
Vehicle Routing Optimization for Non-Profit Organization Systems


Abstract
:1. Introduction
- To investigate efficient routing modules suitable for the VRP.
- To improve the system’s performance by using effective fleet management.
- To minimize the route cost and time.
2. Vehicle Routing Problem (VRP)
3. Implementation of the Proposed System on Ekram
3.1. Overview of the Ekram Problem
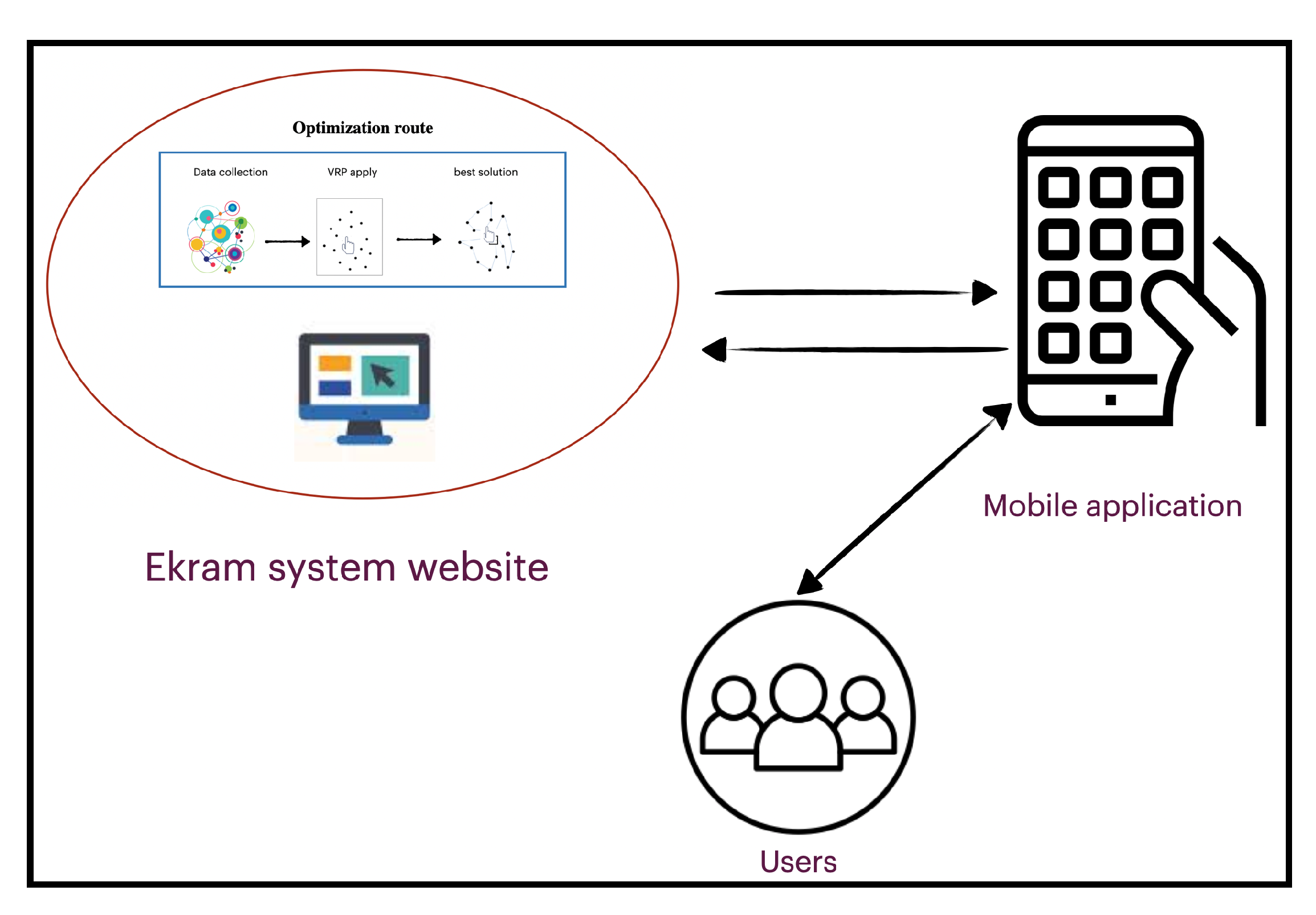
- Mobile application: The application is intended to communicate with users (receiving orders) and vehicle drivers (sending to orders) with simple interfaces.
- Website: The website through which the organization manages, schedules orders and vehicles, and designs the route plan for each vehicle.
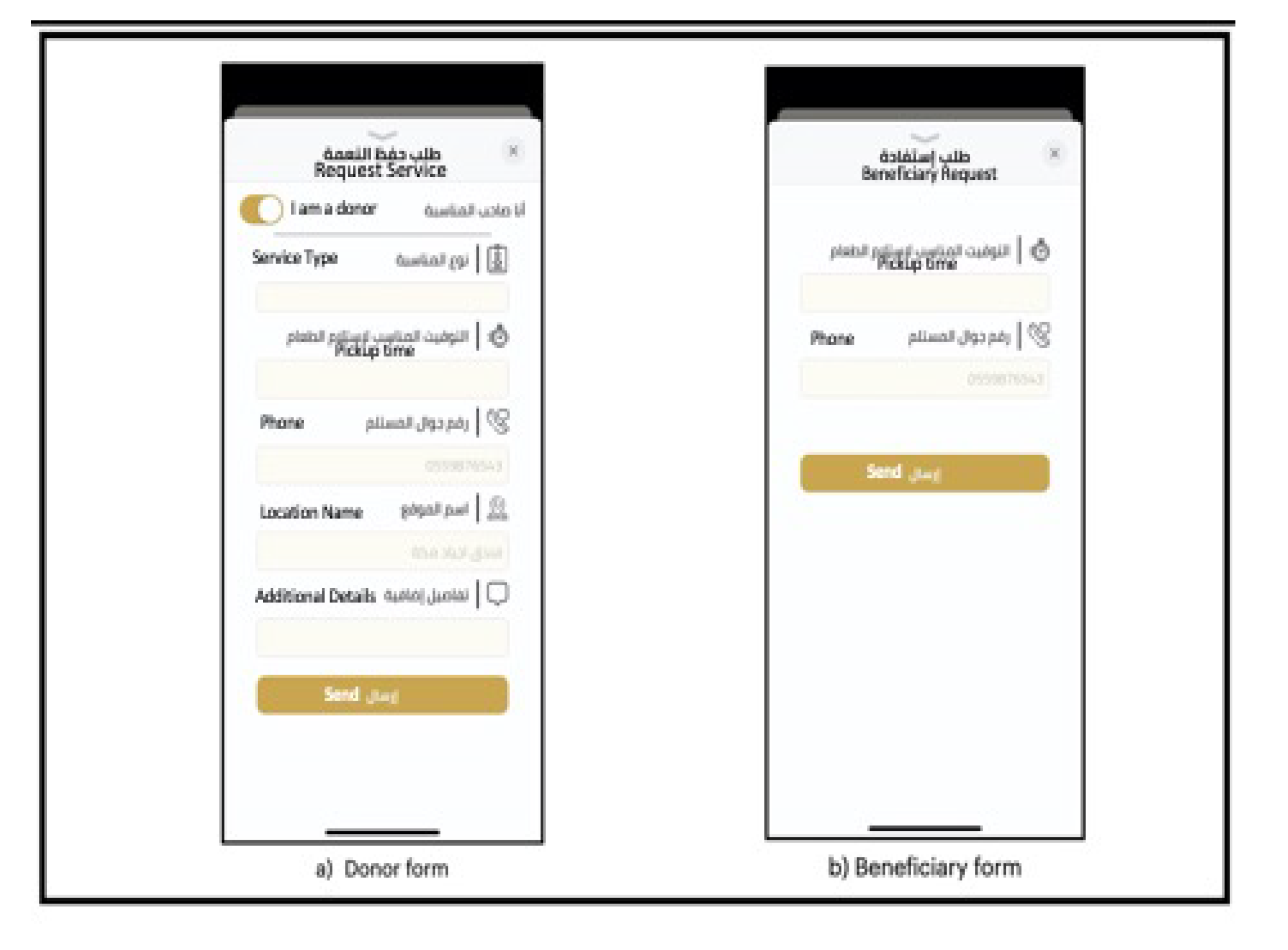
- The user determines the type of order (donor/receiver).
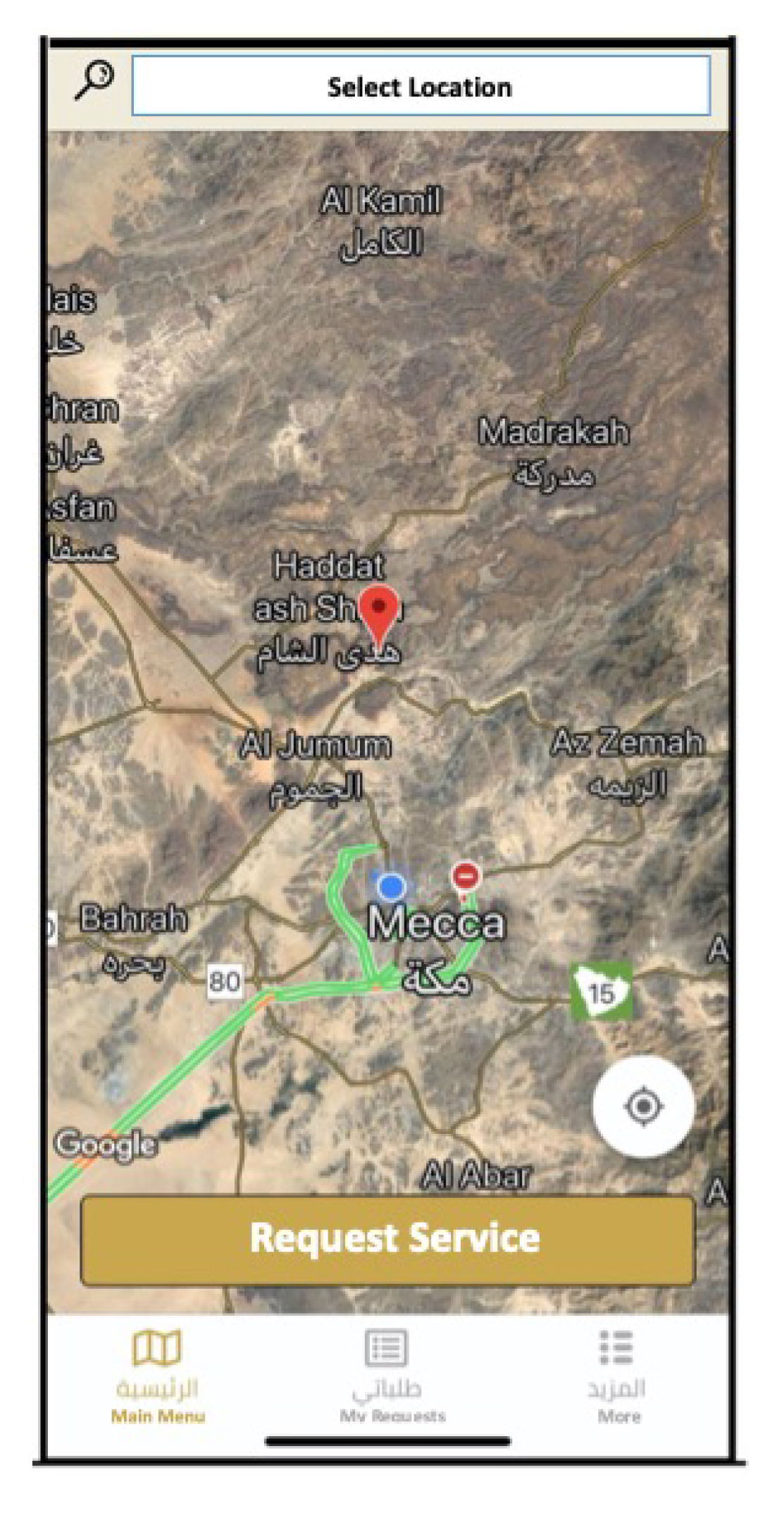
- The user determines their location via the Google map interface (Figure 1).
- Then a form is completed by filling in the required information (Figure 2).
- After submitting the request, the employee responsible for managing the requests through the website forwards the request to the vehicle operator through the application, and the driver makes the decision of whether to accept the request based on several factors, such as their current location and capacity of the vehicle.
- After accepting the request, the vehicle is sent to the user and ends with the return of the vehicle to the warehouse.
3.2. Steps to Apply the VRP System on Ekram
- The user determines the type of order (donor/receiver).
- The user determines their location via the Google map interface.
- Then the user fills out the required details to complete the application.
- The application is then submitted as a request from the user to the system. Once the application is submitted, the optimization process of Figure 3 is applied:
- (a)
- The system collects the required data including the location of the user, amount of food donated, the number of available vehicles, location and capacity of each vehicle, and delivery time requested.
- (b)
- The system then executes the proposed algorithms on the given data; the algorithms find the best solution “best route” and then terminate.
- (c)
- Once the the best solution is obtained, the system sends notifications simultaneously through the mobile application. One notification is sent to the driver that contains the route to be followed and the order details. Another notification is sent to the user that contains the type of delivery vehicle and expected time of arrival.
3.3. Application of the VRP Algorithm
3.3.1. Greedy Search Algorithm
3.3.2. Intraroute Heuristic Neighborhood Search
3.3.3. Interroute Heuristic Neighborhood Search
3.3.4. Tabu Search Algorithm
4. Simulation Results
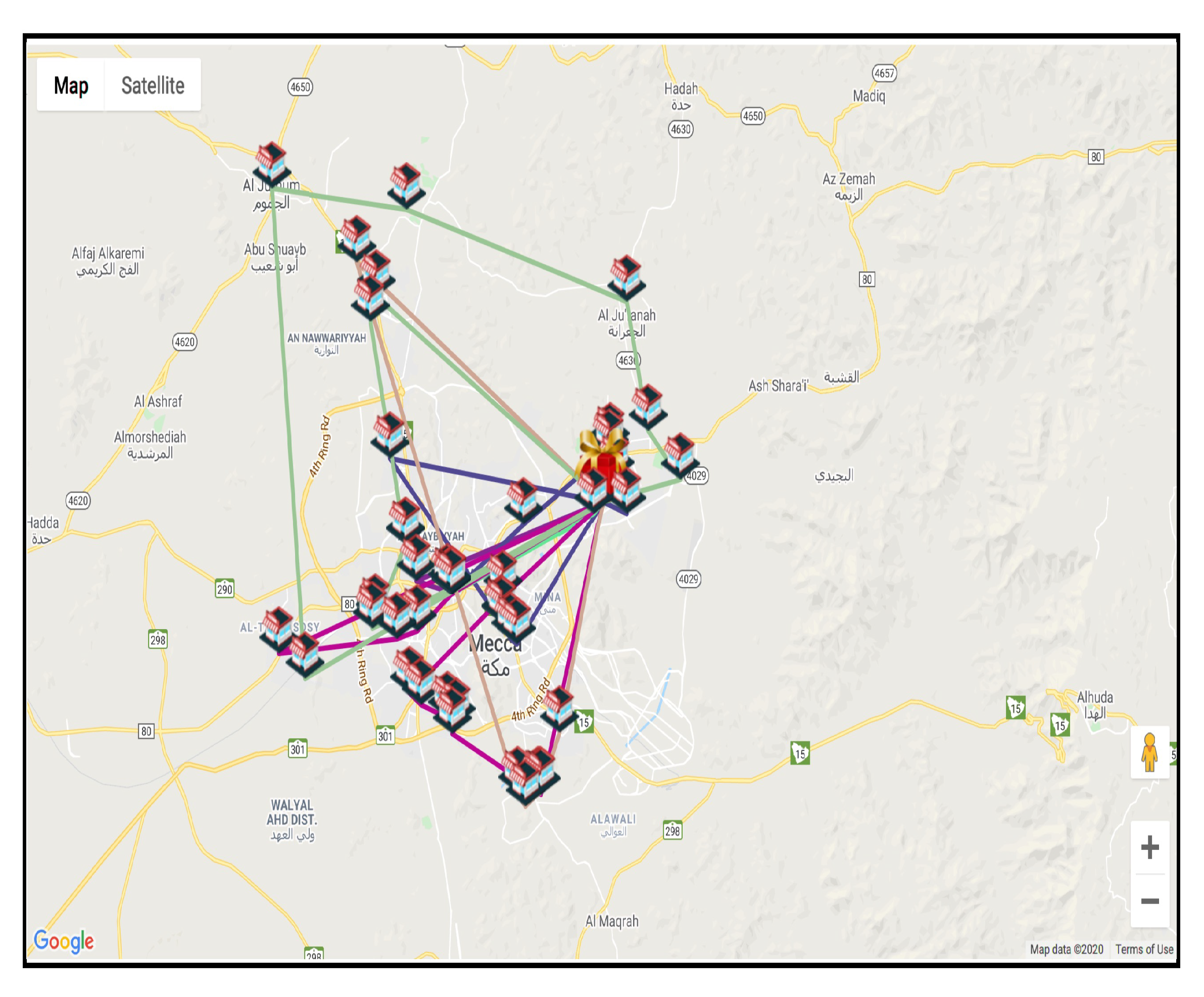
4.1. Proposed System Results
- The start and end must be at the depot.
- Exactly one vehicle is required to visit each single customer.
- The quantity L is associated with the total demand of any route.
- The total routing cost must be minimized.
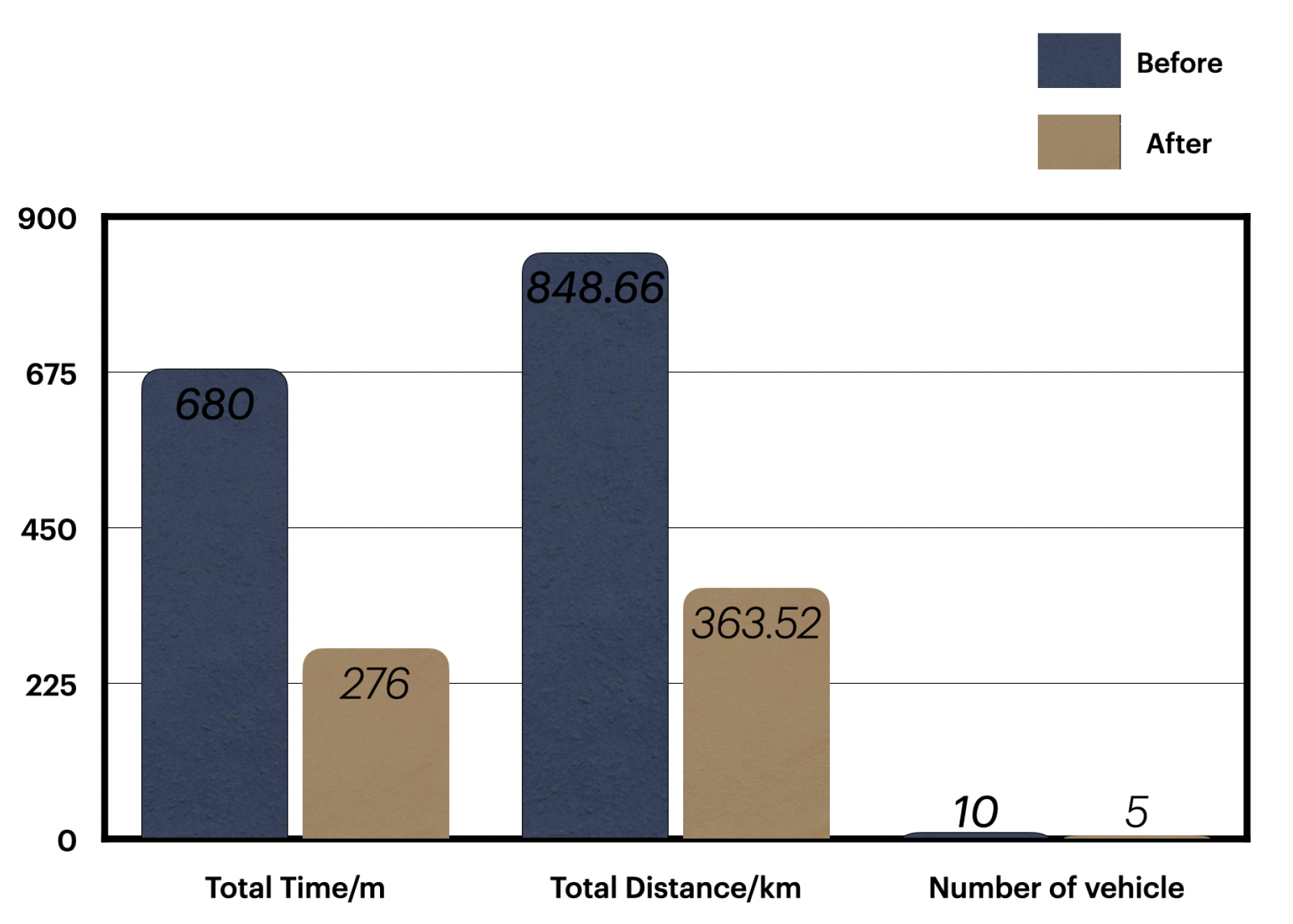
4.2. Comparison with the CVRPTW System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Behnassi, M.; Pollmann, O.; Gupta, H. Climate Change, Food Security and Natural Resource Management: Regional Case Studies from Three Continents; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Baig, M.B.; Al-Zahrani, K.H.; Schneider, F.; Straquadine, G.S.; Mourad, M. Food waste posing a serious threat to sustainability in the Kingdom of Saudi Arabia–A systematic review. Saudi J. Biol. Sci. 2019, 26, 1743–1752. [Google Scholar] [CrossRef] [PubMed]
- Li, X. Capacitated Vehicle Routing Problem with Time Windows: A Case Study on Pickup of Dietary Products in Nonprofit Organization; Arizona State University: Tempe, AZ, USA, 2015. [Google Scholar]
- Prescott-Gagnon, E.; Desaulniers, G.; Rousseau, L.M. A branch-and-price-based large neighborhood search algorithm for the vehicle routing problem with time windows. Netw. Int. J. 2009, 54, 190–204. [Google Scholar] [CrossRef]
- Kallehauge, B.; Larsen, J.; Madsen, O.B.; Solomon, M.M. Vehicle Routing Problem with Time Windows. In Column Generation; Desaulniers, G., Desrosiers, J., Solomon, M.M., Eds.; Springer: Boston, MA, USA, 2005; pp. 67–98. [Google Scholar] [CrossRef]
- Hsu, C.I.; Hung, S.F.; Li, H.C. Vehicle routing problem with time-windows for perishable food delivery. J. Food Eng. 2007, 80, 465–475. [Google Scholar] [CrossRef]
- Amorim, P.; Almada-Lobo, B. The impact of food perishability issues in the vehicle routing problem. Comput. Ind. Eng. 2014, 67, 223–233. [Google Scholar] [CrossRef]
- Kopfer, H.W.; Kopfer, H.; Wang, X. Limit and Degree of Autonomy in Groupage Systems: Challenges, Chances and Barriers for Horizontal Cooperation in Operational Transportation Planning. In Autonomous Cooperation and Control in Logistics; Springer: Berlin/Heidelberg, Germany, 2011; pp. 61–75. [Google Scholar]
- Motoyama, Y.; Knowlton, K. Examining the connections within the startup ecosystem: A case study of St. Louis. Entrep. Res. J. 2017, 7. [Google Scholar] [CrossRef]
- Lei, H.; Laporte, G.; Guo, B. A generalized variable neighborhood search heuristic for the capacitated vehicle routing problem with stochastic service times. Top 2012, 20, 99–118. [Google Scholar] [CrossRef]
- Belhaiza, S.; M’Hallah, R.; Brahim, G.B. A new hybrid genetic variable neighborhood search heuristic for the vehicle routing problem with multiple time windows. In Proceedings of the 2017 IEEE Congress on Evolutionary Computation (CEC), Donostia, Spain, 5–8 June 2017; pp. 1319–1326. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Route | Travel Time (min) | Load | Donors |
|---|---|---|---|
| 1 | 109 | 39,200 | 14 |
| 2 | 161 | 39,200 | 14 |
| 3 | 130 | 36,400 | 13 |
| 4 | 114 | 36,400 | 13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alhindi, A.; Alsaidi, A.; Munshi, A. Vehicle Routing Optimization for Non-Profit Organization Systems. Information 2022, 13, 374. https://doi.org/10.3390/info13080374
Alhindi A, Alsaidi A, Munshi A. Vehicle Routing Optimization for Non-Profit Organization Systems. Information. 2022; 13(8):374. https://doi.org/10.3390/info13080374
Chicago/Turabian StyleAlhindi, Ahmad, Abrar Alsaidi, and Amr Munshi. 2022. "Vehicle Routing Optimization for Non-Profit Organization Systems" Information 13, no. 8: 374. https://doi.org/10.3390/info13080374
APA StyleAlhindi, A., Alsaidi, A., & Munshi, A. (2022). Vehicle Routing Optimization for Non-Profit Organization Systems. Information, 13(8), 374. https://doi.org/10.3390/info13080374