
Hydrodynamic Sensitivity of Moored and Articulated Multibody Offshore Structures in Waves




Abstract
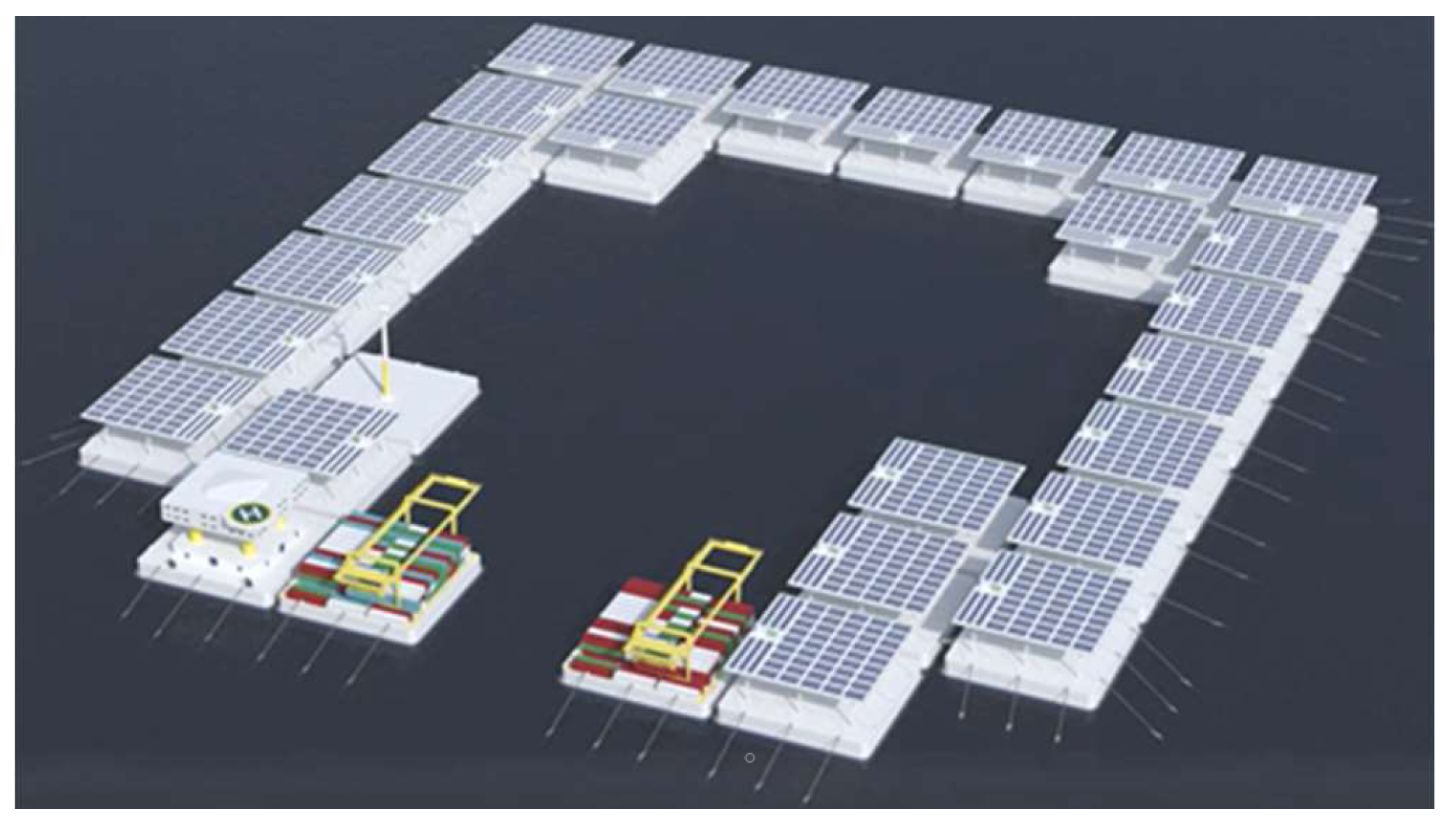
:1. Introduction
2. Numerical Approach
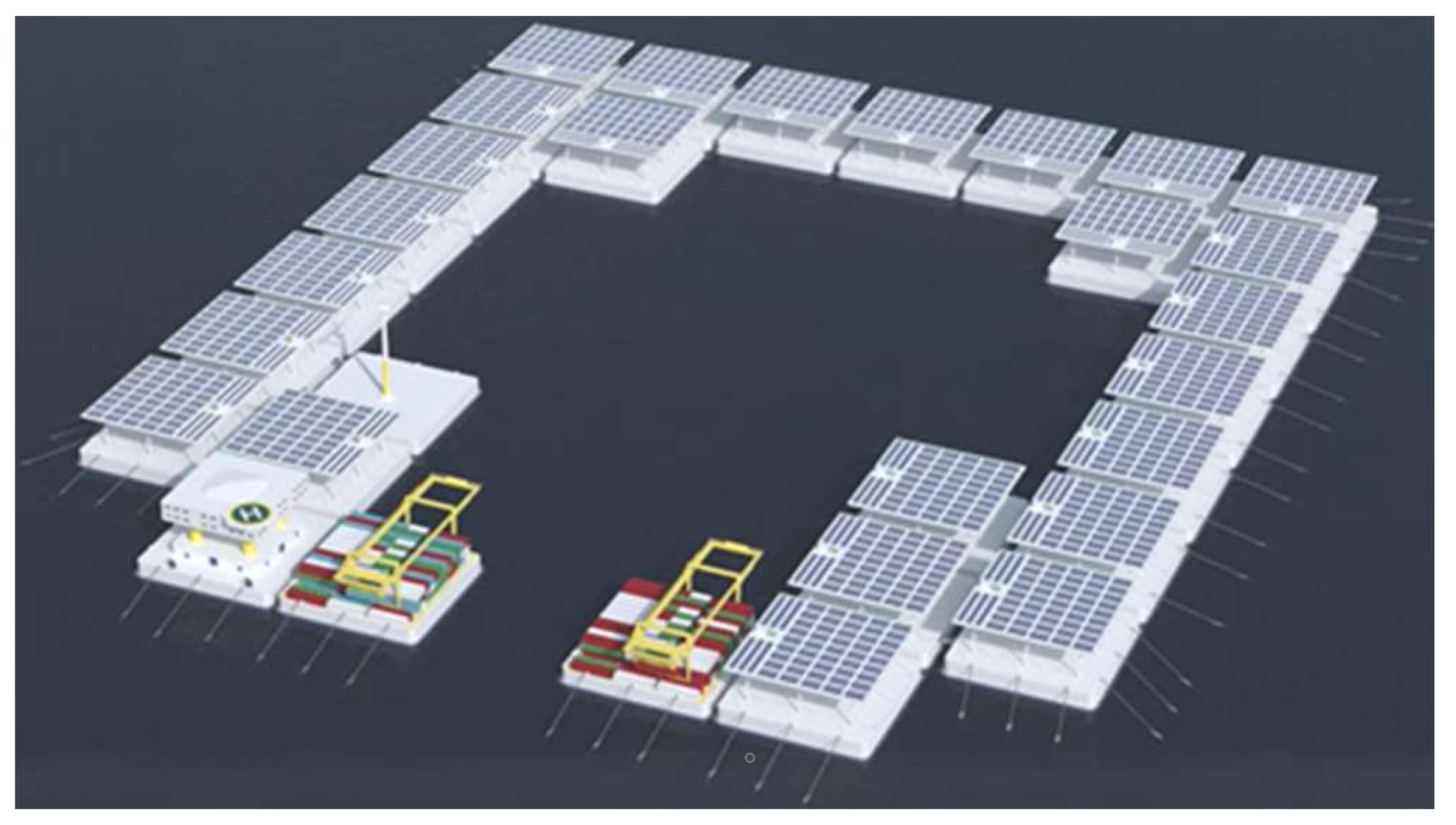
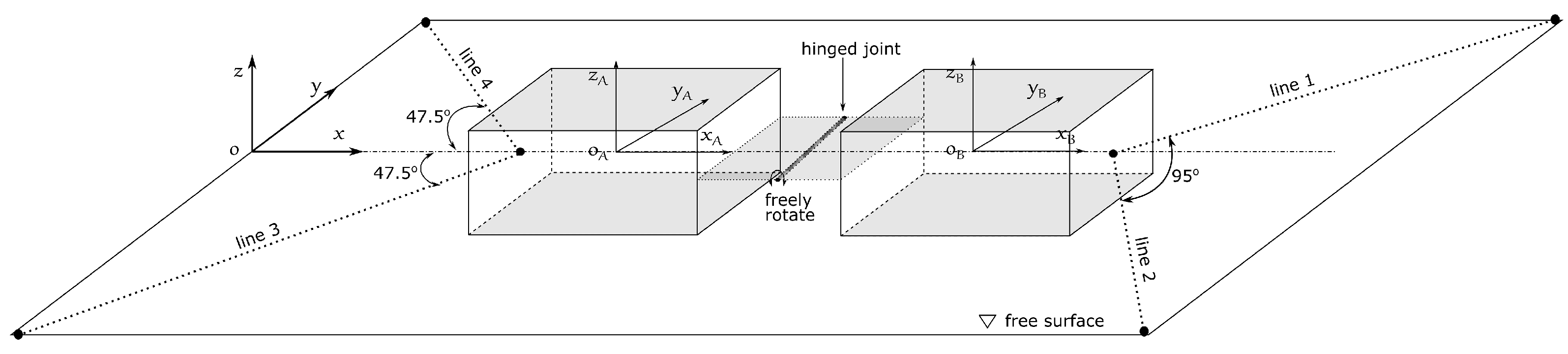
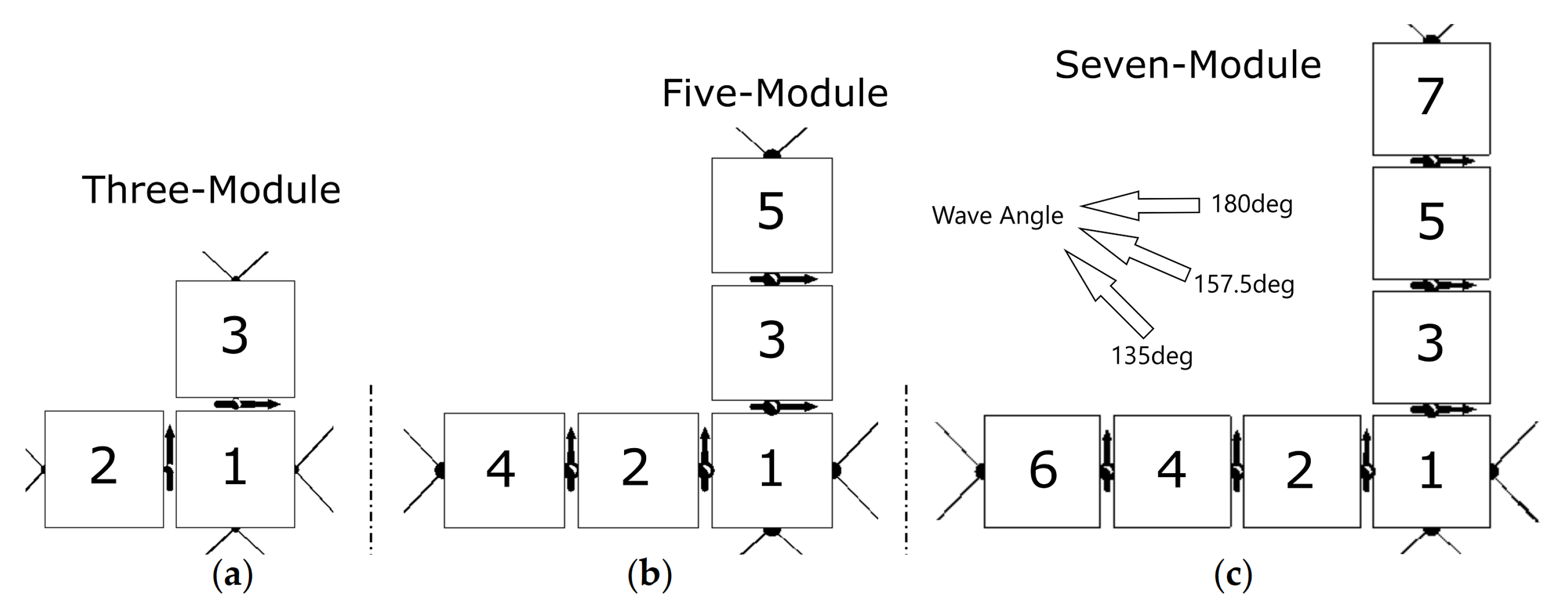
3. Test Case Description
4. Results
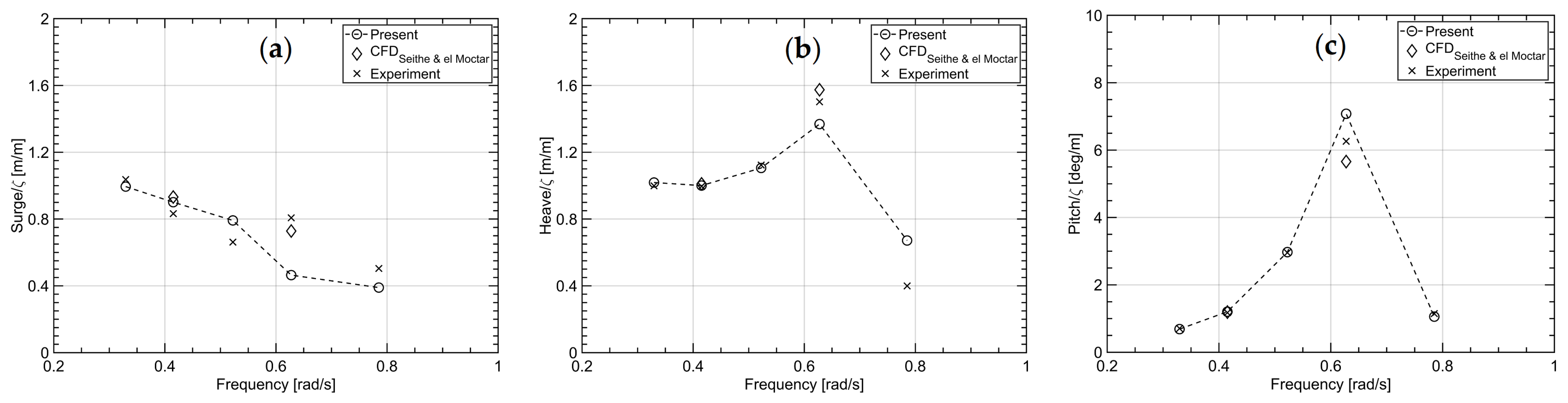
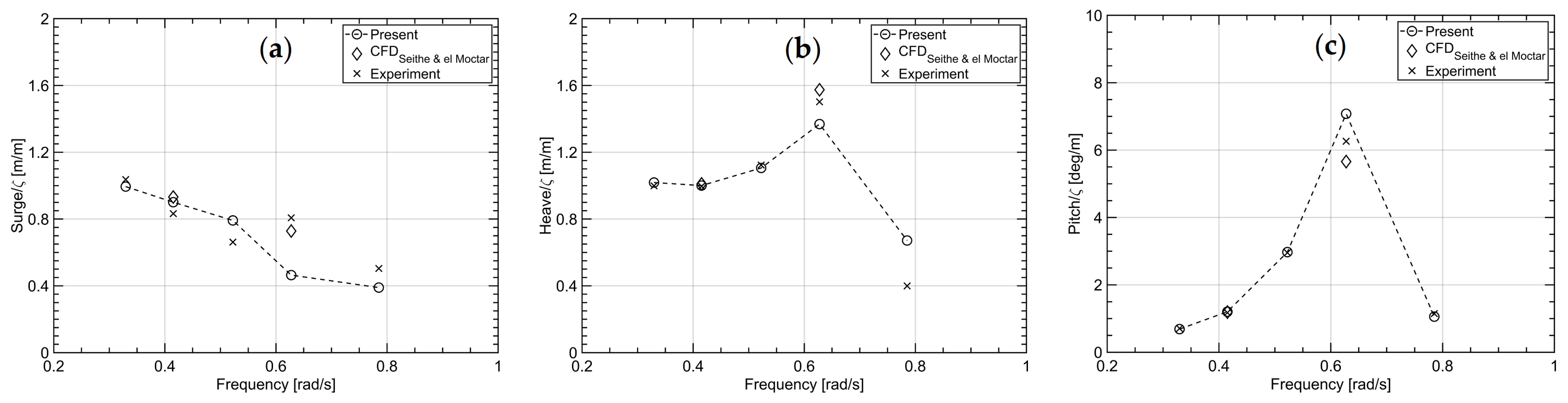
4.1. Validation of the Numerical Model
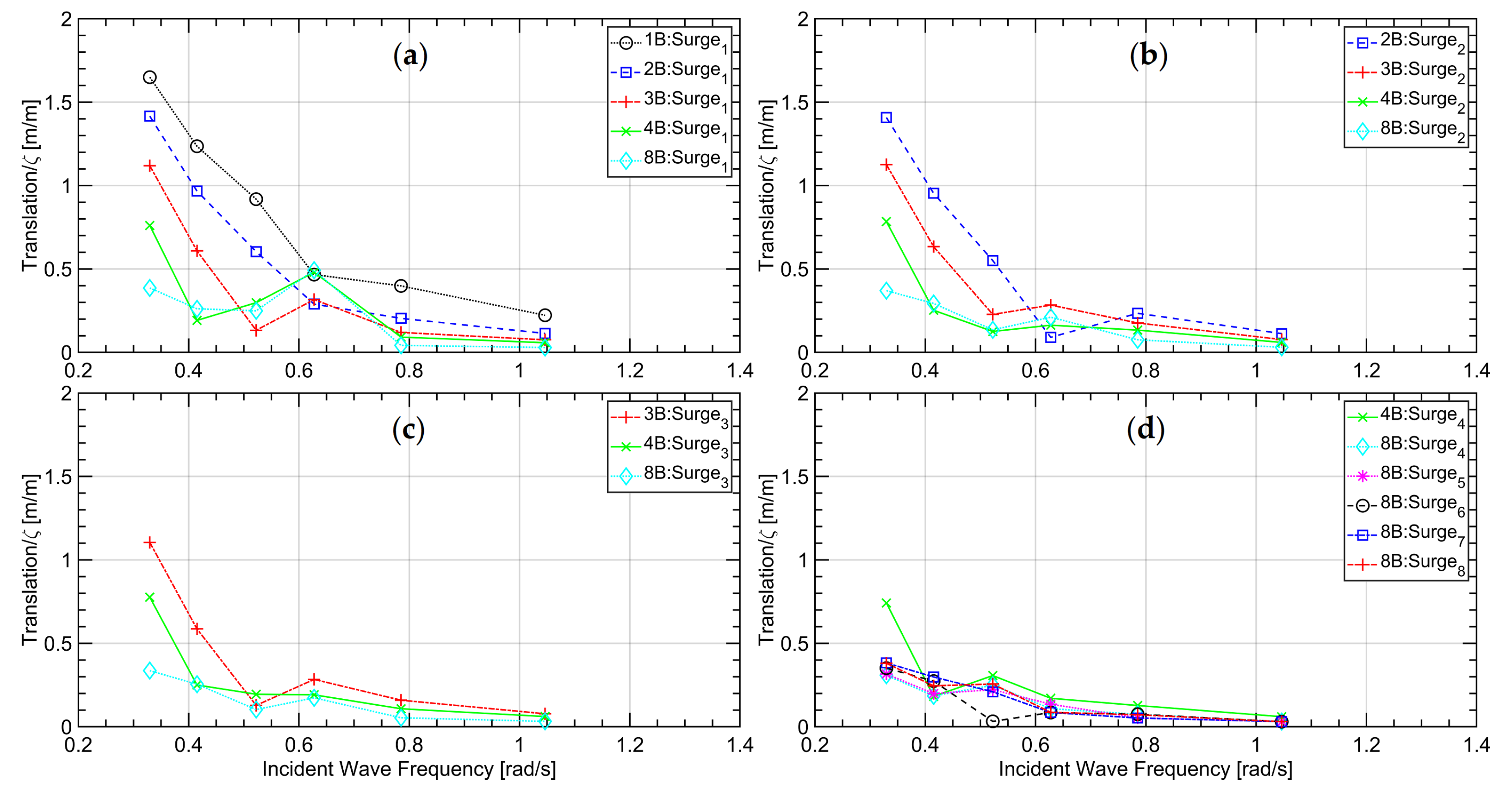
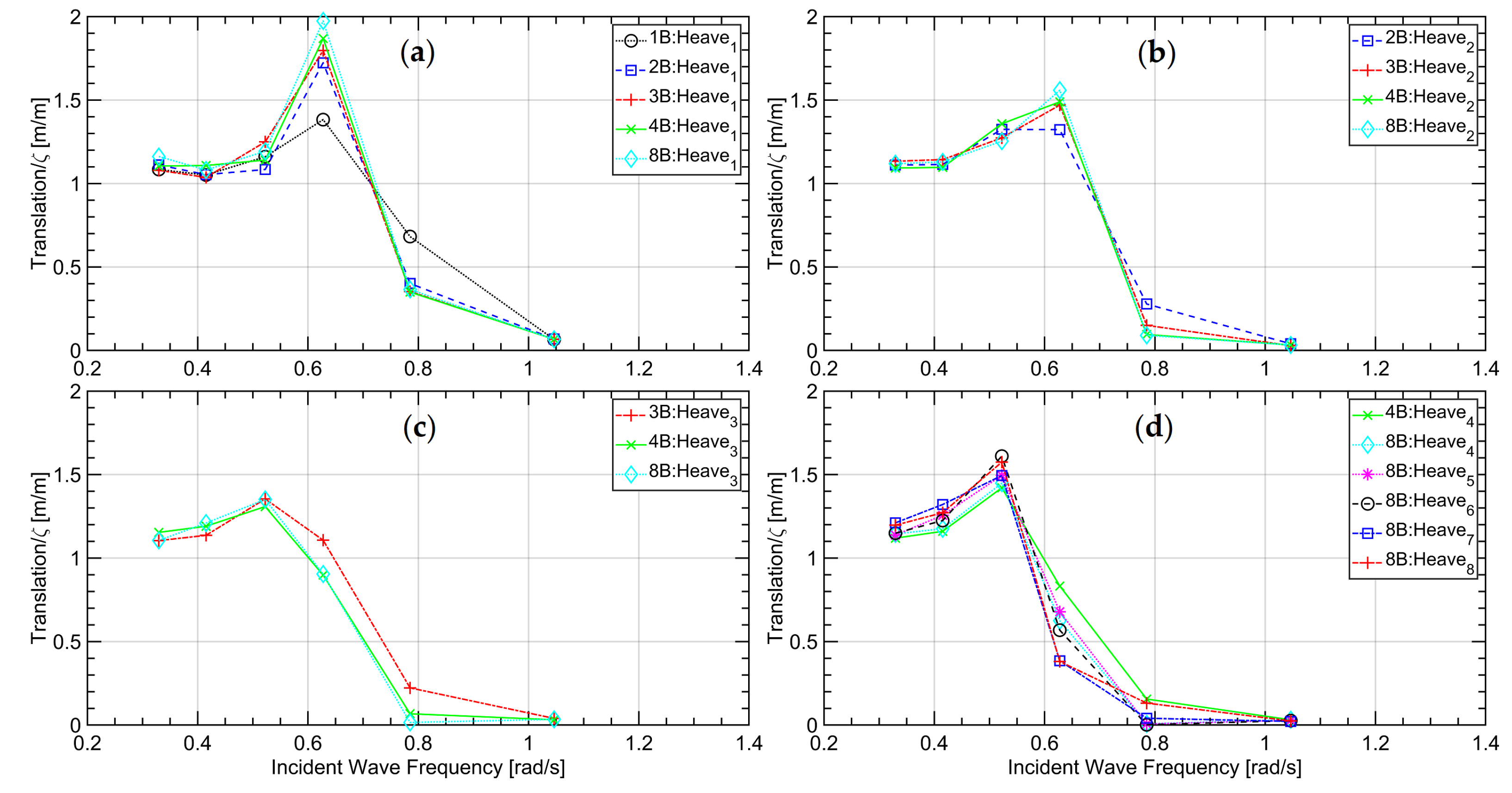
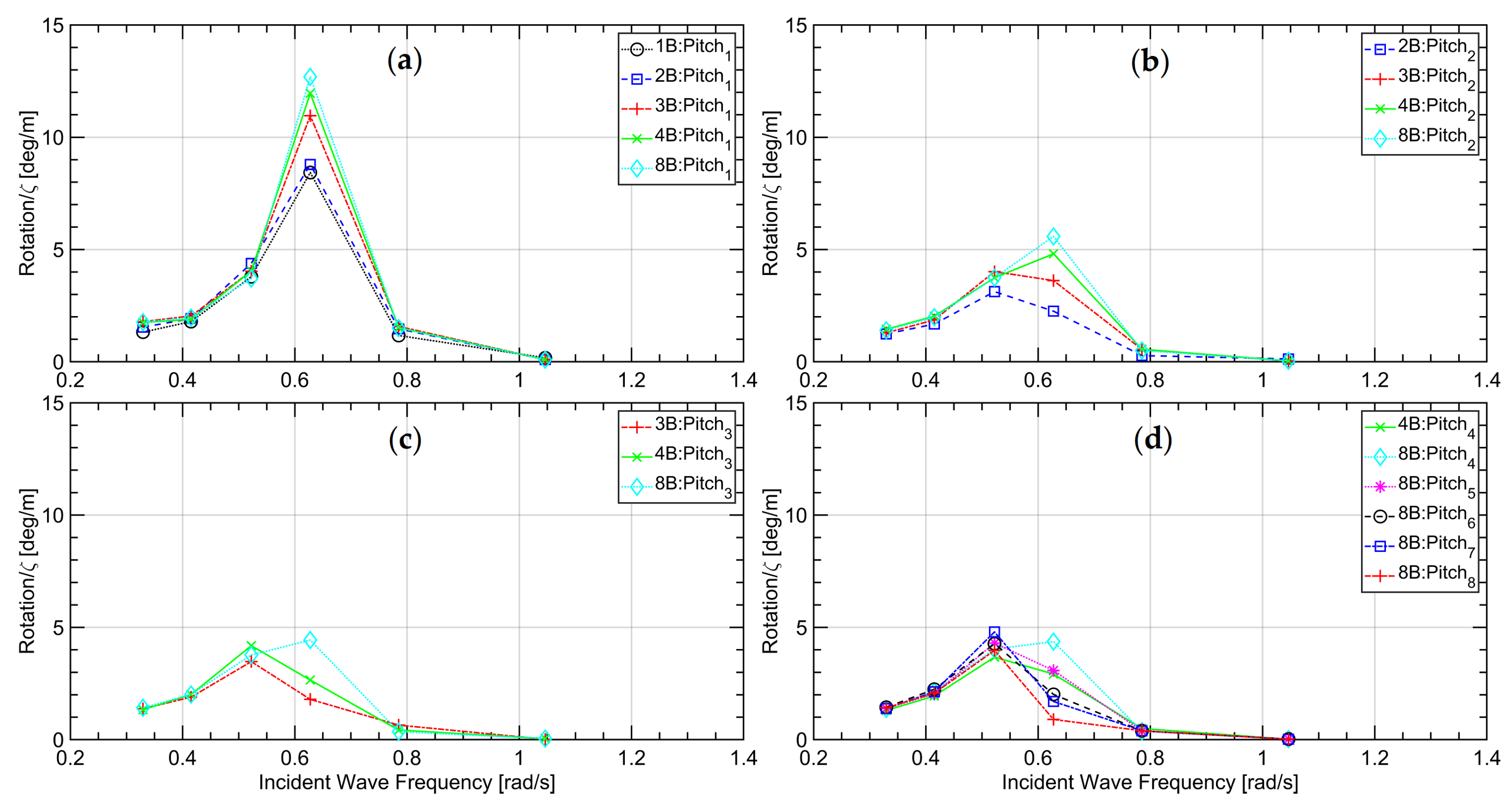
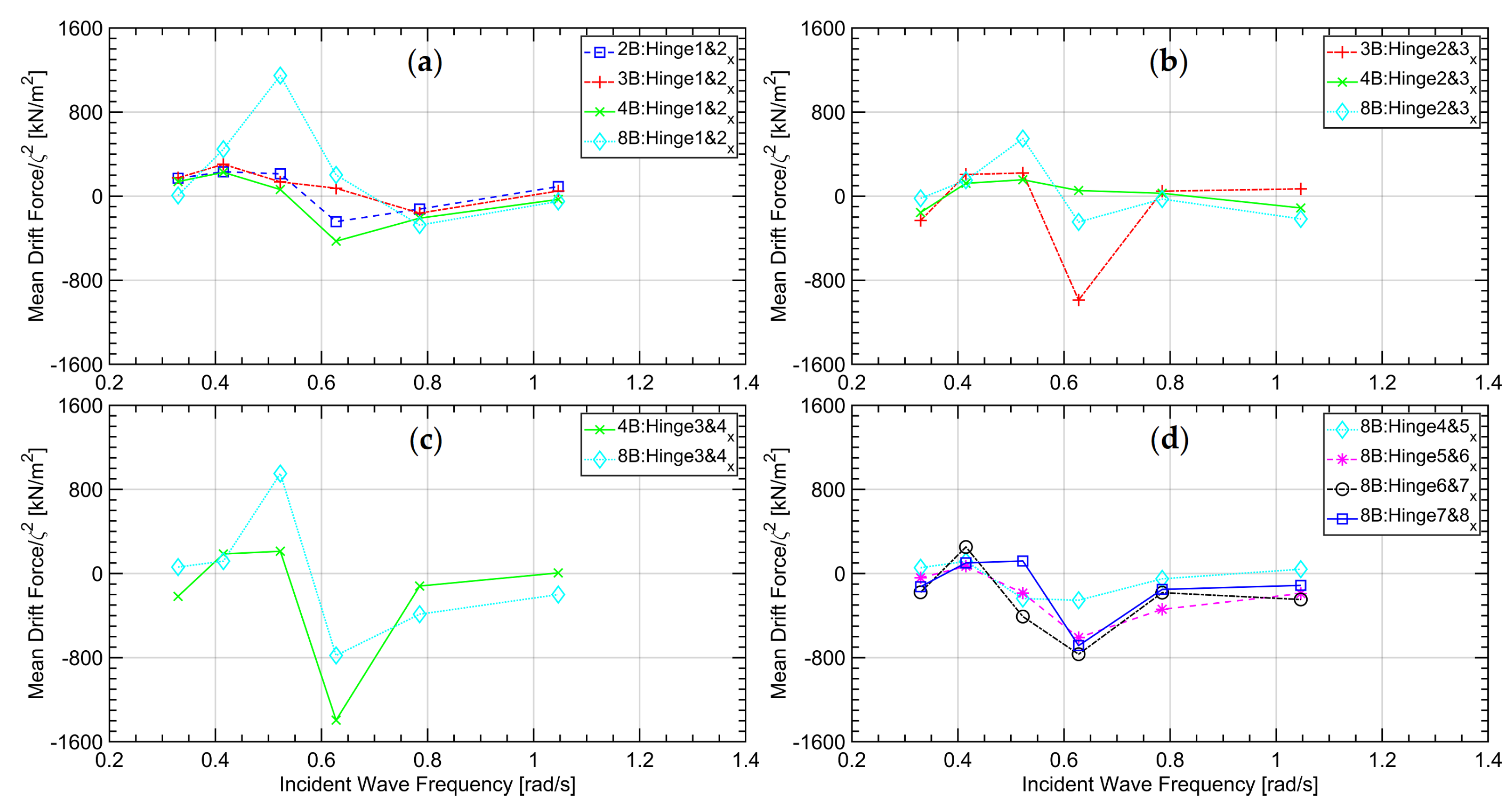
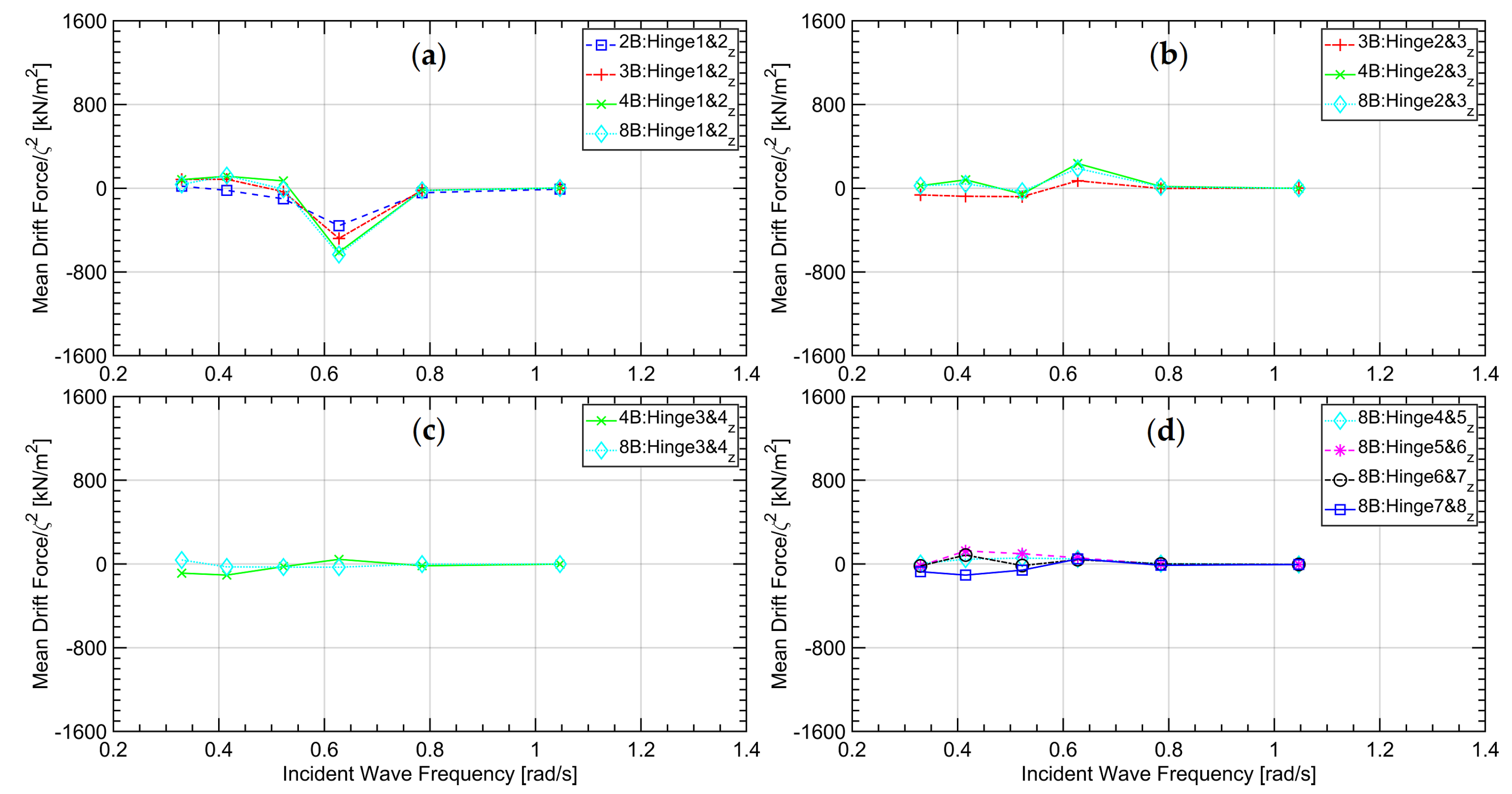
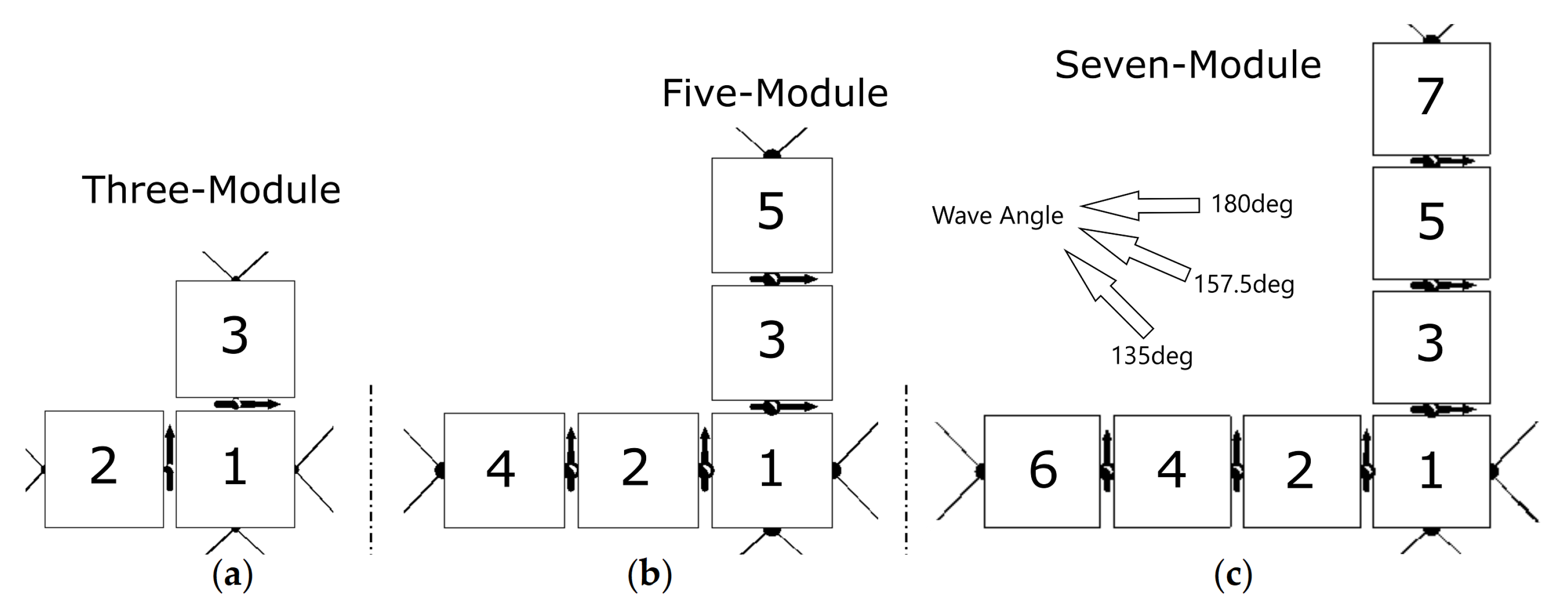
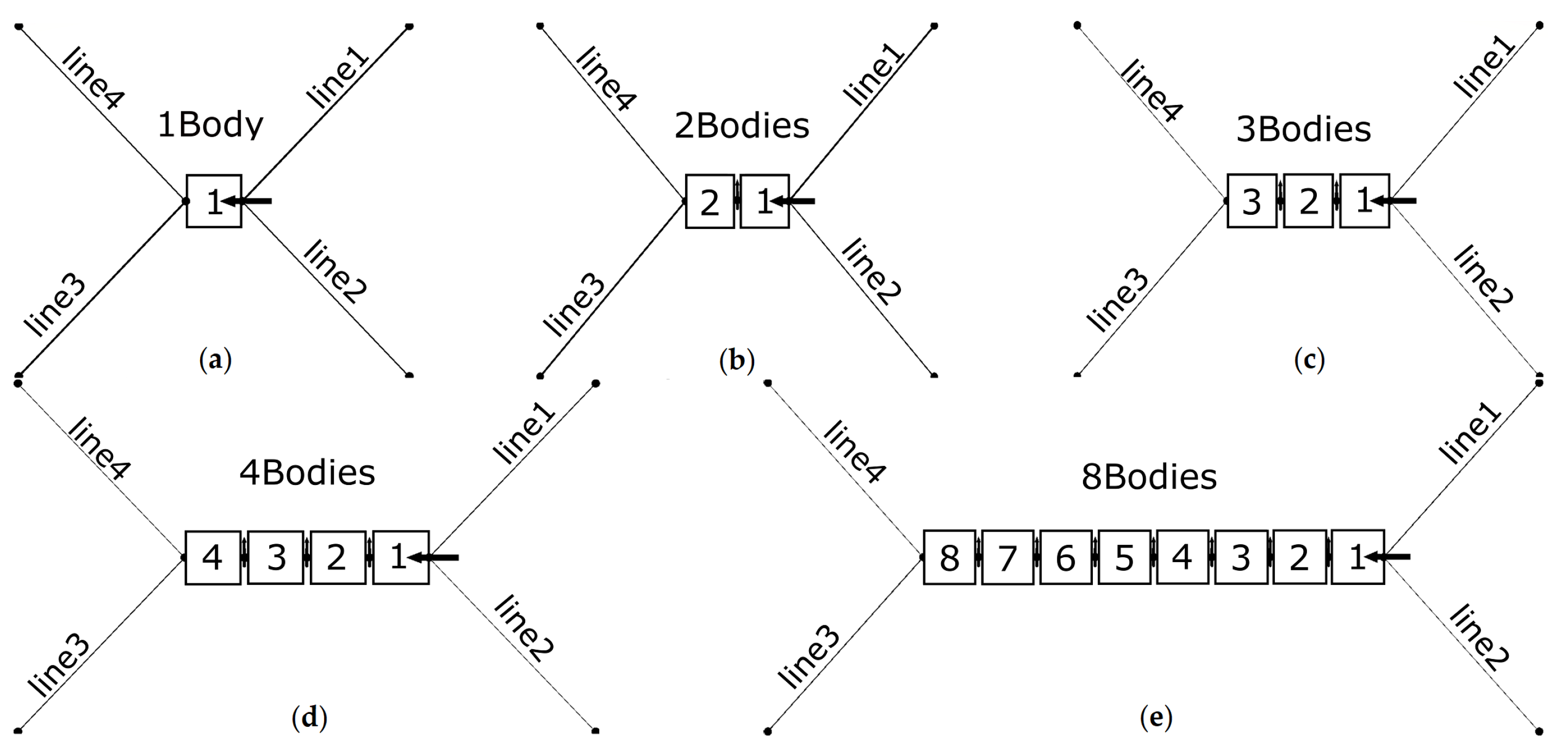
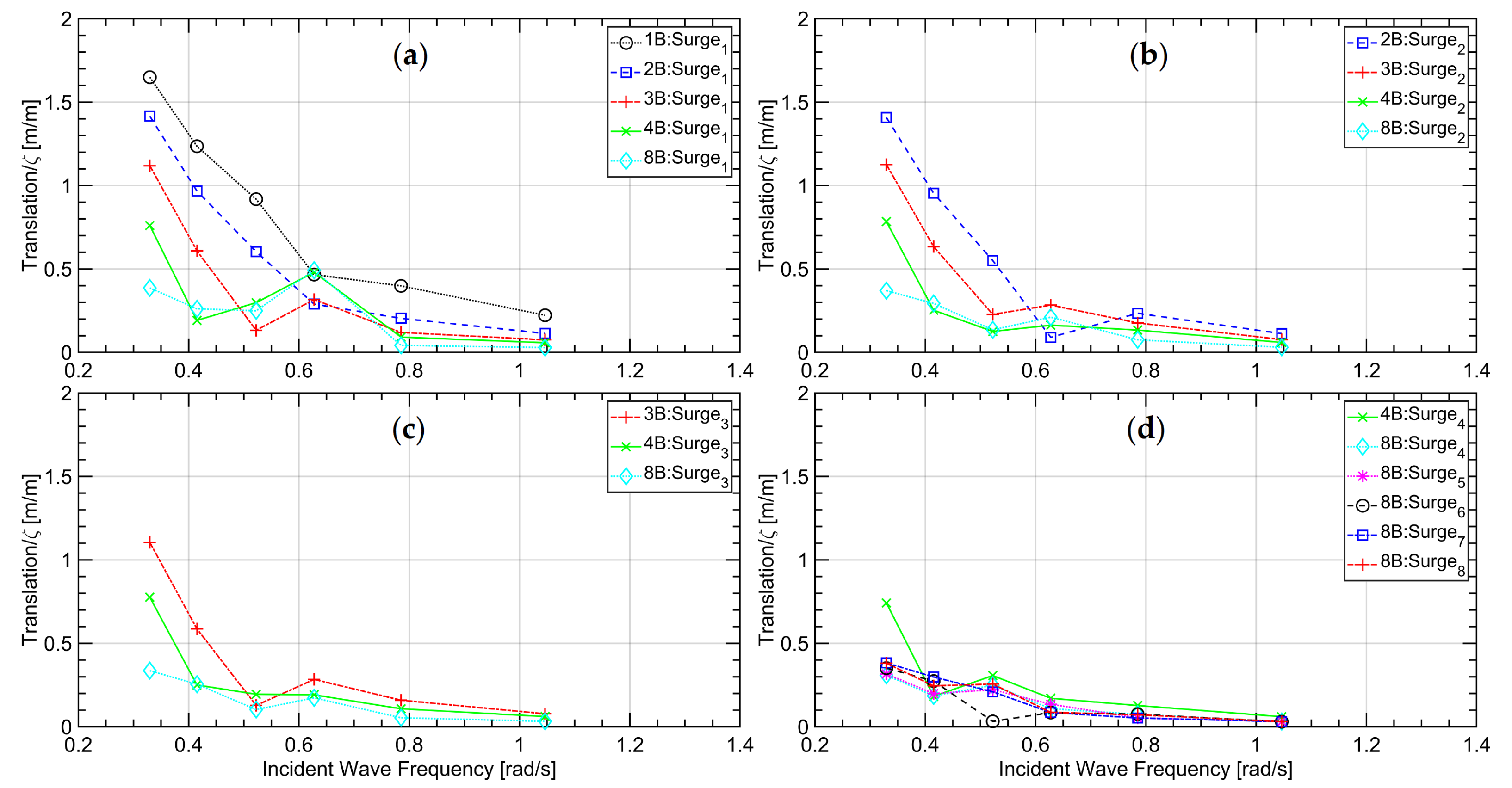
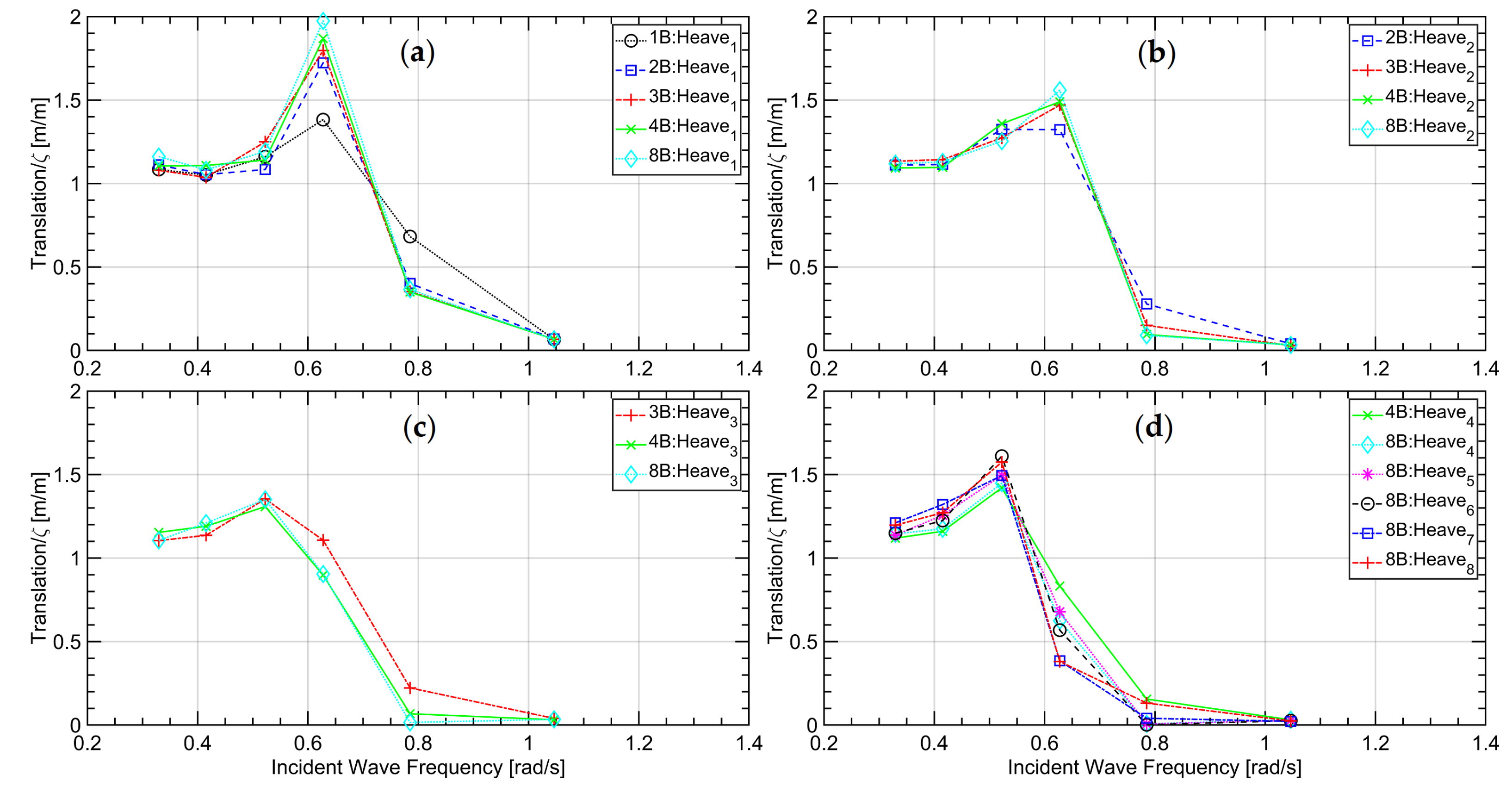
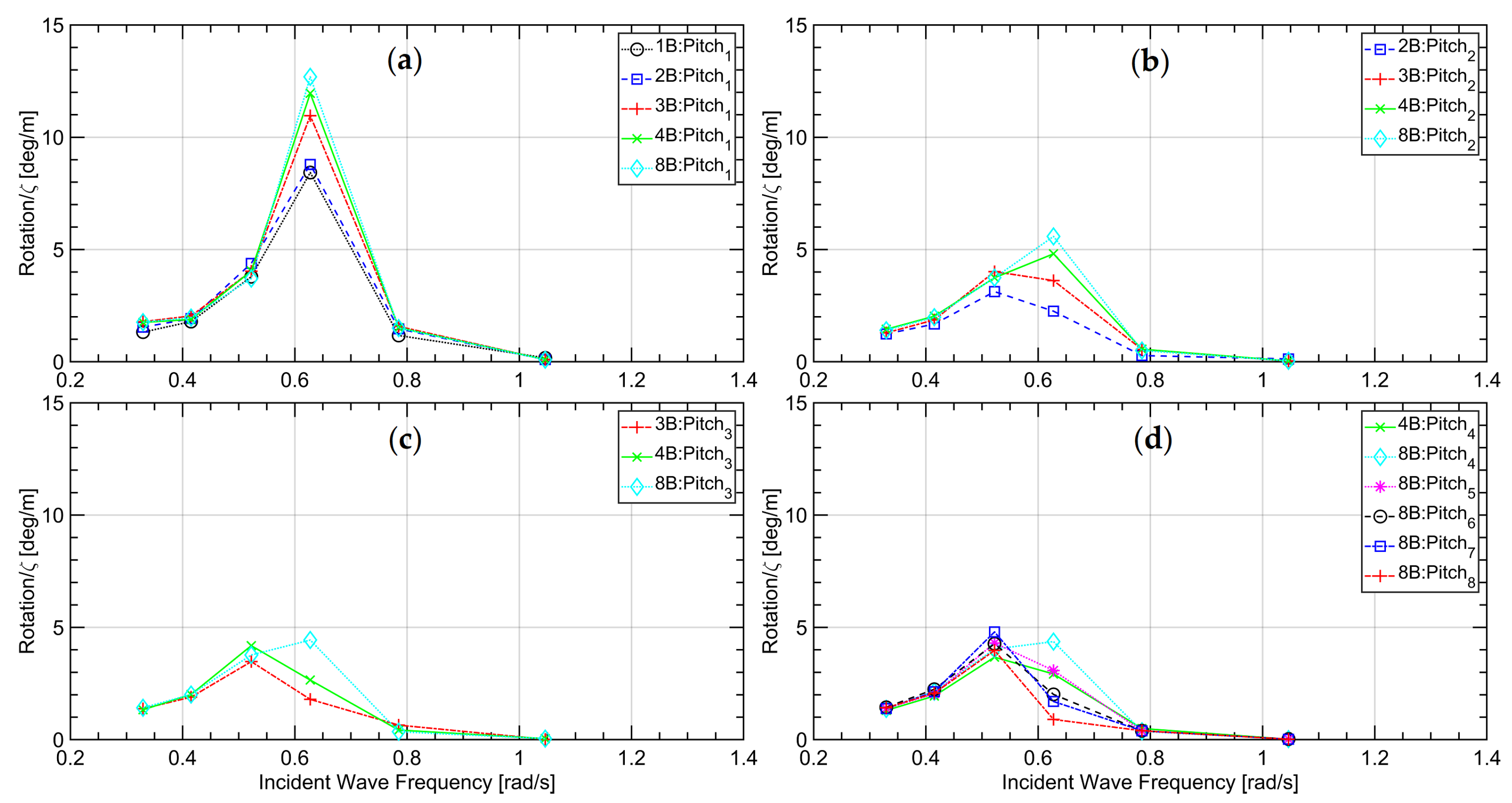
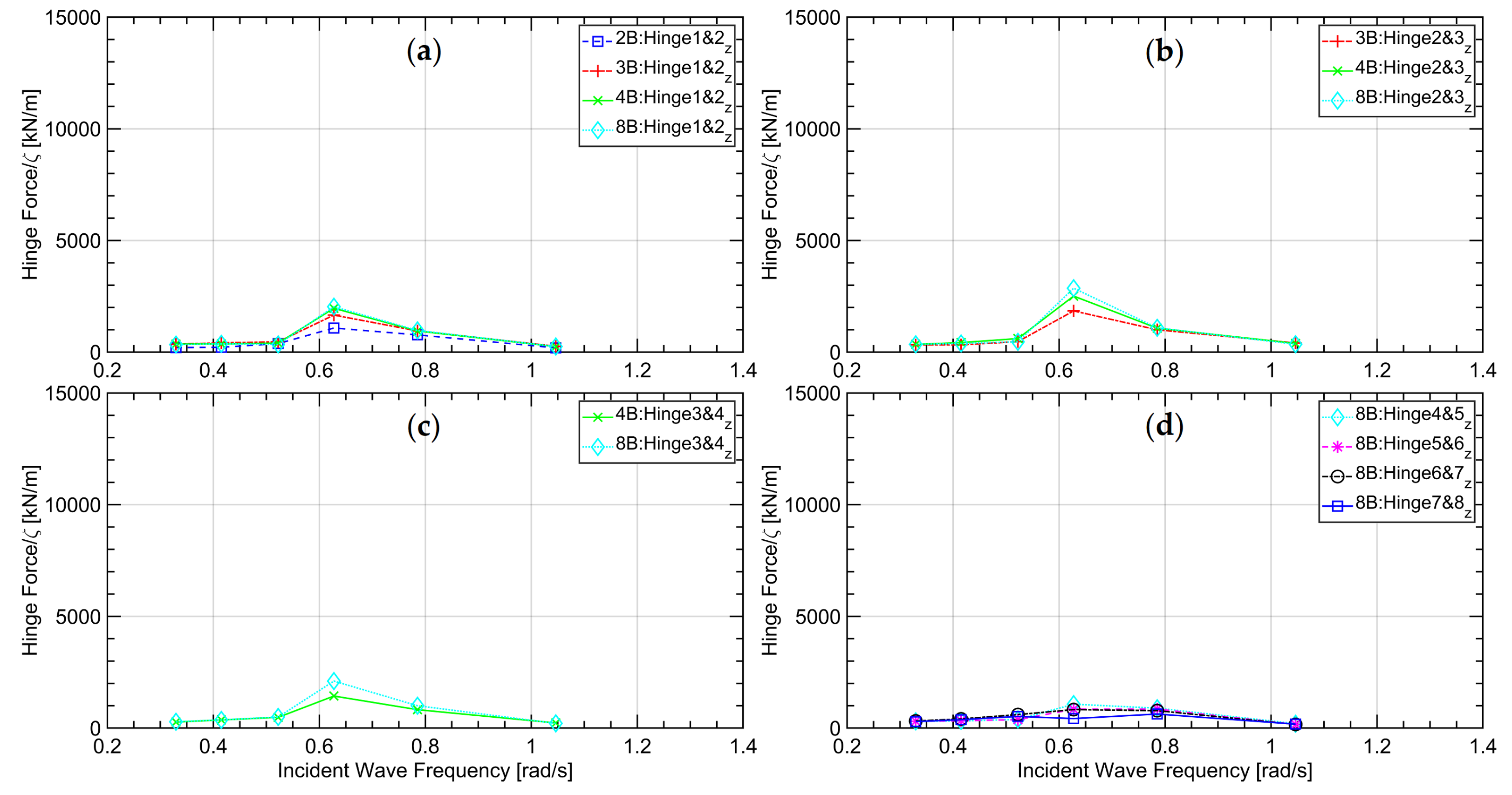
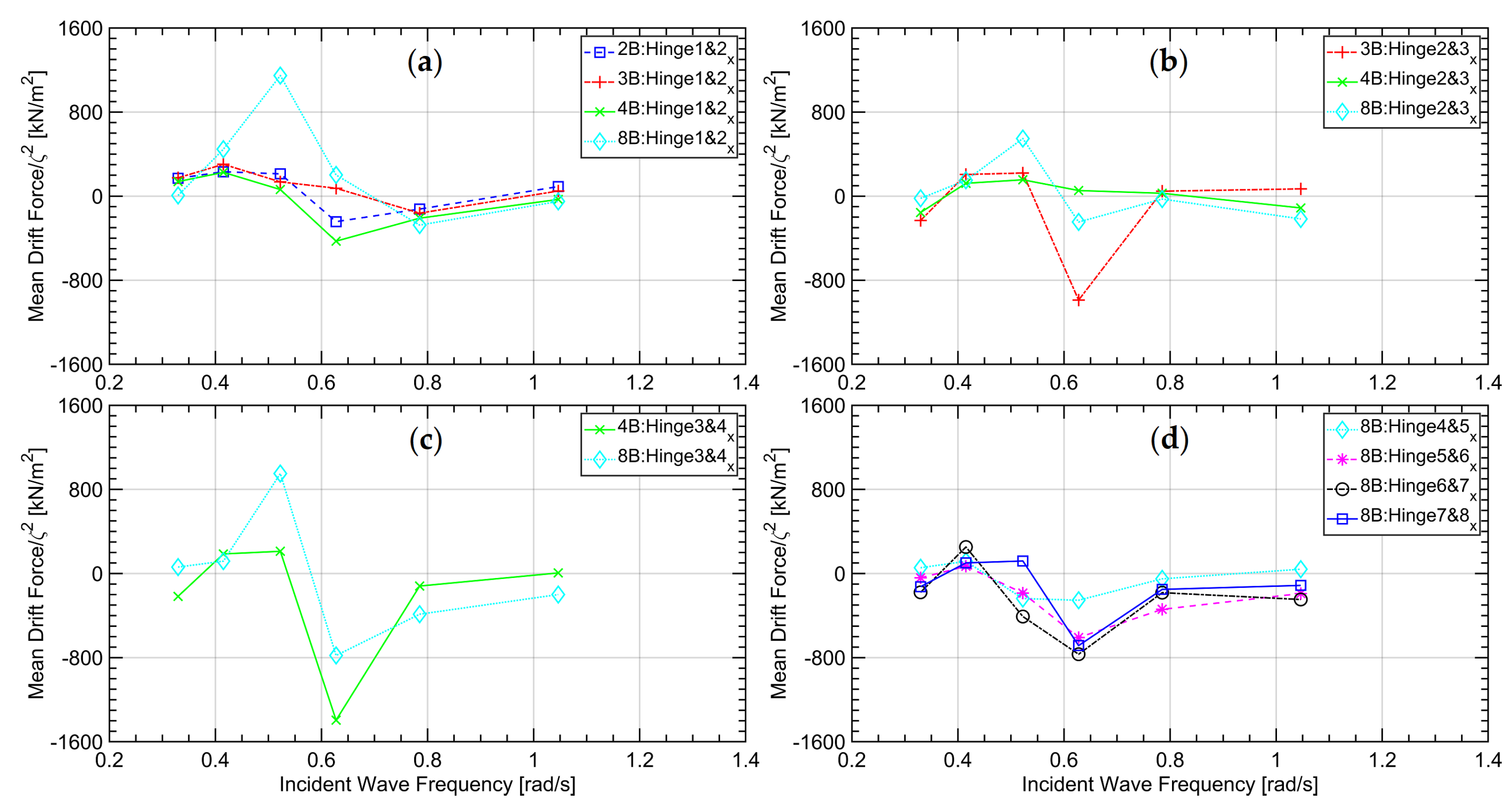
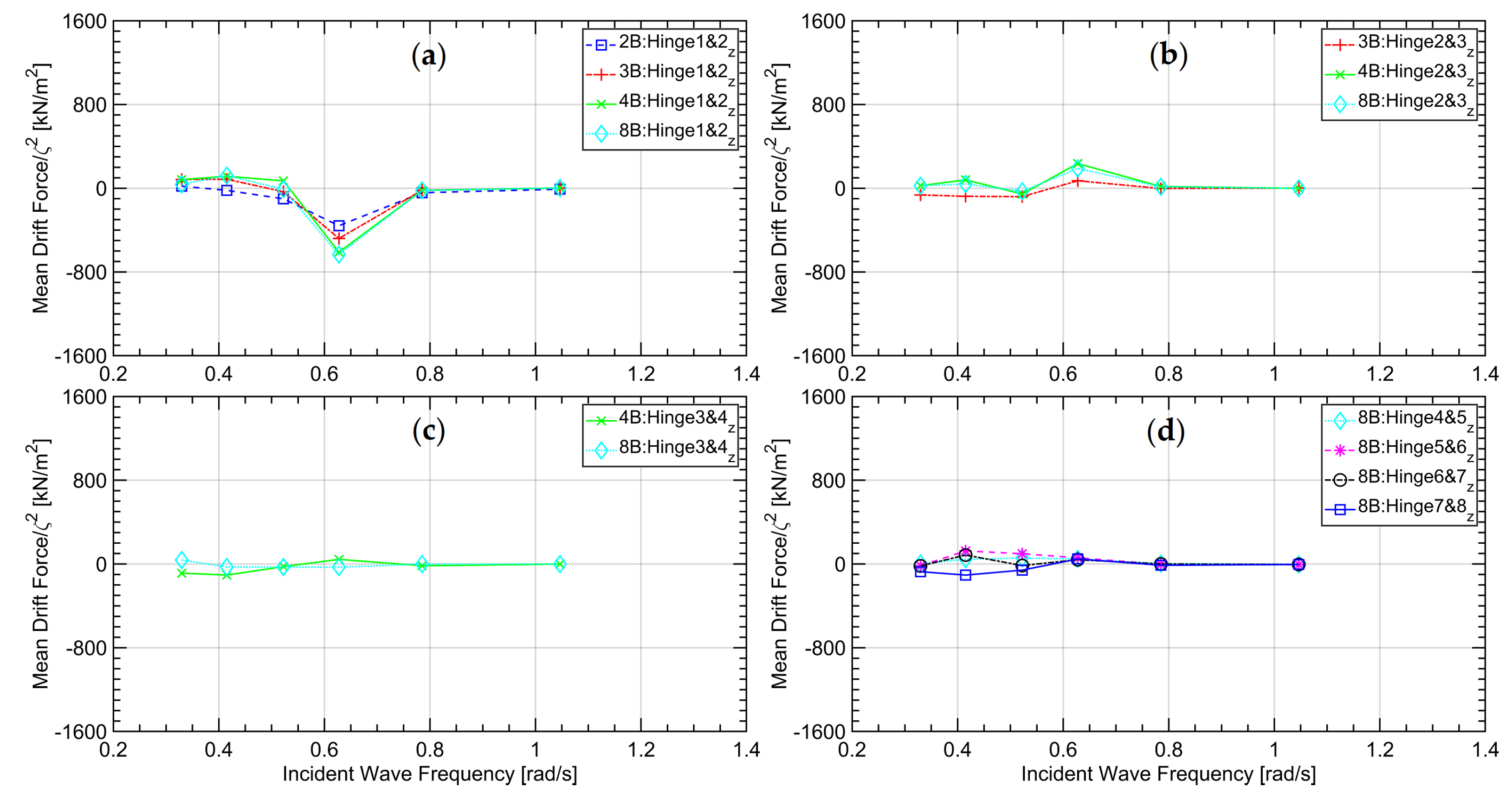
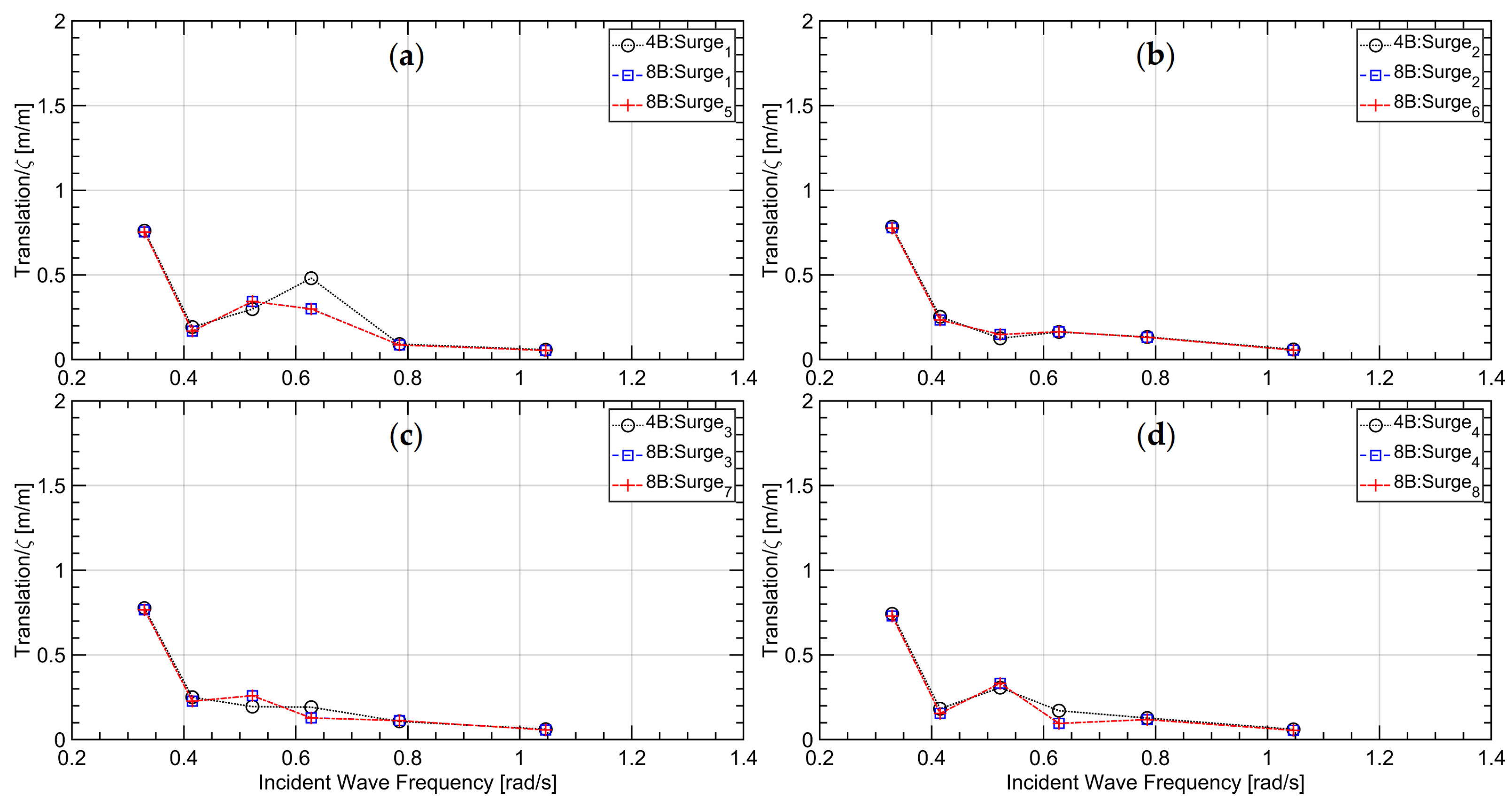
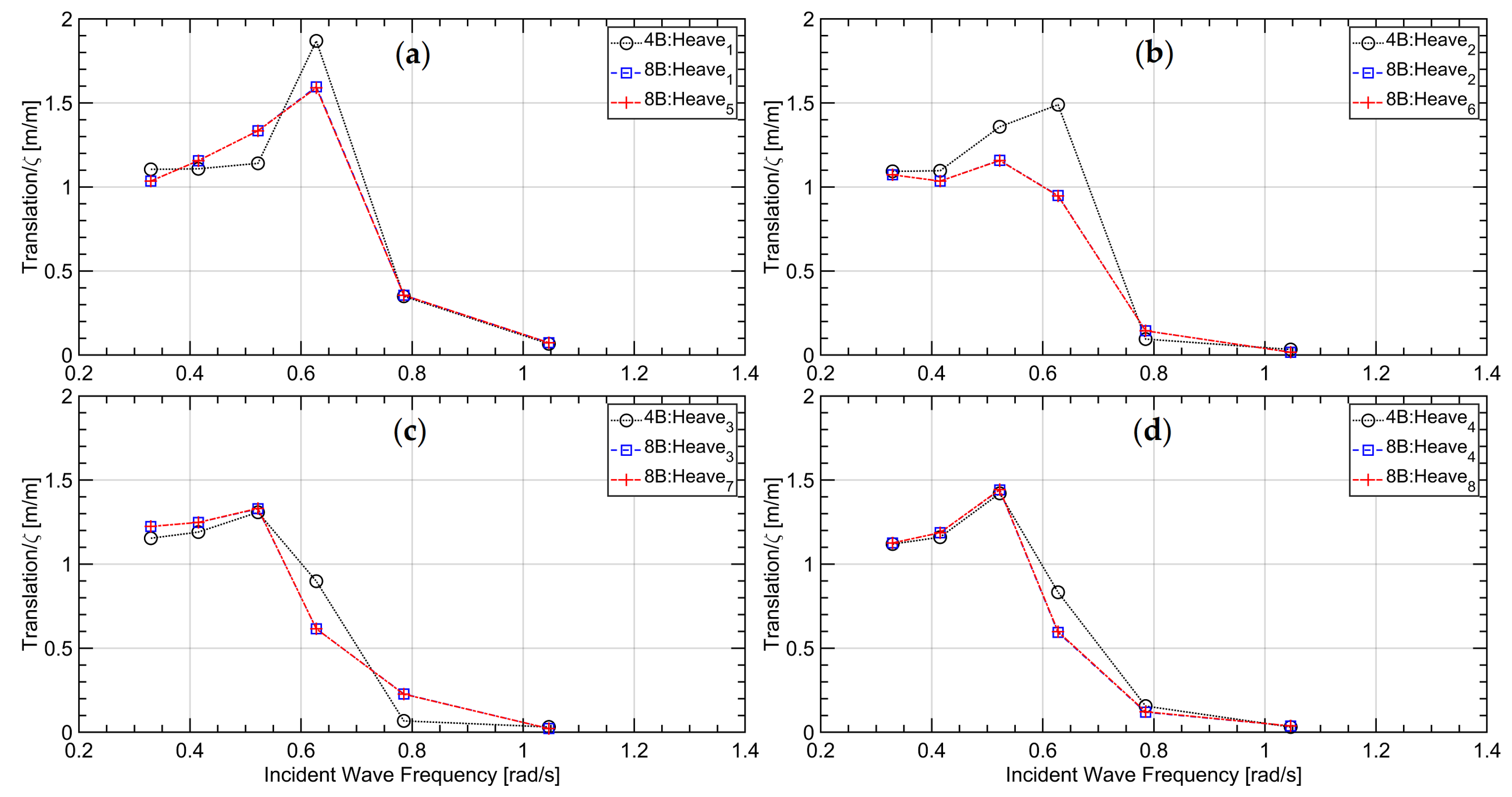
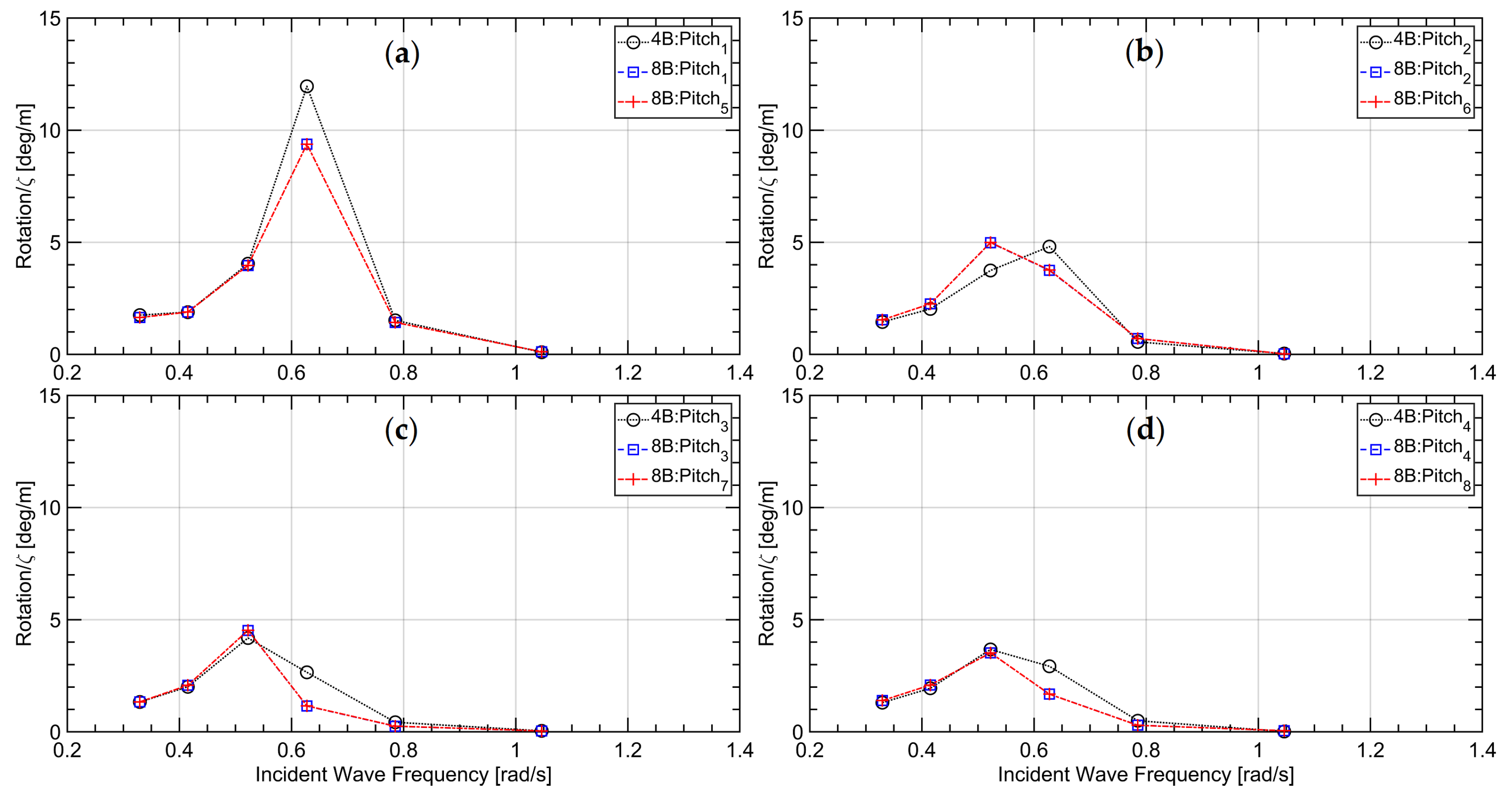
4.2. Sensitivity to the Number of Modules
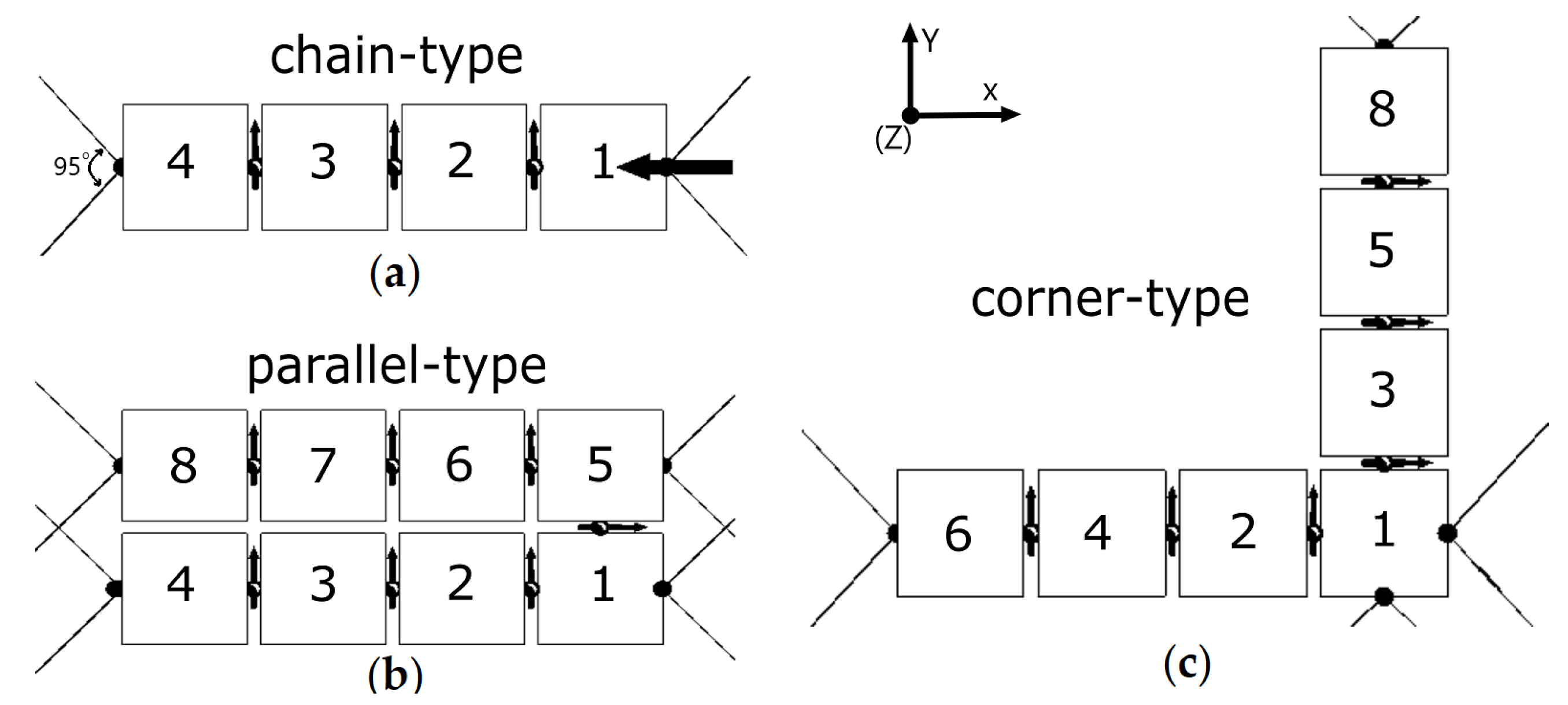
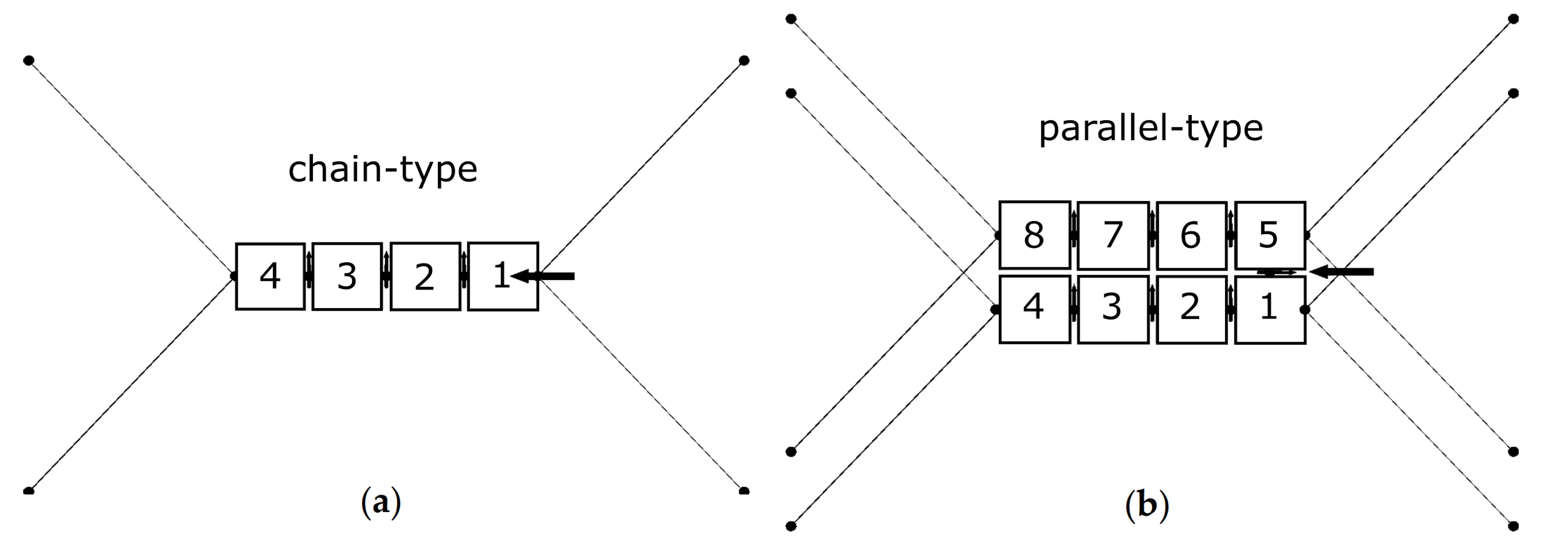
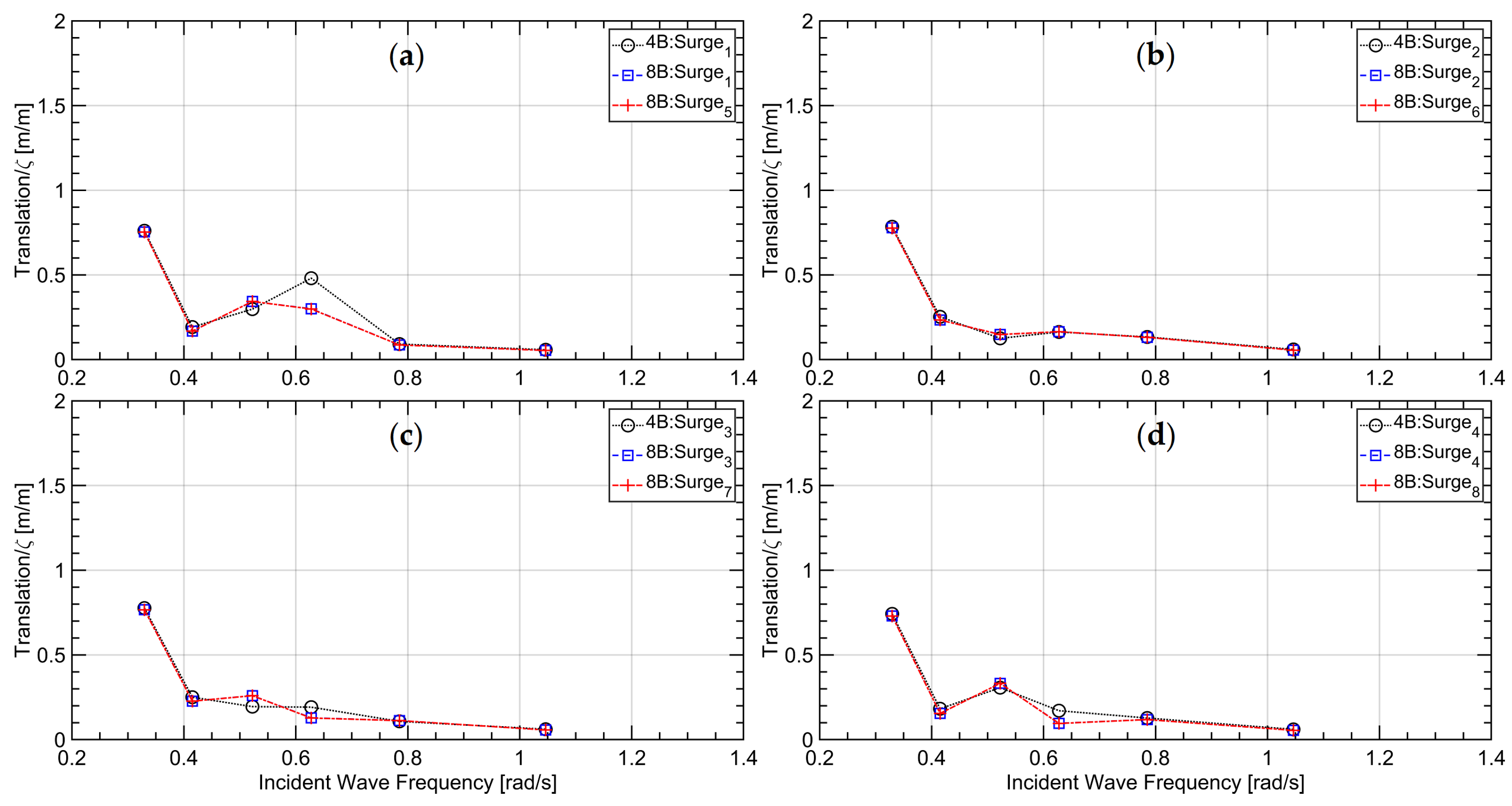
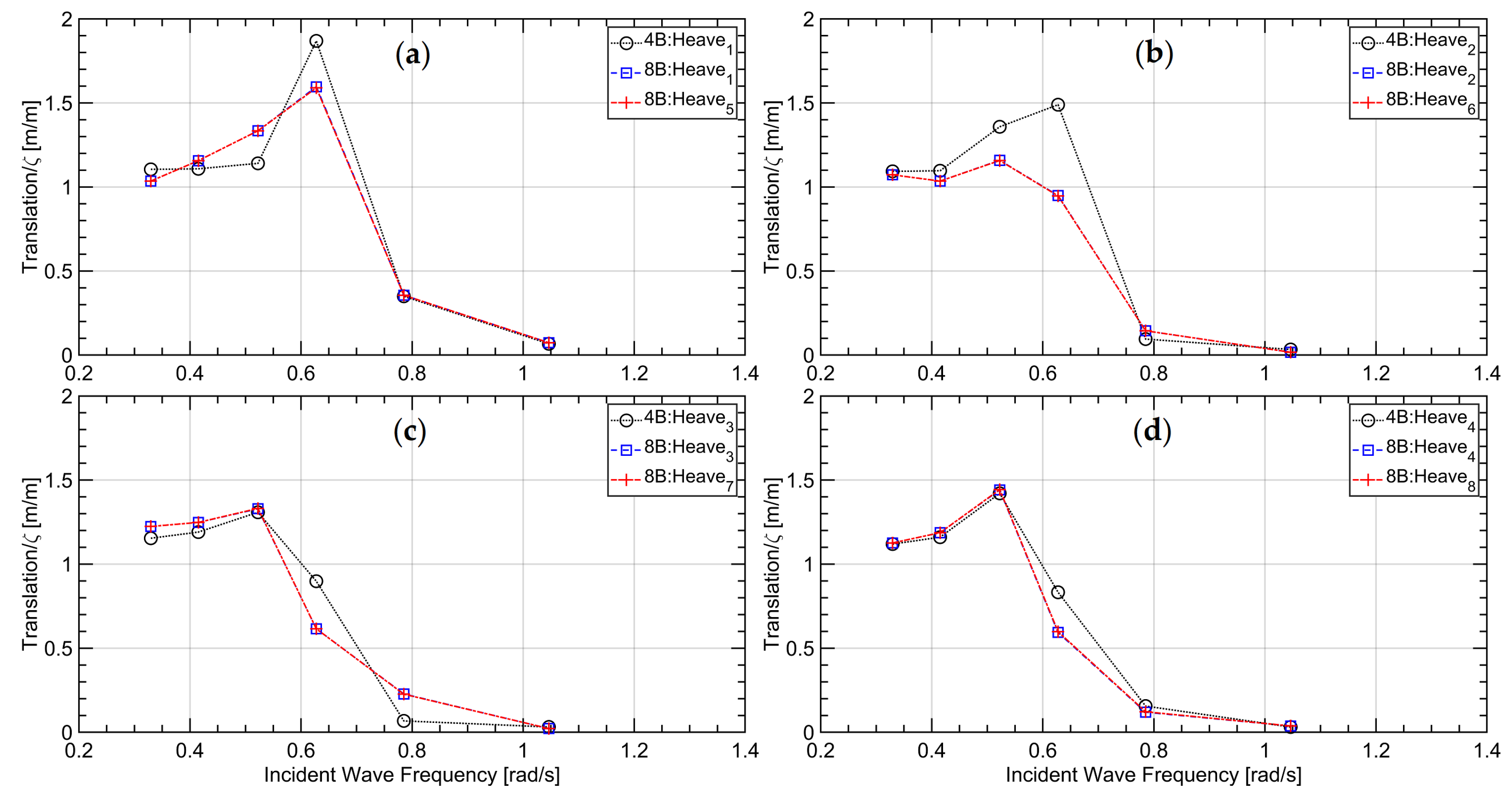
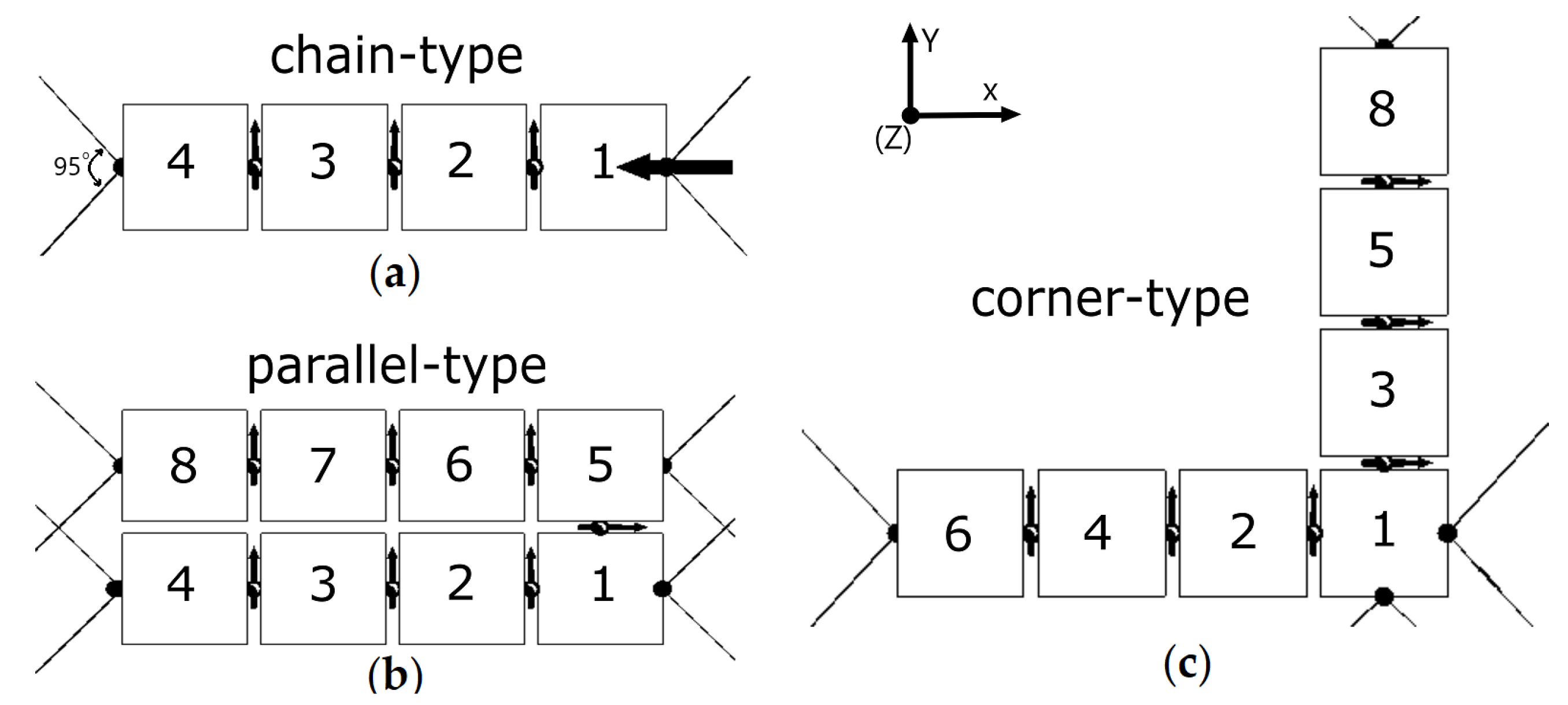
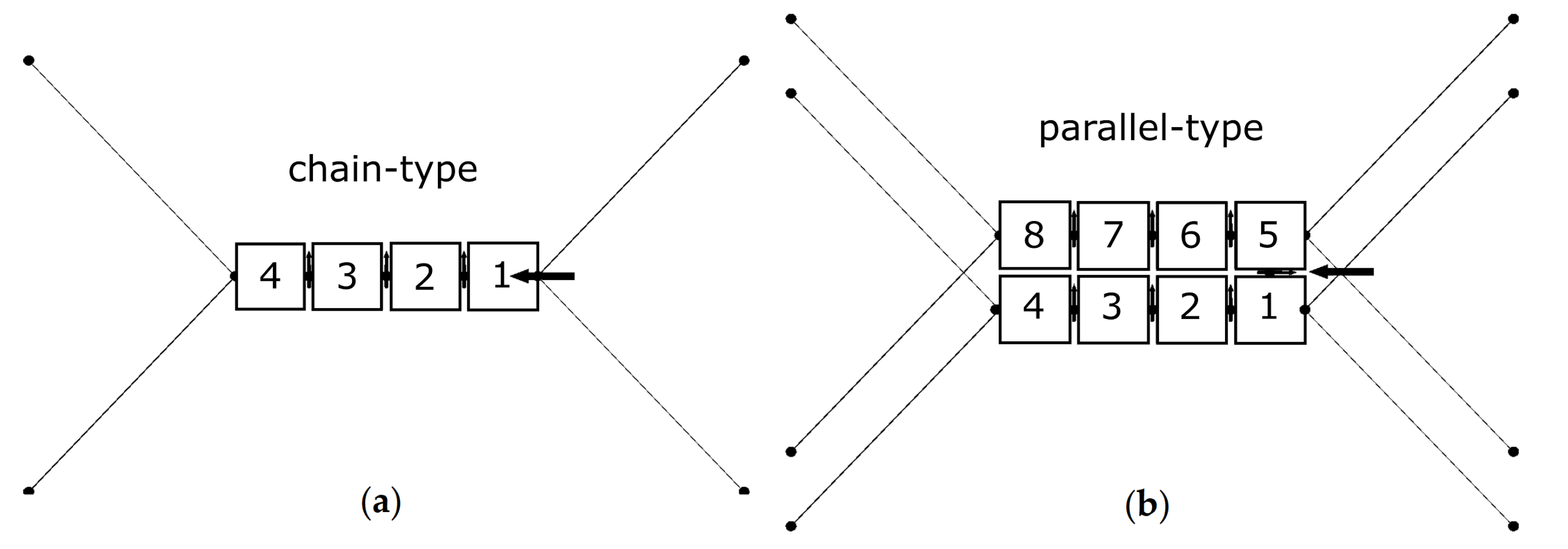
4.3. Sensitivity to Module Arrangement
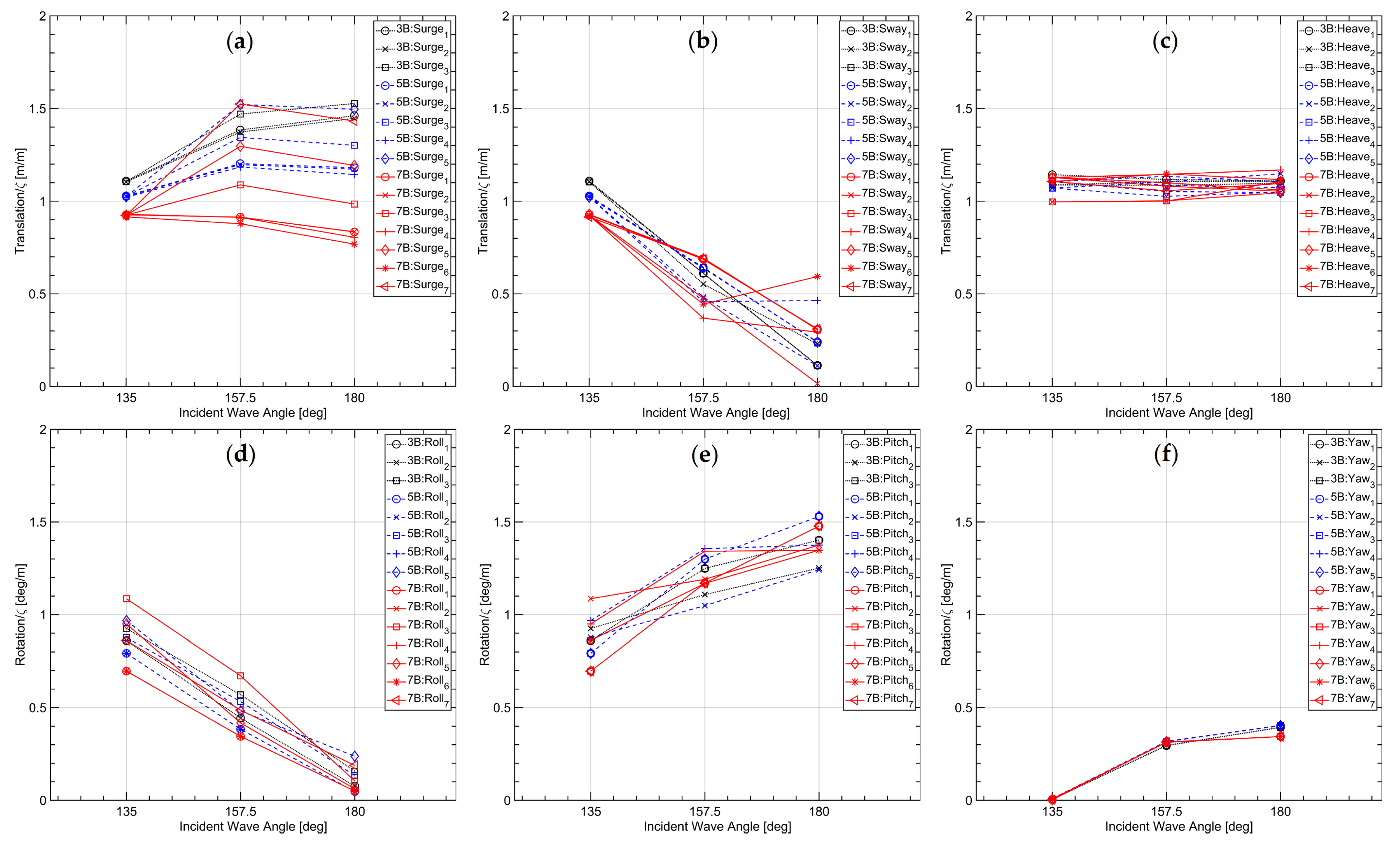
4.4. Sensitivity to Incident Wave Angle
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Flikkema, M.; Waals, O. Space@ Sea the floating solution. Front. Mar. Sci. 2019, 6, 553. [Google Scholar] [CrossRef]
- Wan, L.; Han, M.; Jin, J.; Zhang, C.; Magee, A.R.; Hellan, Ø.; Wang, C.M. Global dynamic response analysis of oil storage tank in finite water depth: Focusing on fender mooring system parameter design. Ocean Eng. 2018, 148, 247–262. [Google Scholar] [CrossRef]
- Suzuki, H. Safety target of very large floating structure used as a floating airport. Mar. Struct. 2001, 14, 103–113. [Google Scholar] [CrossRef]
- Wang, C.; Tay, Z. Very large floating structures: Applications, research and development. Procedia Eng. 2011, 14, 62–72. [Google Scholar] [CrossRef] [Green Version]
- Olsen, T.O. Fish farming in floating structures. In WCFS2019; Springer: Berlin/Heidelberg, Germany, 2020; pp. 191–208. [Google Scholar]
- Liu, H.; Kumar, A.; Reindl, T. The dawn of floating solar—Technology, benefits, and challenges. In WCFS2019; Springer: Berlin/Heidelberg, Germany, 2020; pp. 373–383. [Google Scholar]
- Lamas-Pardo, M.; Iglesias, G.; Carral, L. A review of very large floating structures (VLFS) for coastal and offshore uses. Ocean Eng. 2015, 109, 677–690. [Google Scholar] [CrossRef]
- Suzuki, H.; Riggs, H.; Fujikubo, M.; Shugar, T.; Seto, H.; Yasuzawa, Y.; Bhattacharya, B.; Hudson, D.; Shin, H. Very large floating structures. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; Volume 42681, pp. 597–608. [Google Scholar]
- Wang, G.; Goldfeld, Y.; Drimer, N. Expanding coastal cities–Proof of feasibility for modular floating structures (MFS). J. Clean. Prod. 2019, 222, 520–538. [Google Scholar] [CrossRef]
- Ren, N.; Zhang, C.; Magee, A.R.; Hellan, Ø.; Dai, J.; Ang, K.K. Hydrodynamic analysis of a modular multi-purpose floating structure system with different outermost connector types. Ocean Eng. 2019, 176, 158–168. [Google Scholar] [CrossRef]
- Drummen, I.; Olbert, G. Conceptual design of a modular floating multi-purpose island. Front. Mar. Sci. 2021, 8, 86. [Google Scholar] [CrossRef]
- Riggs, H.; Ertekin, R. Approximate methods for dynamic response of multi-module floating structures. Mar. Struct. 1993, 6, 117–141. [Google Scholar] [CrossRef]
- Gao, R.; Tay, Z.; Wang, C.; Koh, C. Hydroelastic response of very large floating structure with a flexible line connection. Ocean Eng. 2011, 38, 1957–1966. [Google Scholar] [CrossRef]
- Fu, S.; Moan, T.; Chen, X.; Cui, W. Hydroelastic analysis of flexible floating interconnected structures. Ocean Eng. 2007, 34, 1516–1531. [Google Scholar] [CrossRef]
- Michailides, C.; Loukogeorgaki, E.; Angelides, D.C. Response analysis and optimum configuration of a modular floating structure with flexible connectors. Appl. Ocean Res. 2013, 43, 112–130. [Google Scholar] [CrossRef]
- Wang, C.M.; Riyansyah, M.; Choo, Y.S. Reducing hydroelastic response of interconnected floating beams using semi-rigid connections. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; Volume 43444, pp. 1419–1425. [Google Scholar]
- Xu, D.L.; Zhang, H.C.; Xia, S.Y.; Lu, C.; Qi, E.R.; Tian, C.; Wu, Y.S. Nonlinear dynamic characteristics of a multi-module floating airport with rigid-flexible connections. J. Hydrodyn. 2018, 30, 815–827. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, H. Methodology for the assessment and optimization of connection parameter combinations for modular floating structures. J. Offshore Mech. Arct. Eng. 2021, 143, 021301. [Google Scholar] [CrossRef]
- Woernle, C. Mehrkörpersysteme; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Newman, J. Wave effects on hinged bodies. In Part II—Hinge Loads. 1997. Available online: http://www.wamit.com/publications.htm (accessed on 15 August 2021).
- Ghesmi, M.; von Graefe, A.; Shigunov, V.; Friedhoff, B.; el Moctar, O. Comparison and validation of numerical methods to assess hydrodynamic loads on mechanical coupling of multiple bodies. Ship Technol. Res. 2019, 66, 9–21. [Google Scholar] [CrossRef]
- Rogne, Ø.Y. Numerical and Experimental Investigation of a Hinged 5-Body Wave Energy Converter. Ph.D. Thesis, Norges Teknisk-Naturvitenskapelige Universitet, Fakultet for Ingeniørvitenskap og Teknologi, Institutt for Marin Teknikk, Trondheim, Norway, 2014. [Google Scholar]
- Diamantoulaki, I.; Angelides, D.C. Analysis of performance of hinged floating breakwaters. Eng. Struct. 2010, 32, 2407–2423. [Google Scholar] [CrossRef]
- Zhu, H.; Sueyoshi, M.; Hu, C.; Yoshida, S. Modelling and attitude control of a shrouded floating offshore wind turbine with hinged structure in extreme conditions. In Proceedings of the 2017 IEEE 6th International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017; pp. 762–767. [Google Scholar]
- ANSYS, A. AQWA User’s Manual Release 17.0; ANSYS Inc.: Canonsburg, PA, USA, 2016. [Google Scholar]
- Newman, J.N. Algorithms for the free-surface Green function. J. Eng. Math. 1985, 19, 57–67. [Google Scholar] [CrossRef]
- Clark, P.; Malenica, Š.; Molin, B. An heuristic approach to wave drift damping. Appl. Ocean Res. 1993, 15, 53–55. [Google Scholar] [CrossRef]
- Thill, C.; Sri Paravastu, R. Model Tests Report D4.3 Space@Sea; Technical Report; Delft University of Technology: Delft, The Netherlands, 2018. [Google Scholar]
- Flikkema, M.; Breuls, M.; Jak, R.; de Ruijter, R.; Drummen, I.; Jordaens, A.; Adam, F.; Czapiewska, K.; Lin, F.Y.; Schott, D.; et al. Floating Island Development and Deployment Roadmap; Technical Report; Space@Sea: Wageningen, The Netherlands, 2021. [Google Scholar]
- Seithe, G.; el Moctar, O. Wave-Induced Motions of Moored and Coupled Multi-Body Offshore Structures. In Proceedings of the 11th International Workshop on Ship and Marine Hydrodynamic, Hamburg, Germany, 22–25 September 2019; pp. 85–97. [Google Scholar]
- Featherstone, R. Rigid Body Dynamics Algorithms; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length | Breadth | Height | Draft | Mass | CoG 1 | |||
|---|---|---|---|---|---|---|---|---|
| 45 m | 45 m | 15 m | 9 m | 18,281.9 t | 8.72 m | 16.8 m | 16.8 m | 18.375 m |
| Unstretched Length | Stiffness | Pretension |
|---|---|---|
| 161 m | 64.19 kN/m | 2337.4 kN |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; el Moctar, O.; Schellin, T.E. Hydrodynamic Sensitivity of Moored and Articulated Multibody Offshore Structures in Waves. J. Mar. Sci. Eng. 2021, 9, 1028. https://doi.org/10.3390/jmse9091028
Jiang C, el Moctar O, Schellin TE. Hydrodynamic Sensitivity of Moored and Articulated Multibody Offshore Structures in Waves. Journal of Marine Science and Engineering. 2021; 9(9):1028. https://doi.org/10.3390/jmse9091028
Chicago/Turabian StyleJiang, Changqing, Ould el Moctar, and Thomas E. Schellin. 2021. "Hydrodynamic Sensitivity of Moored and Articulated Multibody Offshore Structures in Waves" Journal of Marine Science and Engineering 9, no. 9: 1028. https://doi.org/10.3390/jmse9091028
APA StyleJiang, C., el Moctar, O., & Schellin, T. E. (2021). Hydrodynamic Sensitivity of Moored and Articulated Multibody Offshore Structures in Waves. Journal of Marine Science and Engineering, 9(9), 1028. https://doi.org/10.3390/jmse9091028