
Optimal Energy Management Scheme of Battery Supercapacitor-Based Bidirectional Converter for DC Microgrid Applications



Abstract
:1. Introduction
- ▪
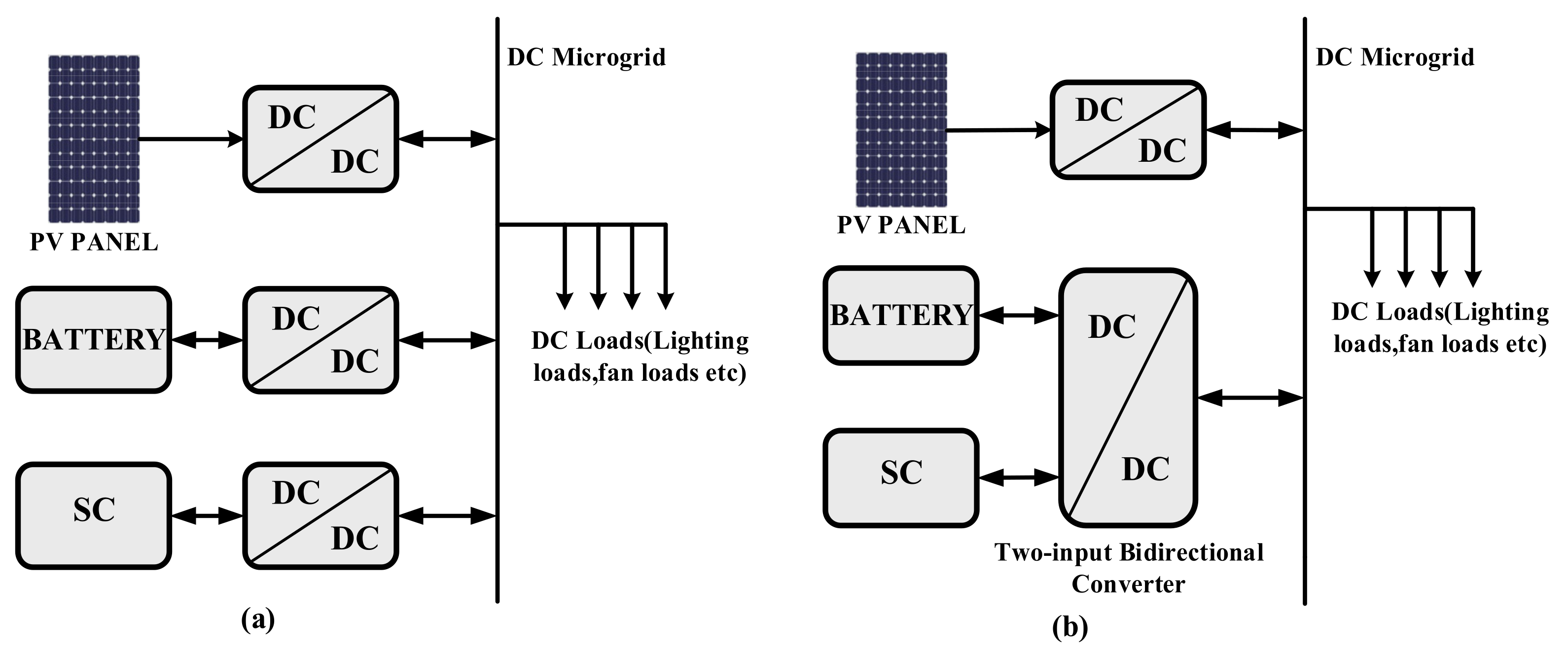
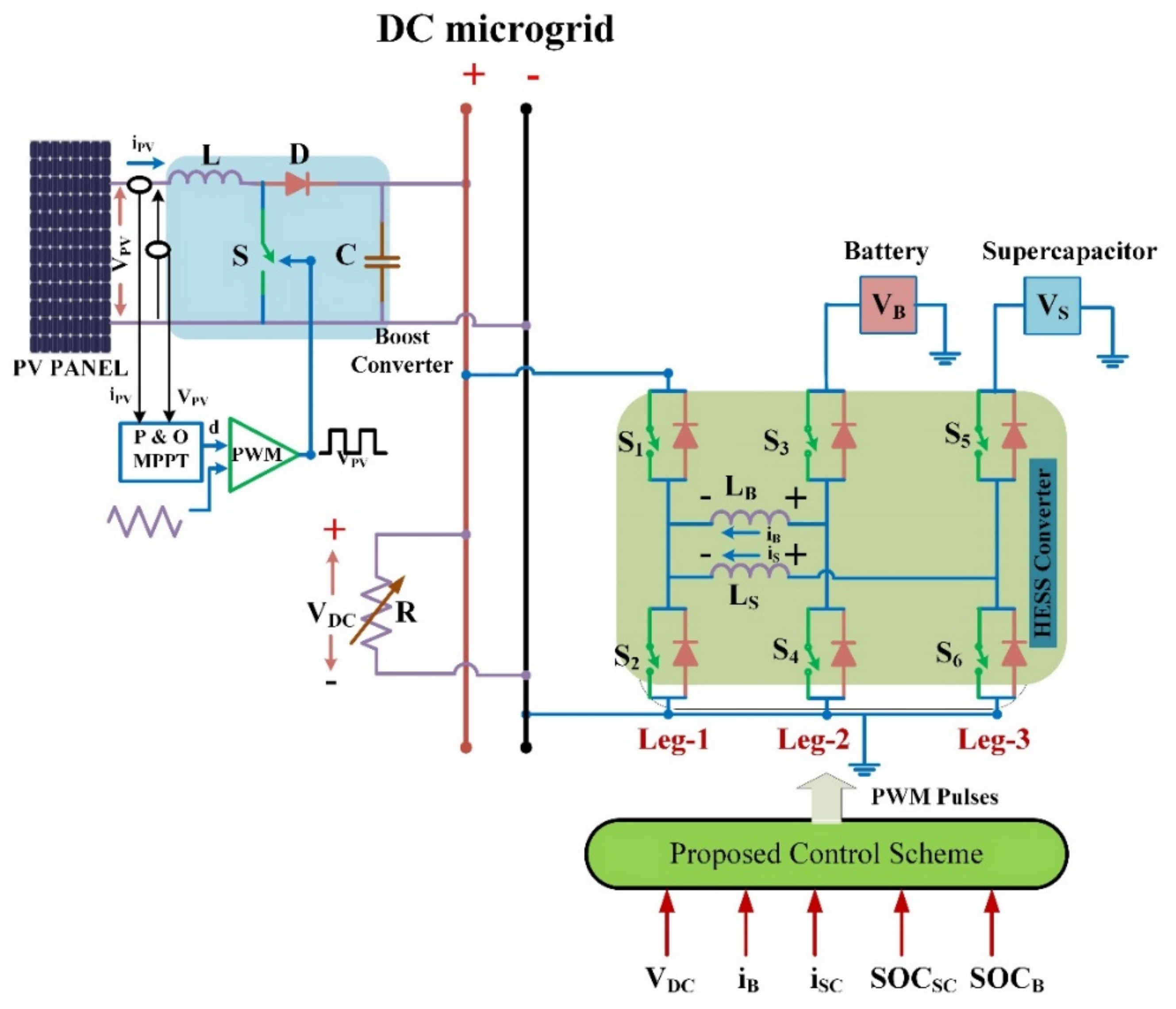
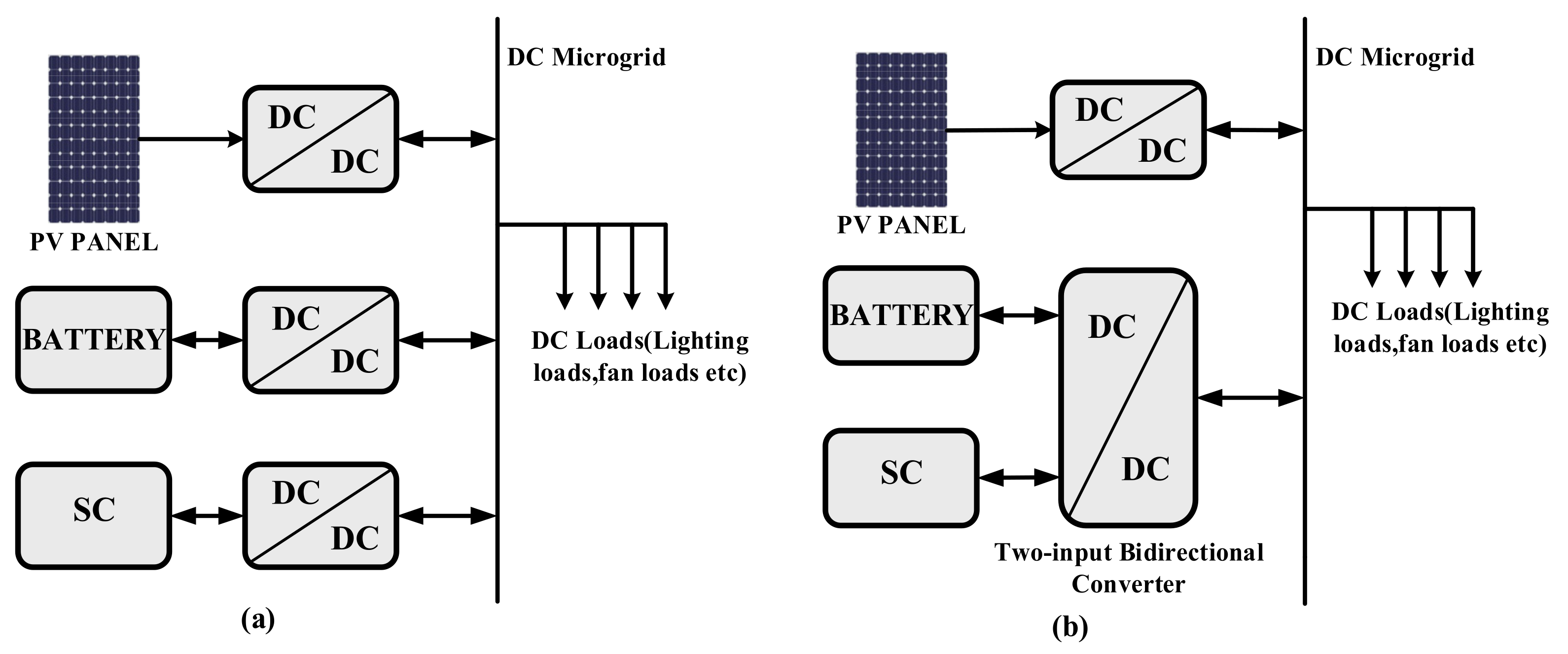
- This research work proposes a DC Microgrid voltage stabilization based on multi-input converters.
- ▪
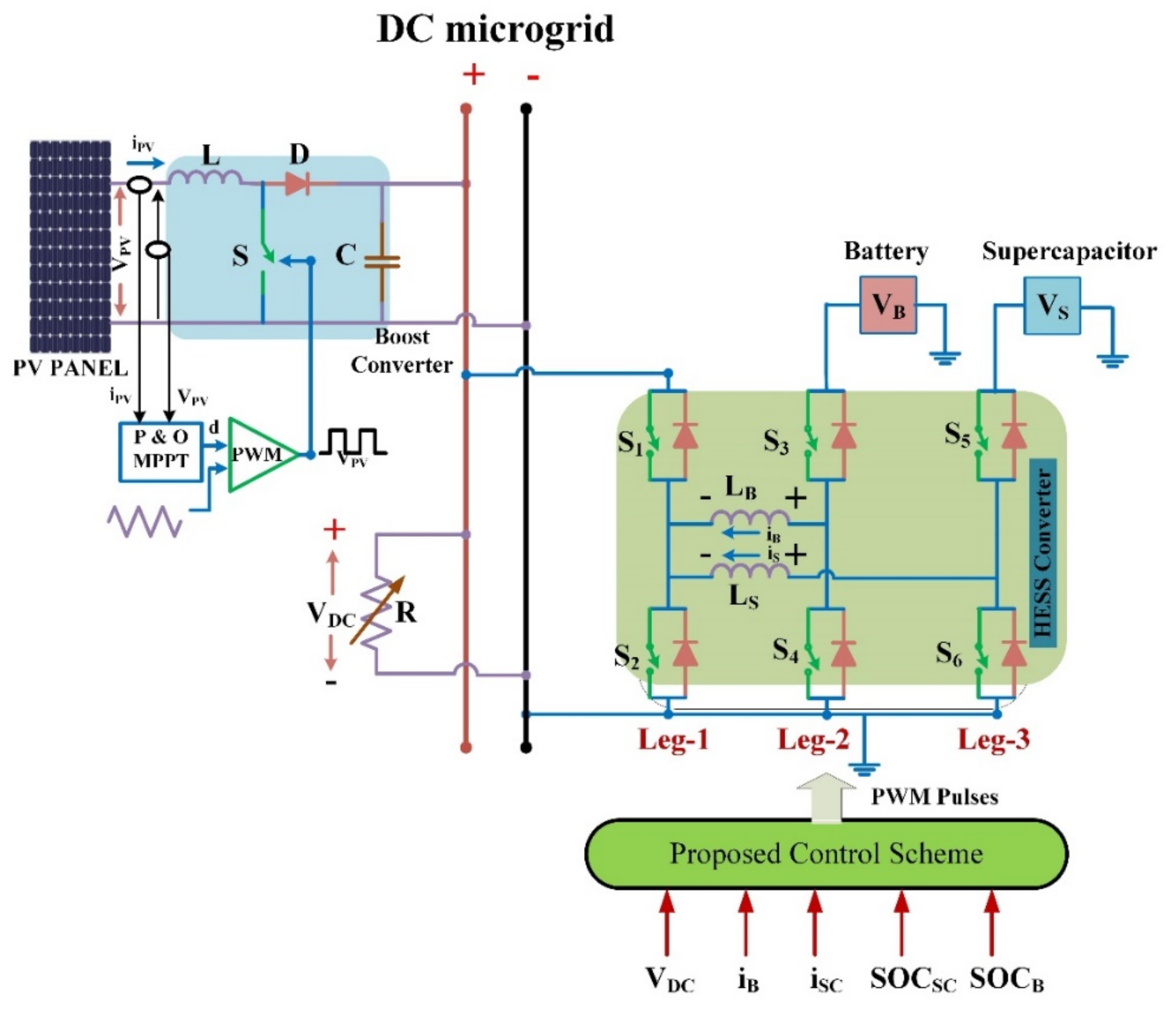
- A comprehensive controller is introduced for the design and analysis of a HESS-based multiple-input bidirectional converter. For a multi-input converter, the small-signal model-based-provided controller ensures stability in all working areas.
- ▪
- The execution of an energy management system for a multiple-input bi-directional converter with HESS is introduced for different PV and load conditions. The EMS can undoubtedly follow the SC SoC and empower various modes to guarantee safe activity.
- ▪
- The primary benefit of the planned double-input bidirectional converter is its energy trade mode, which permits charging the SC freely from the battery. The double-input bidirectional converter has many advantages, including compelling power assignment between the different ESSs, quicker DC link voltage regulation, etc. PV power fluctuations and load disturbances require faster DC link voltage management.
- ▪
- The proposed modified converter operation allowed for the use of a similar controller for both HESS charging and discharging operations, resulting in a unified controller.
- ▪
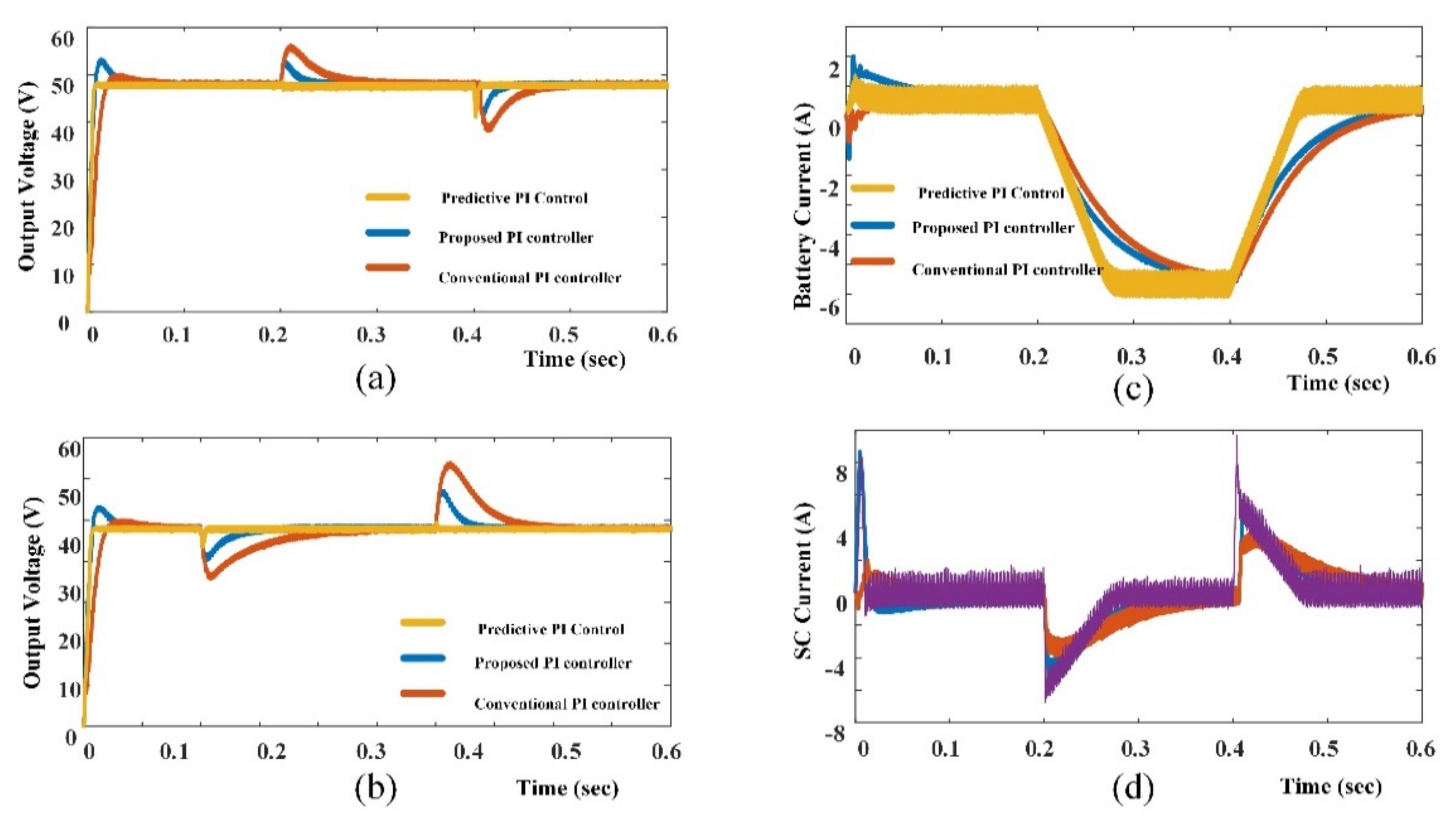
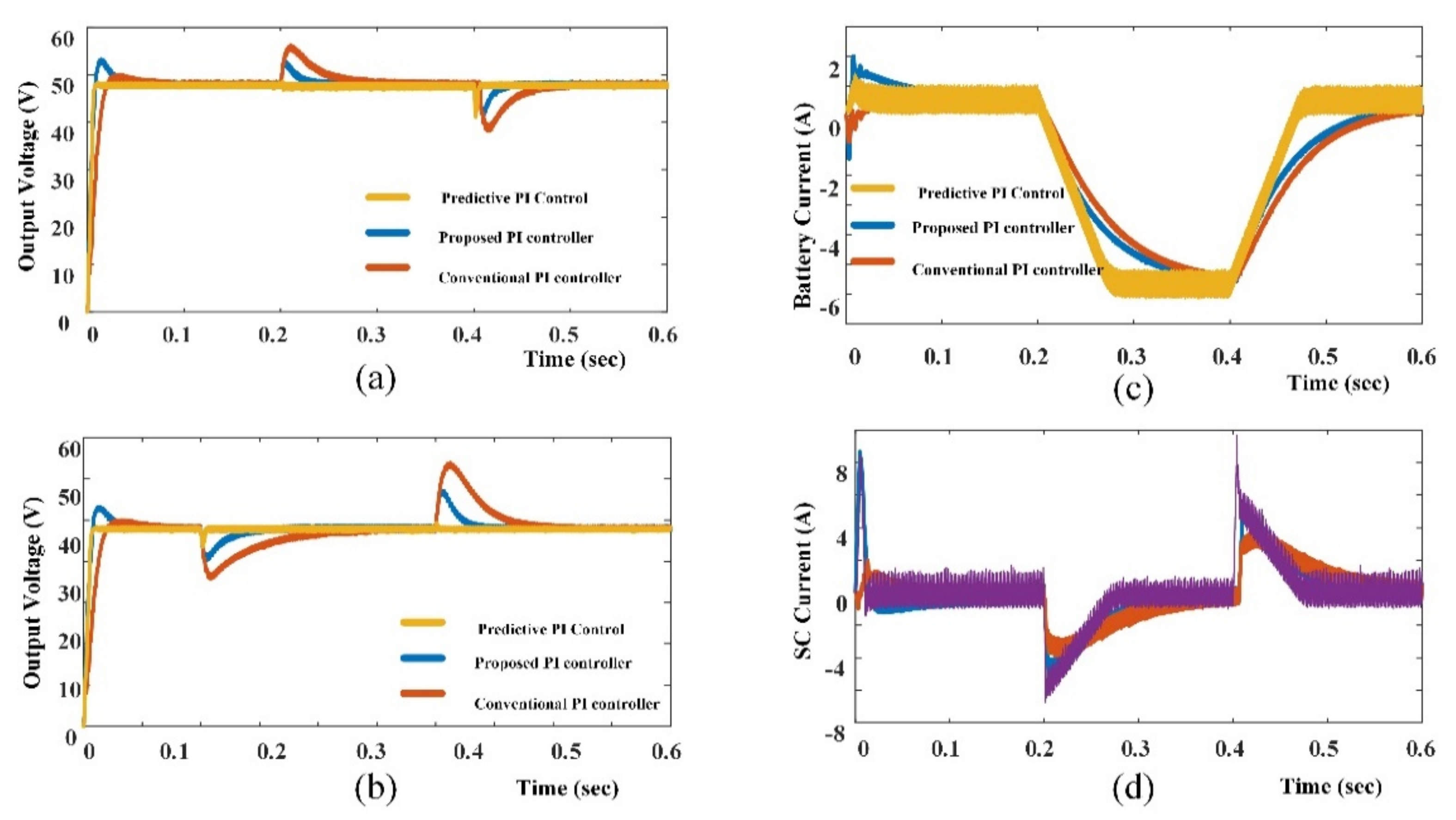
- The DC grid voltage profile can be significantly improved in terms of settling time and maximum peak overshoot when using the predictive PI control compared to the proposed and traditional PI control methods.
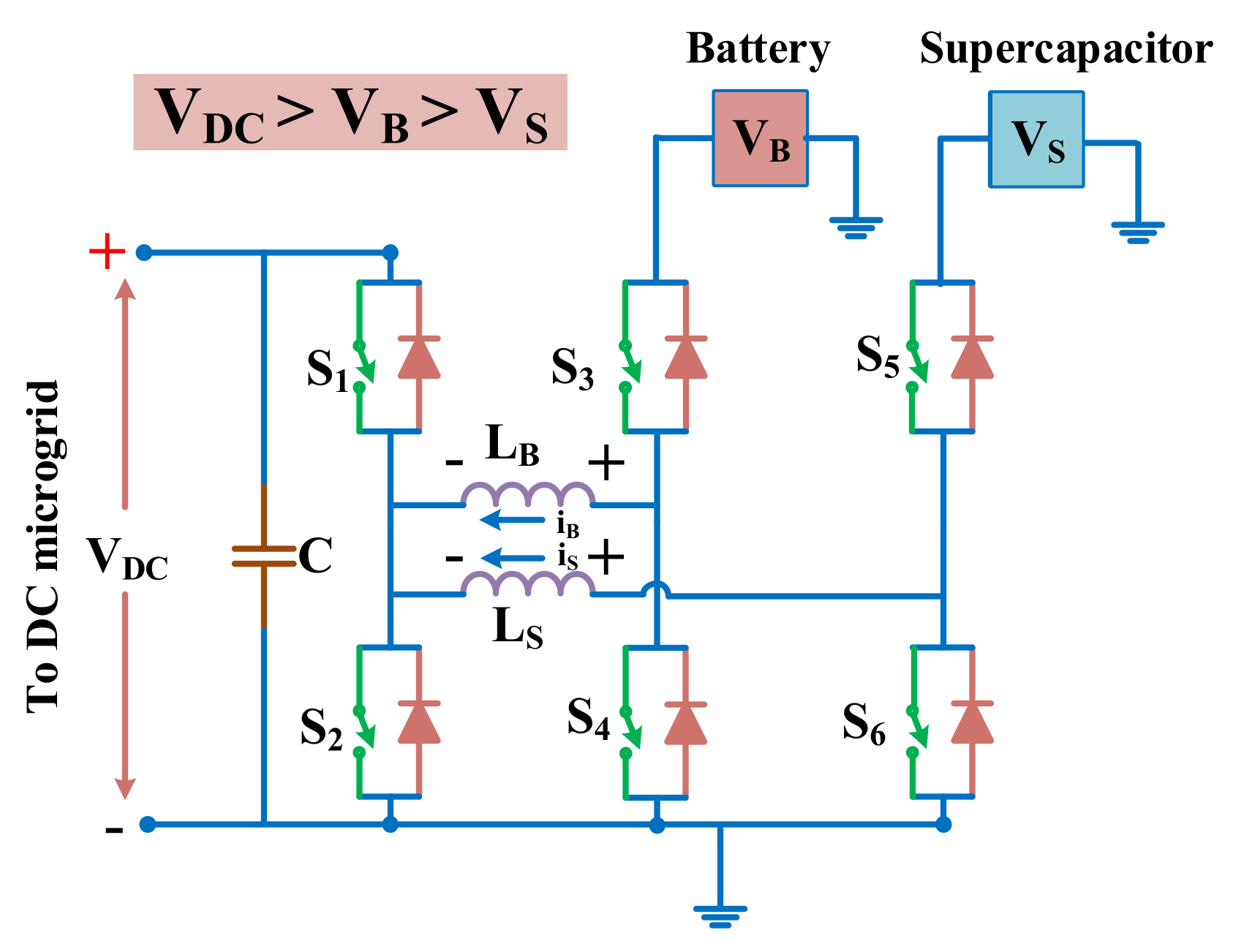
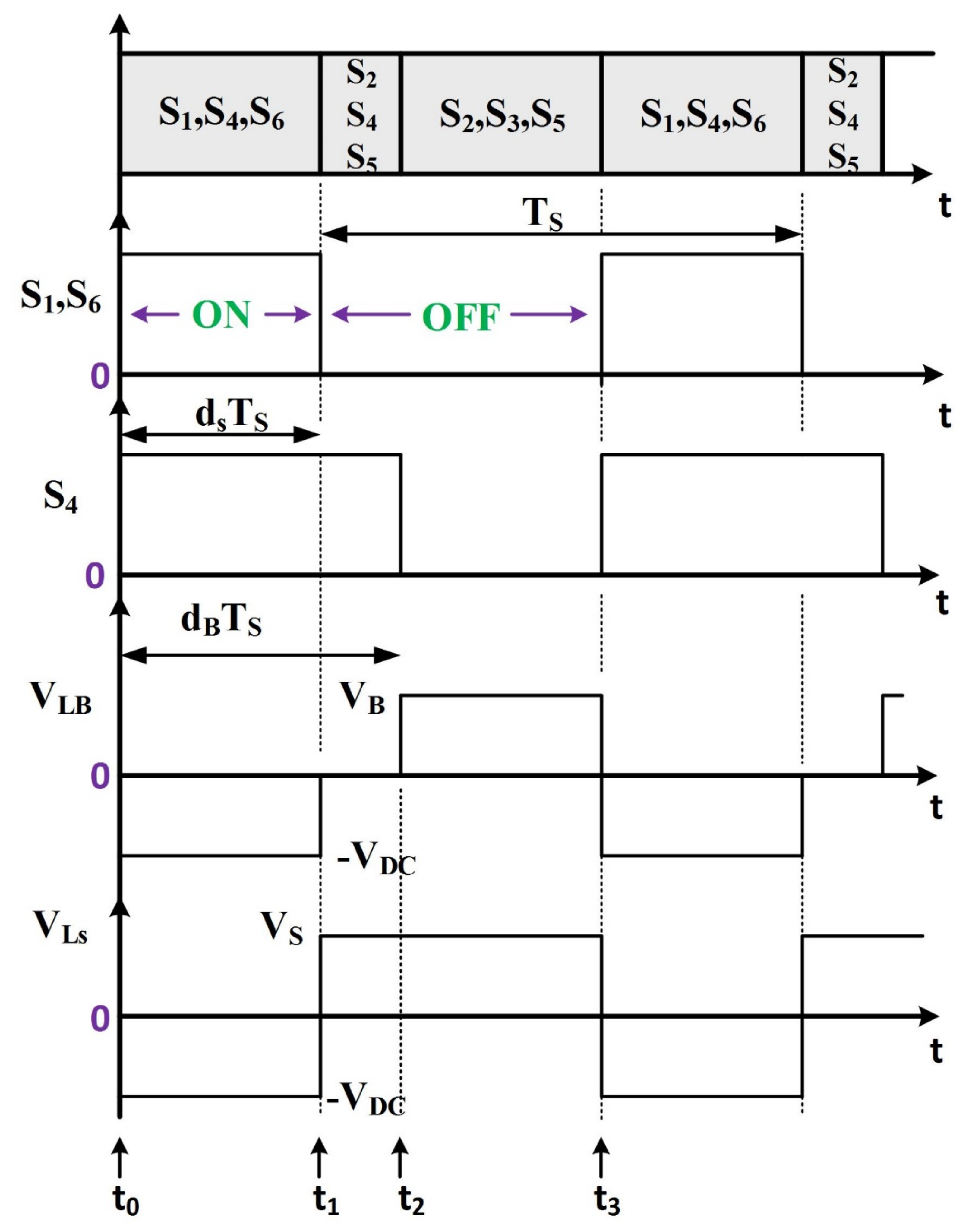
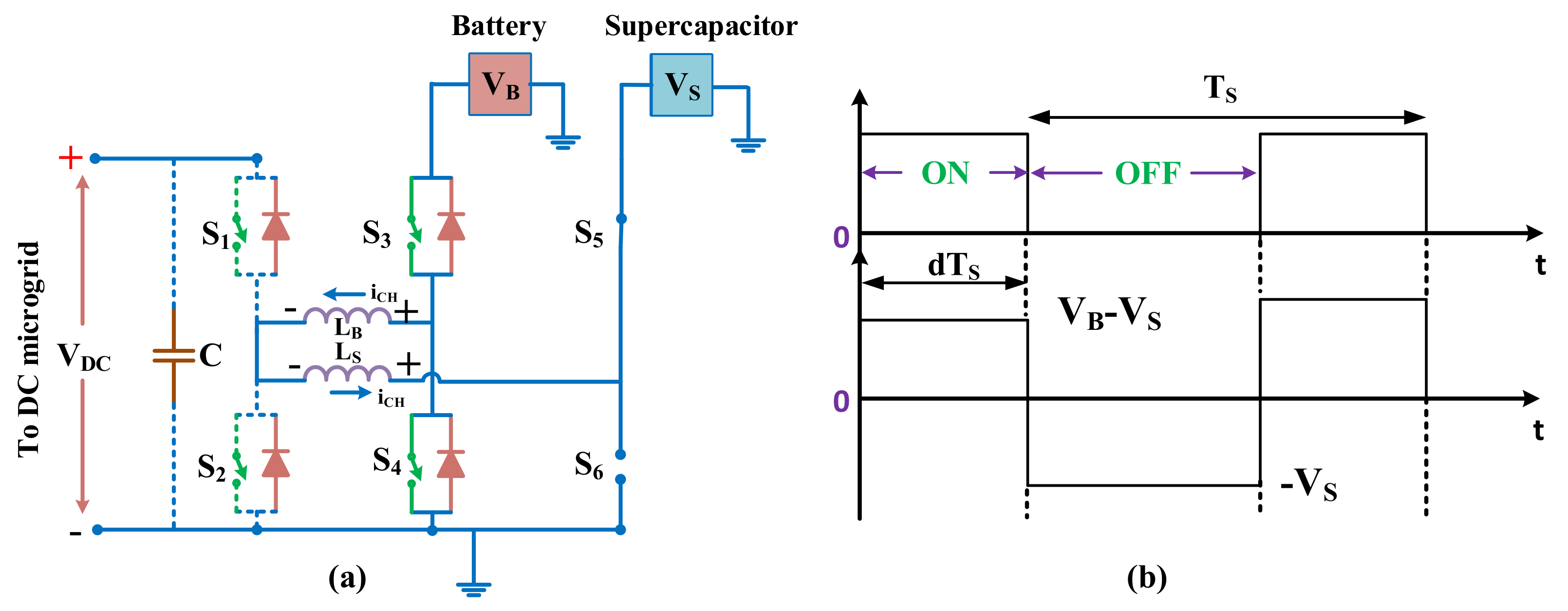
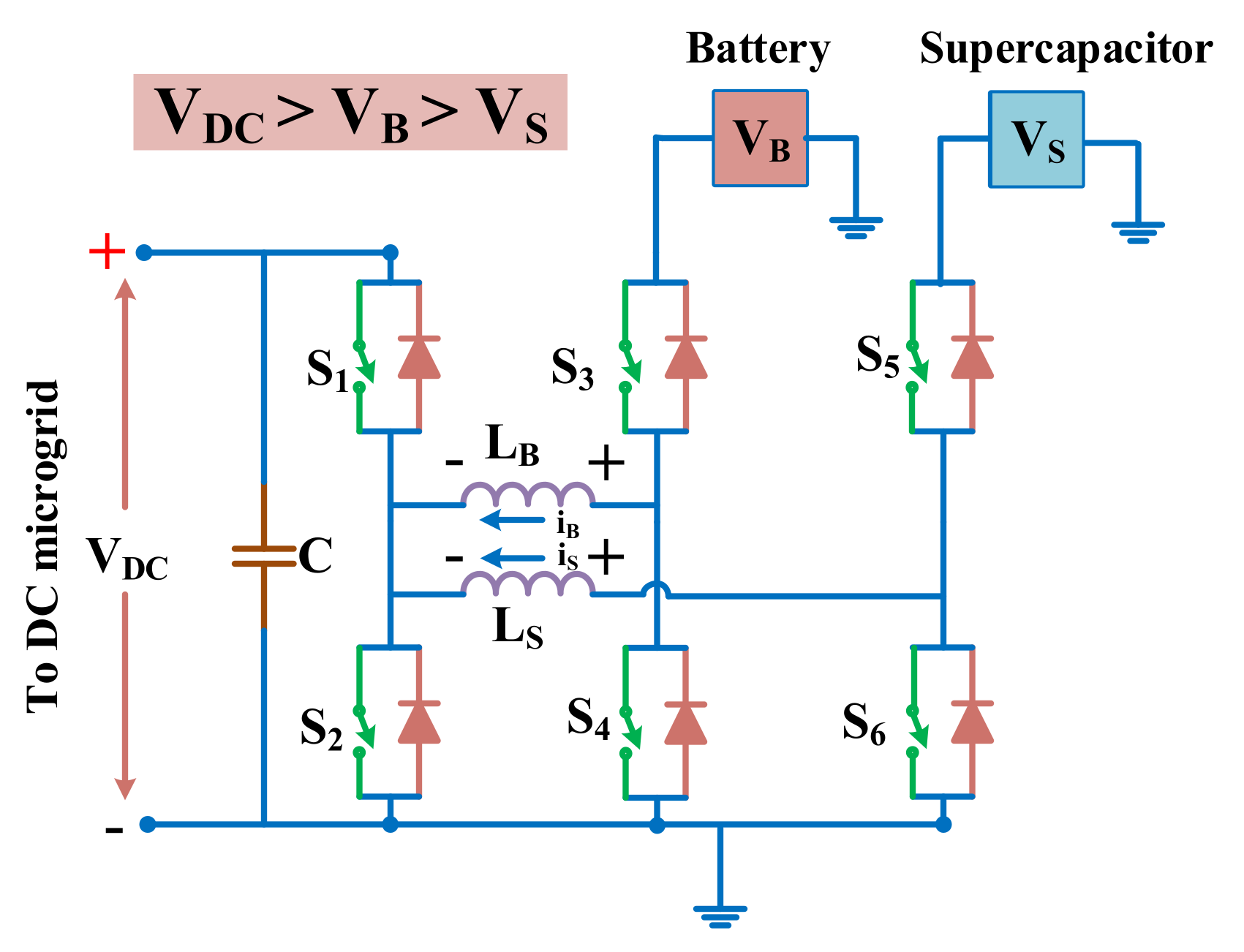
2. Operation of a Bidirectional DC-DC Converter with Dual Inputs
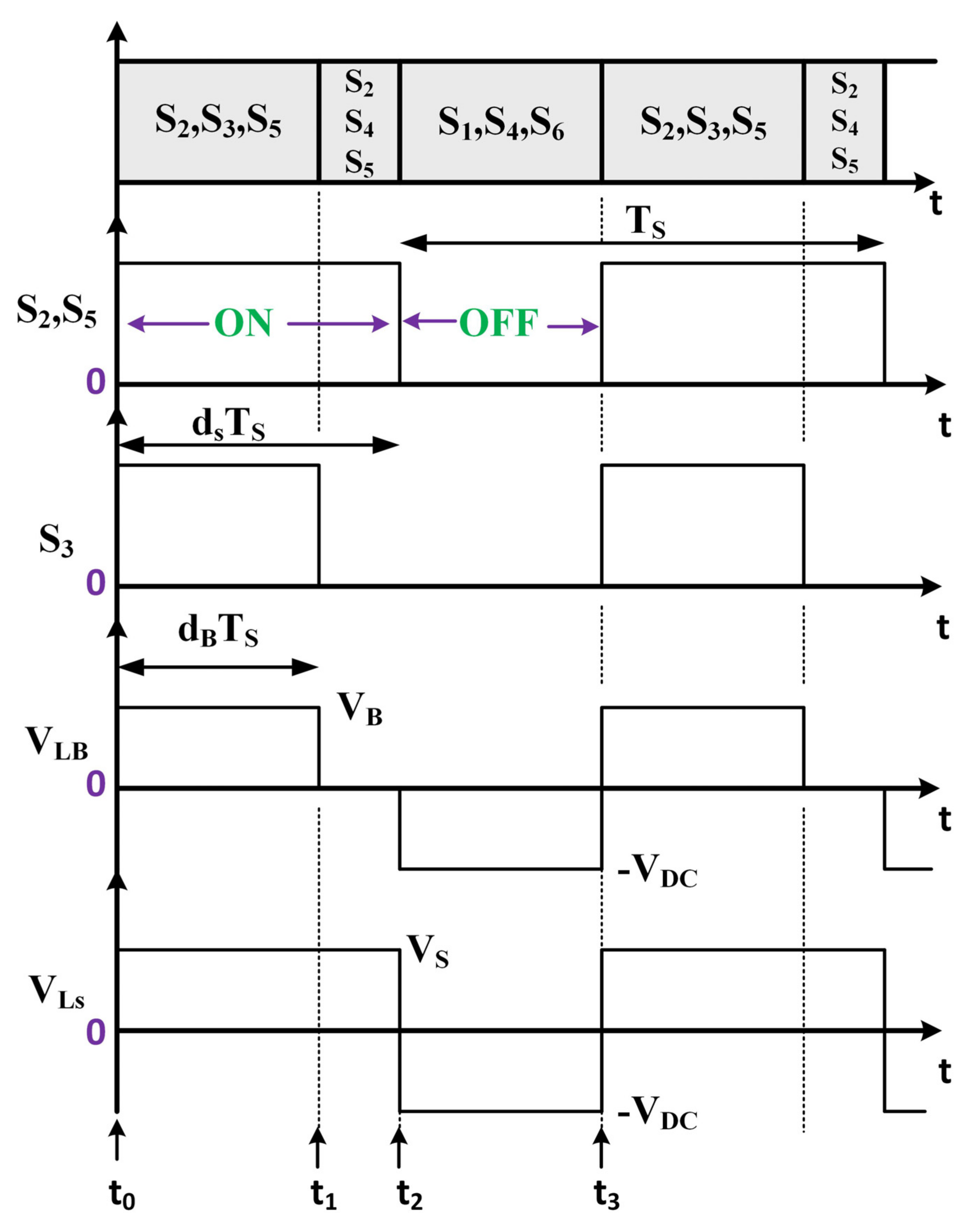
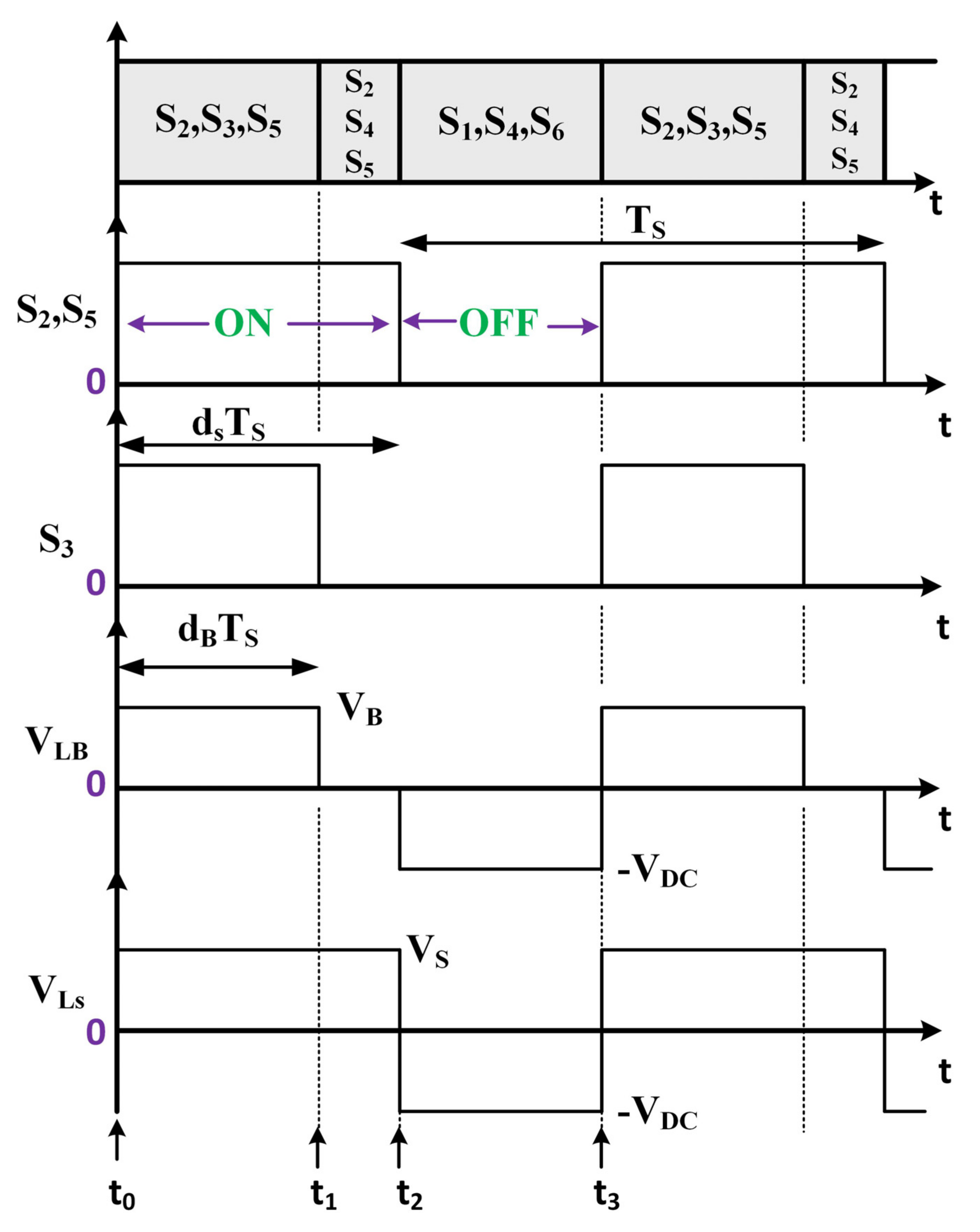
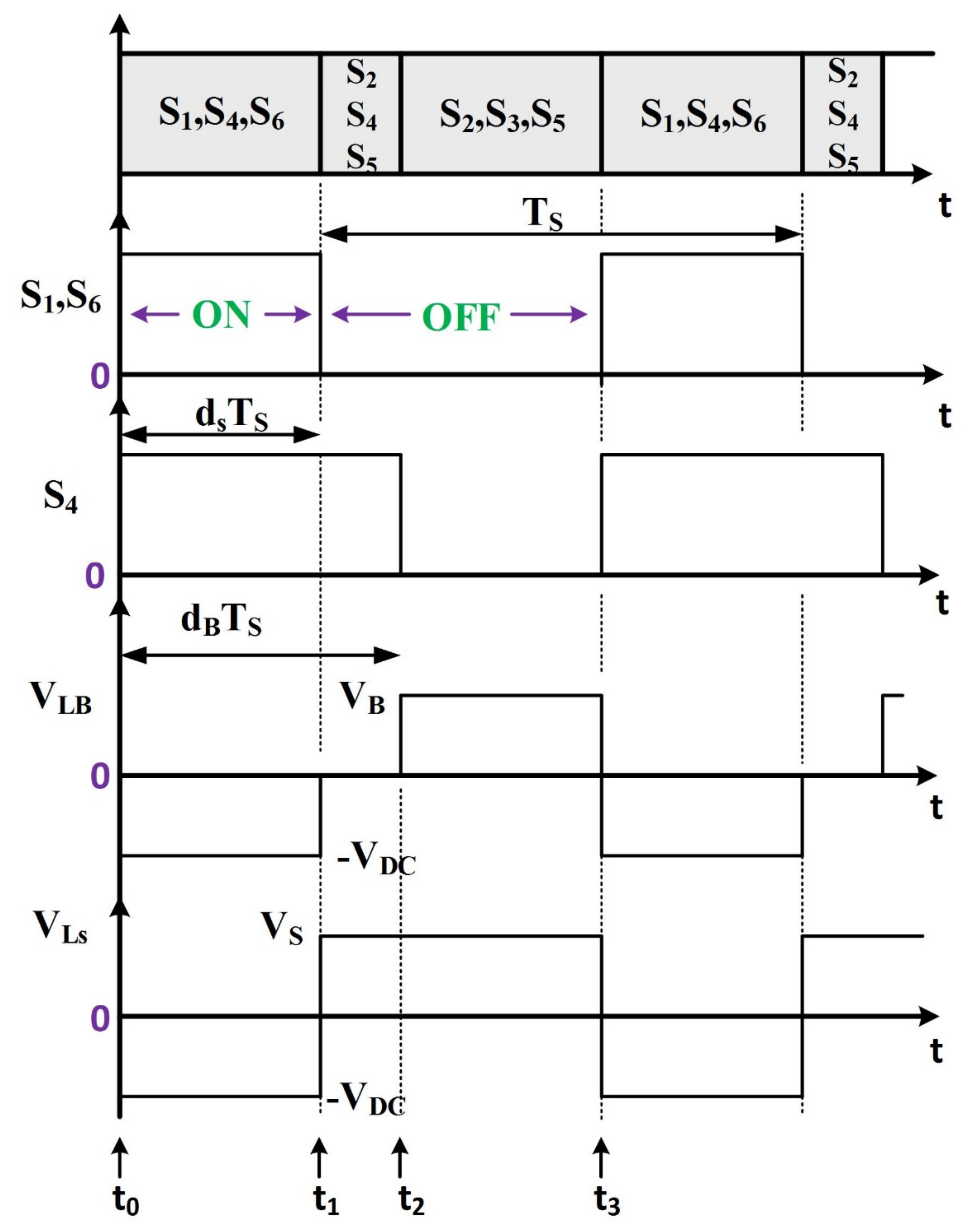
2.1. Discharging Sequence of HESS
2.2. Charging Sequence of the HESS
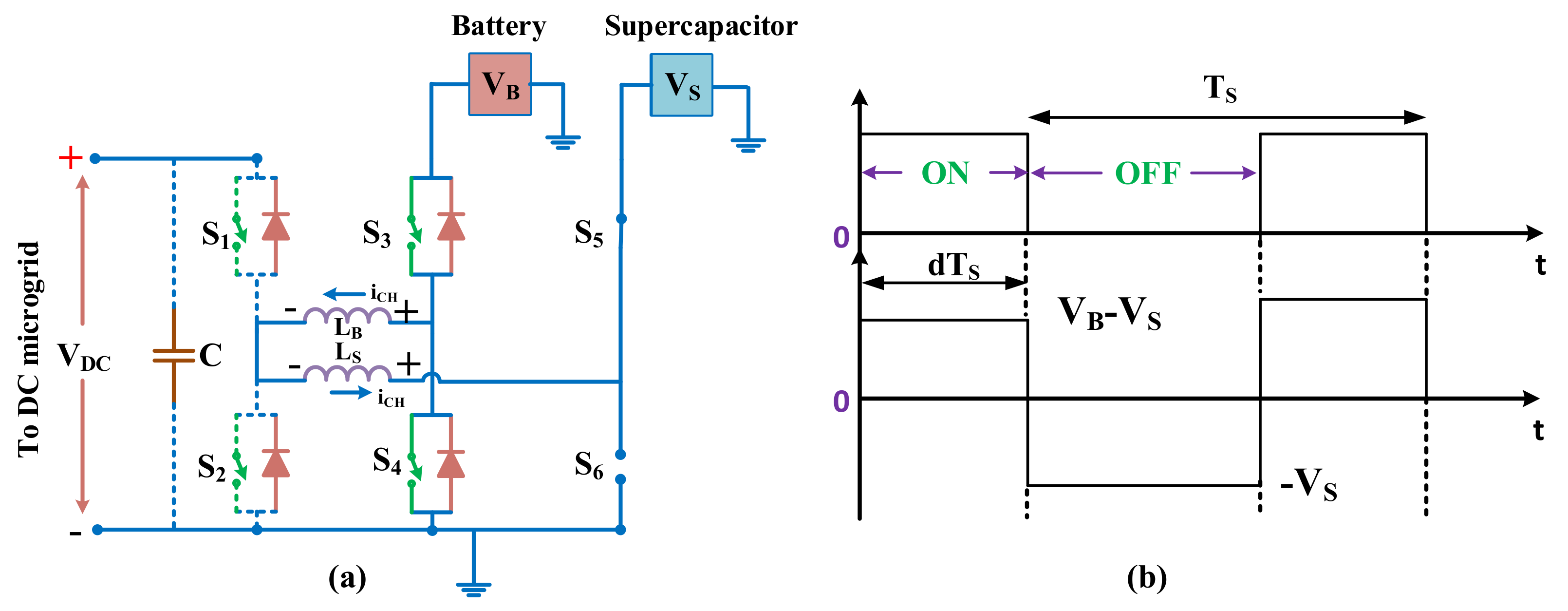
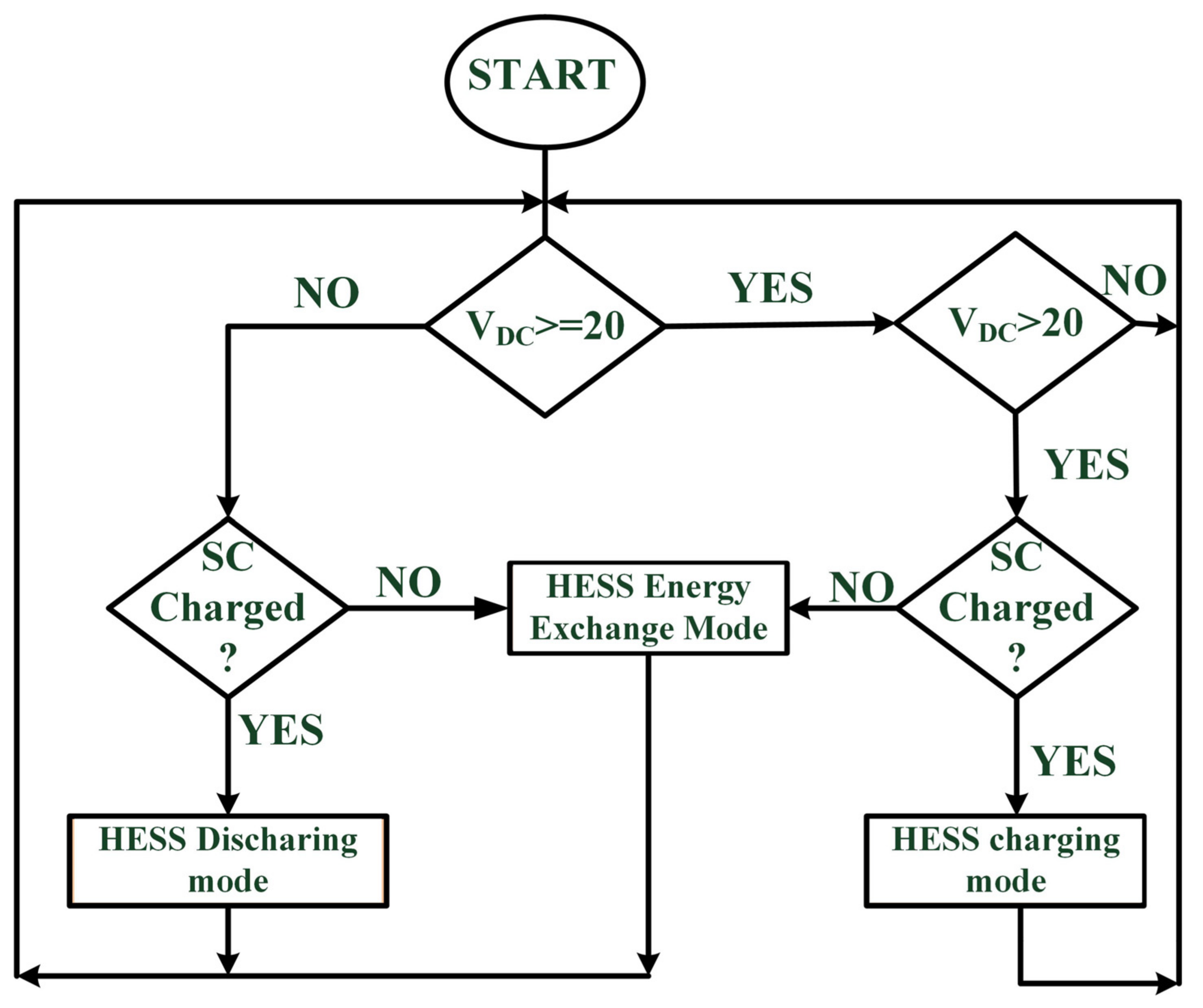
2.3. HESS Mode of Energy Exchange
2.4. Transitions between Modes
3. Double-Input Bidirectional Converter and Controller Design Using a Small Signal Linear Averaged Model
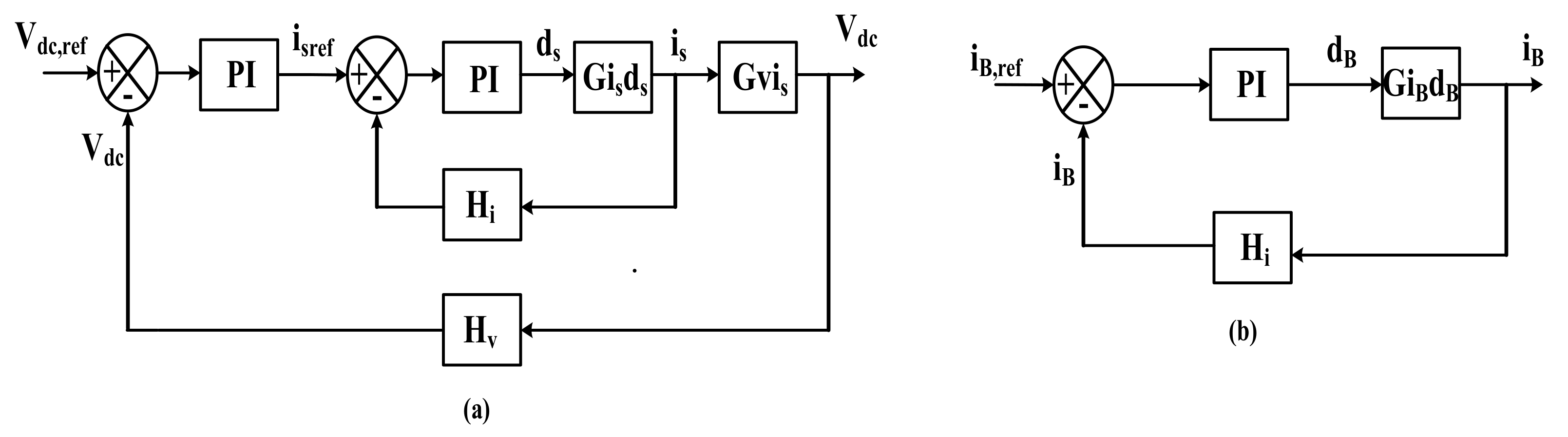
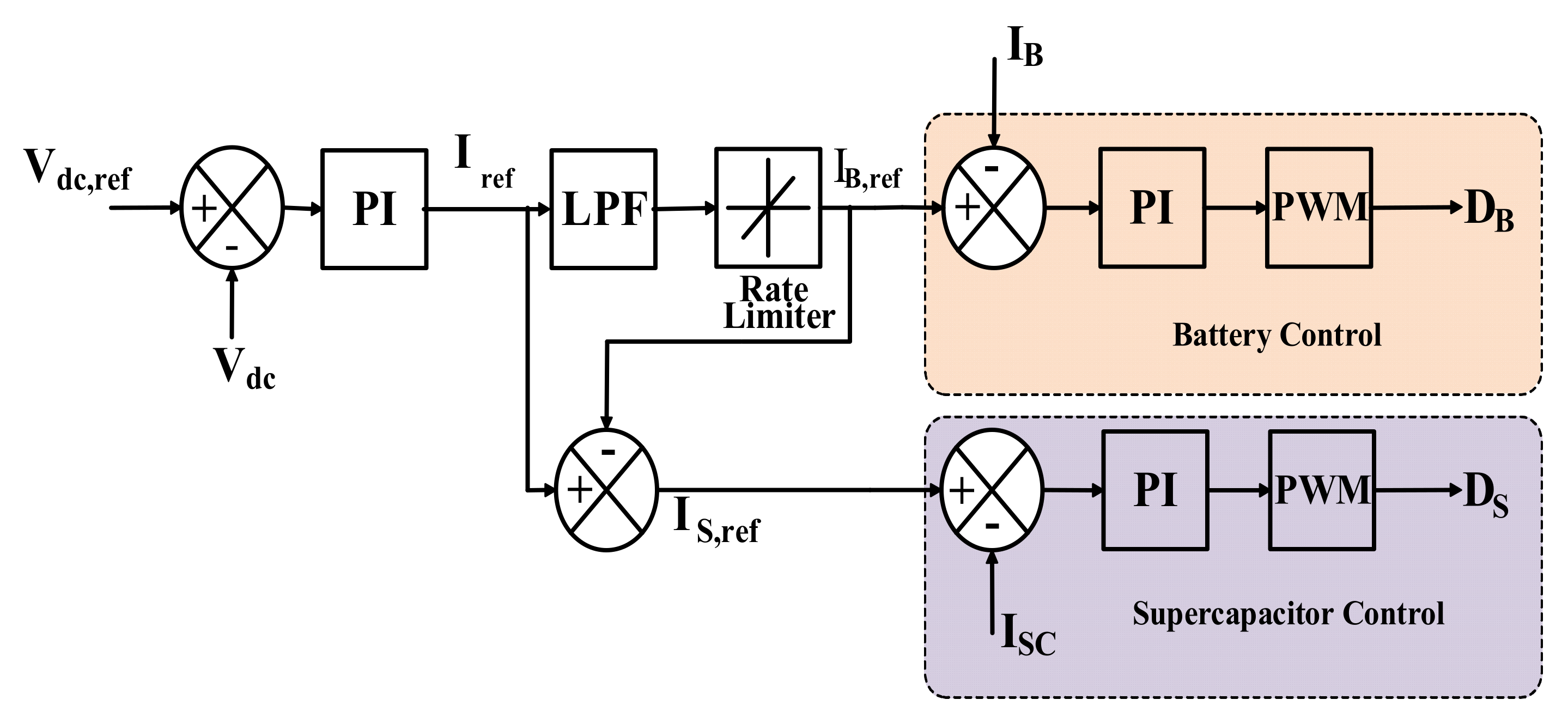
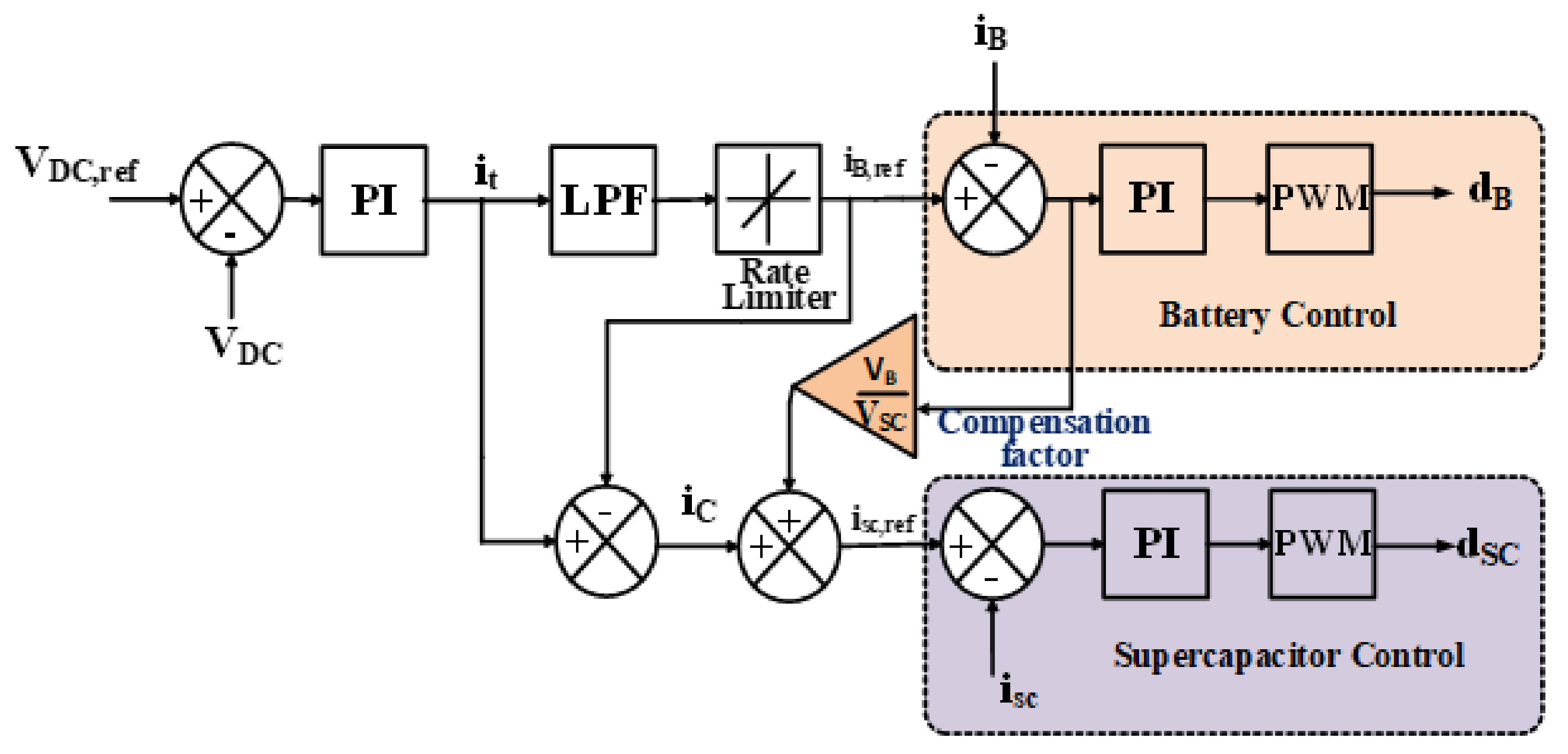
3.1. Design of Conventional and Proposed PI Control Scheme
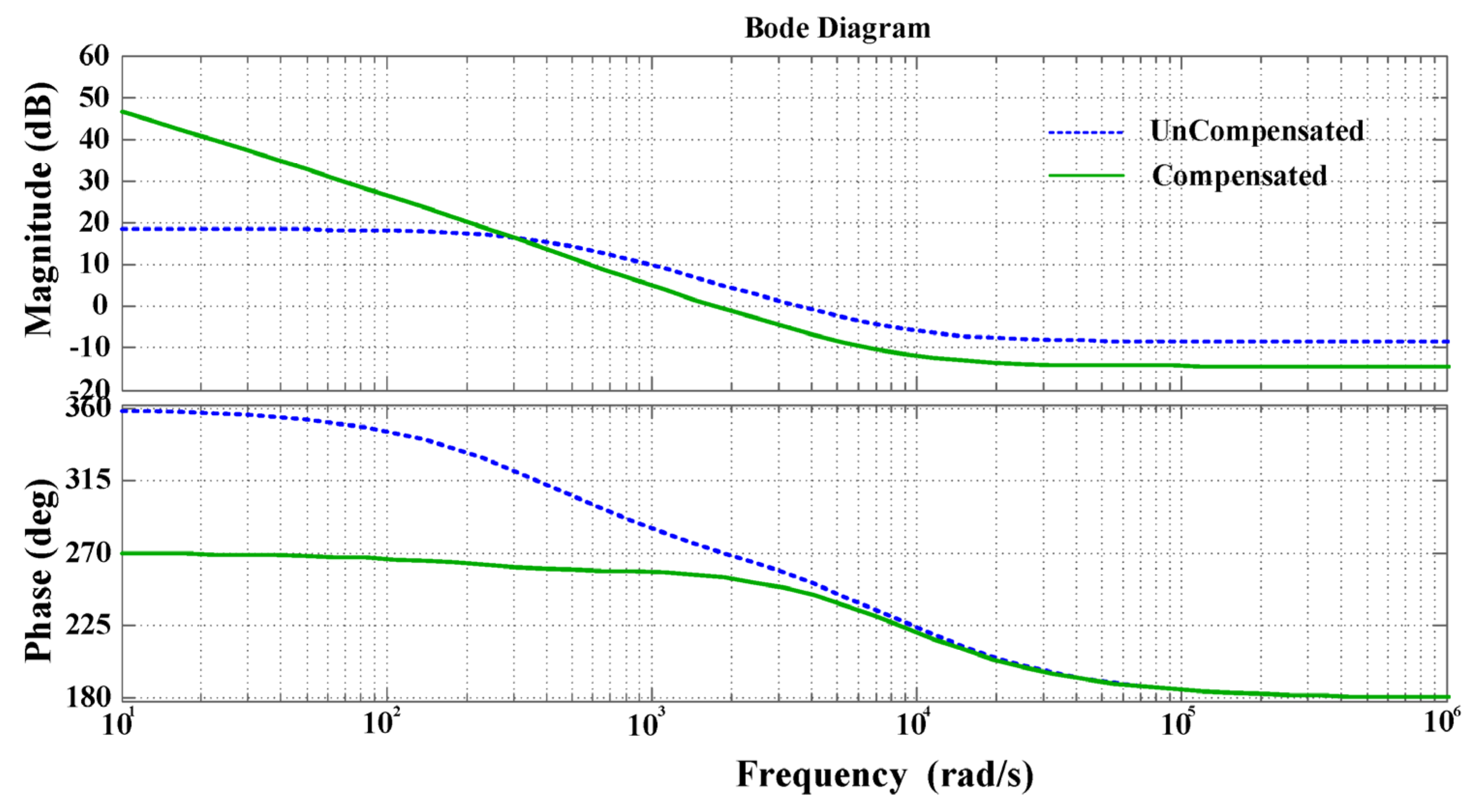
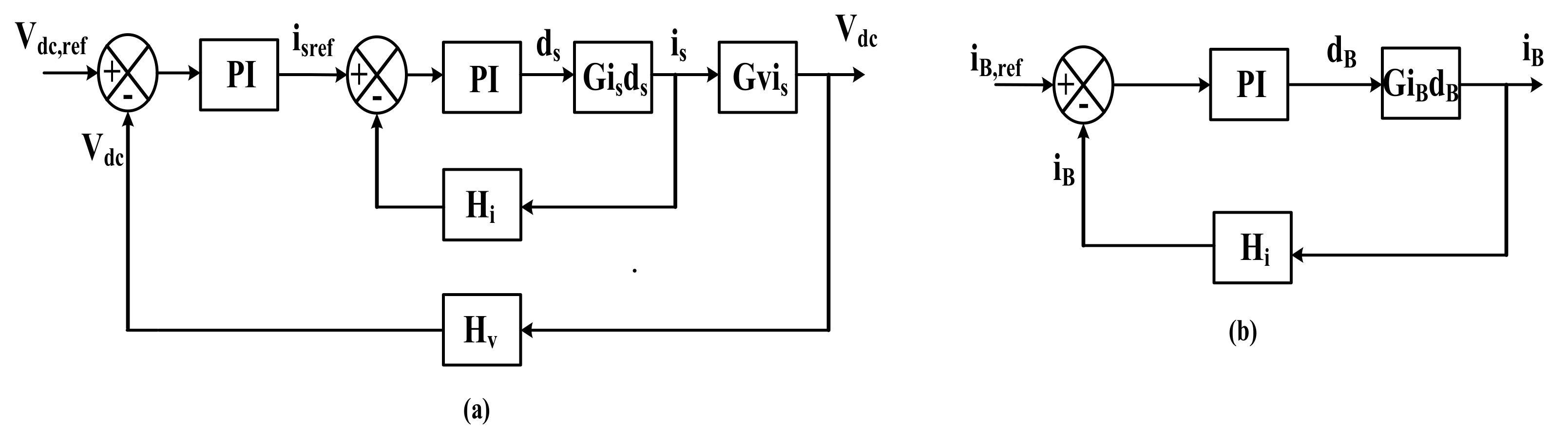
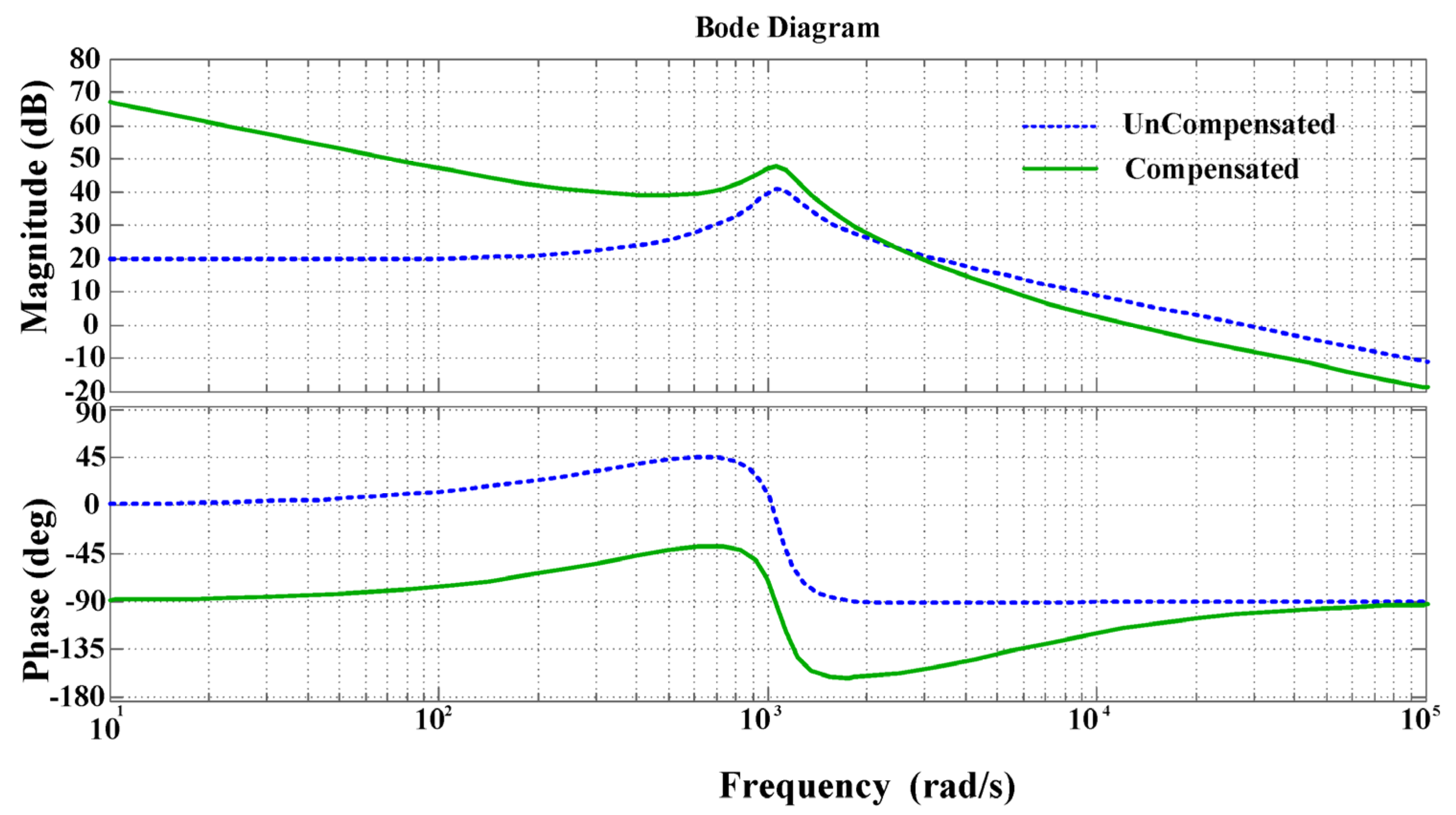
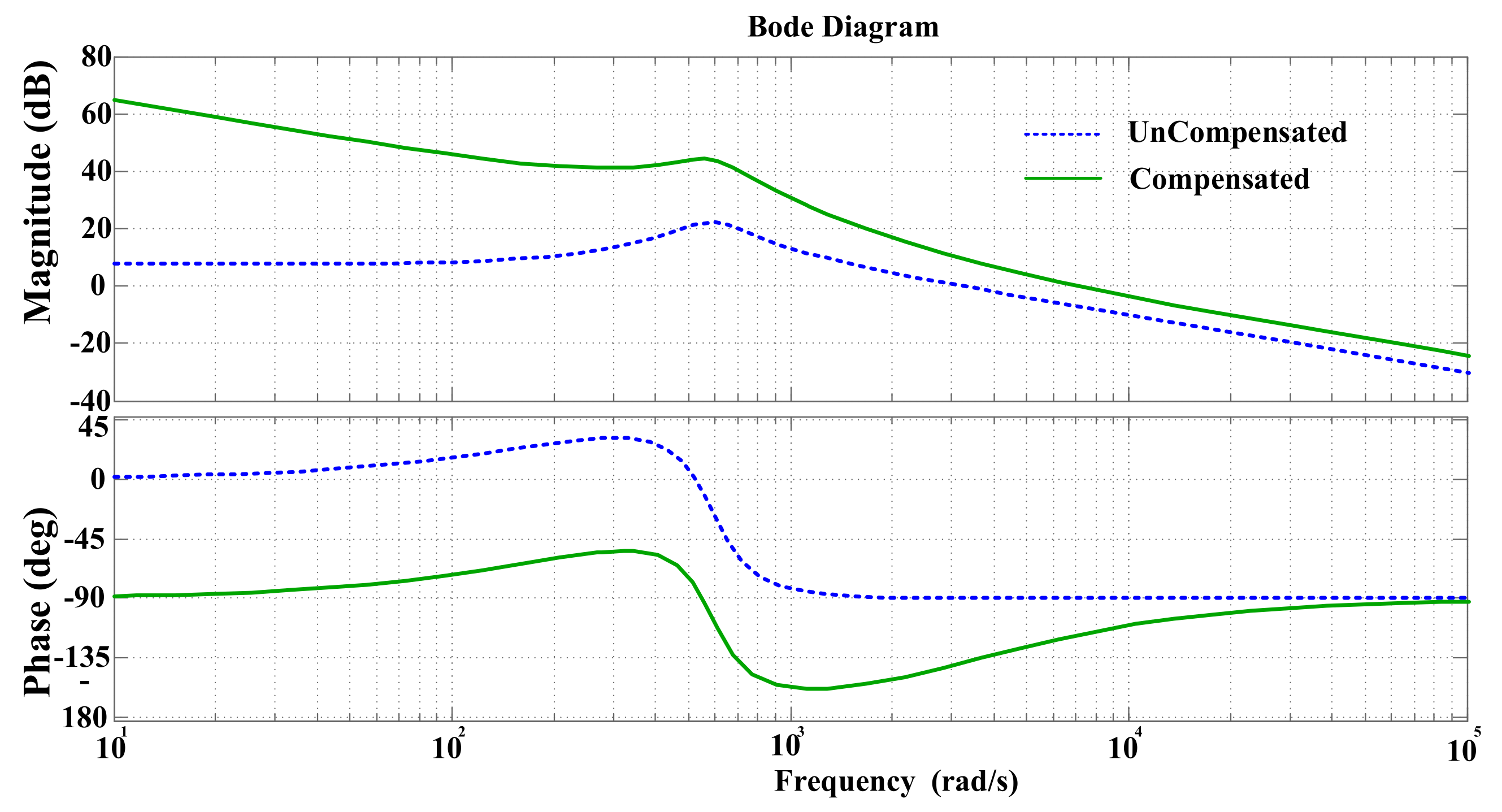
3.1.1. The Supercapacitor-DC Microgrid Stage Small Signal Linear Averaged Model
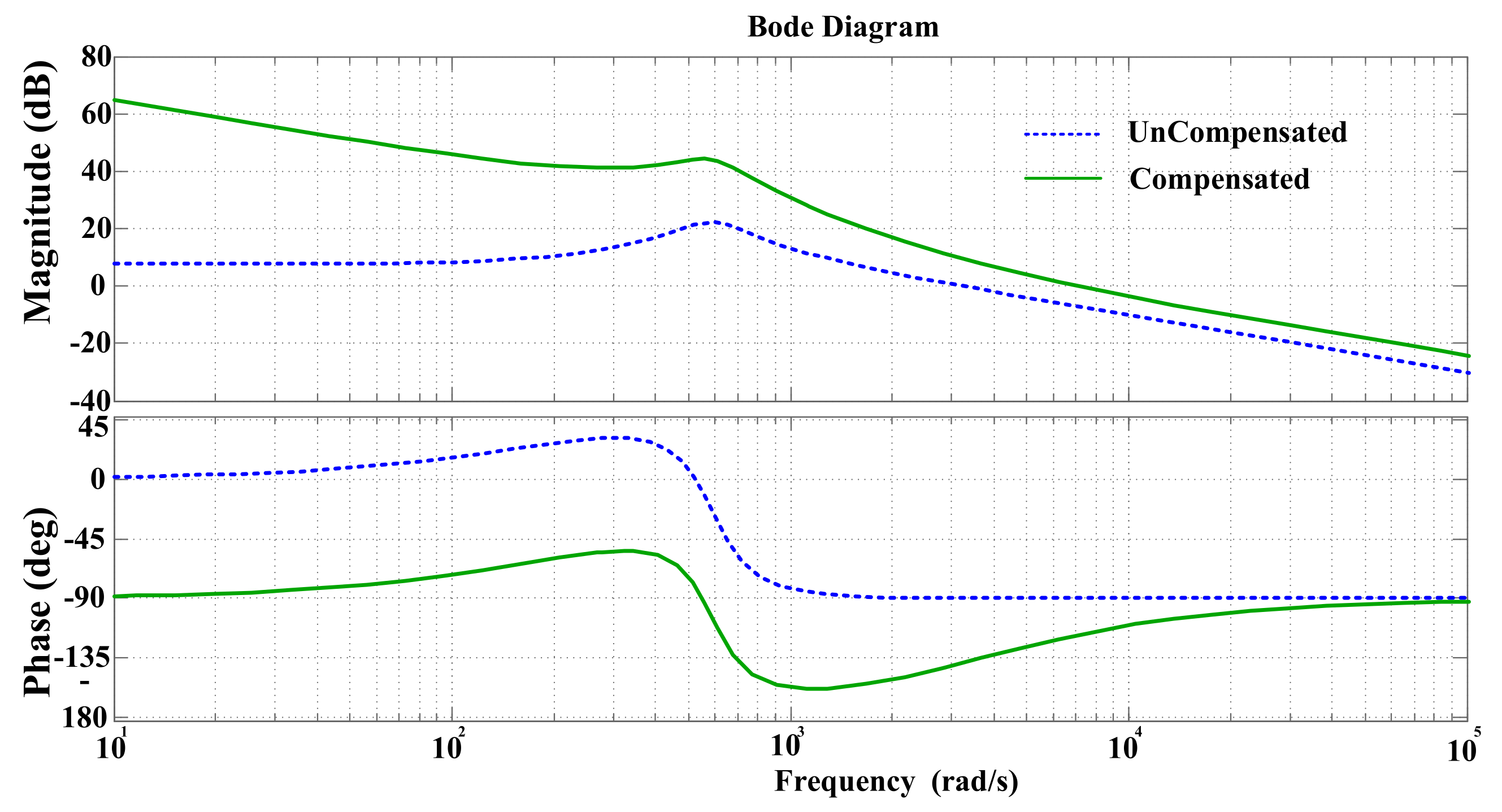
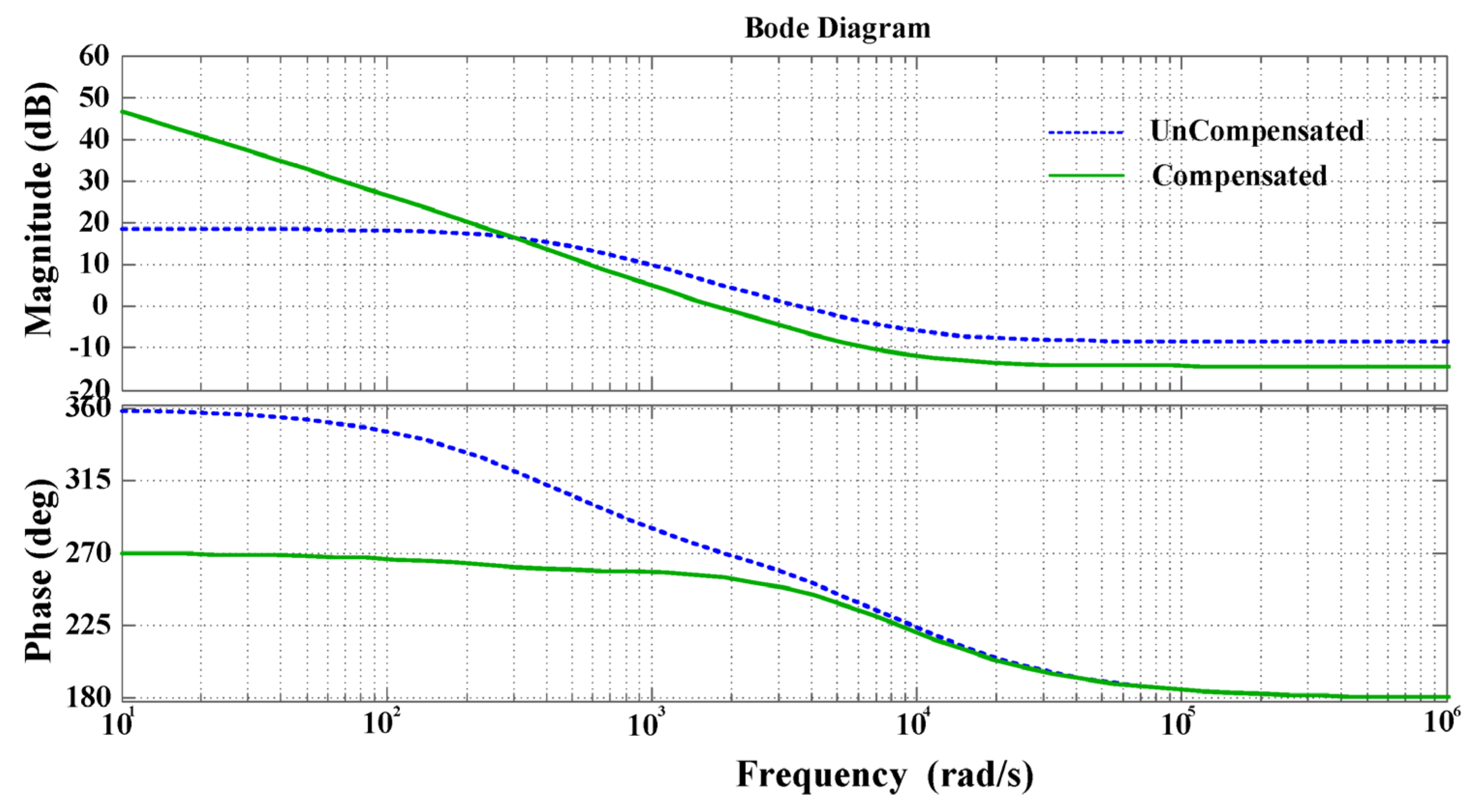
3.1.2. Modeling a Battery-DC Microgrid Stage with a Small-Signal Linear Averaged Model
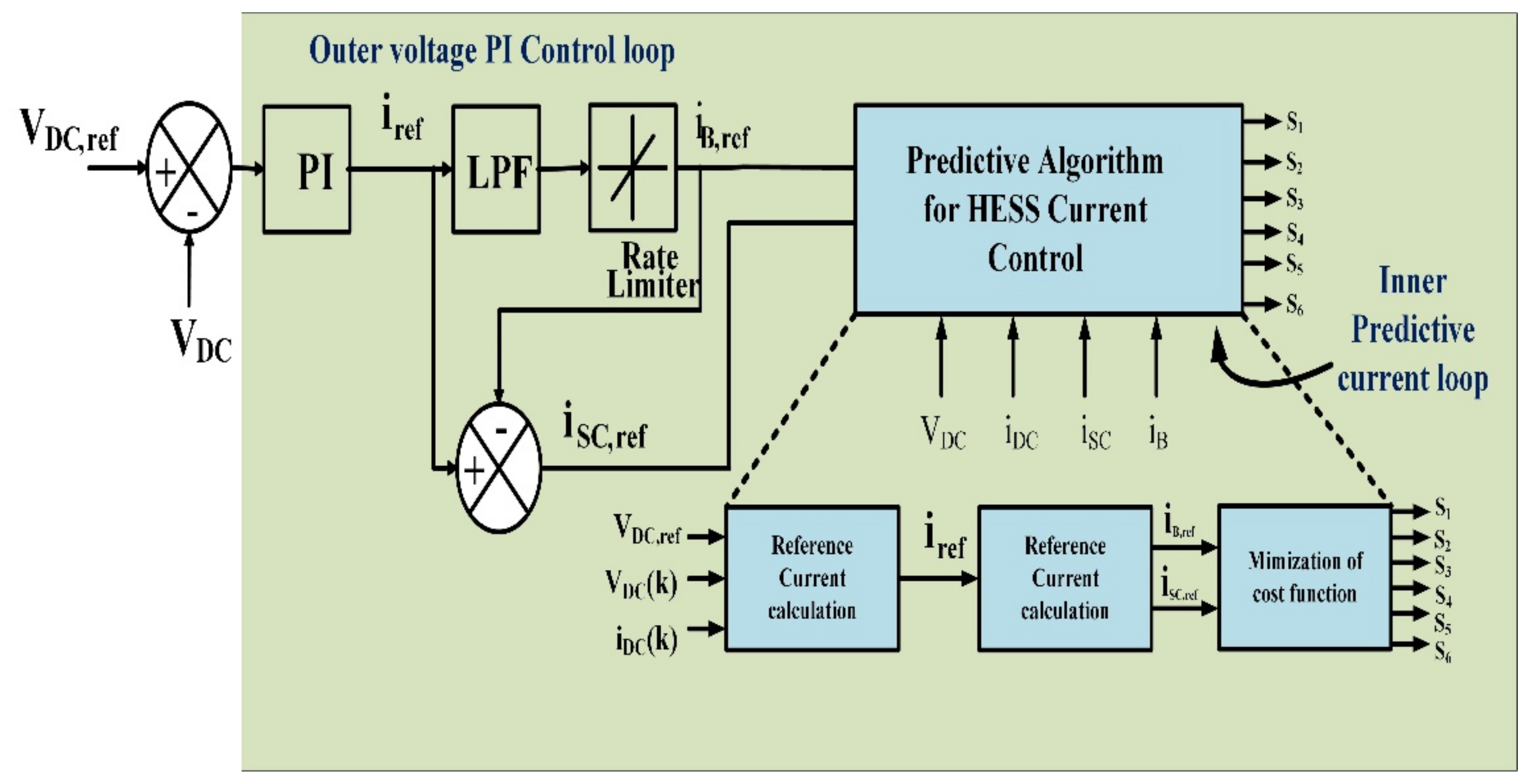
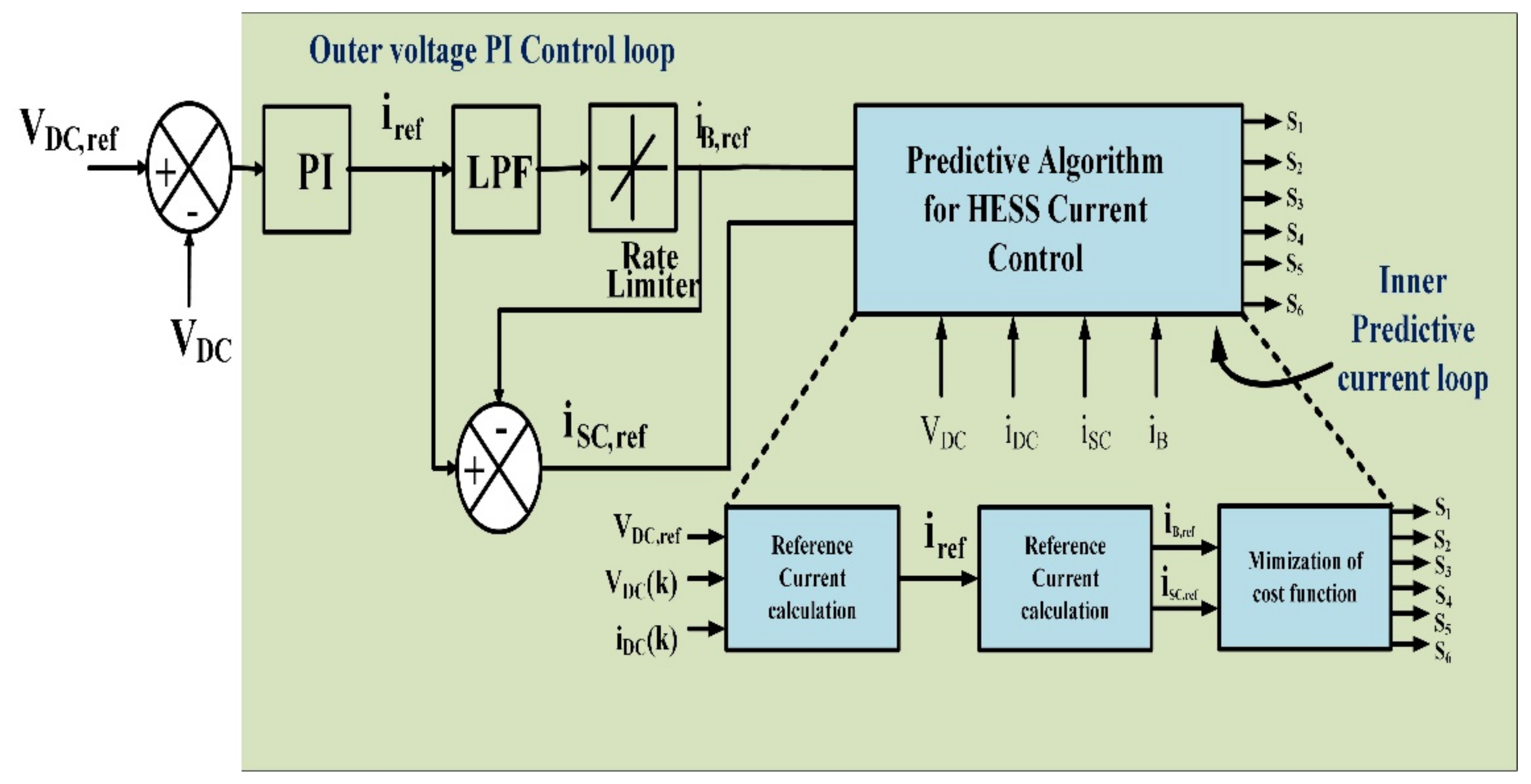
3.2. Predictive PI Control Scheme
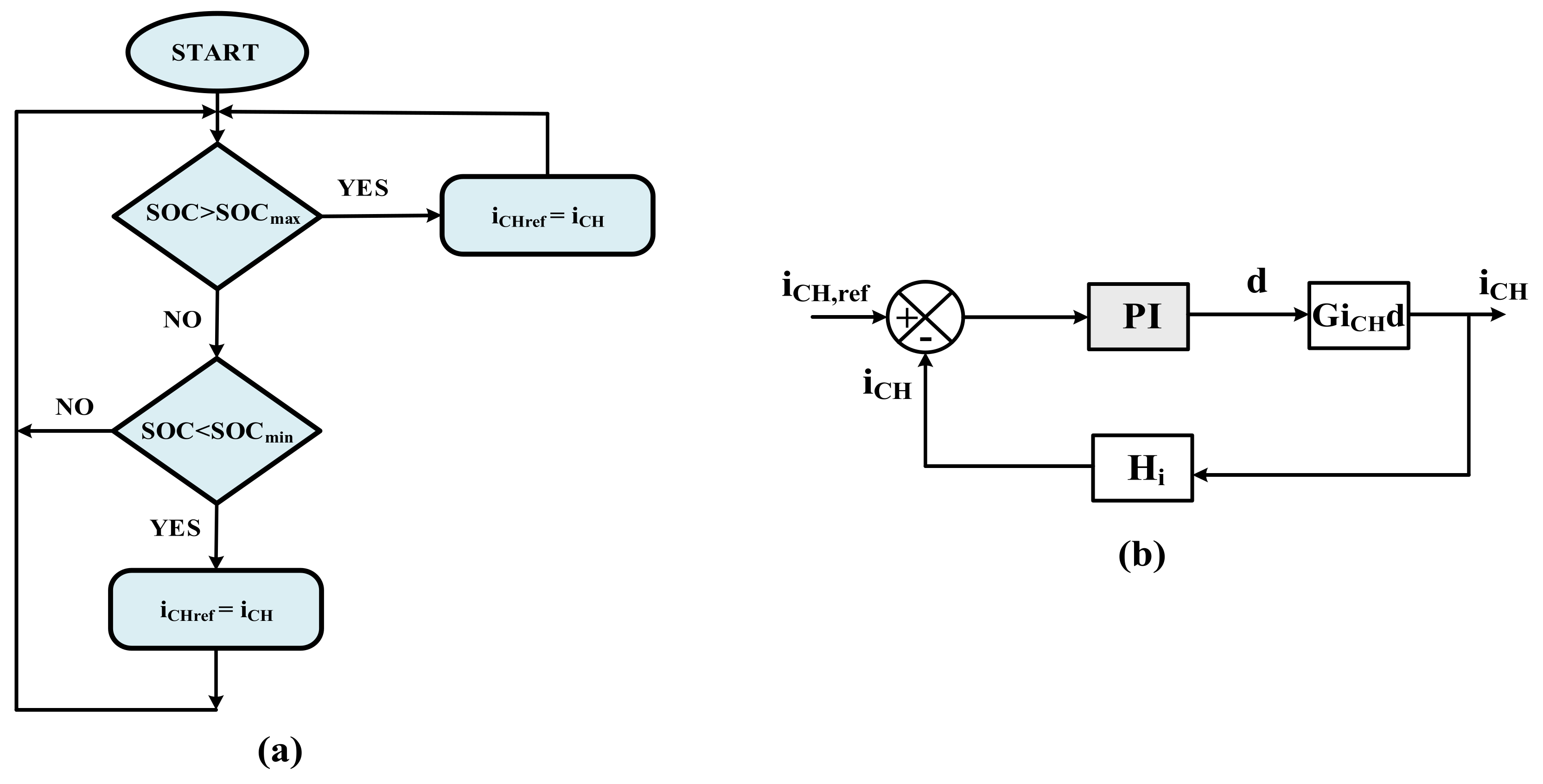
Inner Predictive PI Control Scheme
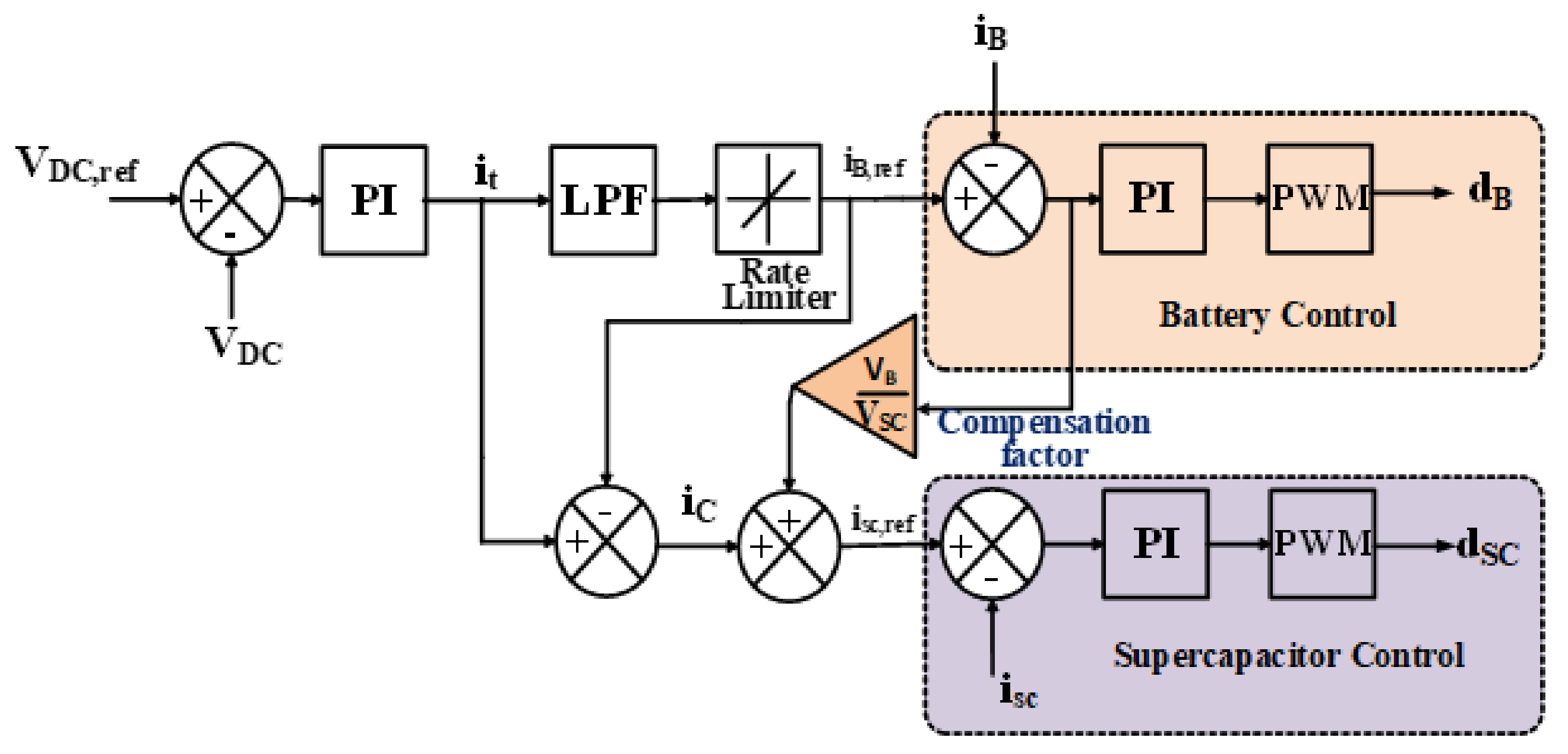
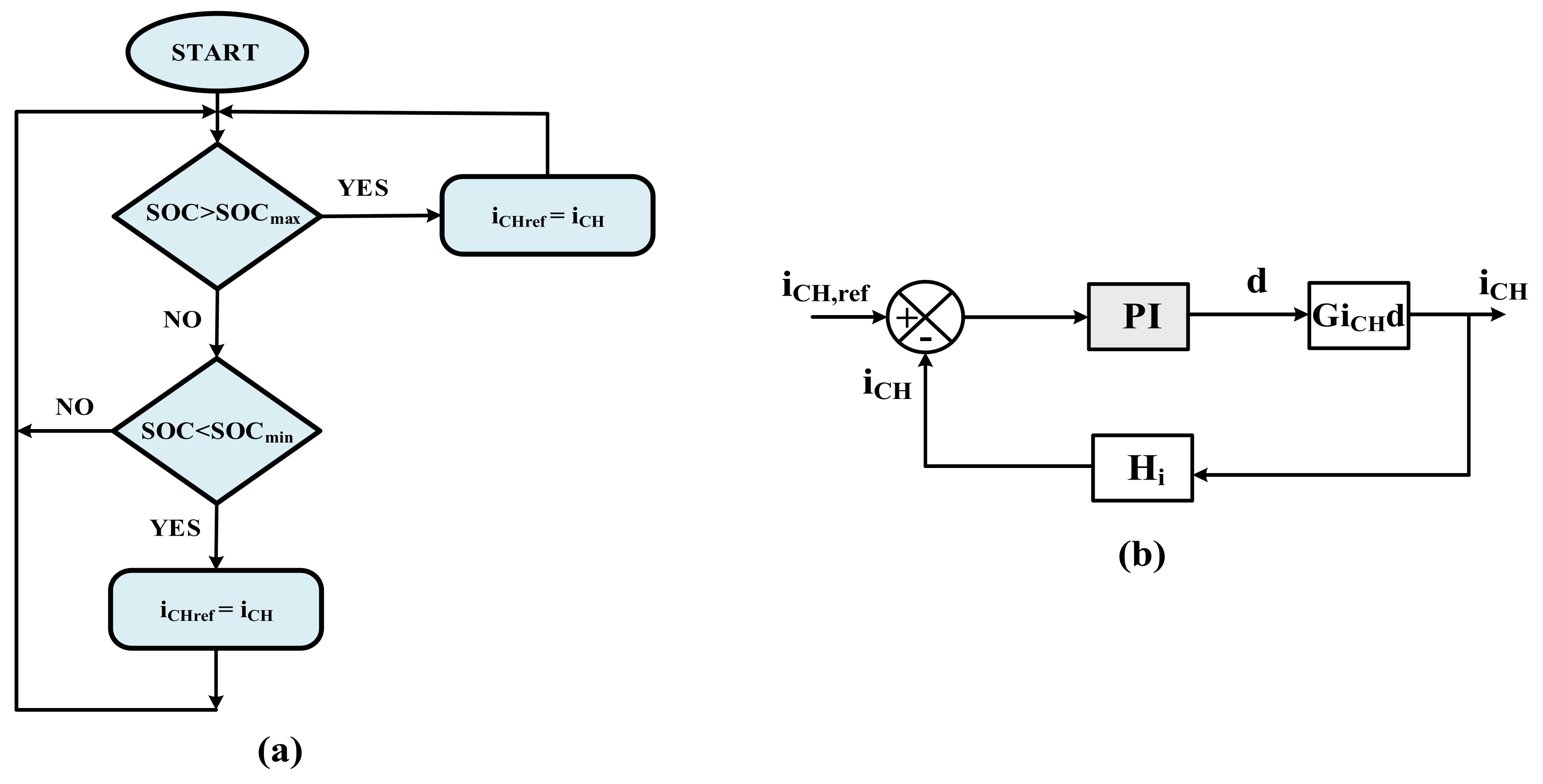
4. State-of-Charge Controller for Supercapacitors
5. Simulation Results and Analysis
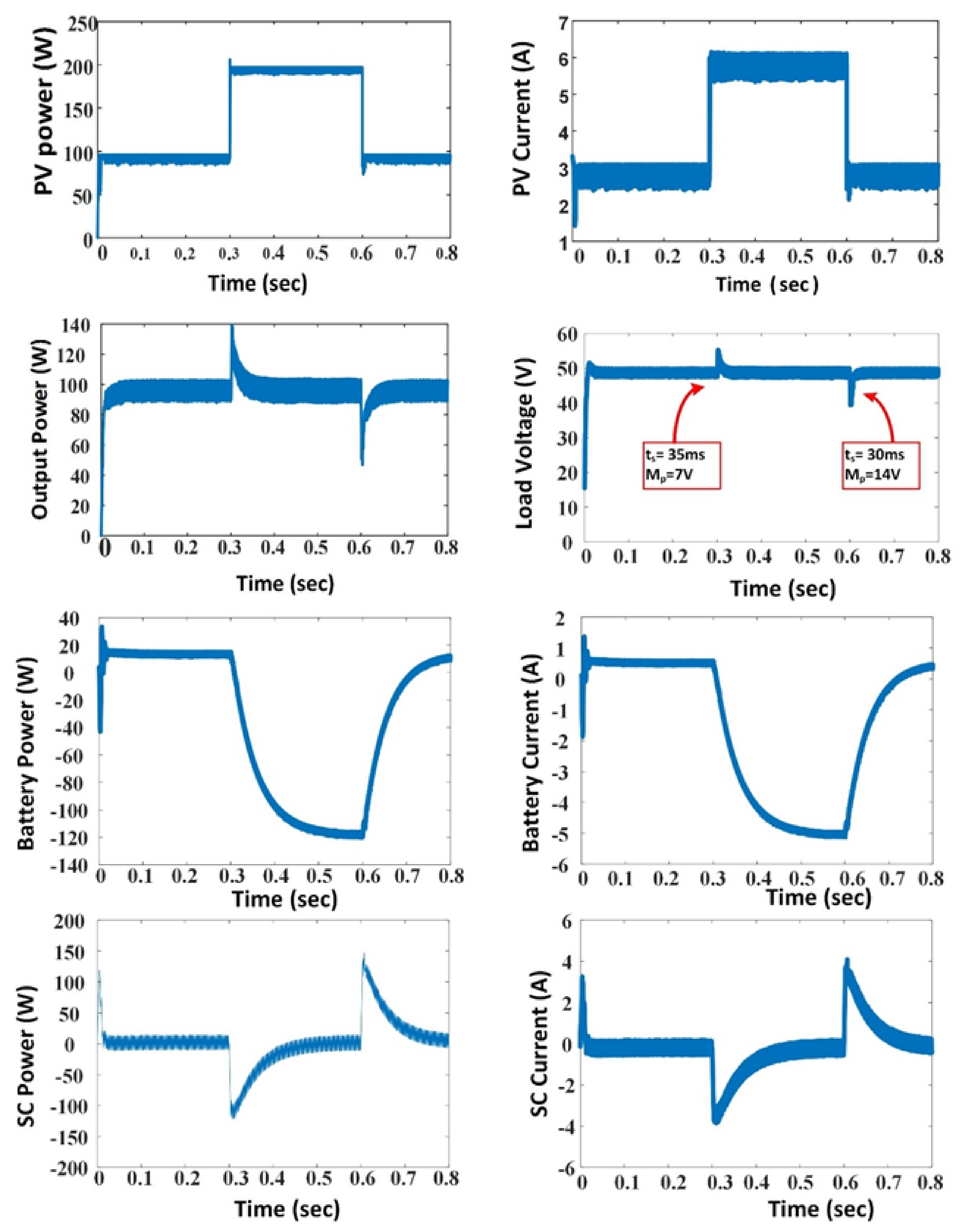
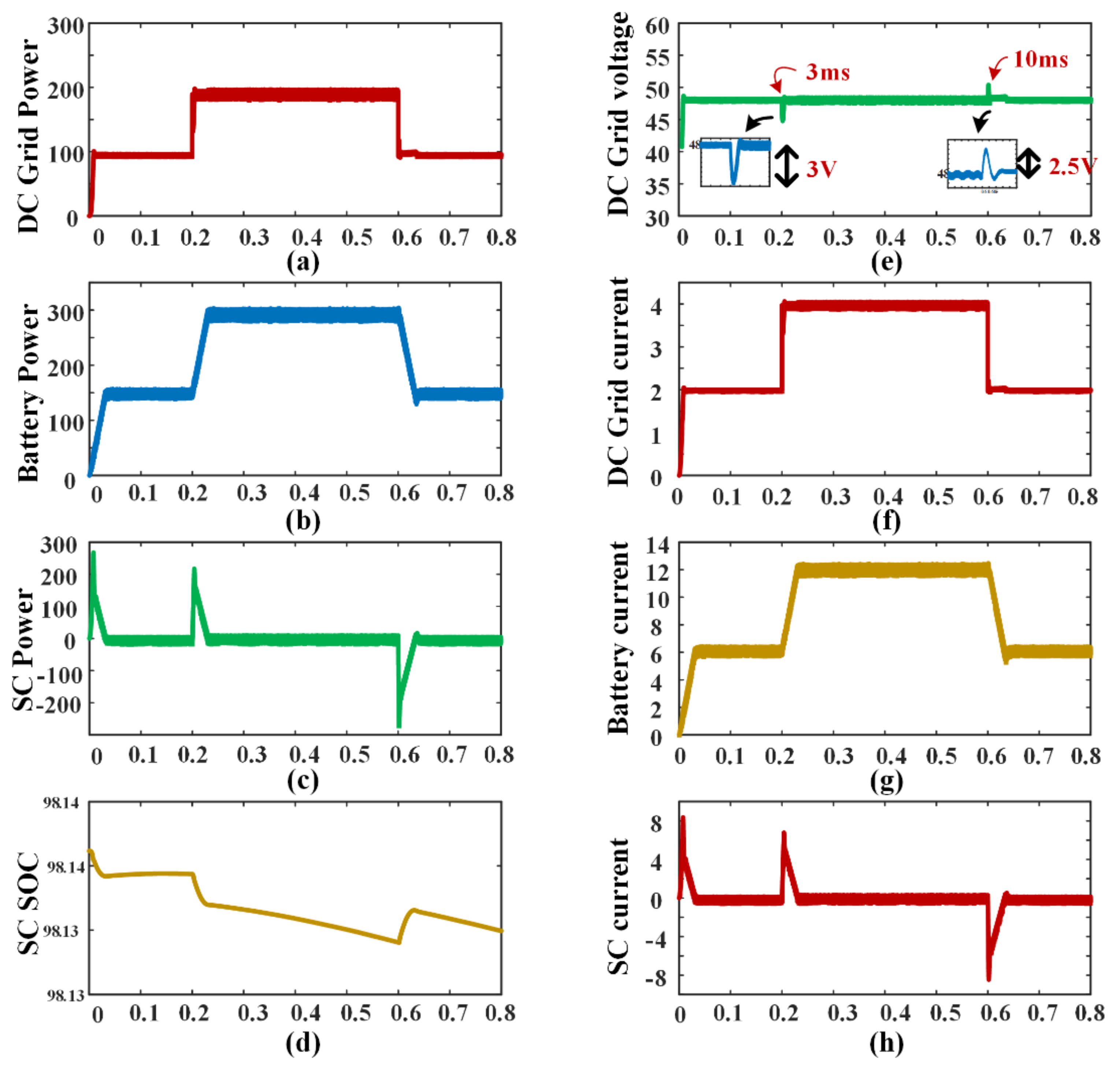
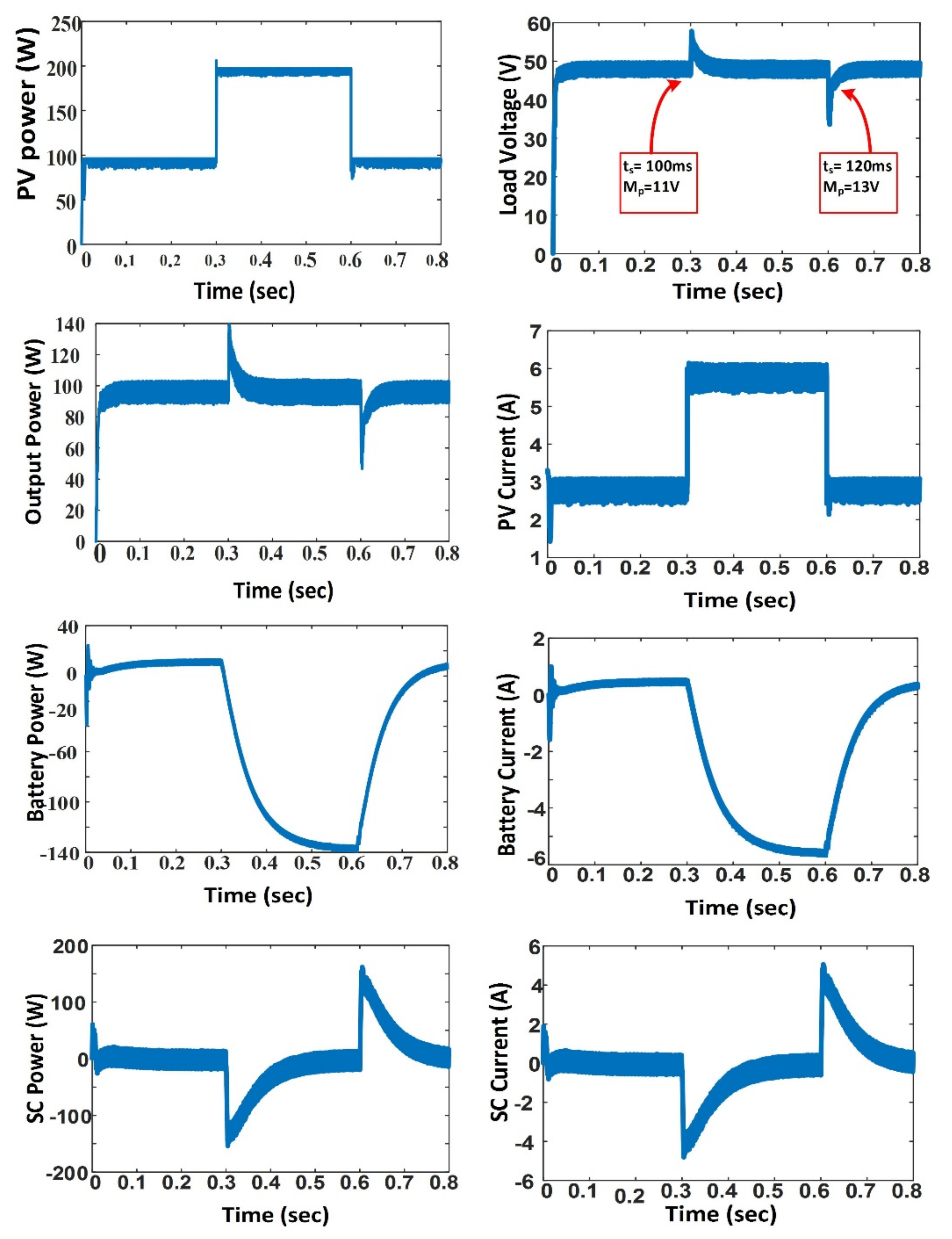
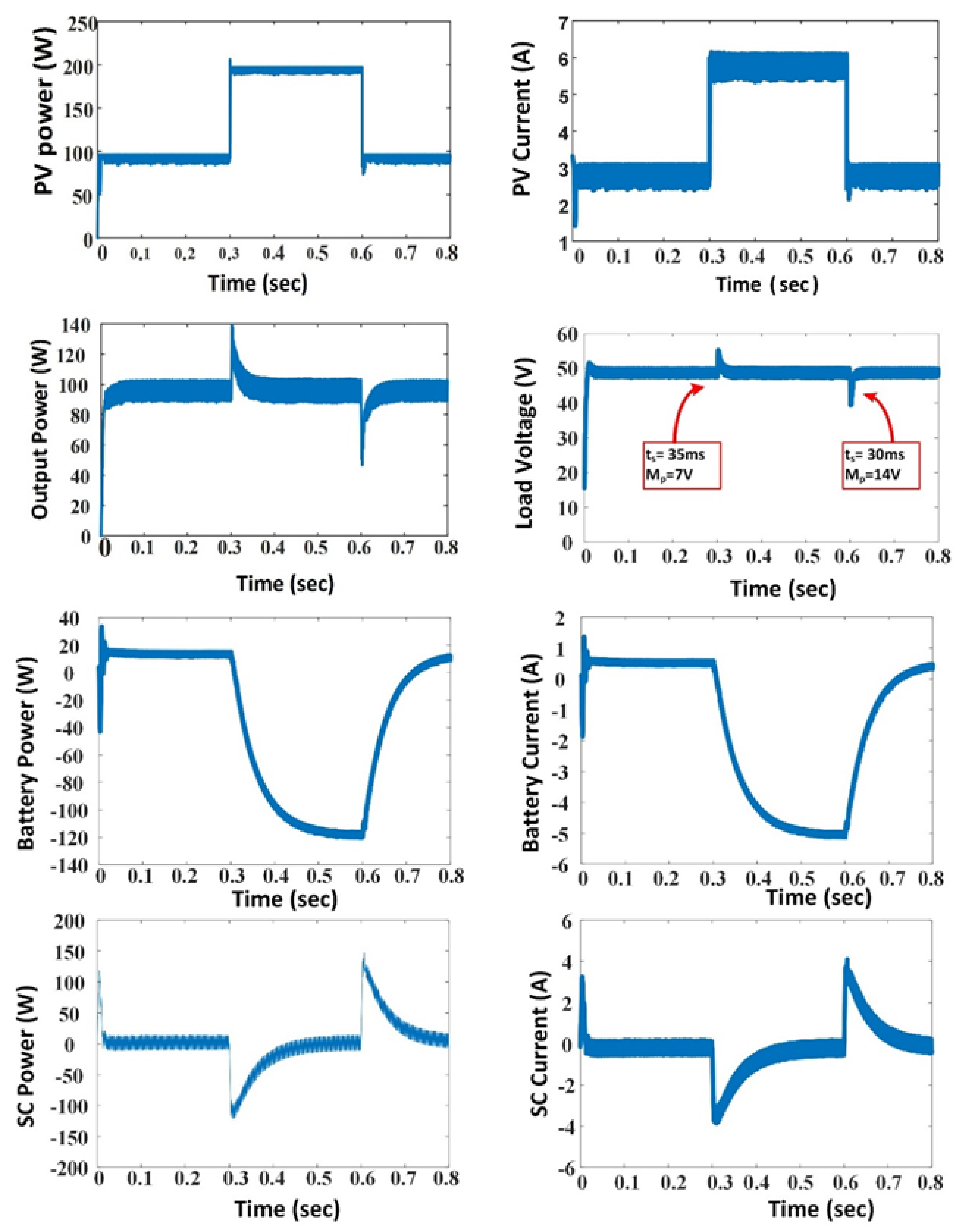
5.1. Step Increase in PV Generation
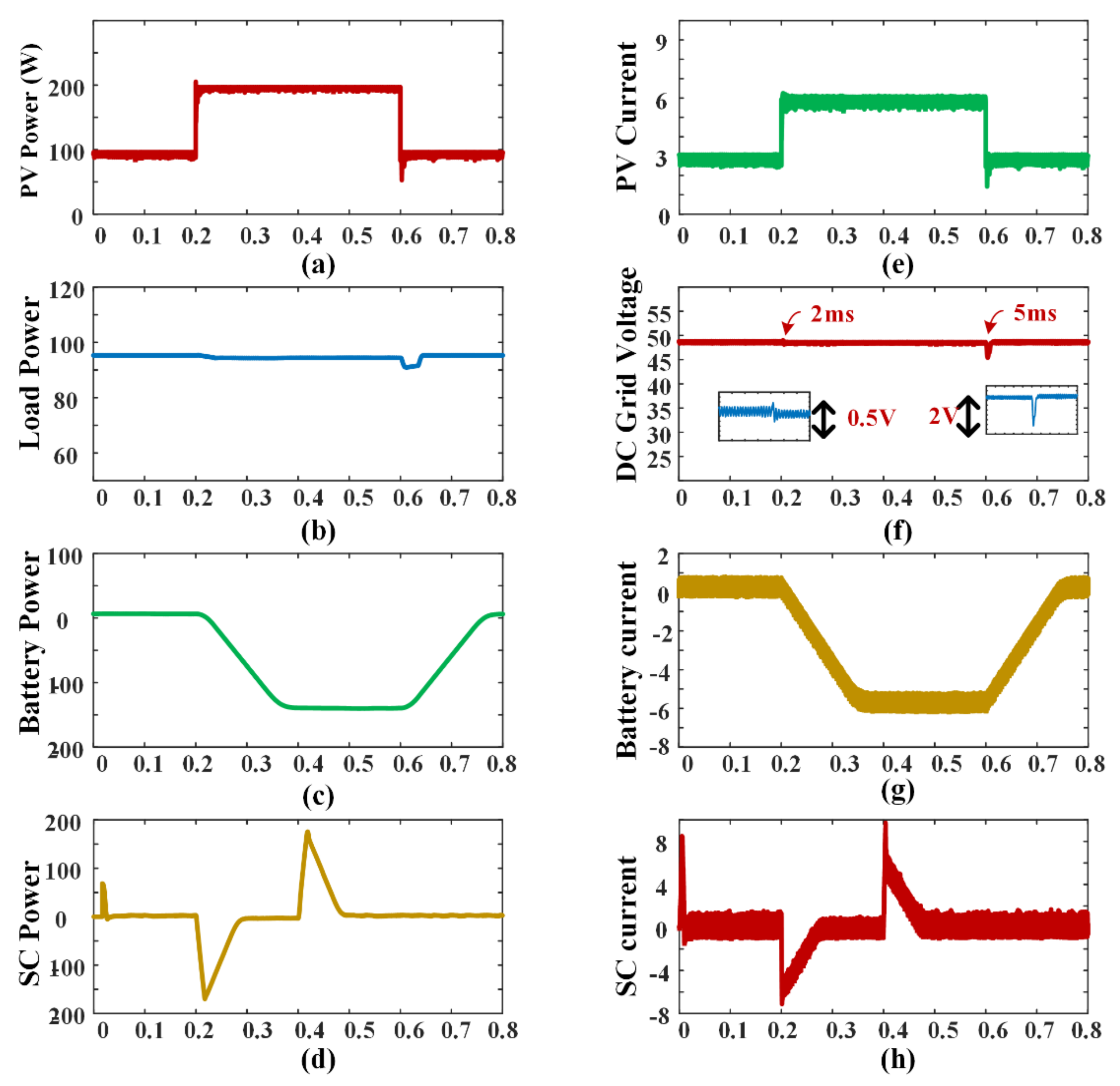
5.2. Step Decrease in PV Generation
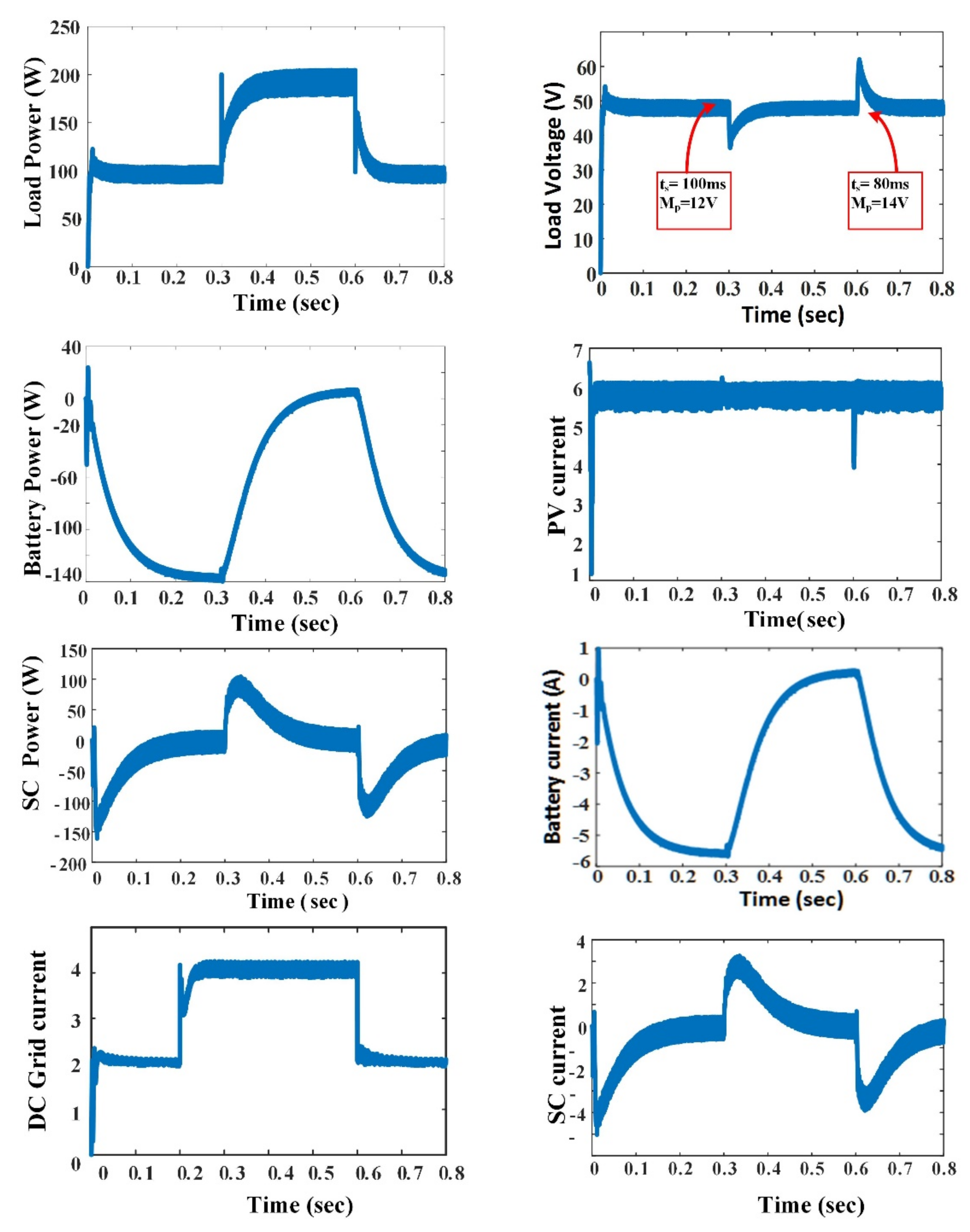
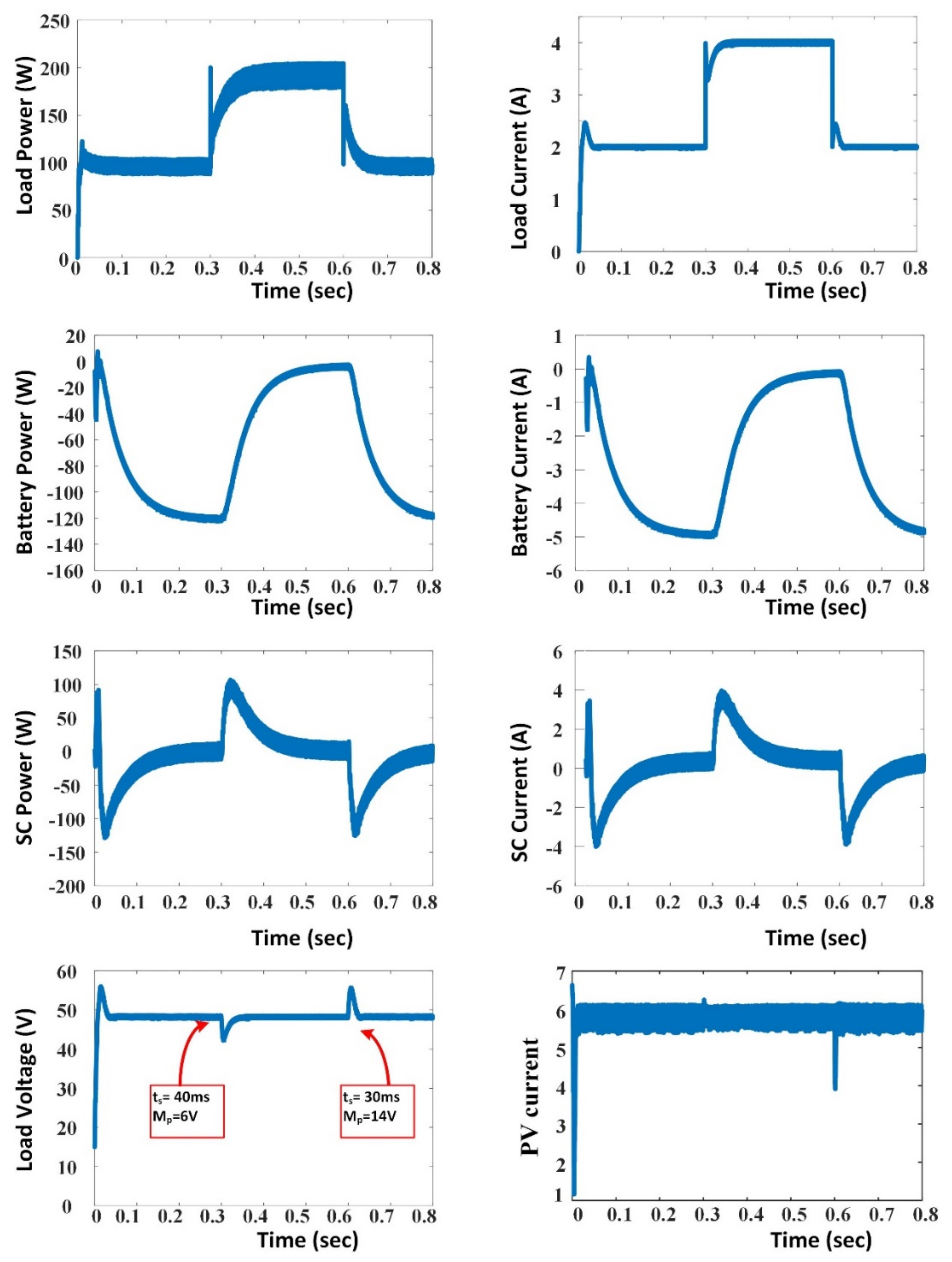
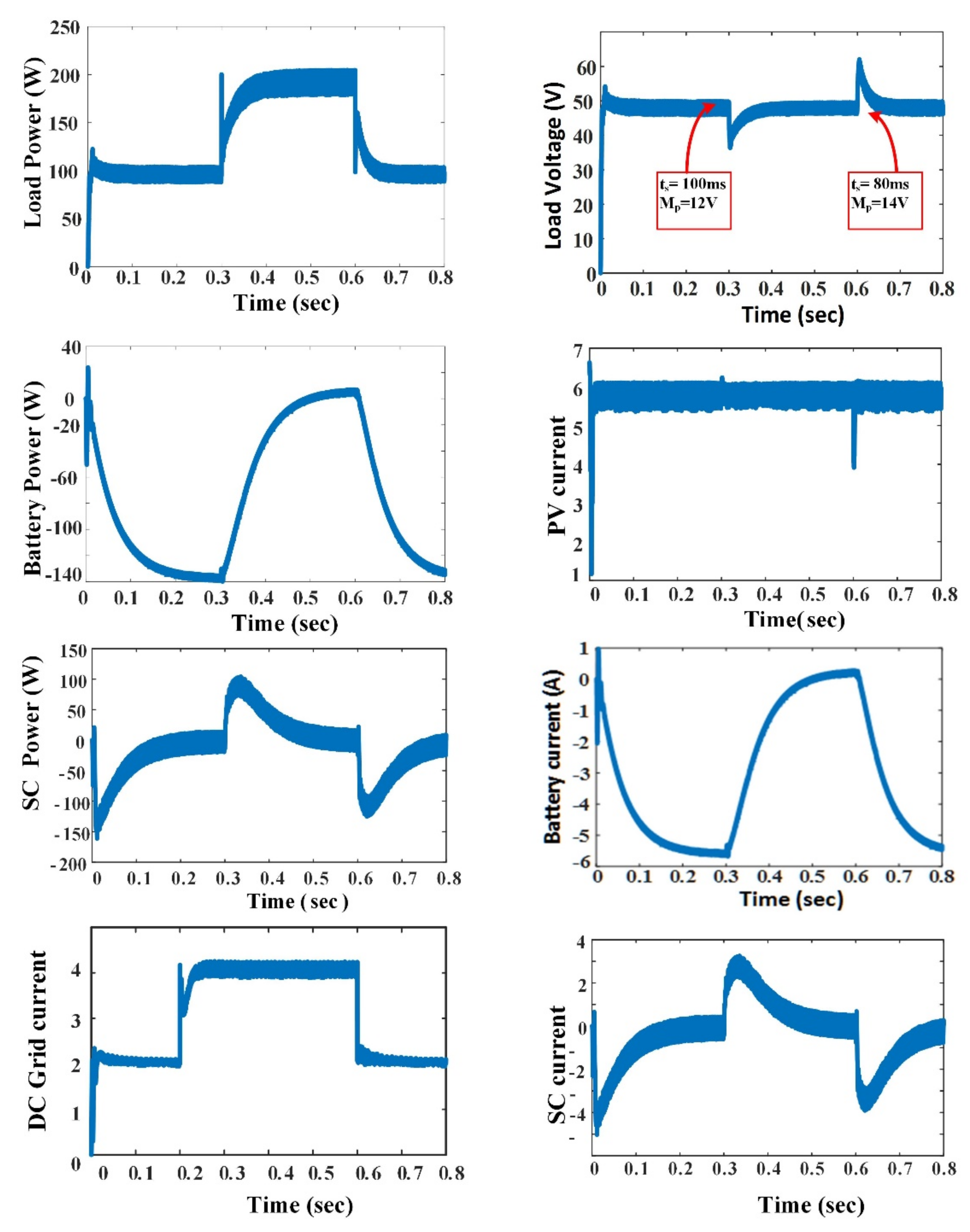
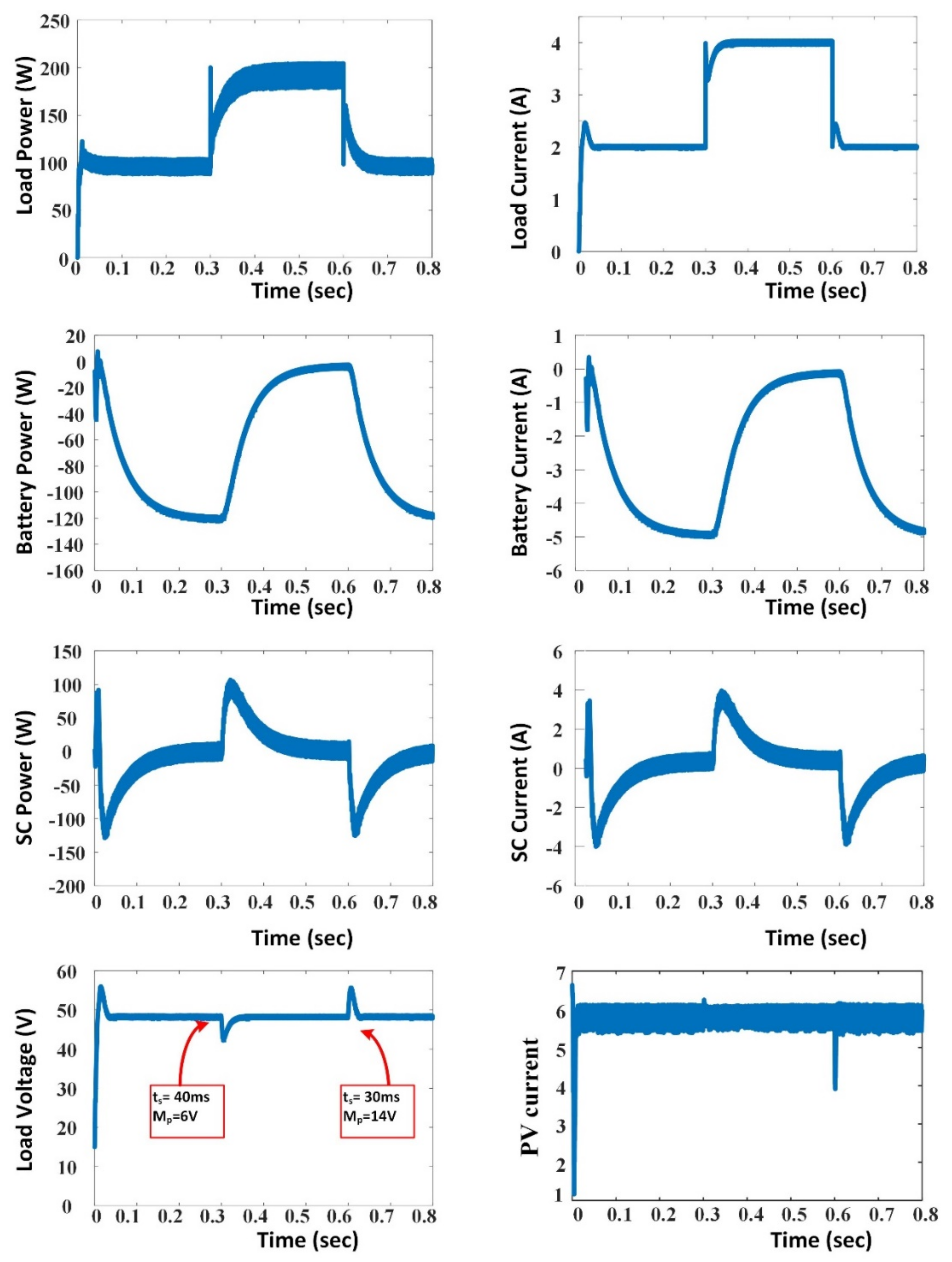
5.3. Step Increase in Load Demand
5.4. Step Decrease in Load Demand
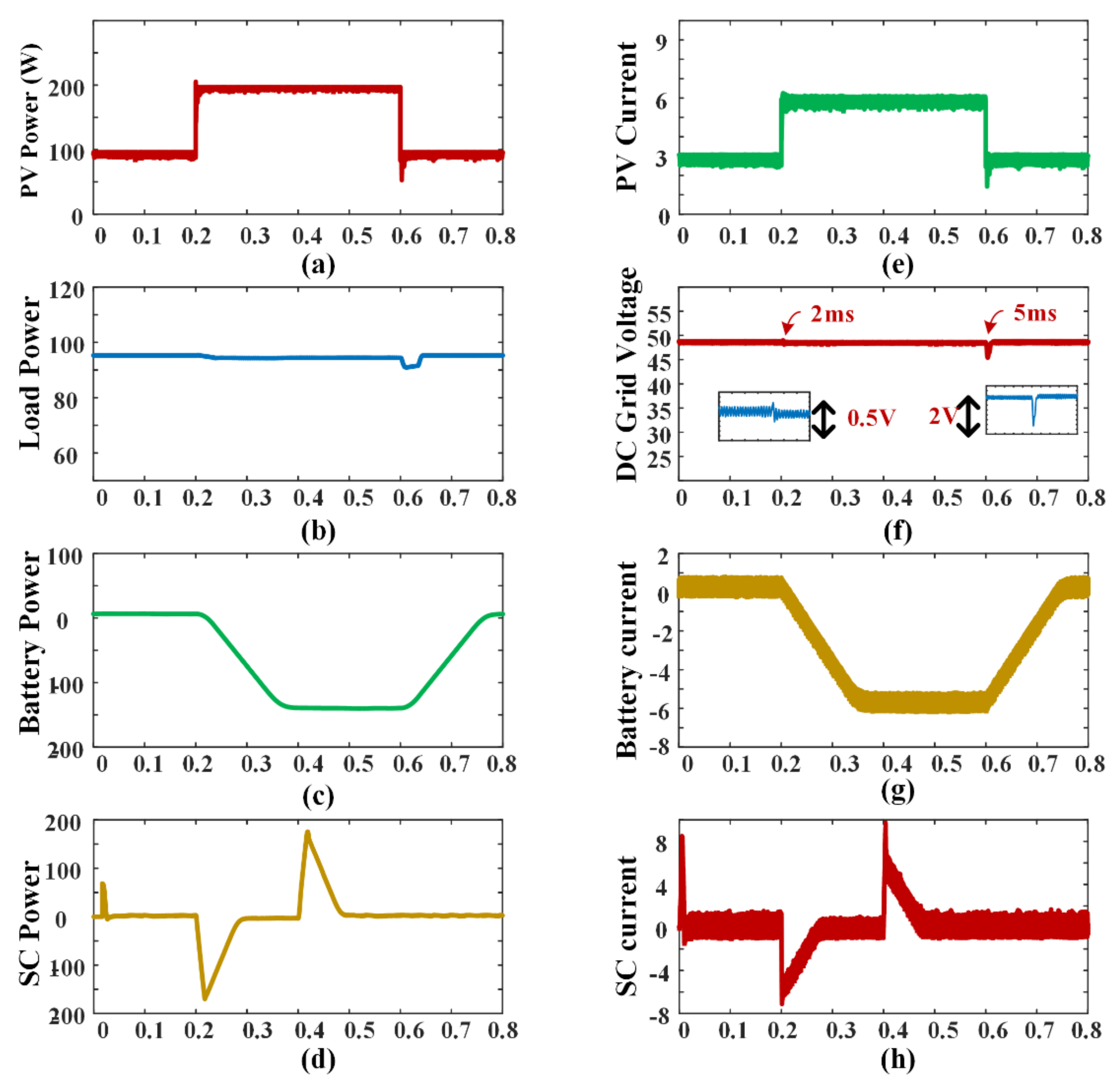
5.5. Step Change in PV Generation for Predictive PI Control Scheme
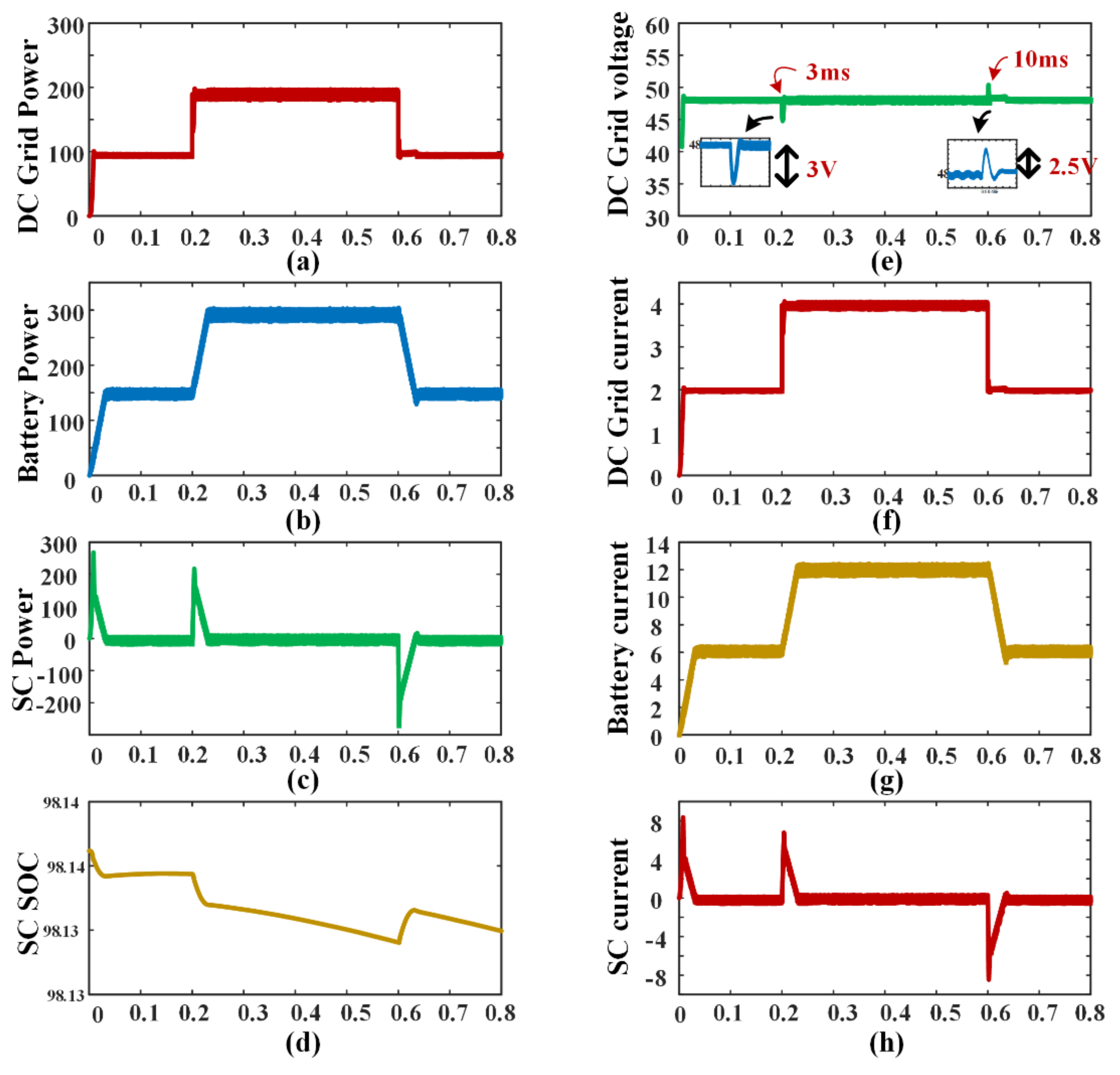
5.6. Step Change in Load Demand
5.7. Comparative Performance Evaluation
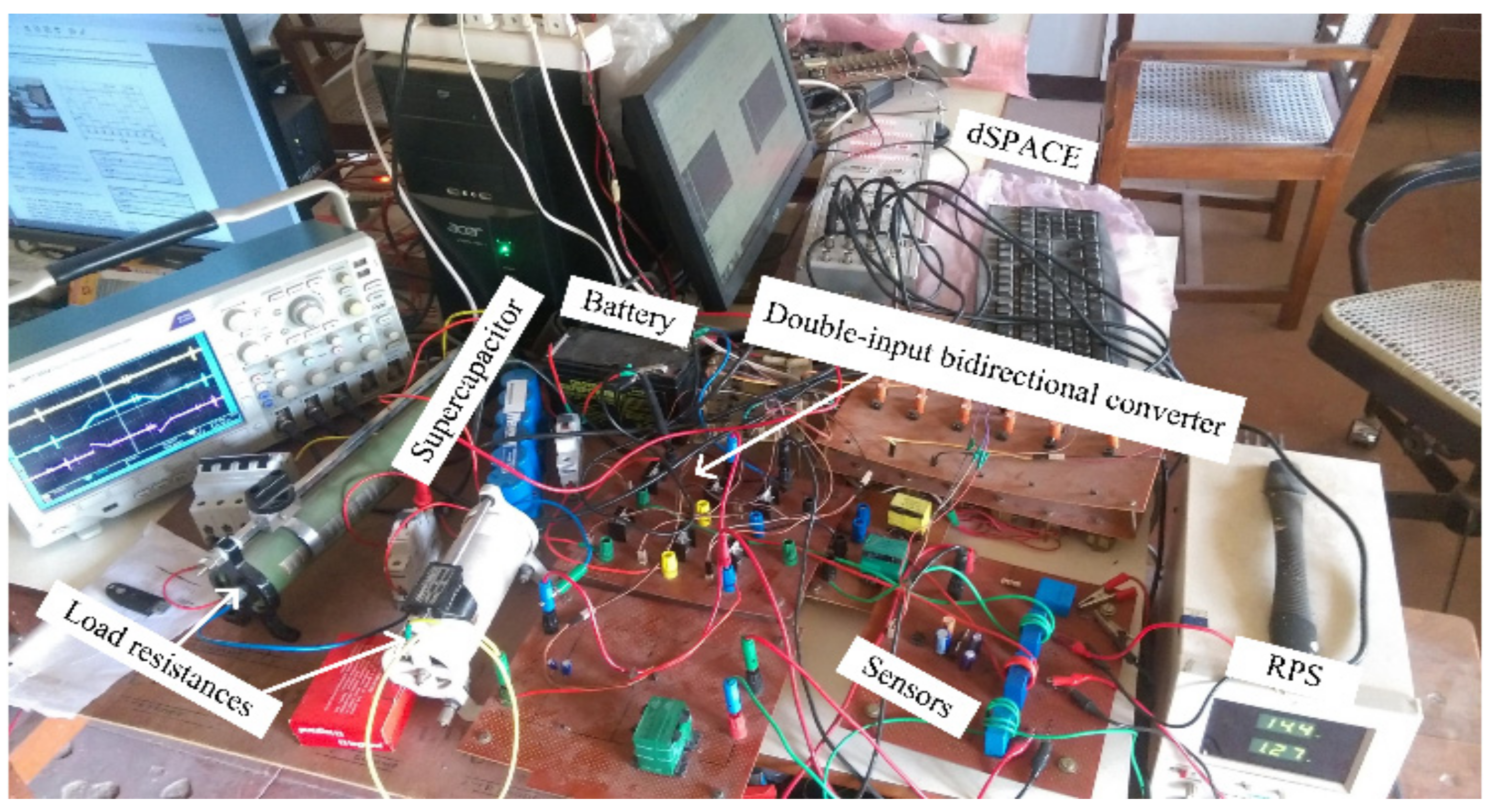
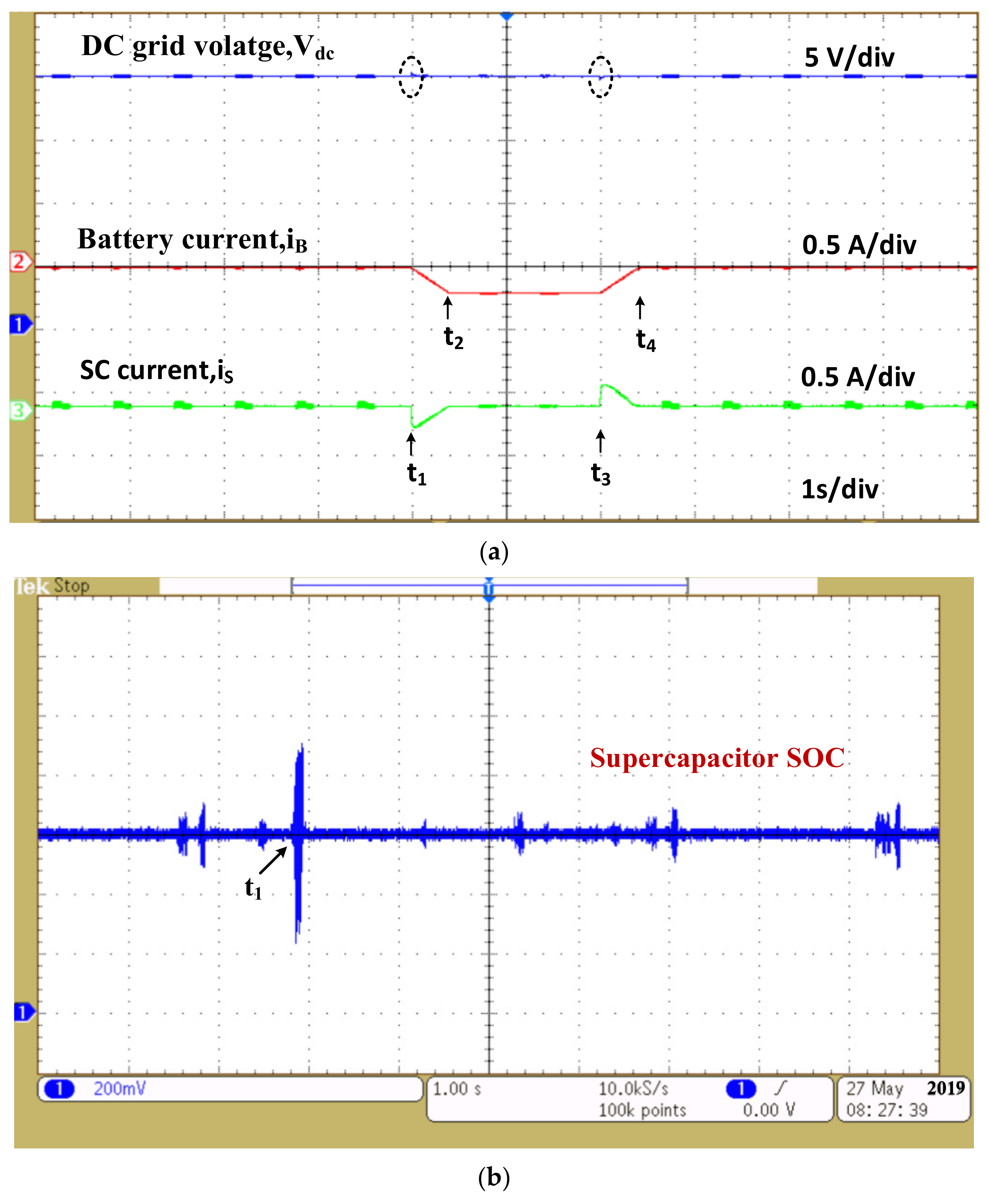
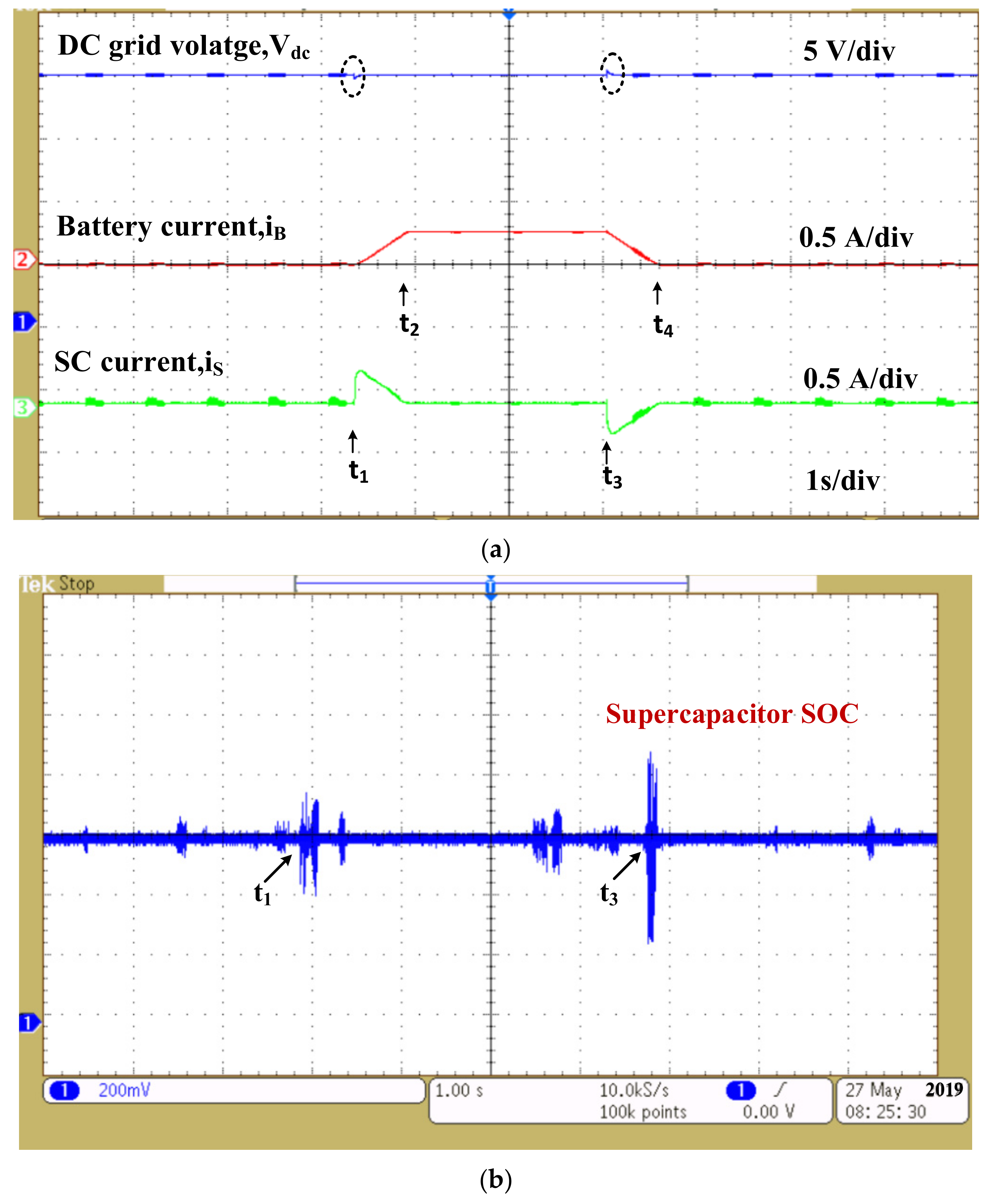
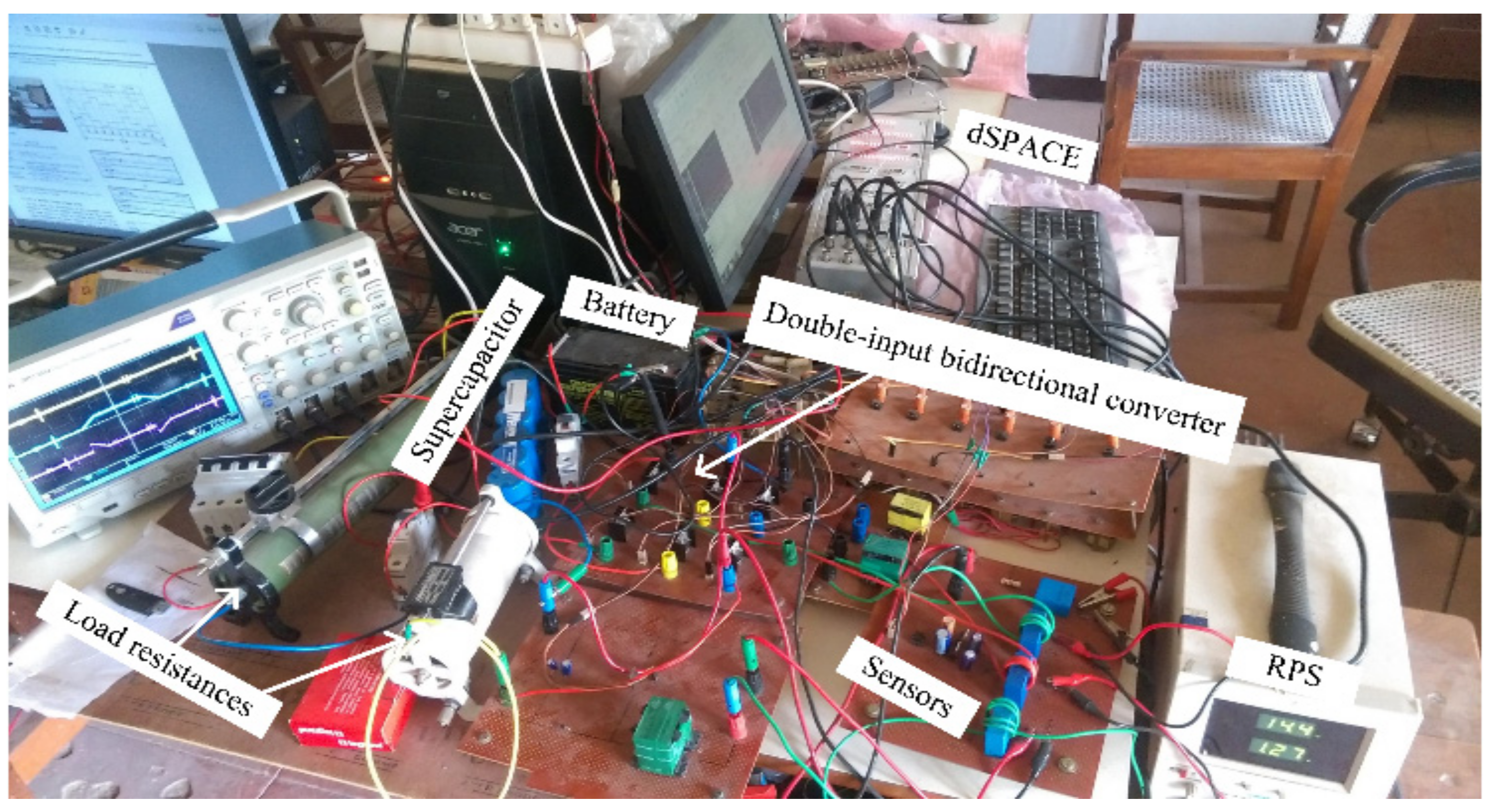
6. Experimental Results
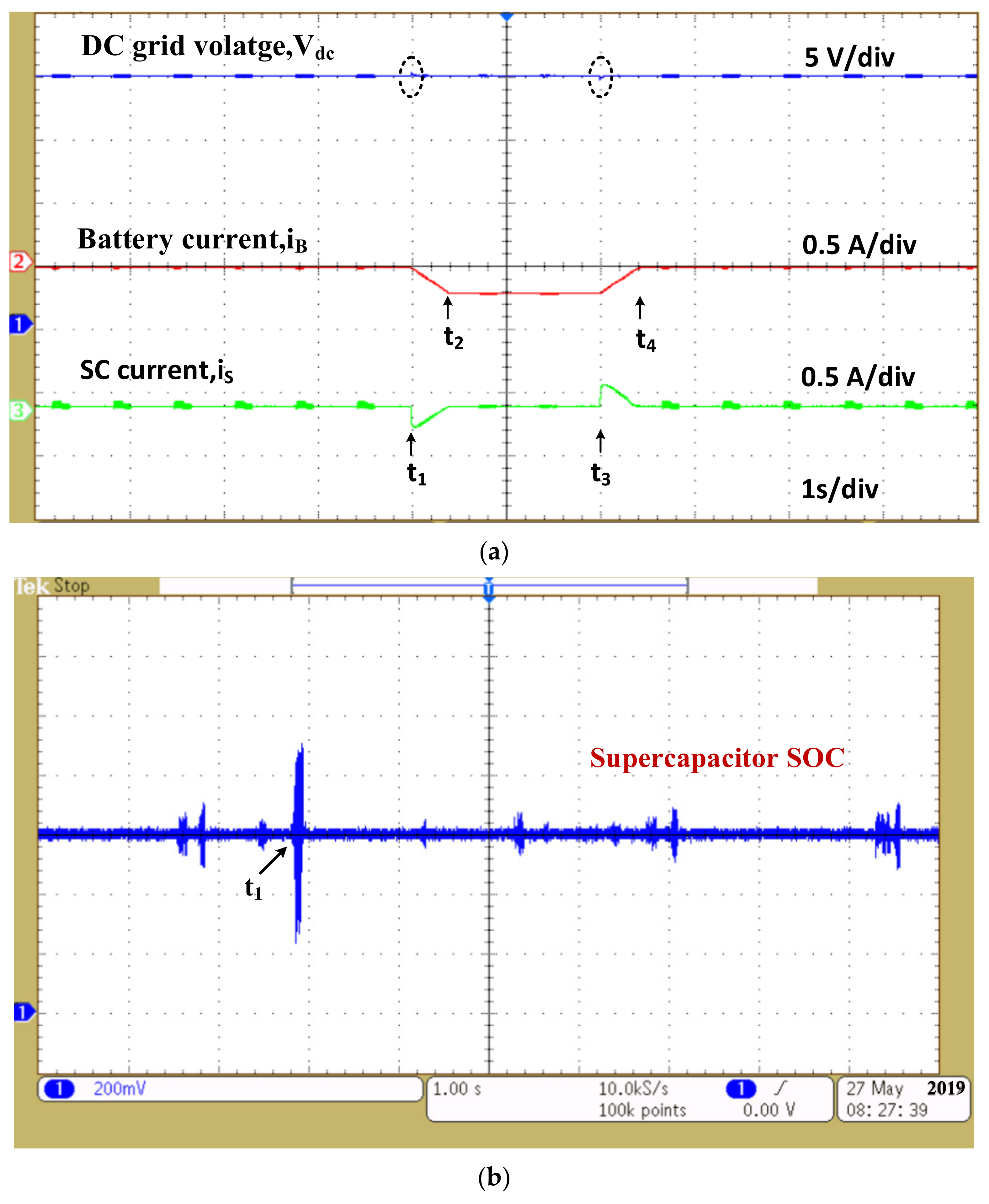
6.1. HESS Charging Mode
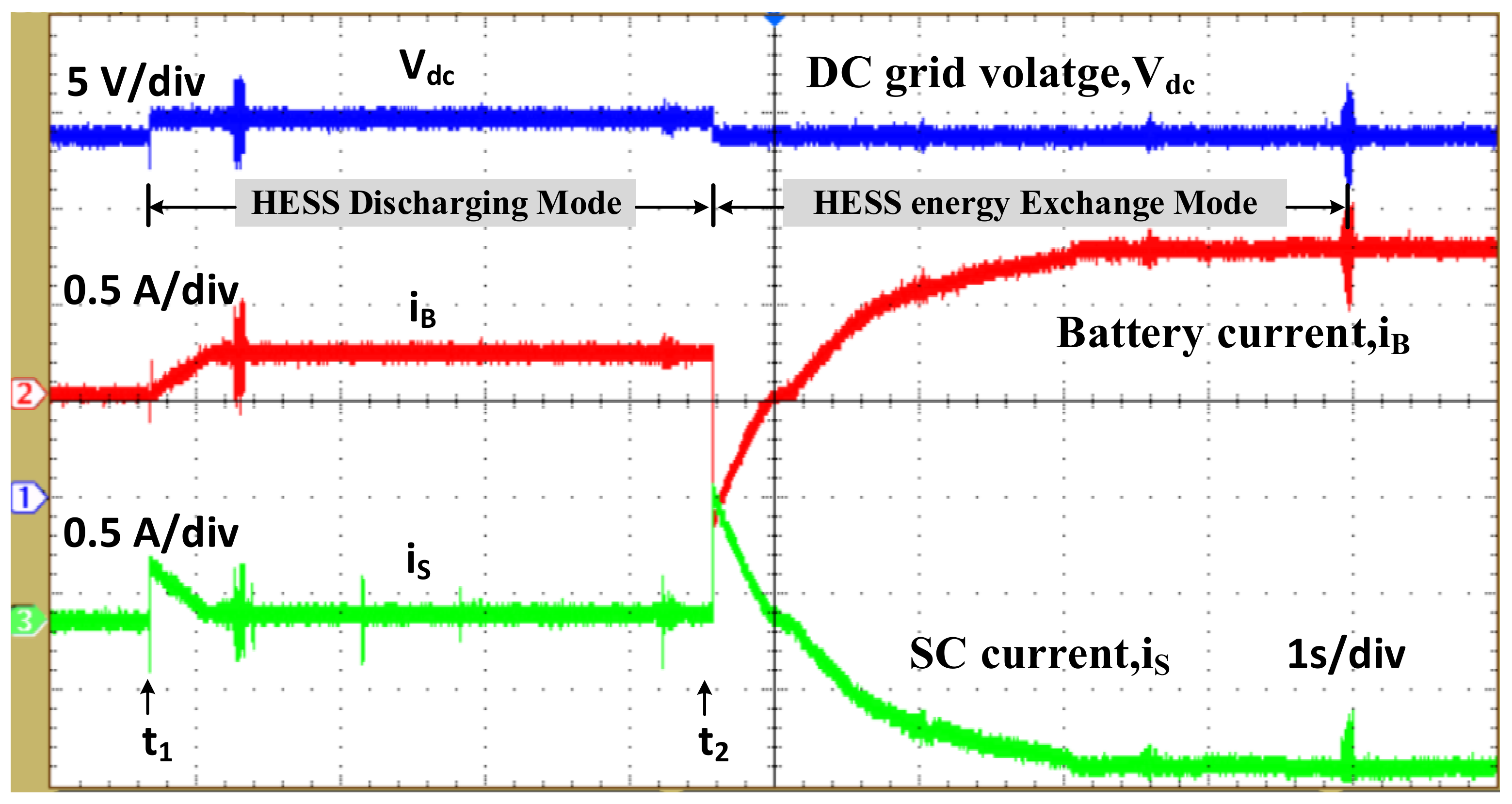
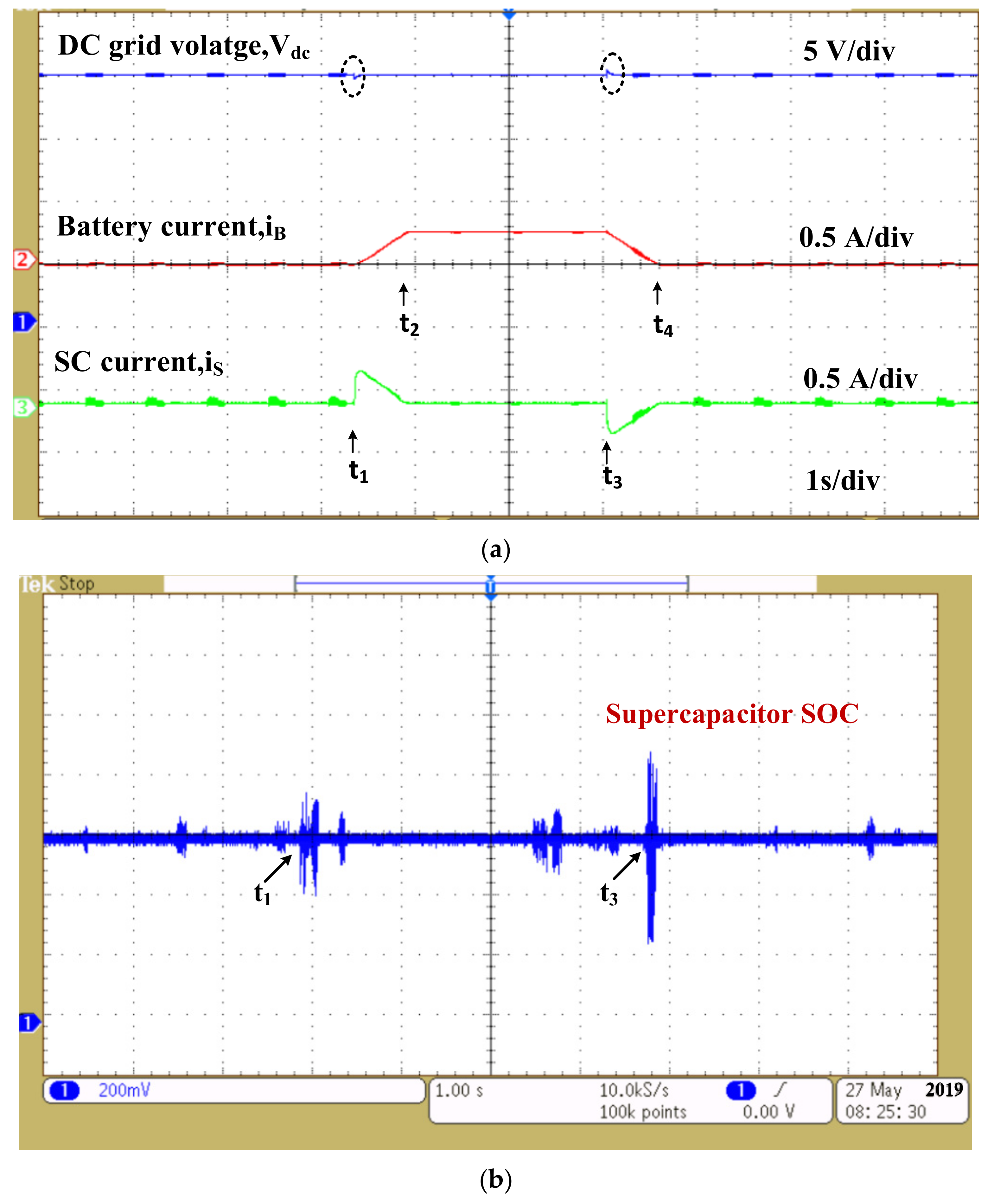
6.2. HESS Discharging Mode
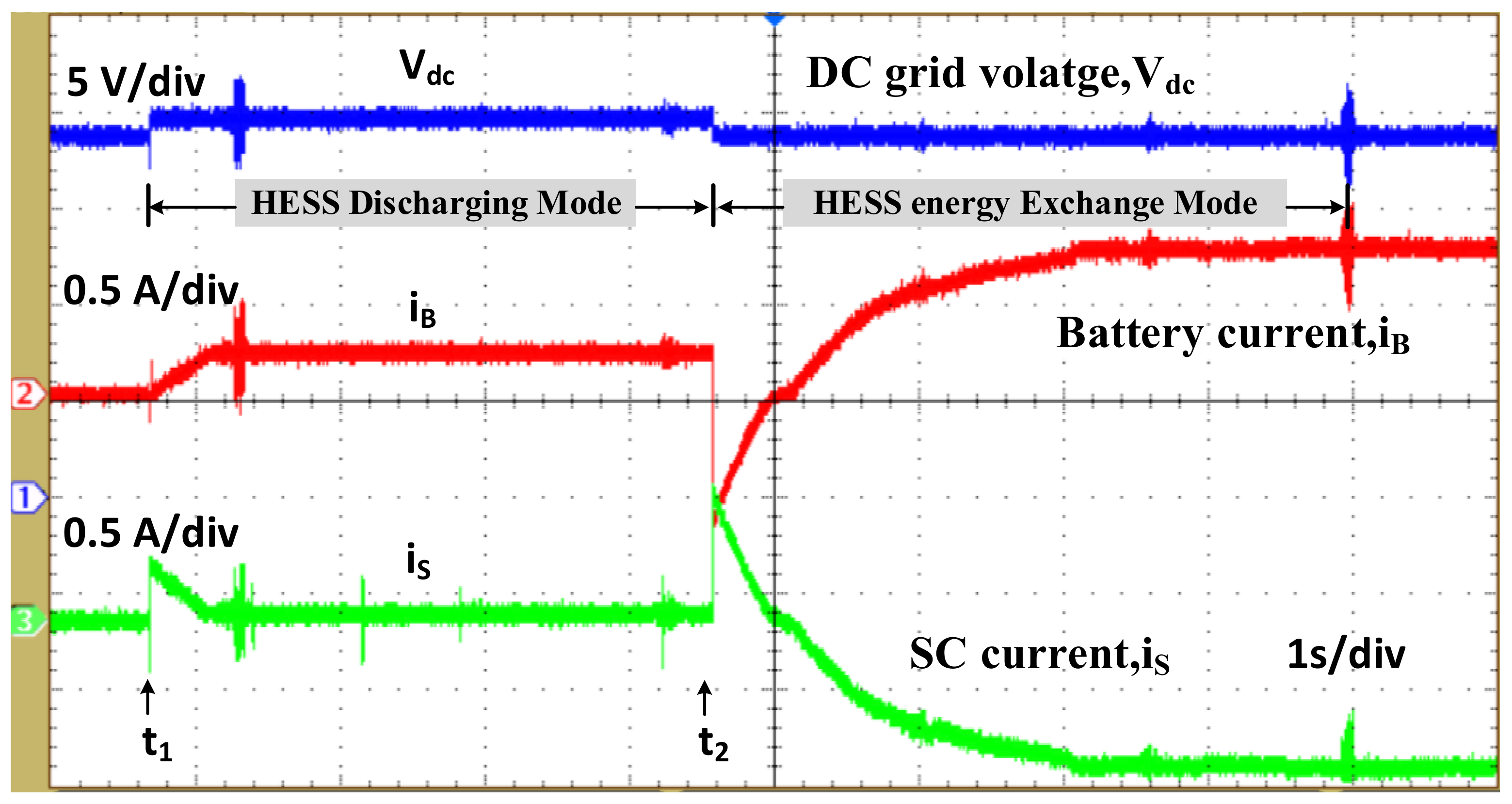
6.3. HESS Energy Exchange Mode
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Symbols
| dB | Battery duty cycle |
| dSC | SC duty cycle |
| fsw | Switching frequency |
| iB | Battery current |
| iB,ref | Battery reference current |
| iSC | SC current |
| iSC,ref | SC reference current |
| VDC | DC Microgrid voltage |
| VDC,ref | DC grid reference voltage |
| VB | Battery voltage |
| Vsc | Supercapacitor voltage |
| LB | Battery inductance |
| Lsc | Supercapacitor inductance |
| SoCi | Supercapacitor’s initial state of charge |
| Qsc | Rated charge for Supercapacitor |
| itot | Total current from ESS |
| IHIGH | High-frequency component of current |
| ILOW | Low-frequency component of current |
| Pstd | Steady-state power component |
| Ptran | Transient power component |
| Pdc(t) | DC grid power |
| Pren(t) | RES power |
| Pb(t) | Battery power |
| Psc(t) | SC power |
| Kp,v | Proportional constant of the outer voltage loop |
| Ki,v | Integral constant of the outer voltage loop |
| verr | Voltage error |
| PB_un | Uncompensated power from the battery system |
| iB,err | Battery error current |
| ∆iL | Peak-to-peak inductor current |
| Gisc dSC | Control-to-SC current transfer function |
| GVDCiSC | SC current-to-output voltage transfer function |
| Gpi_iS | PI controller transfer function of inner SC current loop |
| Gpi_v | PI controller transfer function of the outer voltage control loop |
| GiBdB | Control-to-battery current transfer function |
| Gpi_iB | PI controller transfer function of battery current loop |
| Idc(k) | Total load current |
| Vdc(k) | Present sampling DC Microgrid voltage |
| Vsc(k) | Present sampling SC voltage |
| Isc(k) | Present sampling SC current |
| VB(k) | Present sampling battery voltage |
| iB(k) | Present sampling battery current |
| iB(k+1) | Prediction of battery current |
| Isc(k+1) | Prediction of SC current |
| iC | Charging current |
| Rate of change of DC grid voltage | |
| Ts | Sampling period |
| Rate of change of battery current | |
| Rate of change of SC current | |
| db(i) | Iteratively calculated battery duty cycle |
| dSc(i) | Iteratively calculated SC duty cycle |
| J | Objective function of MPC |
References
- Xiao, J.; Wang, P.; Setyawan, L. Implementation of Multiple-Slack-Terminal DC Microgrids for Smooth Transitions Between Grid-Tied and Islanded States. IEEE Trans. Smart Grid 2016, 7, 273–281. [Google Scholar] [CrossRef]
- Zadeh, M.K.; Gavagsaz-Ghoachani, R.; Pierfederici, S.; Nahid-Mobarakeh, B.; Molinas, M. Stability Analysis and Dynamic Performance Evaluation of a Power Electronics-Based DC Distribution System With Active Stabilizer. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 93–102. [Google Scholar] [CrossRef]
- Graditi, G.; Ippolito, M.G.; Telaretti, E.; Zizzo, G. An Innovative Conversion Device to the Grid Interface of Combined RES-Based Generators and Electric Storage Systems. IEEE Trans. Ind. Electron. 2015, 62, 2540–2550. [Google Scholar] [CrossRef]
- Choi, M.E.; Kim, S.W.; Seo, S.W. Energy Management Optimization in a Battery/Supercapacitor Hybrid Energy Storage System. IEEE Trans. Smart Grid 2012, 3, 463–472. [Google Scholar] [CrossRef]
- Feng, X.; Gooi, H.B.; Chen, S.X. Hybrid Energy Storage with Multimode Fuzzy Power Allocator for PV Systems. IEEE Trans. Sustain. Energy 2014, 5, 389–397. [Google Scholar] [CrossRef]
- Gao, L.; Dougal, R.A.; Liu, S. Power enhancement of an actively controlled battery/ultracapacitor hybrid. IEEE Trans. Power Electron. 2005, 20, 236–243. [Google Scholar] [CrossRef]
- Gee, M.; Robinson, F.V.P.; Dunn, R.W. Analysis of Battery Lifetime Extension in a Small-Scale Wind-Energy System Using Supercapacitors. IEEE Trans. Energy Convers. 2013, 28, 24–33. [Google Scholar] [CrossRef]
- Zheng, J.P.; Jow, T.R.; Ding, M.S. Hybrid power sources for pulsed current applications. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 288–292. [Google Scholar] [CrossRef]
- Lee, N.; Nee, C.H.; Yap, S.S.; Tham, K.K.; You, A.H.; Yap, S.L.; Mohd Arof, A.K.B. Capacity Sizing of Embedded Control Battery–Supercapacitor Hybrid Energy Storage System. Energies 2022, 15, 3783. [Google Scholar] [CrossRef]
- Zdiri, M.A.; Guesmi, T.; Alshammari, B.M.; Alqunun, K.; Almalaq, A.; Salem, F.B.; Hadj Abdallah, H.; Toumi, A. Design and Analysis of Sliding-Mode Artificial Neural Network Control Strategy for Hybrid PV-Battery-Supercapacitor System. Energies 2022, 15, 4099. [Google Scholar] [CrossRef]
- Mounica, V.; Obulesu, Y.P. Hybrid Power Management Strategy with Fuel Cell, Battery, and Supercapacitor for Fuel Economy in Hybrid Electric Vehicle Application. Energies 2022, 15, 4185. [Google Scholar] [CrossRef]
- Lencwe, M.J.; Chowdhury, S.P.D.; Olwal, T.O. An Effective Control for Lead-Acid Performance Enhancement in a Hybrid Battery-Supercapacitor System Used in Transport Vehicles. Sustainability 2021, 13, 13971. [Google Scholar] [CrossRef]
- Inthamoussou, F.A.; Pegueroles-Queralt, J.; Bianchi, F.D. Control of a Supercapacitor Energy Storage System for Microgrid Applications. IEEE Trans. Energy Convers. 2013, 28, 690–697. [Google Scholar] [CrossRef]
- Laldin, O.; Moshirvaziri, M.; Trescases, O. Predictive Algorithm for Optimizing Power Flow in Hybrid Ultracapacitor/Battery Storage Systems for Light Electric Vehicles. IEEE Trans. Power Electron. 2013, 28, 3882–3895. [Google Scholar] [CrossRef]
- Wang, B.; Xian, L.; Manandhar, U.; Ye, J.; Ukil, A.; Gooi, H.B. A stand-alone hybrid pv/fuel cell power systems using single-inductor dual-input single-output boost converter with model predictive control. In Proceedings of the 2017 Asian Conference on Energy, Power and Transportation Eletrification (ACEPT), Singapore, 24–26 October 2017; pp. 1–5. [Google Scholar]
- Zhao, C.; Round, S.D.; Kolar, J.W. An Isolated Three-Port Bidirectional DC-DC Converter With Decoupled Power Flow Management. IEEE Trans. Power Electron. 2008, 23, 2443–2453. [Google Scholar] [CrossRef]
- Zeng, J.; Qiao, W.; Qu, L.; Jiao, Y. An Isolated Multiport DC–DC Converter for Simultaneous Power Management of Multiple Different Renewable Energy Sources. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 70–78. [Google Scholar] [CrossRef]
- Wang, Y.; Han, F.; Yang, L.; Xu, R.; Liu, R. A Three-Port Bidirectional Multi-Element Resonant Converter With Decoupled Power Flow Management for Hybrid Energy Storage Systems. IEEE Access 2018, 6, 61331–61341. [Google Scholar] [CrossRef]
- Yang, P.; Tse, C.K.; Xu, J.; Zhou, G. Synthesis and Analysis of Double-Input Single-Output DC/DC Converter. IEEE Trans. Ind. Electron. 2015, 62, 6284–6295. [Google Scholar] [CrossRef]
- Khaligh, A.; Cao, J.; Lee, Y.J. A Multiple-Input DC–DC Converter Topology. IEEE Trans. Power Electron. 2009, 24, 862–868. [Google Scholar] [CrossRef]
- Wang, B.; Xian, L.; Manandhar, U.; Ye, J.; Zhang, X.; Gooi, H.B.; Ukil, A. Hybrid energy storage system using bidirectional single-inductor multipleport converter with model predictive control in DC microgrids. Electr. Power Syst. Res. 2019, 173, 38–47. [Google Scholar] [CrossRef]
- Faraji, R.; Farzanehfard, H. Soft-switching Nonisolated High step-up three-port DC-DC converter for Hybrid energy systems. IEEE Trans. Power Electron. 2018, 33, 10101–10111. [Google Scholar] [CrossRef]
- Mothilal Bhagavathy, S.; Pillai, G. PV Microgrid Design for Rural Electrification. Designs 2018, 2, 33. [Google Scholar] [CrossRef] [Green Version]
- Sato, Y.; Uno, M.; Nagata, H. Nonisolated Multiport Converters Based on Integration of PWM Converter and Phase-Shift-Switched Capacitor Converter. IEEE Trans. Power Electron. 2020, 35, 455–470. [Google Scholar] [CrossRef]
- Yi, Z.; Dong, W.; Etemadi, A.H. A Unified Control and Power Management Scheme for PV-Battery-Based Hybrid Microgrids for Both Grid-Connected and Islanded Modes. IEEE Trans. Smart Grid 2017, 9, 5975–5985. [Google Scholar] [CrossRef]
- Behjati, H.; Davoudi, A. Power Budgeting Between Diversified Energy Sources and Loads Using a Multiple-Input Multiple-Output DC-DC Converter. IEEE Trans. Ind. Appl. 2013, 49, 2761–2772. [Google Scholar] [CrossRef]
- Filsoof, K.; Lehn, P.W. A Bidirectional Multiple-Input Multiple-Output Modular Multilevel DC-DC Converter and its Control Design. IEEE Trans. Power Electron. 2016, 31, 2767–2779. [Google Scholar] [CrossRef]
- Wai, R.J.; Lin, C.Y.; Chen, B.H. High-Efficiency DC-DC Converter with Two Input Power Sources. IEEE Trans. Power Electron. 2012, 27, 1862–1875. [Google Scholar] [CrossRef]
- Nejabatkhah, F.; Danyali, S.; Hosseini, S.H.; Sabahi, M.; Niapour, S.M. Modeling and Control of a New Three-Input DC–DC Boost Converter for Hybrid PV/FC/Battery Power System. IEEE Trans. Power Electron. 2012, 27, 2309–2324. [Google Scholar] [CrossRef]
- Wai, R.J.; Chen, B.H. High-Efficiency Dual-Input Interleaved DC-DC Converter for Reversible Power Sources. IEEE Trans. Power Electron. 2014, 29, 2903–2921. [Google Scholar] [CrossRef]
- Chen, C.W.; Liao, C.Y.; Chen, K.H.; Chen, Y.M. Modeling and Controller Design of a Semiisolated Multiinput Converter for a Hybrid PV/Wind Power Charger System. IEEE Trans. Power Electron. 2015, 30, 4843–4853. [Google Scholar] [CrossRef]
- Danyali, S.; Hosseini, S.H.; Gharehpetian, G.B. New Extendable Single-Stage Multi-input DC–DC/AC Boost Converter. IEEE Trans. Power Electron. 2014, 29, 775–788. [Google Scholar] [CrossRef]
- Guo, F.; Fu, L.; Zhang, X.; Yao, C.; Li, H.; Wang, J. A Family of Quasi-Switched-Capacitor Circuit-Based Dual-Input DC/DC Converters for Photovoltaic Systems Integrated With Battery Energy Storage. IEEE Trans. Power Electron. 2016, 31, 8237–8246. [Google Scholar] [CrossRef]
- Gummi, K.; Ferdowsi, M. Double-Input DC–DC Power Electronic Converters for Electric-Drive Vehicles—Topology Exploration and Synthesis Using a Single-Pole Triple-Throw Switch. IEEE Trans. Ind. Electron. 2010, 57, 617–623. [Google Scholar] [CrossRef]
- Karpana, S.; Batzelis, E.; Maiti, S.; Chakraborty, C. PV-Supercapacitor Cascaded Topology for Primary Frequency Responses and Dynamic Inertia Emulation. Energies 2021, 14, 8347. [Google Scholar] [CrossRef]
- Ahrabi, R.R.; Ardi, H.; Elmi, M.; Ajami, A. A Novel Step-Up Multiinput DC–DC Converter for Hybrid Electric Vehicles Application. IEEE Trans. Power Electron. 2017, 32, 3549–3561. [Google Scholar] [CrossRef]
- Akar, F.; Tavlasoglu, Y.; Ugur, E.; Vural, B.; Aksoy, I. A Bidirectional Nonisolated Multi-Input DC–DC Converter for Hybrid Energy Storage Systems in Electric Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 7944–7955. [Google Scholar] [CrossRef]
- Nahavandi, A.; Hagh, M.T.; Sharifian, M.B.B.; Danyali, S. A Nonisolated Multiinput Multioutput DC–DC Boost Converter for Electric Vehicle Applications. IEEE Trans. Power Electron. 2015, 30, 1818–1835. [Google Scholar] [CrossRef]
- Hintz, A.; Prasanna, U.R.; Rajashekara, K. Novel Modular Multiple-Input Bidirectional DC–DC Power Converter (MIPC) for HEV/FCV Application. IEEE Trans. Ind. Electron. 2015, 62, 3163–3172. [Google Scholar] [CrossRef]
- Punna, S.; Mailugundla, R.; Salkuti, S.R. Design, Analysis and Implementation of Bidirectional DC–DC Converters for HESS in DC Microgrid Applications. Smart Cities 2022, 5, 433–454. [Google Scholar] [CrossRef]
- Kachhwaha, A.; Rashed, G.I.; Garg, A.R.; Mahela, O.P.; Khan, B.; Shafik, M.B.; Hussien, M.G. Design and Performance Analysis of Hybrid Battery and Ultracapacitor Energy Storage System for Electrical Vehicle Active Power Manage-ment. Sustainability 2022, 14, 776. [Google Scholar] [CrossRef]
- Hsieh, M.-F.; Chen, P.-H.; Pai, F.-S.; Weng, R.-Y. Development of Supercapacitor-Aided Hybrid Energy Storage System to Enhance Battery Life Cycle of Electric Vehicles. Sustainability 2021, 13, 7682. [Google Scholar] [CrossRef]
- Park, S.; Salkuti, S.R. Optimal Energy Management of Railroad Electrical Systems with Renewable Energy and Energy Storage Systems. Sustainability 2019, 11, 6293. [Google Scholar] [CrossRef] [Green Version]
- Kollimalla, S.K.; Mishra, M.K. A novel adaptive p & o mppt algorithm considering sudden changes in the irradiance. IEEE Trans. Energy Convers. 2014, 29, 602–610. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No | Specification Parameters | Value |
|---|---|---|
| 1 | Voltage at MPPT(Vmppt) | 32 V |
| 2 | Current of MPPT (Imppt) | 2 A |
| 3 | Power at MPPT (Pmppt) | 96 W |
| 3 | Supercapacitor voltage (VSC) | 32 V |
| 4 | Supercapacitor inductance (LS) | 0.355 mH |
| 5 | Battery voltage (VB) | 24 V |
| 6 | Inductance in Battery (LB) | 0.3 mH |
| 7 | Inductance in Boost converter (L) | 4.1 mH |
| 8 | Resistance (R) in the Converter | 4.8 Ω |
| 9 | Voltage in DC Microgrid (VDC) | 48 V |
| 10 | Capacitance (C) | 300 µF |
| Conventional PI | Proposed PI | Predictive PI | ||||
|---|---|---|---|---|---|---|
| Settling Time (tss) | %MP | Settling Time (tss) | %MP | Settling Time (tss) | %MP | |
| Step increase in PV generation | 100 ms | 22.9% | 35 ms | 14.58% | 2 ms | 0.01% |
| Step decrease in PV generation | 120 ms | 27% | 30 ms | 14.5% | 5 ms | 4.1% |
| Step increase in load demand | 100 ms | 25% | 40 ms | 12.5% | 3 ms | 6.25% |
| Step decrease in load demand | 80 ms | 29.16% | 30 ms | 16.6% | 10 ms | 5.2% |
| S. No | Parameters | Value |
|---|---|---|
| 1 | SC voltage (VSC) | 10 V |
| 2 | SC inductance (LS) | 1.43 mH |
| 3 | Battery voltage (VB) | 12 V |
| 4 | Battery inductance (LB) | 4.8 mH |
| 5 | Boost inductance (L) | 4.1 mH |
| 6 | Resistance (R) | 25 Ω |
| 7 | DC Microgrid voltage (VDC) | 20 V |
| 8 | Capacitance (C) | 150 µF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Punna, S.; Banka, S.; Salkuti, S.R. Optimal Energy Management Scheme of Battery Supercapacitor-Based Bidirectional Converter for DC Microgrid Applications. Information 2022, 13, 350. https://doi.org/10.3390/info13070350
Punna S, Banka S, Salkuti SR. Optimal Energy Management Scheme of Battery Supercapacitor-Based Bidirectional Converter for DC Microgrid Applications. Information. 2022; 13(7):350. https://doi.org/10.3390/info13070350
Chicago/Turabian StylePunna, Srinivas, Sujatha Banka, and Surender Reddy Salkuti. 2022. "Optimal Energy Management Scheme of Battery Supercapacitor-Based Bidirectional Converter for DC Microgrid Applications" Information 13, no. 7: 350. https://doi.org/10.3390/info13070350
APA StylePunna, S., Banka, S., & Salkuti, S. R. (2022). Optimal Energy Management Scheme of Battery Supercapacitor-Based Bidirectional Converter for DC Microgrid Applications. Information, 13(7), 350. https://doi.org/10.3390/info13070350