
Solid-Fluid Coupled Numerical Analysis of Suction Caisson Installation in Sand




Abstract
:1. Introduction
2. Large Deformation Solid-Fluid Coupled Analysis Method
2.1. Large Deformation Analysis Method-ALE
2.2. Solid-Fluid Coupling Formulation
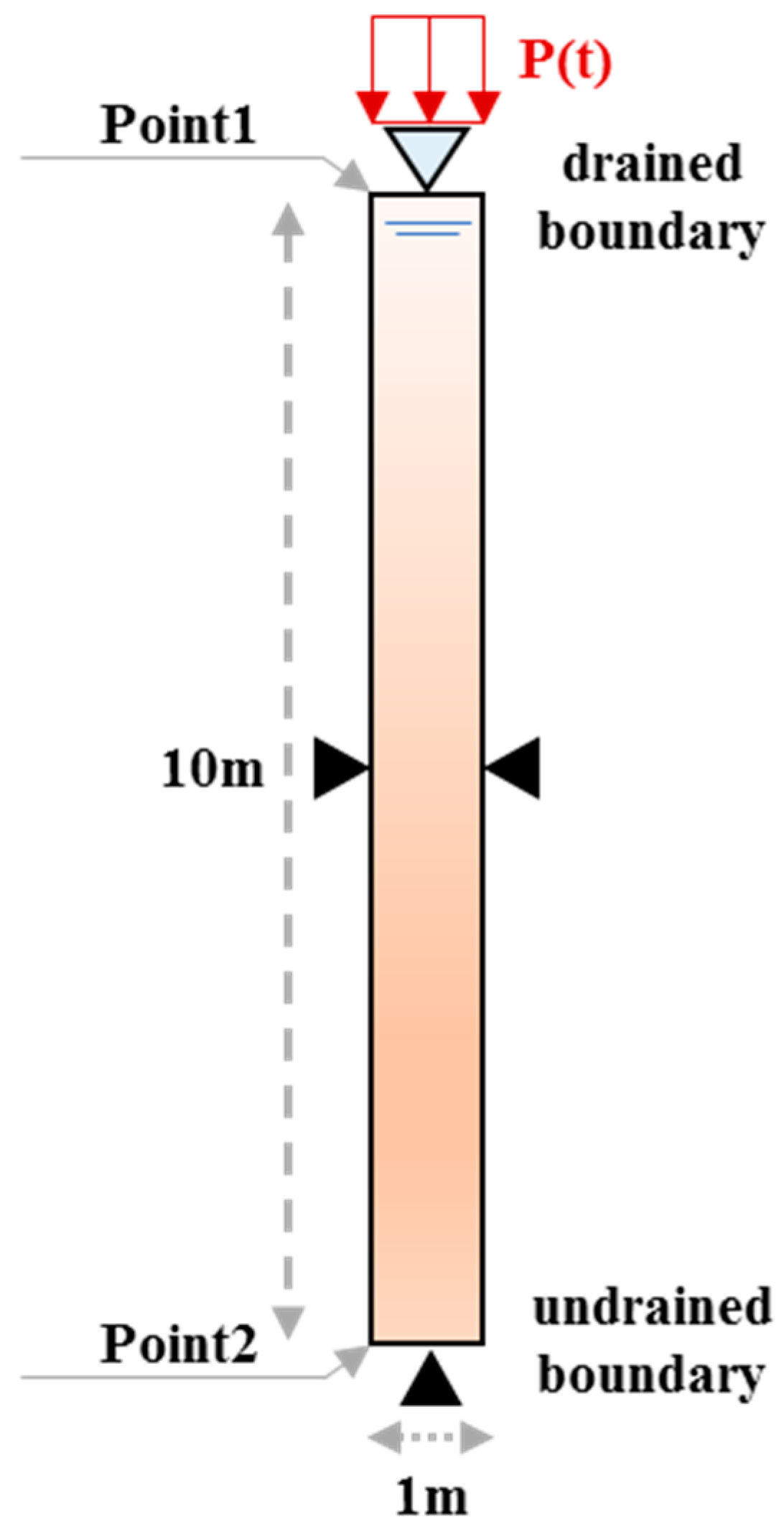
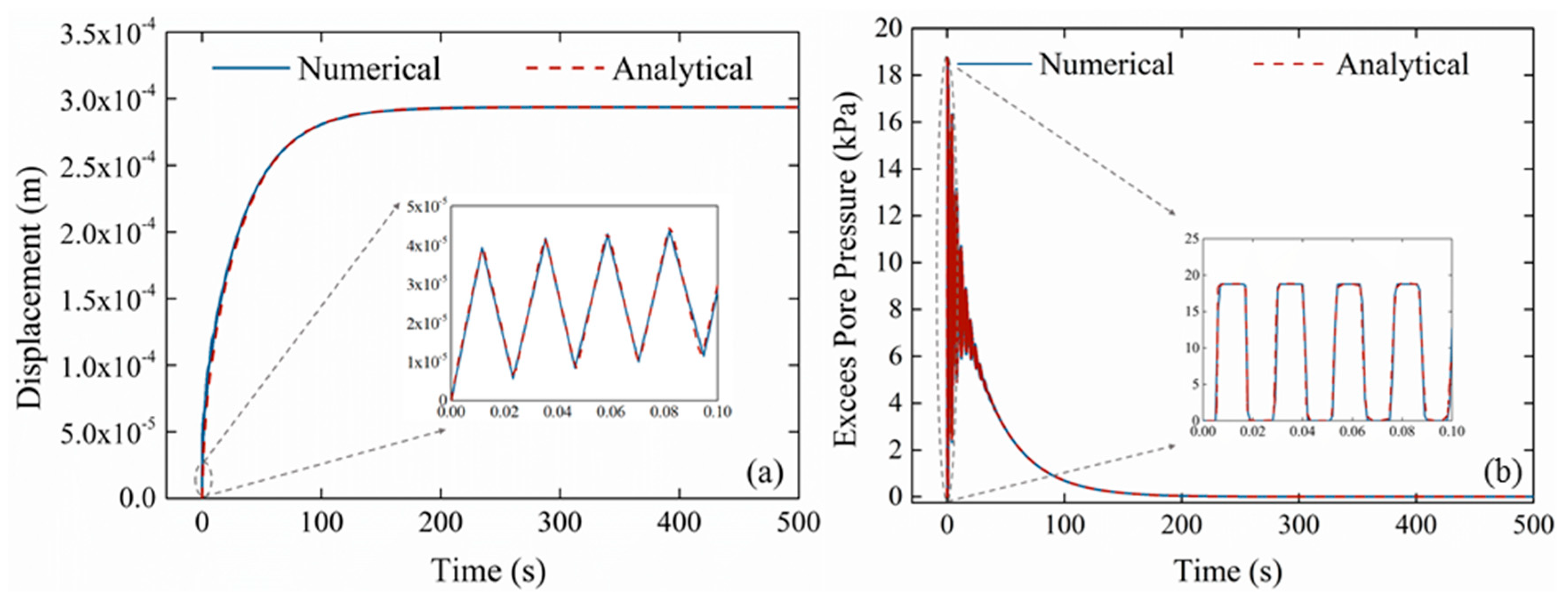
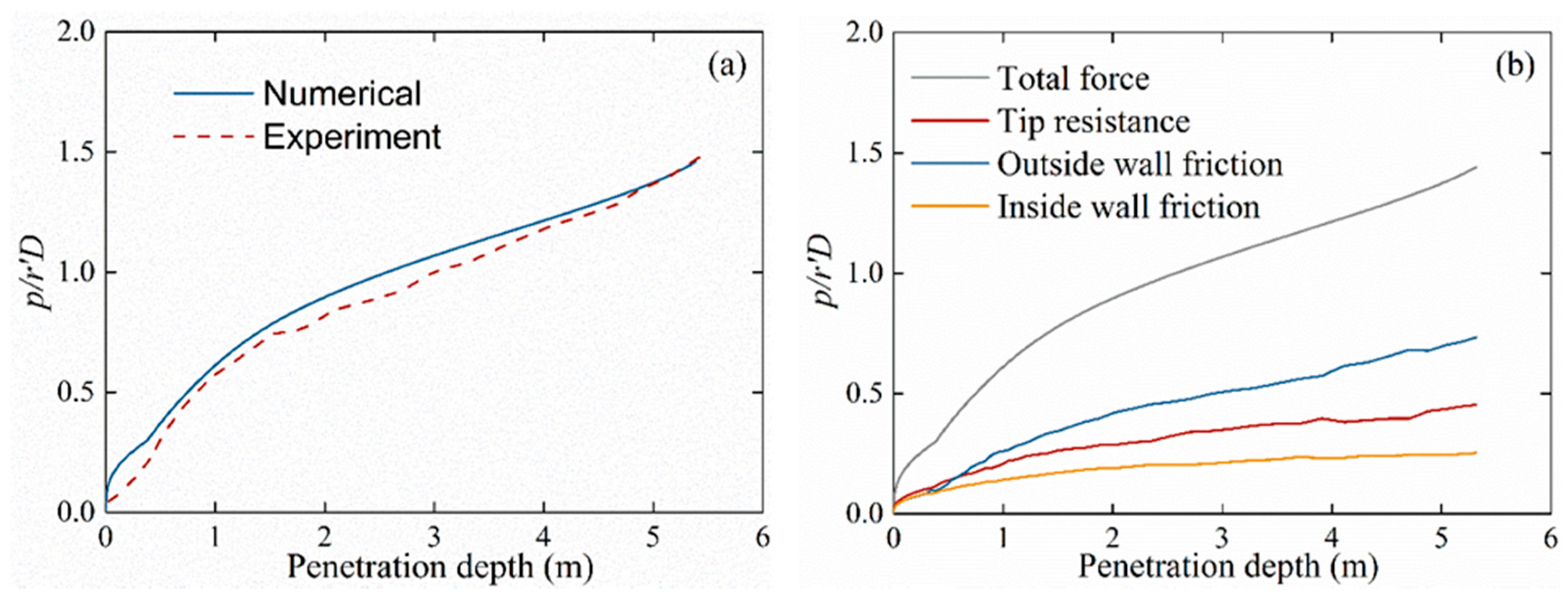
2.3. Validation of Solid-Fluid Coupling Analysis Method
3. Numerical Model for Suction Caisson Installation Simulation
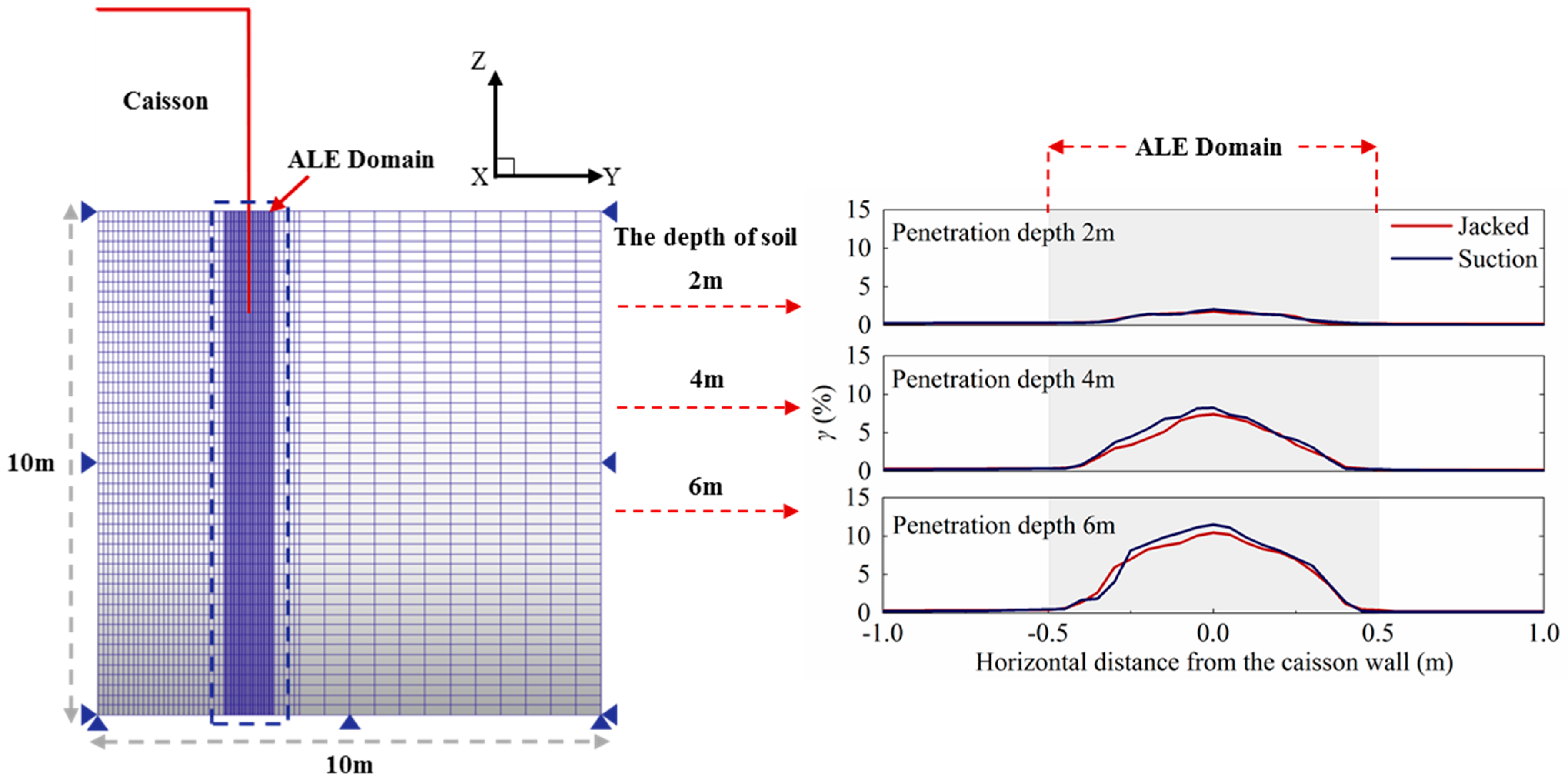
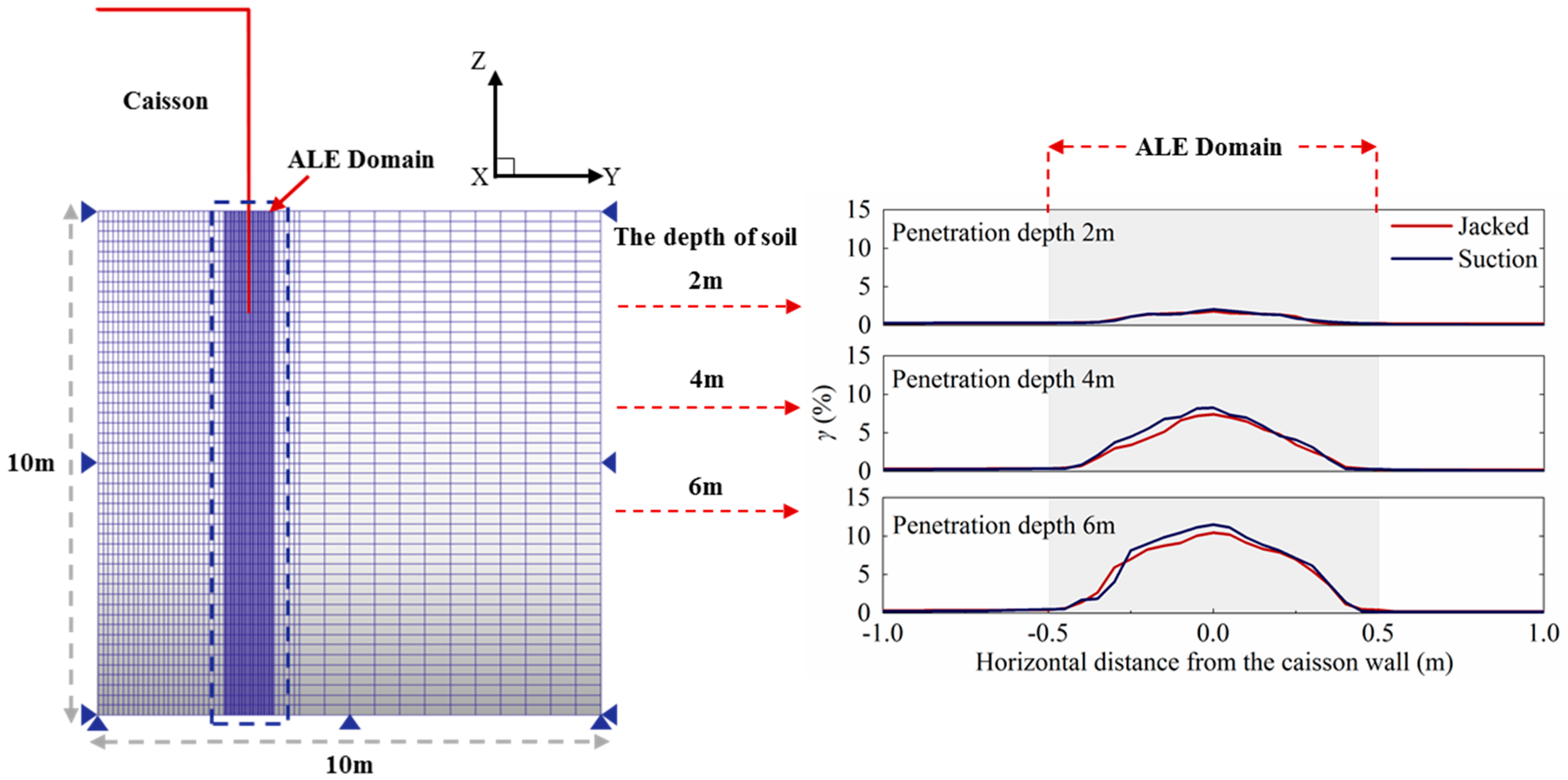
3.1. Numerical Model Setup
3.2. Soil and Contact Model
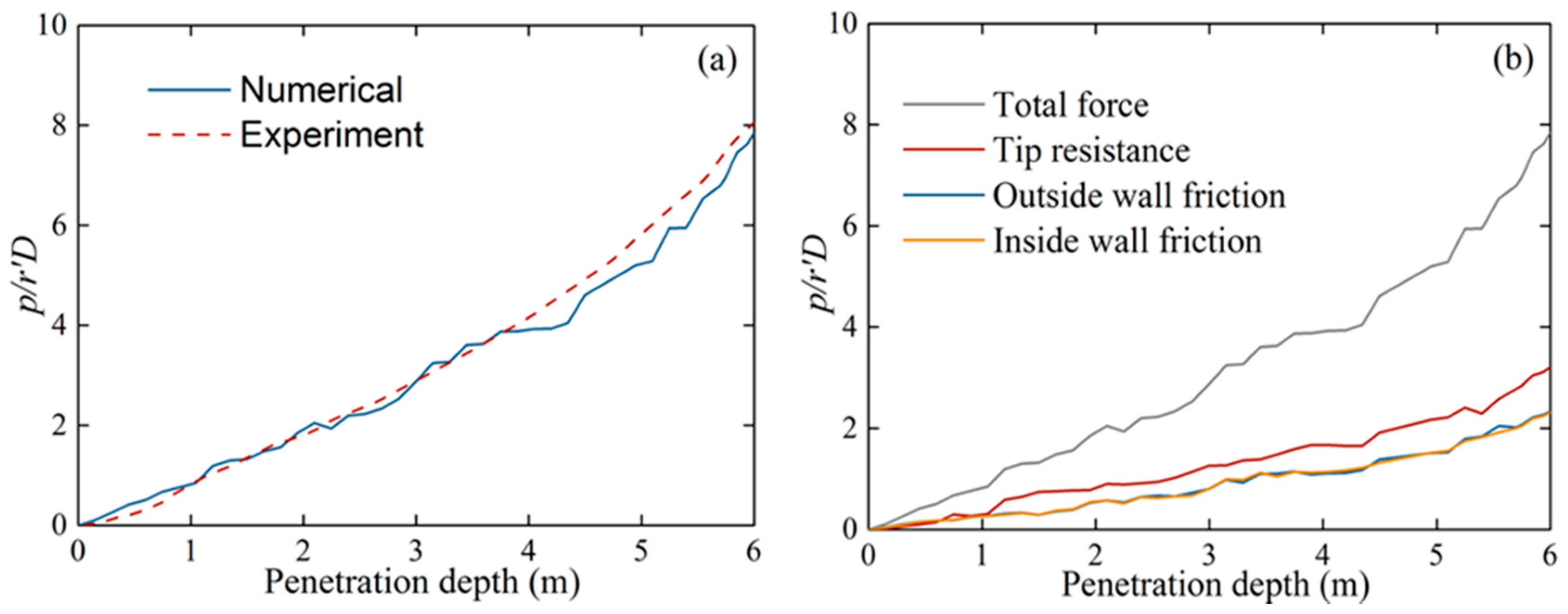
4. Analysis of Jacked and Suction Penetration
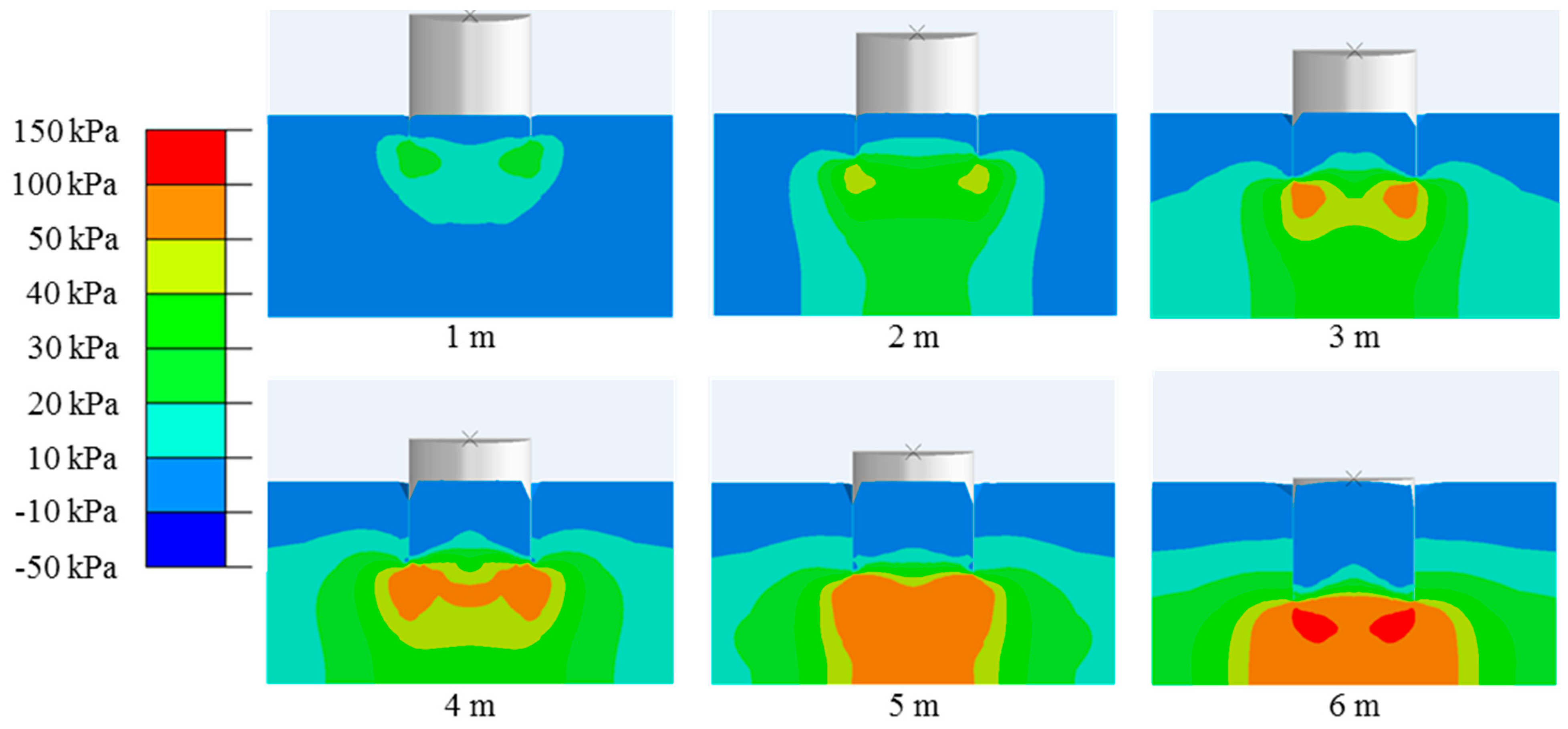
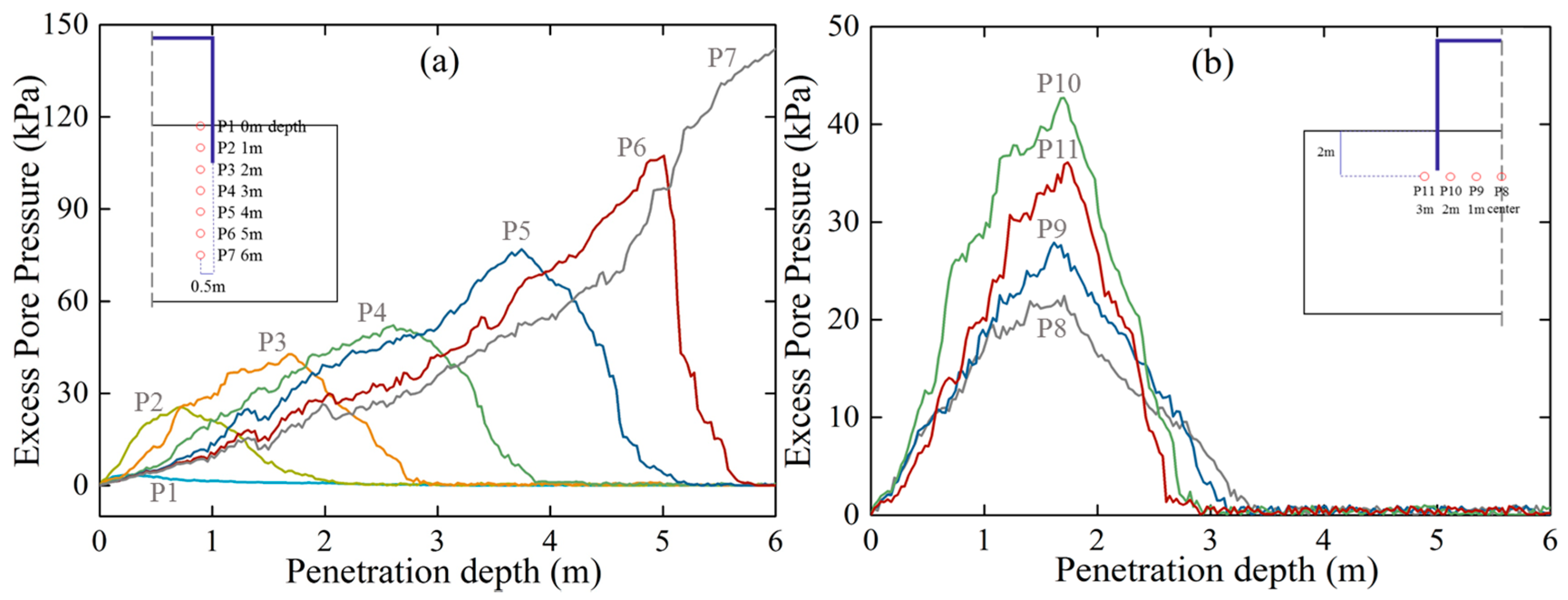
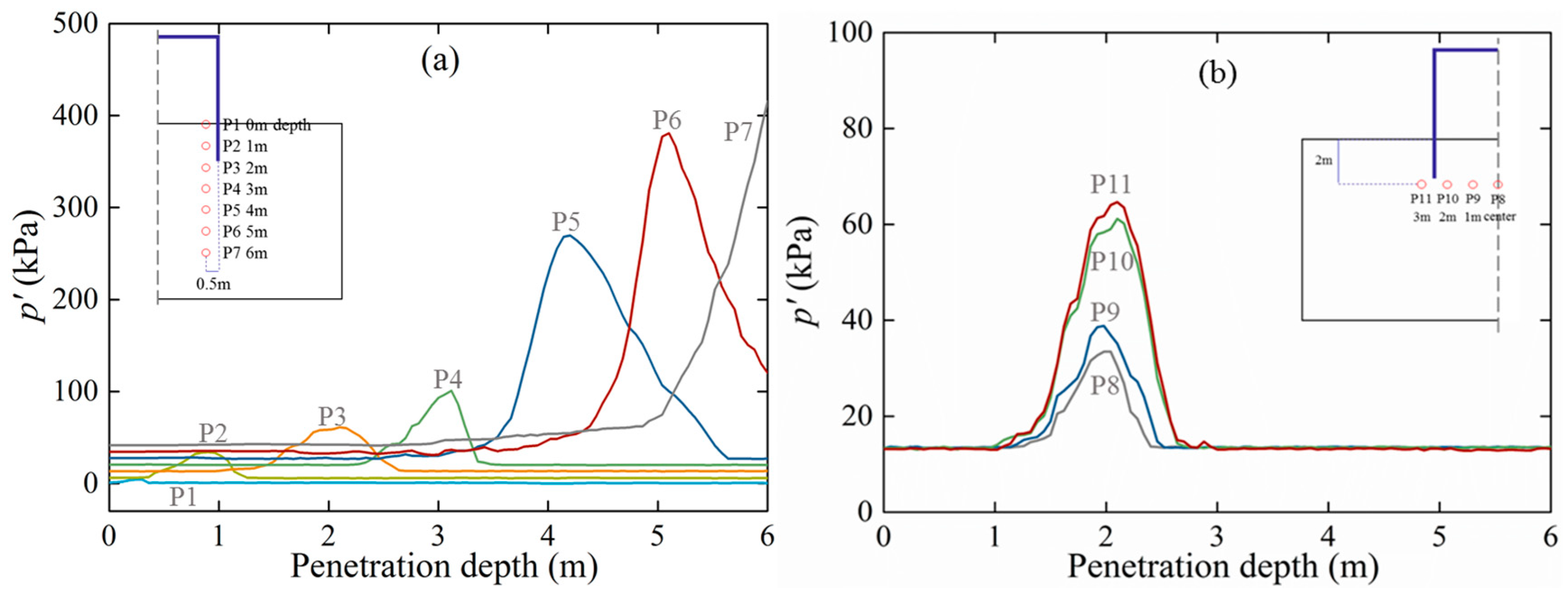
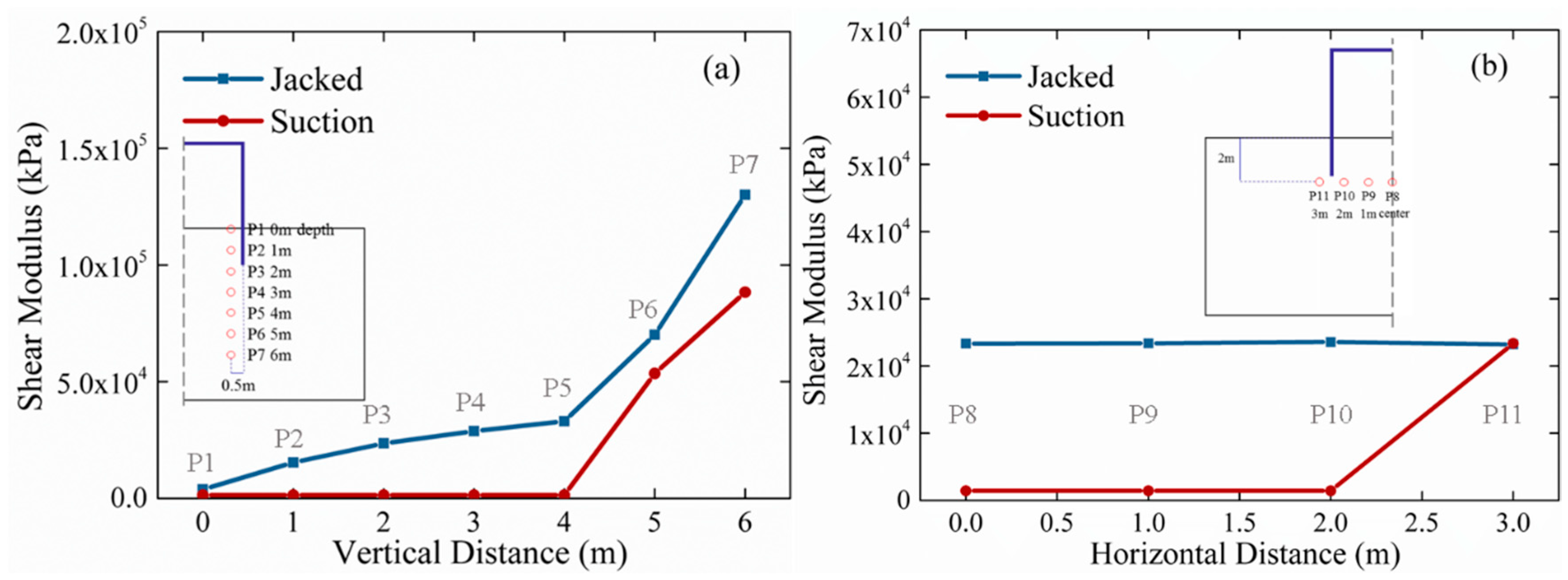
4.1. Jacked Penetration
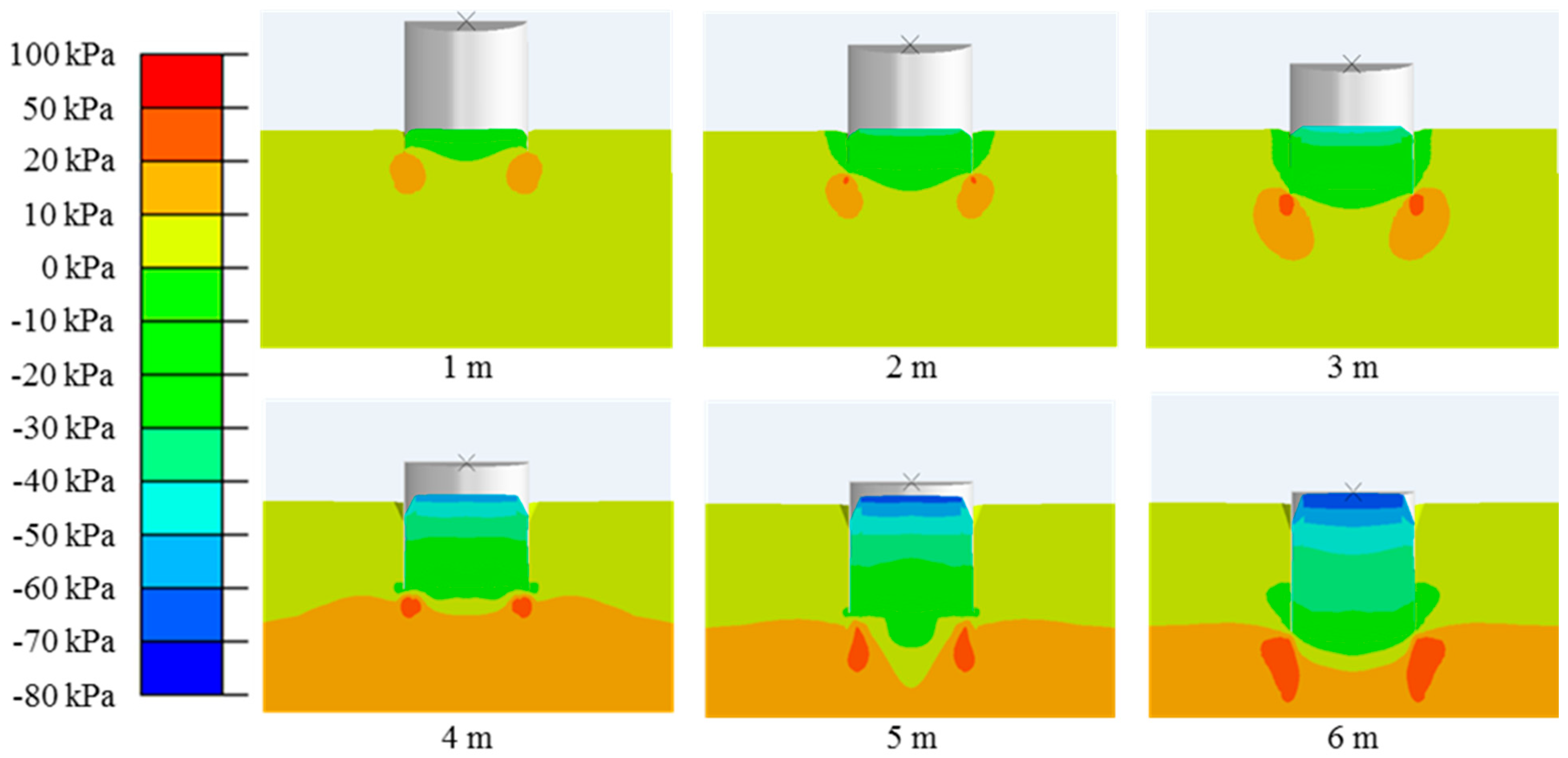
4.2. Suction Penetration
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Colliat, J.L.; Dendani, H. Girassol: Geotechnical design analyses and installation of the suction anchors. In Proceedings of the SUT International Conference on Offshore Site Investigation and Geotechnics, London, UK, 26–28 November 2002. [Google Scholar]
- Tjelta, T.I. Suction piles: Their position and application today. In Proceedings of the 11th International Offshore and Polar Engineering Conference, Stavanger, Norway, 17–22 June 2001. [Google Scholar]
- Feld, T.; Rasmussen, J.L.; Sørensen, P.H. Structural and economic optimization of offshore wind turbine support structure and foundation. In Proceedings of the 18th International Conference on OMAE, St. John’s, NL, Canada, 11–16 July 1999. [Google Scholar]
- Feld, T. Suction Buckets: A New Innovative Foundation Concept, Applied to Offshore Wind Turbines. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 2001. [Google Scholar]
- Senpere, D.; Auvergne, G.A. Suction anchor piles—A proven alternative to driving or drilling. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 3–6 May 1982. [Google Scholar]
- Hogervorst, J.R. Field trails with large diameter suction piles. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 1980. [Google Scholar]
- Allersma, H.G.B.; Hogervorst, J.R.; Pimoulle, M. Centrifuge modelling of suction pile installation using a percussion technique. In Proceedings of the 11th International Offshore and Polar Engineering Conference, Stavanger, Norway, 17–22 June 2001. [Google Scholar]
- Allersma, H.G.B. Centrifuge research on suction piles: Installation and bearing capacity. In Proceedings of the International Conference on Foundations: Innovations, Observations, Design and Practice, Dundee, UK, 2–5 September 2003. [Google Scholar]
- Tran, M.N. Installation of Suction Caissons in Dense Sand and the Influence of Silt and Cemented Layers. Ph.D. Thesis, University of Sydney, Sydney, Australia, 2005. [Google Scholar]
- Chen, W.; Zhou, H.; Randolph, M.F. Effect of installation method on external shaft friction of caissons in soft clay. J. Geotech. Geoenviron. Eng. 2009, 135, 605–615. [Google Scholar] [CrossRef]
- Byrne, B.W.; Houlsby, G.T. Experimental investigations of the response of suction caissons to transient combined loading. J. Geotech. Geoenviron. Eng. 2004, 130, 240–253. [Google Scholar] [CrossRef] [Green Version]
- Erbrich, C.T.; Tjelta, T.I. Installation of bucket foundations and suction caissons in sand-geotechnical performance. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 3–6 May 1999. [Google Scholar]
- Kim, J.H.; Kim, D.S. Soil plug heave induced by suction bucket installation on sand via centrifuge model tests. Mar. Georesources Geotechnol. 2020, 38, 1245–1256. [Google Scholar] [CrossRef]
- Guo, Z.; Wang, L.; Yuan, F.; Li, L. Model tests on installation techniques of suction caissons in a soft clay seabed. Appl. Ocean. Res. 2012, 34, 116–125. [Google Scholar] [CrossRef]
- Panagoulias, S.; van Dijk, B.F.J.; Drummen, T.; Askarinejad, A.; Pisanò, F. Critical suction pressure during installation of suction caissons in sand. In Proceedings of the 8th International Conference on Offshore Site Investigation & Geotechnics, London, UK, 12–14 September 2017. [Google Scholar]
- Andersen, K.H.; Jostad, H.P. Shear strength along outside wall of suction anchors in clay after installation. In Proceedings of the 12th International Offshore and Polar Engineering Conference, Cupertino, CA, USA, 26–31 May 2002. [Google Scholar]
- Cao, J.; Philips, R.; Popescu, R.; Audibert, J.M.E.; Al-Khafaji, Z. Numerical analysis of the behavior of suction caissons in clay. In Proceedings of the 12th International Offshore and Polar Engineering Conference, Cupertino, CA, USA, 26–31 May 2002. [Google Scholar]
- Zhou, H.; Randolph, M.F. Numerical simulation of caissons installation in clay by suction and by jacking. In Proceedings of the 16th International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 28 May–2 June 2006. [Google Scholar]
- Wang, Y.; Zhu, X.; Lv, Y.; Yang, Q. Large deformation finite element analysis of the installation of suction caisson in clay. Mar. Georesources Geotechnol. 2018, 36, 883–894. [Google Scholar] [CrossRef]
- Guo, Z.; Jeng, D.; Guo, W.; He, R. Simplified approximation for seepage effect on penetration resistance of suction caissons in sand. Ships Offshore Struct. 2017, 12, 980–990. [Google Scholar] [CrossRef]
- Stapelfeldt, M.; Bienen, B.; Grabe, J. Insights into Suction Caisson Installation Utilising the Material Point Method. In Proceedings of the 16th International Conference of IACMAG, Saint Martin d’Hères, France, 30 June–3 July 2020. [Google Scholar]
- Mehravar, M.; Harireche, O.; Faramarzi, A.; Alani, A.M. Modelling the variation of suction pressure during caisson installation in sand using FLAC3D. Ships Offshore Struct. 2017, 12, 893–899. [Google Scholar] [CrossRef]
- Houlsby, G.T.; Byrne, B.W. Design procedures for installation of suction caissons in sand. Geotech. Eng. 2005, 158, 135–144. [Google Scholar] [CrossRef]
- Houlsby, G.T.; Byrne, B.W. Design procedures for installation of suction caissons in clay and other materials. Geotech. Eng. 2005, 158, 75–82. [Google Scholar] [CrossRef]
- Walker, J.; Yu, H.S. Adaptive finite element analysis of cone penetration in clay. Acta Geotech. 2006, 1, 43–57. [Google Scholar] [CrossRef]
- Nazem, M.; Carter, J.P.; Airey, D.W. Arbitrary Lagrangian-Eulerian method for dynamic analysis of geotechnical problems. Comput. Geotech. 2009, 36, 549–557. [Google Scholar] [CrossRef]
- Sheng, D.; Nazem, M.; Carter, J.P. Some computational aspects for solving deep penetration problems in geomechanics. Comput. Mech. 2009, 44, 549–561. [Google Scholar] [CrossRef] [Green Version]
- Hamann, T.; Grabe, J. A simple dynamic approach for the numerical modelling of soil as a two-phase material. Geotechnik 2013, 36, 180–191. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Chan, A.H.C.; Pastor, M.; Schrefler, B.A.; Shiomi, T. Computational Geomechanics; Wiley: New York, NY, USA, 1999; pp. 7–31. [Google Scholar]
- Schanz, M.; Cheng, A.H.D. Transient wave propagation in a one-dimensional poroelastic column. Acta Mech. 2000, 145, 1–18. [Google Scholar] [CrossRef]
- Ragni, R.; Bienen, B.; Stanier, S.; O’Loughlin, C.; Cassidy, M. Observations during suction bucket installation in sand. Int. J. Phys. Model. Geotech. 2019, 20, 1–49. [Google Scholar] [CrossRef]
- Richart, F.E.; Woods, R.E.; Hall, J.J.R. Vibration of Soils and Foundations; International Series in Theoretical and Applied Mechanics; Prentice-Hall: Hoboken, NJ, USA, 1970. [Google Scholar]
- Tran, M.N.; Mark, F.R.; David, W.A. Installation of suction caissons in sand with silt layers. J. Geotech. Geoenviron. Eng. 2007, 133, 1183–1191. [Google Scholar] [CrossRef]
- Harireche, O.; Mehravar, M.; Alani, A.M. Suction caisson installation in sand with isotropic permeability varying with depth. Appl. Ocean. Res. 2013, 43, 256–263. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Cao, W.; Xue, L.; Zhang, J.M. An anisotropic plasticity model incorporating fabric evolution for monotonic and cyclic behavior of sand. Acta Geotech. 2021, 16, 43–65. [Google Scholar] [CrossRef]
- Bordón, J.D.R.; Aznárez, J.J.; Maeso, O. Dynamic model of open shell structures buried in poroelastic soils. Comput. Mech. 2017, 60, 269–288. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E (Pa) | μ | n | Kw (Pa) | Ks (Pa) | ρw (kg/m3) | ρ (kg/m3) | |
|---|---|---|---|---|---|---|---|
| 2.54 × 108 | 0.298 | 0.48 | 3.3 × 109 | 1 × 1010 | 3.55 × 10−5 | 1000 | 1884 |
| Property | Value |
|---|---|
| Specific gravity Gs | 2.67 |
| Saturated weight (kN/m3) | 20.0 |
| Permeability coefficient (m/s) | 1 × 10−4 |
| Void ratio e | 0.67 |
| Peak friction angle φ | 43° |
| Poisson’s ratio μ | 0.3 |
| Cohesion c | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Wang, R.; Zhang, J.-M. Solid-Fluid Coupled Numerical Analysis of Suction Caisson Installation in Sand. J. Mar. Sci. Eng. 2021, 9, 704. https://doi.org/10.3390/jmse9070704
Wang H, Wang R, Zhang J-M. Solid-Fluid Coupled Numerical Analysis of Suction Caisson Installation in Sand. Journal of Marine Science and Engineering. 2021; 9(7):704. https://doi.org/10.3390/jmse9070704
Chicago/Turabian StyleWang, He, Rui Wang, and Jian-Min Zhang. 2021. "Solid-Fluid Coupled Numerical Analysis of Suction Caisson Installation in Sand" Journal of Marine Science and Engineering 9, no. 7: 704. https://doi.org/10.3390/jmse9070704
APA StyleWang, H., Wang, R., & Zhang, J.-M. (2021). Solid-Fluid Coupled Numerical Analysis of Suction Caisson Installation in Sand. Journal of Marine Science and Engineering, 9(7), 704. https://doi.org/10.3390/jmse9070704