1. Introduction
A ship is different in its own navigation operation from other traffic vehicles as it has a comparatively large mass, therefore, a large time constant. In addition, there are, in general, no visible traffic rules and separation lanes at all. Therefore, navigating a ship through dense traffic or congested waterways is not an easy task, and a navigator must be trained thoroughly and properly to avoid marine incidents in any unforeseen situation. Despite doing so, nowadays, the rate of collision among ships has been gradually increasing [
1], and most of these casualties are found mainly due to human mistakes [
2]. As many of the wrong decisions and miscalculation by humans results in marine casualties and environmental disasters, it is paramount to replace the human subjective factors by an intelligent decision-making system for ship navigation and collision avoidance.
The existing collision prevention technologies are mainly developed from two different perspectives. One is for assisting Officers On Watch (OOW) on board by detecting ship conflicts and setting alarms, and the other is for eliminating the human factors by proposing complete conflict resolution. Research on situational awareness had been carried out since the 1950s [
3], and the outcomes are commendable to support onboard officers, such as automatic radar plotting aid, ship domain approach etc. However, getting a reliable collision-free solution based on International Regulations for Preventing Collisions at Sea (COLREGs) rules [
4] for multiple ship encounters is still challenging as encountering situations is becoming more complex due to increased traffic density.
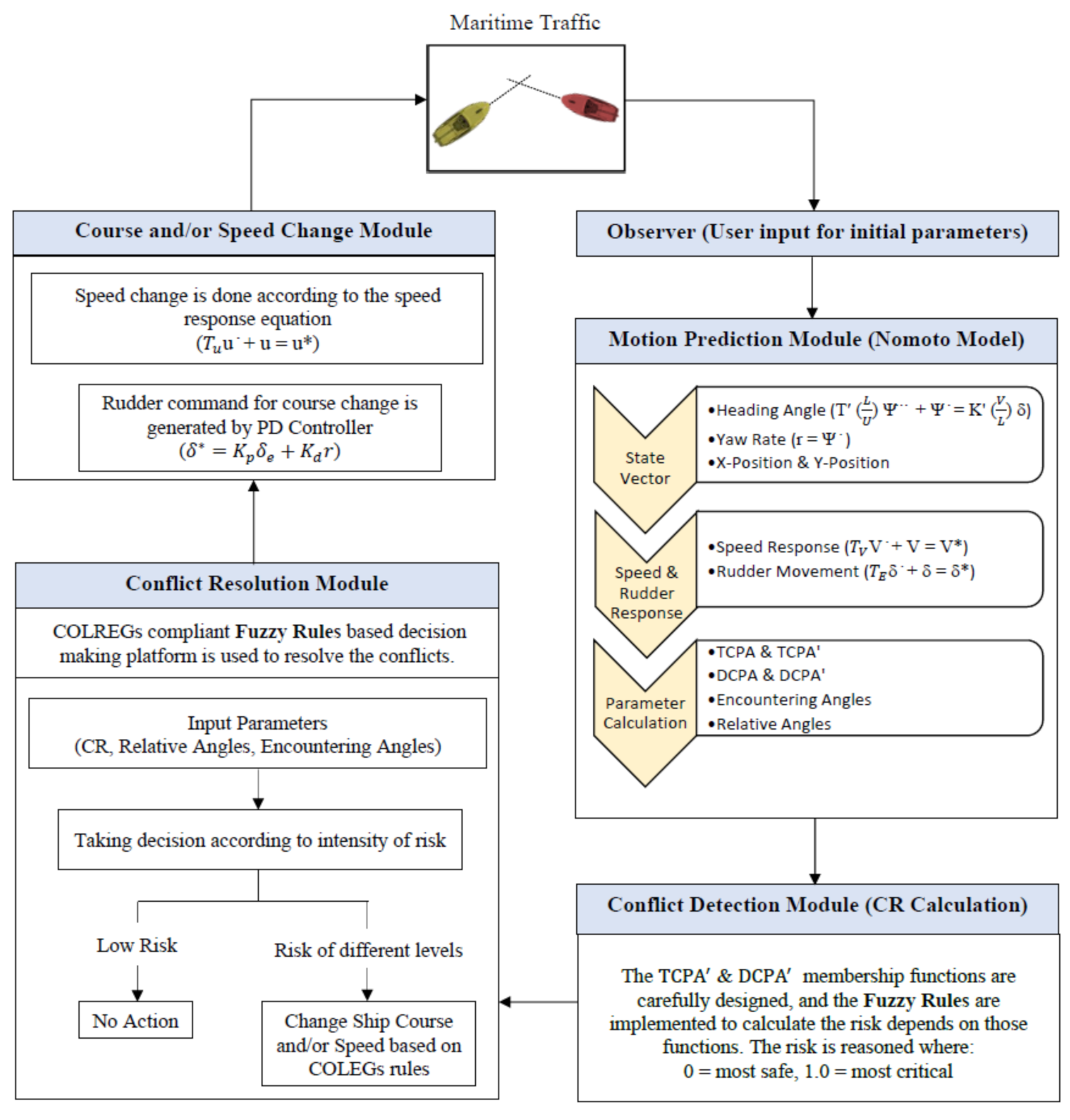
The whole process of collision avoidance system must go through five major components. These are (1) Extracting information from various sensors as an Observer to support other modules; (2) Predicting ship manoeuvring characteristics as a Ship Motion Prediction module; (3) Detecting Collision Risk (CR) quantitively as a Conflict Detection module; (4) Determining evasive solutions as a Conflict Resolution module, and (5) Implementing the solutions through actuators as a Course and Speed changing/keeping module. At this stage, this paper focuses mainly on the last four modules, i.e., Motion Prediction, Conflict Detection, Conflict Resolution, and Course and Speed keeping/changing module.
Ship motion prediction is a fundamental module for any collision avoidance system. This module is used to forecast the ships’ trajectories, and based on it, conflict detection and resolution are considered. In addition, this module also predicts the ship response for any change in the actuator command. As the collision avoidance is more on ship manoeuvring, only the planner motion, i.e., surge, sway, and yaw, are considered in this study. However, a detail on the motion models with 6 Degrees of Freedom (DOF) can be found in [
5]. To predict the ship motion accurately, most researchers prefer to use the dynamic model in their proposed collision avoidance system by introducing the kinetics relations into a kinematic model. As most merchant ships are underactuated, some applications of dynamic model for collision avoidance systems can be found in the form of an underactuated model [
6,
7], where force is considered as an input or as a Mathematical Manoeuvring Groups (MMG) model [
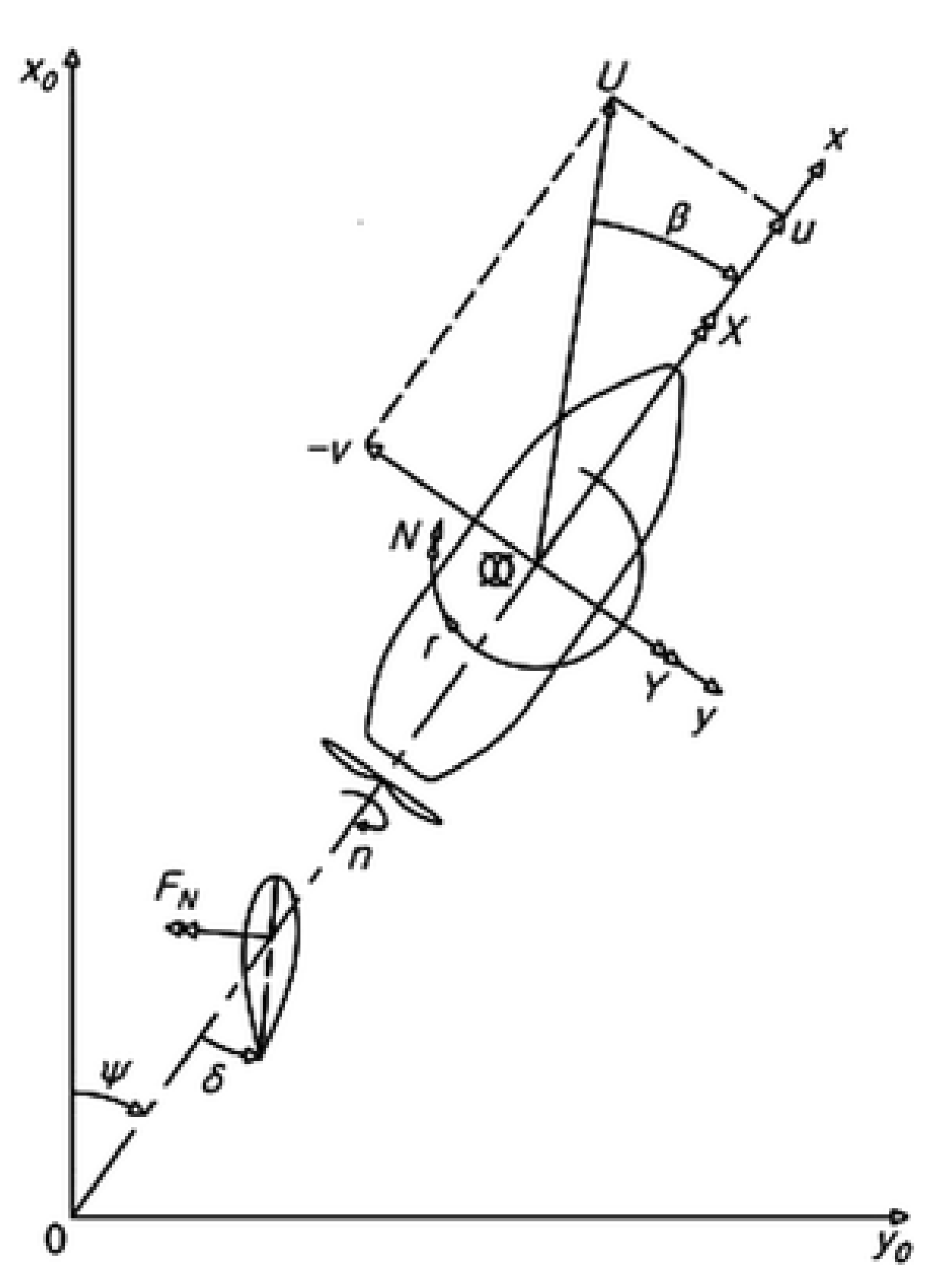
8], and the rudder angle and propeller revolution are considered as inputs to predict the ships’ manoeuvrability for distributed coordination. Since the ship dynamic models are complicated and the hydrodynamic coefficients are not readily available for different ships, this research employs a simplified dynamic model named as Nomoto model [
9] or ‘rudder to yaw response model’. The Nomoto model can describe a ship’s rate-of-turn response to any given rudder angle macroscopically and is good enough for predicting ship motion with negligible variance in surge motion. To consider the variation in surge motion, a separate speed response equation is considered in this research.
After confirming the motion prediction module, next comes the Conflict detection module. This module allows the OOW to know when the evasion action needs to take. Mainly, the module contains a collision risk assessment, which triggers an event that requires humans to take action to avoid a collision. Expert-based method is one of the methods mostly preferred by researchers for detecting collision, where experts’ knowledge is fully utilized to assess the collision risk. There are two ways to utilize expert knowledge-Collision Risk Index (CRI) and Ship Domain (SD). The most popular way to get the CRI is to use Distance to Closest Point of Approach (
DCPA) and Time to Closest Point of Approach (
TCPA). Different researchers used different strategies to get this CRI value from
DCPA and
TCPA, such as Fuzzy theory [
10], Probit regression [
11], etc. Some believe that only
DCPA and
TCPA are not enough to define the risk entirely. Thus, more risk indicators (RI) are introduced in different articles such as relative distance, relative bearing and coefficient K are proposed by Yingjun et al. [
12] for CRI calculation. On the other hand, Simsir et al. proposed ANN to use as a decision support system [
13] for ship position forecasting and collision detection, whereas Deep Reinforcement Learning (DRL) and Artificial Potential Field (APF) based path planning strategy unified with COLREGs rules is proposed by Li et al. [
14]. Few researchers have investigated the ship domain approach too, where the domain acts as a warning ring. More details of the ship domain can be found in [
15].
This paper prefers the expert-based method over the model-based method due to its wide acceptability among different researchers and adaptability to the humans’ performance onboard. The expert-based method can replicate the belief of a group of experts and allow experts to share their experiences. To utilize the experts’ knowledge, the authors opt for the popular Fuzzy Logic and measure the Collision Risk (CR) for each ship involved in an encounter. The Closest Point of Approach (CPA) has been chosen, but, unlike others, while deriving the membership functions, non-dimensionalised DCPA (DPCA′) and non-dimensionalised TCPA (TCPA′) are used, where DCPA is divided by the largest ship’s length in an encounter to consider the effect of the ship size, and TCPA is divided by the largest ship length and multiplied by relative speed to take the influence of ship speed into account. In addition, considering the fact that the challenge to overcome any ship conflicts depends on the number of ships involved in that encounter, the Fuzzy membership functions are normalized by using scale factor (SF), where the SF can be tuned based on the expert choice to alter the risk value if necessary.
Once the conflict is detected, the next step is to find a reliable solution to avoid collisions. This conflict resolution module is the core of any collision prevention system. Many methods have been developed so far by different researchers in this regard. The rule-based method is one of those where a set of pre-set rules is used to avoid collisions. Naeem et al. [
16] and Tam and Bucknall [
17] used pre-set course change method, while Fang et al. [
18] proposed to enlarge rudder angle until the trajectory is collision-free. Praczyk [
19] mentioned Neural Network (NN) as a suggestion tool for rule-complaint actions, while Perera et al. [
20] suggested Bayesian network for the same. The main advantage of this rule-based method is the COLREGs rules, and good seamanship can be treated in the rule system explicitly. However, many researchers believe that this cannot enumerate all the scenarios of multiple ship encounters. The virtual vector field method is another method where Artificial Potential Field (APF) [
21,
22] generates the repulsive potential around the obstacles and attractive potential to the destination. However, while using this method, the ship might trap in local minima, and ships’ dynamics are not taken fully into account. Discretizing the solution-space of the ship and choose the safest collision-free path with fixed control inputs is another way to resolve the ship conflicts issues. Benjamin [
23] used optimization to get such collision-free solutions, while Szlapczynski [
24] incorporated the ship domain approach with this method to make it more realistic. This method could consider the ship dynamics, but the calculation of input is time-consuming.
In general, the rule-based methods are simple and easy to define the COLREGs rules explicitly. Therefore, for the conflict resolution module, this research proposes a Fuzzy-logic based decision-making platform. Unlike others, instead of taking the decision based only on Collison Risk (CR), encountering and relative angles of each ship measured from others are also considered, and the corresponding membership functions are derived. This allows the system to consider all possible types of encounters and take decisions accordingly. COLREGs compliant rules are then implemented in the Fuzzy platform to take more realistic actions to avoid ship collision. To deal with multiple ship encounter, this paper proposes a simple but effective approach where each ship compares its evasive actions to avoid other existing ships, and the maximum-course and minimum-speed change approach is chosen in the decision-making process. By considering this approach, a ship would be able to satisfy all course changing requirements to avoid other ships. The ship also sacrifices its speed for a minimum time, allowing her to maintain its manoeuvrability while changing course. A conventional PD controller is then used to execute the command for course changing manoeuvre to take the appropriate rudder. The coefficients in the controller are tuned for each ship to ensure the minimum overshoot and less settle time. On the other hand, the speed change is considered by using a speed response equation. The information flow among the modules for the proposed collision avoidance system is given in
Figure 1.
Simulations are done to justify the effectiveness of this novel collision avoidance system, and the ships are tested to avoid collisions in 22 complex scenarios named Imazu problem [
25]. Some rather difficult situations of five ship encounters are also investigated, and the results are included in this paper. This paper is organized as follows:
Section 2 explains the marine traffic rules and regulations and their importance in navigation.
Section 3 includes a brief description of the mathematical model used for motion prediction. In
Section 4, the Fuzzy-based conflict detection module is explained.
Section 5 explains the core of the avoidance system, i.e., conflict resolution module for multiple ship encounters, and its execution.
Section 6 shows the simulation results for the Imazu problems and other complex encountering situations. Finally,
Section 7 concludes the overall findings and proposes some future works.
2. Marine Traffic Rules and Regulation
In marine traffic, all ships should abide by certain laws while trying to avoid collisions. These laws are formulated by International Maritime Organization (IMO) in 1972 and named International Regulations for Preventing Collisions at Sea (COLREGs). This 1972 convention [
4] was designed to update and replace the Collision Regulations of 1960. The COLREGS includes 41 rules divided into six categories, which are: Part A (General), Part B (Steering and Sailing), Part C (Lights and Shapes), Part D (Sound and Light signals), Part E (Exemptions), and Part F (Verification of compliance with the provisions of the Convention). There are also four Annexes containing technical requirements concerning lights, sound signalling appliances, and additional signals for finishing vessels and international distress signals. However, this paper focuses only on Part B (Steering and sailing).
It is a matter of fact that several studies on ship collision avoidance systems have considered the COLREGs rule in their algorithm [
26,
27] and several ignore these completely [
13]. A system ignoring the COLREGs rules might successfully avoid ship collisions. However, as the actions suggested by the resolution module violate the laws at sea, these are not acceptable in real practice. Statistics [
28] reveal that 56% of major maritime collisions occur due to the violation of COLREGS rules. Therefore, it is crucial to choose an appropriate method for the collision avoidance system, which can incorporate the given rules appropriately. The terms ‘Give way’ and ‘Stand on’ ship are frequently used in the rules. According to the COLREGs, ships coming from starboard side are referred as ‘Stand on’ ship and have a higher priority for navigation. Thus, most of the time, the ‘Stand on’ ship keeps its original course and speed without any alteration. On the other hand, the ship coming from the port side is termed as ‘Give way’ ship. ‘Give way’ ship has less priority for navigator, and thus takes necessary actions to avoid the ‘Stand on’ ship.
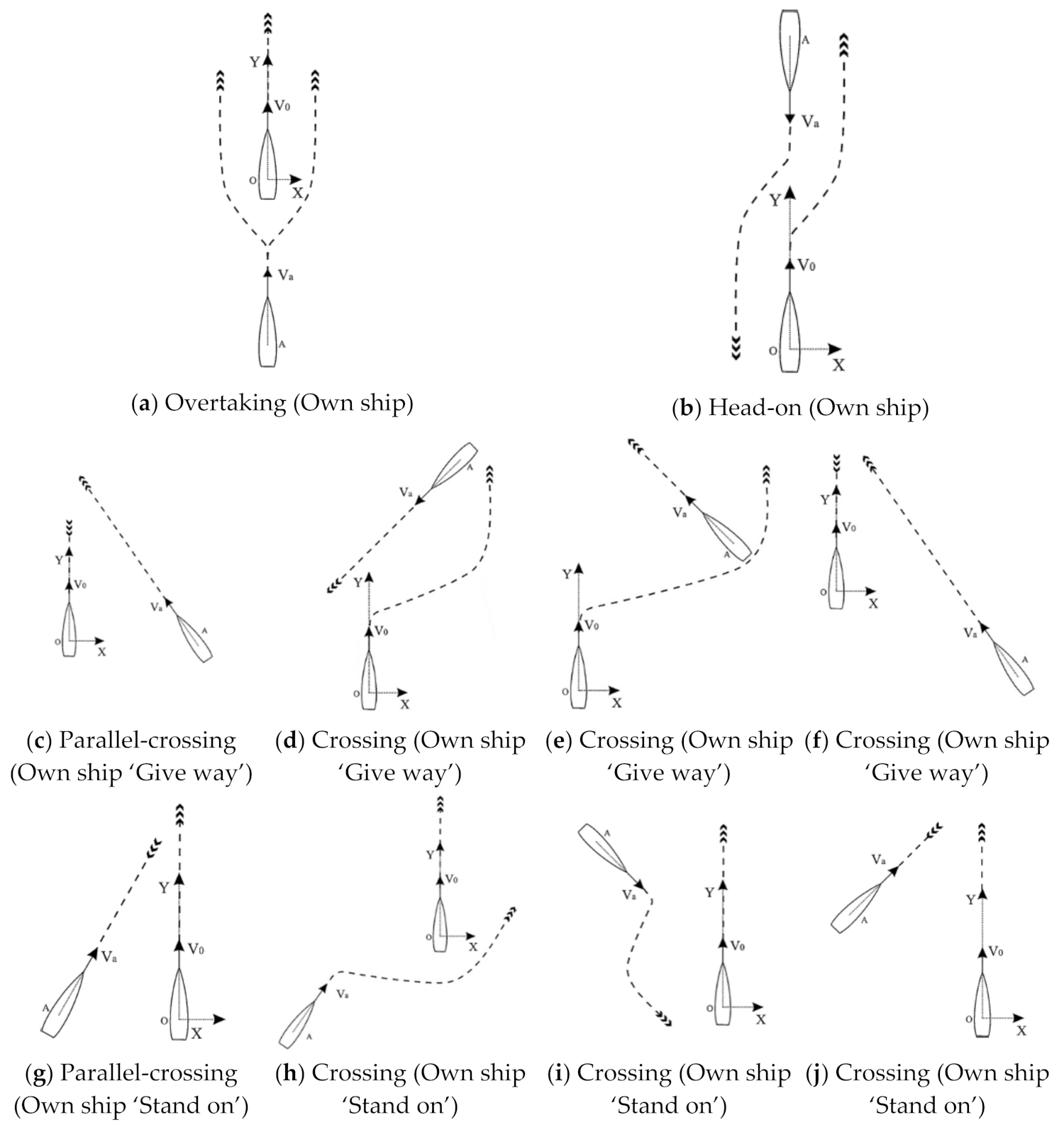
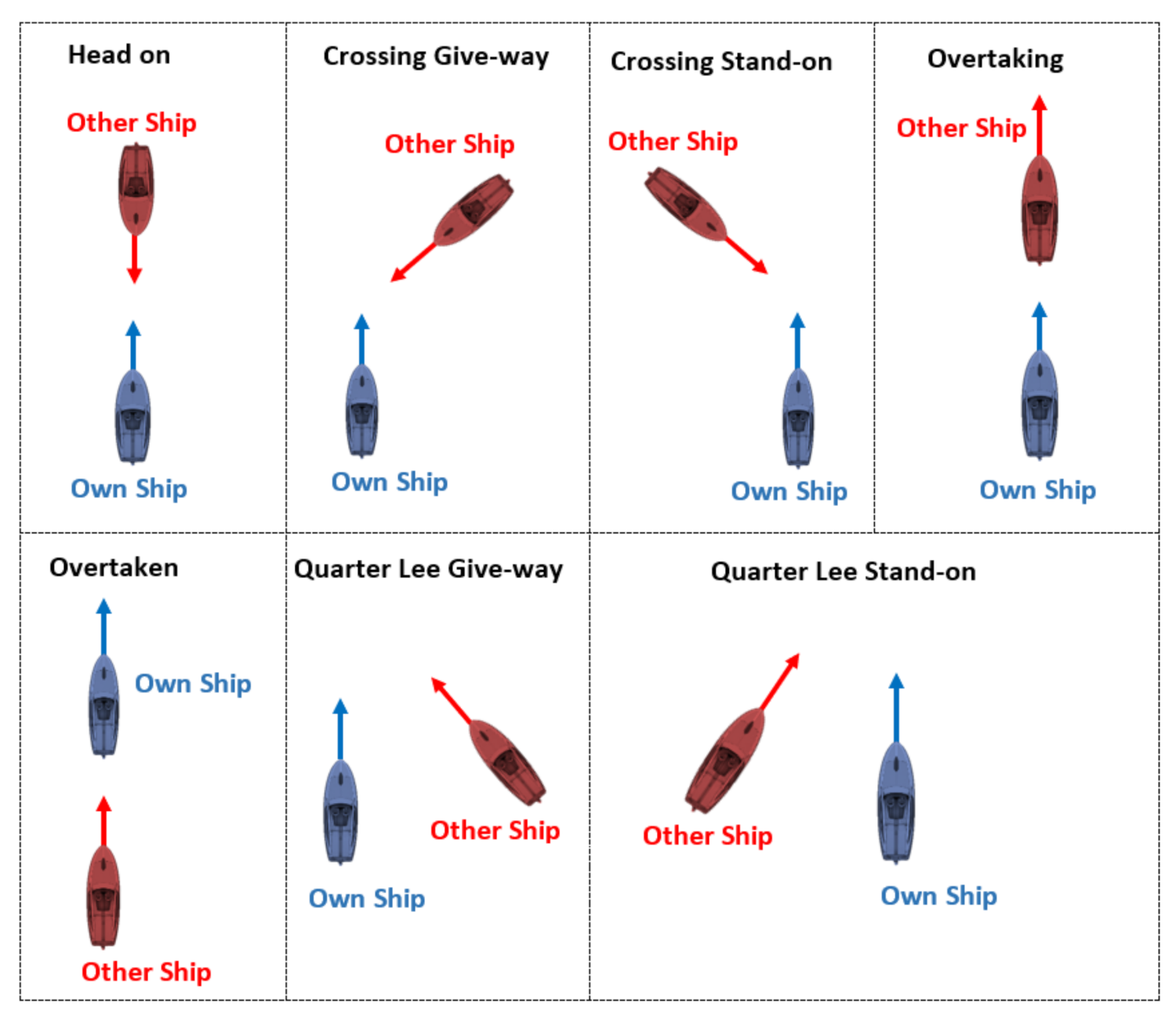
Maintaining a safe distance among the ships in marine traffic is paramount to enhance maritime safety. Therefore, COLREGs [rule 13(a)] emphasizes specifically maintaining a safe distance between two ships in overtaking and head-on situation. Such encountering situations are demonstrated in
Figure 2a,b. Crossing an encounter of two ships is another situation that involves high risk. For this type of encounter, COLREGs mention the ships should take early actions to avoid situations of crossing ahead with the risk of collision in starboard to starboard and must be passing by port to port. Different crossing situations are mentioned in the COLREGs (rule 15).
Figure 2c–f illustrates the crossing situations where the own ship is in a ‘Give way’ situation, whereas in
Figure 2g–j, in ‘Stand on’ situation.
Although a ‘Stand on’ ship is believed not to take any action to avoid a collision, the statement is not always true. COLREGs rule 17(b) mentions that: “When, from any cause, the vessel required to keep her course and speed finds herself so close that collision cannot be avoided by the action of the “Give way” vessel alone, she shall take such action as will best aid to avoid a collision.” This means that if the ‘Give way’ ship does not take any appropriate actions to avoid the collision as required by the COLREGs rules, the ‘Stand on’ ship is forced to take appropriate actions to avoid a collision.
However, the actions taken by the ‘Stand on’ ship must be carefully formulated as there are no specific rules on it. In addition, COLREGs rule 8(b) mentions that: “Any alteration of course and/or speed to avoid collision shall if the circumstances of the case admit, be large enough to be readily apparent to another vessel observing visually or by radar; a succession of small alterations of course and/or speed should be avoided.” This rule highlights that the ship course and/or speed change in ocean navigation must be executed to avoid collision situations at any cost, and the action must be distinguishable by other ships.
Although these COLREGs rules are established in 1972, some issues hinder the practical implementation of the rules in ocean navigation. For example, all the rules are explained for two ship encounters. Therefore, in a multiple ship encounter, when a particular ship becomes both ‘Give way’ and ‘Stand on’ ship at the same time (when two other ships are approaching from its port and starboard side), COLREGs cannot give a solution. Additionally, when the ‘target ship’ (the ship that must be avoided in an encountering situation) has a very low or high speed compared to the ‘own ship’ (the ship that needs to take action to avoid the target ship), the rules become questionable. Therefore, in addition to the COLREGs rules, experts’ knowledge also needs to be considered to take the appropriate decision. Hence, this study proposes Fuzzy-logic based collision avoidance system, in which not only ‘Give way’ ships but ‘Stand on’ ships also take action if the risk becomes too high or unbearable.
4. Module for Ship Conflict Detection
Either in a manned ship or unmanned ship, one essential module of a collision avoidance system is the conflict detection module, which assesses the collision risk and alerts the system to take evasive actions. This conflict detection module mostly assesses the risk based on answering the following three questions:
Question 1: Who are the potential threats in an encounter? (Detect the collision candidates)
Question 2: How far are the threats to collide? (Measure the distance to collide)
Question 3: At what time will they collide? (Measure the time to collide)
Many measures have been developed to answer the above questions. However, the Closest Point of Approach (
CPA) concept is the most widely used approach both in the maritime and aviation industries [
33]. In this CPA approach, two widely used indicators are Distance to
CPA (
DCPA) and Time to CPA (
TCPA). The measure of
DCPA answers Question 2, whereas
TCPA answers Question 3. However, to get the answer to Question 1, different researchers proposed different strategies that utilities the values of
DCPA and
TCPA.
4.1. Selection of Risk Indicators for the Module
This research prefers the CPA approach to assess the risk. There are two major alternative methods available in this regard—model-based method and expert-based method—and this research opts for the latter due to its wide acceptability. Some researchers believed that solely
DCPA and TPCA vales are not enough to calculate the risk, and, therefore, they have mentioned different risk indicators (RIs) [
12]. Several studies carefully examine the other possible RIs to calculate the CR in a more realistic way and found that the ship length and relative speed are the most impactful parameters that can alter the CR drastically if not being considered while measuring the risk. Other parameters, such as relative angle, encountering angle, etc. are useful for decision-making process, not for CR measurement.
In this research, instead of treating the ship length, relative speed, DCPA, and TCPA independently while measuring the risk of ships in an encounter, nondimensional DCPA (DCPA′) and nondimensional TCPA (TCPA′) are used. In the nondimensional forms, the DCPA is divided by the maximum ship length in an encounter, and the TCPA is divided by the maximum ship length and multiplied by relative ship speed. This approach not only reduces the number of variables but also allows the module to fine-tune the risk measurement, especially for larger vessels.
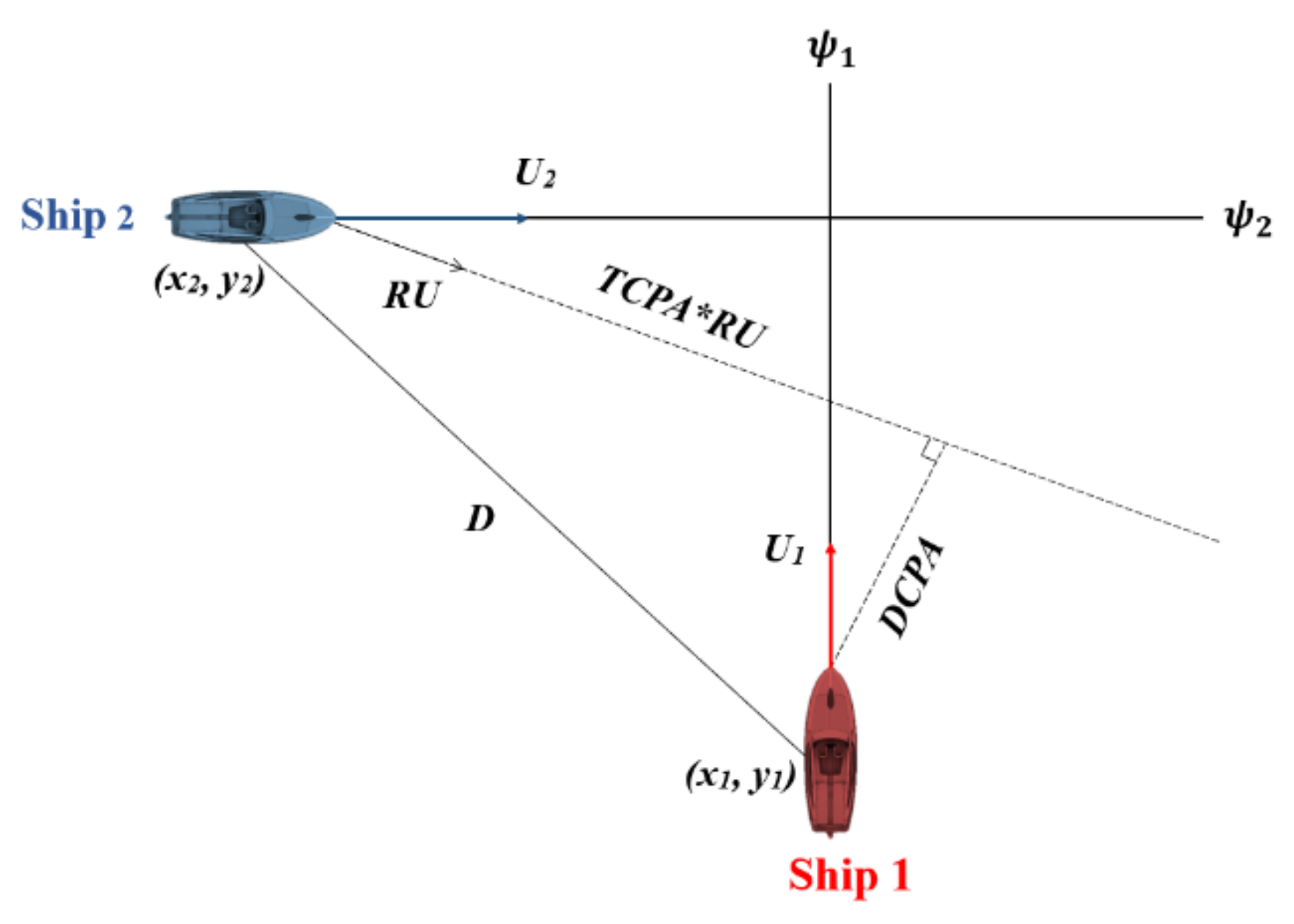
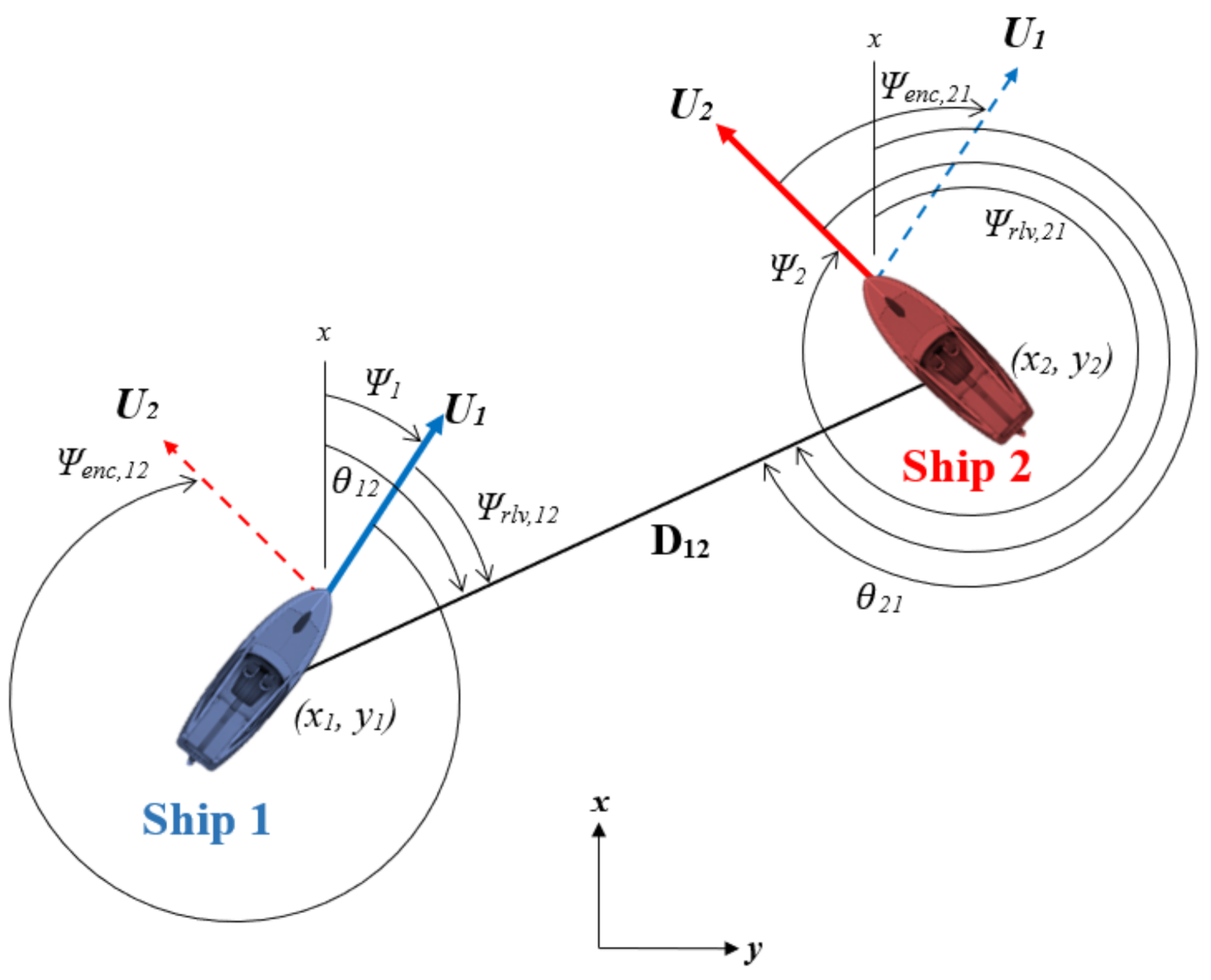
Figure 4 illustrates a two-ship encounter to help understand the
DCPA and
TCPA concept and their calculations, where
U1,
U2 are ship velocities,
are ship headings, (
x1,
y1), (
x2,
y2) are ship positions, D is the distance between the centroid of two ships, and RV is the relative velocity.
The values of
DCPA and
TCPA are directly related to the ship’s position, velocity, and course. If these values are known accurately, the following equations are used to calculate
TCPA and
DCPA.
The
TCPA and
DCPA are non-dimensionalised using the following equations where the largest ship size is considered in the denominator. By doing so, the
and
can be tuned, and so as the collision risk based on the largest ship size in any particular encounter. Otherwise, the system would consider the same risk for a ship when it meets ships of different sizes, which are not realistic.
These and are dynamic and are always updated with the ship states. It is also mentioned that once a ship passes its CPA, turns to a negative value.
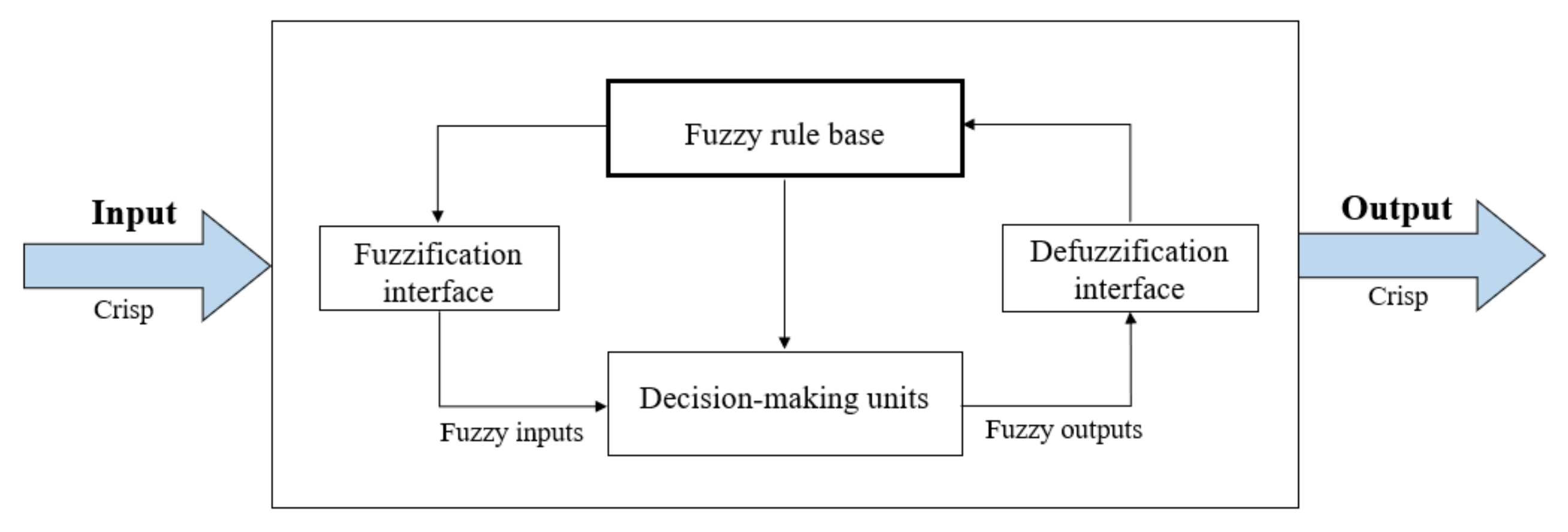
4.2. Fuzzy Inference System (FIS) to Measure CR
Fuzzy logic is a widely known method for decision making purposes [
34,
35]. Due to its ability to deal with the imprecision, i.e., uncertainly of human nature, and describe a system linguistically through rule statements, it gains its huge popularity. Fuzzy inference system (FIS) usually consists of four major components, which are: fuzzification of crisp inputs, construction of fuzzy rules, implementation of rules to get the fuzzy result, and at last, defuzzification of fuzzy result into a crisp output. This research uses the FIS to measures the CR for any given ship conflict.
Figure 5 shows the framework of this system for better understanding. A detail of its four components is given in the following sub-sections.
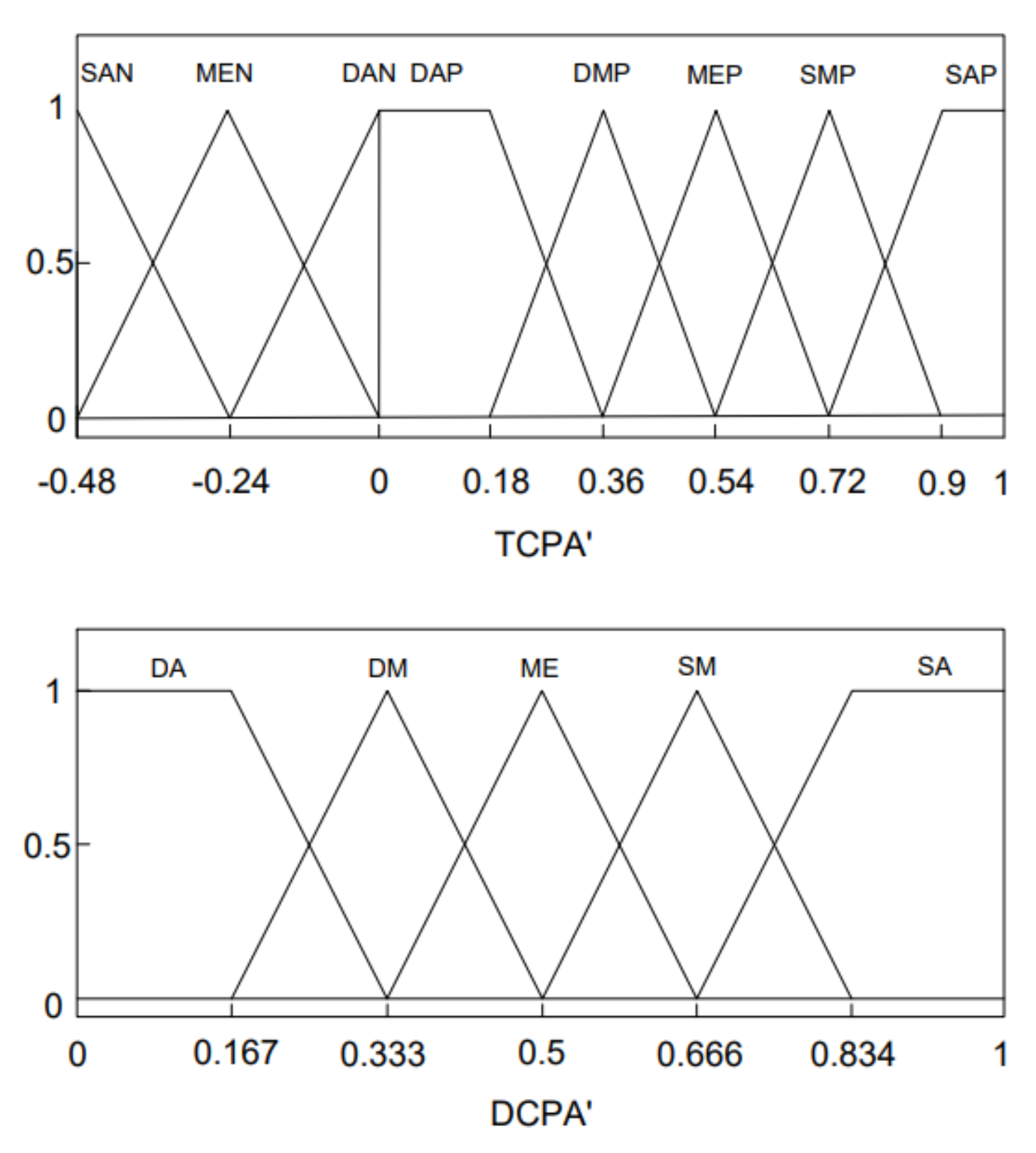
4.2.1. The Fuzzification Interface
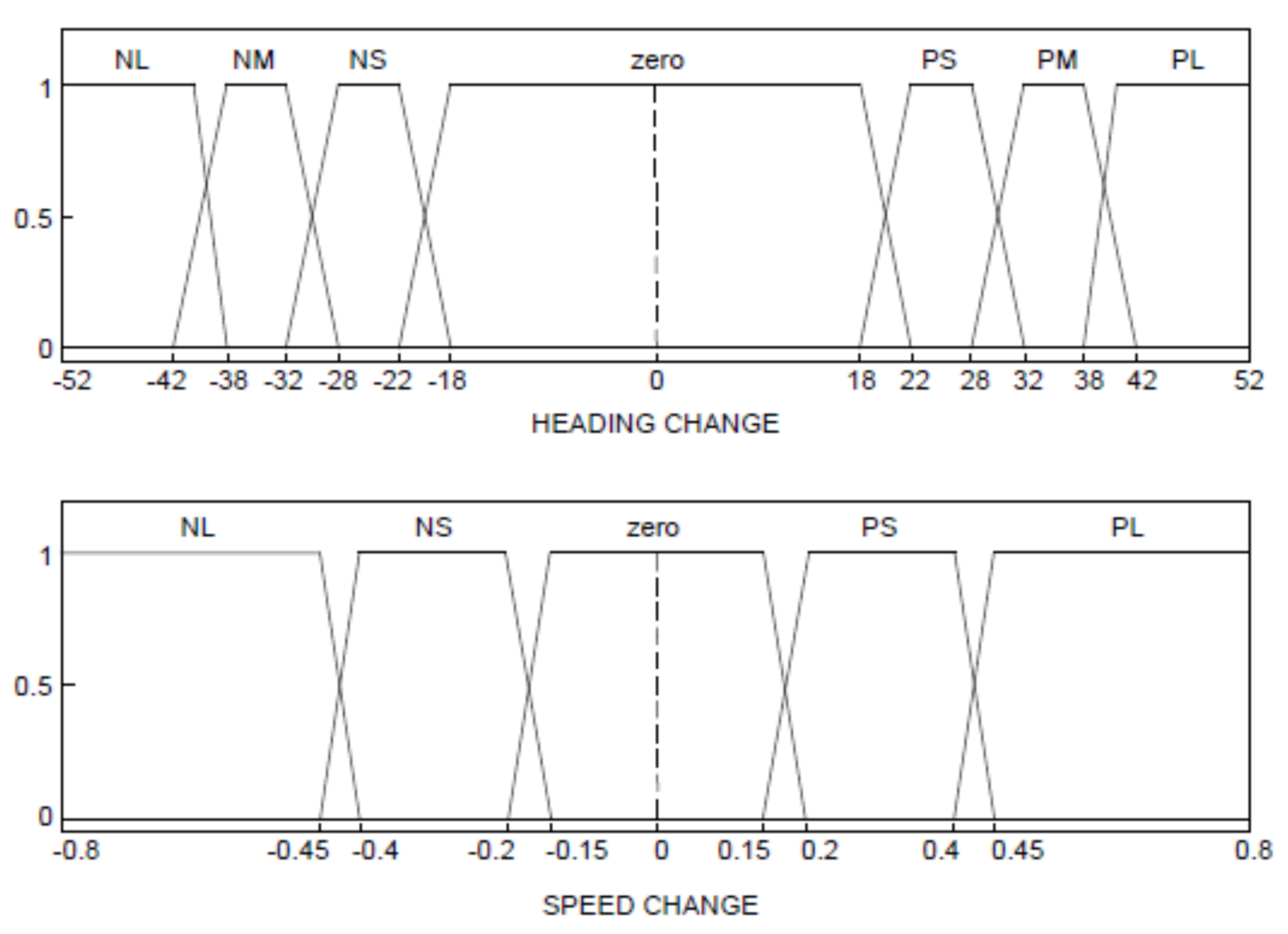
The main task of this interface is to map the crisp inputs from 0 to 1 by using a set of membership functions. Here, and are considered as two crisp inputs. Four and eight linguistic variables are considered and mapped carefully for and , respectively. The linguistics values used for are DA (danger advance), DM (danger medium), ME (medium), SM (safe medium), and SA (safe advance), and for are SAN (safe advance negative), MEN (medium negative), DAN (danger advance negative), DAP (danger advance positive), DMP (danger medium positive), MEP (medium positive), SMP (safe medium positive), and SAP (safe advance positive). For a fixed set of membership functions and a given set of inputs, the system is then designed to calculate the CR as per defined rules. The rules are prepared based on expert knowledge, which is, if and are small, CR is big, and vice versa. However, it is believed that CR should be higher for the same set of and , if the encountering situation involved more than two ships. Therefore, an adaptive membership function is necessary to consider the effect of different numbers of ships in an encounter. In this regard, this study considers the scale factor (SF) to normalise the maximum value of the mapping. The user can tune this SF value as per need. Usually, for a higher number of ships encounter, an increase in SF value results in a higher value of CR, thus raising the level of awareness of the situation.
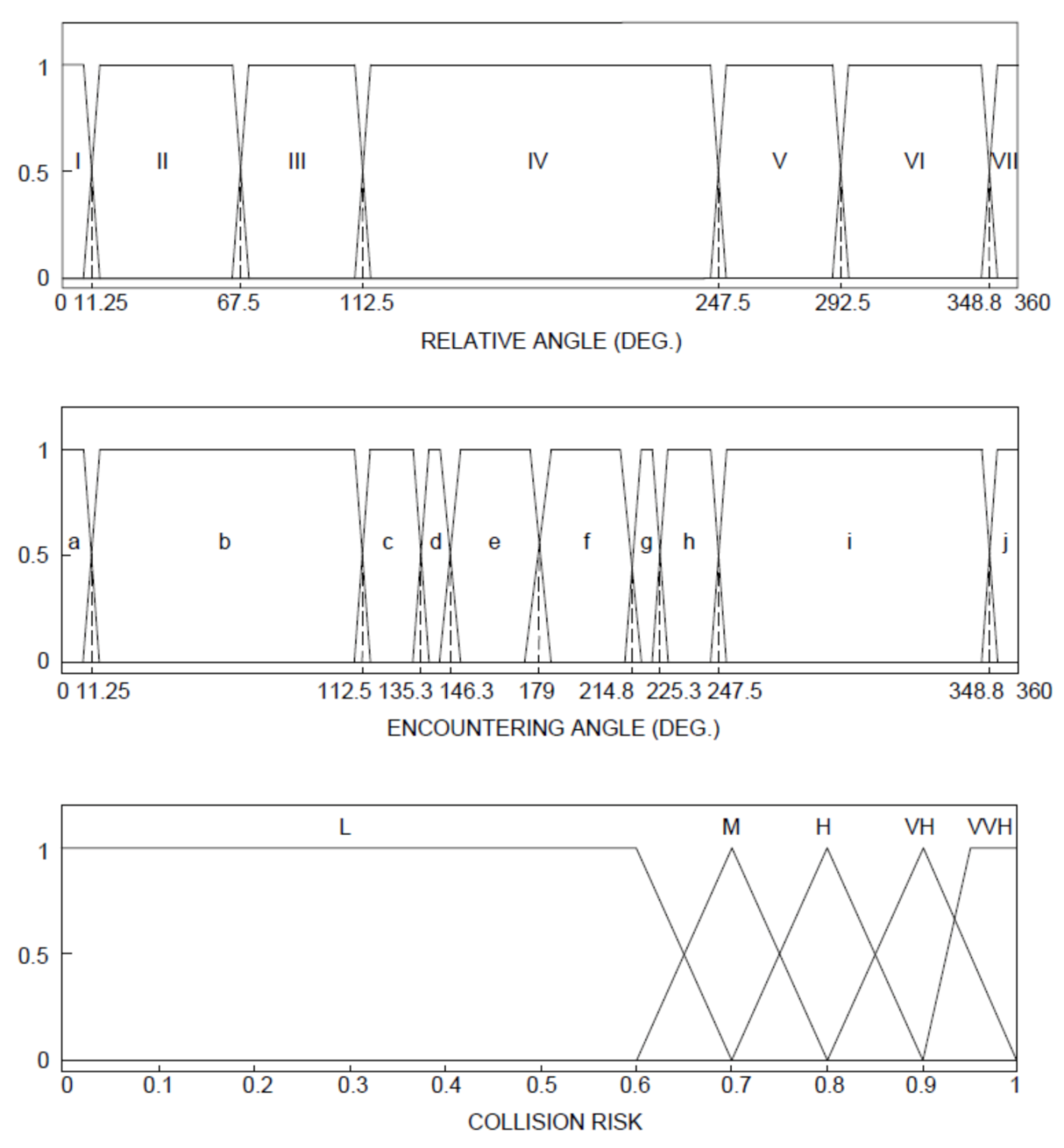
MATLAB Fuzzy Toolbox is used to create the memberships for
and
as shown in
Figure 6.
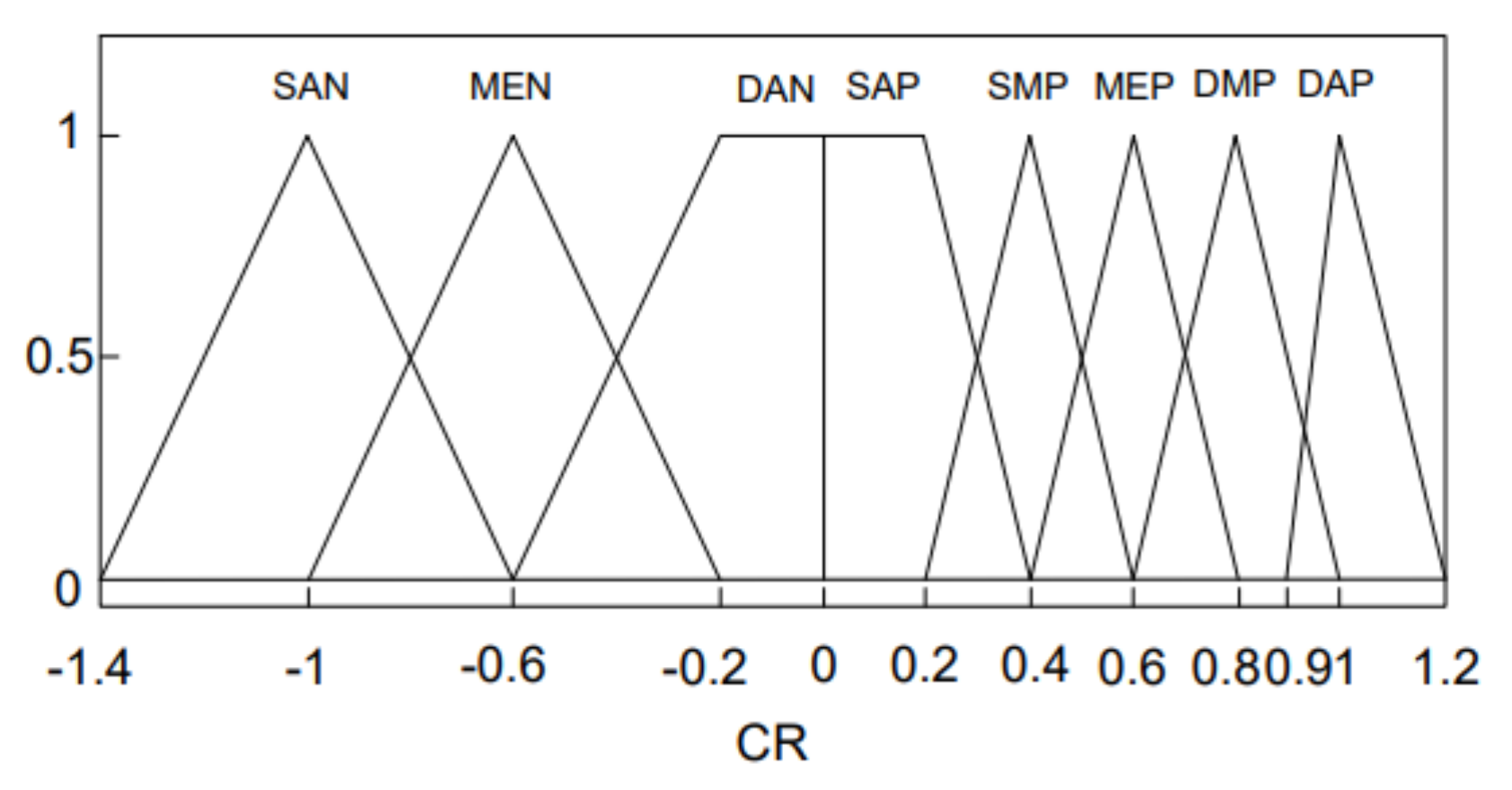
For the output, eight linguistic variables are considered and mapped for CR. The negative value of CR means that the risk has just passed, whereas zero means no risk and 1 means the highest risk.
Figure 7 shows the membership function used for measuring CR.
The membership function for CR is used for defuzzification, i.e., to convert the fuzzy output to a crisp output.
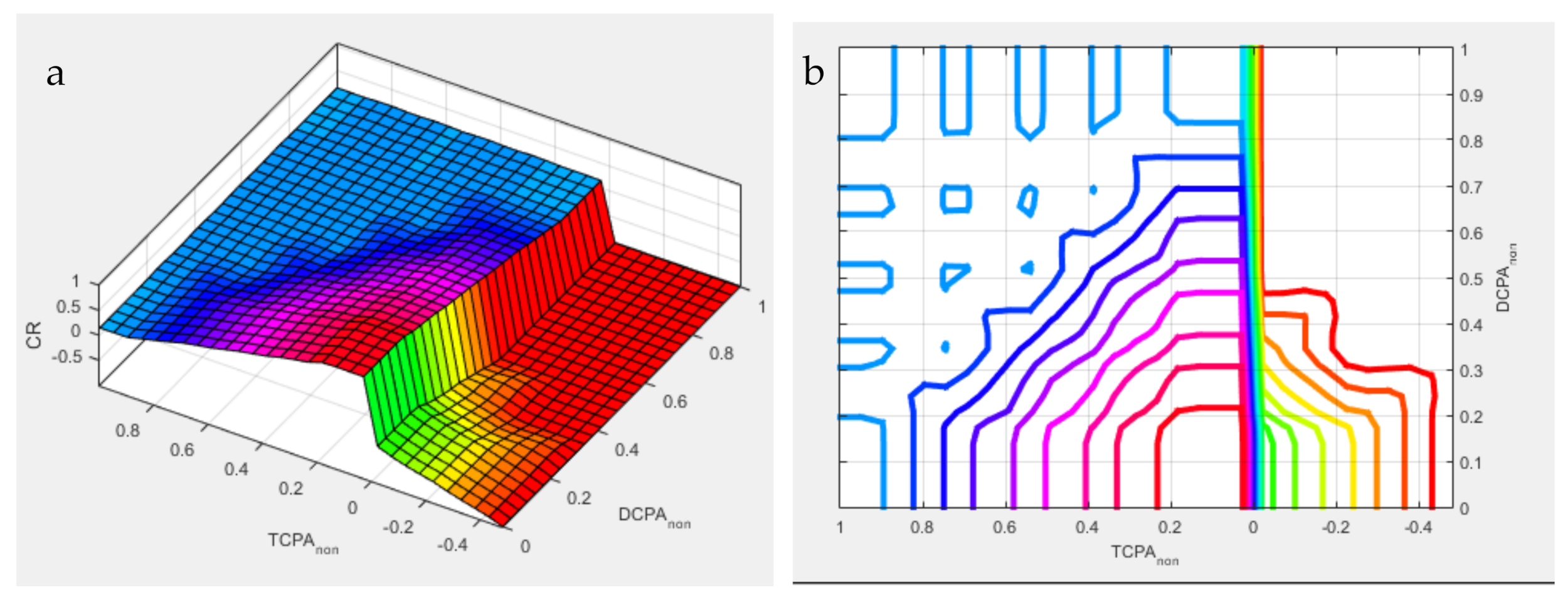
4.2.2. Fuzzy Rule Base
A series of linguistic statements or rules are defined in the FIS system to calculate the CR based on
and
. In order to reason the value of CR, the fuzzy rules are expressed in the form of IF-THEN to describe the relationships between the inputs and output. The rules are defined in the MATLAB Fuzzy Toolbox platform and shown in
Table 2.
A 3D surface plot of the rules is shown on the left side of
Figure 8, which indicates that CR is high when the
and
are small. Additionally, the right side of
Figure 8 demonstrates the contour map for rules.
4.2.3. Decision Making Units
There are two widely known inference methods in the FIS. These are Mamdani’s fuzzy inference method and Takagi-Sugeno’s fuzzy inference method. The first two parts of the Mamdani and Sugeno type FIS, i.e., fuzzifying the inputs and applying the fuzzy rules, are exactly the same. The main difference between these two FISs is that Sugeno output membership functions are either linear or constant. On the other hand, in Mamdani FIS, the output of each rule can be a fuzzy logic set. Thus, the Mamdani type is intuitive and well suited to human input. Therefore, Mamdani type is adopted in this research as this study involves human experience sharing for collision risk calculation.
4.2.4. Defuzzification Interface
Defuzzification is needed for Mamdani type FIS. This is the step to convert the fuzzy output to a crisp output. MATLAB Fuzzy logic toolbox supports five built-in methods for the defuzzification process. These are Centroid, Bisector, Middle of Maximum (MOM), Smallest of Maximum (SOM), and Largest of Maximum (LOM). This study chooses centroid defuzzification method that returns the centre of gravity of the fuzzy set along x-axis. The centroid is computed using the following formula
where
is the membership value for point
in the universe of discourse.
6. Results and Discussion
The integrity of the developed modules for the proposed collision avoidance system is tested for ships in different encountering situations. Initially, two ship encountering situations are examined. Following that, the system is tested for a maximum of five ship encounters. The proposed system is also investigated for different ships with different manoeuvring characteristics, ship size, and speed. Finally, Imuzu-proposed 22-cases [
25] are taken into account to analyse the complex situations, and collision avoidance for each case is successfully demonstrated.
6.1. Integrity Check for All Modules
A sample two-ship encounter simulation is considered to check the integrity of all modules, i.e., how the modules all work together within the proposed collision avoidance system. In this study, for two ship encounters, the scale factors (SFs) for and are considered as 20 and 180, respectively. These SFs can alter the degree of risk considered by the system for a given condition, thus controlling the timing to initiate the evasion actions in the conflict resolution module. In addition, these SFs can also help the OOW to decide the minimum safety distance that he would like to consider while passing other ships. To get these SFs optimally could be a future scope of this research. However, for simplicity, at this stage, the factors are tuned manually to ensure all ships with different sizes could avoid each other with some reasonable safety margin, which is higher for big ships, and vice versa.
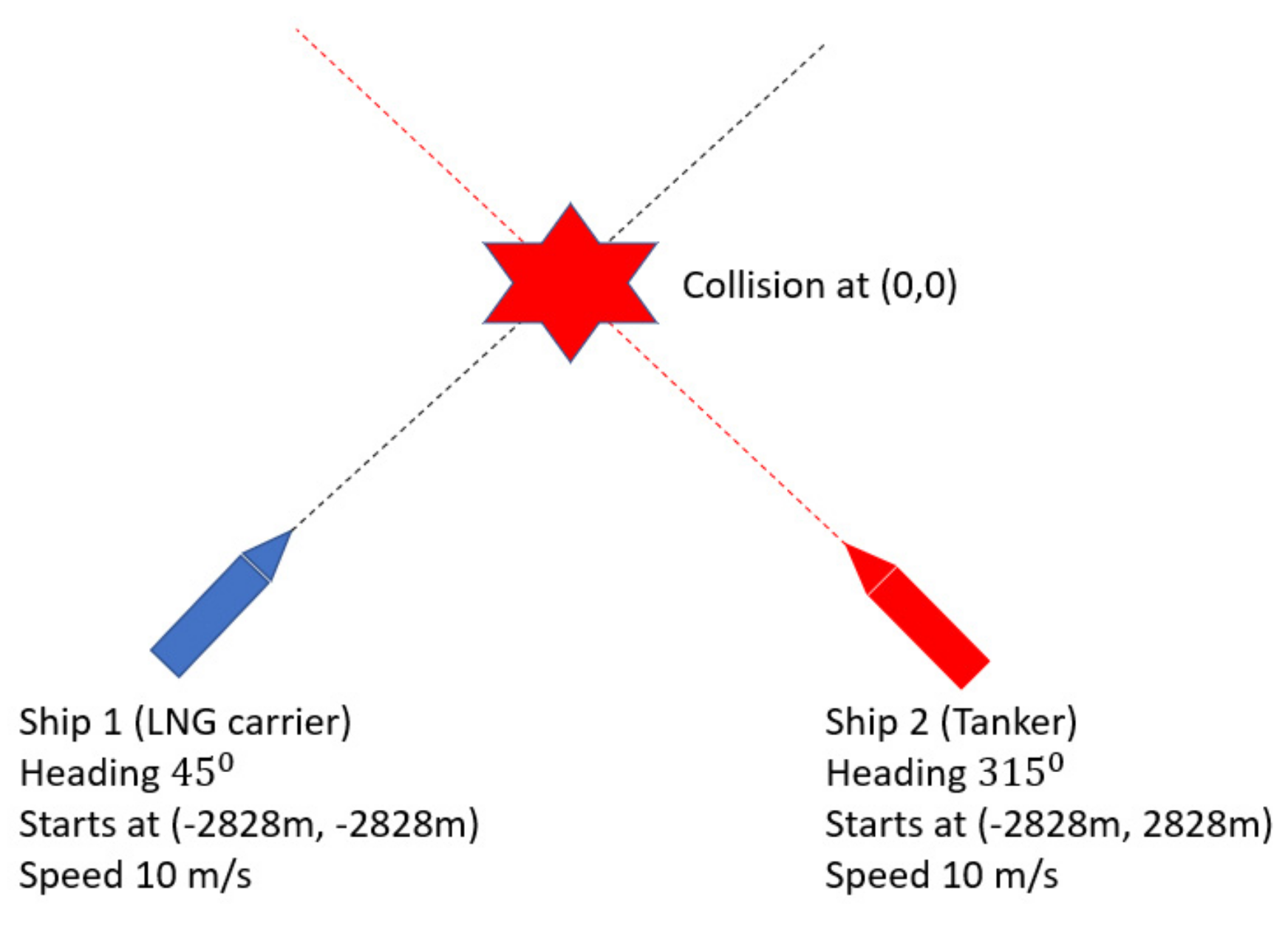
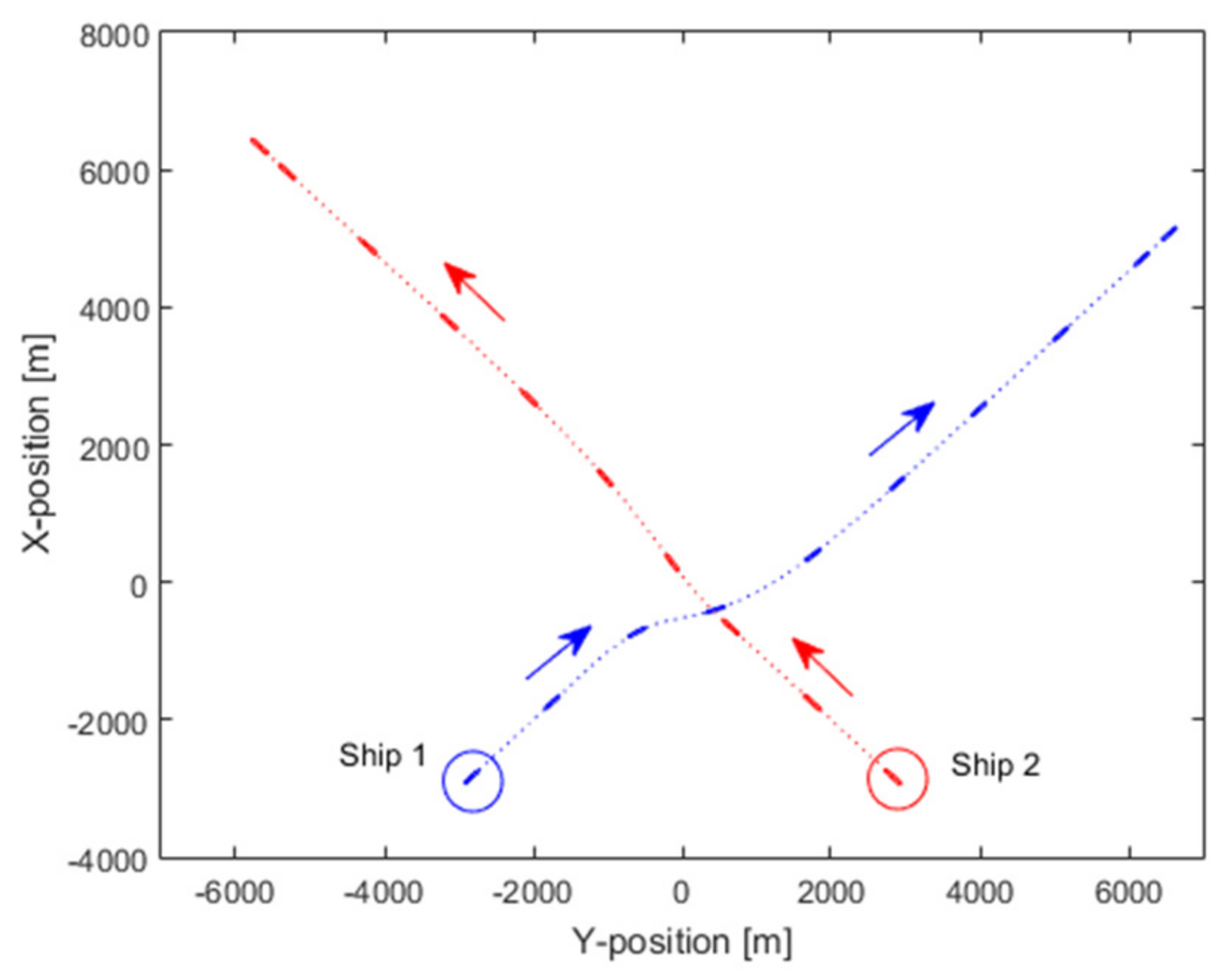
The system starts with a realization of the ships’ initial states, which are given as user inputs. Two ships, 270.11 m LNG carrier (noted as Ship 1) and 304.65 m Tanker (noted as Ship 2), are selected for a collision course as shown in
Figure 16. The initial headings and positions for these two ships are chosen to ensure a collision at (0, 0) point in the simulation domain if the ships are not taking any avoiding action. The simulation is then run for the aforementioned two ship encounter, and a successful demonstration of the avoiding action is illustrated in
Figure 17, where the ships are plotted at a 300 s timestamp.
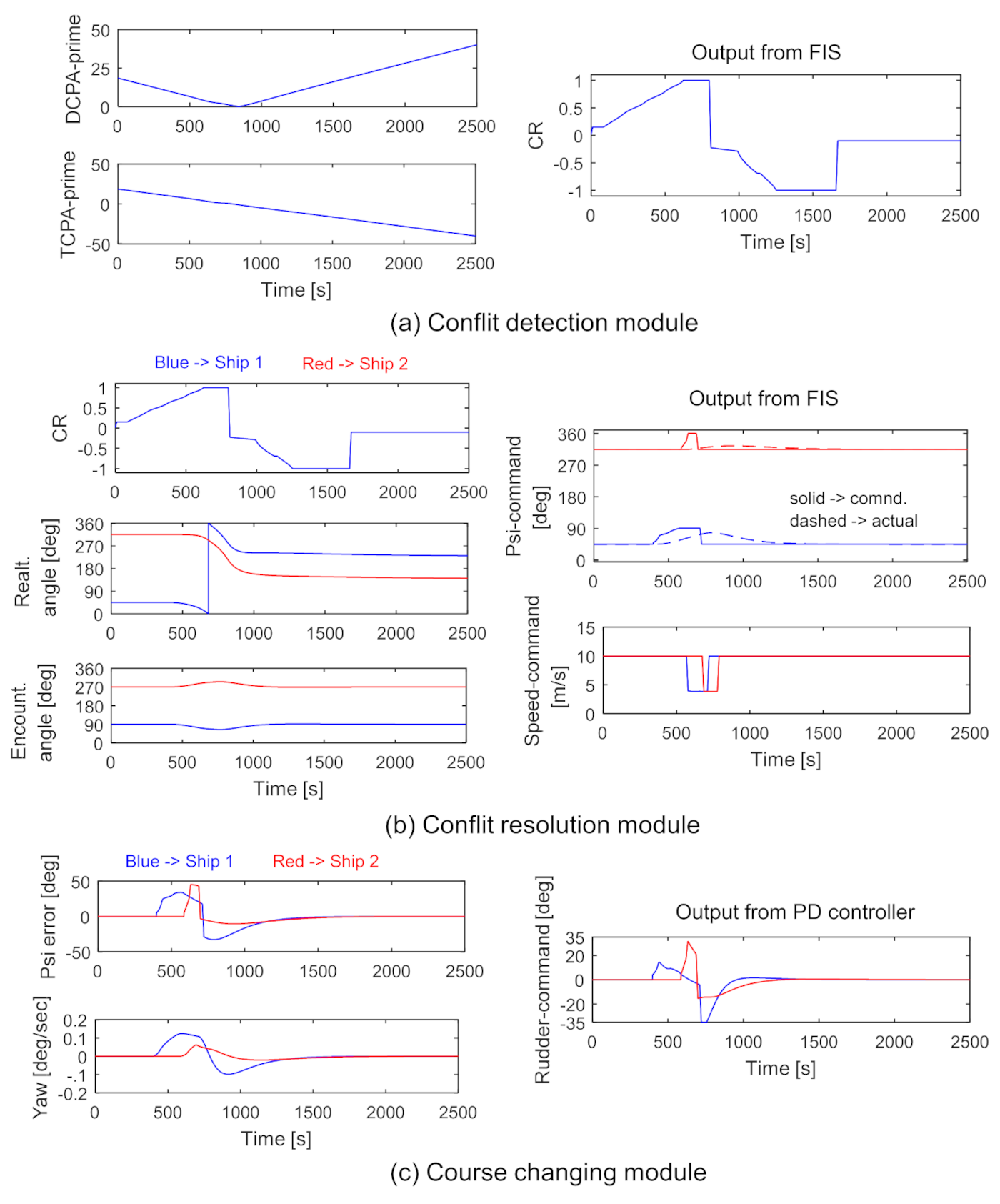
Figure 18 presents a detail of various inputs and outputs of different modules to know how the module works within the system. Here,
and
are calculated within the conflict detention module based on the user-defined initial conditions. These values are then scaled according to the scale factors, which is 20 for
and 180 for
for two-ship encounters. These scaled values are mapped to the
and
fuzzy membership function within the FIS, and the CR is calculated accordingly based on the defined rules.
Figure 17 shows that the initial risk (CR) is 0.01 as the ships are quite far from each other. This CR and the calculated relative and encountering angle of each ship are then fed to the conflict resolution module for decision making process. Here, while taking the decision, CR is the same for both ships. However, the relative and encountering angle of ship 2 measured from ship 1 are
and
, whereas the same for ship 1 measured from ship 2 are
and
. By this way, the FIS could detect the give-way and stand-on ship and take the decision according to the COLREGs rules. In this case, ship 1 is a give way ship, whereas ship 2 is a stand on. Initially, when the CR is very low, no action is taken by the system for ship 1. However, when the CR gradually increases to 0.65, at 399 s, the module starts to order heading-change to starboard side. It starts with an angle calculated by FIS, which is updated up to
(initial +
) later as the CR reaches 0.89. It is mentioned that even though the system commands a particular heading for different ships, the actual heading for the same command would be different for different ships. It is usual that a big ship responds slower than a small ship due to its large mass, i.e., greater inertia force. It also depends on ships’ manoeuvring characteristic. The command heading and the actual heading are plotted together in
Figure 18 to understand the differences. In the case of ship 1, although the course changing command is set to
, the actual course change is
and there is a time lag to attain that course. Now, after the
course command for ship 1, as the CR kept increasing, the module considers it as an extremely high-risk situation and initiates the speed reduction command at 570 s when the CR is 0.90. As the CR kept increasing even after these actions, the system finally commands the stand on ship (Ship 2) to alter its curse to
(initial+
) and decreases its speed at a later stage. In this avoiding process, the actual course change for ship 2 was only
due to its large inertia force. Finally, both ships avoid each other at 814 s with a safety margin of 498 m.
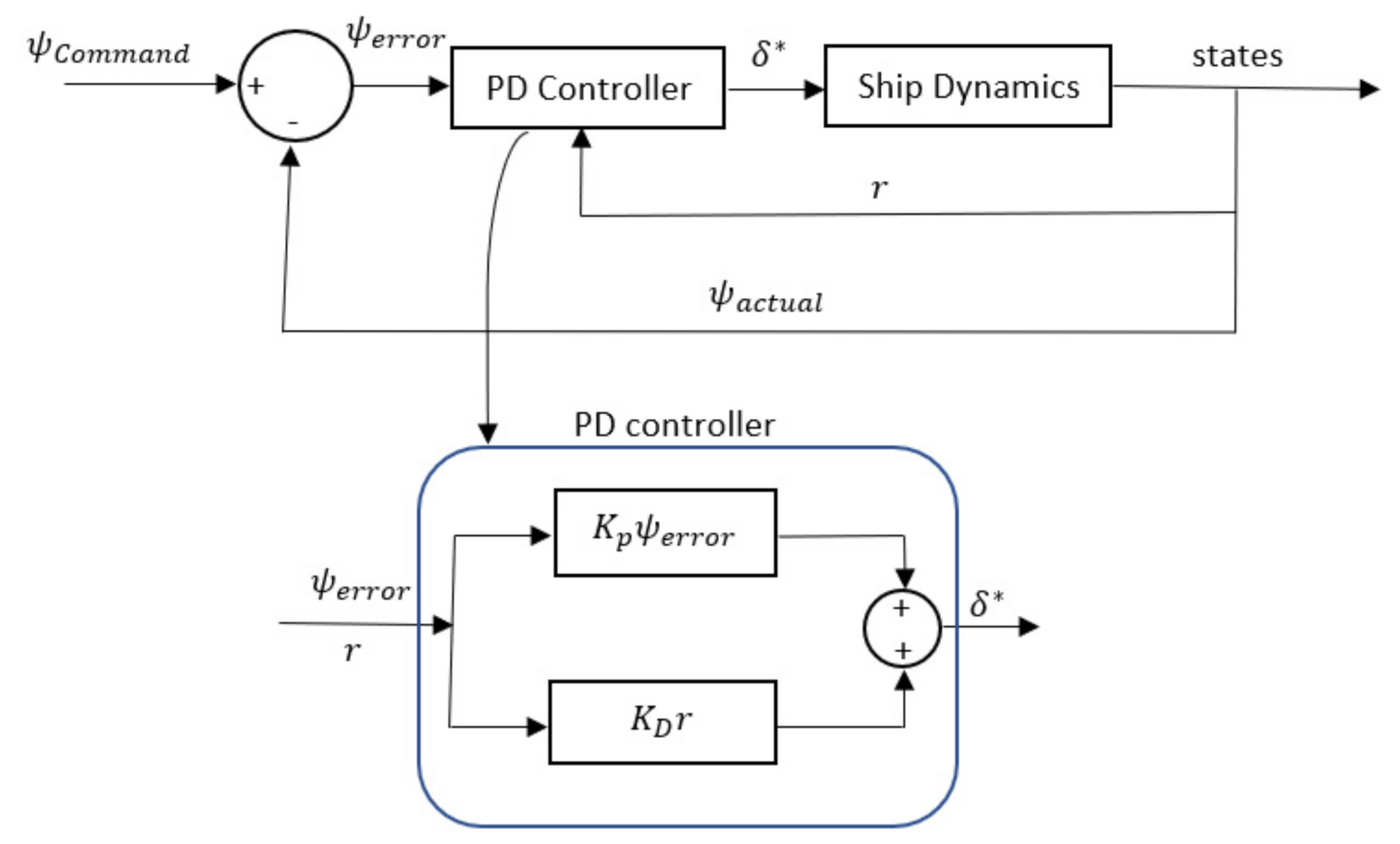
During the course alteration, as mentioned in
Section 5.5., PD controller is used. The heading error and the yaw rate of each ship are fed into the controller, and the rudder command angle is calculated to put it as an input for the motion prediction module. A simple demonstration of this module is also shown at the lower part of
Figure 18, where
rudder is considered as a max-min limit for the controller to take.
6.2. Verifying the System for Different Ship Types and Speeds
Two ship encountering situations are considered at the initial stage of this study to judge the feasibility of the proposed collision avoiding system. The verification is done on how the system copes with different types of ships and their corresponding speeds. Most of the published articles on collision avoidance systems concluded their work based on their preferred ship types. They barely judge their systems for different ship types and speeds. Therefore, this study would like to take the opportunity to check how the system reacts for different ship types and speeds.
6.2.1. The Proposed System for Different Ship Types
There are 20 different ships considered in this study, as shown in
Table 1. This ranges from 43.26 m (Harbour tug) to 409.59 m (Tanker). Three different cases are investigated for different ship types, while the initial speeds, headings, and positions are kept the same.
Table 4 lists up the details of the ships considered in these three case studies.
Although the ships are started from the same initial states in the three cases, the CRs are expected to be calculated differently by the conflict resolution module due to different ship sizes. On the other hand, as these ships have different response rates, the conflict resolution module should also adjust the evasive actions taken by the ships depending on their dynamic response.
Figure 19,
Figure 20 and
Figure 21 illustrates these three cases mentioned in
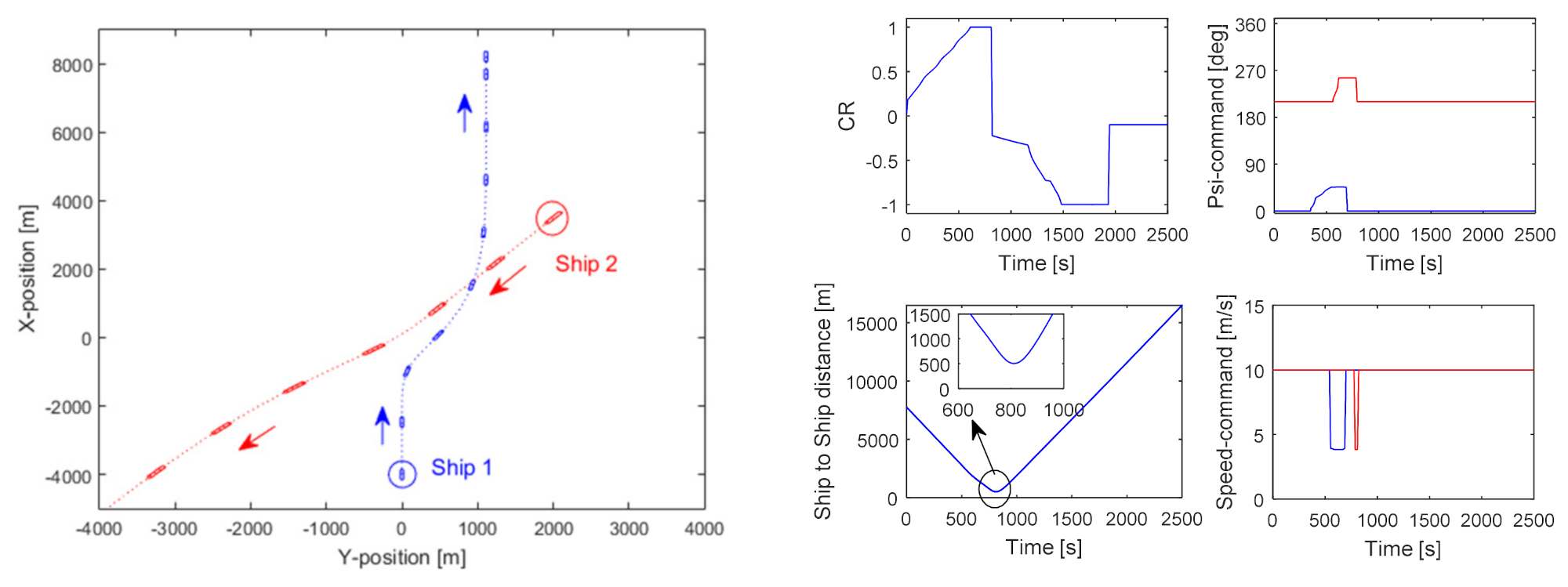
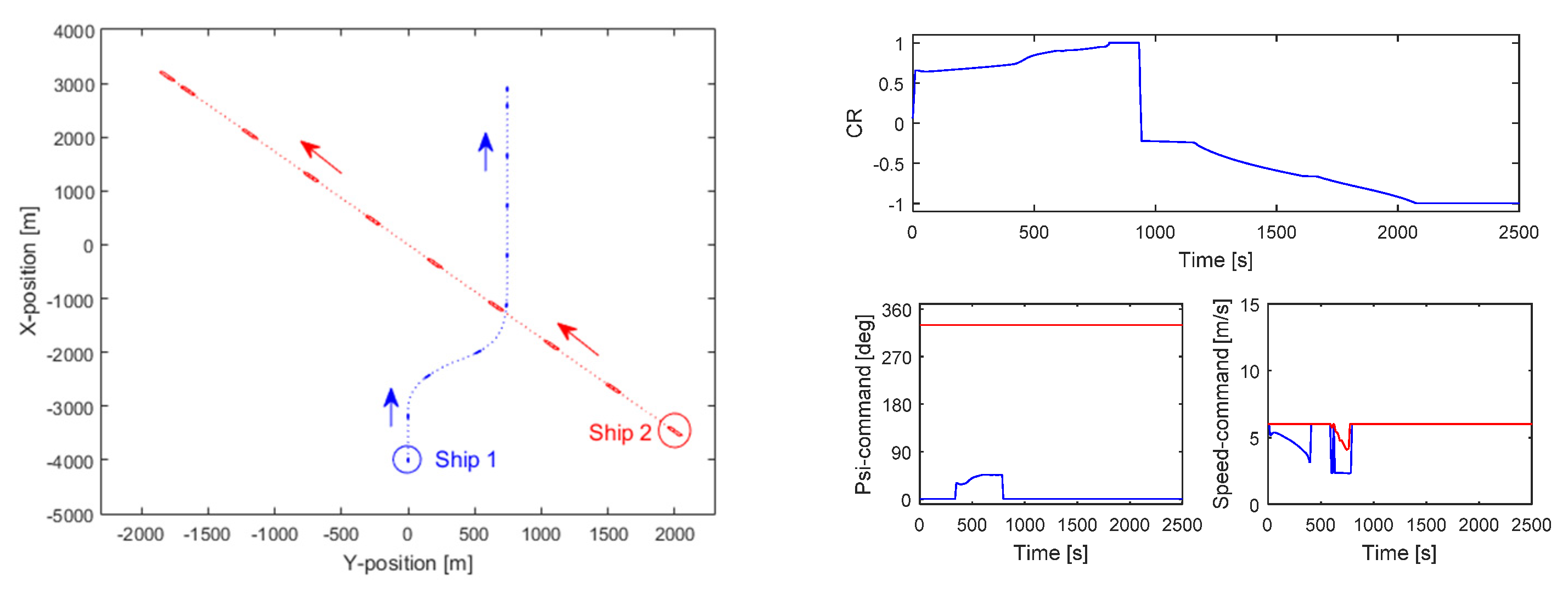
Table 4. For the given initial conditions, the conflict detection module considers no risk in case 1 and case 2, as the CR is less than 0, whereas, in case 3, the module considers the ships are at low risk with CR = 0.18. Later, with the time-lapse, the CR starts to increase for all three cases. However, in case 1, the module initiates the evasive action at 713 s, when the CR reaches approx. 0.65, whereas in case 2, it is at 532 s. This is because the CR reaches its medium-range value earlier in case 2 as it involves larger ships. On the other hand, case 3 involves two large ships, and the module initiated the course changing at 348 s, which is the quickest if compared with the other two cases. It demonstrates that the module has the ability to tune the risk factor, thus the timing to initiate the avoiding actions depending on the ship size. In addition, the duration while persistently holding the command for heading or speed change is not the same for the three cases. In case 3, it is much longer than case 2 and case 1. This is because a larger ship requires more time for a given course or speed change due to its larger inertia. It is also noted that the minimum ship-to-ship distance while the ships crossing each other are 48 m, 324 m, 505 m for cases 1, 2, and 3, respectively.
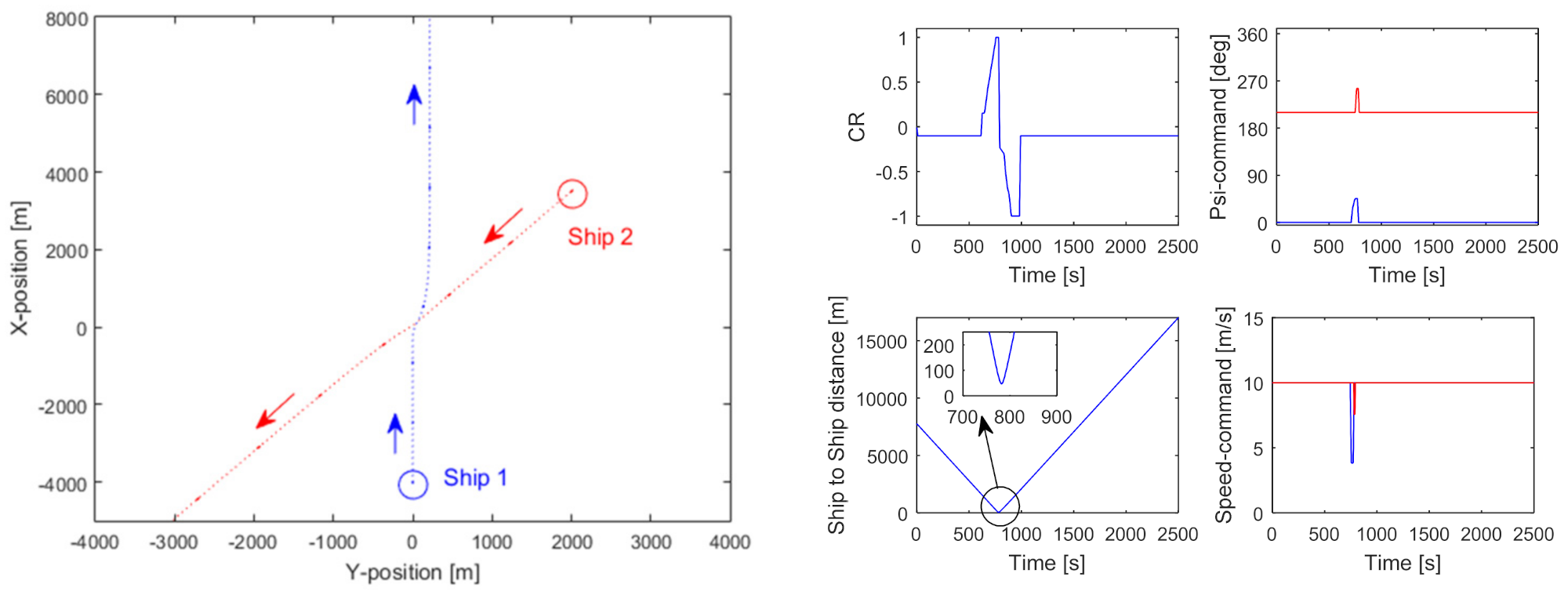
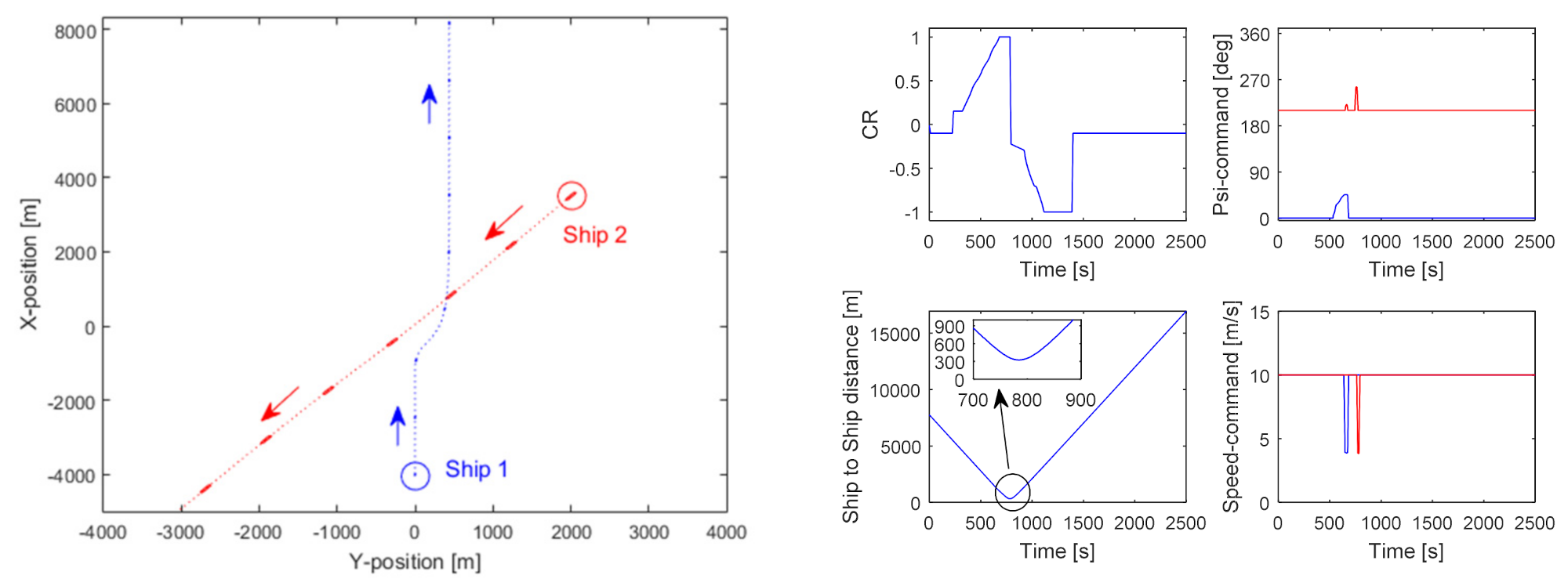
6.2.2. The Proposed System for Different Ship Speed
The system is tested for different ship speeds while keeping the ship length and the other initial conditions the same, and the ship responds differently at different speeds, demonstrating that the system can cope with that dynamic behaviour by adjusting the timing and duration of the ship evasive actions.
Table 5 lists up the details of the ships considered in the following case studies.
Two crossing cases are investigated for the same ship and initial conditions but with different speeds.
Figure 22 and
Figure 23 illustrate the two cases mentioned in
Table 5.
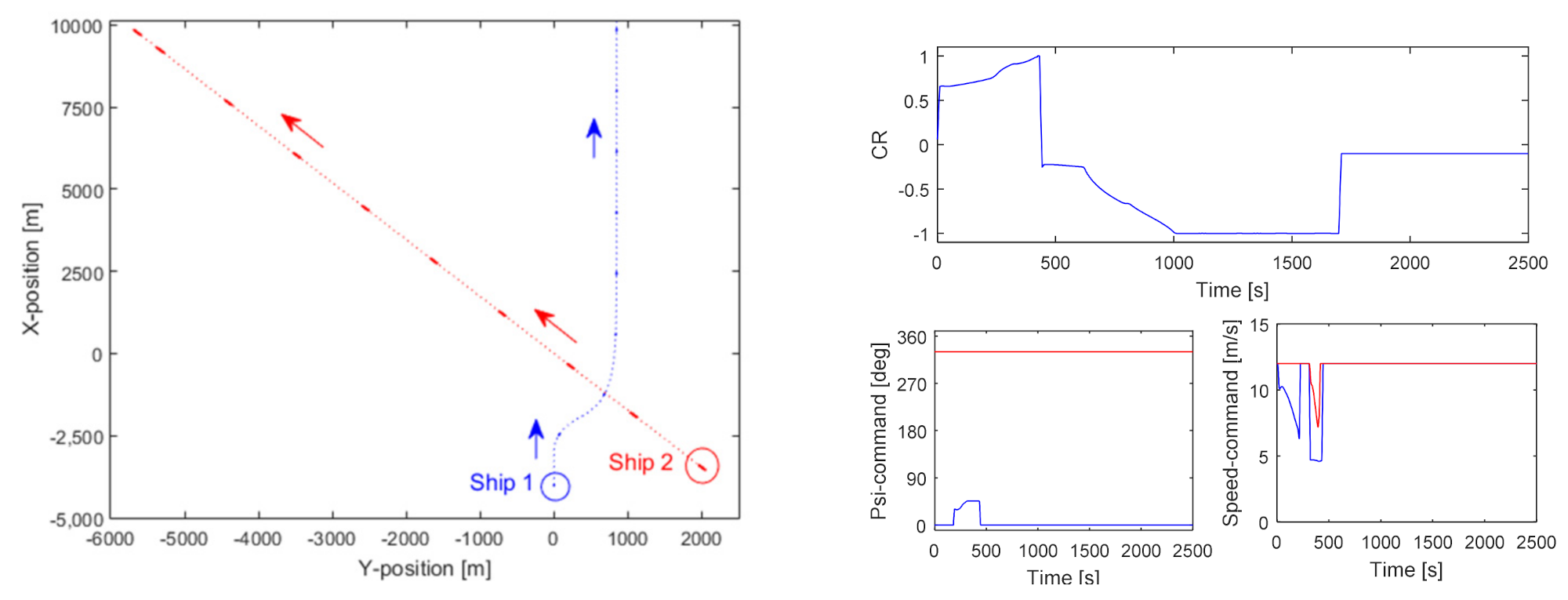
CRs for the above two cases are similar in nature. However, the graph is stretched in case 1 as the ships run slowly. In both cases, ship 2 (stand-on ship) maintains its course with a slight reduction in speed at the later stage when the CR attains its maximum peak. In addition, the duration while considering the course change for ship 1 is shorter in case 2 because the ships responded quickly due to having higher speed. It is also evident that the trajectories for both cases are almost identical. This means that the system has the ability to take adequate actions to guide a ship in a collision-free path, even if the speed varies.
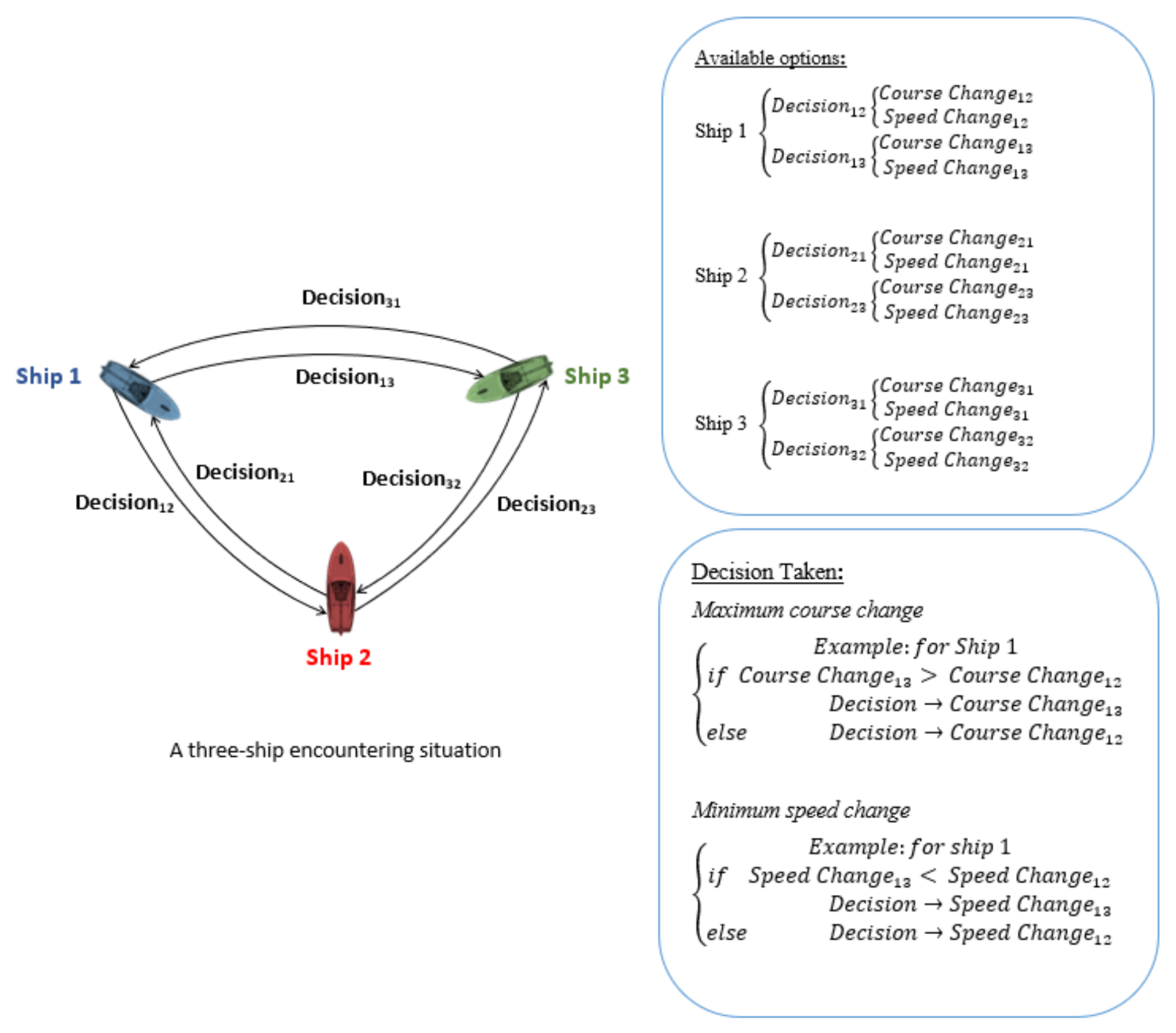
6.3. Maximum-Course and Minimum-Speed Change Approach for Multiple-Ship Encounters
Very few researchers have attempted to verify their proposed collision avoidance system for multiple-ship encounters. A literature review revealed that existing multiple ships encounters collision avoidance models either ignore the COLREGs rules or used a pre-planned or optimization path without taking ship manoeuvrability into account. Therefore, those actions are not realistic. On the contrary, this study considers ship manoeuvring indices, i.e., K and T for 20 different ships in the Nomoto’s model to predict the ship motion more realistically; it also develops a Fuzzy based COLREGs rules compliant collision avoidance system. Feasibility studies of this system are then carried out for multiple ship encounters.
This research first measures the CR logically in the conflict detection module to deal with the multiple-ship encounters. It is believed that the OOW feels more threat when their ship encounters multiple ships than in a one-to-one ship encounter. Therefore, the scale factors considered in the FIS while measuring the CR are tuned to a higher value to pose a higher risk. In this study, the SF for is considered as 30 for three-ship encounters and 35 for four and five ship encounters. On the other hand, SF for is kept as before, which is 180.
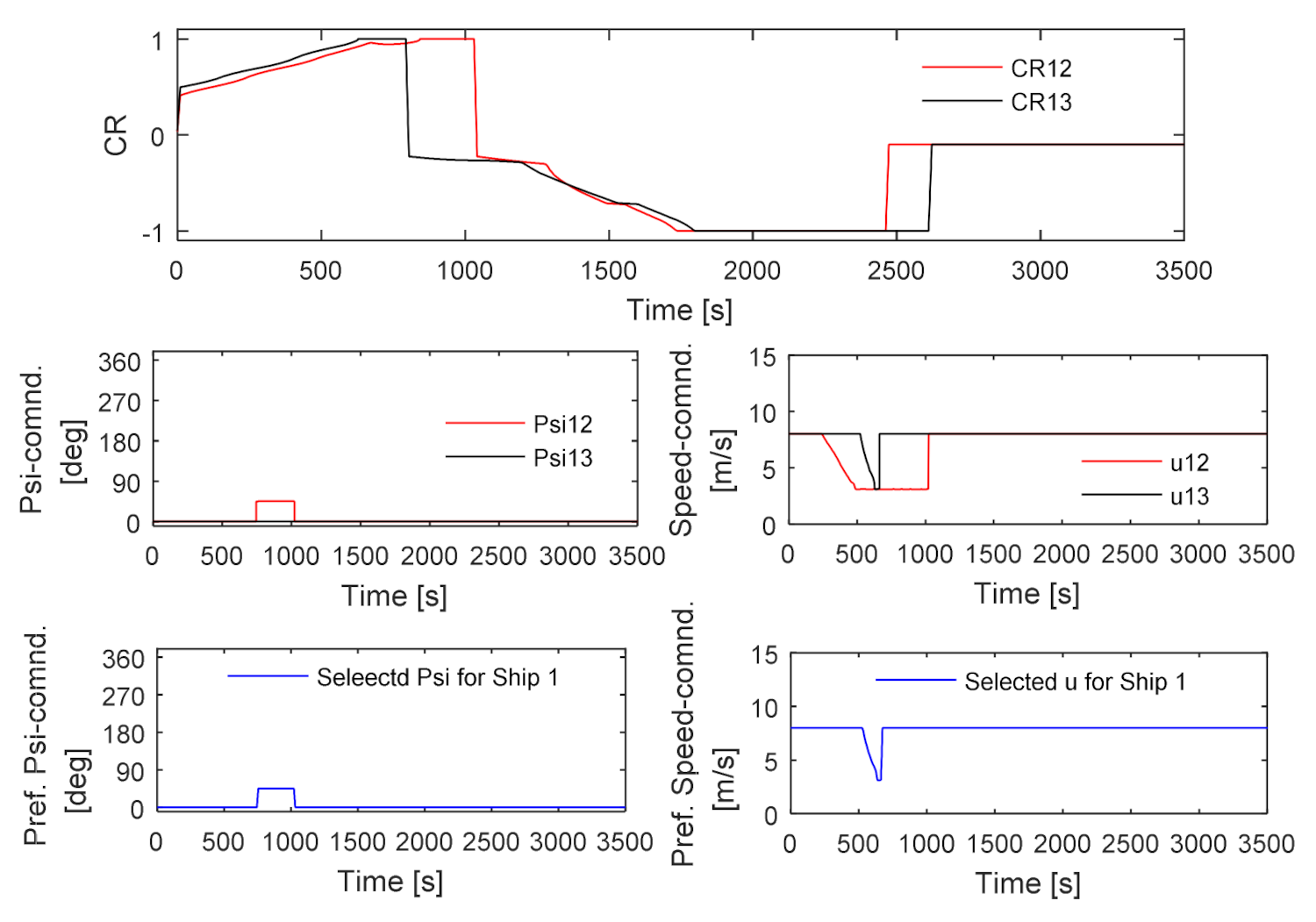
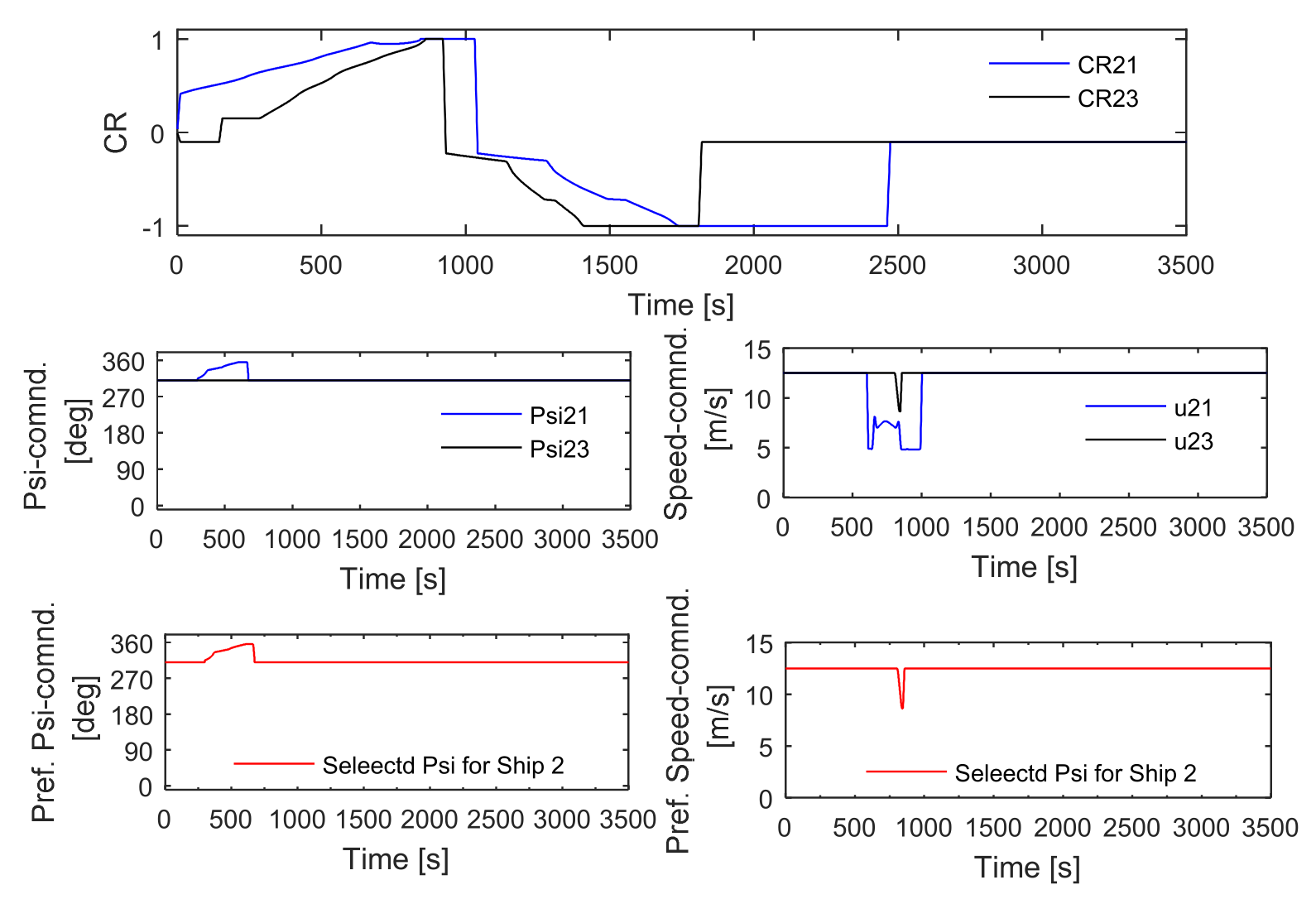
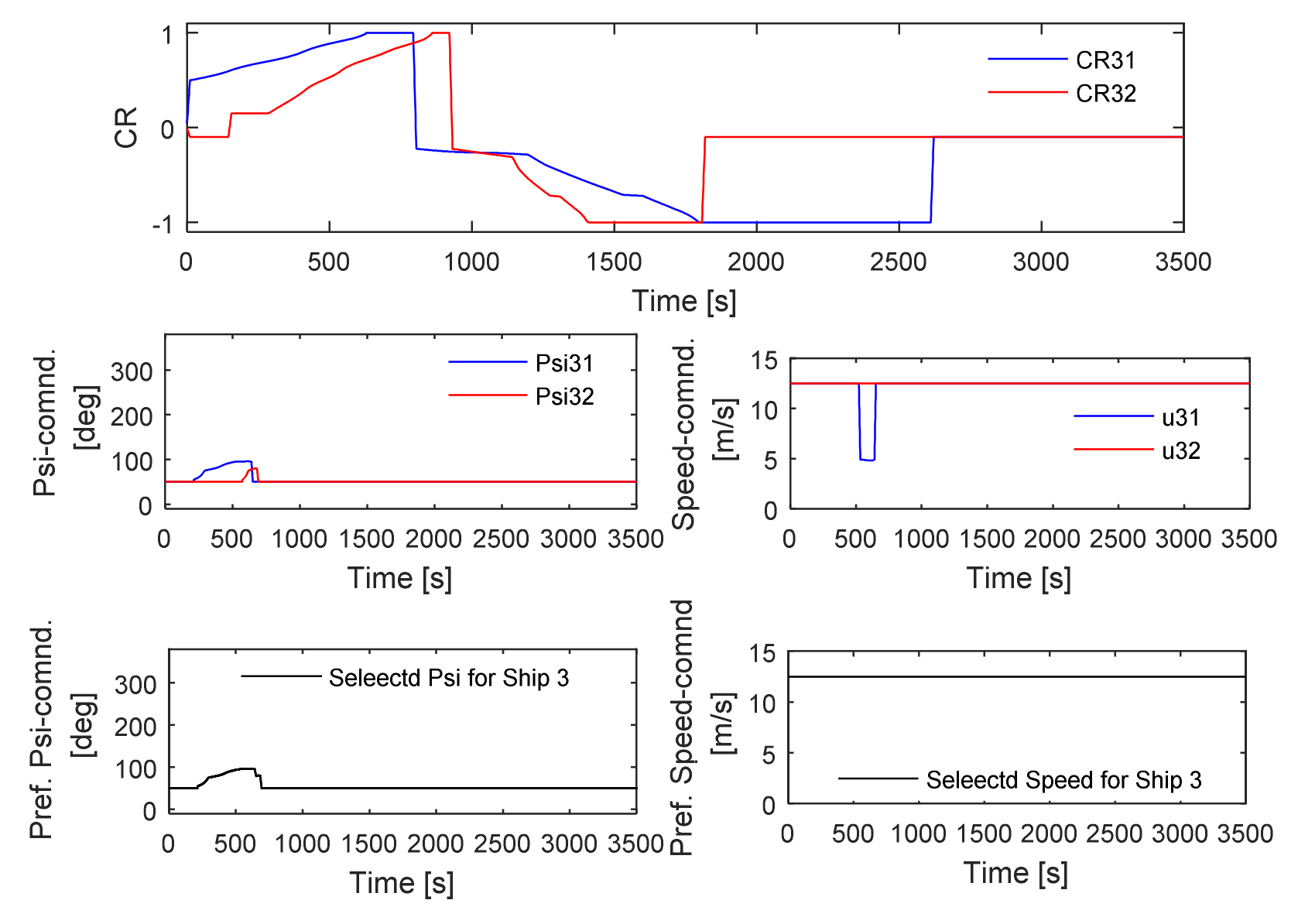
The conflict resolution module is also designed to calculate the evasion actions necessary to avoid each ship. This means that each ship will have two options to choose from to avoid the other two ships in three ship encounters. Similarly, for four and five ship encounters, each ship will have three and four options, respectively. To opt for the most suitable option to avoid all the ships in an encounter, this research proposes to use a simple but effective maximum-course and minimum-speed change approach. In this approach, the system compares all available options calculated by the resolution module instantly and chooses the maximum-course and minimum-speed change command for execution. This adopted approach is then tested for complicated multiple-ship-encountering scenarios.
6.4. The Proposed System to Solve Imazu Problems
Imazu problem [
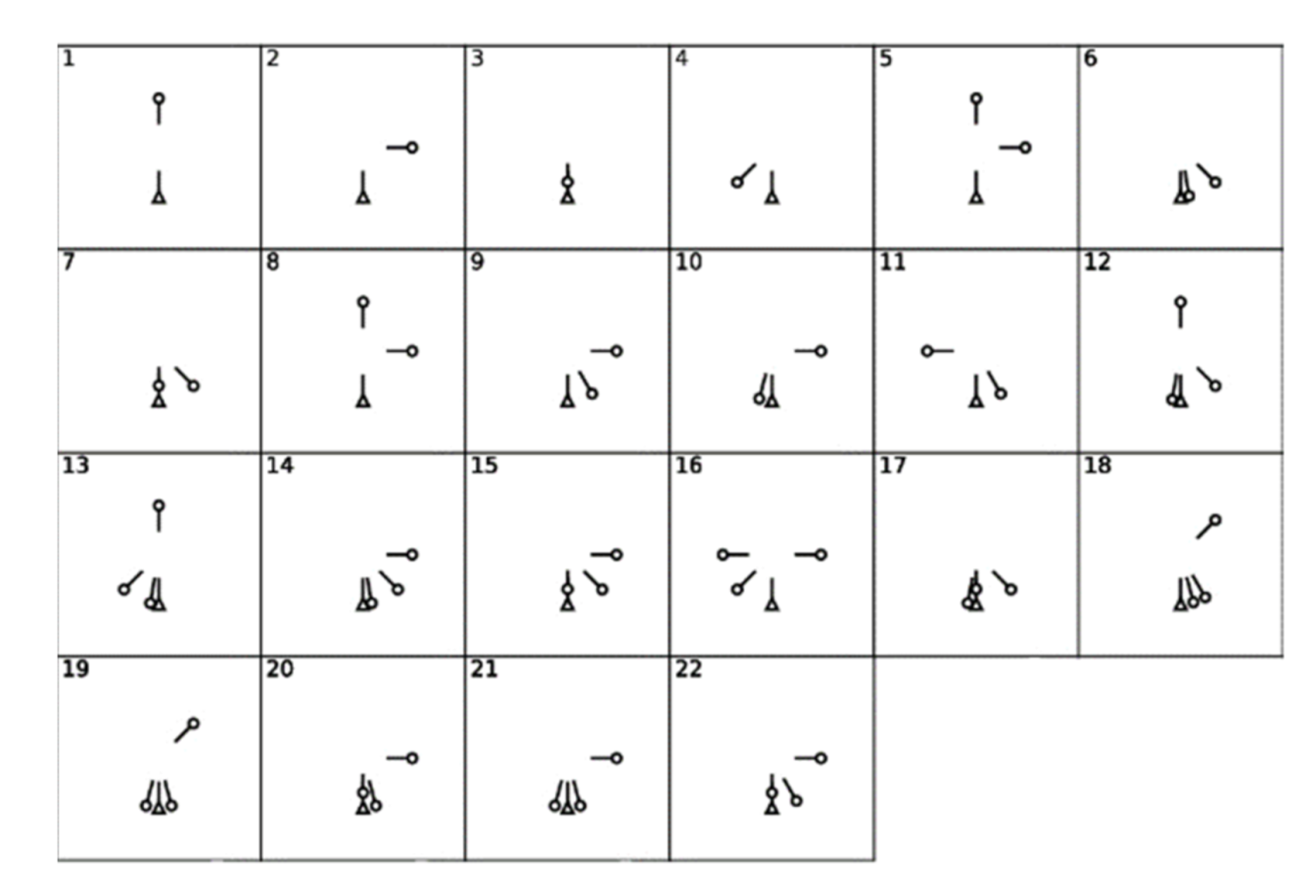
25] is chosen as a benchmark in this study. This problem consists of basic ship encounters of one on one and other difficult situations of multiple ship encounters.
Figure 30 shows the 22 problems defined by Imazu, where numbers on the top left corner in each box indicate the case number. The short bar from the triangle and circle indicates the velocity vector of the ships. These 22 cases are tested with the proposed system and the maximum-course and minimum-speed change approach. The results are shown in
Figure 31.
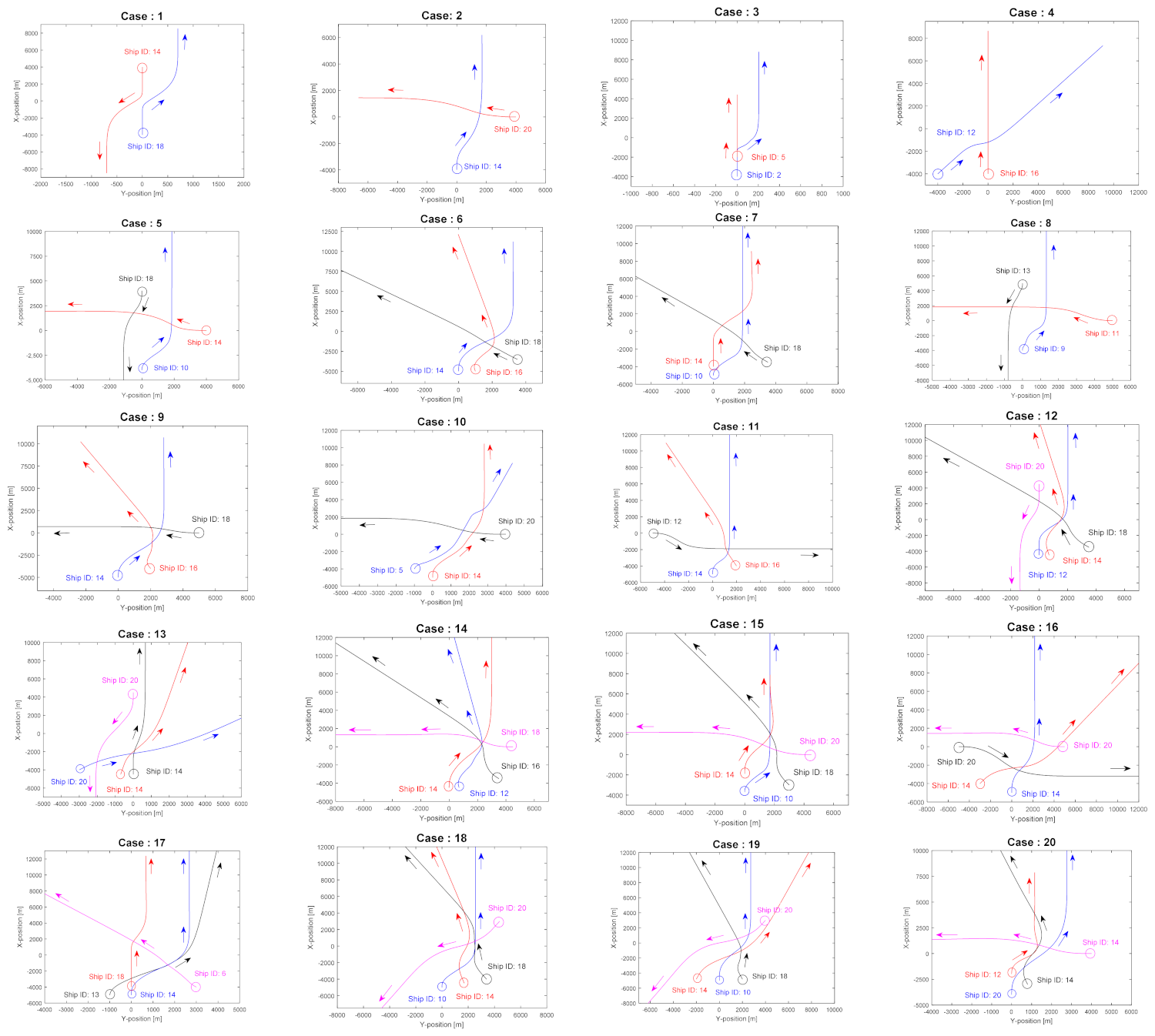
The ship types are randomly selected from
Table 1 and mentioned in the form of Ship IDs in
Figure 31. The initial positions, speed, and headings are selected based on the encountering situations mentioned in
Figure 30. Additionally, all the ships are set in courses that are going to collide at the (0, 0) point in the simulation domain if no actions are taken. The results of all simulations show a successful demonstration of this proposed system as the ships avoid each other. The evasive actions taken by the ships are COLREGs compliant and also take the ship dynamics into account.
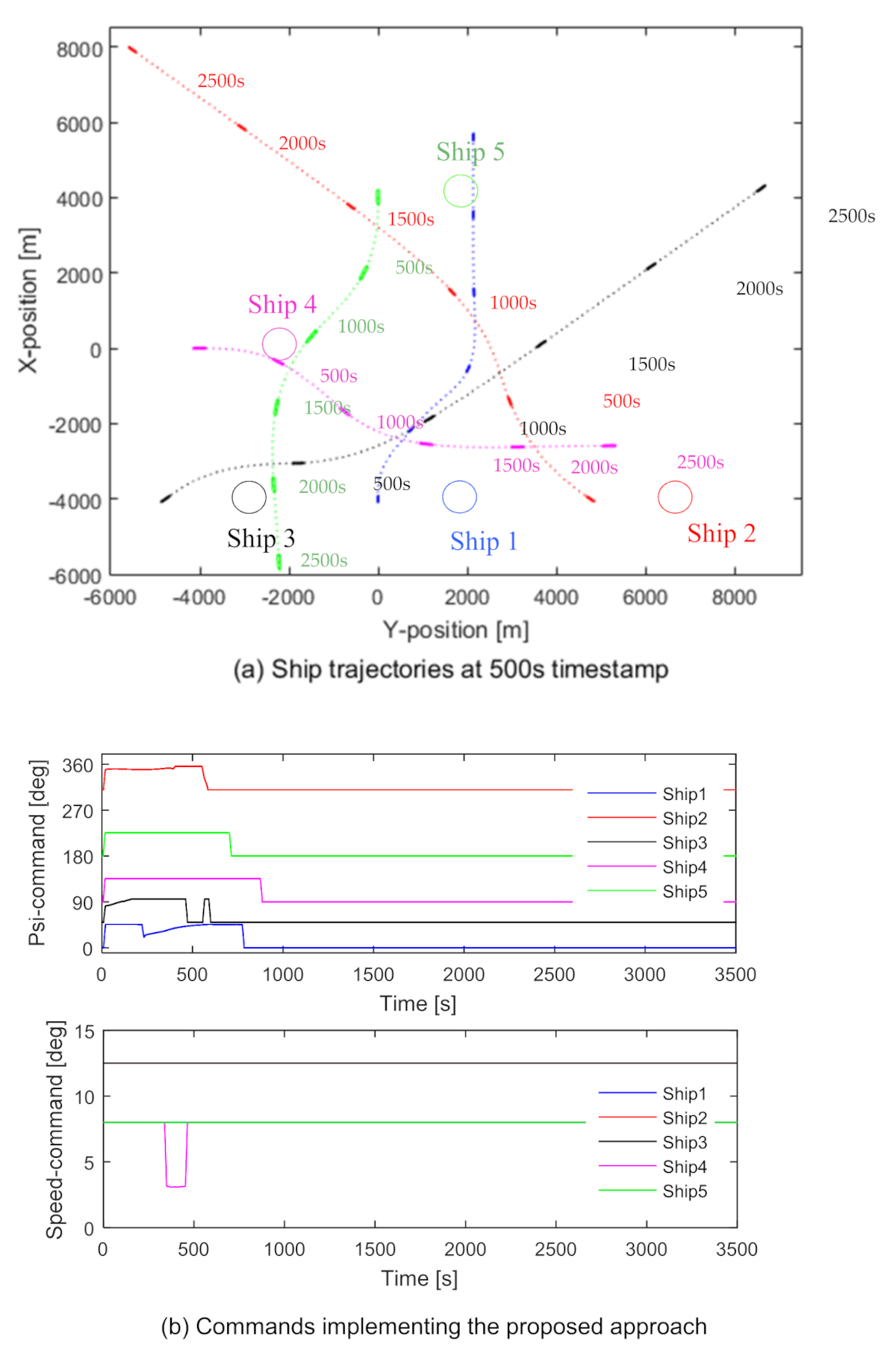
Figure 31 also demonstrates two extra cases with five ship encounters. Case extra 1 is considered by adding an extra ship (ship ID: 6) with a heading of
to the pre-existing case 21. This does not cause any drastic changes in the course changing pattern of other ships as the added ship takes adequate starboard rudder to avoid other ships. On the other hand, case extra 2 is considered by adding an extra ship (Ship ID: 13) with a heading of
to the pre-existing case 17. This added ship causes a drastic change in the course changing pattern of the other two ships, named Ship ID: 13 (red line) and Ship ID: 6 (pink line).
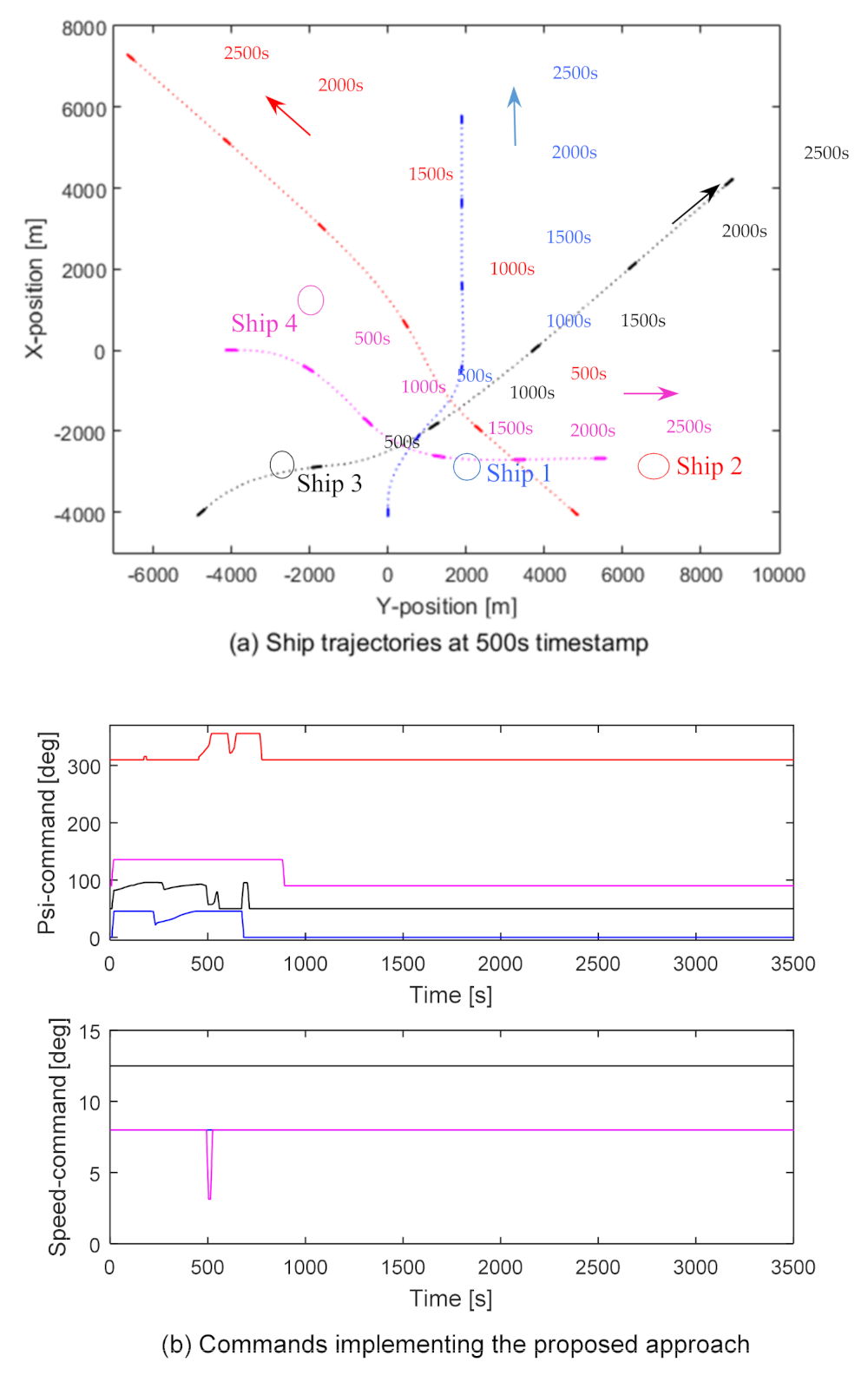
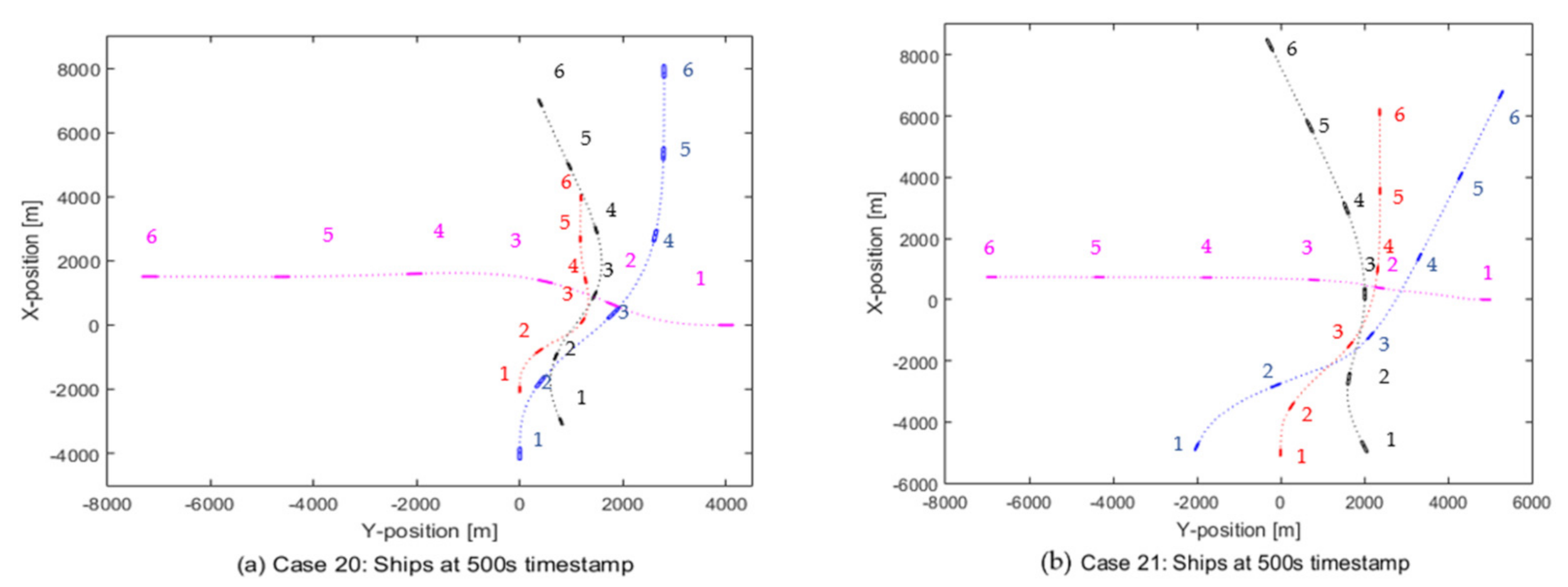
To demonstrate the timestamp of the ships’ evasive actions, two samples from
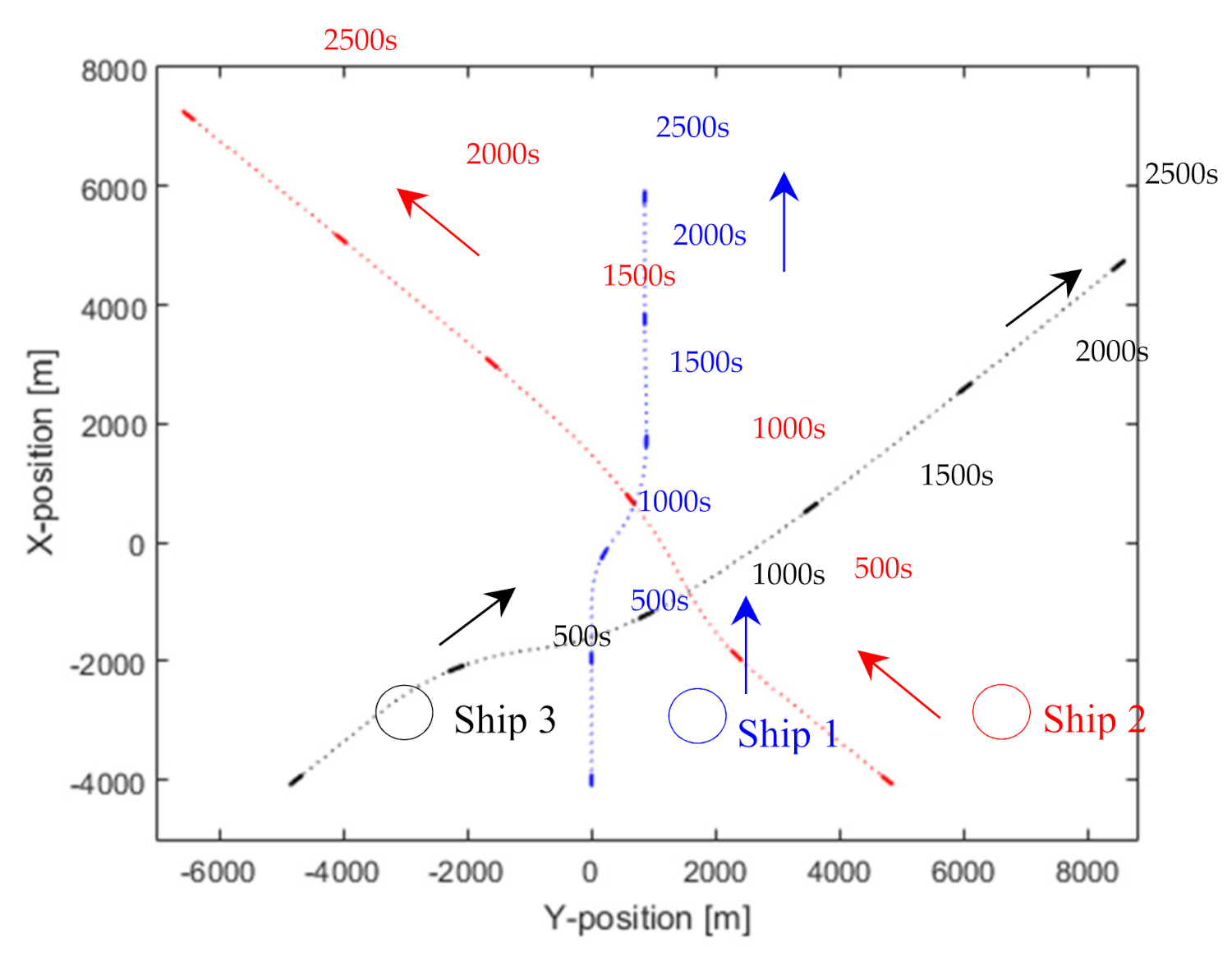
Figure 31, case 20 and case 21, are chosen and shown in
Figure 32. The integers in
Figure 32 define the ship positions at 500 s interval, giving a clear understanding of how the system manages to guide all the ships to pass each other by maintaining a proper safety distance.
Finally, all these results show that the system is tolerant enough to consider more ships in any encountering situation proposed by Imazu. This study has analysed up to five ships in an encounter, which could be increased in future studies.





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}