

Neural Network-Based Solar Irradiance Forecast for Edge Computing Devices

 ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
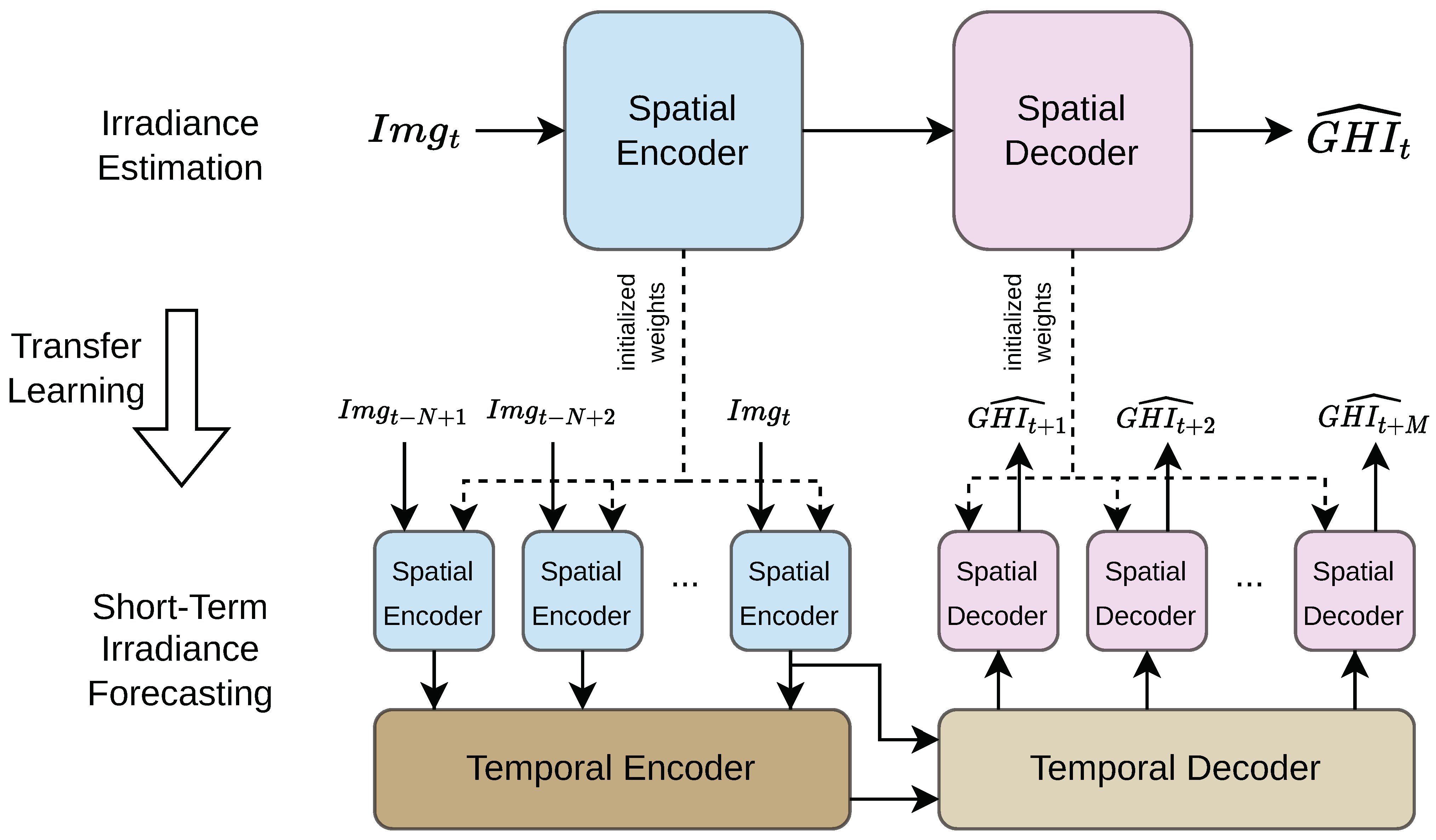
2.1. Model Structure
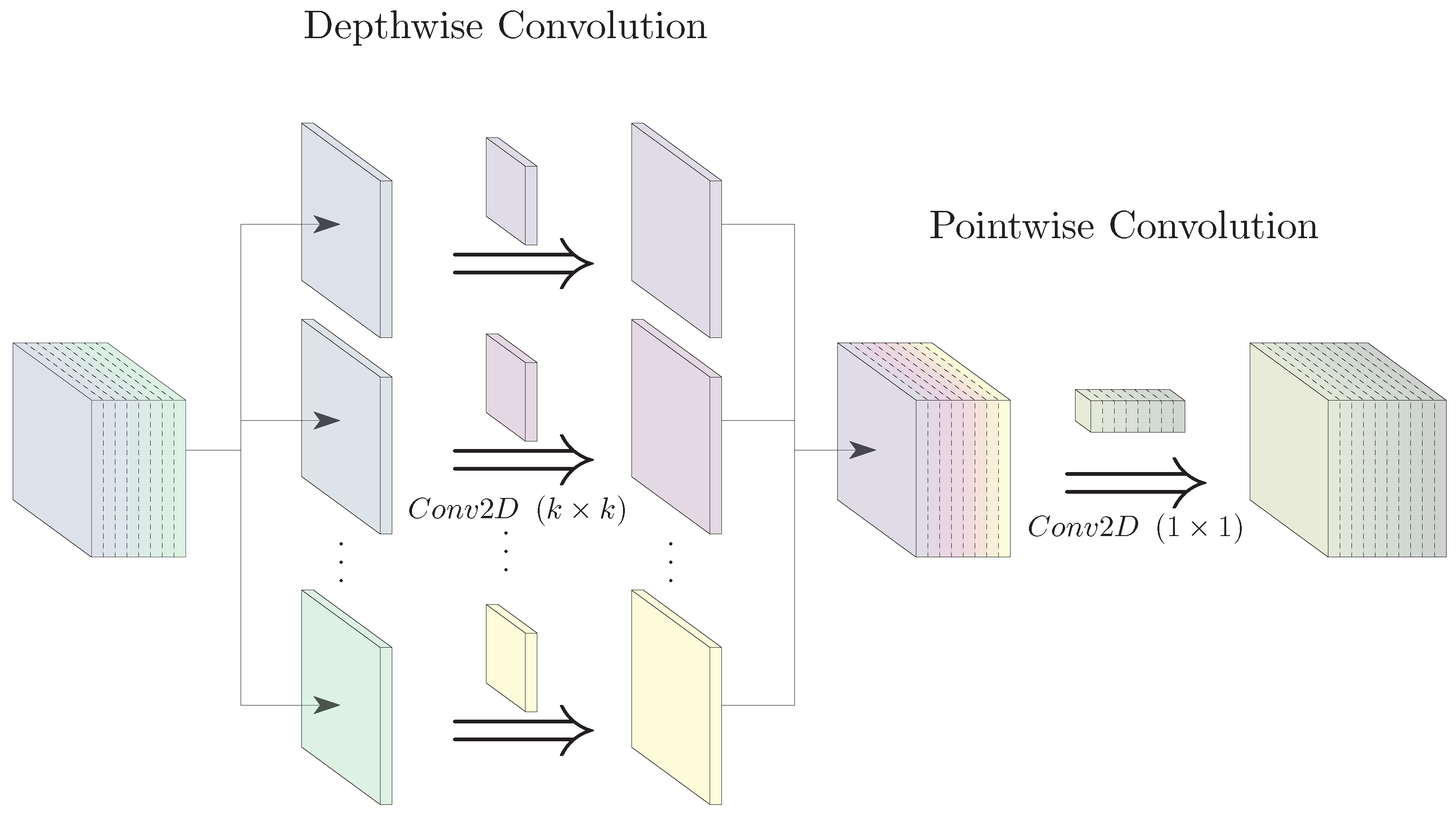
2.1.1. Xception Layer
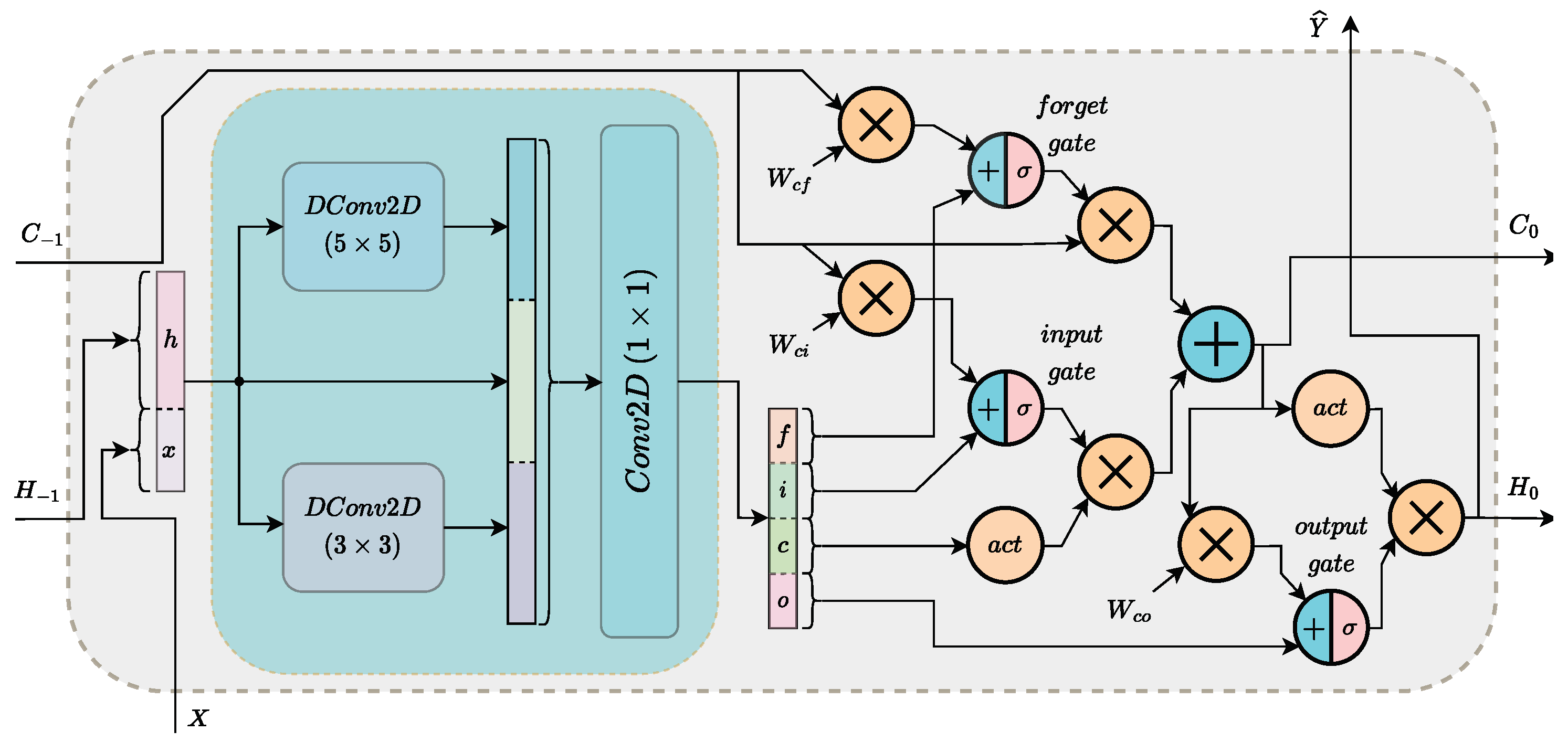
2.1.2. XceptionLSTM
- Parallelized execution of multiple ConvLSTM cells with different kernel sizes in a single XceptionLSTM cell.
- Significantly more lightweight when compared to the ConvLSTMs that have similar structural elements.
- Improved utilization of the data and kernel tensors: k times less input data calls in the depthwise convolution and times less kernel calls in the pointwise convolution when compared to traditional convolutions, where k is the number of kernels and w is the window size of the tradithonal CL.
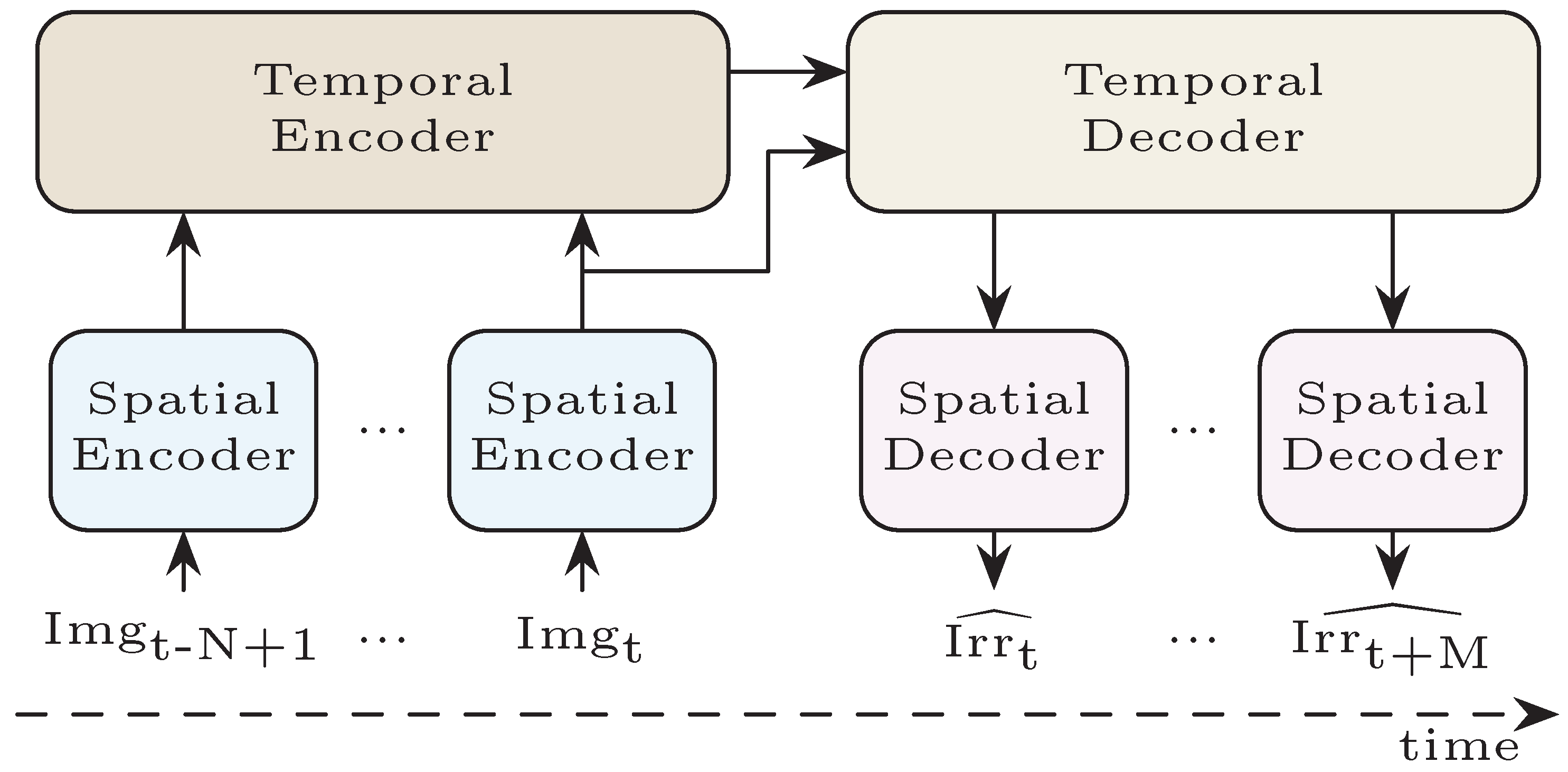
2.1.3. Proposed Model
2.2. Dataset
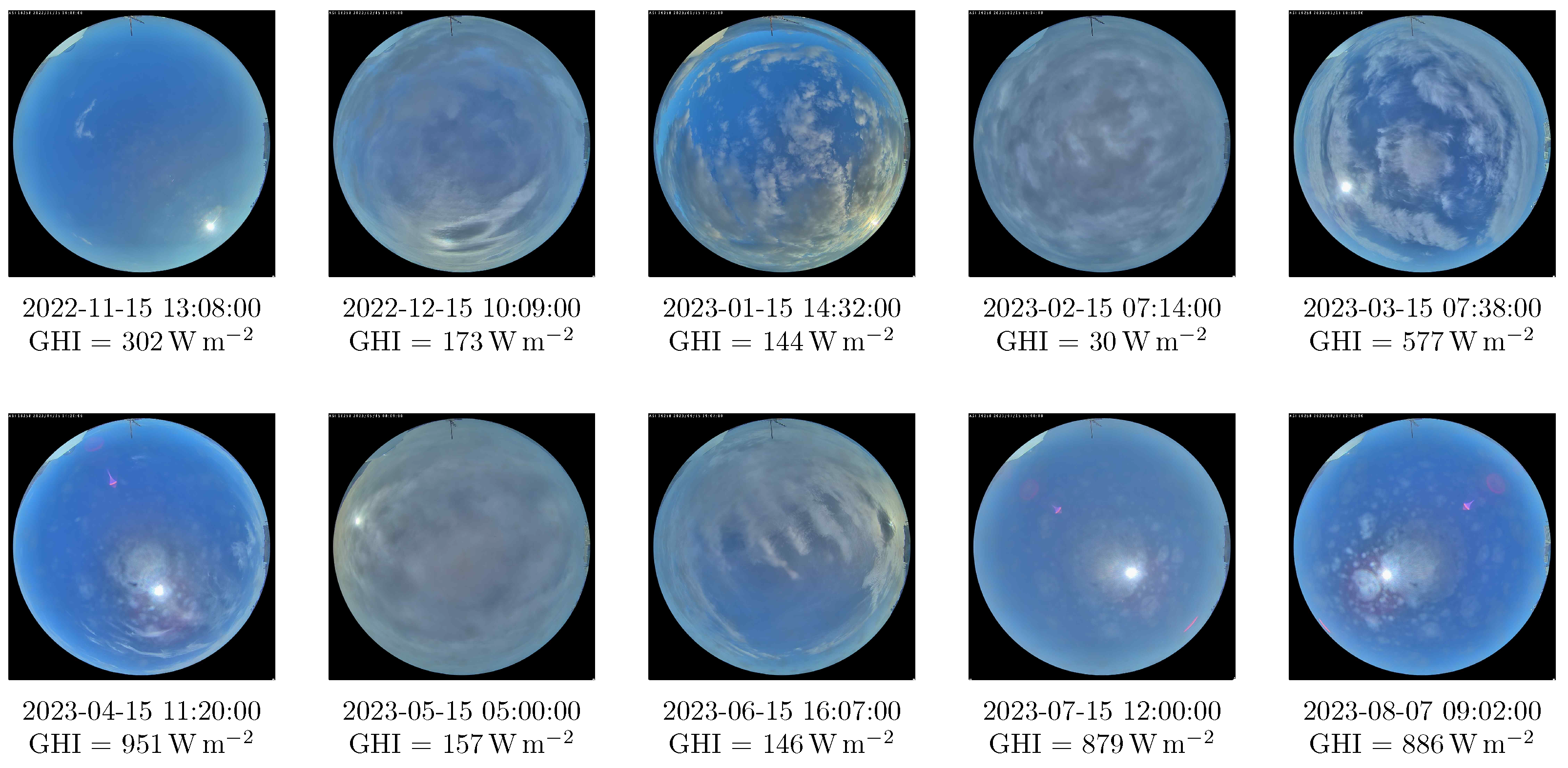
2.2.1. Input Images
2.2.2. Output Irradiance
2.3. Metrics
3. Results
3.1. Training Scheme
3.2. Model Evaluation
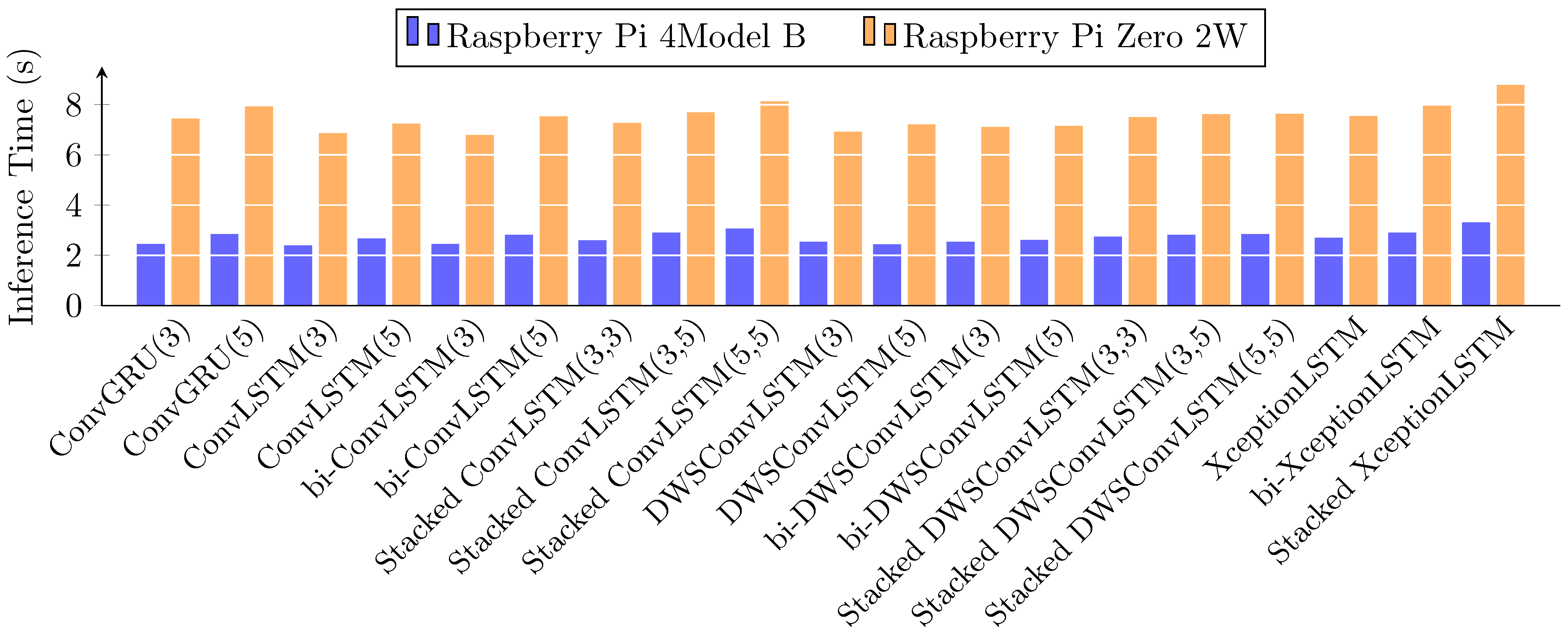
3.3. Timing Reports
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AI | Artificial intelligence |
| ANN | Artificial neural network |
| CC | Cloud cover |
| CL | Convolutional layer |
| CNN | Convolutional neural network |
| ConvLSTM | Convolutional long short-term memory |
| ConvGRU | Convolutional gated recurrent unit |
| CPU | Central processing unit |
| CSI | Clear sky index |
| DBN | Deep belief network |
| DL | Deep learning |
| DHI | Diffuse horizontal irradiance |
| DNI | Direct normal irradiance |
| DRL | Deep reinforcement learning |
| DWSC | Depthwise separable convolution |
| DWSConvLSTM | Depthwise separable convolutional long short-term memory |
| FC-LSTM | Fully connected long short-term memory |
| FPGA | Field programmable gate array |
| FS | Forecast skill |
| GHI | Global horizontal irradiance |
| GPU | Graphics processing unit |
| GRU | Gated recurrent unit |
| IFS | Irradiance forecasting system |
| IoT | Internet of Things |
| LeakyReLU | Leaky rectified linear unit |
| LSTM | Long short-term memory |
| MAE | Mean absolute error |
| MBE | Mean bias error |
| ML | Machine learning |
| MLP | Multilayer perceptron |
| NLP | Natural language processing |
| NN | Neural network |
| PV | Photovoltaic |
| ReLU | Rectified linear unit |
| RES | Renewable energy source |
| RGB | Red green blue |
| RMSE | Root mean square error |
| RNN | Recurrent neural network |
| Seq2Seq | Sequence-to-sequence |
| SG | Smart grid |
| SoC | System-on-chip |
| VLSI | Very large-scale integration |
| XceptionLSTM | Xception long short-term memory |
| XL | Xception layer |
References
- Molinara, M.; Bria, A.; De Vito, S.; Marrocco, C. Artificial intelligence for distributed smart systems. Pattern Recognit. Lett. 2021, 142, 48–50. [Google Scholar] [CrossRef]
- Aguilar, J.; Garces-Jimenez, A.; R-Moreno, M.; García, R. A systematic literature review on the use of artificial intelligence in energy self-management in smart buildings. Renew. Sustain. Energy Rev. 2021, 151, 111530. [Google Scholar] [CrossRef]
- Alahi, M.E.E.; Sukkuea, A.; Tina, F.W.; Nag, A.; Kurdthongmee, W.; Suwannarat, K.; Mukhopadhyay, S.C. Integration of IoT-Enabled Technologies and Artificial Intelligence (AI) for Smart City Scenario: Recent Advancements and Future Trends. Sensors 2023, 23, 5206. [Google Scholar] [CrossRef]
- Jiao, J. Application and prospect of artificial intelligence in smart grid. IOP Conf. Ser. Earth Environ. Sci. 2020, 510, 022012. [Google Scholar] [CrossRef]
- Khandakar, A.E.H.; Chowdhury, M.; Khoda Kazi, M.; Benhmed, K.; Touati, F.; Al-Hitmi, M.; Gonzales, A.S.P., Jr. Machine Learning Based Photovoltaics (PV) Power Prediction Using Different Environmental Parameters of Qatar. Energies 2019, 12, 2782. [Google Scholar] [CrossRef]
- Diagne, M.; David, M.; Lauret, P.; Boland, J.; Schmutz, N. Review of solar irradiance forecasting methods and a proposition for small-scale insular grids. Renew. Sustain. Energy Rev. 2013, 27, 65–76. [Google Scholar] [CrossRef]
- Ma, N.; Zhang, X.; Zheng, H.T.; Sun, J. ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design. In Computer Vision—ECCV 2018, Proceedings of the 15th European Conference, Munich, Germany, 8–14 September 2018; Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y., Eds.; Springer: Cham, Switzerland, 2018; pp. 122–138. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.G.; Zhu, M.; Zhmoginov, A.; Chen, L. MobileNetV2: Inverted Residuals and Linear Bottlenecks. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2018, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4510–4520. [Google Scholar] [CrossRef]
- Archon Project. Available online: http://archonproject.eu/english.html (accessed on 29 August 2023).
- Ziyabari, S.; Du, L.; Biswas, S.K. Multibranch Attentive Gated ResNet for Short-Term Spatio-Temporal Solar Irradiance Forecasting. IEEE Trans. Ind. Appl. 2022, 58, 28–38. [Google Scholar] [CrossRef]
- Chollet, F. Xception: Deep Learning with Depthwise Separable Convolutions. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, Honolulu, HI, USA, 21–26 July 2017; pp. 1800–1807. [Google Scholar] [CrossRef]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In Advances in Neural Information Processing Systems 32; Curran Associates, Inc.: Red Hook, NY, USA, 2019; pp. 8024–8035. [Google Scholar] [CrossRef]
- Holmgren, W.F.; Hansen, C.W.; Mikofski, M.A. pvlib python: A python package for modeling solar energy systems. J. Open Source Softw. 2018, 3, 884. [Google Scholar] [CrossRef]
- Papatheofanous, E.A.; Kalekis, V.; Venitourakis, G.; Tziolos, F.; Reisis, D. Deep Learning-Based Image Regression for Short-Term Solar Irradiance Forecasting on the Edge. Electronics 2022, 11, 3794. [Google Scholar] [CrossRef]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2016, Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar] [CrossRef]
- Kaiser, L.; Gomez, A.N.; Chollet, F. Depthwise Separable Convolutions for Neural Machine Translation. In Proceedings of the 6th International Conference on Learning Representations, ICLR 2018, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar] [CrossRef]
- Basodi, S.; Ji, C.; Zhang, H.; Pan, Y. Gradient amplification: An efficient way to train deep neural networks. Big Data Min. Anal. 2020, 3, 196–207. [Google Scholar] [CrossRef]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A.A. Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; Singh, S., Markovitch, S., Eds.; AAAI Press: NW Washington, DC, USA, 2017; pp. 4278–4284. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.; Wong, W.; Woo, W. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. In Advances in Neural Information Processing Systems 28, Proceedings of the Annual Conference on Neural Information Processing Systems 2015, Montreal, QC, Canada, 7–12 December 2015; Cortes, C., Lawrence, N.D., Lee, D.D., Sugiyama, M., Garnett, R., Eds.; MIT Press: Cambridge, MA, USA, 2015; pp. 802–810. [Google Scholar] [CrossRef]
- Staudemeyer, R.C.; Morris, E.R. Understanding LSTM—A tutorial into Long Short-Term Memory Recurrent Neural Networks. arXiv 2019, arXiv:1909.09586. [Google Scholar]
- Young, T.; Hazarika, D.; Poria, S.; Cambria, E. Recent Trends in Deep Learning Based Natural Language Processing. IEEE Comput. Intell. Mag. 2018, 13, 55–75. [Google Scholar] [CrossRef]
- Zhang, X.; Liang, X.; Zhiyuli, A.; Zhang, S.; Xu, R.; Wu, B. AT-LSTM: An Attention-based LSTM Model for Financial Time Series Prediction. IOP Conf. Ser. Mater. Sci. Eng. 2019, 569, 052037. [Google Scholar] [CrossRef]
- Ghany, K.K.A.; Zawbaa, H.M.; Sabri, H.M. COVID-19 prediction using LSTM algorithm: GCC case study. Inform. Med. Unlocked 2021, 23, 100566. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Dong, H.; El-Saddik, A. Deep Learning in Next-Frame Prediction: A Benchmark Review. IEEE Access 2020, 8, 69273–69283. [Google Scholar] [CrossRef]
- Lin, C.W.; Lin, M.; Yang, S. SOPNet Method for the Fine-Grained Measurement and Prediction of Precipitation Intensity Using Outdoor Surveillance Cameras. IEEE Access 2020, 8, 188813–188824. [Google Scholar] [CrossRef]
- Pedro, H.T.C.; Larson, D.P.; Coimbra, C.F.M. A comprehensive dataset for the accelerated development and benchmarking of solar forecasting methods. J. Renew. Sustain. Energy 2019, 11, 036102. [Google Scholar] [CrossRef]
- Xie, W.; Liu, D.; Yang, M.; Chen, S.; Wang, B.; Wang, Z.; Xia, Y.; Liu, Y.; Wang, Y.; Zhang, C. SegCloud: A novel cloud image segmentation model using a deep convolutional neural network for ground-based all-sky-view camera observation. Atmos. Meas. Tech. 2020, 13, 1953–1961. [Google Scholar] [CrossRef]
- Krauz, L.; Janout, P.; Blažek, M.; Páta, P. Assessing Cloud Segmentation in the Chromacity Diagram of All-Sky Images. Remote Sens. 2020, 12, 1902. [Google Scholar] [CrossRef]
- Nie, Y.; Li, X.; Scott, A.; Sun, Y.; Venugopal, V.; Brandt, A. 2017–2019 Sky Images and Photovoltaic Power Generation Dataset for Short-Term Solar Forecasting (Stanford Benchmark); Stanford Digital Repository: Stanford, CA, USA, 2022. [Google Scholar] [CrossRef]
- Stoffel, T.; Andreas, A. NREL Solar Radiation Research Laboratory (SRRL): Baseline Measurement System (BMS); NREL: Golden, CO, USA, 1981. [CrossRef]
- Chu, Y.; Li, M.; Coimbra, C.F.; Feng, D.; Wang, H. Intra-hour irradiance forecasting techniques for solar power integration: A review. iScience 2021, 24, 103136. [Google Scholar] [CrossRef]
- Marquez, R.; Coimbra, C.F.M. Proposed Metric for Evaluation of Solar Forecasting Models. J. Sol. Energy Eng. 2012, 135, 011016. [Google Scholar] [CrossRef]
- Ballas, N.; Yao, L.; Pal, C.; Courville, A.C. Delving Deeper into Convolutional Networks for Learning Video Representations. In Proceedings of the 4th International Conference on Learning Representations, ICLR 2016, San Juan, Puerto Rico, 2–4 May 2016; Conference Track Proceedings. Bengio, Y., LeCun, Y., Eds.; arXiv: Ithaca, NY, USA, 2016. [Google Scholar] [CrossRef]
- Miller, S.D.; Rogers, M.A.; Haynes, J.M.; Sengupta, M.; Heidinger, A.K. Short-term solar irradiance forecasting via satellite/model coupling. Solar Energy 2018, 168, 102–117. [Google Scholar] [CrossRef]
- Ayet, A.; Tandeo, P. Nowcasting solar irradiance using an analog method and geostationary satellite images. Solar Energy 2018, 164, 301–315. [Google Scholar] [CrossRef]
- Ordoñez Palacios, L.E.; Bucheli Guerrero, V.; Ordoñez, H. Machine Learning for Solar Resource Assessment Using Satellite Images. Energies 2022, 15, 3985. [Google Scholar] [CrossRef]
- Boussif, O.; Boukachab, G.; Assouline, D.; Massaroli, S.; Yuan, T.; Benabbou, L.; Bengio, Y. What if We Enrich day-ahead Solar Irradiance Time Series Forecasting with Spatio-Temporal Context? arXiv 2023, arXiv:2306.01112. [Google Scholar]
- Nie, Y.; Li, X.; Paletta, Q.; Aragon, M.; Scott, A.; Brandt, A. Open-Source Ground-based Sky Image Datasets for Very Short-term Solar Forecasting, Cloud Analysis and Modeling: A Comprehensive Survey. arXiv 2022, arXiv:2211.14709. [Google Scholar]
- Juncklaus Martins, B.; Cerentini, A.; Mantelli, S.L.; Loureiro Chaves, T.Z.; Moreira Branco, N.; von Wangenheim, A.; Rüther, R.; Marian Arrais, J. Systematic review of nowcasting approaches for solar energy production based upon ground-based cloud imaging. Sol. Energy Adv. 2022, 2, 100019. [Google Scholar] [CrossRef]
- Kumari, P.; Toshniwal, D. Deep learning models for solar irradiance forecasting: A comprehensive review. J. Clean. Prod. 2021, 318, 128566. [Google Scholar] [CrossRef]
- Kumar, D.S.; Yagli, G.M.; Kashyap, M.; Srinivasan, D. Solar irradiance resource and forecasting: A comprehensive review. IET Renew. Power Gener. 2020, 14, 1641–1656. [Google Scholar] [CrossRef]
- Rajagukguk, R.A.; Kamil, R.; Lee, H.J. A Deep Learning Model to Forecast Solar Irradiance Using a Sky Camera. Appl. Sci. 2021, 11, 5049. [Google Scholar] [CrossRef]
- Paletta, Q.; Hu, A.; Arbod, G.; Lasenby, J. ECLIPSE: Envisioning Cloud Induced Perturbations in Solar Energy. arXiv 2021, arXiv:2104.12419. [Google Scholar] [CrossRef]
- Nie, Y.; Paletta, Q.; Scott, A.; Pomares, L.M.; Arbod, G.; Sgouridis, S.; Lasenby, J.; Brandt, A. Sky-image-based solar forecasting using deep learning with multi-location data: Training models locally, globally or via transfer learning? arXiv 2022, arXiv:2211.02108. [Google Scholar]
- Park, S.; Kim, Y.; Ferrier, N.J.; Collis, S.M.; Sankaran, R.; Beckman, P.H. Prediction of Solar Irradiance and Photovoltaic Solar Energy Product Based on Cloud Coverage Estimation Using Machine Learning Methods. Atmosphere 2021, 12, 395. [Google Scholar] [CrossRef]
- Manandhar, P.; Temimi, M.; Aung, Z. Short-term solar radiation forecast using total sky imager via transfer learning. Energy Rep. 2023, 9, 819–828. [Google Scholar] [CrossRef]
- Zhang, J.; Verschae, R.; Nobuhara, S.; Lalonde, J.F. Deep photovoltaic nowcasting. Solar Energy 2018, 176, 267–276. [Google Scholar] [CrossRef]
- Sun, Y.; Venugopal, V.; Brandt, A.R. Short-term solar power forecast with deep learning: Exploring optimal input and output configuration. Solar Energy 2019, 188, 730–741. [Google Scholar] [CrossRef]
- Ajith, M.; Martínez-Ramón, M. Deep learning based solar radiation micro forecast by fusion of infrared cloud images and radiation data. Appl. Energy 2021, 294, 117014. [Google Scholar] [CrossRef]
- Bamisile, O.; Cai, D.; Oluwasanmi, A.; Ejiyi, C.; Ukwuoma, C.C.; Ojo, O.; Mukhtar, M.; Huang, Q. Comprehensive assessment, review, and comparison of AI models for solar irradiance prediction based on different time/estimation intervals. Sci. Rep. 2022, 12, 9644. [Google Scholar] [CrossRef] [PubMed]
- Lyu, C.; Eftekharnejad, S.; Basumallik, S.; Xu, C. Dynamic Feature Selection for Solar Irradiance Forecasting Based on Deep Reinforcement Learning. IEEE Trans. Ind. Appl. 2023, 59, 533–543. [Google Scholar] [CrossRef]
- Paletta, Q.; Lasenby, J. Convolutional Neural Networks applied to sky images for short-term solar irradiance forecasting. arXiv 2020, arXiv:2005.11246. [Google Scholar]
- Mercier, T.M.; Rahman, T.; Sabet, A. Solar Irradiance Anticipative Transformer. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2023—Workshops, Vancouver, BC, Canada, 17–24 June 2023; pp. 2065–2074. [Google Scholar] [CrossRef]
- Choi, M.; Rachunok, B.; Nateghi, R. Short-term solar irradiance forecasting using convolutional neural networks and cloud imagery. Environ. Res. Lett. 2021, 16, 044045. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temporal Model | Kernel Size | Temporal Encoder/Decoder | Spatio-Temporal Encoder/Decoder | Training Time per Epoch (min) | ||
|---|---|---|---|---|---|---|
| Param. | OPs (MAC) | Param. | OPs (MAC) | |||
| Spatial Encoder | - | - | - | 833 K | 1.03 G | 3.26 |
| Spatial Decoder | - | - | - | 658 K | 0.66 M | |
| ConvGRU | 3 | 1.79 M | 1.13 G | 3.90 M | 6.27 G | 19.16 |
| 5 | 4.93 M | 3.15 G | 7.05 M | 8.28 G | 20.54 | |
| ConvLSTM | 3 | 2.43 M | 1.51 G | 4.94 M | 6.65 G | 19.33 |
| 5 | 6.62 M | 4.19 G | 9.13 M | 9.33 G | 20.79 | |
| bi-ConvLSTM | 3 | 4.85 M | 1.89 G | 6.80 M | 7.02 G | 20.89 |
| 5 | 13.2 M | 5.24 G | 15.8 M | 10.4 G | 21.68 | |
| Stacked ConvLSTM | 3, 3 | 6.06 M | 3.02 G | 8.57 M | 8.16 G | 21.67 |
| 12.3 M | 5.71 G | 14.9 M | 10.8 G | 23.54 | ||
| 16.5 M | 8.39 G | 19.1 M | 13.5 G | 25.45 | ||
| DWSConvLSTM | 3 | 334 K | 172 M | 2.85 M | 5.31 G | 19.66 |
| 5 | 342 K | 177 M | 2.85 M | 5.31 G | 19.73 | |
| bi- DWSConvLSTM | 3 | 668 K | 215 M | 3.18 M | 5.35 G | 20.13 |
| 5 | 684 K | 221 M | 3.20 M | 5.36 G | 20.23 | |
| Stacked DWSConvLSTM | 826 K | 343 M | 3.34 M | 5.48 G | 20.64 | |
| 839 K | 349 M | 3.35 M | 5.49 G | 20.75 | ||
| 847 K | 354 M | 3.36 M | 5.49 G | 20.87 | ||
| XceptionLSTM | XL | 871 K | 516 M | 3.38 M | 5.65 G | 19.63 |
| bi-XceptionLSTM | XL | 1.74 M | 645 M | 4.25 M | 5.78 G | 19.75 |
| Stacked XceptionLSTM | XL | 2.17 M | 1.03 G | 4.68 M | 6.17 G | 20.79 |
| Hyperparameter | Tested Options | Final |
|---|---|---|
| Input Sequence Length | {5, 10, 15} | 5 |
| Output Sequence Length | {5, 10, 15} | 15 |
| Image Frame Size | {64, 128, 256} | 128 |
| Concatenate Sunmask | {True, False} | True |
| Removed Foreign Objects | {True, False} | True |
| Encoded State’s Channels | {16, 32, 64, 128, 256} | 128 |
| Optimizer | {Adam, RMSProp} | RMSProp |
| Scheduler | Exponential | |
| Learning Rate | 1st Stage: 2nd Stage: | |
| Loss Function | MSE Loss | |
| Batch Size | {8, 12, 16, 20, 24} | 16 |
| Model | Kernel Size | MBE (W m) | MAE (W m) | MAPE (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 min | 5 min | 15 min | Mean | 1 min | 5 min | 15 min | Mean | 1 min | 5 min | ||
| Persistence | – | <0.025 | −0.0841 | 0.1795 | <0.001 | 20.61 | 44.1 | 74.8 | 52.9 | 6.21 | 15.89 |
| ConvGRU | 3 | −3.19 | 9.63 | 9.09 | 8.83 | 34.6 | 47.2 | 59.6 | 50.4 | 24.66 | 32.5 |
| 5 | −1.508 | 7.86 | 8.17 | 7.52 | 33.0 | 46.2 | 59.0 | 49.7 | 22.72 | 29.34 | |
| ConvLSTM | 3 | −0.686 | 5.68 | 3.82 | 3.60 | 33.1 | 47.0 | 59.6 | 49.9 | 21.41 | 27.73 |
| 5 | 2.080 | 1.898 | −1.321 | 0.1465 | 33.0 | 47.1 | 60.9 | 50.8 | 21.73 | 27.87 | |
| bi-ConvLSTM | 3 | 3.02 | 2.520 | <0.025 | 0.1741 | 34.1 | 49.2 | 63.3 | 53.5 | 19.89 | 26.69 |
| 5 | −4.24 | −5.07 | −7.30 | −6.10 | 34.3 | 47.4 | 60.0 | 50.8 | 19.91 | 24.87 | |
| Stacked ConvLSTM | 3.10 | 3.26 | 1.304 | 1.741 | 33.5 | 47.3 | 59.5 | 50.3 | 22.08 | 29.31 | |
| 0.2465 | 0.313 | −4.12 | −1.500 | 33.0 | 47.0 | 60.0 | 50.4 | 21.49 | 27.68 | ||
| −2.170 | −1.474 | −4.08 | −2.824 | 35.0 | 47.7 | 59.9 | 51.0 | 19.76 | 26.35 | ||
| DWSConvLSTM | 3 | −14.13 | −5.37 | −2.234 | −4.49 | 35.5 | 46.6 | 59.8 | 50.3 | 22.11 | 27.69 |
| 5 | −11.49 | −5.97 | −3.01 | −4.75 | 34.8 | 46.3 | 59.0 | 49.8 | 21.56 | 26.20 | |
| bi- DWSConvLSTM | 3 | −15.90 | −5.63 | 0.988 | −3.94 | 37.0 | 46.0 | 58.5 | 49.5 | 22.71 | 26.88 |
| 5 | 3.54 | 3.81 | −4.48 | 1.335 | 34.5 | 46.6 | 60.1 | 50.1 | 23.07 | 28.81 | |
| Stacked DWSConvLSTM | 3, 3 | −6.38 | 0.678 | 2.481 | 1.022 | 35.0 | 46.4 | 58.5 | 49.6 | 23.14 | 29.92 |
| −8.51 | −3.71 | 1.160 | −1.831 | 34.7 | 45.4 | 58.3 | 49.0 | 20.60 | 26.18 | ||
| 1.994 | 0.452 | −6.07 | −1.518 | 34.5 | 46.7 | 59.6 | 50.1 | 23.01 | 28.48 | ||
| XceptionLSTM | XL | −3.01 | 1.139 | −4.87 | −0.924 | 32.5 | 46.1 | 59.9 | 49.7 | 20.46 | 24.43 |
| bi-XceptionLSTM | XL | −7.03 | −2.992 | −8.16 | −4.52 | 32.7 | 45.7 | 59.0 | 49.2 | 19.57 | 22.98 |
| Stacked XceptionLSTM | XL | −2.650 | −0.963 | −3.35 | −1.657 | 33.0 | 45.8 | 60.4 | 49.9 | 19.38 | 23.27 |
| RMSE (W m−2) | FS (%) | MAPE (%) | |||||||||
| 1 min | 5 min | 15 min | Mean | 1 min | 5 min | 15 min | Mean | 15 min | Mean | ||
| Persistence | – | 75.2 | 113.3 | 146.6 | 122.4 | – | – | – | – | 38.5 | 30.7 |
| ConvGRU | 3 | 69.4 | 94.8 | 113.1 | 99.9 | 7.70 | 16.37 | 22.88 | 17.77 | 38.5 | 30.7 |
| 5 | 68.3 | 95.4 | 114.6 | 100.0 | 9.12 | 15.77 | 21.83 | 17.74 | 36.8 | 31.4 | |
| ConvLSTM | 3 | 69.5 | 95.5 | 114.5 | 100.0 | 7.50 | 15.69 | 21.92 | 17.67 | 38.5 | 30.7 |
| 5 | 70.0 | 98.2 | 116.2 | 102.1 | 6.94 | 13.34 | 20.75 | 15.93 | 37.2 | 30.5 | |
| bi-ConvLSTM | 3 | 70.2 | 96.5 | 115.5 | 101.3 | 6.61 | 14.85 | 21.22 | 16.58 | 33.2 | 28.38 |
| 5 | 70.1 | 95.9 | 115.6 | 100.9 | 6.79 | 15.36 | 21.13 | 16.94 | 31.1 | 26.53 | |
| Stacked ConvLSTM | 69.7 | 96.3 | 115.1 | 100.7 | 7.27 | 15.06 | 21.47 | 17.09 | 36.7 | 31.0 | |
| 70.2 | 97.8 | 116.5 | 102.2 | 6.67 | 13.66 | 20.52 | 15.87 | 34.3 | 29.43 | ||
| 70.7 | 96.5 | 115.0 | 101.1 | 5.93 | 14.88 | 21.56 | 16.72 | 31.9 | 27.64 | ||
| DWSConvLSTM | 3 | 72.2 | 96.7 | 117.0 | 101.7 | 3.96 | 14.65 | 20.17 | 16.15 | 37.6 | 30.5 |
| 5 | 71.4 | 95.2 | 115.2 | 100.3 | 5.02 | 15.97 | 21.39 | 17.31 | 34.9 | 28.99 | |
| bi- DWSConvLSTM | 3 | 72.3 | 95.0 | 115.1 | 100.0 | 3.79 | 16.14 | 21.50 | 17.51 | 35.7 | 29.55 |
| 5 | 71.0 | 95.7 | 114.8 | 100.2 | 5.57 | 15.57 | 21.71 | 17.37 | 38.8 | 31.6 | |
| Stacked DWSConvLSTM | 73.3 | 95.9 | 113.7 | 100.3 | 2.51 | 15.38 | 22.43 | 17.16 | 36.7 | 31.8 | |
| 72.1 | 95.2 | 114.3 | 100.0 | 4.09 | 16.01 | 22.01 | 17.55 | 35.2 | 28.72 | ||
| 71.1 | 95.5 | 114.4 | 100.2 | 5.41 | 15.71 | 21.99 | 17.42 | 39.4 | 31.4 | ||
| XceptionLSTM | XL | 68.8 | 94.6 | 116.0 | 99.8 | 8.53 | 16.52 | 20.88 | 17.85 | 32.3 | 27.09 |
| bi-XceptionLSTM | XL | 68.7 | 94.5 | 117.3 | 100.3 | 8.52 | 16.57 | 20.01 | 17.52 | 28.91 | 24.50 |
| Stacked XceptionLSTM | XL | 69.2 | 94.4 | 115.8 | 99.8 | 7.94 | 16.69 | 21.04 | 17.85 | 31.3 | 25.66 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Venitourakis, G.; Vasilakis, C.; Tsagkaropoulos, A.; Amrou, T.; Konstantoulakis, G.; Golemis, P.; Reisis, D. Neural Network-Based Solar Irradiance Forecast for Edge Computing Devices. Information 2023, 14, 617. https://doi.org/10.3390/info14110617
Venitourakis G, Vasilakis C, Tsagkaropoulos A, Amrou T, Konstantoulakis G, Golemis P, Reisis D. Neural Network-Based Solar Irradiance Forecast for Edge Computing Devices. Information. 2023; 14(11):617. https://doi.org/10.3390/info14110617
Chicago/Turabian StyleVenitourakis, Georgios, Christoforos Vasilakis, Alexandros Tsagkaropoulos, Tzouma Amrou, Georgios Konstantoulakis, Panagiotis Golemis, and Dionysios Reisis. 2023. "Neural Network-Based Solar Irradiance Forecast for Edge Computing Devices" Information 14, no. 11: 617. https://doi.org/10.3390/info14110617
APA StyleVenitourakis, G., Vasilakis, C., Tsagkaropoulos, A., Amrou, T., Konstantoulakis, G., Golemis, P., & Reisis, D. (2023). Neural Network-Based Solar Irradiance Forecast for Edge Computing Devices. Information, 14(11), 617. https://doi.org/10.3390/info14110617