A Systematic Review of the Multi-Resolution Modeling (MRM) for Integration of Live, Virtual, and Constructive Systems



Abstract
1. Introduction
- What research has been done towards the MRM for integrating LVC systems?
- What are the research and technology challenges for the MRM implementation in the future?
2. Related Work
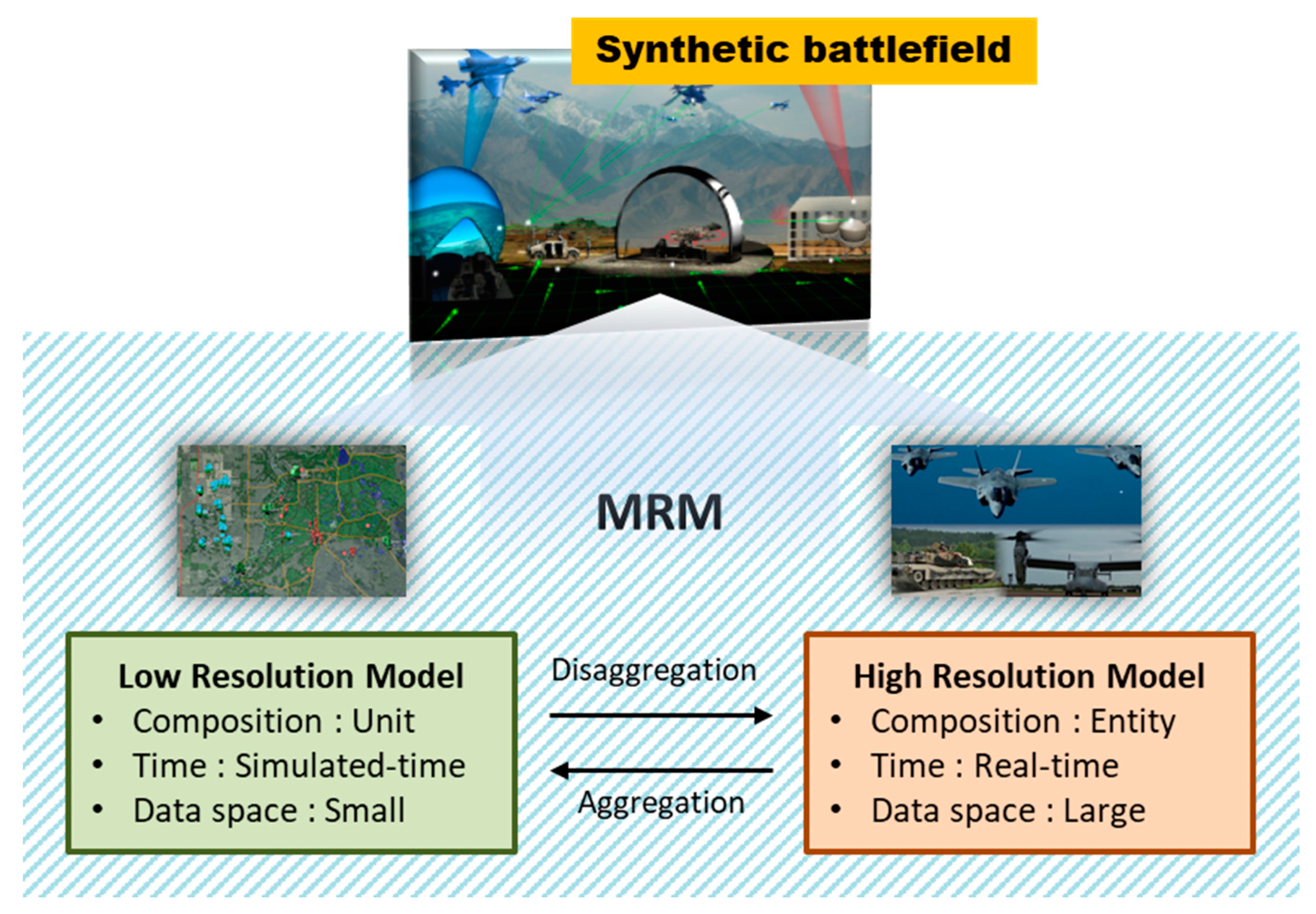
2.1. Multi-Resolution Modeling
2.2. Live, Virtual and Constructive (LVC) Systems
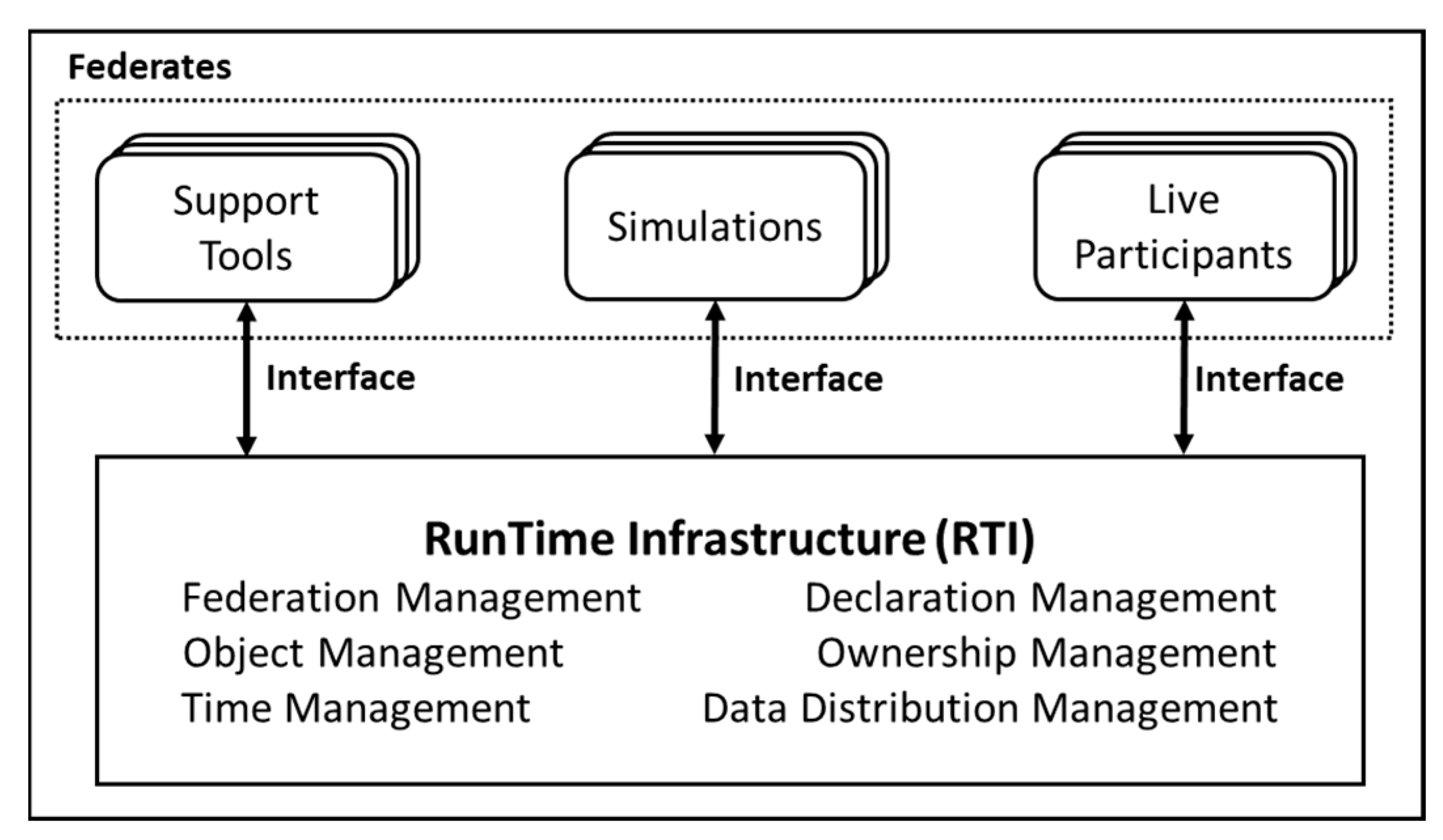
2.3. High-Level Architecture (HLA)
3. Systematic Review Method
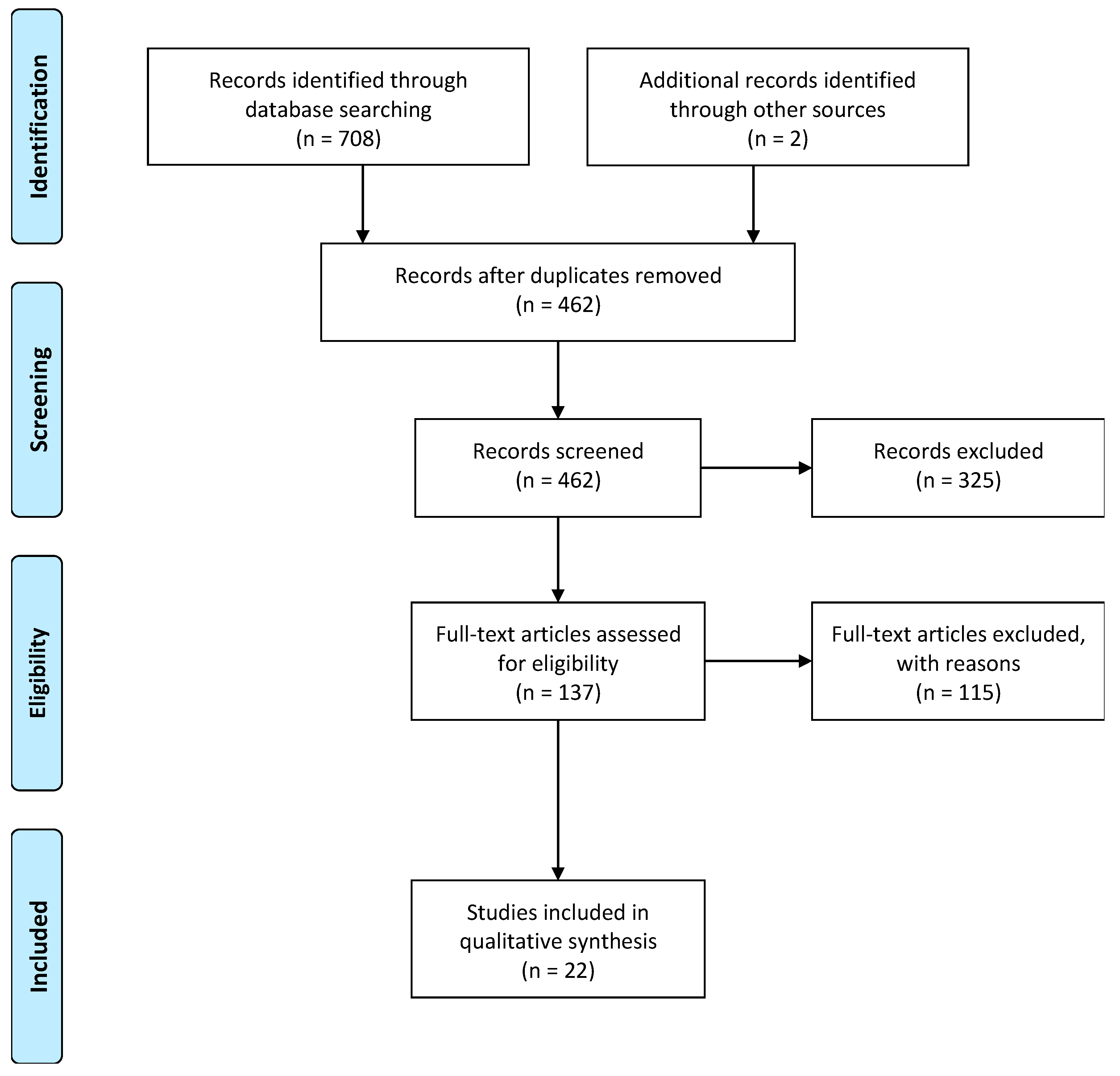
3.1. Study Selection
- Ei Compendex (Engineering village);
- IEEE Xplore;
- ABI/INFORM (ProQuest);
- Google Scholar.
- “multi resolution modeling”
- “multi resolution combat”
- “cross resolution modeling”
- “variable resolution modeling”
3.2. Review Process
4. Results
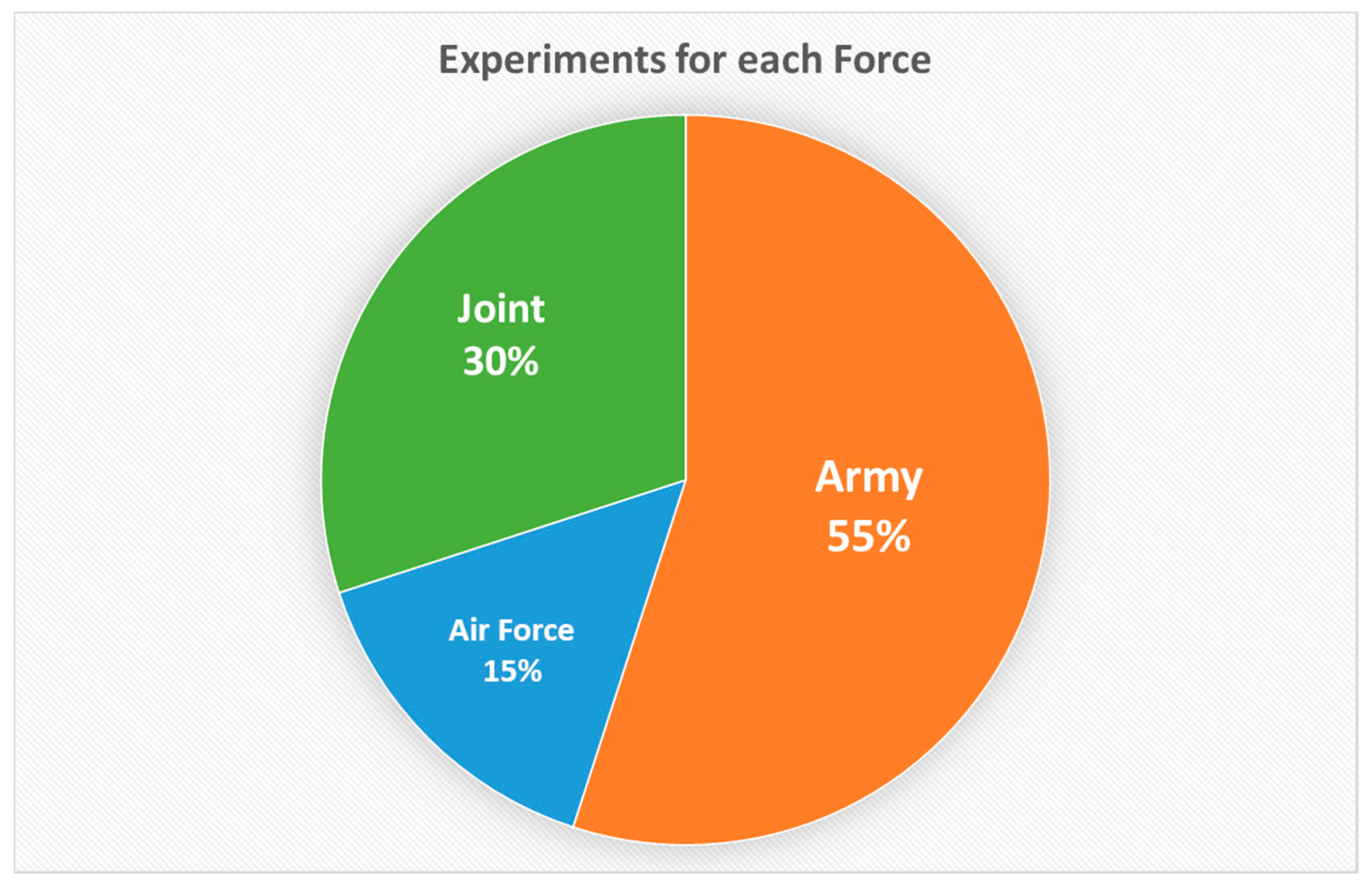
4.1. Major MRM Implementations
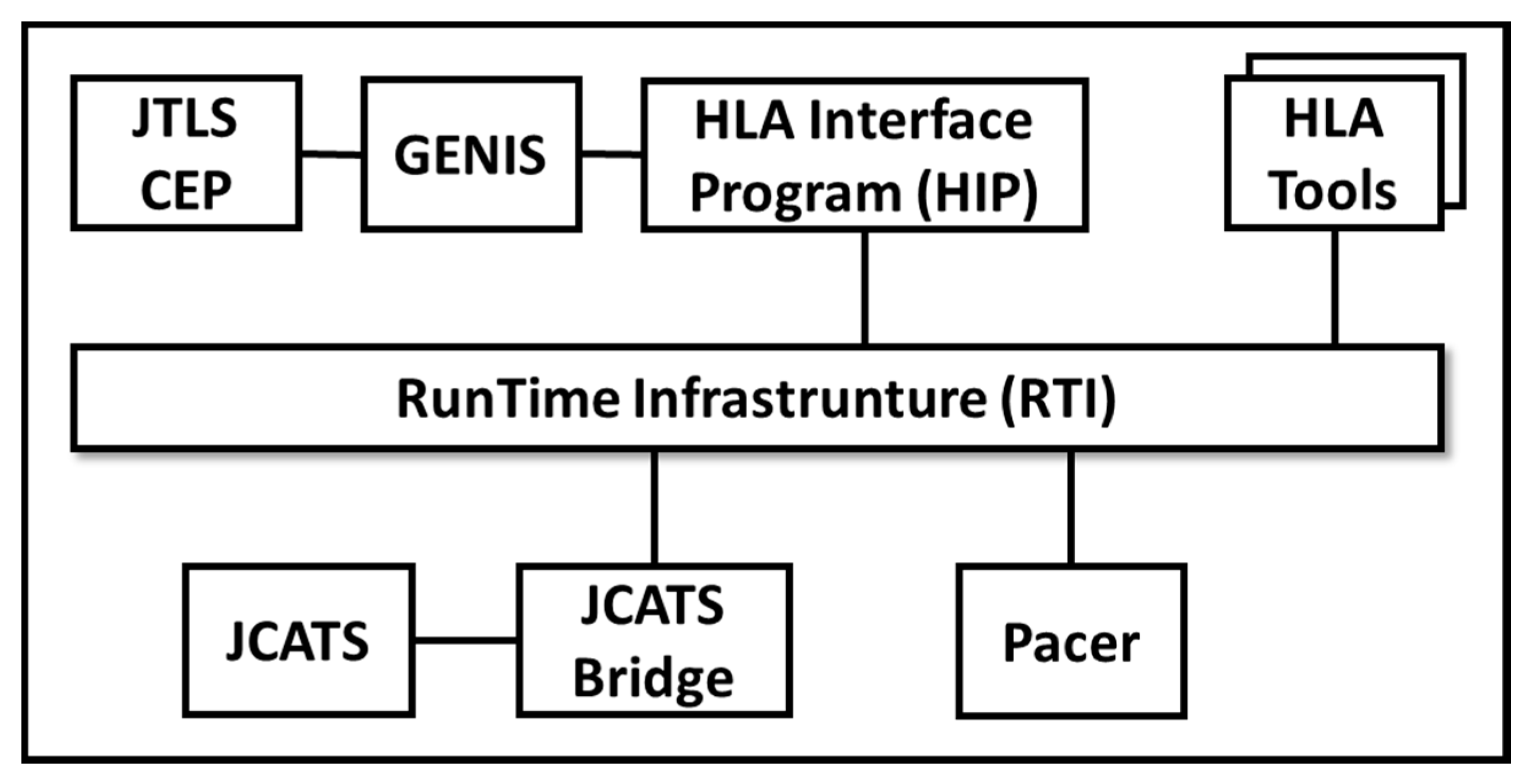
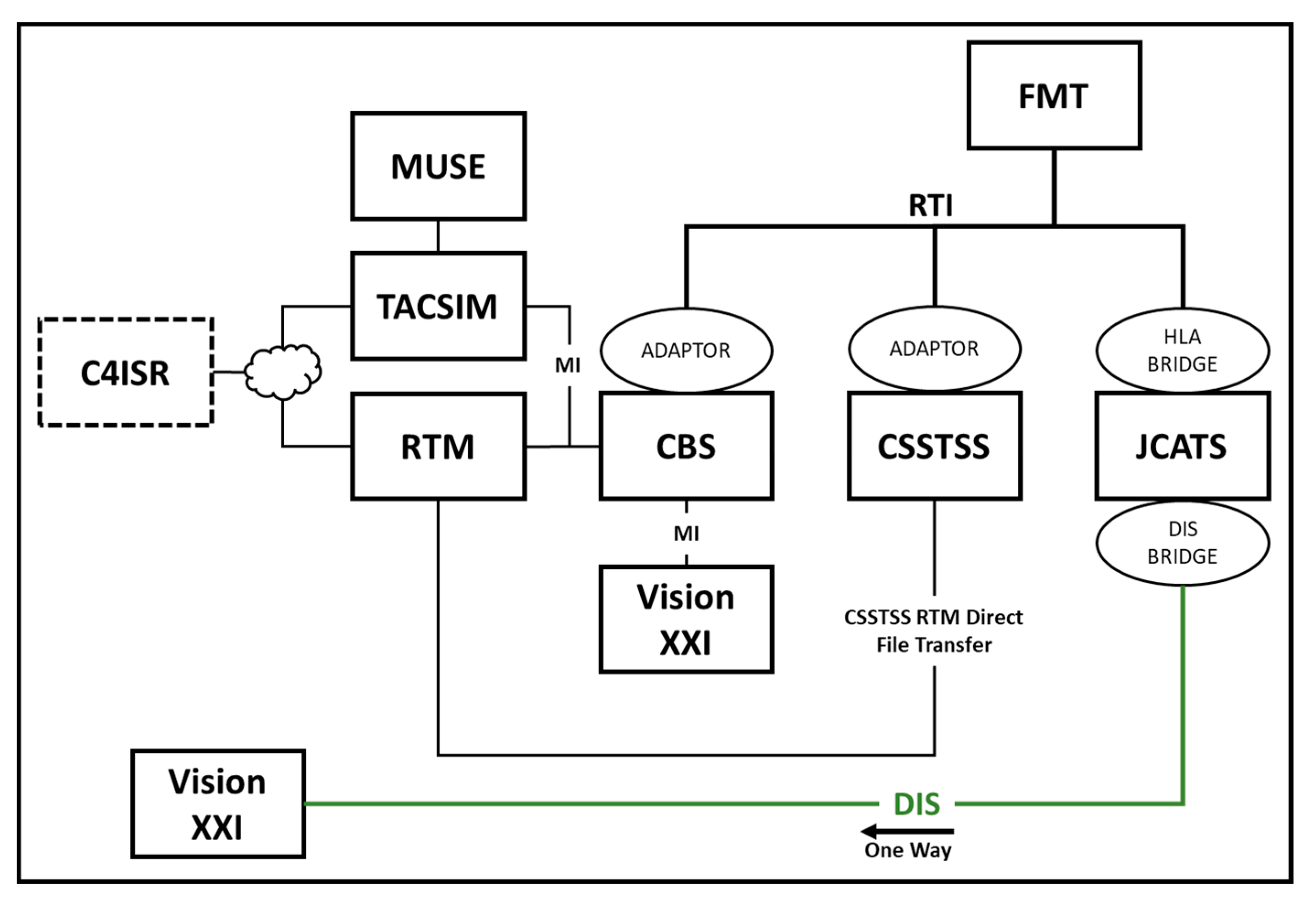
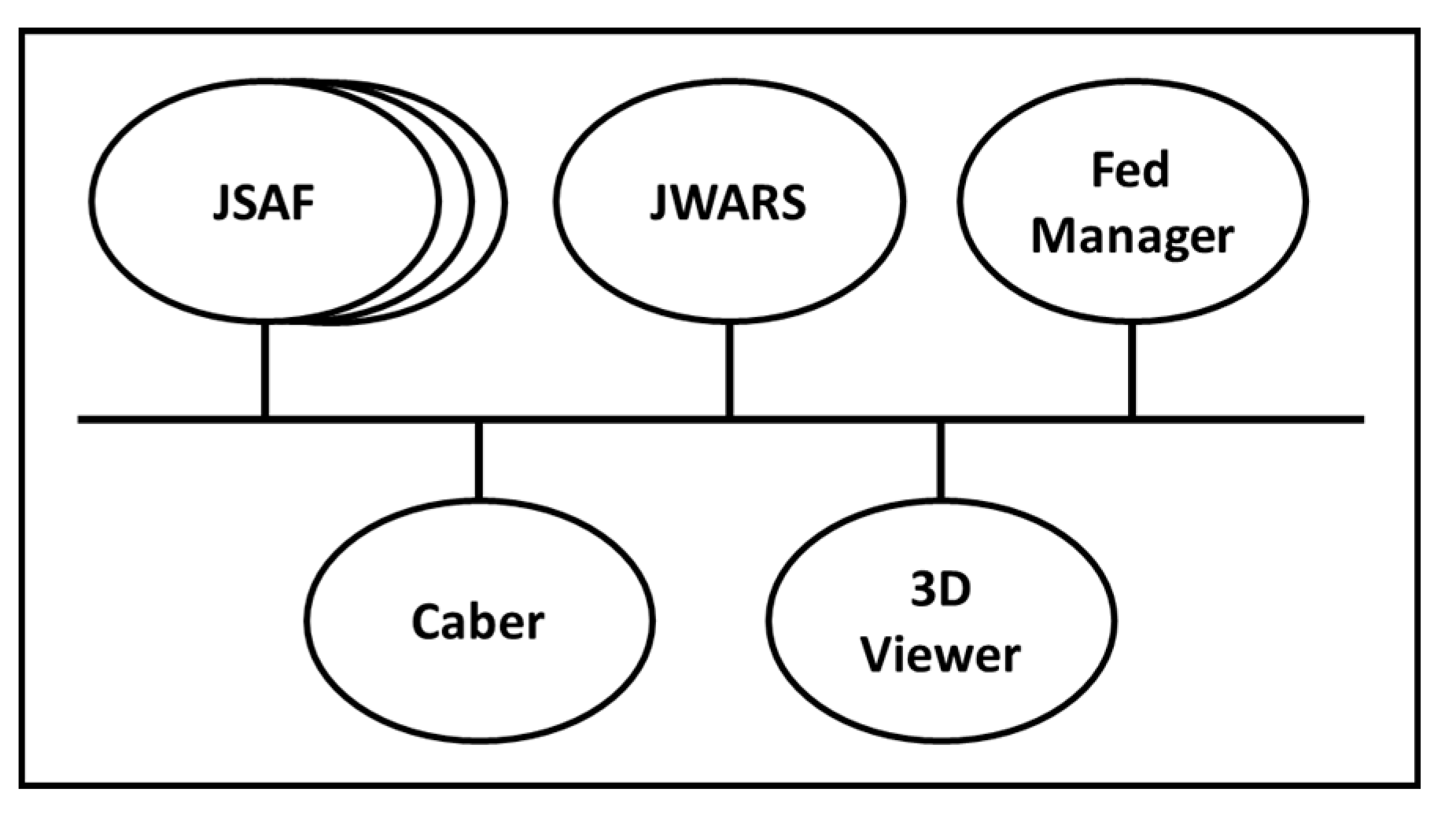
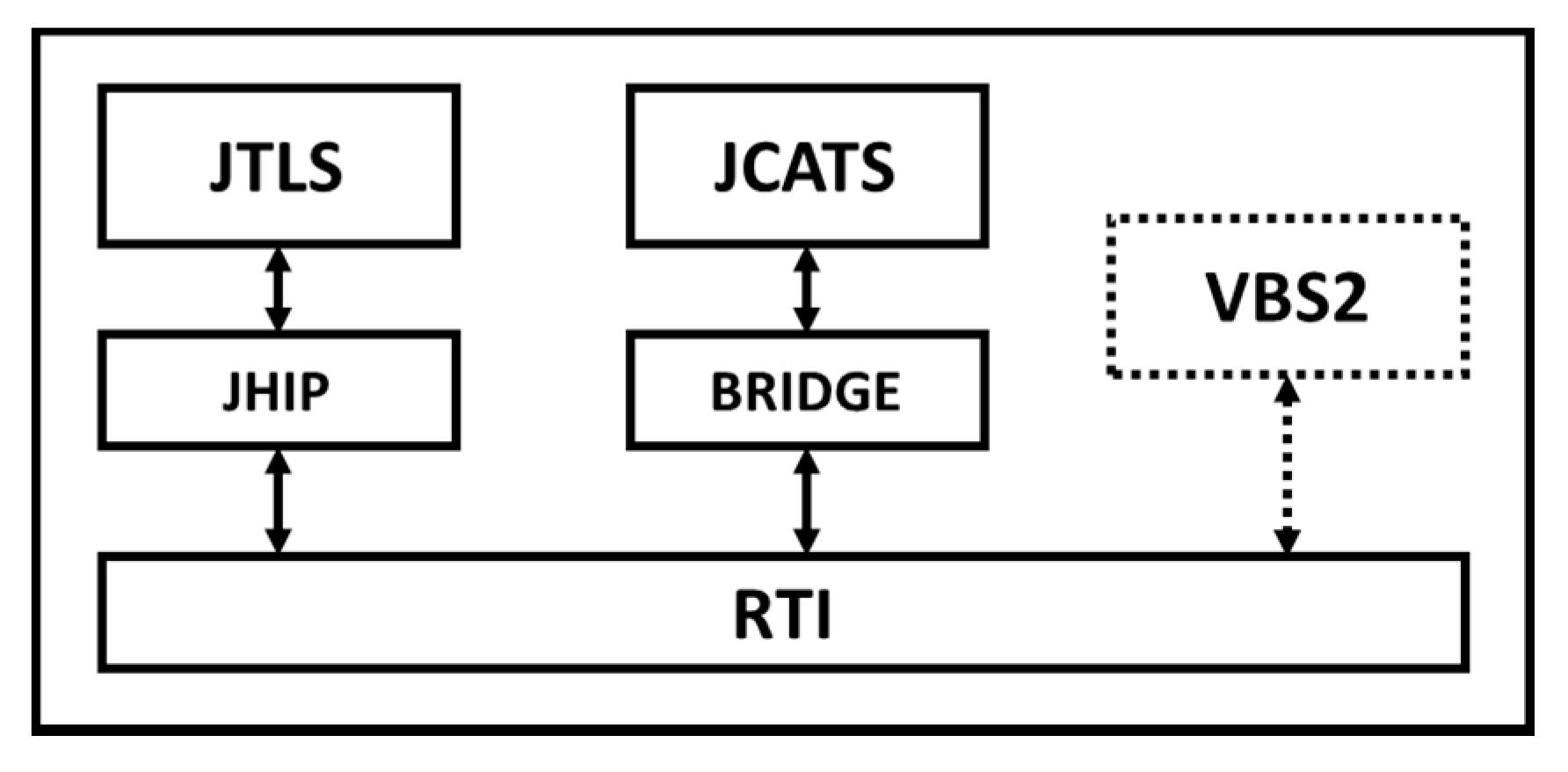
4.2. Interoperation Structures of Major MRM Experiments
5. Discussion
5.1. V-C Interoperation
5.2. Different Resolution Standard
5.3. MRM Implementation Issues
5.3.1. Disaggregation Overload
5.3.2. Time Synchronization
5.3.3. Results Correlation
5.3.4. Data Inconsistency
5.4. The Comparison of Civilian and Military
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Hong, S.Y.; Kim, T.G. A resolution converter for multi-resolution modeling/simulation on HLA/RTI. In Systems Modeling and Simulation; Springer: Tokyo, Japan, 2007; pp. 289–293. [Google Scholar]
- Davis, P.K.; Tolk, A. Observations on New Developments in Composability and Multi-Resolution Modeling. In Proceedings of the IEEE Winter Simulation Conference, Washington, DC, USA, 9–12 December 2007; pp. 859–870. [Google Scholar]
- Kim, J.; Lee, K.; Marin, M.; Lee, G.; Rabelo, L. Development of the Multi-Resolution Modeling Environment through Aircraft Scenarios. In Proceedings of the SAE Aerospace Systems and Technologies Conference, London, UK, 6–8 November 2018. [Google Scholar]
- Davis, P.K.; Bigelow, J.H. Experiments in Multiresolution Modeling (MRM); Rand Corporation: Santa Monica, CA, USA, 1998. [Google Scholar]
- Hong, S.Y.; Kim, T.G. Specification of multi-resolution modeling space for multi-resolution system simulation. Simulation 2013, 89, 28–40. [Google Scholar] [CrossRef]
- Liu, B.; Huang, K. The Concept and Some Design Issues about Multi-Resolution Modeling in HLA; ICSC: Shanghai, China, 2002. [Google Scholar]
- Liu, B.; Huang, K. Multi-resolution modeling: Present status and trends. J. Syst. Simul. 2004, 16, 1150–1154. [Google Scholar]
- Santucci, J.F.; Capocchi, L.; Zeigler, B.P. System entity structure extension to integrate abstraction hierarchies and time granularity into DEVS modeling and simulation. Simulation 2016, 92, 747–769. [Google Scholar] [CrossRef]
- Jie, F.; Li, F.; Lu, Z.; Geng, B. Study of CGF Task Simulation System Based on HLA. In Proceedings of the International Computer Science Conference, Shanghai, China, 27–30 October 2012; pp. 361–369. [Google Scholar]
- Rabelo, L.; Kim, K.; Park, T.W.; Pastrana, J.; Marin, M.; Lee, G.; Nagadi, K.; Ibrahim, B.; Gutierrez, E. Multi resolution modeling. In Proceedings of the IEEE Winter Simulation Conference, Huntington Beach, CA, USA, 6–9 December 2015; pp. 2523–2534. [Google Scholar]
- Yang, B.; Ren, B.; Wu, Y. The research of multi-resolution modeling and simulation of the emergency evacuation. Proc. Eng. 2012, 29, 3110–3116. [Google Scholar] [CrossRef]
- Gorecki, S.; Possik, J.; Zacharewicz, G.; Ducq, Y.; Perry, N. A multicomponent distributed framework for smart production system modeling and simulation. Sustainability 2020, 12, 6969. [Google Scholar] [CrossRef]
- Li, H.; Li, K.; Yuan, L.; Liu, Y. Research on Multi-Resolution Modeling of Intercity Railway Train Control System. In Proceedings of the International Conference on Intelligent Rail Transportation (ICIRT), Marina Bay Sands, Singapore, 12–14 December 2018; pp. 1–5. [Google Scholar]
- Davis, P.K. An Introduction to Variable-Resolution Modeling and Cross-Resolution Model Connection; Rand Corporation: Santa Monica, CA, USA, 1993. [Google Scholar]
- Reynolds, P.F.; Natrajan, A.; Srinivasan, S. Consistency maintenance in multiresolution simulation. ACM Trans. Model. Comput. Simul. (TOMACS) 1997, 7, 368–392. [Google Scholar] [CrossRef]
- Davis, P.K. An introduction to variable-resolution modeling. Naval Res. Logist. (NRL) 1995, 42, 151–181. [Google Scholar] [CrossRef]
- Page, E.H.; Smith, R. Introduction to military training simulation: A guide for discrete event simulationists. In Proceedings of the IEEE Winter Simulation Conference, Washington, DC, USA, 13–16 December 1998; pp. 53–60. [Google Scholar]
- Tolk, A. Engineering Principles of Combat Modeling and Distributed Simulation; Wiley Online Library: Hoboken, NJ, USA, 2012; p. 61. [Google Scholar]
- Park, T.W.; Kim, K.; Rabelo, L.; Lee, G. An Agile Roadmap for Live, Virtual and Constructive-integrating Training Architecture (LVC-ITA): A Case Study Using a Component Based Integrated Simulation Engine. Ph.D. Thesis, University of Central Florida, Orlando, FL, USA, 2015. [Google Scholar]
- Loper, M.L. Modeling and Simulation in the Systems Engineering Life Cycle: Core Concepts and Accompanying Lectures; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- MSCO. Modeling and Simulation (M&S) Glossary; Modeling and Simulation Coordination Office: Alexandria, VA, USA, 2011. [Google Scholar]
- Oh, J.; Jang, Y.C.; Kim, C.Y.; Jee, C.K.; Hong, Y.S. V&V of integrated interoperability system for LVC simulation on aircraft weapon system. J. Korea Inst. Mil. Sci. Technol. 2015, 18, 326–334. [Google Scholar]
- Tan, G.; Ng, W.N.; Moradi, F. Aggregation/Disaggregation in HLA Multi-Resolution Distributed Simulation. In Proceedings of the 5th IEEE International Workshop on Distributed Simulation and Real-Time Applications, Cincinnati, OH, USA, 13–15 August 2001; p. 76. [Google Scholar]
- Lee, G.; Kim, J.; Marin, M.; Lee, K.; Gutierrez, E.; Rabelo, L. Building Multiple Resolution Modeling Systems Using the High-Level Architecture. SAE Int. J. Adv. Curr. Pract. Mobil. 2019, 2, 838–842. [Google Scholar] [CrossRef]
- Steinman, J.S.; Hardy, D.R. Evolution of the Standard Simulation Architecture; Ram Labs Inc.: San Diego, CA, USA, 2004. [Google Scholar]
- Dahmann, J.S.; Fujimoto, R.M.; Weatherly, R.M. The Department of Defense High Level Architecture. In Proceedings of the IEEE 29th Conference on Winter Simulation, Atlanta, GA, USA, 7–10 December 1997; pp. 142–149. [Google Scholar]
- IEEE. IEEE Standard for Modeling and Simulation (M&S) High Level Architecture (HLA)-Framework and Rules; IEEE Std 1516-2010 (Revision of IEEE Std 1516–2000); IEEE: Piscataway, NJ, USA, 2010; pp. 1–38. [Google Scholar] [CrossRef]
- Wilson, A.L.; Weatherly, R.M. The aggregate level simulation protocol: An evolving system. In Proceedings of the 26th Conference of Winter Simulation, Orlando, FL, USA, 11–14 December 1994; pp. 781–787. [Google Scholar]
- Hofer, R.C.; Loper, M.L. DIS today [Distributed interactive simulation]. Proc. IEEE 1995, 83, 1124–1137. [Google Scholar] [CrossRef]
- Powell, E.T.; Noseworthy, J.R.; Tolk, A. The test and training enabling architecture (TENA). In Engineering Principles of Combat Modeling and Distributed Simulation; Wiley Online Library: Hoboken, NJ, USA, 2012; p. 449. [Google Scholar]
- Kuhl, F.; Weatherly, R.; Dahmann, J. Creating Computer Simulation Systems: An Introduction to the High Level Architecture; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; Group, P. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. PLoS Med. 2009, 6, e1000097. [Google Scholar] [CrossRef] [PubMed]
- Karr, C.; Franceschini, R.; Perumalla, K.; Petty, M. Integrating battlefield simulations of different granularity. In Proceedings of the Southeastern Simulation Conference, Pensacola, FL, USA, 22–23 October 1992; pp. 48–55. [Google Scholar]
- Karr, C.R.; Franceschini, R.W.; Perumalla, K.R.S.; Petty, M.D. Integrating Aggregate and Vehicle Level Simulations. In Proceedings of the Third Conference on Computer Generated Forces and Behavioral Representation, Institute for Simulation and Training, Orlando, FL, USA, 17–19 March 1993; pp. 231–240. [Google Scholar]
- Powell, D.R.; Hutchinson, J.L. Eagle II: A Prototype for Multi-Resolution Combat Modeling; Los Alamos National Lab.: Los Alamos, NM, USA, 1993. [Google Scholar]
- Hardy, D.; Healy, M. Constructive and virtual interoperation: A technical challenge. Simul. Ser. 1994, 26, 37. [Google Scholar]
- Babcock, D.; Molnar, J.; Selix, G.; Conrad, G.; Castle, M.; Dunbar, J.; Gendreau, S.; Irvin, T.; Uzelac, M.; Matone, J. Constructive to Virtual Simulation Interconnection for the Sofnet-JCM Interface Project. In Proceedings of the 16th Interservice/Industry Training Systems and Education Conference; National Training and Simulation Association, Orlando, FL, USA, 28 November–1 December 1994. [Google Scholar]
- Calder, R.B.; Peacock, J.C.; Panagos, J.; Johnson, T.E. Integration of Constructive, Virtual, Live, and Engineering Simulations in the JPSD CLCGF. In Proceedings of the 5th Conference on Computer Generated Forces & Behavioral Representation; Institute for Simulation Training, Orlando, FL, USA, 9–11 May 1995. [Google Scholar]
- Calder, R.B.; Peacock, J.C.; Wise, B.P., Jr.; Stanzione, T.; Chamberlain, F.; Panagos, J. Implementation of a Dynamic Aggregation/Deaggregation Process in the JPSD CLCGF. In Proceedings of the 5th Conference on Computer Generated Forces & Behavioral Representation; Institute for Simulation Training, Orlando, FL, USA, 9–11 May 1995. [Google Scholar]
- Weeden, N.; Smith, M. Aggregation Disaggregation research-A UK Approach Update. In Proceedings of the 15th DIS Workshop, Orlando, FL, USA, 16–20 September 1996; pp. 305–314. [Google Scholar]
- Schricker, S.A.; Franceschini, R.W.; Stober, D.R.; Nida, J.D. An Architecture for Linking Aggregate and Virtual Simulations. In Proceedings of the Sixth Conference on Computer Generated Forces & Behavioral Representation, Institute for Simulation Training, Orlando, FL, USA, 23–25 July 1996; pp. 427–434. [Google Scholar]
- Schricker, S.A.; Franceschini, R.W.; Adkins, M.K. Using Pseudo-Disaggregation to Populate a Large Battlefield for Sensor Systems. In Proceedings of the 7th Conference on Computer Generated Forces & Behavioral Representation, Orlando, FL, USA, 12–14 May 1998; pp. 475–484. [Google Scholar]
- Seiger, T.; Holm, G.; Bergsten, U. Aggregation/Disaggregation Modeling in HLA-Based Multi Resolution Simulations. In Proceedings of the Fall Simulation Interoperability Workshop (SISO), Orlando, FL, USA, 17–22 September 2000; pp. 17–22. [Google Scholar]
- Beeker, E.R. Battlespace Federation: An HLA Experiment in Disaggregation. In Proceedings of the Spring Simulation Interoperability Workshop (SISO), Orlando, FL, USA, 26–31 March 2000; pp. 21–31. [Google Scholar]
- Bowers, A.; Prochnow, D.L. Multi-resolution modeling in the JTLS-JCATS Federation. In Proceedings of the Fall Simulation Interoperability Workshop (SISO), Orlando, FL, USA, 14–19 September 2003. [Google Scholar]
- Zabek, A.; Henry, H.; Prochnow, D.; Wright, M. The Army Constructive Training Federation–Multi-Resolution Modeling: The Next Generation of Land Component Commander Training at the Unit of Employment Echelon of Command. In Proceedings of the Fall Simulation Interoperability Workshop, (SISO), Orlando, FL, USA, 19–24 September 2004; pp. 19–24. [Google Scholar]
- Macannuco, D.; Snow, C.; Painter, R.D.; Jones, J.W. Multi-Level Resolution Engagement Modeling through a JWARS-JSAF HLA Federation. In Proceedings of the Spring Simulation Interoperability Workshop, (SISO), San Diego, CA, USA, 3–8 April 2005; pp. 607–640. [Google Scholar]
- Cayirci, E. Multi-Resolution Federations in Support of Operational and Higher Level Combined/Joint Computer Assisted Exercises. In Proceedings of the IEEE Winter Simulation Conference, Austin, TX, USA, 13–16 December 2009; pp. 1787–1797. [Google Scholar]
- Raue, E.; Gallois, V. A Dynamic Multi-Resolution Model Based on HLA Interconnection of Commercial-Off-The-Shelf (COTS) Simulation Tools. In Proceedings of the NATO Modeling and Simulation Group (NMSG) Symposium, Bern, Switzerland, 13–14 October 2011. [Google Scholar]
- Kim, K.; Park, T.; Pastrana, J.; Marin, M.; Cortes, E.A.; Rabelo, L.C.; Lee, G. Modeling of Complex Scenarios Using LVC Simulation. In Proceedings of the IEEE Winter Simulation Conference, Savannah, GA, USA, 7–10 December 2014; pp. 2931–2941. [Google Scholar]
- Kim, Y.H.; Song, Y.S.; Kim, C.O. A Study on the interoperability of ROK Air Force virtual and constructive simulation. J. Korea Soc. Simul. 2019, 28, 169–177. [Google Scholar]
- Goldiez, B.F. History of networked simulations. In The Distributed Interactive Simulation Systems for Simulation and Training in the Aerospace Environment: A Critical Review, Proceedings of the Symposium on OE/Aerospace Sensing And Dual Use Photonics, Orlando, FL, USA, 17–21 April 1995; International Society for Optics and Photonics: Bellingham, WA, USA, 1995; p. 1028005. [Google Scholar]
- Williams, T.M.; Sale, N.; Smith, M.; Shakoor, A.S. Automated Variable Representation. In Proceedings of the Simulation Interoperability Workshop (SISO), Orlando, FL, USA, 14–18 September 1998. [Google Scholar]
- Trinker, A. General Architecture for Interfacing Virtual and Constructive Simulations in DIS Environment. Internal Document; Institute for Simulation and Training: Orlando, FL, USA, 1994. [Google Scholar]
- Petty, M.; Franceschini, R. Disaggregation overload and spreading disaggregation in constructive+ virtual linkages. In Proceedings of the 5th Conference on Computer Generated Forces & Behavioral Representation; Institute for Simulation Training, Orlando, FL, USA, 9–11 May 1995; pp. 103–114. [Google Scholar]
- Petty, M.D.; Franceschini, R.W.; Panagos, J. Multi-resolution combat modeling. In Engineering Principles of Combat Modeling and Distributed Simulation; Wiley Online Library: Hoboken, NJ, USA, 2012; pp. 607–640. [Google Scholar]
- Franceschini, R.W. Correlation Error in Multiple Resolution Entity Simulations. Ph.D. Thesis, University of Central Florida, Orlando, FL, USA, 1999. [Google Scholar]
- Powell, D.R. Control of Entity Interactions in a Hierarchical Variable Resolution Simulation; Los Alamos National Lab.: Los Alamos, NM, USA, 1997. [Google Scholar]
- Franceschini, R.W.; Wu, A.; Mukherjee, A. Computational Strategies for Disaggregation. In Proceedings of the 9th Conference on Computer Generated Forces & Behavioral Representation, Institute for Simulation Training, Orlando, FL, USA, 16–18 May 2000. [Google Scholar]
- Adelantado, M.; Siron, P. Multiresolution Modeling and Simulation of An Air-Ground Combat Application. In Proceedings of the Spring Simulation Interoperability Workshop (SISO), Orlando, FL, USA, 25–30 March 2001. [Google Scholar]
- Bigelow, J.H.; Davis, P.K. Implications for Model Validation of Multiresolution, Multiperspective Modeling (mrmpm) and Exploratory Analysis; Rand Corporation: Santa Monica, CA, USA, 2003. [Google Scholar]
- Yilmaz, L.; Lim, A.; Bowen, S.; Ören, T. Requirements and Design Principles for Multisimulation with Multiresolution, Multistage Multimodels. In Proceedings of the IEEE Winter Simulation Conference, Washington, DC, USA, 9–12 December 2007; pp. 823–832. [Google Scholar]
- Natrajan, A.; Reynolds, P.F., Jr.; Srinivasan, S. MRE: A flexible approach to multi-resolution modeling. ACM SIGSIM Simul. Dig. 1997, 27, 156–163. [Google Scholar] [CrossRef]
- The Bohemia Interactive Simulations. The VBS4. Available online: http://www.bisimulations.com/products/vbs4 (accessed on 27 September 2020).


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| People | Systems | Operation | Simulation |
|---|---|---|---|
| Real | Real | Real | Live |
| Real | Simulated | Simulated | Virtual |
| Simulated | Simulated | Simulated | Constructive |
| Simulated | Real | Simulated | Unmanned |
| SYSTEM (Force) | LRM | HRM | Protocol | Module | System | Reference |
|---|---|---|---|---|---|---|
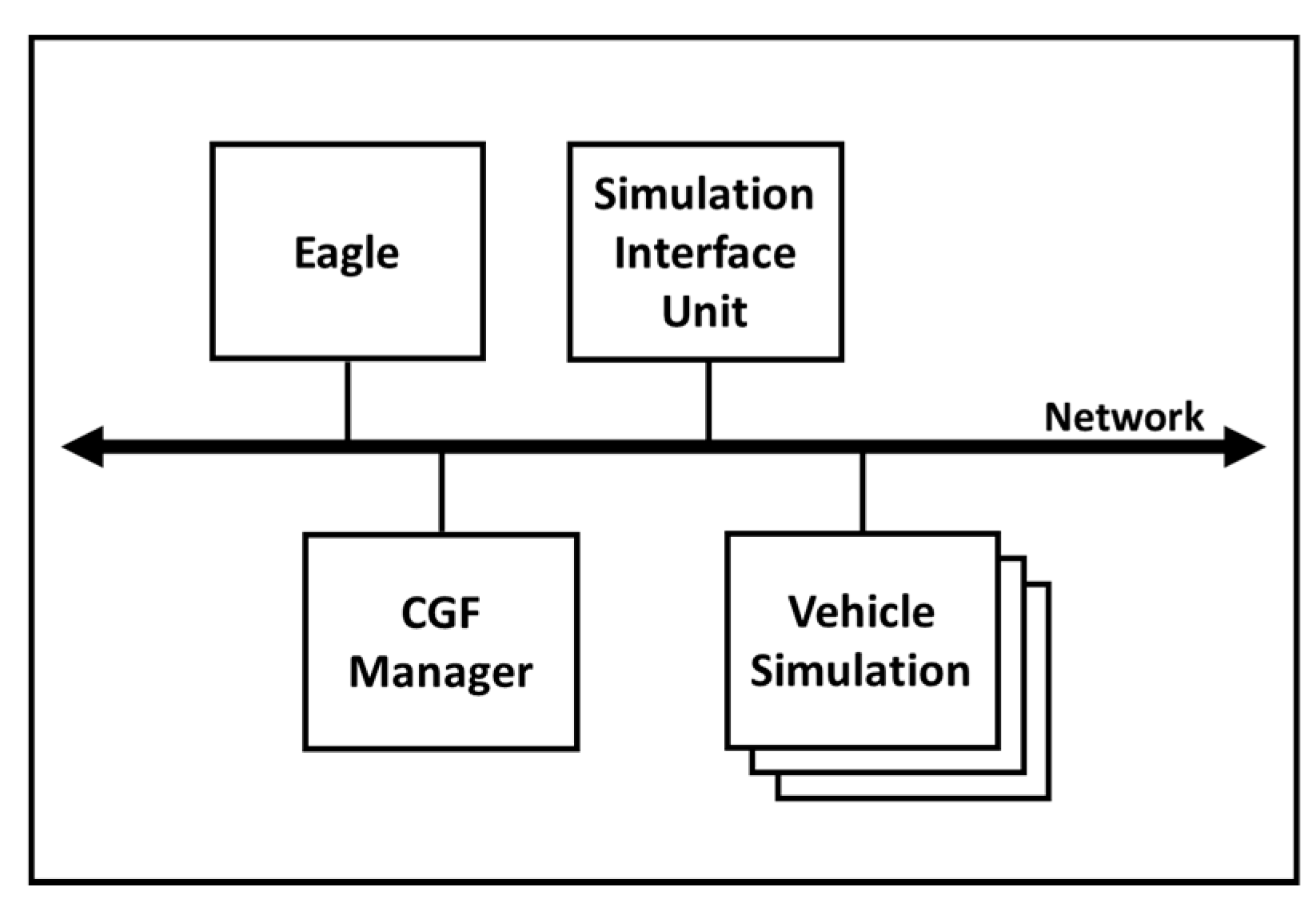
| Eagle/BDS-D (Army) | Eagle | IST CGF Testbed | SIMNET | SIU | CC | [33,34] |
| Eagle II (Army) | Eagle | SIMNET/SAF | DIS | SIU | VC | [35] |
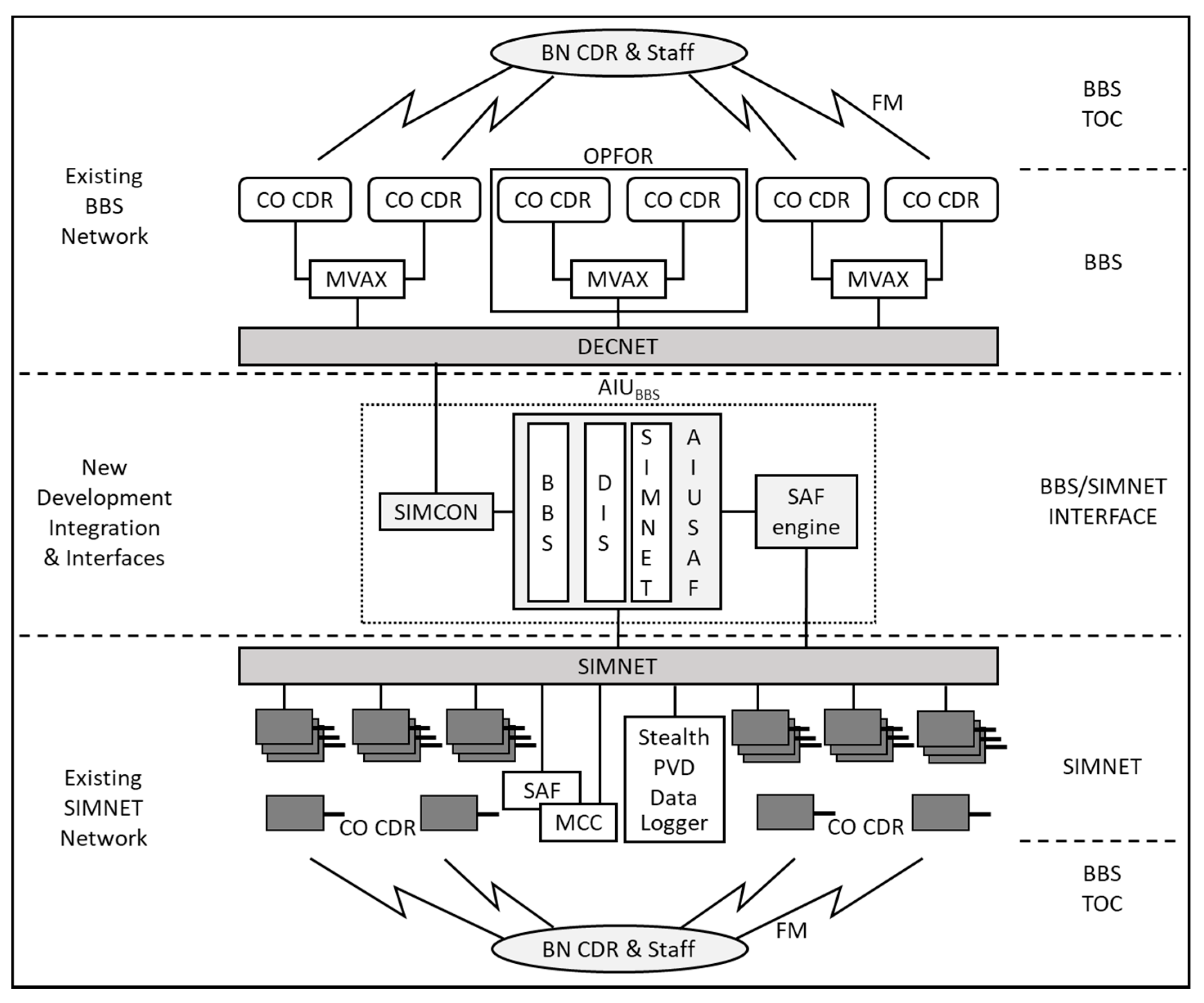
| BBS/SIMNET (Army) | BBS | SIMNET SAF | DIS | AIU | VC | [36] |
| SOFNET-JCM (Air Force) | JCM | SOFNET | DIS | NIU | VC | [37] |
| CLCGF (Army) | Eagle | ModSAF | DIS | SIU | CC | [38,39] |
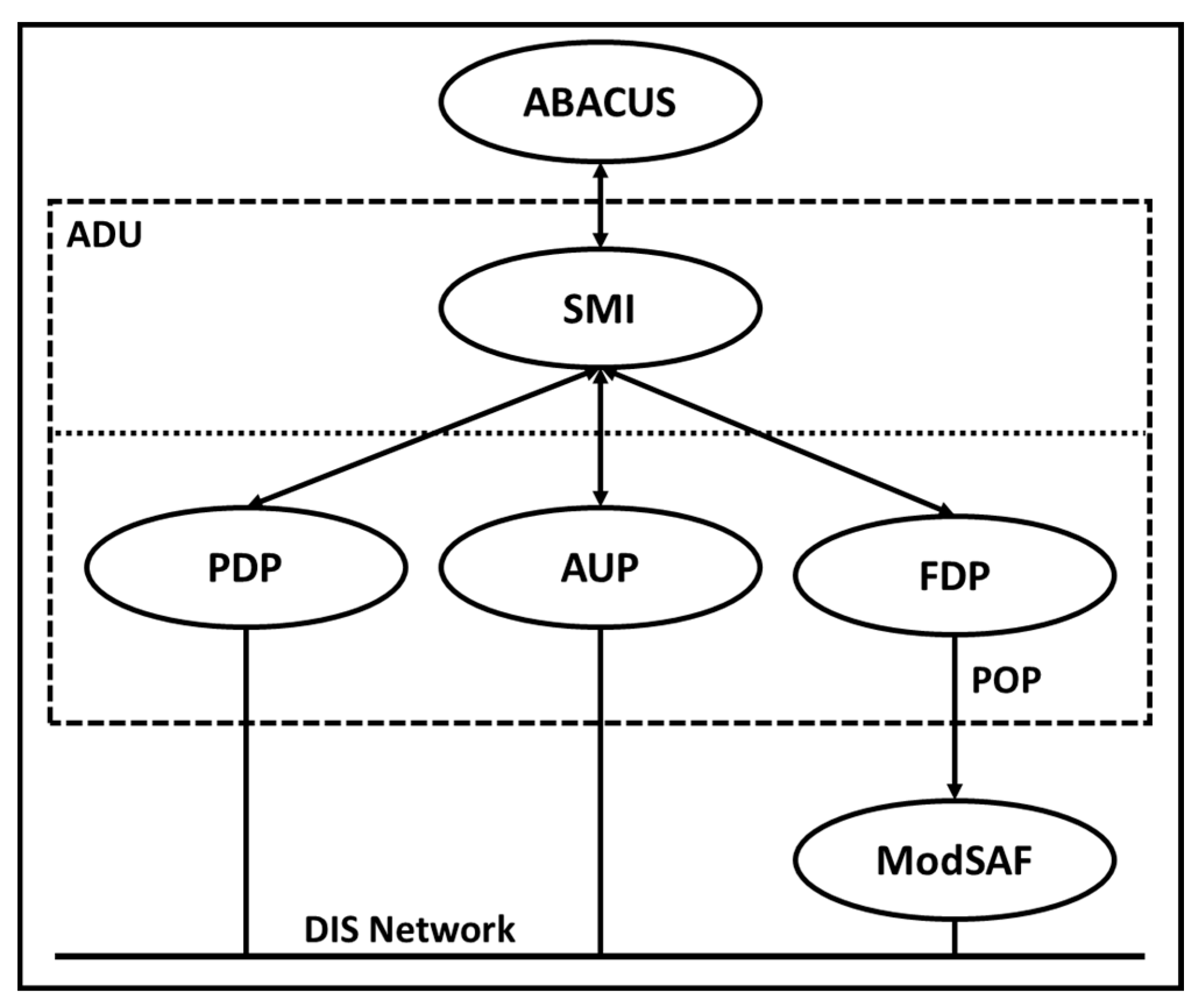
| ABACUS/ModSAF (Army) | ABACUS | ModSAF | DIS | ADU | CC | [40] |
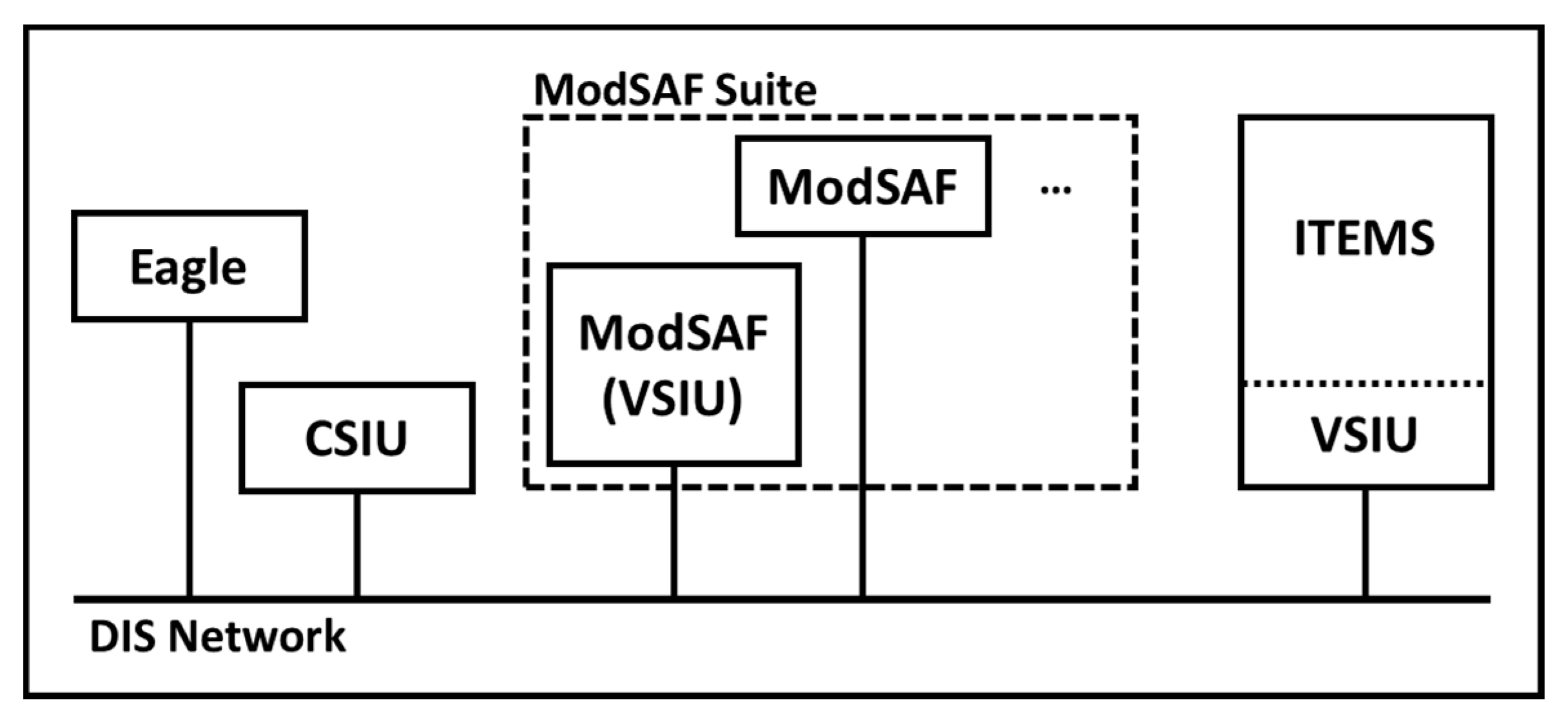
| Eagle/ITEMS (Army) | Eagle | ModSAF ITEMS | DIS | CSIU VSIU | CC | [41] |
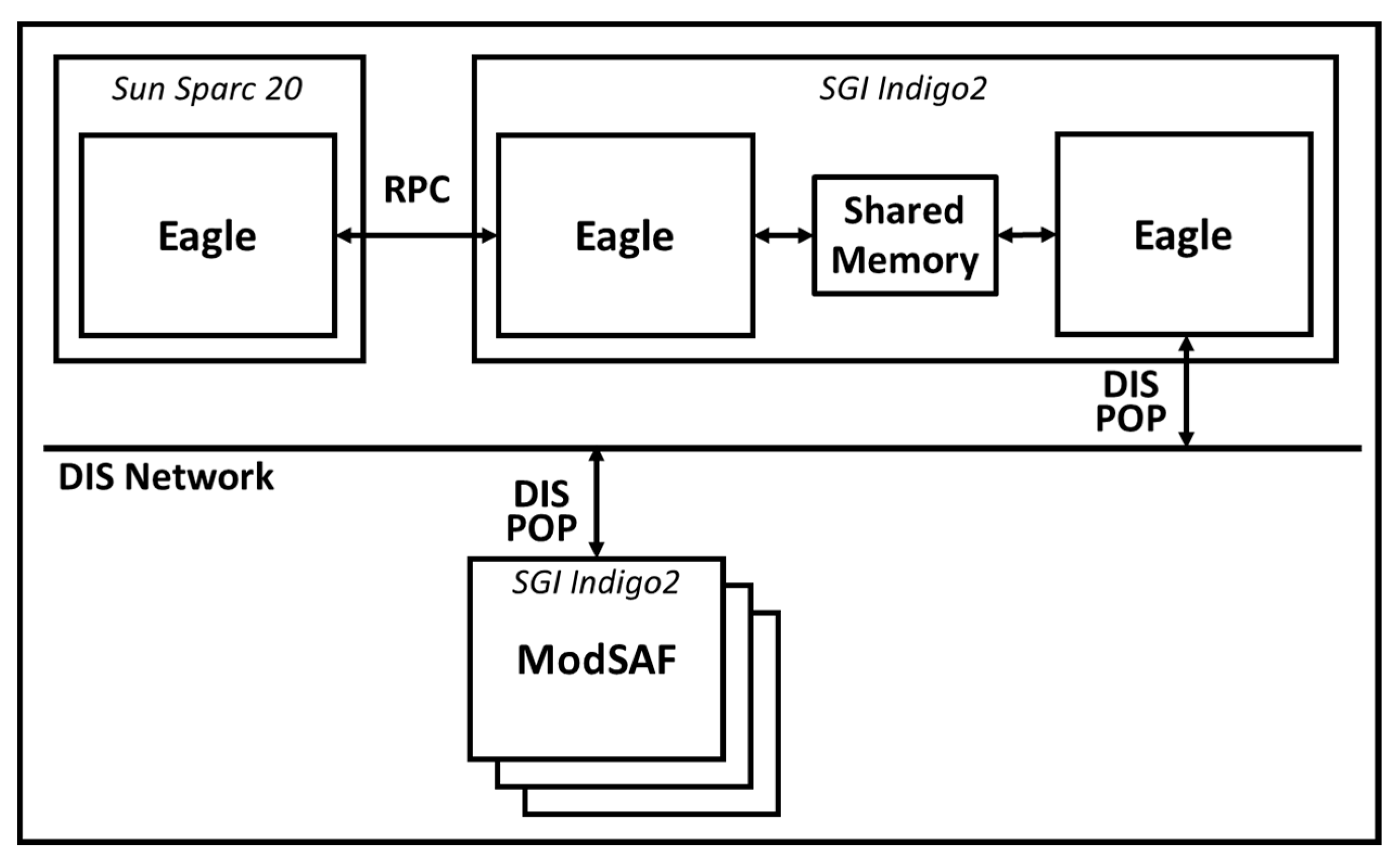
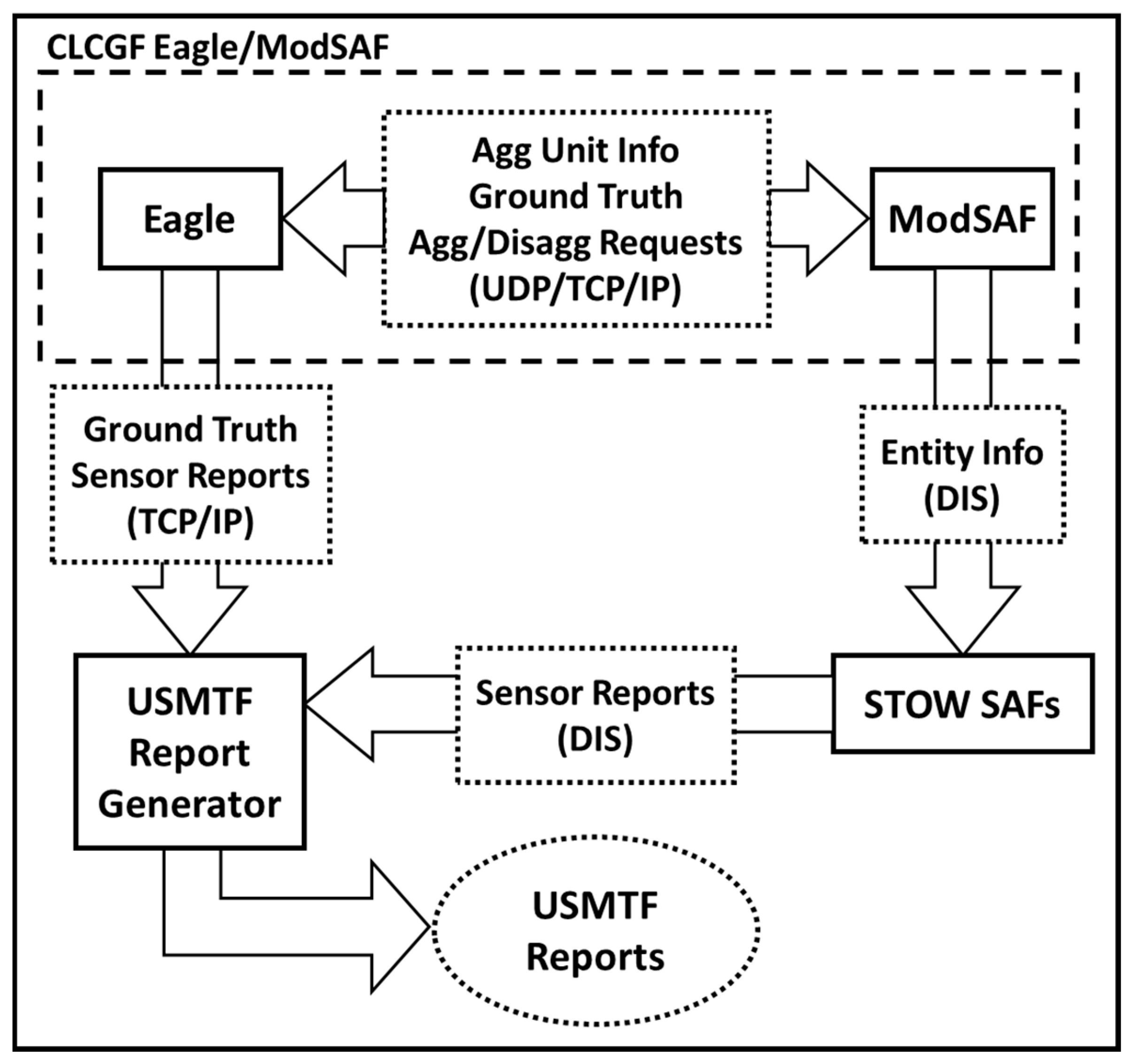
| Eagle/ModSAF (Army) | Eagle | ModSAF STOW | DIS | SIU | CC | [42] |
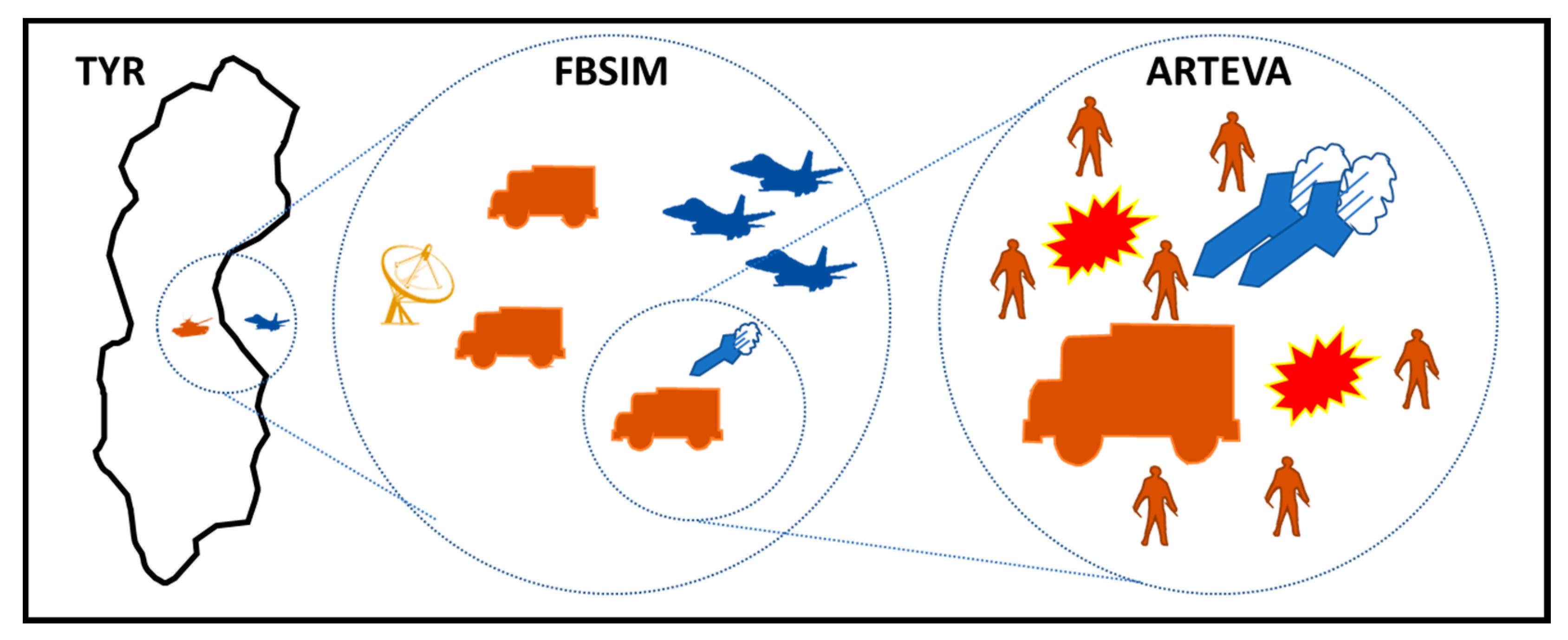
| Swedish Air Defense (Joint) | TYR FBSIM | ARTEVA | HLA | RTI | CC | [43] |
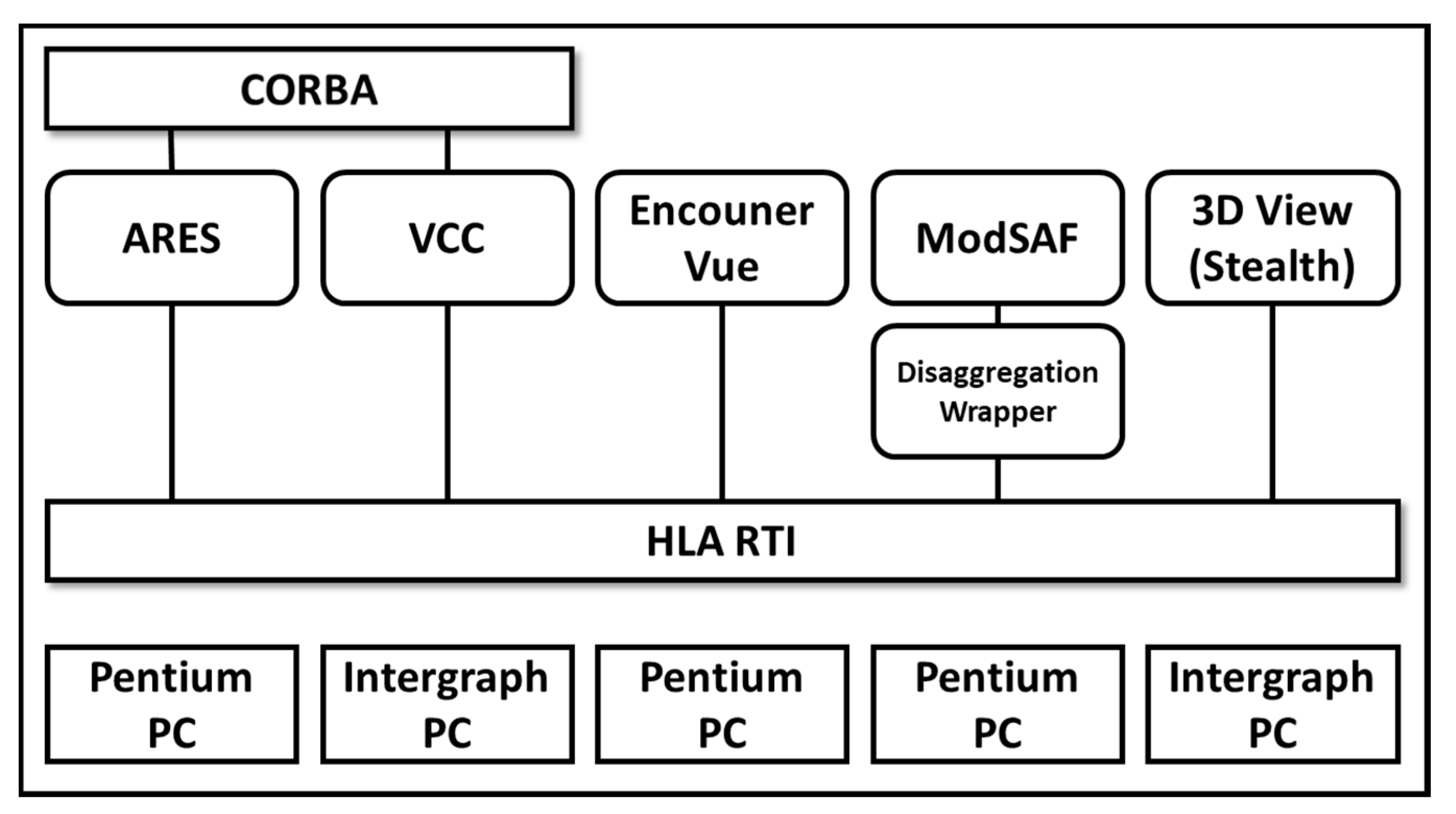
| Battlespace Federation (Army) | ARES | ModSAF | HLA | RTI | CC | [44] |
| JTLS-JCATS (Joint) | JTLS | JCATS | HLA | RTI | VC | [45] |
| ACTF-MRM (Army) | CBS | JCATS | HLA DIS | RTI, CBS MI | VC | [46] |
| JWARS-JSAF (Air Force) | JWARS | JSAF | HLA | RTI | VC | [47] |
| NATO Training Federation (Joint) | JTLS | JCATS | HLA | RTI | VC | [48] |
| COTS simulations (Army) | MASA Sword | VR-Forces | HLA | RTI | CC | [49] |
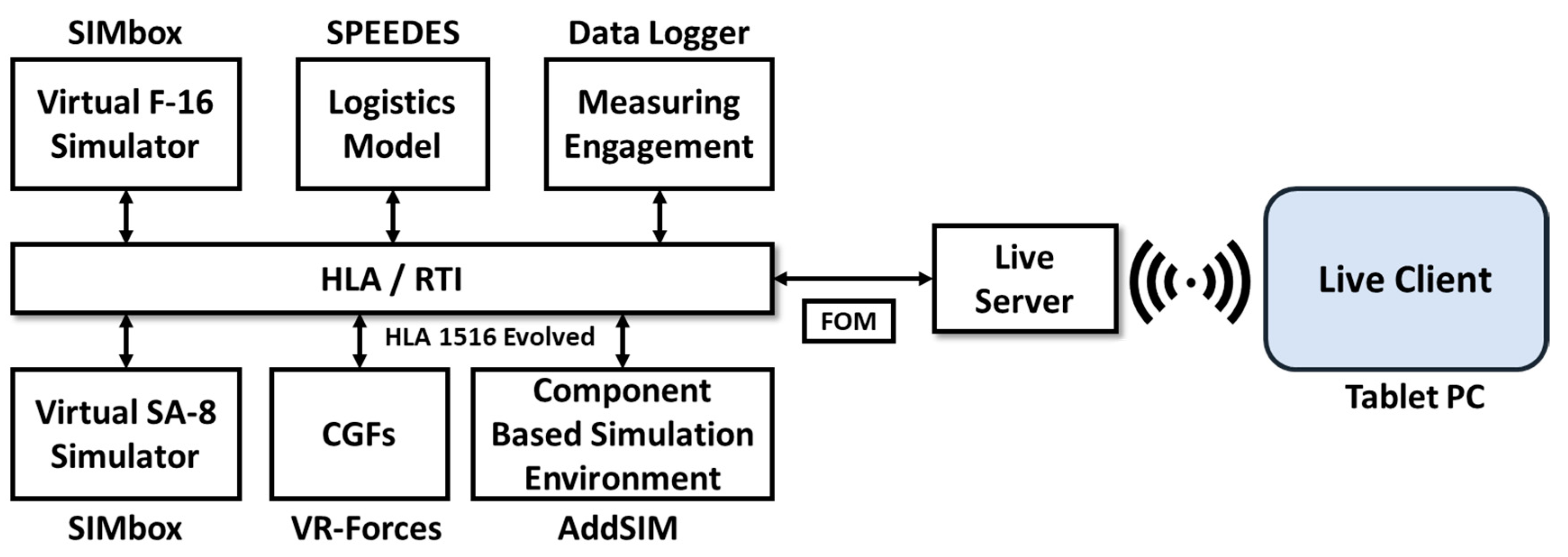
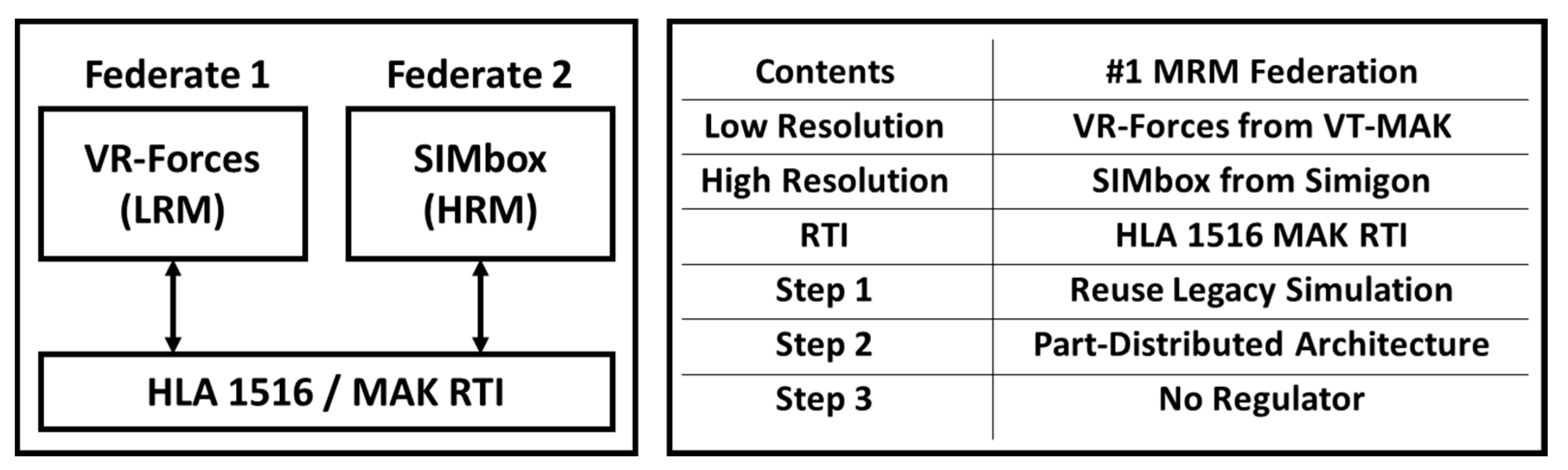
| LVC simulation interoperability (Joint) | VR-Forces | SIMbox | HLA | RTI | VC | [50] |
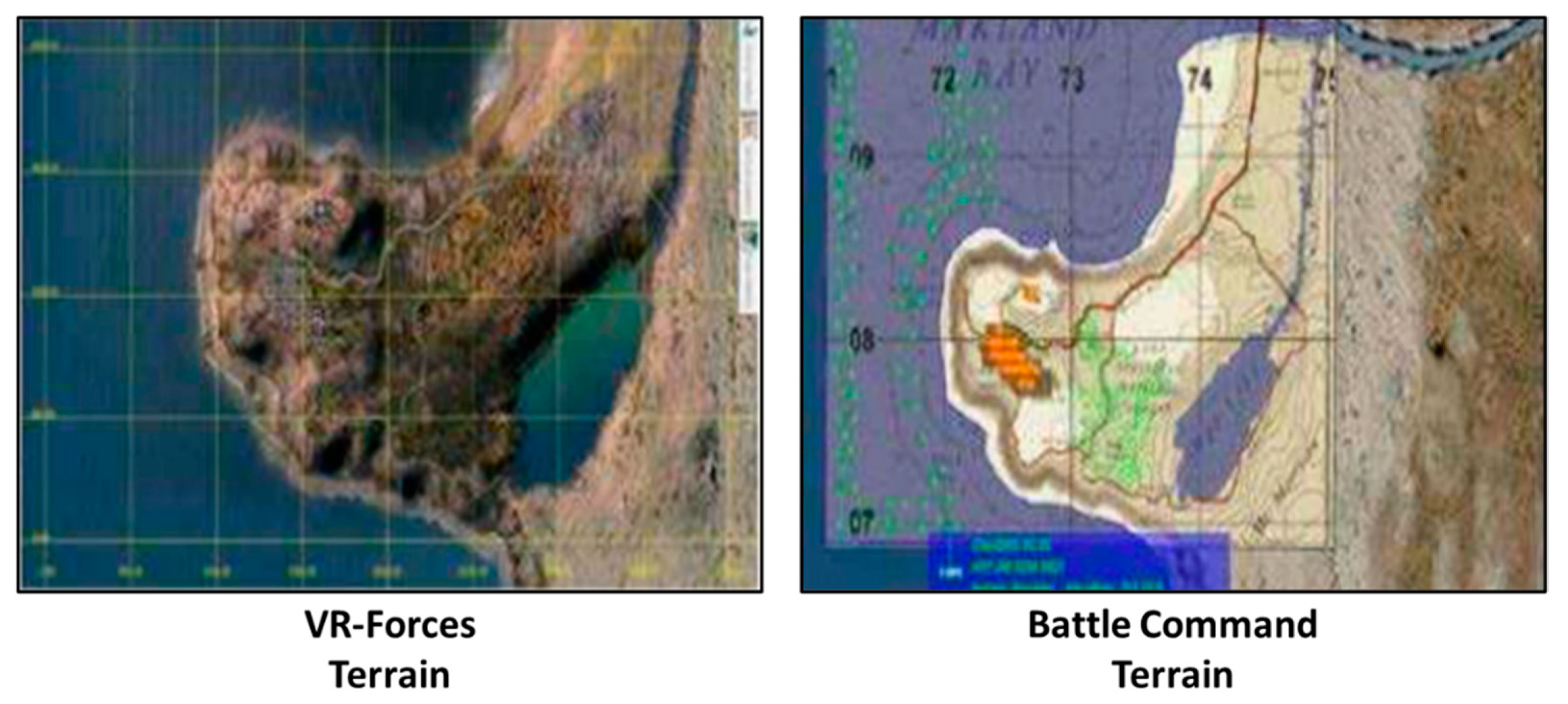
| COTS simulations (Army) | Battle Command | VR-Forces | HLA | RTI | CC | [10] |
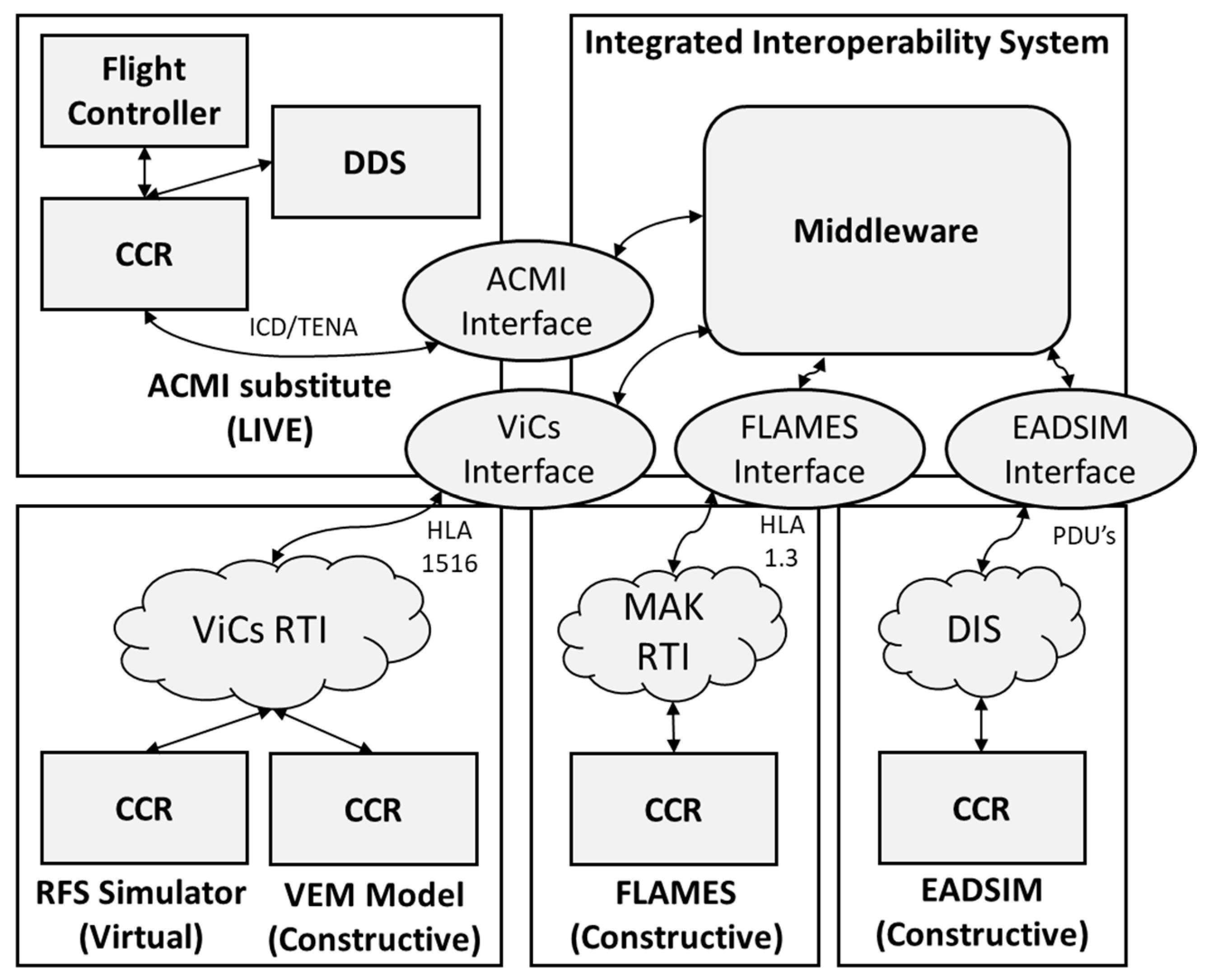
| Integrated system for LVC (Joint) | FLAMES EADSIM | ACMI RFS | HLA DIS TENA | RTI | LVC | [22] |
| COTS simulations (Joint) | VR-Forces | SIMbox | HLA | RTI | VC | [3] |
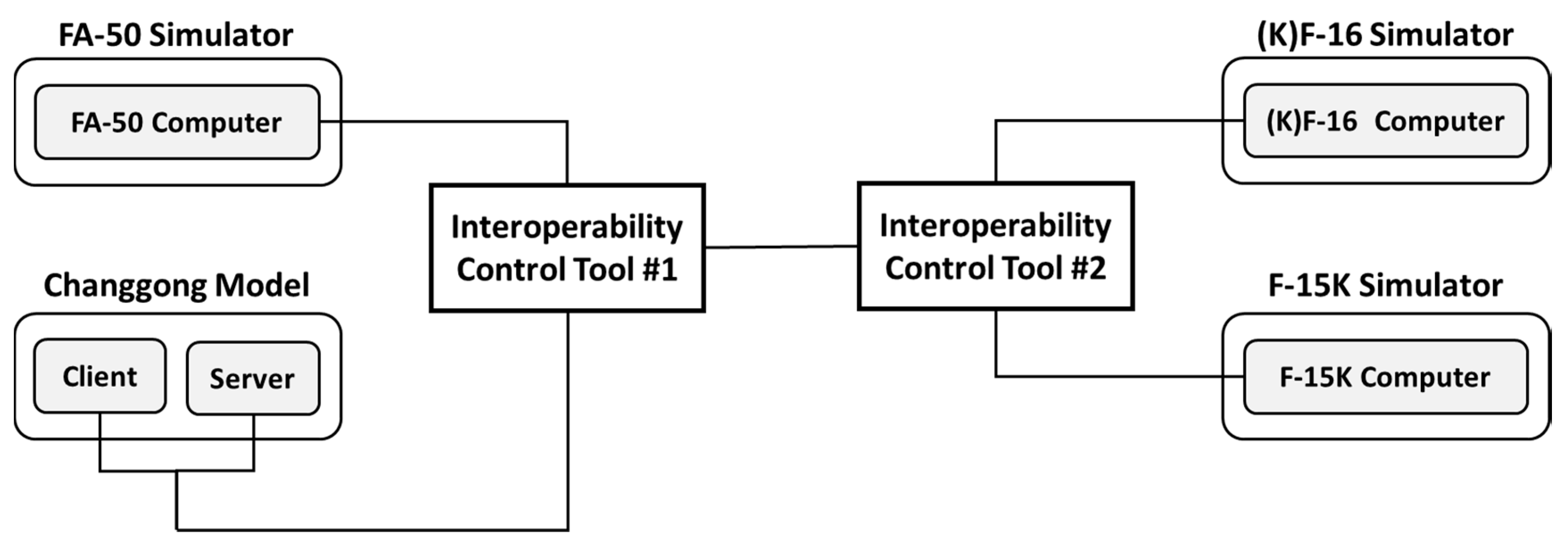
| V-C Federation (Air Force) | Changgong | F-15K, KF-16, FA-50 Simulator | HLA DIS | RTI | VC | [51] |
| Army | Navy | Air Force | |
|---|---|---|---|
| Size of the battlefield (based on the entity) | Small | Medium | Large |
| Combat entity | Soldier | Ship | Aircraft |
| Number of aggregation levels | Many | Few | Few |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Lee, G.; Rabelo, L. A Systematic Review of the Multi-Resolution Modeling (MRM) for Integration of Live, Virtual, and Constructive Systems. Information 2020, 11, 480. https://doi.org/10.3390/info11100480
Lee K, Lee G, Rabelo L. A Systematic Review of the Multi-Resolution Modeling (MRM) for Integration of Live, Virtual, and Constructive Systems. Information. 2020; 11(10):480. https://doi.org/10.3390/info11100480
Chicago/Turabian StyleLee, Kyungeun, Gene Lee, and Luis Rabelo. 2020. "A Systematic Review of the Multi-Resolution Modeling (MRM) for Integration of Live, Virtual, and Constructive Systems" Information 11, no. 10: 480. https://doi.org/10.3390/info11100480
APA StyleLee, K., Lee, G., & Rabelo, L. (2020). A Systematic Review of the Multi-Resolution Modeling (MRM) for Integration of Live, Virtual, and Constructive Systems. Information, 11(10), 480. https://doi.org/10.3390/info11100480