.; Del Razo López, F.; Lara, E.R. Pedestrian Localization in a Video Sequence Using Motion Detection and Active Shape Models. Appl. Sci. 2022, 12, 5371. [Google Scholar] [CrossRef]
- Chen, X.; Jia, Y.; Tong, X.; Li, Z. Research on Pedestrian Detection and DeepSort Tracking in Front of Intelligent Vehicle Based on Deep Learning. Sustainability 2022, 14, 9281. [Google Scholar] [CrossRef]
- He, L.; Wu, F.; Du, X.; Zhang, G. Cascade-SORT: A robust fruit counting approach using multiple features cascade matching. Comput. Electron. Agric. 2022, 200, 107223. [Google Scholar] [CrossRef]
- Tsai, C.-Y.; Su, Y.-K. MobileNet-JDE: A lightweight multi-object tracking model for embedded systems. Multimed. Tools Appl. 2022, 81, 9915–9937. [Google Scholar] [CrossRef]
- Sun, Y.; Yan, Y.; Zhao, J.; Cai, C. Research on Vision-based pedestrian detection and tracking algorithm. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, China, 7–10 August 2022; pp. 1021–1027. [Google Scholar] [CrossRef]
- Shahbazi, M.; Bayat, M.H.; Tarvirdizadeh, B. A motion model based on recurrent neural networks for visual object tracking. Image Vis. Comput. 2022, 126, 104533. [Google Scholar] [CrossRef]
- Gad, A.; Basmaji, T.; Yaghi, M.; Alheeh, H.; Alkhedher, M.; Ghazal, M. Multiple Object Tracking in Robotic Applications: Trends and Challenges. Appl. Sci. 2022, 12, 9408. [Google Scholar] [CrossRef]
- Brasó, G.; Cetintas, O.; Leal-Taixé, L. Multi-Object Tracking and Segmentation Via Neural Message Passing. Int. J. Comput. Vis. 2022, 130, 3035–3053. [Google Scholar] [CrossRef]
- Chen, J.; Wang, F.; Li, C.; Zhang, Y.; Ai, Y.; Zhang, W. Online Multiple Object Tracking Using a Novel Discriminative Module for Autonomous Driving. Electronics 2021, 10, 2479. [Google Scholar] [CrossRef]
- Xue, Y.; Ju, Z. Multiple pedestrian tracking under first-person perspective using deep neural network and social force optimization. Optik 2021, 240, 166981. [Google Scholar] [CrossRef]
- Li, B.; Fu, C.; Ding, F.; Ye, J.; Lin, F. All-day object tracking for unmanned aerial vehicle. IEEE Trans. Mob. Comput. 2022. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, Z.; Wu, J.; Tian, Y.; Tang, H.; Guo, X. Real-Time Vehicle Detection Based on Improved YOLO v5. Sustainability 2022, 14, 12274. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Roy, A.M.; Bose, R.; Bhaduri, J. A fast accurate fine-grain object detection model based on YOLOv4 deep neural network. Neural Comput. Applic. 2022, 34, 3895–3921. [Google Scholar] [CrossRef]
- Roy, A.M.; Bhaduri, J.; Kumar, T.; Raj, K. WilDect-YOLO: An efficient and robust computer vision-based accurate object localization model for automated endangered wildlife detection. Ecol. Inform. 2023, 75, 101919. [Google Scholar] [CrossRef]
- Welch, G.F. Kalman filter. In Computer Vision: A Reference Guide; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–3. [Google Scholar]
- Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.; Upcroft, B. Simple online and realtime tracking. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP 2016), Phoenix, AZ, USA, 25–28 September 2016; pp. 3464–3468. [Google Scholar] [CrossRef]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar] [CrossRef]
- Konstantinova, P.; Udvarev, A.; Semerdjiev, T. A Study of a Target Tracking Algorithm Using Global Nearest Neighbor Approach. In Proceedings of the 4th International Conference Conference on Computer Systems and Technologies: E-Learning, Rousse, Bulgaria, 19–20 June 2003; pp. 290–295. [Google Scholar] [CrossRef]
- Kirubarajan, T.; Bar-Shalom, Y. Probabilistic data association techniques for target tracking in clutter. Proc. IEEE 2004, 92, 536–557. [Google Scholar] [CrossRef]
- Gu, S.; Zheng, Y.; Tomasi, C. Efficient Visual Object Tracking with Online Nearest Neighbor Classifier. Comput. Vis. ACCV 2010, 2011, 271–282. [Google Scholar] [CrossRef]
- Jiang, Z.; Huynh, D.Q. Multiple Pedestrian Tracking from Monocular Videos in an Interacting Multiple Model Framework. IEEE Trans. Image Process. 2018, 27, 1361–1375. [Google Scholar] [CrossRef] [PubMed]
- Rezatofighi, S.H.; Milan, A.; Zhang, Z.; Shi, Q.; Dick, A.; Reid, I. Joint Probabilistic Data Association Revisited. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 3047–3055. [Google Scholar] [CrossRef]
- Kim, C.; Li, F.; Ciptadi, A.; Rehg, J.M. Multiple Hypothesis Tracking Revisited. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 4696–4704. [Google Scholar] [CrossRef]
- Carvalho, G.d.S. Kalman Filter-Based Object Tracking Techniques for Indoor Robotic Applications. Ph.D. Thesis, Universidade de Coimbra, Coimbra, Portugal, 2021. [Google Scholar]
- Milan, A.; Leal-Taixé, L.; Reid, I.; Roth, S.; Schindler, K. MOT16: A benchmark for multi-object tracking. arXiv 2016, arXiv:1603.00831. [Google Scholar] [CrossRef]
- Yadav, S.; Payandeh, S. Understanding Tracking Methodology of Kernelized Correlation Filter. In Proceedings of the 2018 IEEE 9th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 1–3 November 2018; pp. 1330–1336. [Google Scholar] [CrossRef]
- Ramalakshmi, V.; Alex, M.G. Visual object tracking using discriminative correlation filter. In Proceedings of the 2016 International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 21–22 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, S.; Yao, H.; Sun, X.; Lu, X. Sparse coding based visual tracking: Review and experimental comparison. Pattern Recognit. 2013, 46, 1772–1788. [Google Scholar] [CrossRef]
- Koller-Meier, E.B.; Ade, F. Tracking multiple objects using the Condensation algorithm. Robot. Auton. Syst. 2001, 34, 93–105. [Google Scholar] [CrossRef]
- Held, D.; Thrun, S.; Savarese, S. Learning to Track at 100 FPS with Deep Regression Networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 749–765. [Google Scholar] [CrossRef]
- Kocur, V.; Ftacnik, M. Multi-Class Multi-Movement Vehicle Counting Based on CenterTrack. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Nashville, TN, USA, 19–25 June 2021. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, C.; Wang, X.; Zeng, W.; Liu, W. FairMOT: On the Fairness of Detection and Re-identification in Multiple Object Tracking. Int. J. Comput. Vis. 2021, 129, 3069–3087. [Google Scholar] [CrossRef]
- Reid, D. An algorithm for tracking multiple targets. IEEE Trans. Autom. Control. 1979, 24, 843–854. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Y.; Nevatia, R. Global data association for multi-object tracking using network flows. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008. [Google Scholar] [CrossRef]
- Babenko, B.; Yang, M.-H.; Belongie, S. Visual tracking with online Multiple Instance Learning. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009. [Google Scholar] [CrossRef]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-Learning-Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1409–1422. [Google Scholar] [CrossRef]
- Wang, B.; Wang, G.; Chan, K.L.; Wang, L. Tracklet Association with Online Target-Specific Metric Learning. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014. [Google Scholar] [CrossRef]
- Zhu, J.; Yang, H.; Liu, N.; Kim, M.; Zhang, W.; Yang, M.-H. Online Multi-Object Tracking with Dual Matching Attention Networks. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2018; pp. 379–396. [Google Scholar] [CrossRef]
- Gordon, N.J.; Maskell, S.; Kirubarajan, T. Efficient particle filters for joint tracking and classification. In Proceedings of the Signal and Data Processing of Small Targets 2002, Orlando, FL, USA, 7 August 2002. [Google Scholar] [CrossRef]
- Vercauteren, T.; Guo, D.; Wang, X. Joint multiple target tracking and classification in collaborative sensor networks. In Proceedings of the International Symposium on Information Theory, 2004, ISIT, Chicago, IL, USA, 27 June–2 July 2004. [Google Scholar] [CrossRef]
- Wu, Z.; Thangali, A.; Sclaroff, S.; Betke, M. Coupling detection and data association for multiple object tracking. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012. [Google Scholar] [CrossRef]
- Wang, Y.; Kitani, K.; Weng, X. Joint Object Detection and Multi-Object Tracking with Graph Neural Networks. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar] [CrossRef]
- Gavrila, D.M.; Munder, S. Multi-cue Pedestrian Detection and Tracking from a Moving Vehicle. Int. J. Comput. Vis. 2006, 73, 41–59. [Google Scholar] [CrossRef]
- Breitenstein, M.D.; Reichlin, F.; Leibe, B.; Koller-Meier, E.; Van Gool, L. Online Multiperson Tracking-by-Detection from a Single, Uncalibrated Camera. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1820–1833. [Google Scholar] [CrossRef]
- Basso, F.; Munaro, M.; Michieletto, S.; Pagello, E.; Menegatti, E. Fast and Robust Multi-people Tracking from RGB-D Data for a Mobile Robot. Intell. Auton. Syst. 2013, 12, 265–276. [Google Scholar] [CrossRef]
- Thoreau, M.; Kottege, N. Deep Similarity Metric Learning for Real-Time Pedestrian Tracking. arXiv 2018, arXiv:1806.07592. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, X.; Gu, C. Online multi-object tracking with pedestrian re-identification and occlusion processing. Vis Comput. 2021, 37, 1089–1099. [Google Scholar] [CrossRef]
- Dutta, J.; Pal, S. A note on Hungarian method for solving assignment problem. J. Inf. Optim. Sci. 2015, 36, 451–459. [Google Scholar] [CrossRef]
- Korepanova, A.A.; Oliseenko, V.D.; Abramov, M.V. Applicability of similarity coefficients in social circle matching. In Proceedings of the 2020 XXIII International Conference on Soft Computing and Measurements (SCM), Saint Petersburg, Russia, 27–29 May 2020; pp. 41–43. [Google Scholar] [CrossRef]
- Vijaymeena, M.; Kavitha, K. A survey on similarity measures in text mining. Mach. Learn. Appl. Int. J. 2016, 3, 19–28. [Google Scholar] [CrossRef]
- Gragera, A.; Suppakitpaisarn, V. Semimetric Properties of Sørensen-Dice and Tversky Indexes. WALCOM Algorithms Comput. 2016, 9627, 339–350. [Google Scholar] [CrossRef]
- Pereira, R.; Carvalho, G.; Garrote, L.; Nunes, U.J. Sort and Deep-SORT Based Multi-Object Tracking for Mobile Robotics: Evaluation with New Data Association Metrics. Appl. Sci. 2022, 12, 1319. [Google Scholar] [CrossRef]
- Ristani, E.; Solera, F.; Zou, R.; Cucchiara, R.; Tomasi, C. Performance measures and a data set for multi-target, multi-camera tracking. Eur. Conf. Comput. Vis. 2016, 9914, 17–35. [Google Scholar] [CrossRef]
- Bernardin, K.; Stiefelhagen, R. Evaluating multiple object tracking performance: The clear mot metrics. EURASIP J. Image Video Process. 2008, 2008, 246309. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Cost Matrix | Evaluation Metrics | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IDF1↑ | IDP↑ | IDR↑ | Rcll↑ | Prcn↑ | FAR↓ | GT | MT↑ | PT | ML↓ | FP↓ | FN↓ | IDs↓ | FM↓ | MOTA↑ | MOTP↑ | MOTAL↑ | |
| IOU | 43.675 | 69.827 | 31.775 | 39.162 | 86.060 | 2.174 | 202 | 27 | 79 | 96 | 5010 | 48,048 | 247 | 730 | 32.506 | 79.756 | 32.815 |
| Sorensen | 43.727 | 69.877 | 31.819 | 39.172 | 86.025 | 2.181 | 202 | 27 | 81 | 94 | 5026 | 48,040 | 243 | 726 | 32.501 | 79.726 | 32.805 |
| Cosinei | 43.702 | 69.837 | 31.802 | 39.163 | 86.003 | 2.185 | 202 | 27 | 81 | 94 | 5034 | 48,047 | 242 | 721 | 32.483 | 79.728 | 32.786 |
| Overlap | 43.429 | 69.381 | 31.607 | 39.152 | 85.944 | 2.195 | 202 | 27 | 81 | 94 | 5057 | 48,056 | 250 | 724 | 32.432 | 79.738 | 32.746 |
| Overlapr | 43.659 | 69.793 | 31.765 | 39.168 | 86.059 | 2.175 | 202 | 27 | 80 | 95 | 5011 | 48,043 | 246 | 731 | 32.512 | 79.739 | 32.820 |
| Euclidean | 41.732 | 66.779 | 30.349 | 38.690 | 85.131 | 2.316 | 202 | 27 | 82 | 93 | 5337 | 48,421 | 368 | 762 | 31.466 | 79.849 | 31.929 |
| Manhattan | 42.038 | 67.254 | 30.575 | 38.668 | 85.057 | 2.329 | 202 | 27 | 81 | 94 | 5365 | 48,438 | 359 | 753 | 31.421 | 79.840 | 31.872 |
| Chebyshev | 42.429 | 67.754 | 30.885 | 38.815 | 85.150 | 2.320 | 202 | 27 | 82 | 93 | 5346 | 48,322 | 343 | 750 | 31.612 | 79.824 | 32.043 |
| Cosine | 40.278 | 64.542 | 29.273 | 38.380 | 84.620 | 2.391 | 202 | 27 | 79 | 96 | 5509 | 48,666 | 375 | 744 | 30.929 | 79.961 | 31.401 |
| R | 39.588 | 63.431 | 28.773 | 37.573 | 82.830 | 2.670 | 202 | 24 | 80 | 98 | 6151 | 49,303 | 523 | 873 | 29.122 | 79.824 | 29.781 |
| R1 | 39.974 | 64.111 | 29.040 | 37.701 | 83.231 | 2.604 | 202 | 25 | 81 | 96 | 5999 | 49,202 | 486 | 851 | 29.490 | 79.862 | 30.102 |
| R2 | 36.918 | 59.397 | 26.782 | 35.950 | 79.728 | 3.133 | 202 | 22 | 80 | 100 | 7219 | 50,585 | 665 | 956 | 25.967 | 79.994 | 26.805 |
| Cost Matrix | Evaluation Metrics | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IDF1↑ | IDP↑ | IDR↑ | Rcll↑ | Prcn↑ | FAR↓ | GT | MT↑ | PT | ML↓ | FP↓ | FN↓ | IDs↓ | FM↓ | MOTA↑ | MOTP↑ | MOTAL↑ | |
| C1 | 43.610 | 69.715 | 31.729 | 39.163 | 86.048 | 2.177 | 202 | 27 | 80 | 95 | 5015 | 48,047 | 249 | 732 | 32.498 | 79.732 | 32.810 |
| C2 | 43.663 | 69.798 | 31.767 | 39.171 | 86.065 | 2.174 | 202 | 27 | 80 | 95 | 5009 | 48,041 | 246 | 731 | 32.517 | 79.736 | 32.826 |
| C3 | 43.748 | 69.928 | 31.831 | 39.185 | 86.083 | 2.171 | 202 | 27 | 80 | 95 | 5003 | 48,030 | 253 | 731 | 32.530 | 79.729 | 32.847 |
| C4 | 43.675 | 69.830 | 31.774 | 39.208 | 86.167 | 2.158 | 202 | 27 | 79 | 96 | 4971 | 48,012 | 258 | 728 | 32.587 | 79.750 | 32.910 |
| C5 | 43.685 | 69.861 | 31.778 | 39.190 | 86.157 | 2.158 | 202 | 27 | 79 | 96 | 4973 | 48,026 | 266 | 730 | 32.556 | 79.755 | 32.890 |
| C6 | 43.389 | 69.351 | 31.570 | 39.171 | 86.048 | 2.177 | 202 | 27 | 80 | 95 | 5016 | 48,041 | 249 | 730 | 32.504 | 79.741 | 32.817 |
| C7 | 43.793 | 69.990 | 31.866 | 39.170 | 86.031 | 2.180 | 202 | 27 | 81 | 94 | 5023 | 48,042 | 243 | 727 | 32.502 | 79.727 | 32.807 |
| C8 | 43.727 | 69.877 | 31.819 | 39.172 | 86.025 | 2.181 | 202 | 27 | 81 | 94 | 5026 | 48,040 | 243 | 726 | 32.501 | 79.726 | 32.805 |
| C9 | 41.995 | 67.131 | 30.554 | 38.837 | 85.328 | 2.289 | 202 | 26 | 83 | 93 | 5274 | 48,305 | 320 | 731 | 31.754 | 79.722 | 32.156 |
| C10 | 41.363 | 66.262 | 30.066 | 38.171 | 84.124 | 2.469 | 202 | 25 | 82 | 95 | 5689 | 48,831 | 428 | 784 | 30.425 | 79.862 | 30.964 |
| C11 | 42.498 | 67.872 | 30.933 | 38.842 | 85.225 | 2.308 | 202 | 27 | 82 | 93 | 5318 | 48,301 | 334 | 753 | 31.685 | 79.795 | 32.105 |
| C12 | 43.727 | 69.875 | 31.819 | 39.172 | 86.022 | 2.182 | 202 | 27 | 81 | 94 | 5027 | 48,040 | 243 | 726 | 32.499 | 79.726 | 32.804 |
| C13 | 43.611 | 69.702 | 31.733 | 39.170 | 86.036 | 2.179 | 202 | 27 | 80 | 95 | 5021 | 48,042 | 247 | 732 | 32.499 | 79.730 | 32.809 |
| C14 | 43.702 | 69.837 | 31.802 | 39.163 | 86.003 | 2.185 | 202 | 27 | 81 | 94 | 5034 | 48,047 | 242 | 721 | 32.483 | 79.728 | 32.786 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Razzok, M.; Badri, A.; El Mourabit, I.; Ruichek, Y.; Sahel, A. Pedestrian Detection and Tracking System Based on Deep-SORT, YOLOv5, and New Data Association Metrics. Information 2023, 14, 218. https://doi.org/10.3390/info14040218
Razzok M, Badri A, El Mourabit I, Ruichek Y, Sahel A. Pedestrian Detection and Tracking System Based on Deep-SORT, YOLOv5, and New Data Association Metrics. Information. 2023; 14(4):218. https://doi.org/10.3390/info14040218
Chicago/Turabian StyleRazzok, Mohammed, Abdelmajid Badri, Ilham El Mourabit, Yassine Ruichek, and Aïcha Sahel. 2023. "Pedestrian Detection and Tracking System Based on Deep-SORT, YOLOv5, and New Data Association Metrics" Information 14, no. 4: 218. https://doi.org/10.3390/info14040218
APA StyleRazzok, M., Badri, A., El Mourabit, I., Ruichek, Y., & Sahel, A. (2023). Pedestrian Detection and Tracking System Based on Deep-SORT, YOLOv5, and New Data Association Metrics. Information, 14(4), 218. https://doi.org/10.3390/info14040218