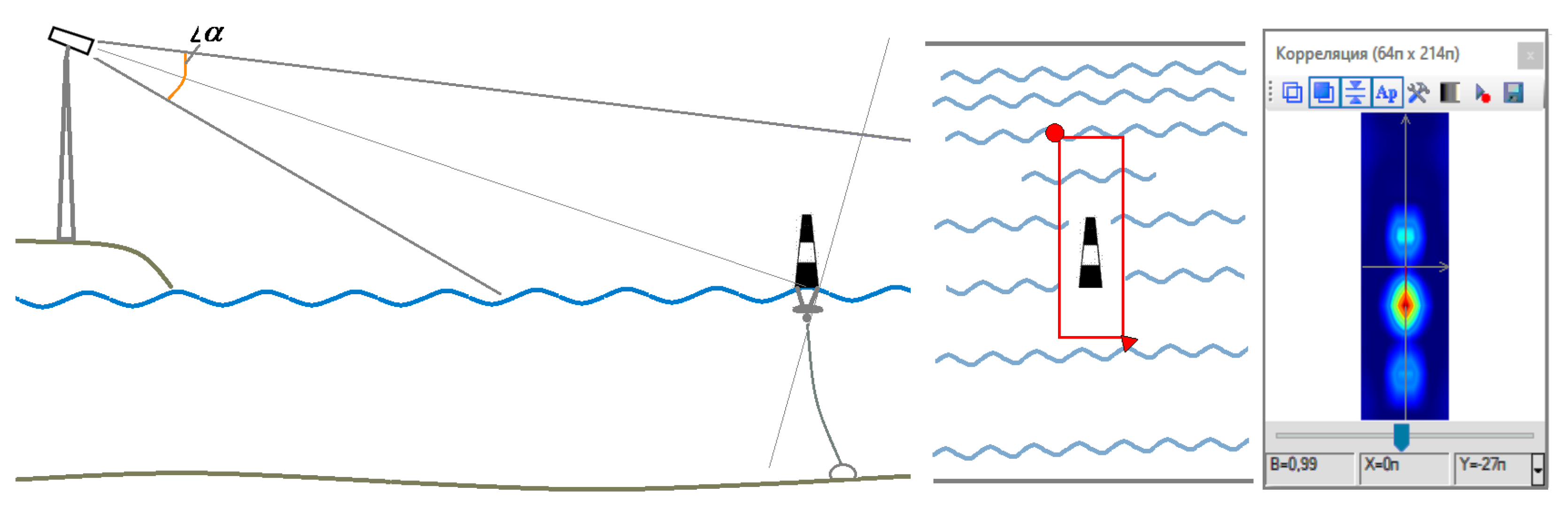
It can be noted that, strictly speaking, the actual size of the pixel K in the observation plane, associated with the marker, is not constant, but depends on its location on the frame. Knowing the calibration parameters of the camera and the height of its position above sea level, the distance to the marker object and the signal of vertical displacements of the marker can be measured more precisely. However, this would most likely not allow QAVIS to process a video in real time. If necessary, based on the known calibration data, the previously recorded signal can be corrected. The noted problem with the variable pixel size is especially critical for cameras with wide-angle lenses (vertical viewing angle ) but less critical for narrow-angle ones , which are mainly used for tracking remote marker objects.
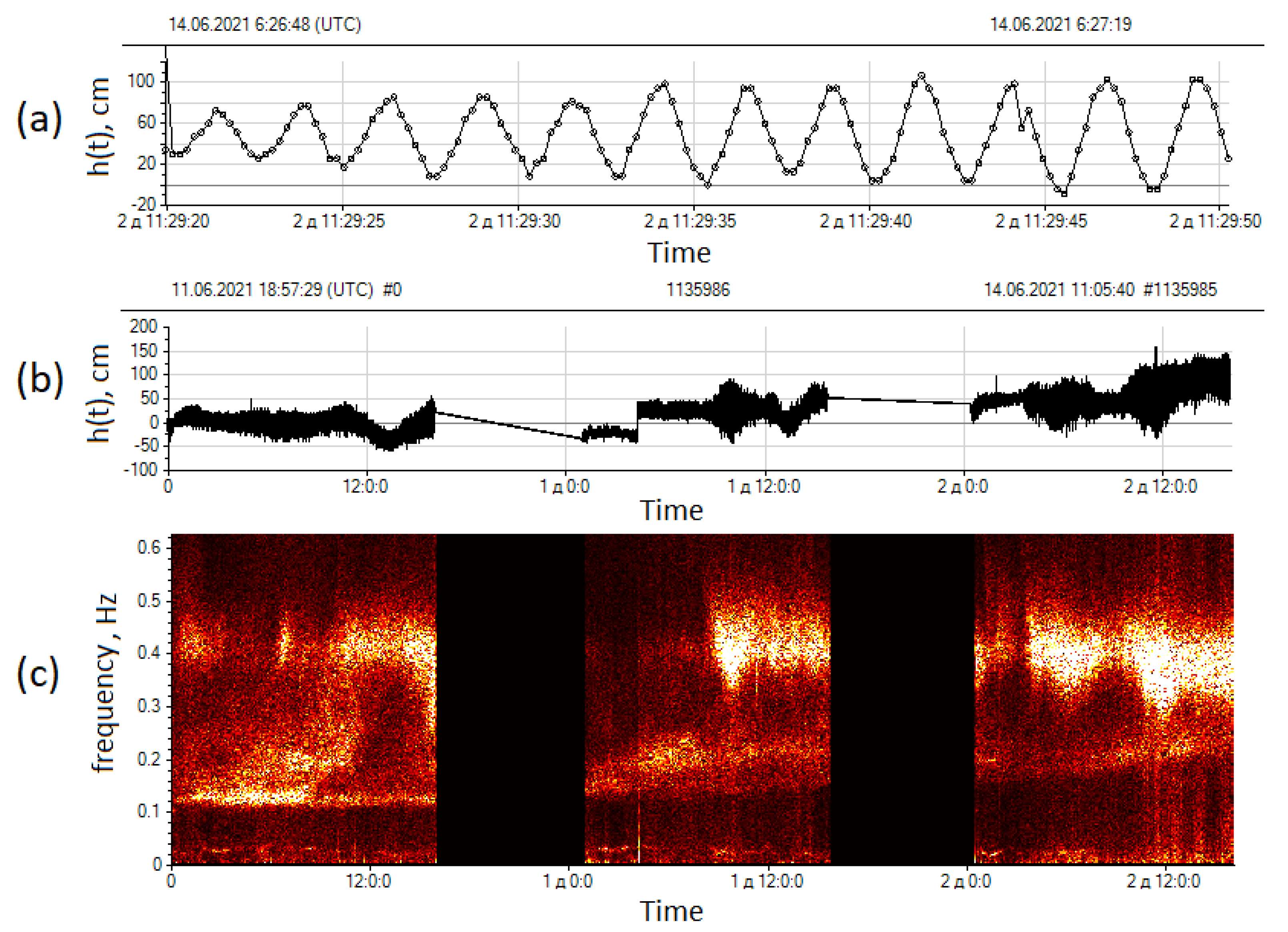
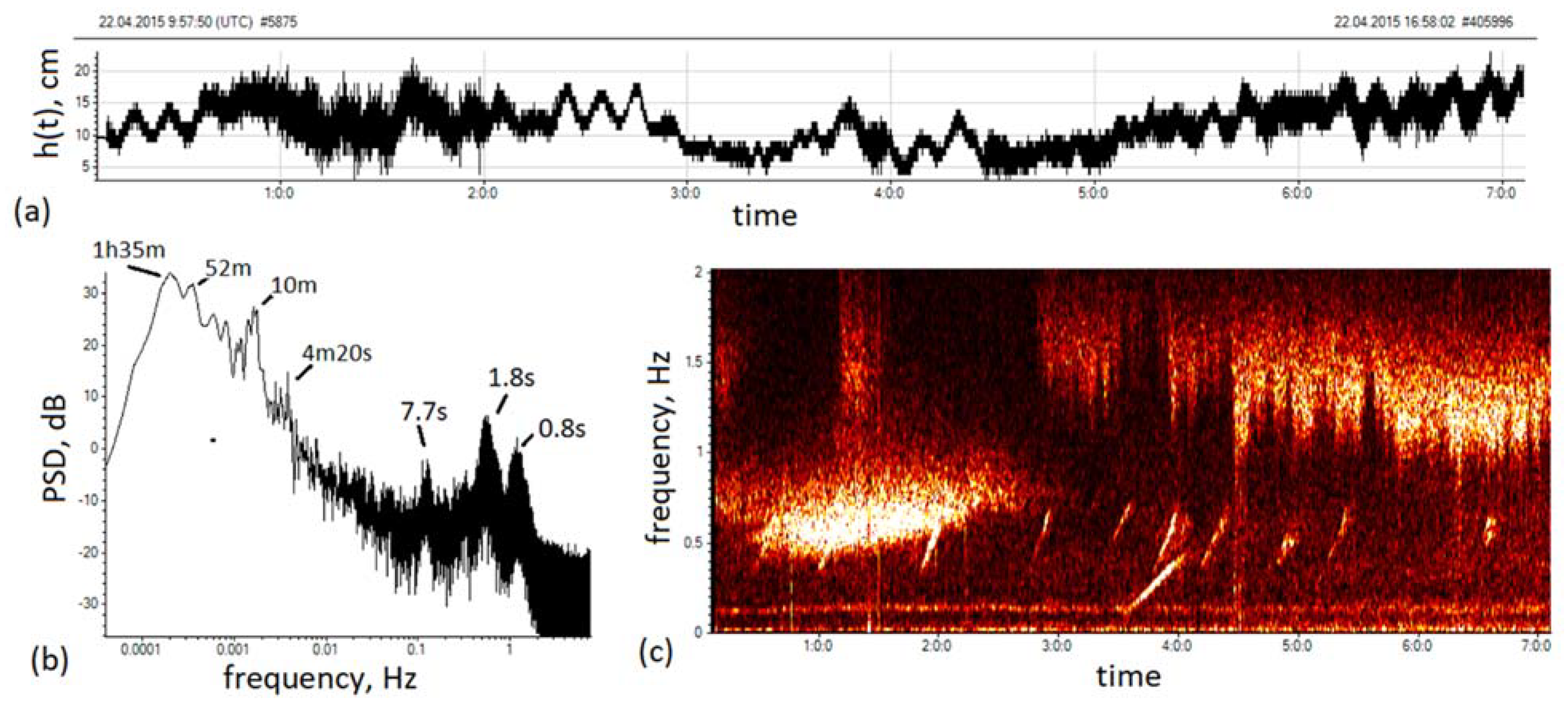
In addition to the frequency composition of the surface wave, it is possible to estimate the significant wave height (SWH) for different wave systems. Below is an explanation of the technology. Based on viewing the spectrogram, the time interval was determined, in which the wave system of interest to the user was visible and stationary. For example, for the swell in
Figure 11c, it is logical to choose the first half of the first day.
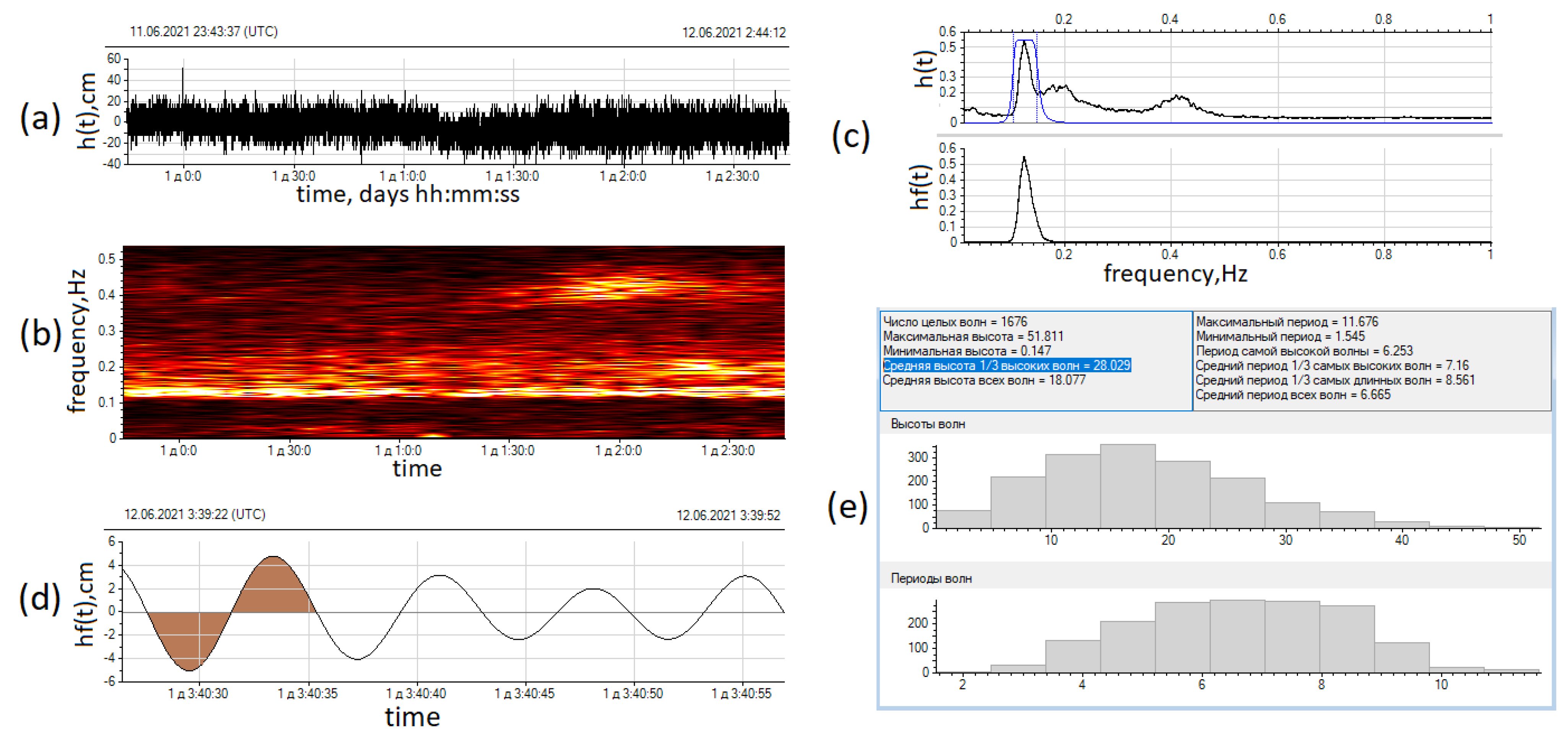
Figure 12a,b shows a three-hour recording of the
h(
t) signal from this area and its spectrogram. It is evident that the swell component, which corresponds to a continuous bright stripe in the lower part of the spectrogram, was stationary. In the Fourier spectrum of the
h(
t) signal, the leftmost peak corresponded to the swell waves, as shown in the upper half of
Figure 12c. The blue curve shows a band-pass filter applied for frequency filtering of the swell component
hf(
t) from the total signal
h(
t). The spectrum shown in the lower half of
Figure 12c confirmed that the filtration was correct.
Figure 12d shows a 30-s fragment of the
hf(
t) signal. Using the downward zero-crossing algorithm [
18], individual waves were selected from
hf(
t) (one of them is shaded in brown in
Figure 12d); for each wave, two characteristics were determined—height (the difference between the maximum and minimum values) and duration (period).
Figure 12e shows an OceanSP information window with the results of the statistical analysis of the extracted wave set. One of the statistics is SWH, the average height of 1/3 of the highest waves; in this case, SWH = 28 cm. In addition to statistics, the information window displays histograms of wave distribution by their heights and durations (periods).
The same analysis was performed to estimate the SWH of intense wind waves observed at the end of the third day of the study discussed above. SWH, in that case, was equal to 88 cm. Note that the described method can give overestimated SWH estimates if the frequency peak of the wave system of interest is observed in the spectrum against the background of powerful frequency components caused by noise or other wave systems close in frequency.
Experimental Study of One Simple Scheme for Obtaining Subpixel Resolution When Tracking Objects
On 11 June 2021, a small experimental study was carried out to practically investigate the possibility of achieving subpixel resolution when tracking objects. This problem is constantly in the focus of attention of specialists dealing with coastal video monitoring. Thus, in the work [
19], it is considered in connection with the problem of the most accurate positioning of reference points, used for the georeferencing of video scenes, which must be observed continuously for several years. Under the influence of various factors, these points begin to shift, and it is important to track these changes with pixel accuracy, for example, with the accuracy
, where
is the pixel size in the plane of reference points. Rodriguez-Padilla [
19] describes a simple and effective method based on image subpixel cross-correlation that has improved the accuracy of positioning of the reference points. In principle, almost all approaches are based on specially developed procedures for interpolating source images or video frames into more dense sampling grids. The task is to find such procedures that would minimize a selected quality criterion that is important for a particular field, taking into account additional restrictions. However, it can be assumed that simpler interpolation schemes, such as those used in CCTV cameras Digital Zoom mode, can also produce subpixel resolution when tracking very distant small objects.
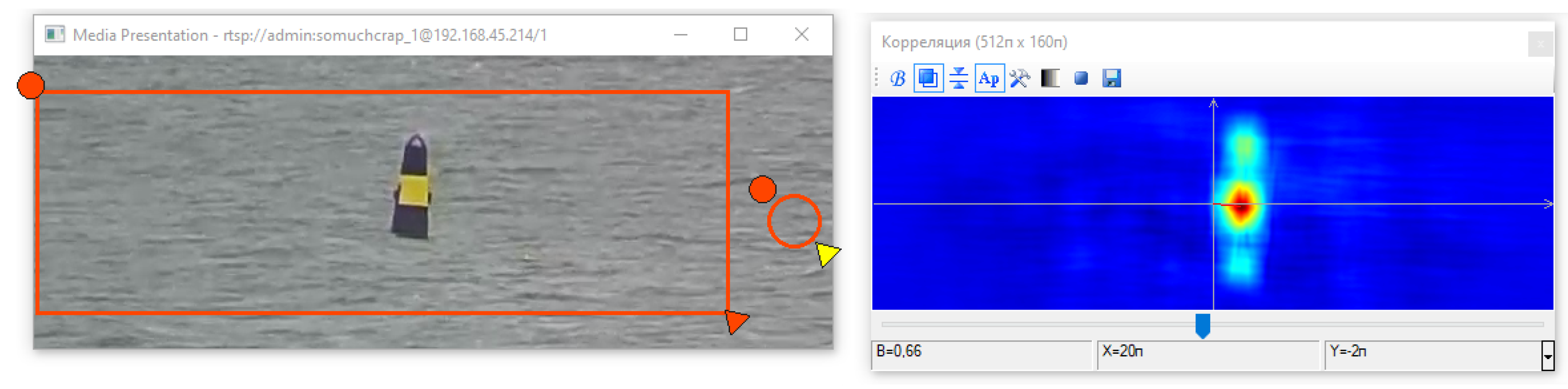
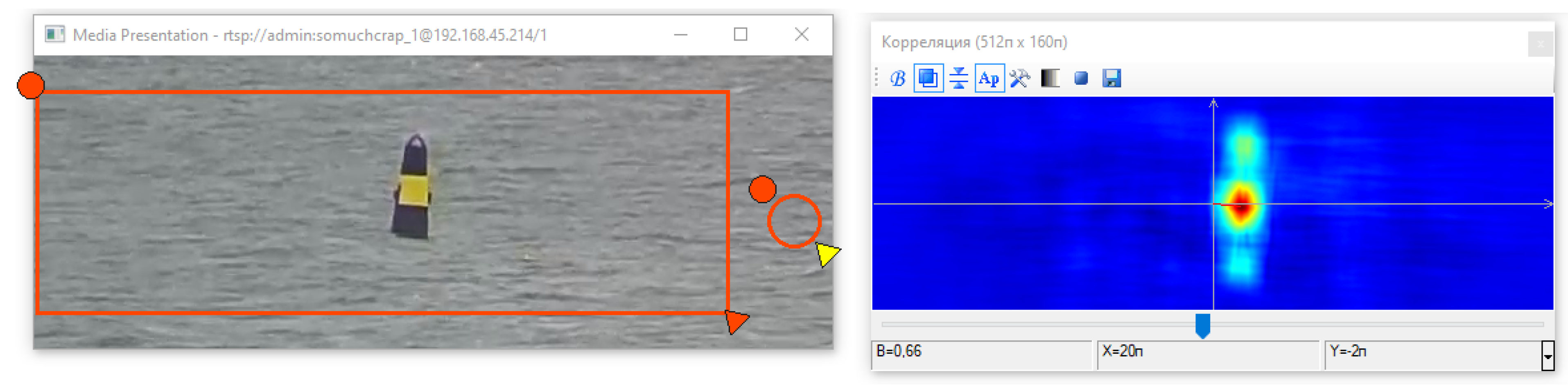
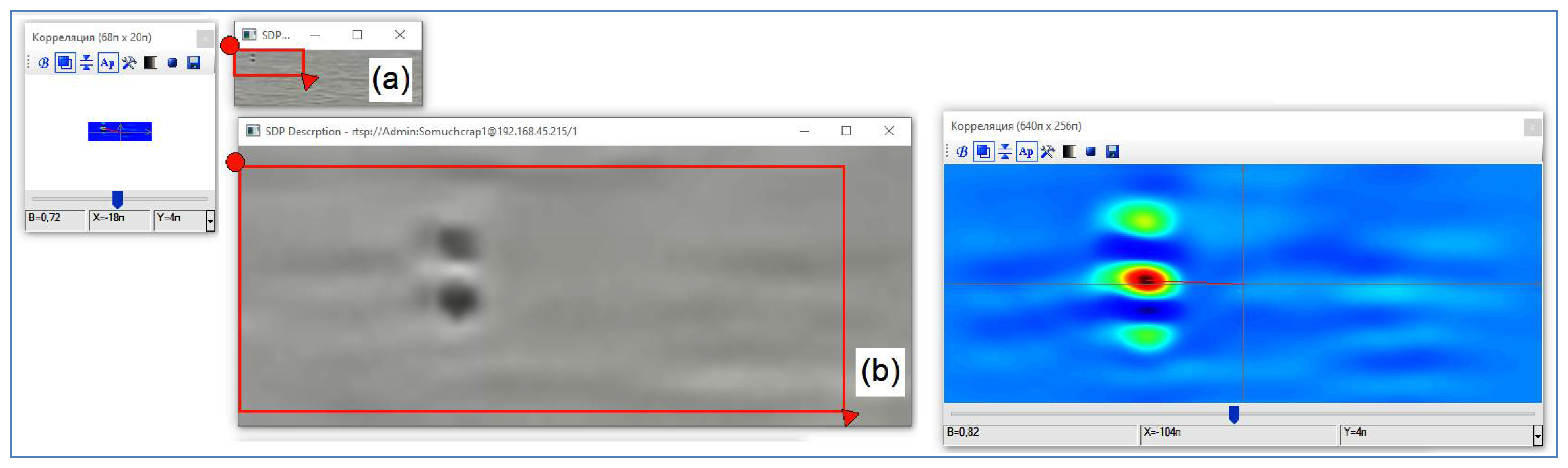
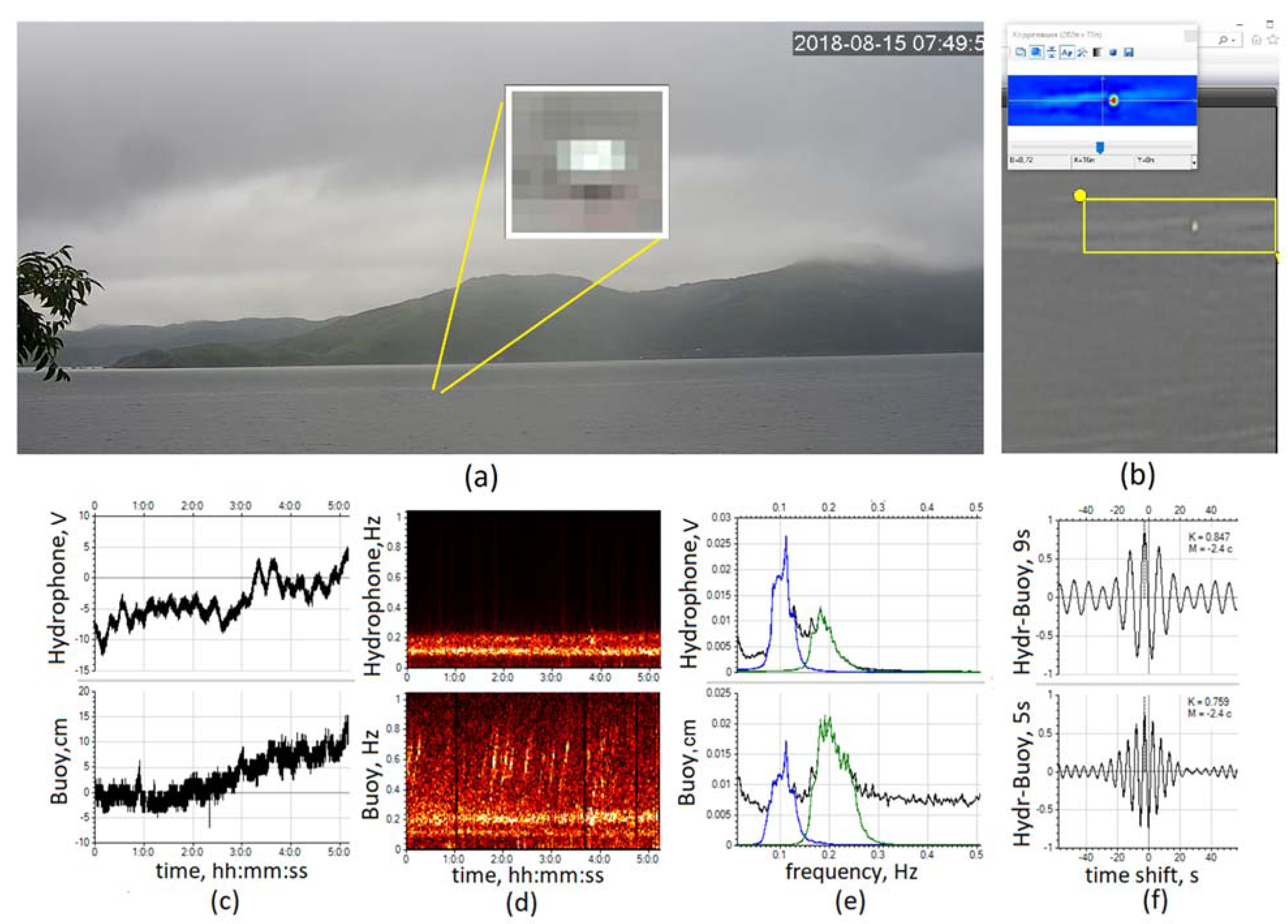
The following study was conducted to evaluate the subpixel resolution capabilities of bicubic interpolation using two PTZ cameras—OMNY 2030-IR and the previously described Hikvision DS-AELW. On 11 June 2021, simultaneously with Hikvision, an OMNY camera located on the roof of the institute streamed a navigational buoy scene with an optical zoom of 2.5×. The buoy looked like a very small object with a size of about 3 × 7 pixels; the height of one pixel in the observation plane of the buoy was approximately 43 cm. The streamings were carried out using the FFplay program simultaneously in two windows, the first—with the original resolution, the second—with 12-fold bicubic interpolation; the total zoom was 2.5 × 12 = 30×.
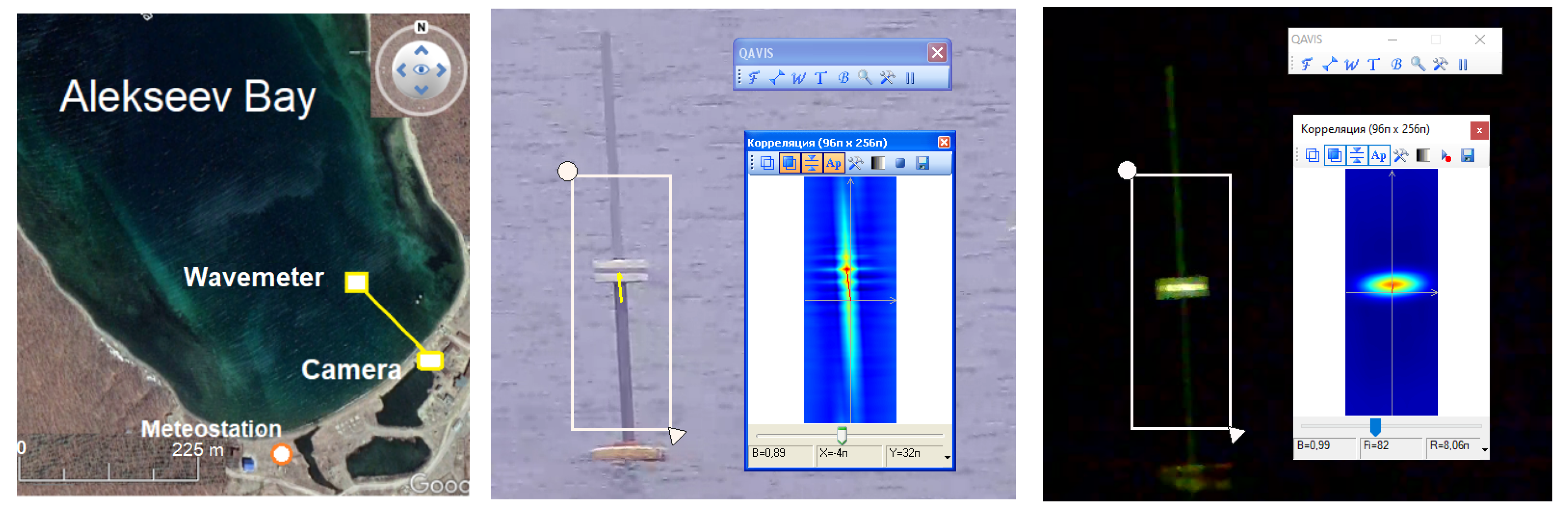
Figure 13 shows the process of measuring the vertical movements of the buoy in both windows.
At the same time, the Hikvision camera streamed with the maximum optical zoom of 30×. The signal of vertical movements of the buoy, measured on it, can be considered the reference signal. The main goal was to find out whether bicubic interpolation leads to an increase in the accuracy of tracking the movements of the buoy, i.e., to the effect of subpixel resolution. Let the names of the received buoy movement signals be associated with the streamings: h1-OMNY (2.5×), h2-OMNY (2.5 × 12 = 30×), h3-Hikvision (30×). All three signals are measured in pixels. Another signal used in the study was the BHN seismic signal, synchronously recorded at Cape Schultz (94 km from the buoy). As mentioned above, the BHN signal is used to monitor the occurrence of swell entering the bay. The BHN signal is presented on integer conventional units (CU). For it convert to actual velocities signal it is necessary to use a scale factor of .
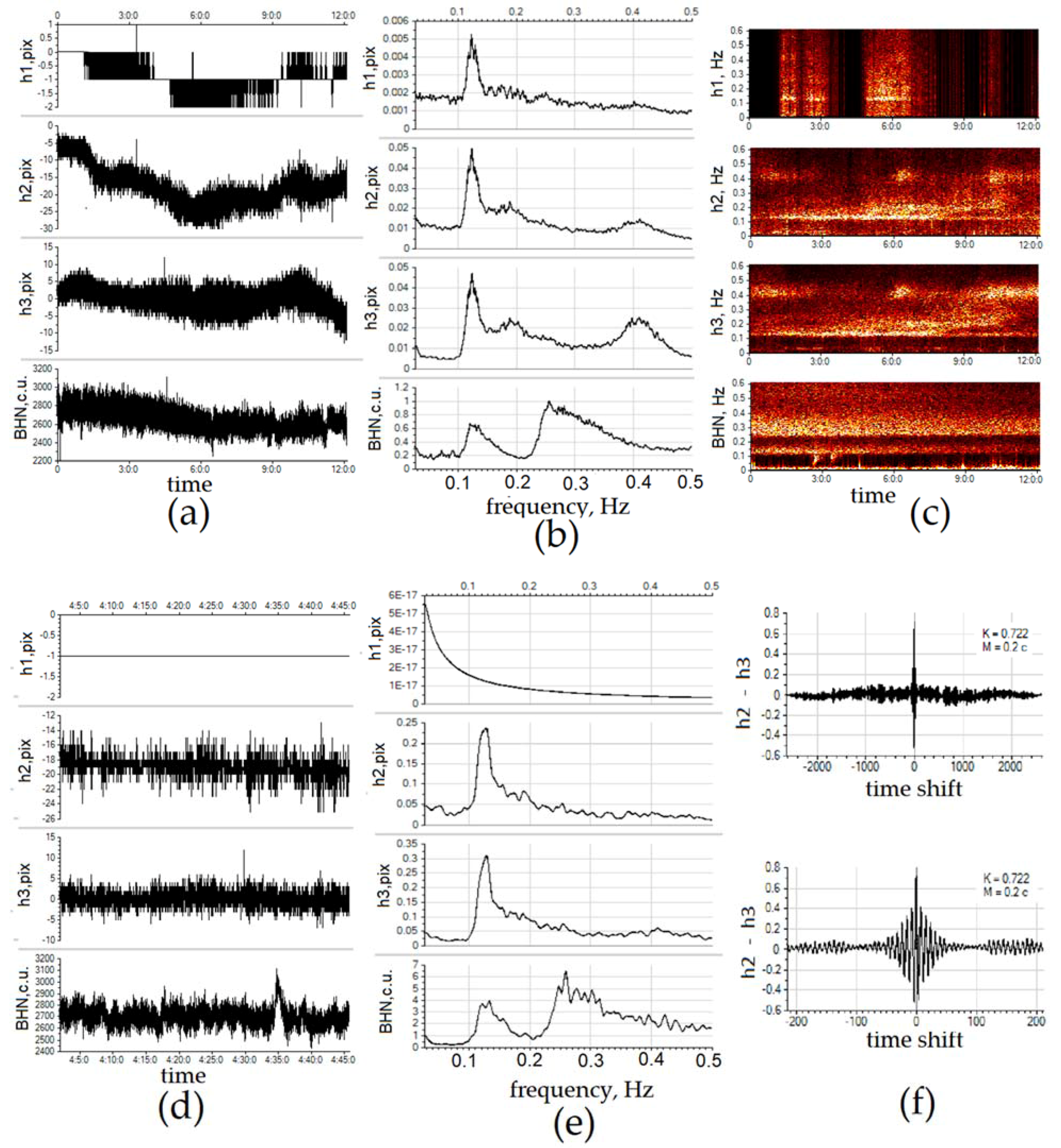
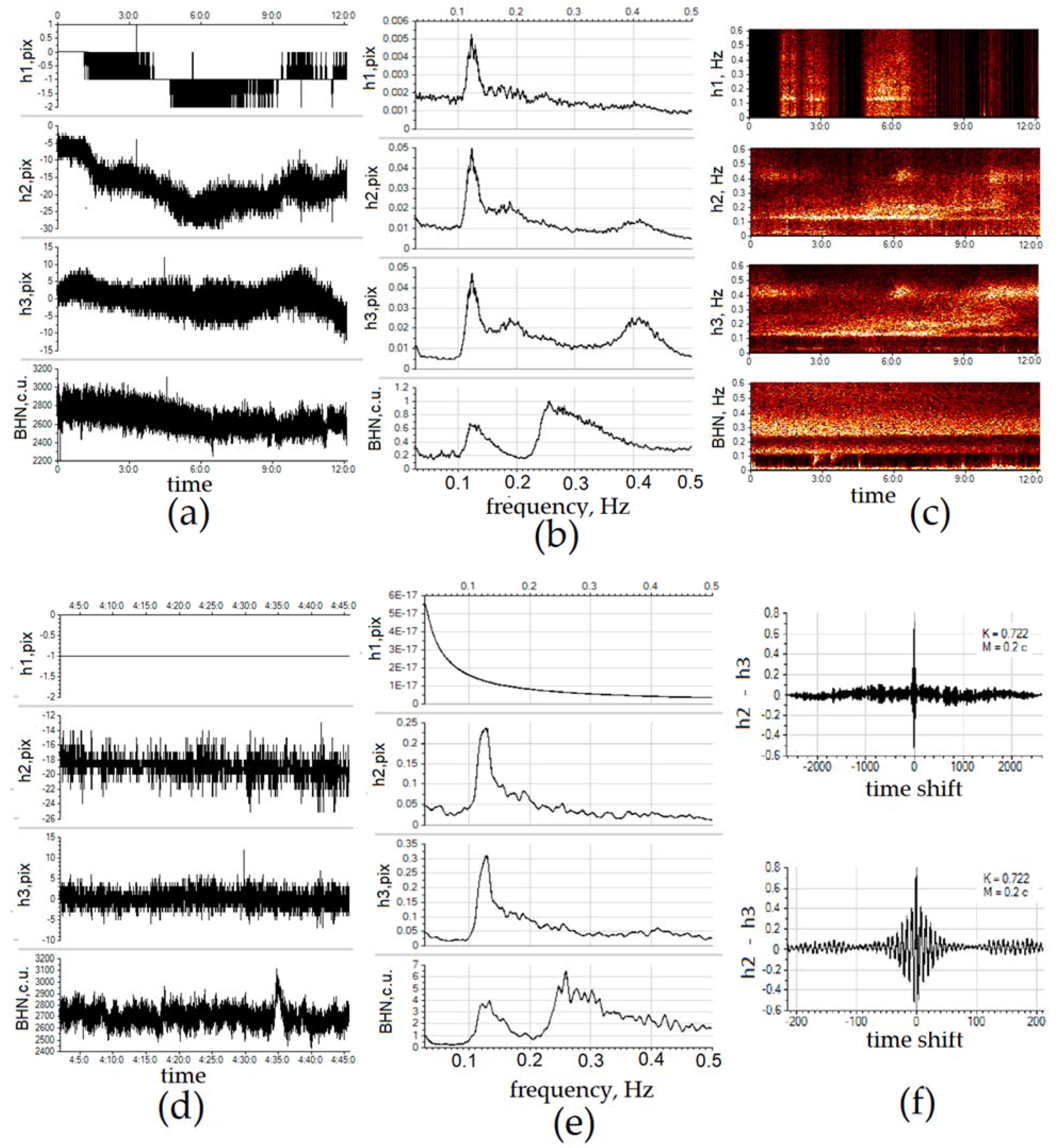
Figure 14 shows the results of the study.
Figure 14a shows the waveforms of 12 h recordings of all channels. The h1 signal does not look much like ordinary signals, as it has only three gradations of the level. There are also long sections of constant zero values. The h2 signal, obtained using bicubic interpolation of the first stream, looks more like a signal with continuous values due to having more gradations of the level. In the spectra of three QAVIS signals h1, h2, h3 (see
Figure 14b), a swell response with a period of about 8 s (0.13 Hz) is noticeable, which is confirmed in the spectrum of the BHN seismic signal. In the spectra of the interpolated and reference signals, h2 and h3, more wave systems with periods of 5.4 s (0.18 Hz) and 2.5 s (0.4 Hz) are synchronously manifested. The analysis of the spectrograms in
Figure 14c further confirms the positive effect of bicubic interpolation use. The spectrogram of the non-interpolated signal h1 contains only two small sections with swell responses. The h2 spectrogram conveys the temporal dynamics of wave systems almost as well as the spectrogram of the reference signal h3.
Figure 14d–f considers the unique case when there are no changes at all in the h1 signal for 44 min; the buoy does not shift by a single pixel in the field of view of the OMNY camera. At the same time, the movements of the buoy are recorded in the interpolated h2 signal; there is a peak in their spectrum at the swell frequency, the same as in the h3 and BHN spectra. In addition, the h2 signal is significantly correlated with the reference signal h3 (see
Figure 14f).
Thus, a simple bicubic interpolation of a video fragment with a tracked marker can significantly improve the quality of tracking. Video streaming programs usually support the bicubic interpolation operation; many, IP cameras support the Digital Zoom with bicubic interpolation. This is important for the QAVIS-technology, since it will be possible to measure wave processes at significantly large distances in real time.
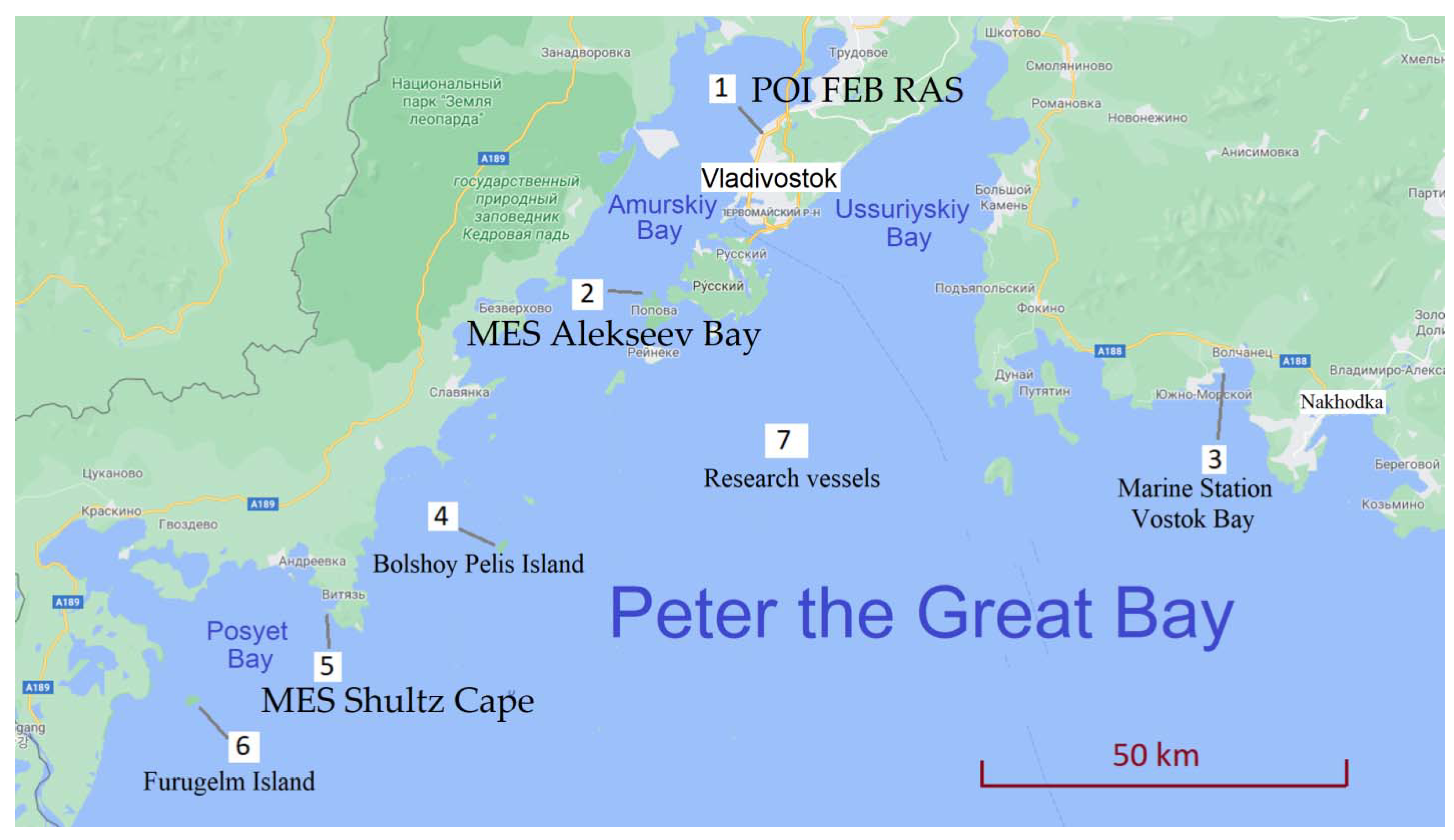
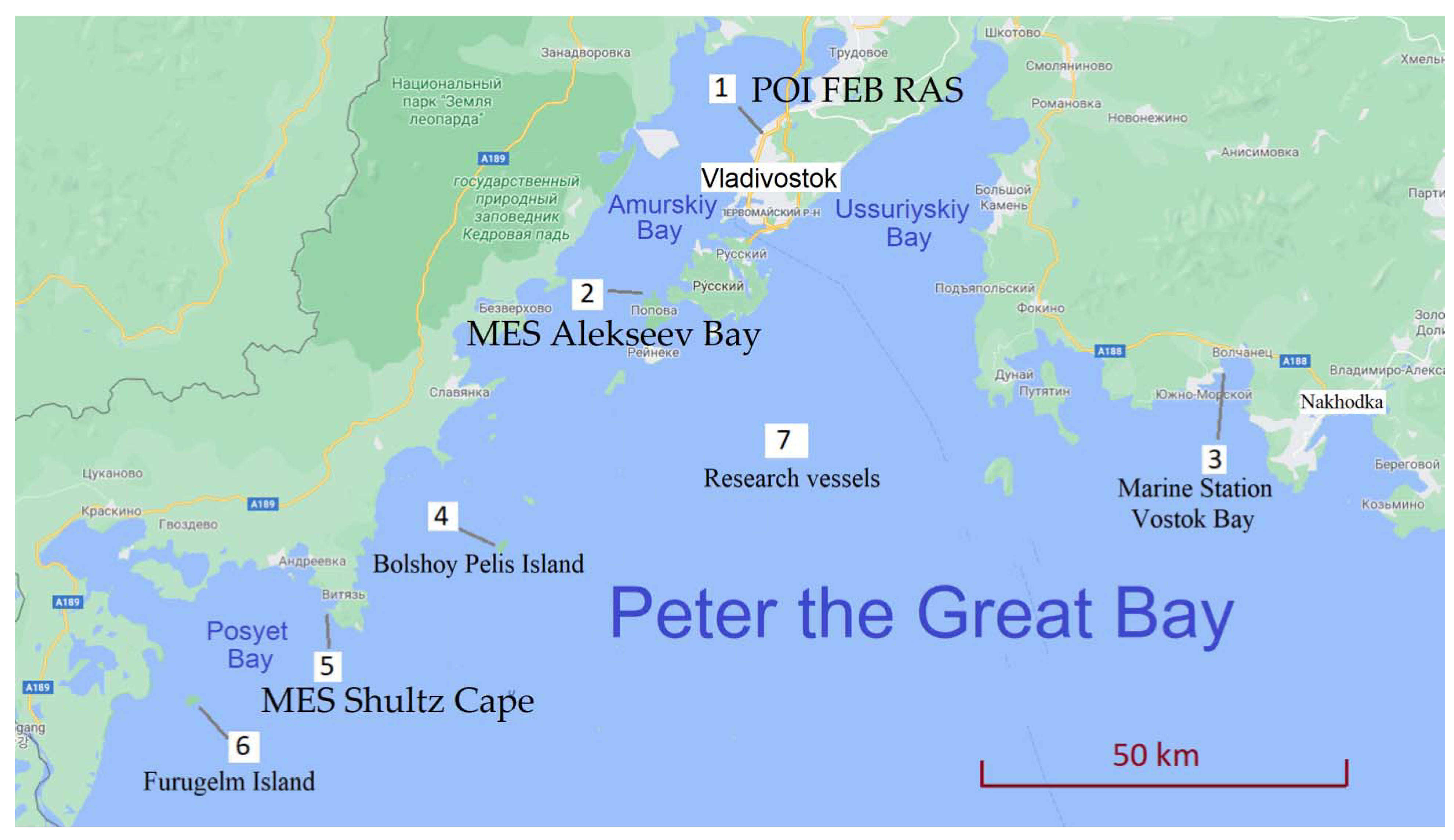
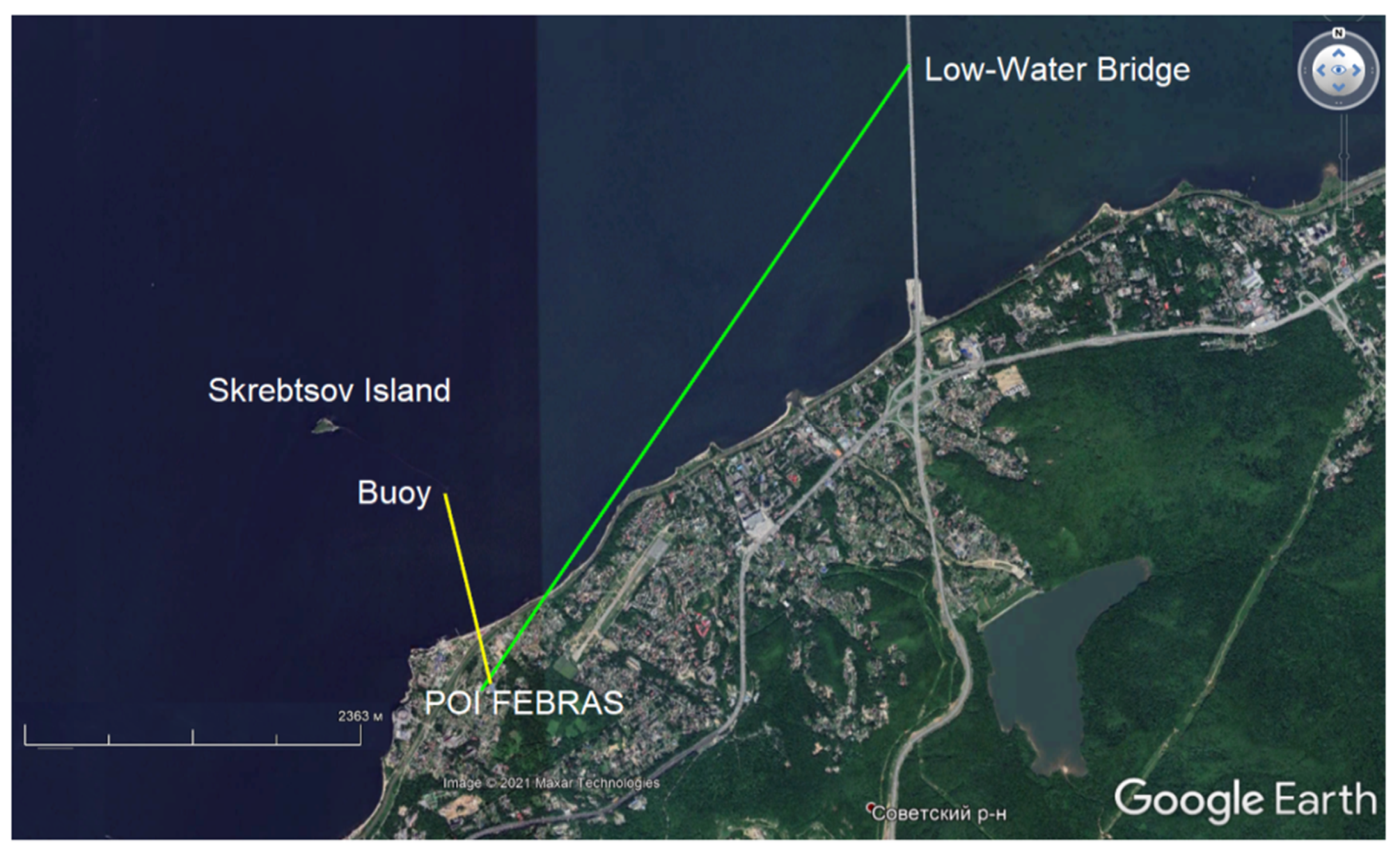
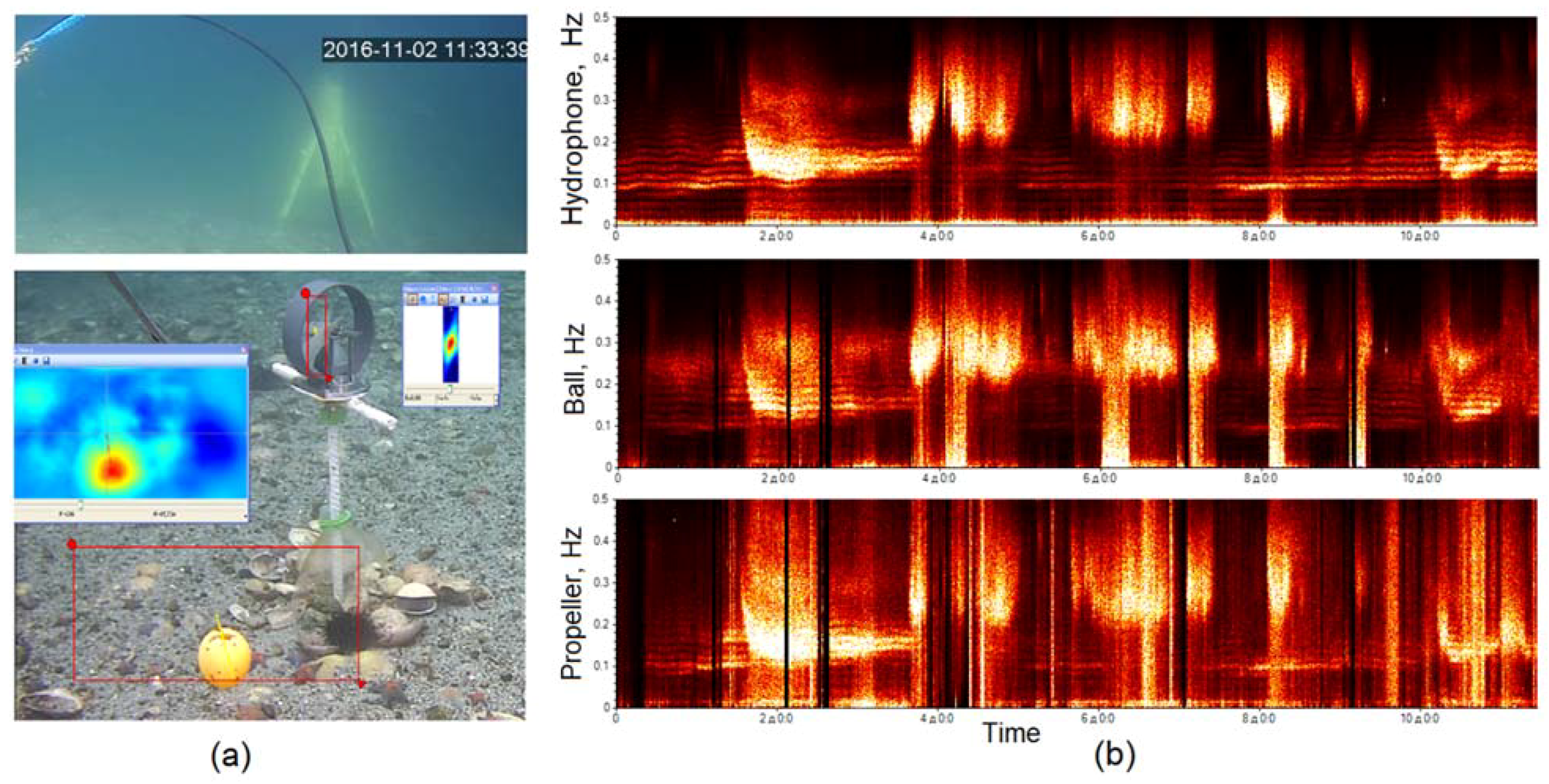
Let us return to the problem of studying the capabilities of the program for evaluating wave signals at ultra-long distances. In
Figure 9, the green segment indicates the route from the OMNY PTZ camera on the roof of the POI FEB RAS building to the central spans of the low-water bridge over Amurskiy Bay (distance 5.4 km) (
https://eng.gpsm.ru/activities/low-water-bridge-vladivostok/, accessed on 25 September 2021). From the autumn of 2020 to the present, several observation cycles have been performed to develop QAVIS-methods for estimating the parameters of sea processes at such large distances.
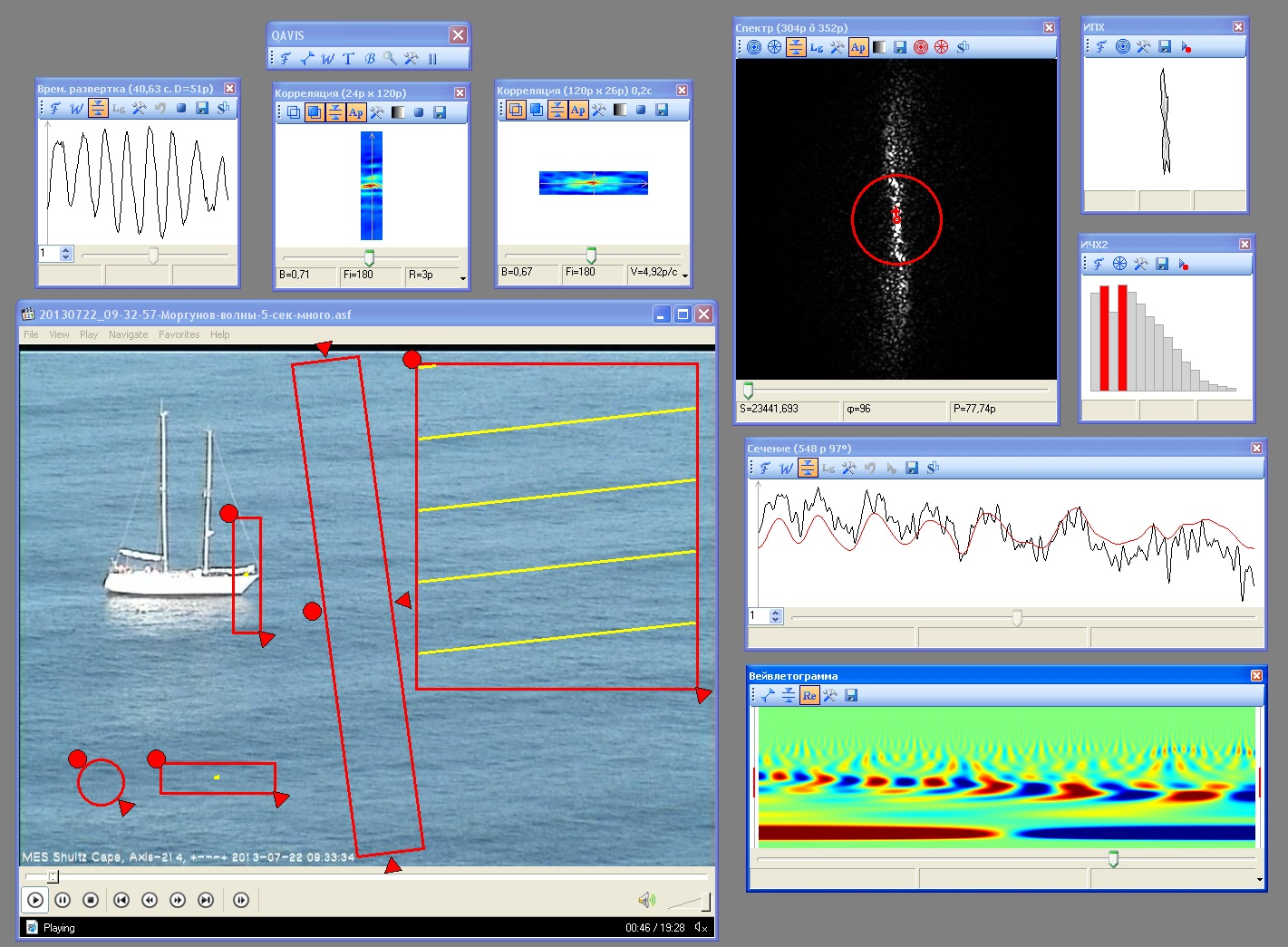
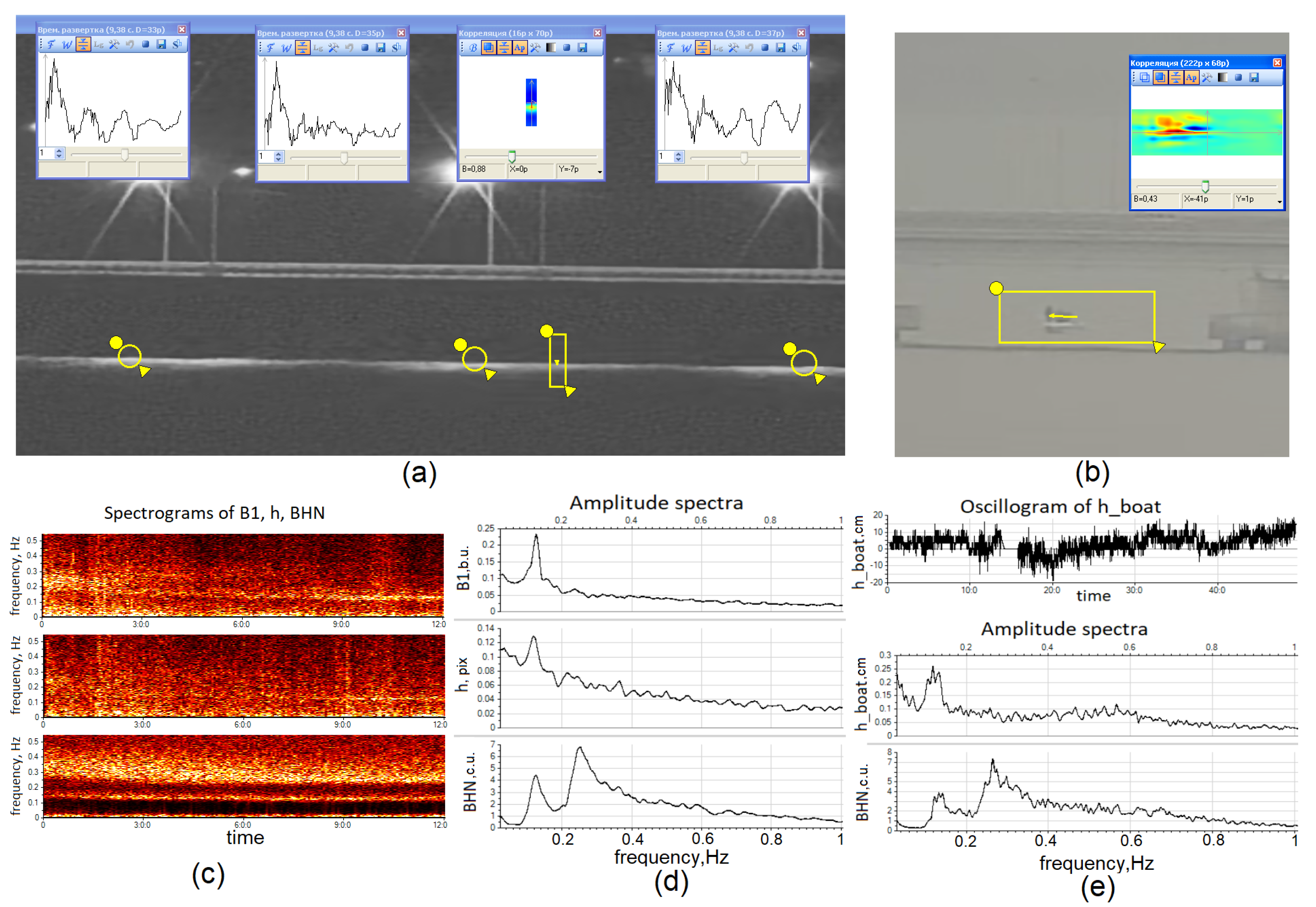
Figure 15 shows the results of one of these studies.
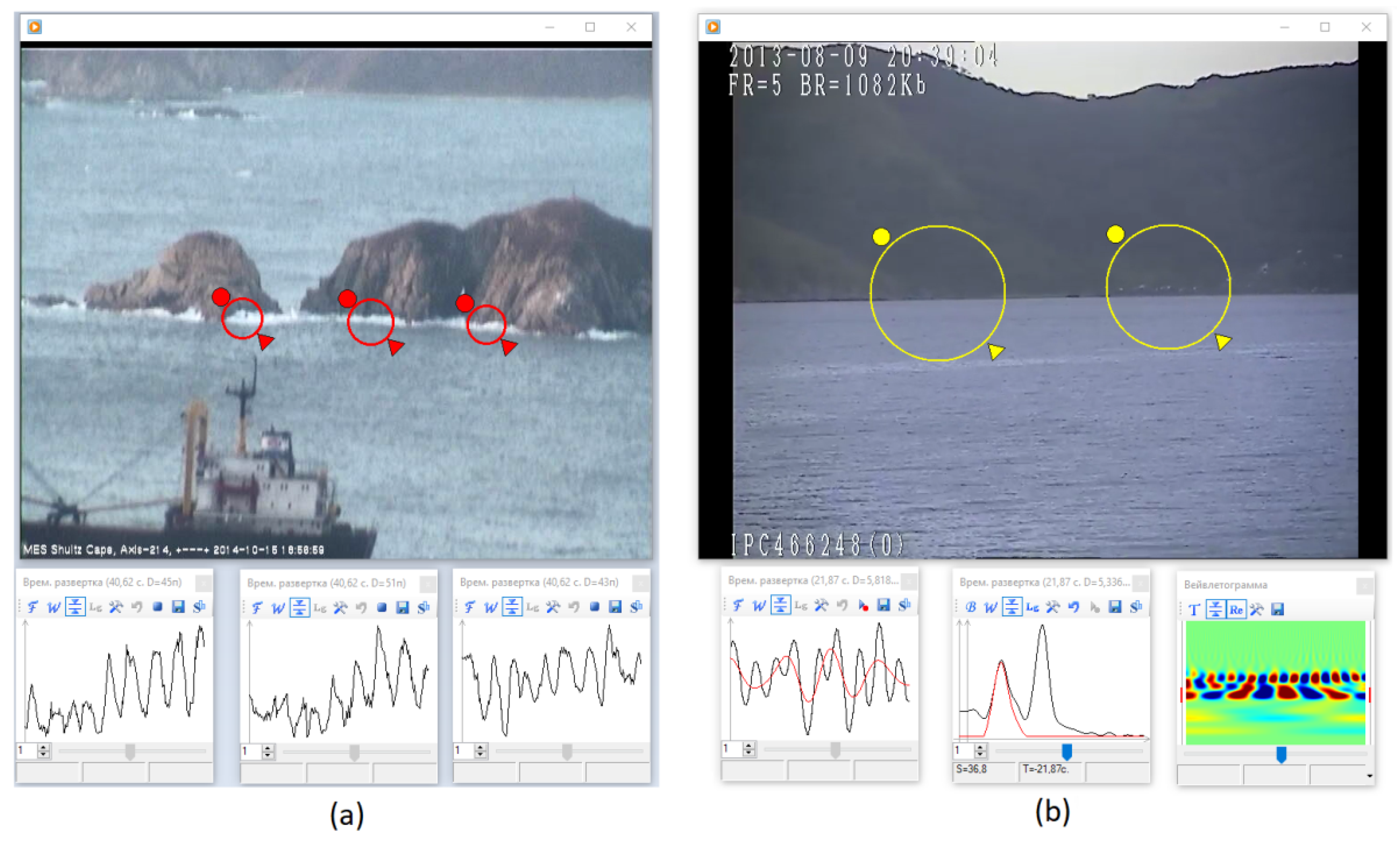
Figure 15a demonstrates the process of measuring fluctuations in the water of light spots from the bridge lights with instruments Brightness and Correlation. The measurements were carried out for 12 h during nighttime from 31 October to 1 November 2020.
Figure 15c shows the spectrograms of signals B1 (brightness tool, left selector, measured in brightness units (b.u.) in the range from 0 to 255), h (correlation tool measured the vertical displacements in pixels of a strip of light on the water surface), BHN (a seismic signal, synchronously recorded at Cape Schultz, 98 km from the bridge). In the spectrograms of the “optical signals” near the end of the recording, light horizontal stripes are visible at a frequency of about 0.12 Hz. The same band is reproduced more clearly in the spectrogram of the BHN signal. Such frequency bands are characteristic of swell waves. In the spectra (
Figure 15d) of 1-h fragments, the peaks corresponding to the swell periodicity of 8.3 s (frequency 0.12 Hz) are synchronously present for all three signals. Thus, the techniques of night measurements at very long distances tested in this example may well be applied to detect swell waves and describe their frequency properties.
Figure 15b,e demonstrates another small experiment, typical of the QAVIS technology. On the same day, 1 November, a fishing boat was accidentally discovered in one of the bridge spans on the main video broadcasts. In order not to overload the processing with a large number of measuring instruments, another video stream was launched on another computer; QAVIS was called to measure the movement of the boat bobbing on the waves (
Figure 15b). Before the sailors left the camera’s field of view, it was possible to record a 49-min signal of the vertical movements of the boat h_boat.
Figure 15e shows the waveform of the h_boat signal, its spectrum, and the spectrum of the BHN seismic signal at Cape Schultz. The spectra show synchronously low-frequency peaks of the same swell near 8.3 s. Taking into account the known height of the low-water bridge, the scale factor K = 3.66 cm/pix was calculated and applied. Then, the swell component was isolated using a bandpass filter, and its significant wave height SWH = 7.1 cm was estimated.
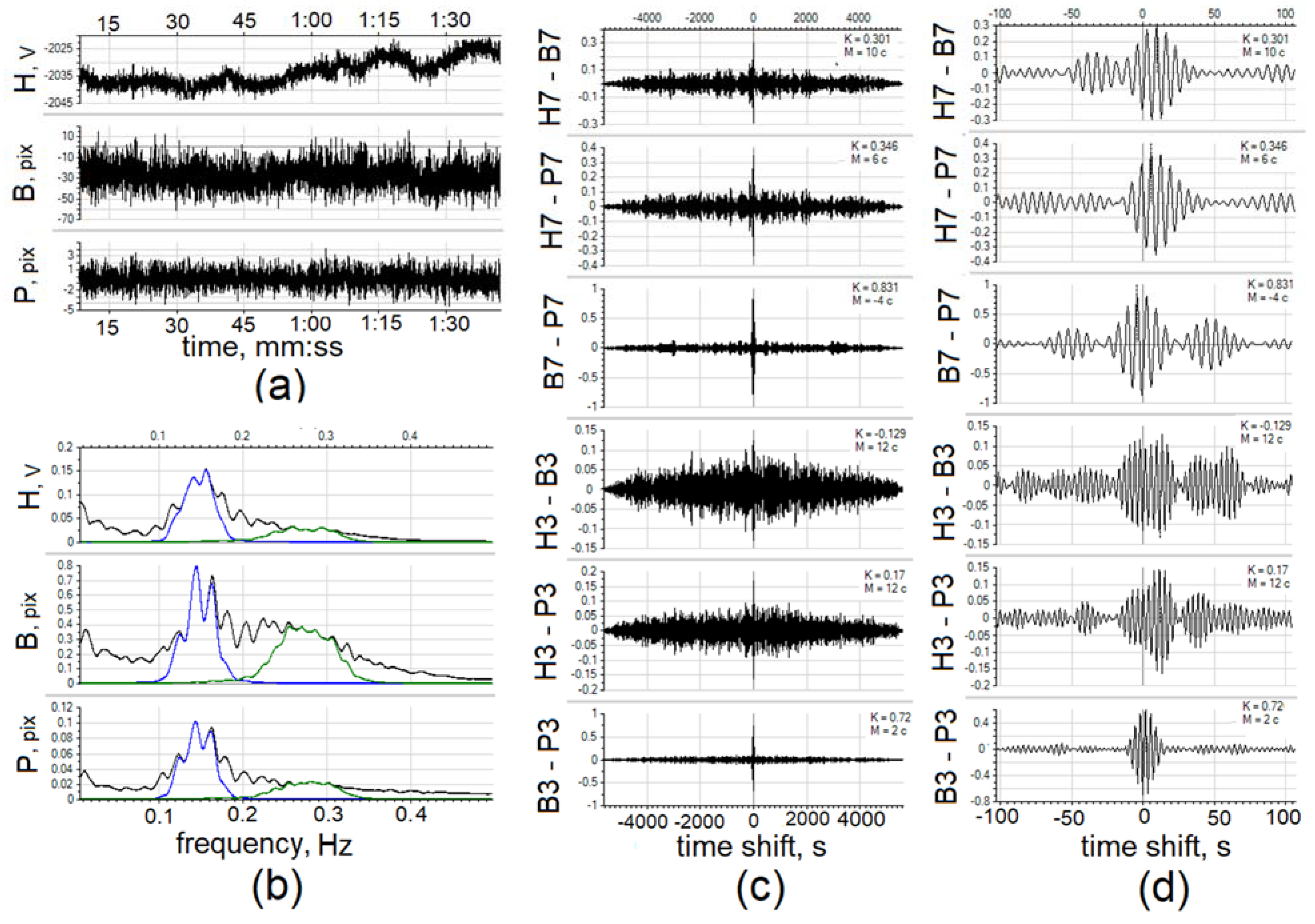
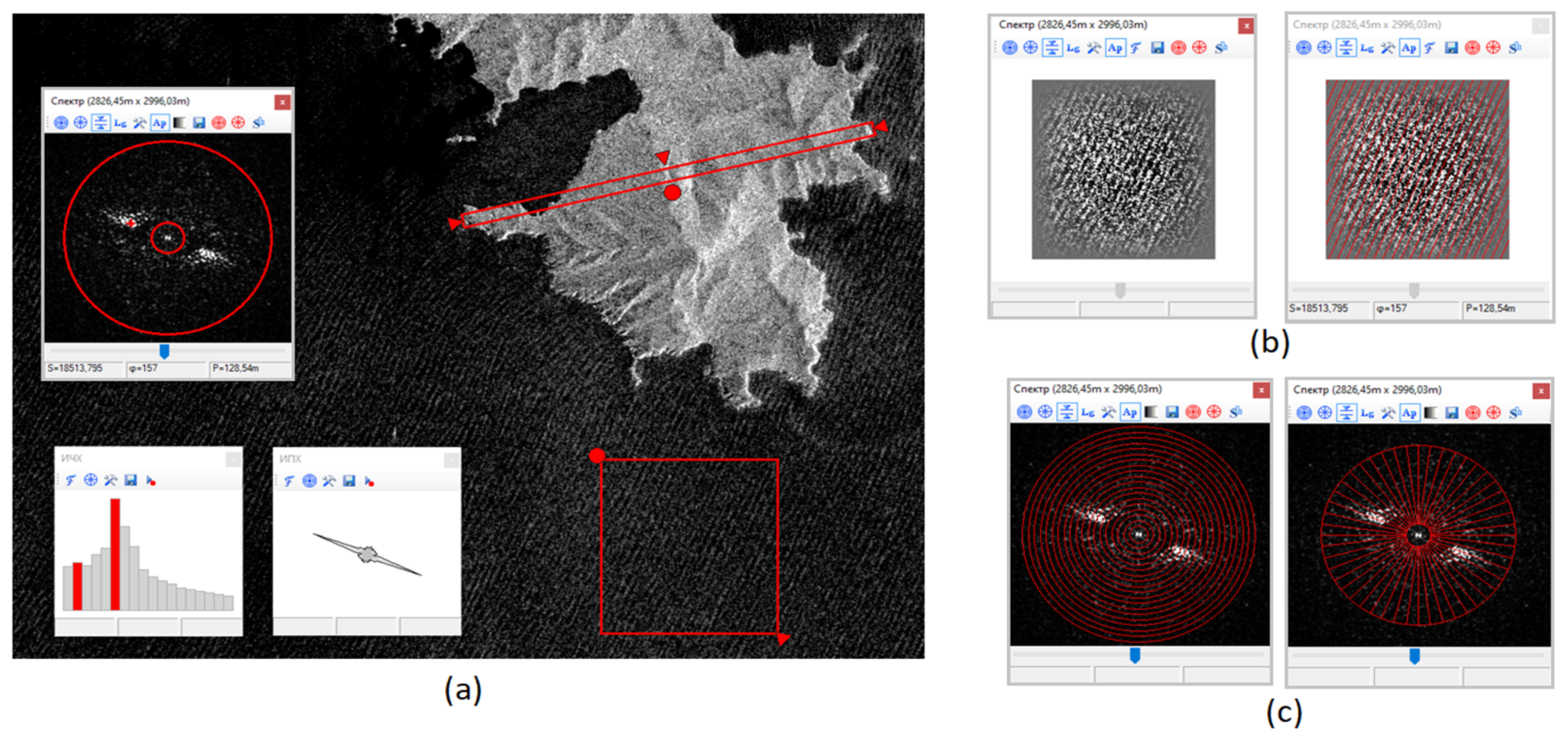
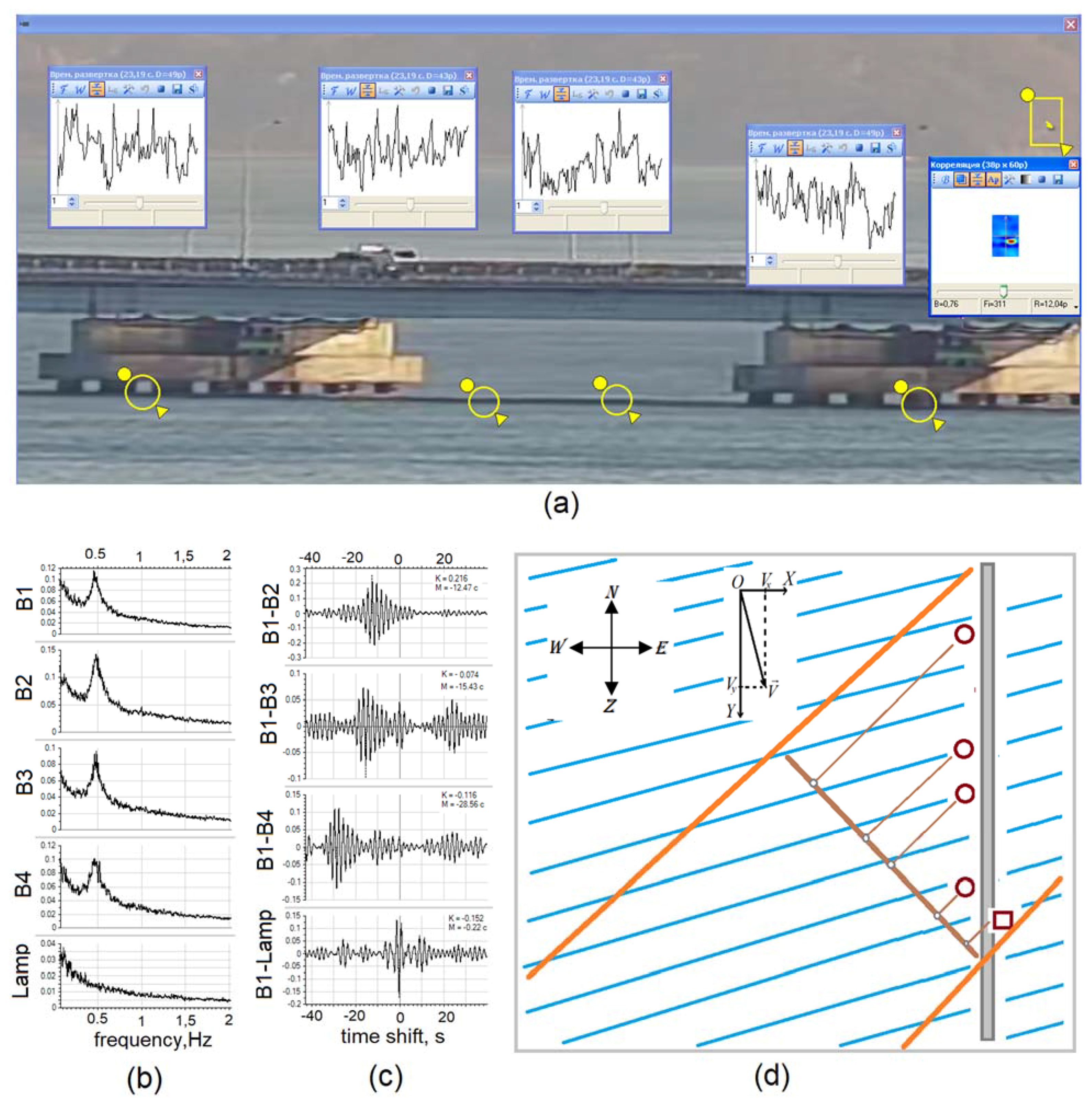
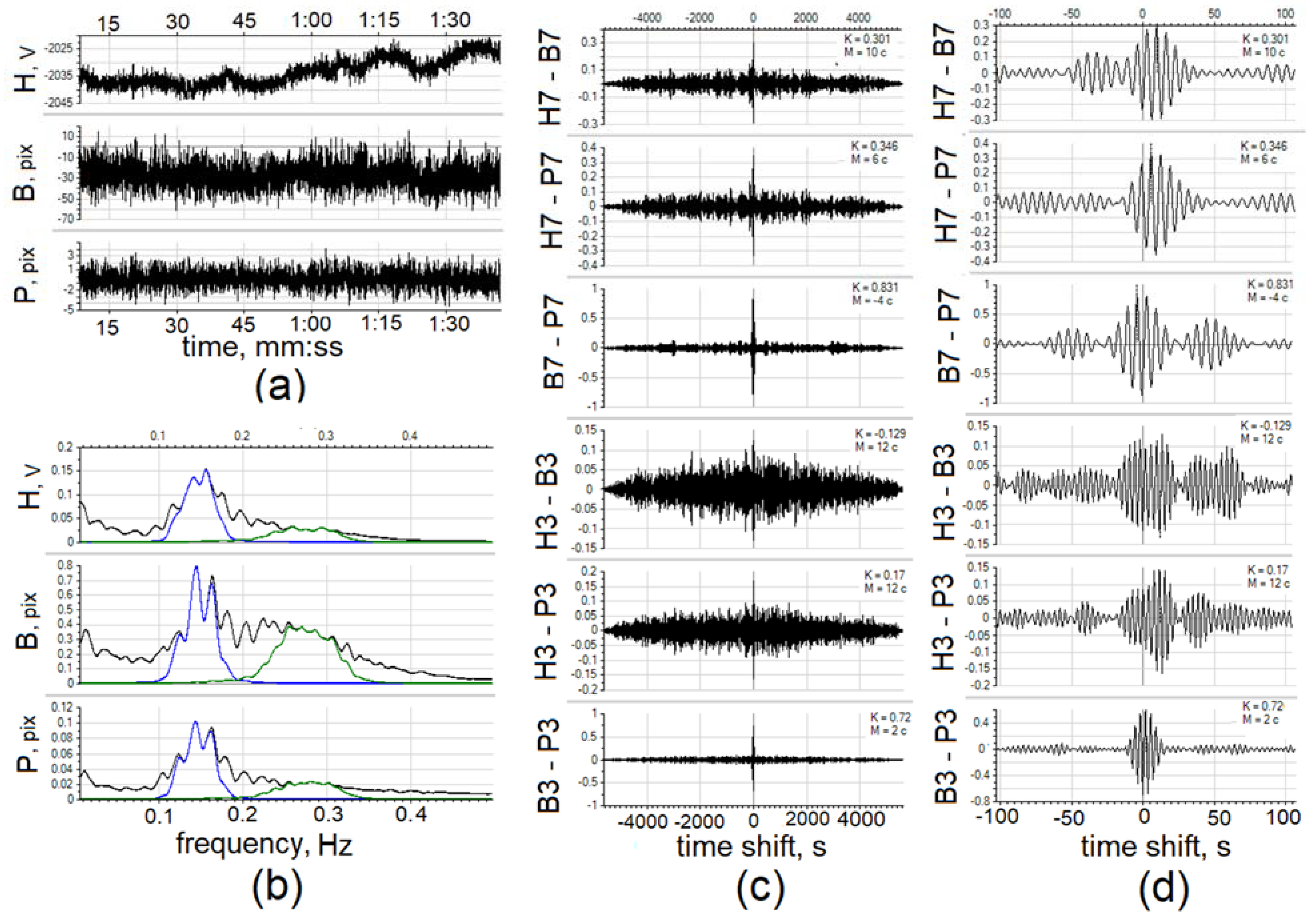
Figure 16 shows the results of observations near the low-water bridge on the night of 14–15 October 2020, in which wind waves with a period of 2.1 s were detected and described.
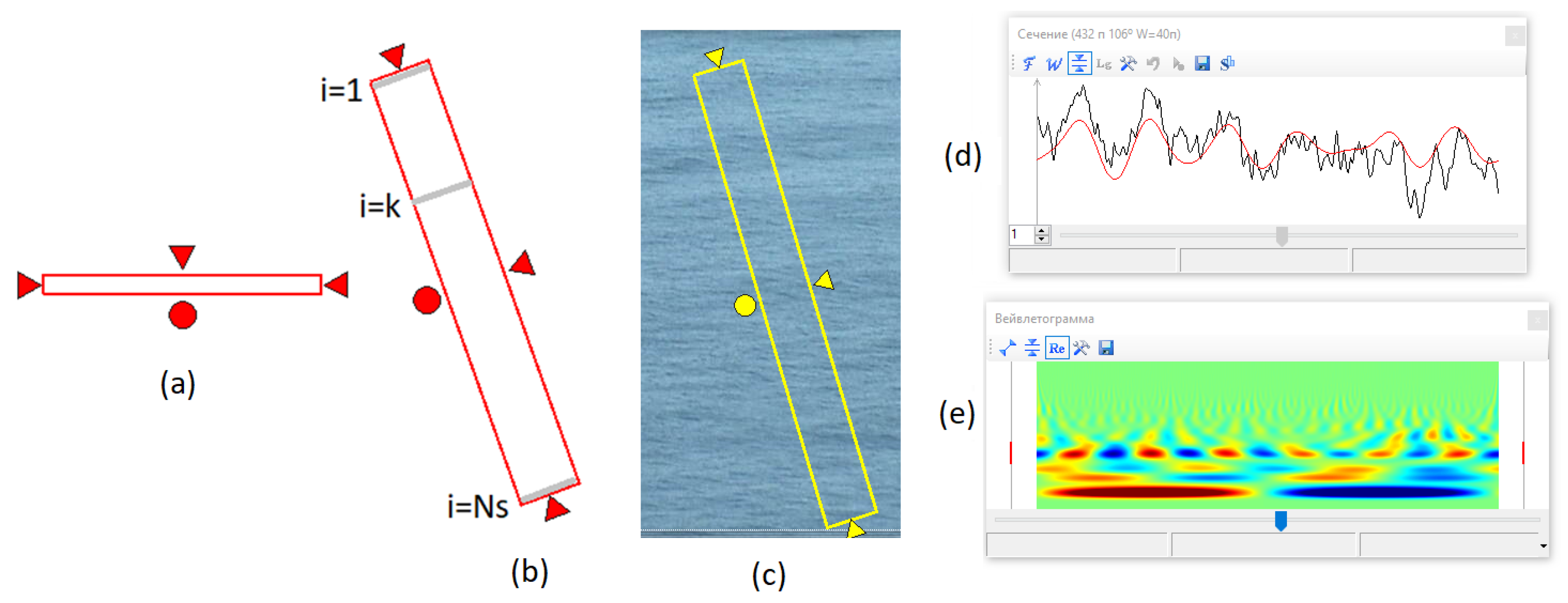
Figure 16a shows the measurement tools set-up that was used in nighttime measurements. Four round selectors of the brightness instrument measured the signals of fluctuations in the brightness of light spots on the water at night: B1, B2, B3, B4. The correlation tool (rectangular selector at the top right) measured the movement of a street lamp on a bridge.
Figure 16b shows the Fourier spectra of two-hour signal records. In the spectra of all brightness signals, a peak corresponding to a period of 2.1 s is noticeable. There is no such peak in the movement of the street lamp signal.
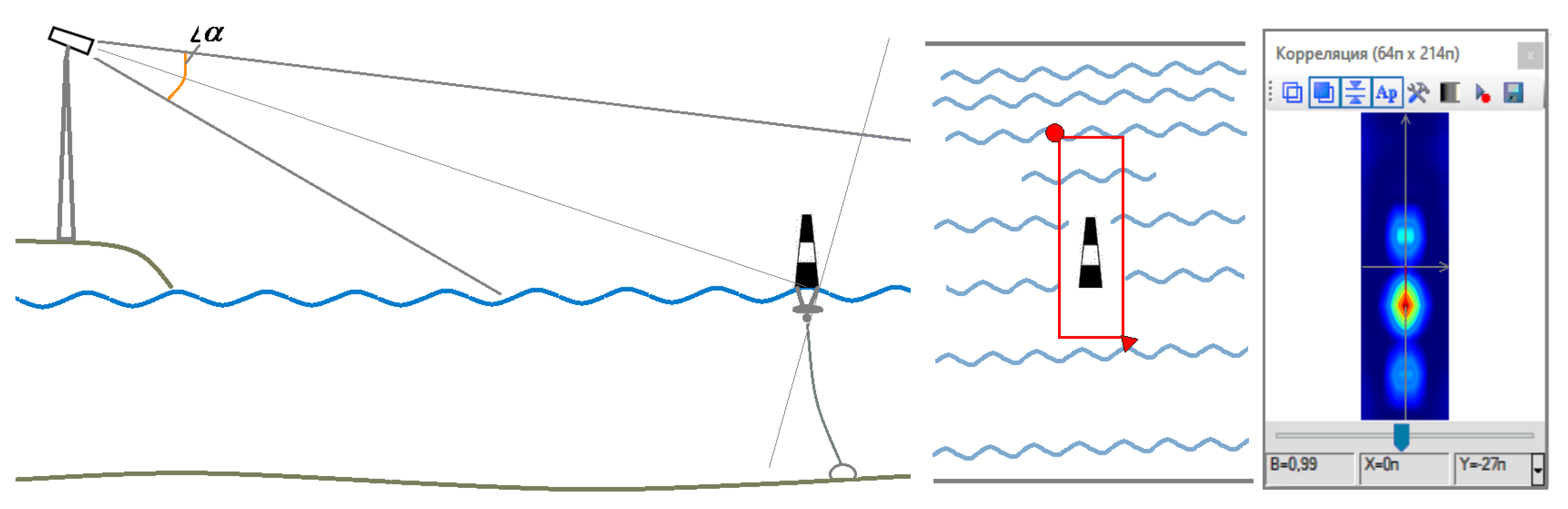
Then, the components of wind waves were extracted from all signals using a band-pass filter (the bandwidth is 0.4–0.6 Hz). Then, the correlation functions were calculated between the signal component B1 and the components of the remaining signals. In all correlation functions, the peaks of the correlation maxima were visually noticeable (see
Figure 16c). In this case, the values of the maxima themselves were not large, from 0.08 to 0.23. It is noticeable on the graphs how the correlation maxima of the brightness signals successively move away from the point of zero shift with an increase in the distance between the measuring instruments. The values of time shifts between signals, determined by the program automatically according to the position of the maximum of the correlation module, were as follows: M12 = −12.47 s, M13 = −15.43 s, M14 = −28.56 s. The negative sign of the time delay means that the first signal is ahead of the second. The sequence of delays is logical if we take into account the uneven installation of the meters in
Figure 16a.
A possible scenario for nighttime observations is presented on the schematic map shown in
Figure 16d. The map shows the location of the bridge (gray vertical bar on the right), location of measuring instruments (brown circles) along the bridge, and conditional lines coming from the camera, limiting the field of observation of the scene to the left and right in
Figure 16a, observation plane (brown line), orthogonal to the optical axis of the camera, the projection of the positions of the measuring instruments on the observation plane. The top left shows the wind rose. The direction of the bridge, and hence the line of placement of the meters along it, are oriented almost exactly along the “North-South” direction. This fact can be checked from
Figure 9 and in the Google Earth service. The blue lines schematically represent wind waves moving from the direction of North-North-West. Usually, in October, north-westerly winds prevail over the Amur Bay. They could well have caused the wind waves shown in the diagram. The diagram also shows the velocity vector of the waves; its vertical component Vy can be estimated taking into account the known technical information about the dimensions of the bridge elements (
https://eng.gpsm.ru/activities/low-water-bridge-vladivostok/, accessed on 25 September 2021). The distance D between the bridge supports is 63 m.
Figure 16a shows that the distance between gauges 1 and 4 is slightly larger, D14 = 70 m. Thus, the projection of the wind waves velocity along the bridge can be estimated Vy = D14/M14 = 2.45 m/s.
The correlation between B1 and Lamp signals should be discussed. The correlation maximum is significant; it noticeably exceeds the average level of the surrounding correlations (see
Figure 16c) but is reached at a very small time shift of 0.22 s, almost zero. When the distance between the meters is more than 70 m, the correlation with zero delay cannot be due to marine processes. The most likely cause is camera shake, which appears synchronously in the signals of all meters and therefore contributes to the correlation functions at zero time delay. With a strong jitter, situations are possible when the correlation of jitter components will exceed the correlation of real physical signals recorded by the meters. This can cause difficulties, and even errors, in the interpretation of observation results. In the previously considered case with the registration of swell waves near the bridge, significant peaks in the cross-correlation functions were observed for almost all pairs of signals. But only for two pairs of signals from closely spaced meters, these peaks were achieved with a nonzero delay. Apparently, at large distances, the correlation of real processes weakens, and the correlation of the jitter components begins to prevail.
Thus, in this section, it was shown that using QAVIS measuring techniques and OMNY 2030-IR class IP cameras, it is possible to detect swell and wind wave systems, and also to describe their frequency properties at distances of up to 5 km from a camera.
Strictly speaking, for wind waves, this statement is not supported by alternative field measurements. The seismic station at Cape Schultz does not register responses of wind waves in water areas remote from the Cape. The spectra and spectrograms of the buoy movement signal (
Figure 14) contain powerful components in the range of 0.3–0.5 Hz, which usually reflect wind waves. However, the natural vibrations of the buoy structure may be manifested in the same frequency range. Therefore, it is advisable to conduct additional research using wave meters located next to the buoy. The fact of registration of wind waves near the low-water bridge (
Figure 14) looks very reasonable. The data of all four wave meters are consistent with each other and satisfy one of the most realistic scenarios of the wave process for this part of Amur Bay. But even in this case, there were no data from alternative measuring systems.



 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}