
Characteristics of Three-Dimensional Sound Propagation in Western North Pacific Fronts

 ,
,
Abstract
:1. Introduction
2. Numerical Analysis of Sound Propagation
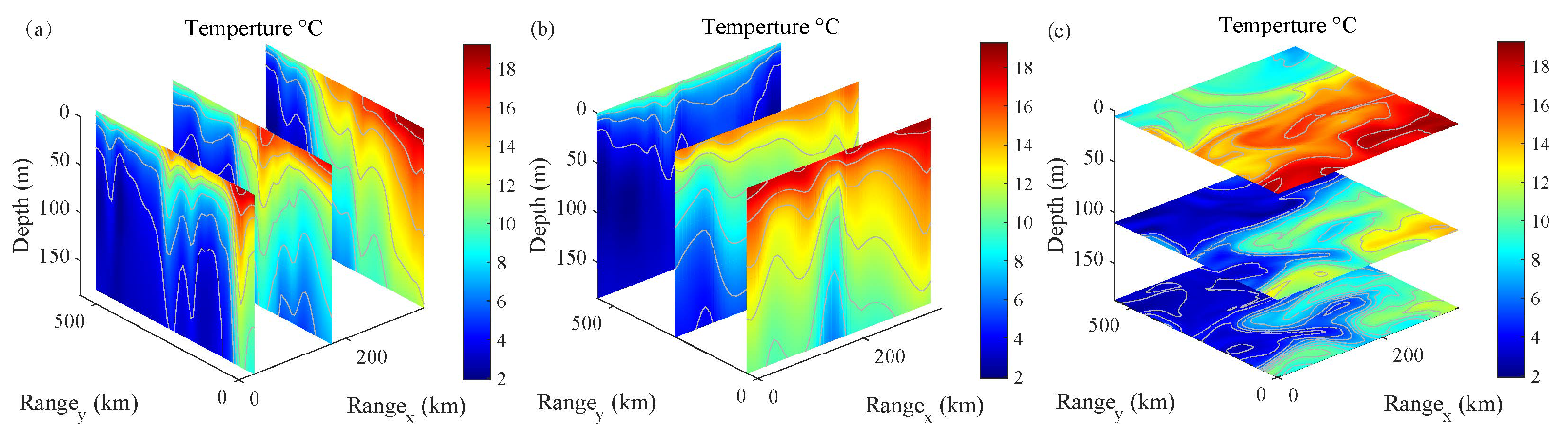
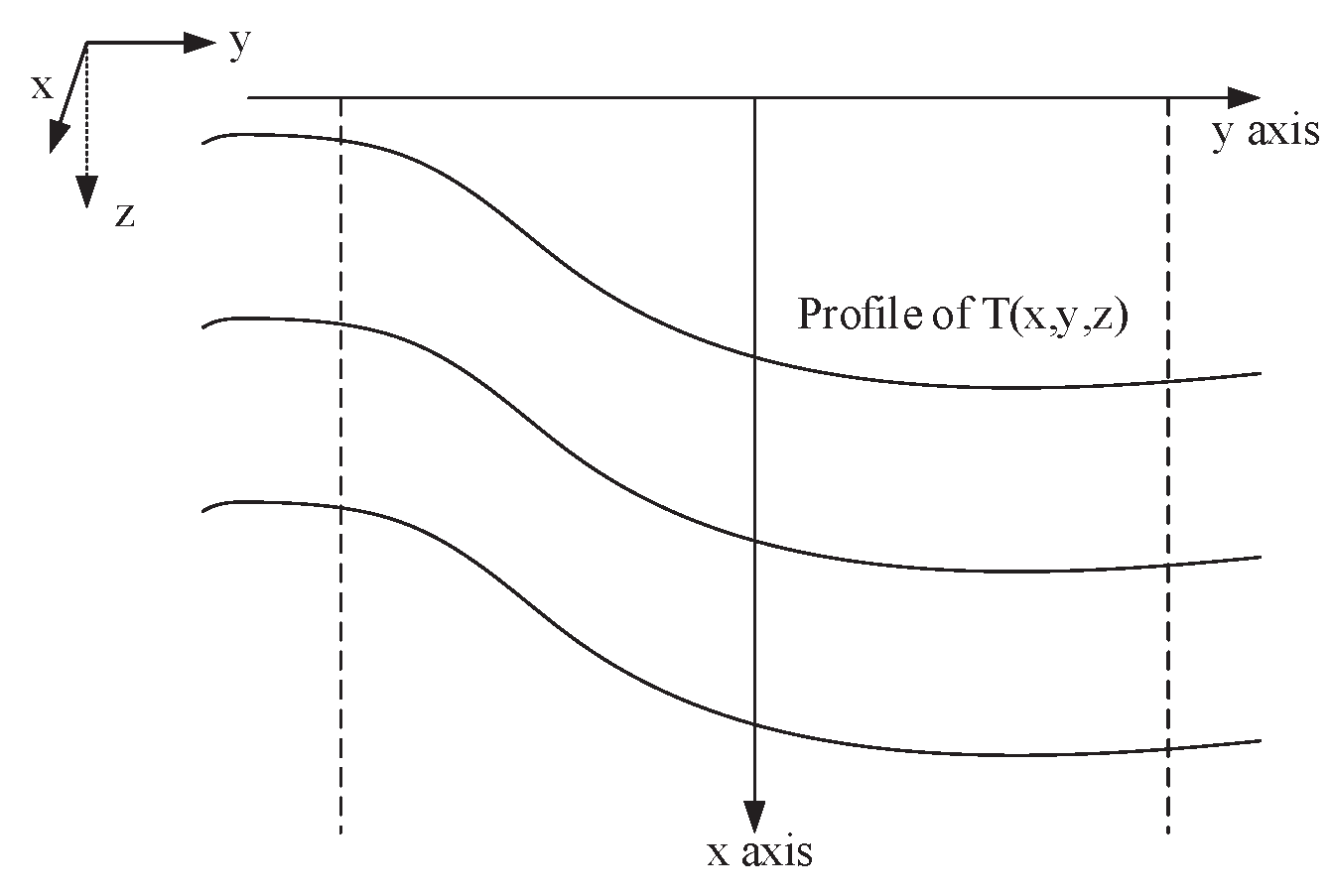
2.1. Distribution Model of Frontal Temperature and Salinity
- —surface temperature;
- —bottom temperature;
- —non-dimensional temperature profile;
- —along-steam distribution of the cross-frontal slope of the temperature;
- —cross-frontal distribution of the temperature gradient .
- —coordinates of observation point;
- —coordinates of interpolated point;
- d—distance from to ;
- N—total number of observation points used in interpolation.
- t—temperature variable ;
- —interpolated temperature in degrees Celsius;
- —interpolated salinity in parts per thousand;
- z—depth in kilometres.
2.2. Sound Propagation Model
- —angular frequency of source signal;
- X—receiver position;
- —source position;
- z—depth in kilometres.
- X—ray trajectory ;
- —travel times of the acoustic rays;
- j—number of acoustic rays;
- —amplitude of j th acoustic ray;
- s—arclength along the ray;
- —ray trajectory;
- c—sound speed at the position X.
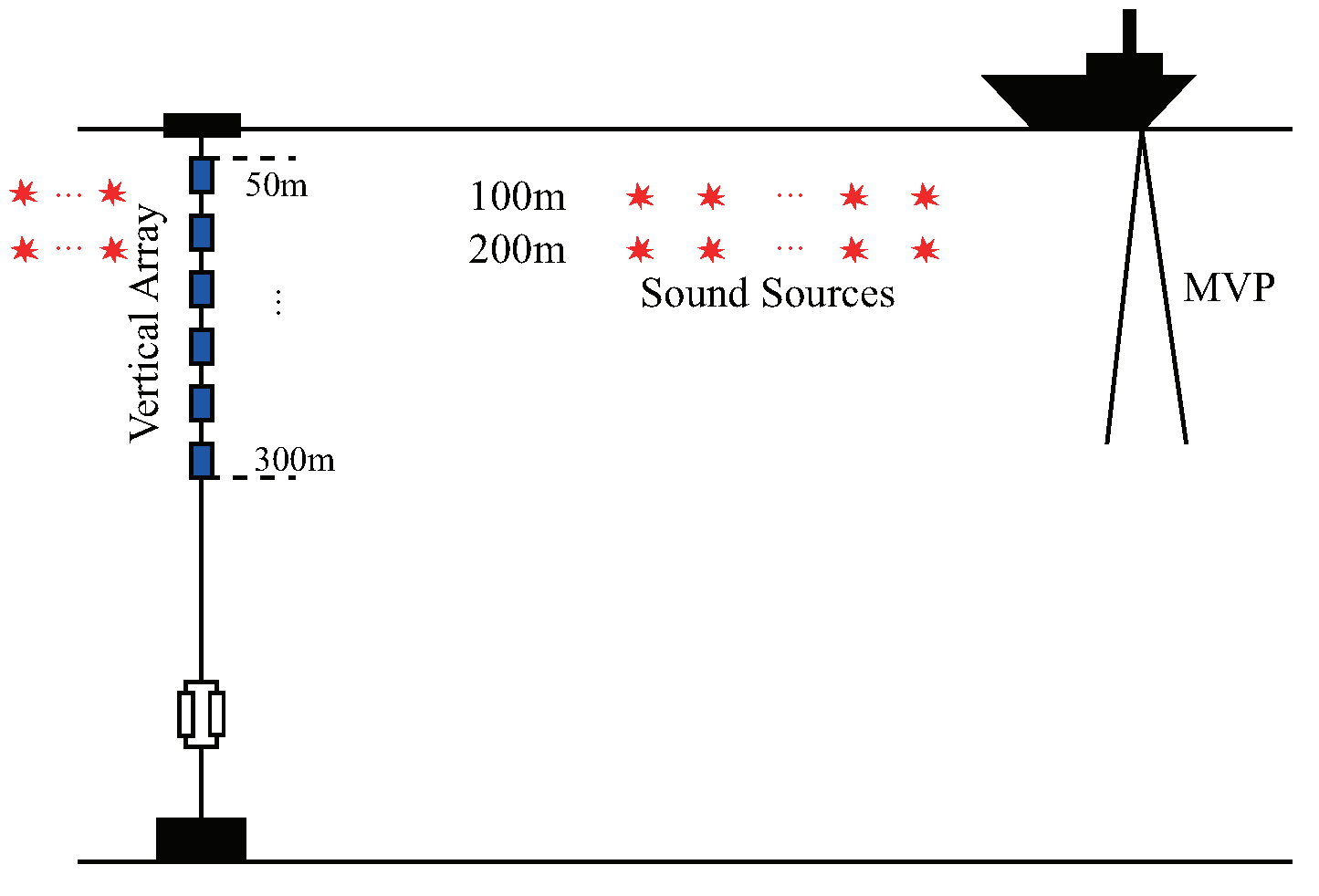
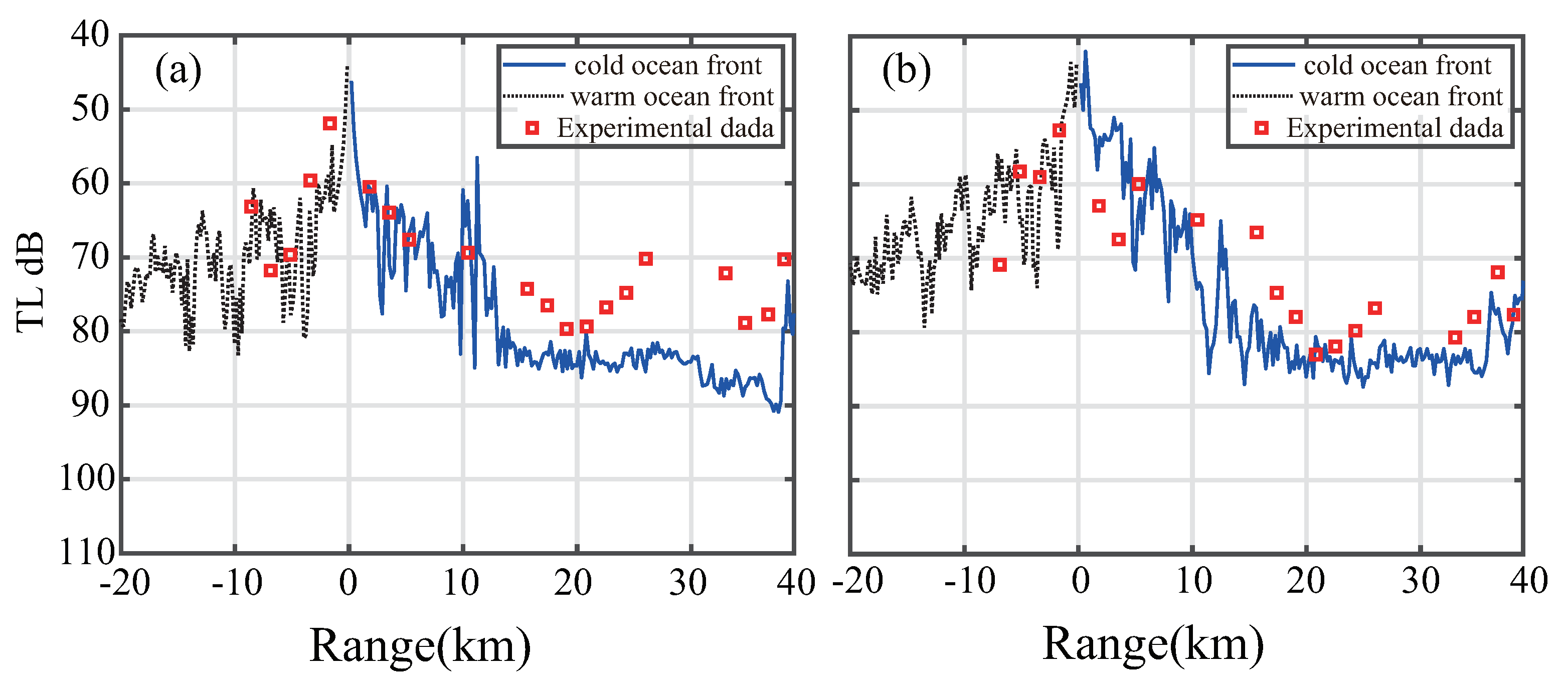
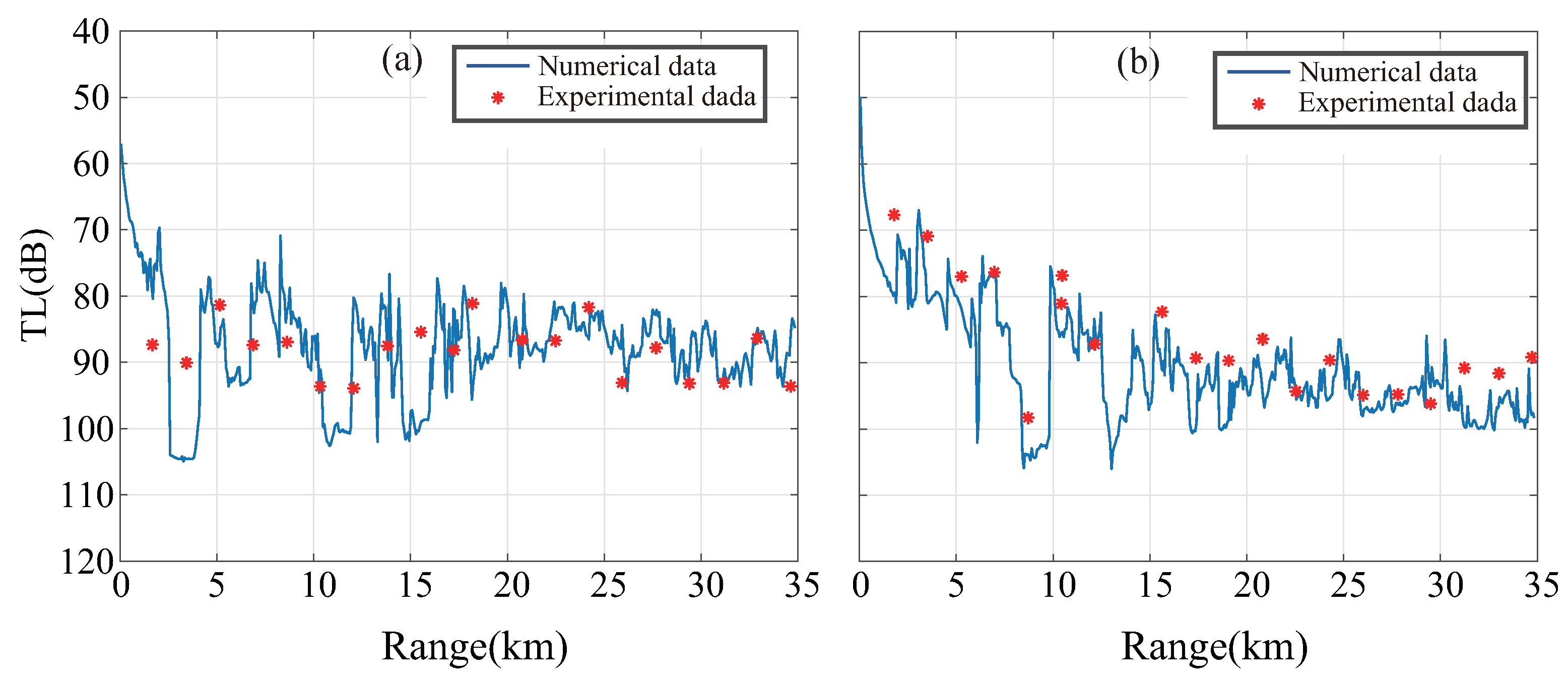
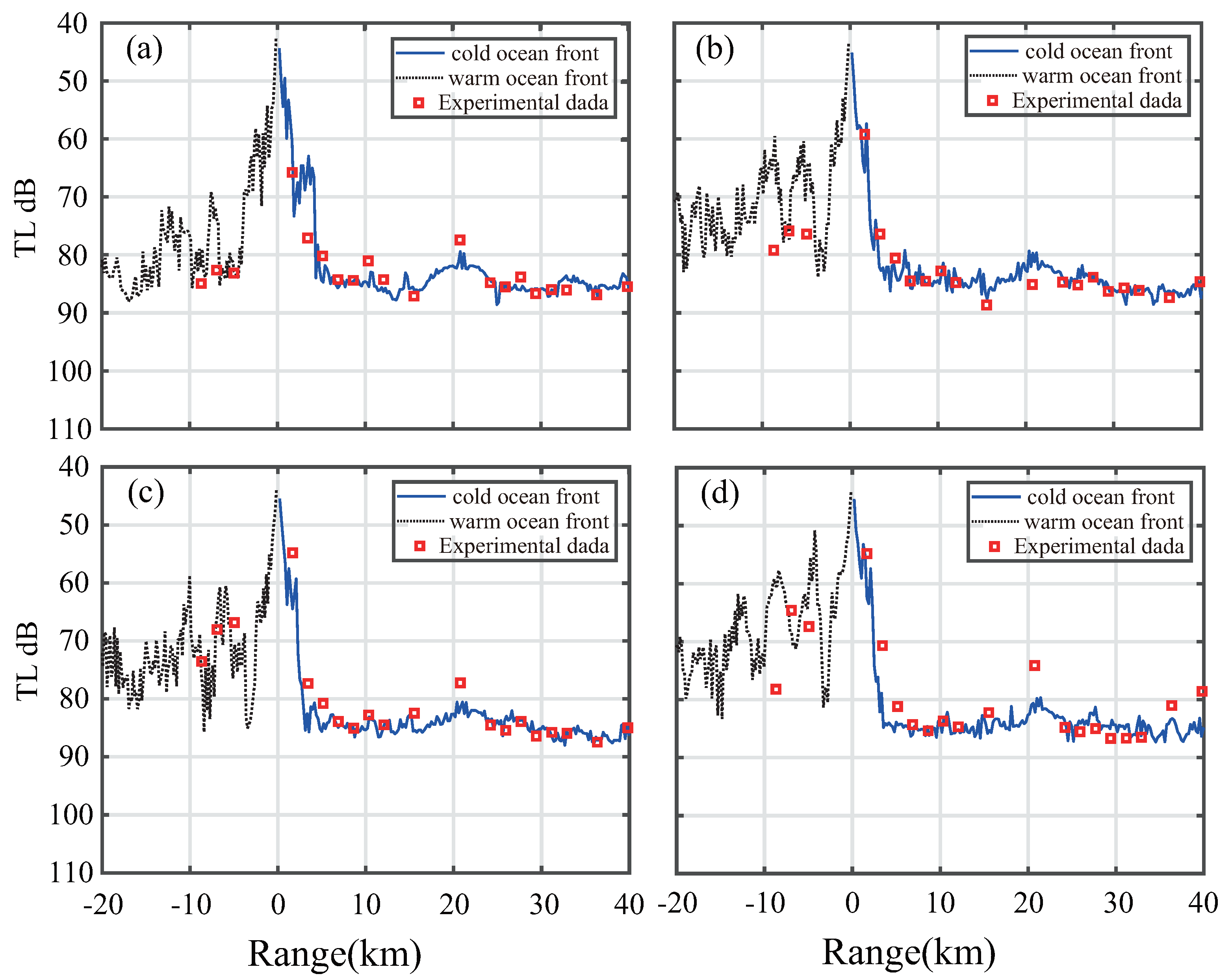
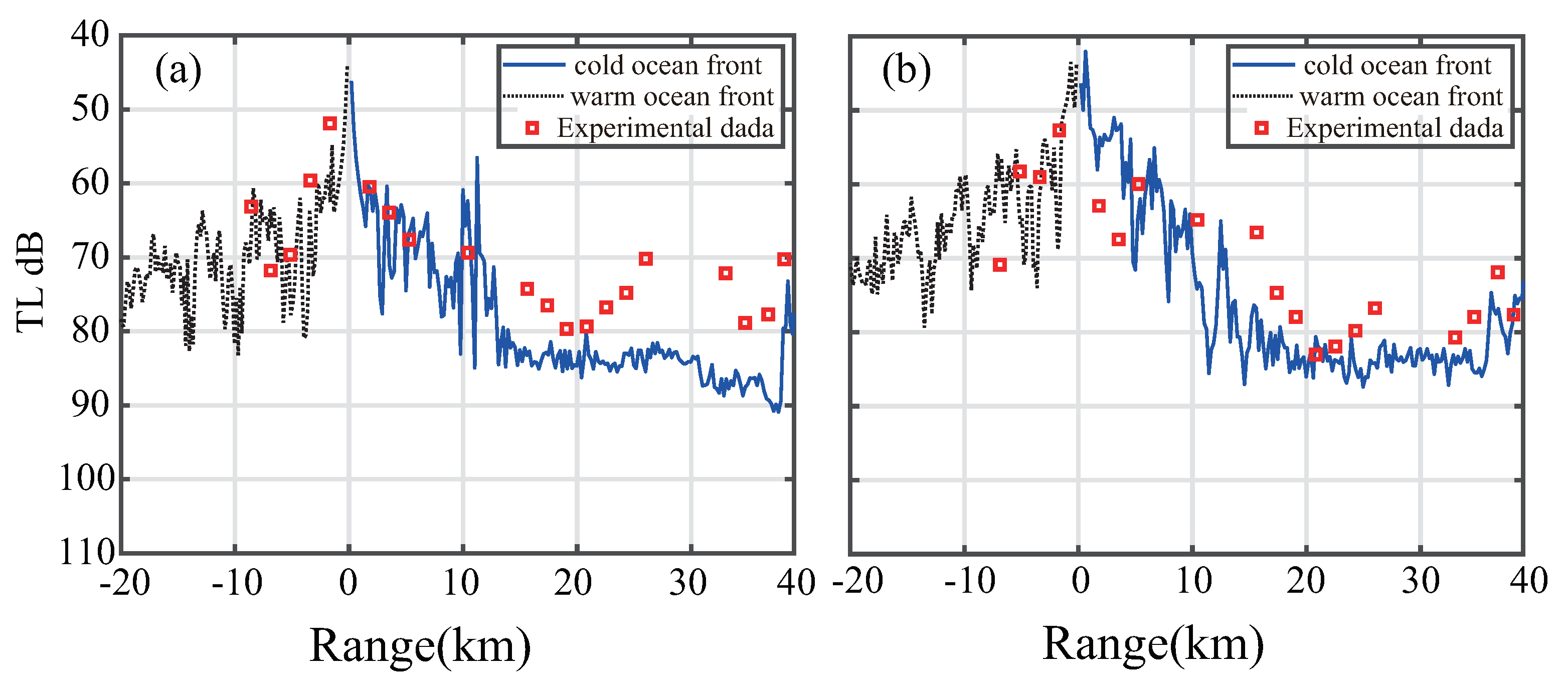
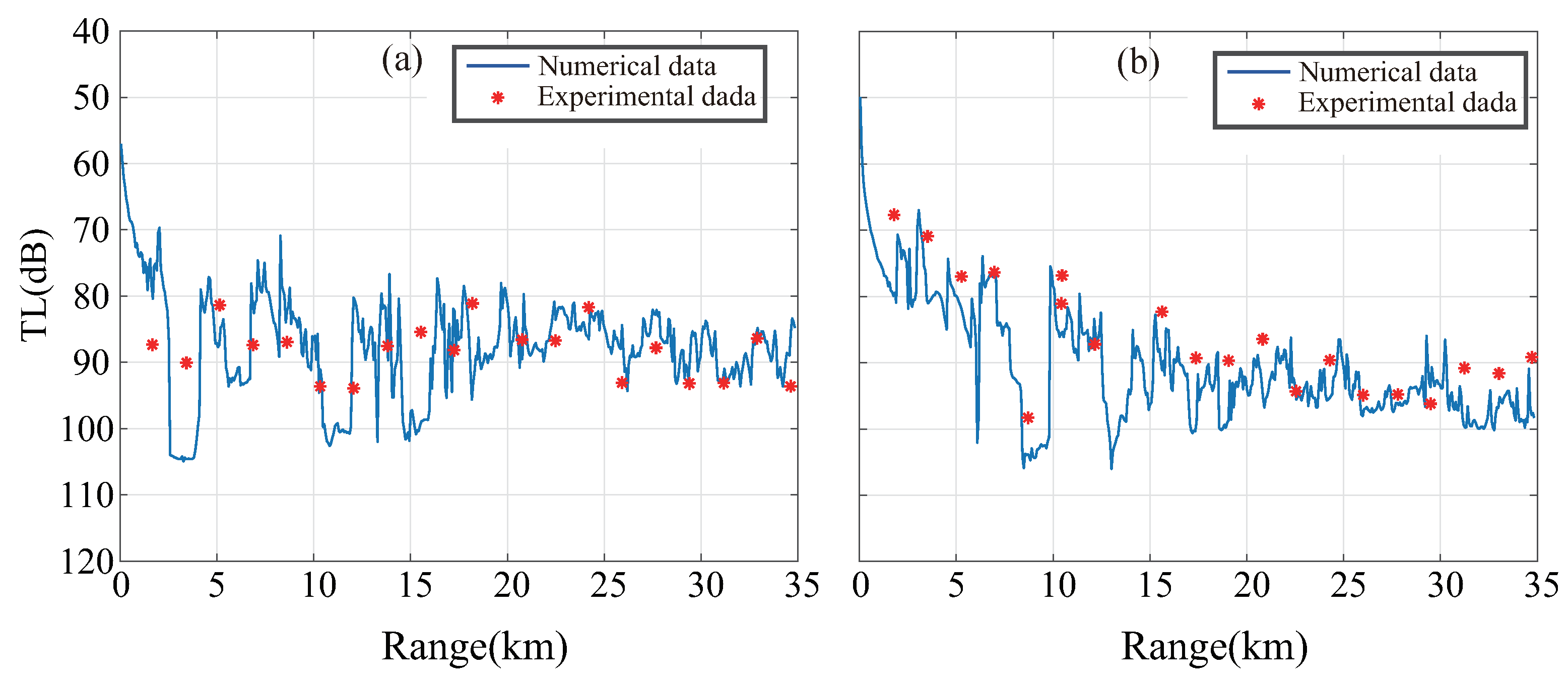
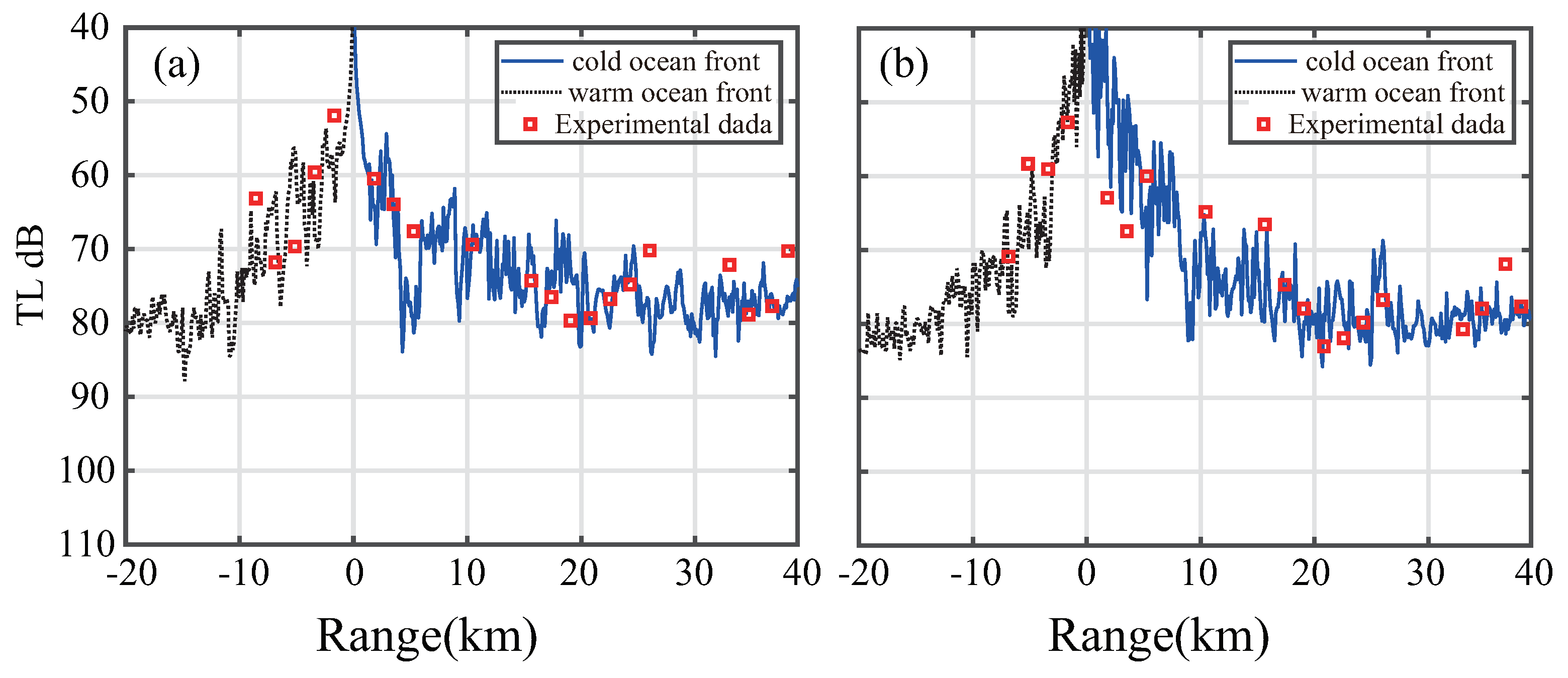
3. Comparison between Experimental and Numerical Simulation Results
4. Discussion and Analysis Northwest Pacific Oceanic Front Sound Propagation and Horizontal Refraction Character
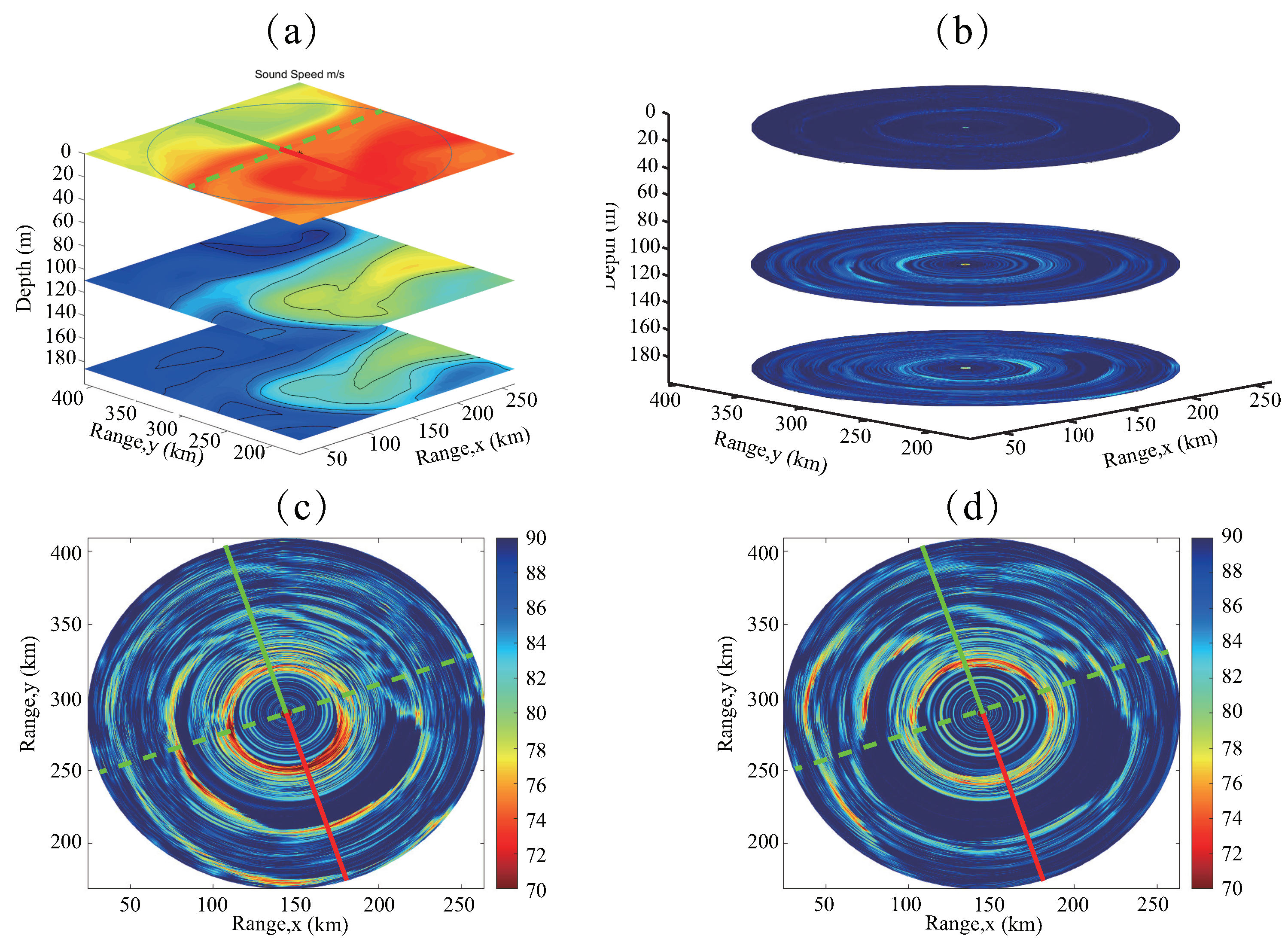
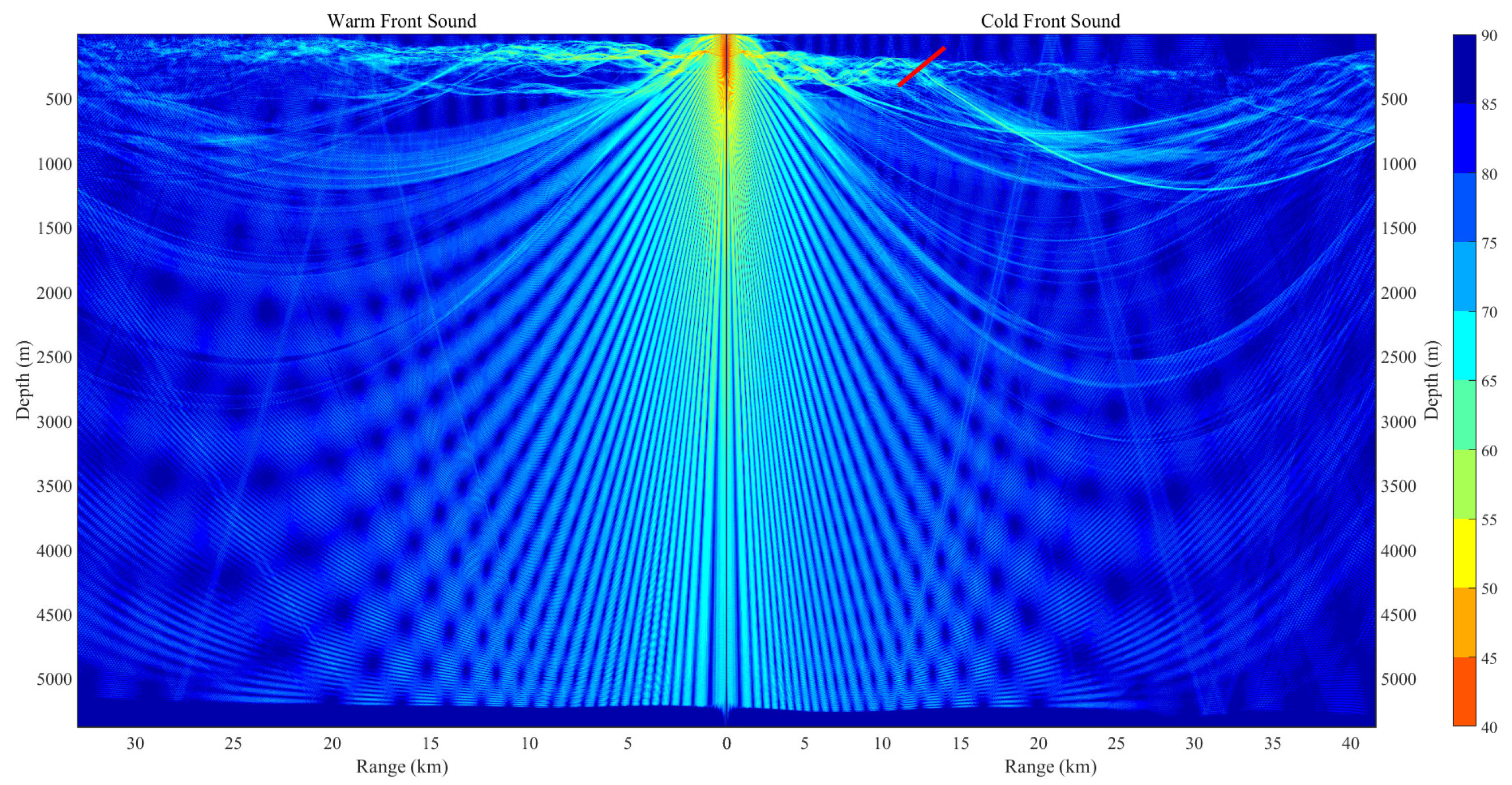
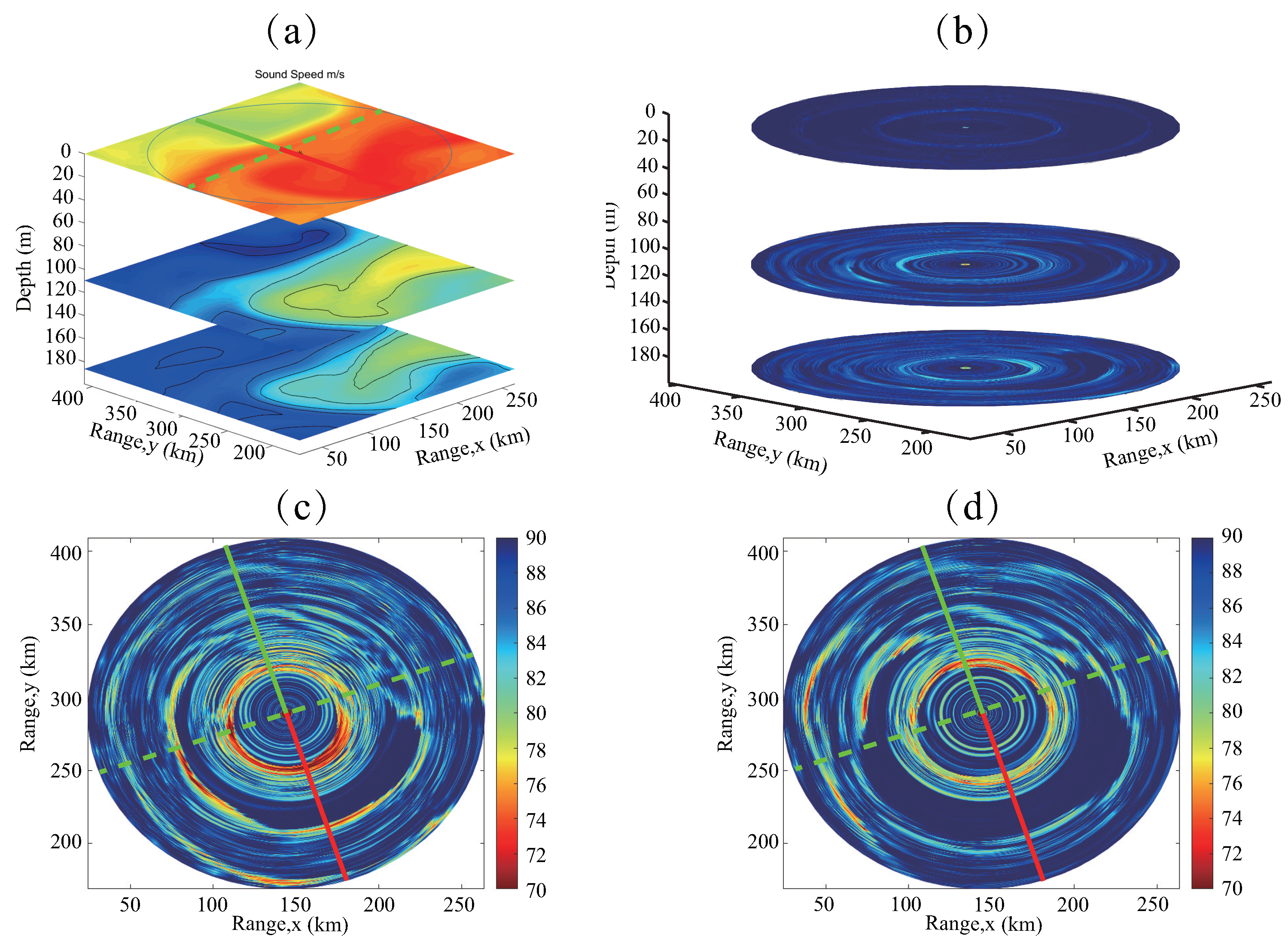
4.1. 3D Sound Propagation at Different Depths
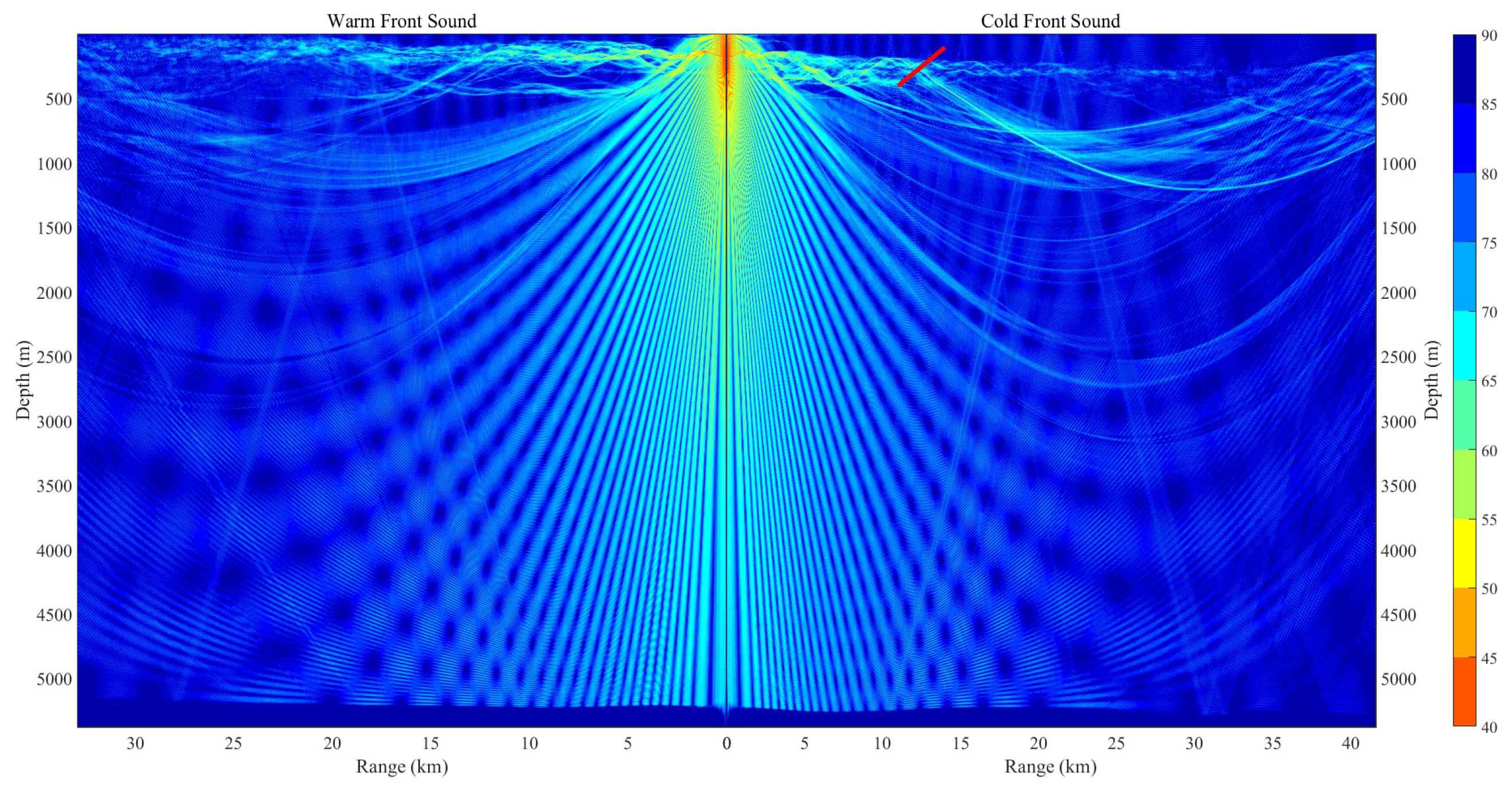
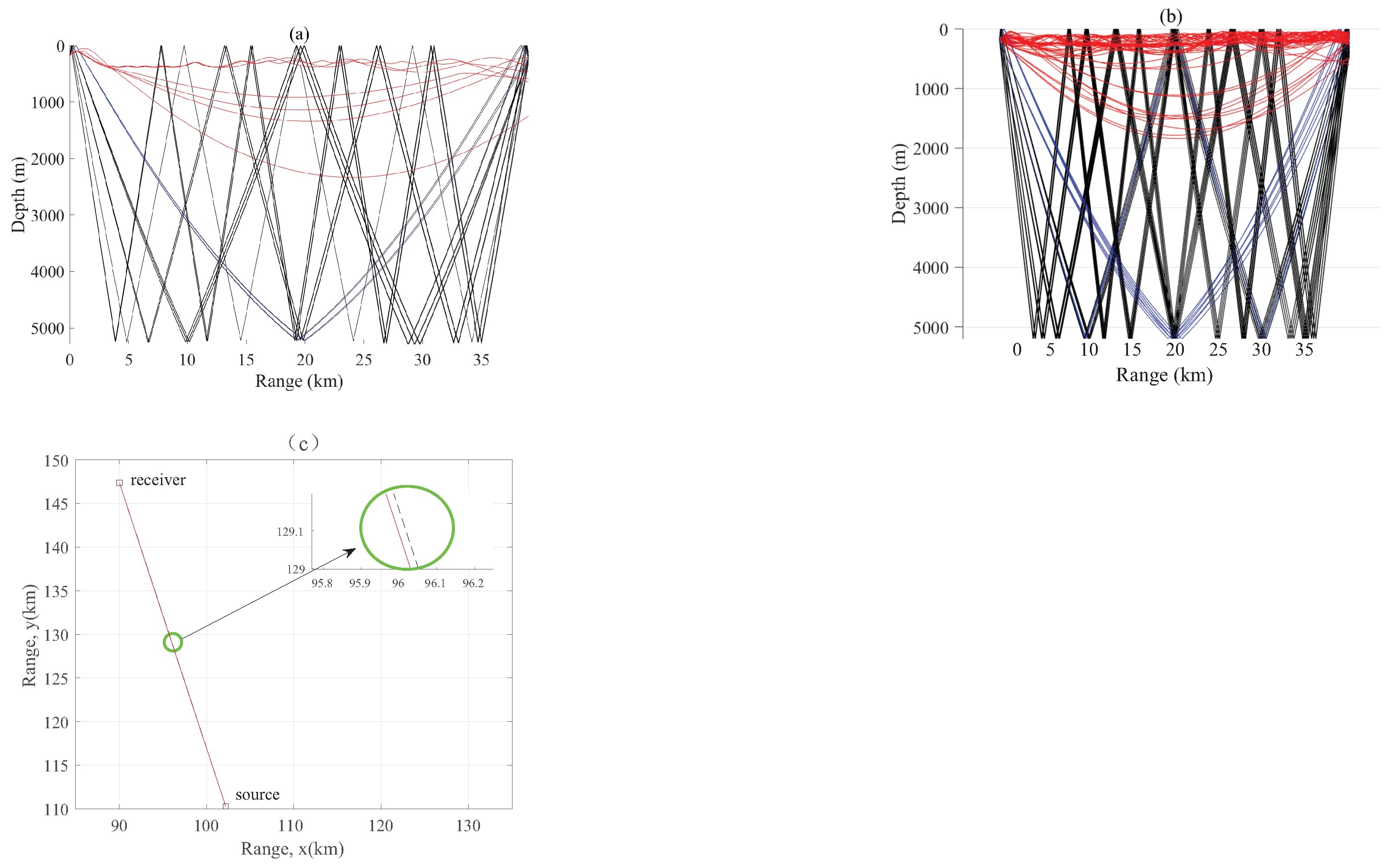
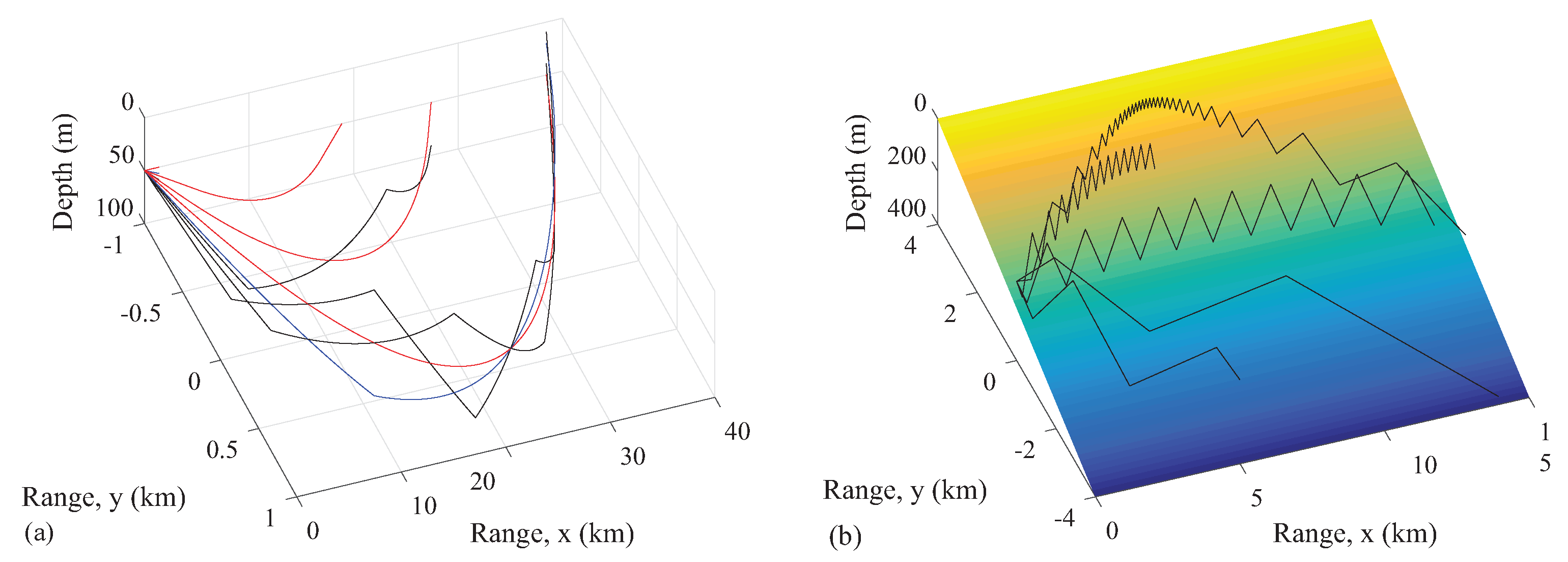
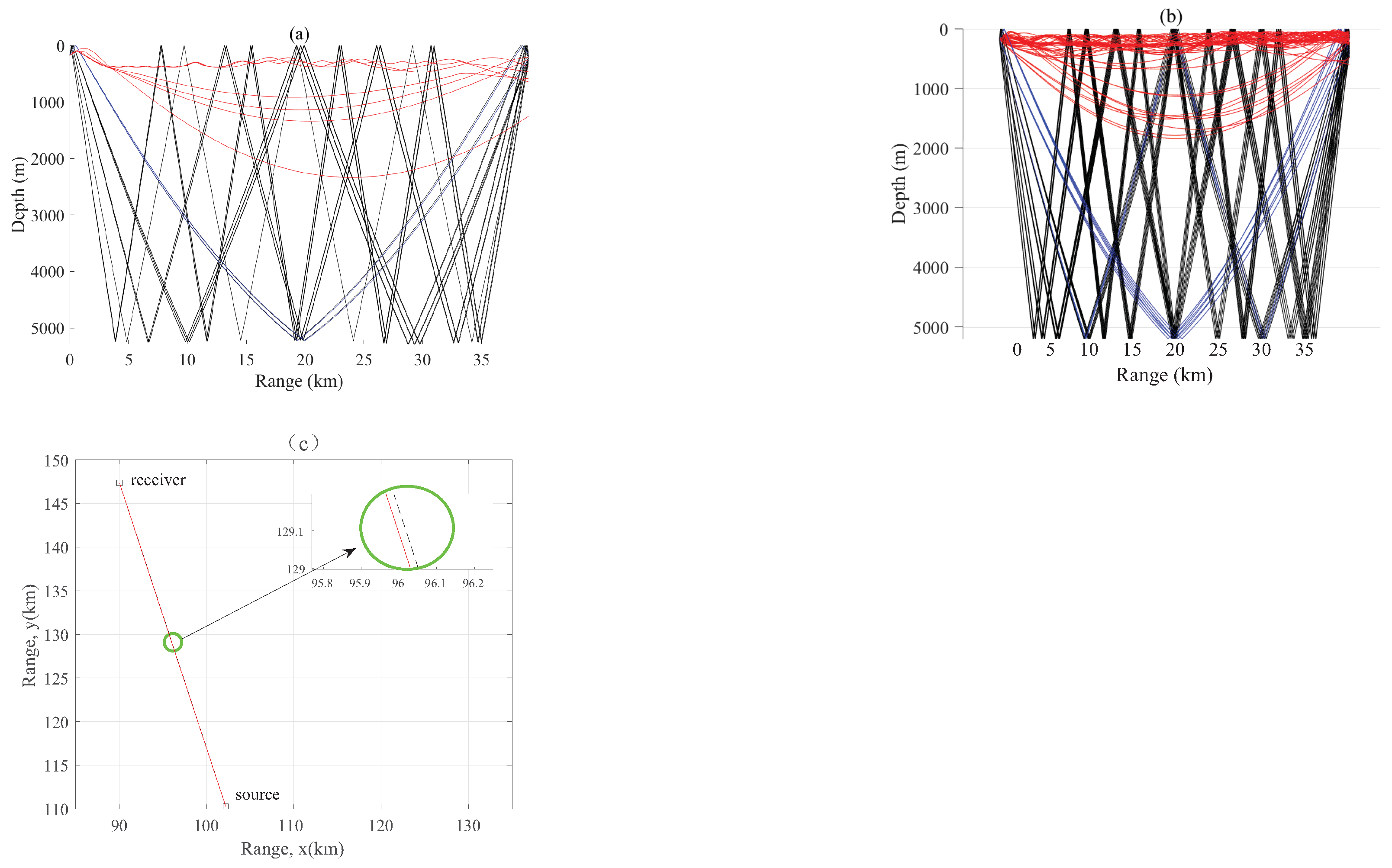
4.2. 3D Acoustic Ray Paths Explanations
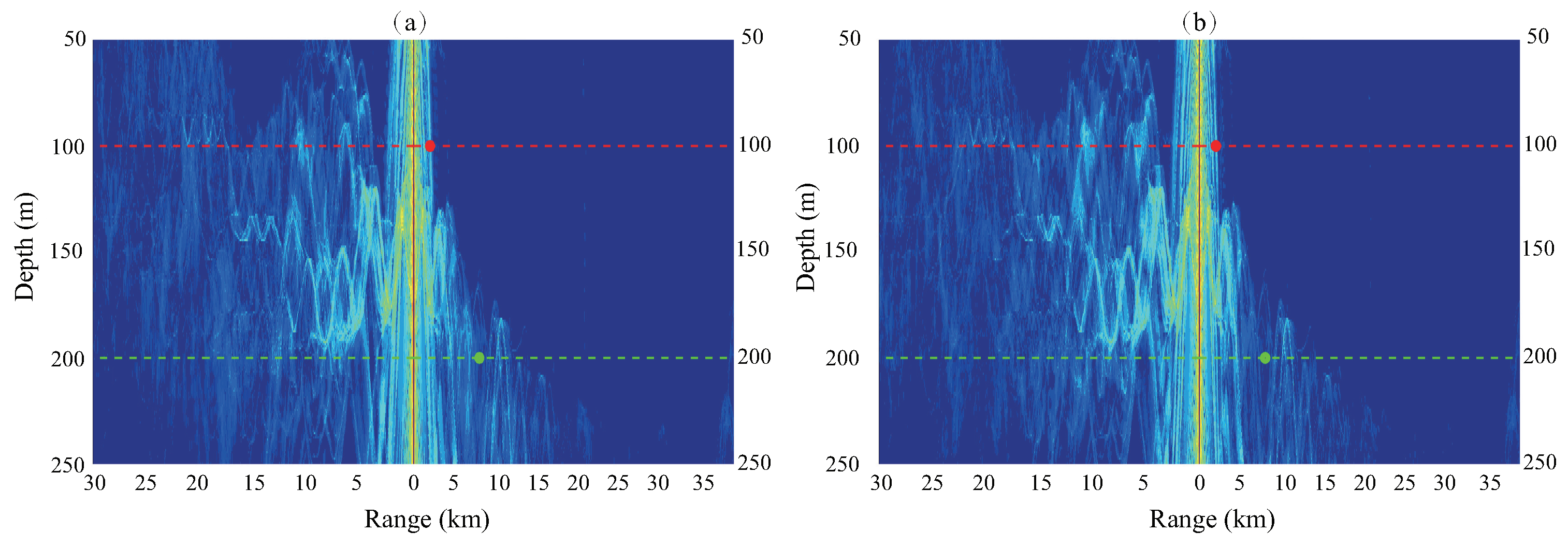
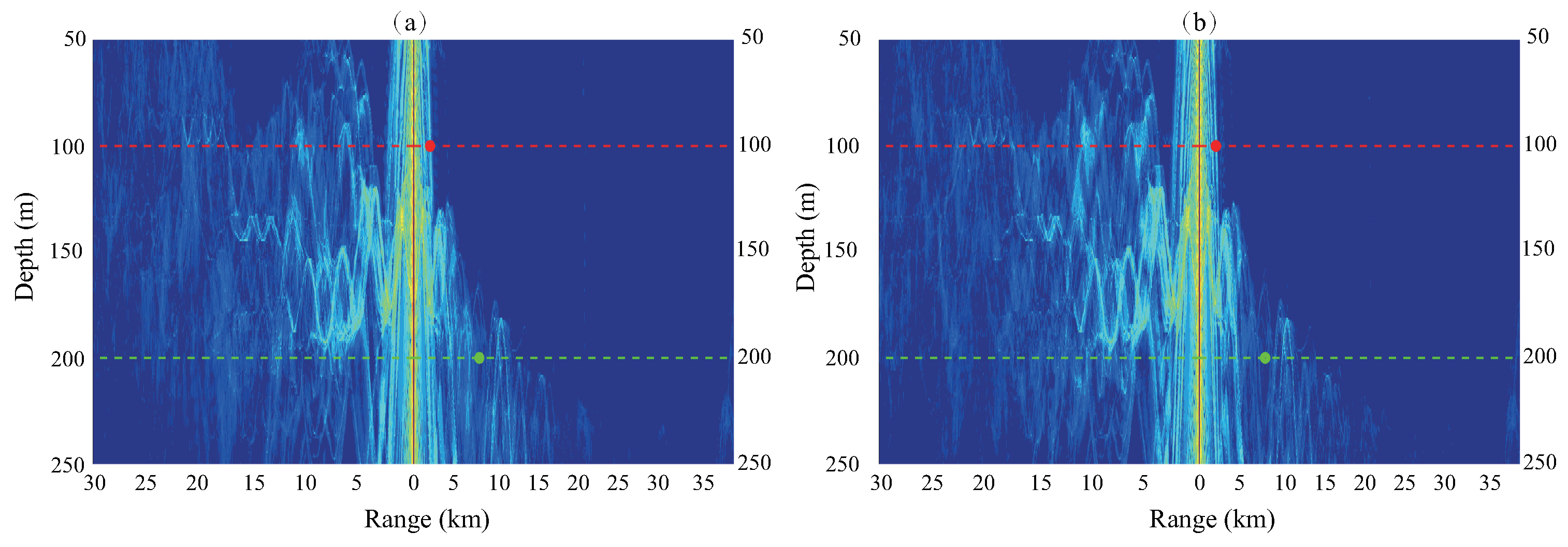
4.3. Interpretation of Acoustic Anomaly Distribution Use 3D Propagation Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bowman, M.J.; Esaias, W.E. Oceanic Fronts in Coastal Processes; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Gangopadhyay, A.; Robinson, A.R. Feature-oriented regional modeling of oceanic fronts. Dyn. Atmos. Ocean. 2002, 36, 201–232. [Google Scholar] [CrossRef] [Green Version]
- Henrick, R.; Siegmann, W.; Jacobson, M. General analysis of ocean eddy effects for sound transmission applications. J. Acoust. Soc. Am. 1977, 62, 860–870. [Google Scholar] [CrossRef]
- Henrick, R.; Burkom, H. The effect of range dependence on acoustic propagation in a convergence zone environment. J. Acoust. Soc. Am. 1983, 73, 173–182. [Google Scholar] [CrossRef]
- Mahadevan, A.; Tandon, A. An analysis of mechanisms for submesoscale vertical motion at ocean fronts. Ocean Model. 2006, 14, 241–256. [Google Scholar] [CrossRef]
- Sokolov, S.; Rintoul, S.R. Structure of Southern Ocean fronts at 140 E. J. Mar. Syst. 2002, 37, 151–184. [Google Scholar] [CrossRef]
- Levine, E.R.; White, W.B. Bathymetric influences upon the character of North Pacific fronts, 1976–1980. J. Geophys. Res. Ocean. 1983, 88, 9617–9625. [Google Scholar] [CrossRef]
- Yang, W.; Li, B.; Gao, L.; Li, R.; Liu, C.; Ma, L. Ocean front locations in the southwest pacific. Chin. J. Polar Res. 2020, 32, 469–482. (In Chinese) [Google Scholar]
- Nakamura, H.; Inoue, R.; Nishina, A.; Nakano, T. Seasonal variations in salinity of the North Pacific Intermediate Water and vertical mixing intensity over the Okinawa Trough. J. Oceanogr. 2021, 77, 199–213. [Google Scholar] [CrossRef]
- Liu, Z.; Hou, Y. Kuroshio Front in the East China sea from satellite SST and remote sensing data. IEEE Geosci. Remote Sens. Lett. 2011, 9, 517–520. [Google Scholar] [CrossRef]
- Xie, L.; Pallàs-Sanz, E.; Zheng, Q.; Zhang, S.; Zong, X.; Yi, X.; Li, M. Diagnosis of 3D vertical circulation in the upwelling and frontal zones east of Hainan Island, China. J. Phys. Oceanogr. 2017, 47, 755–774. [Google Scholar] [CrossRef]
- Ying, K.; Linhui, P. Modal wave number spectrum for mesoscale eddies. J. Ocean Univ. Qingdao 2003, 2, 218–223. [Google Scholar] [CrossRef]
- Nakamura, Y.; Noguchi, T.; Tsuji, T.; Itoh, S.; Niino, H.; Matsuoka, T. Simultaneous seismic reflection and physical oceanographic observations of oceanic fine structure in the Kuroshio extension front. Geophys. Res. Lett. 2006, 33, L23605. [Google Scholar] [CrossRef]
- Neubert, J.A. Mean multipath intensity relation for sound propagation through a random ocean front. J. Acoust. Soc. Am. 1982, 72, 222–225. [Google Scholar] [CrossRef]
- Liu, Q. Research on Sound Propagation in the Ocean Mesoscale Phenomenon. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2006. [Google Scholar]
- Lee, D.; Saad, Y.; Schultz, M.H. An Efficient Method for Solving the Three-Dimensional Wide Angle Wave Equation; Technical Report; Yale University: New Haven, CT, USA, 1986. [Google Scholar]
- Wang, N.; Liu, J.Z.; Gao, D.Z.; Gao, W.; Wang, H.Z. An overview of the 2005 YFIAE: Yellow Sea Oceanic Front and Internal Waves Acoustic Experiment. J. Acoust. Soc. Am. 2008, 124, 2444. [Google Scholar] [CrossRef]
- Jian, Y.; Zhang, J.; Jia, Y. A Sound Speed Computation Model in Oceanic Front Area and Its Application in Studying the Effect on Sound Propagation. Adv. Mar. Sci. 2006, 24, 166–172. [Google Scholar]
- Guo, T.; Gao, W. Phenomenon of ocean front and it impact on the sound propagation. Mar. Forecasts 2015, 32, 80–88. (In Chinese) [Google Scholar]
- Chen, C.; Yang, K.; Duan, R.; Ma, Y. Acoustic propagation analysis with a sound speed feature model in the front area of Kuroshio Extension. Appl. Ocean Res. 2017, 68, 1–10. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, K.; Xue, R.; Huang, C.; Chen, C. Convergence zone analysis for a source in the front area of Kuroshio Extension based on Argo data. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–4. [Google Scholar]
- Shapiro, G.; Chen, F.; Thain, R. The effect of ocean fronts on acoustic wave propagation in the Celtic Sea. J. Mar. Syst. 2014, 139, 217–226. [Google Scholar] [CrossRef]
- Calado, L.; Gangopadhyay, A.; Da Silveira, I. Feature-oriented regional modeling and simulations (FORMS) for the western South Atlantic: Southeastern Brazil region. Ocean Model. 2008, 25, 48–64. [Google Scholar] [CrossRef]
- Coppens, A.B. Simple equations for the speed of sound in Neptunian waters. J. Acoust. Soc. Am. 1981, 69, 862–863. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics; Springer: New York, NY, USA, 2011. [Google Scholar]
- Hovem, J.M. Ray Trace Modeling of Underwater Sound Propagation. Documentation and Use of the PlaneRay Model; SINTEF: Trondheim, Norway, 2011. [Google Scholar]
- Porter, M.B. The Bellhop Manual and User’s Guide: Preliminary Draft; Technical report; Heat, Light, and Sound Research, Inc.: La Jolla, CA, USA, 2011; Volume 260. [Google Scholar]
- Porter, M.B. Beam tracing for two- and three-dimensional problems in ocean acoustics. J. Acoust. Soc. Am. 2019, 146, 2016–2029. [Google Scholar] [CrossRef] [PubMed]
- Červeny, V.; Pšenčík, I. Gaussian beams and paraxial ray approximation in three-dimensional elastic inhomogeneous media. J. Geophys. 1983, 53, 1–15. [Google Scholar]
- Lynch, J.F.; Colosi, J.A.; Gawarkiewicz, G.G.; Duda, T.F.; Pierce, A.D.; Badiey, M.; Katsnelson, B.G.; Miller, J.E.; Siegmann, W.; Chiu, C.S.; et al. Consideration of fine-scale coastal oceanography and 3-D acoustics effects for the ESME sound exposure model. IEEE J. Ocean. Eng. 2006, 31, 33–48. [Google Scholar] [CrossRef]
- Nagai, T.; Tandon, A.; Yamazaki, H.; Doubell, M.J.; Gallager, S. Direct observations of microscale turbulence and thermohaline structure in the Kuroshio Front. J. Geophys. Res. Ocean. 2012, 117, C08013. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Parameter Value (Range) |
|---|---|
| Frequency Range | 10 Hz–20 kHz +3/−3 dB |
| Receiving Sensitivity | −203 dB re 1 V/Pa |
| Amplification Gain | 20 dB |
| Filter Bandwidth | 20 kHz |
| Sampling Rate | 10 kHz 24 bit |
| Network Specific Interfaces | 100 M/10 M Based TCP/IP |
| Supply Voltage and Current | 19 V DC and 2 A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Piao, S.; Zhang, M.; Zhang, S.; Guo, J.; Gong, L. Characteristics of Three-Dimensional Sound Propagation in Western North Pacific Fronts. J. Mar. Sci. Eng. 2021, 9, 1035. https://doi.org/10.3390/jmse9091035
Liu J, Piao S, Zhang M, Zhang S, Guo J, Gong L. Characteristics of Three-Dimensional Sound Propagation in Western North Pacific Fronts. Journal of Marine Science and Engineering. 2021; 9(9):1035. https://doi.org/10.3390/jmse9091035
Chicago/Turabian StyleLiu, Jiaqi, Shengchun Piao, Minghui Zhang, Shizhao Zhang, Junyuan Guo, and Lijia Gong. 2021. "Characteristics of Three-Dimensional Sound Propagation in Western North Pacific Fronts" Journal of Marine Science and Engineering 9, no. 9: 1035. https://doi.org/10.3390/jmse9091035
APA StyleLiu, J., Piao, S., Zhang, M., Zhang, S., Guo, J., & Gong, L. (2021). Characteristics of Three-Dimensional Sound Propagation in Western North Pacific Fronts. Journal of Marine Science and Engineering, 9(9), 1035. https://doi.org/10.3390/jmse9091035