When it comes to the combination of two sinusoidal motions, one should keep in mind that the phase of sinusoidal motion has two important factors, namely the frequency and the initial phase. This section focuses on the impact of combined pitch–surge motion with the same frequency on the aerodynamic performance of wind turbines, considering two motions with equal initial phases and different initial phases. For simplicity of notation, the combined motion of surge and pitch with equal initial phases is denoted as same-phase combined motion, and the combined motion of surge and pitch with different initial phases is denoted as combined motion with phase difference.
4.1. Same-Phase Combined Motion
Given a prescribed combination of surge and pitch motion, the specific form is defined as follows:
where
,
are the pitch and surge motion as defined above. The phases of the two motions are equal all the time when the two motions have the same frequency and initial phase. Then the absolute speed of the hub center can be written as:
where
refers to the motion frequency,
refers to the height of the hub above sea level.
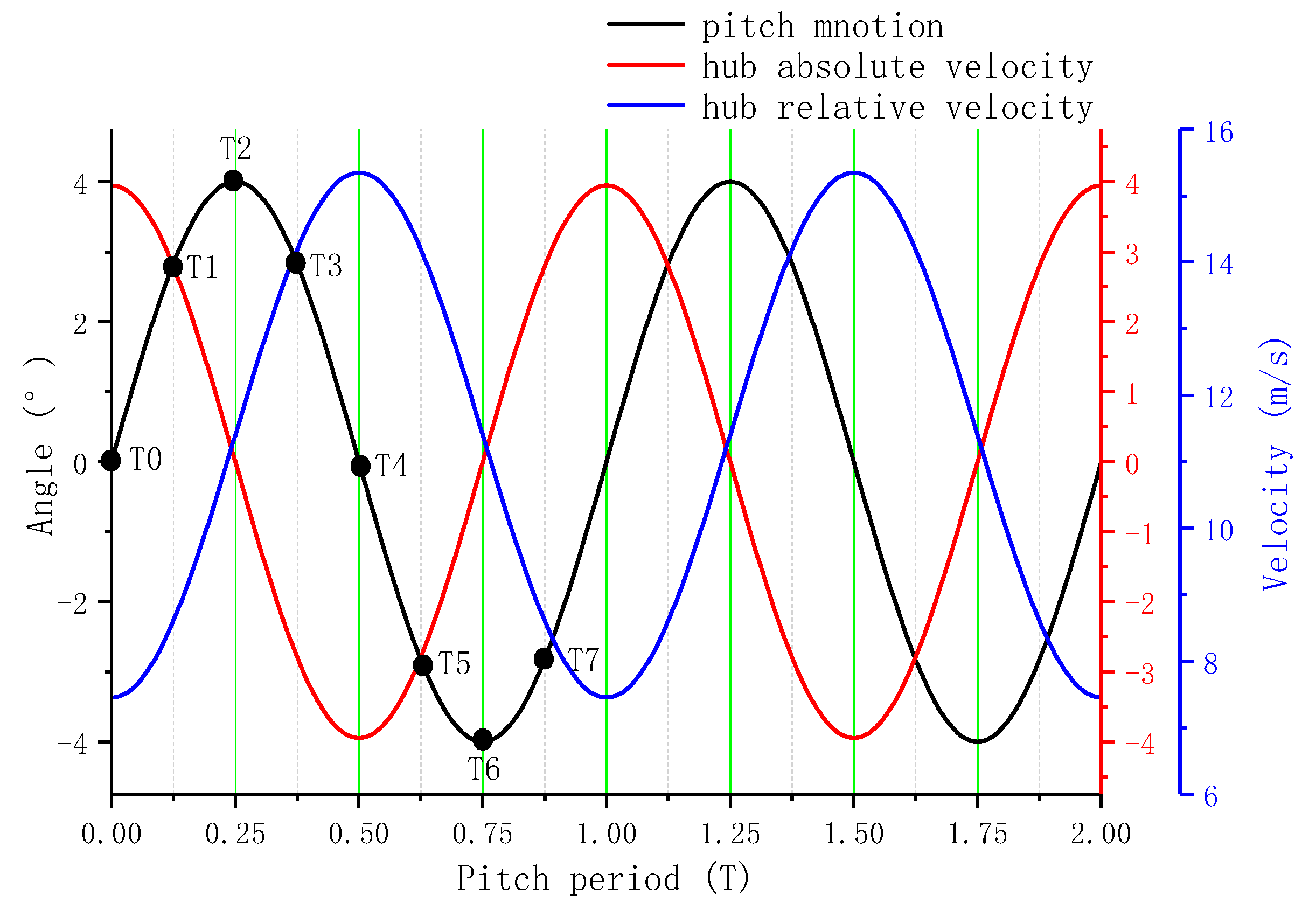
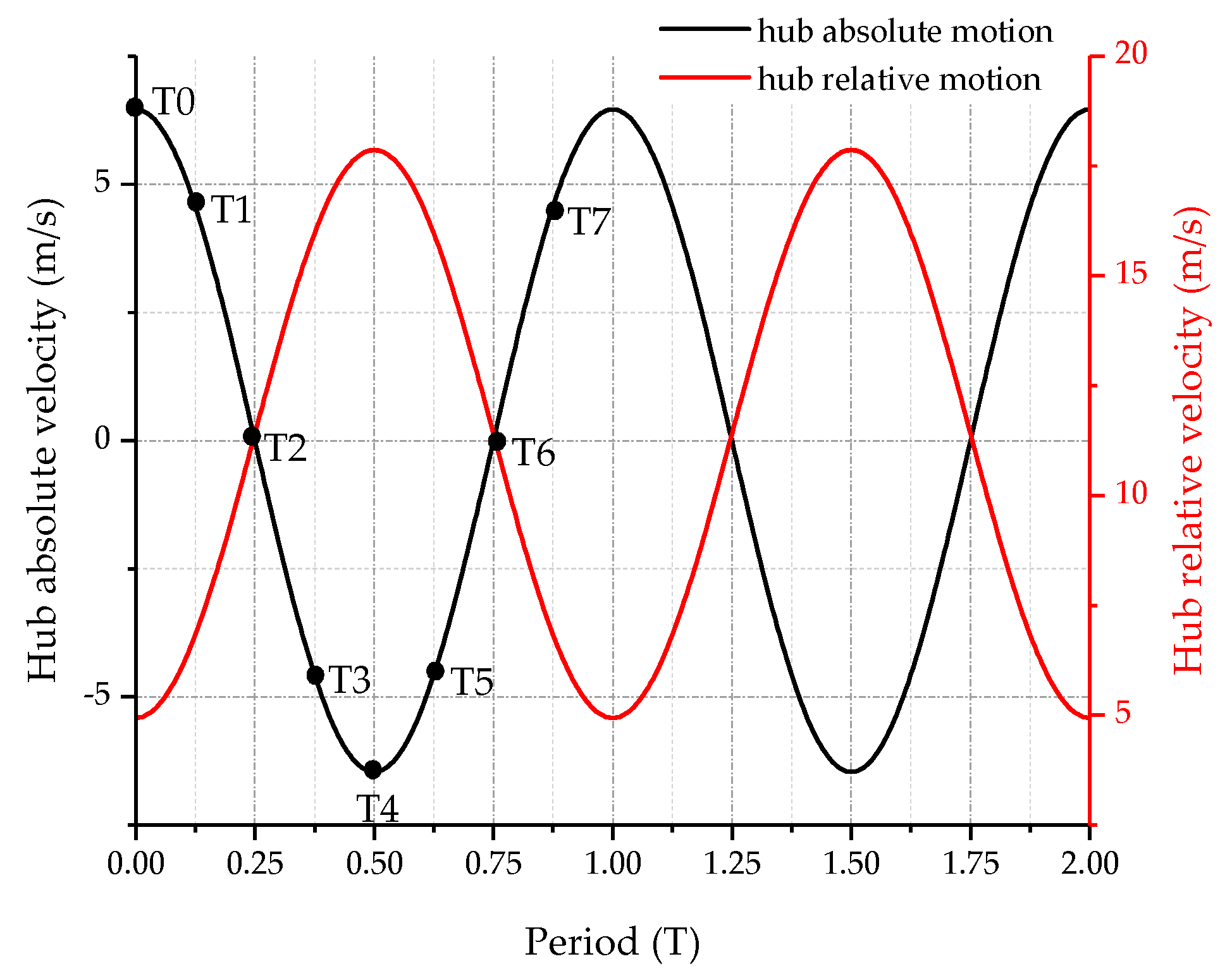
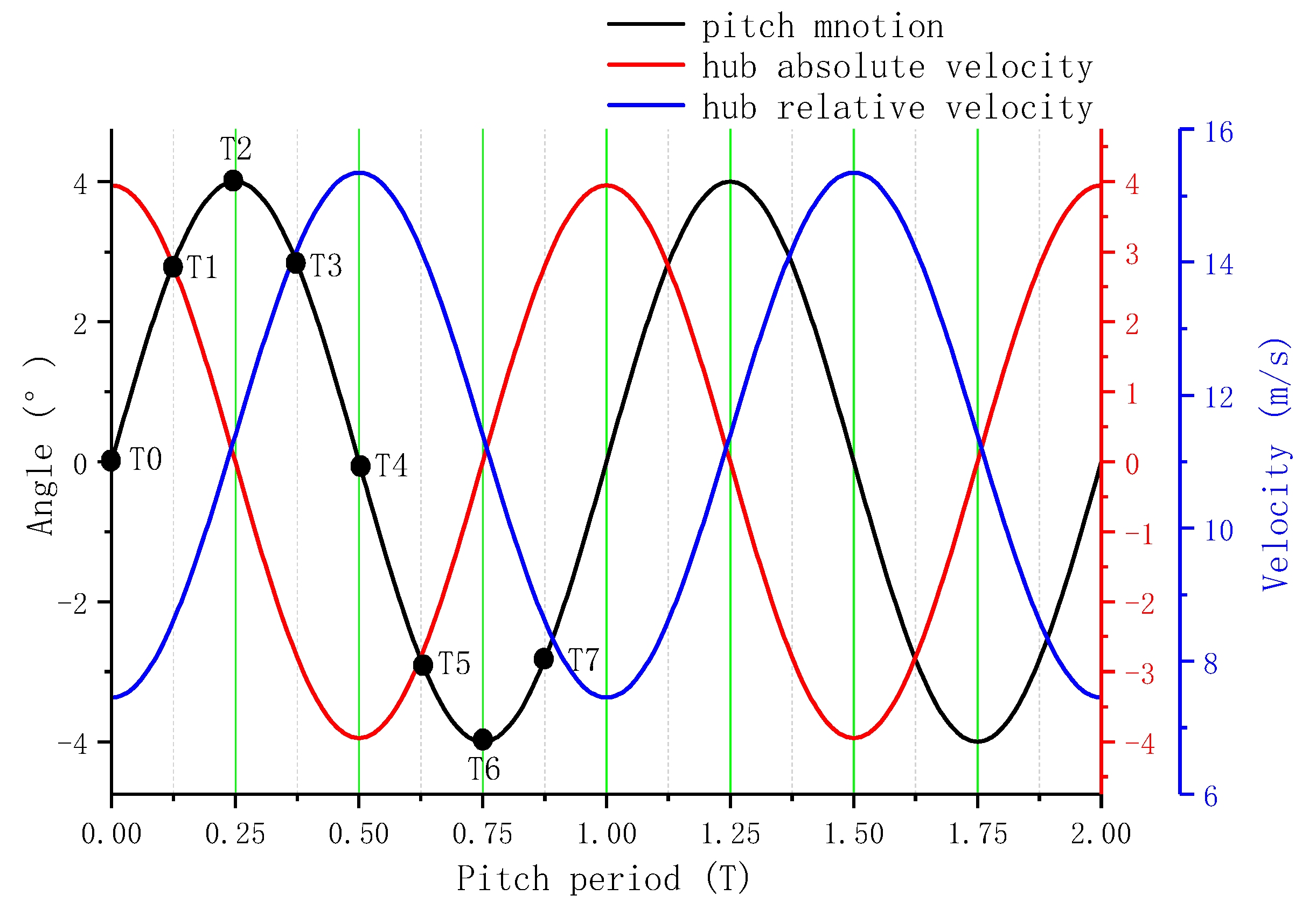
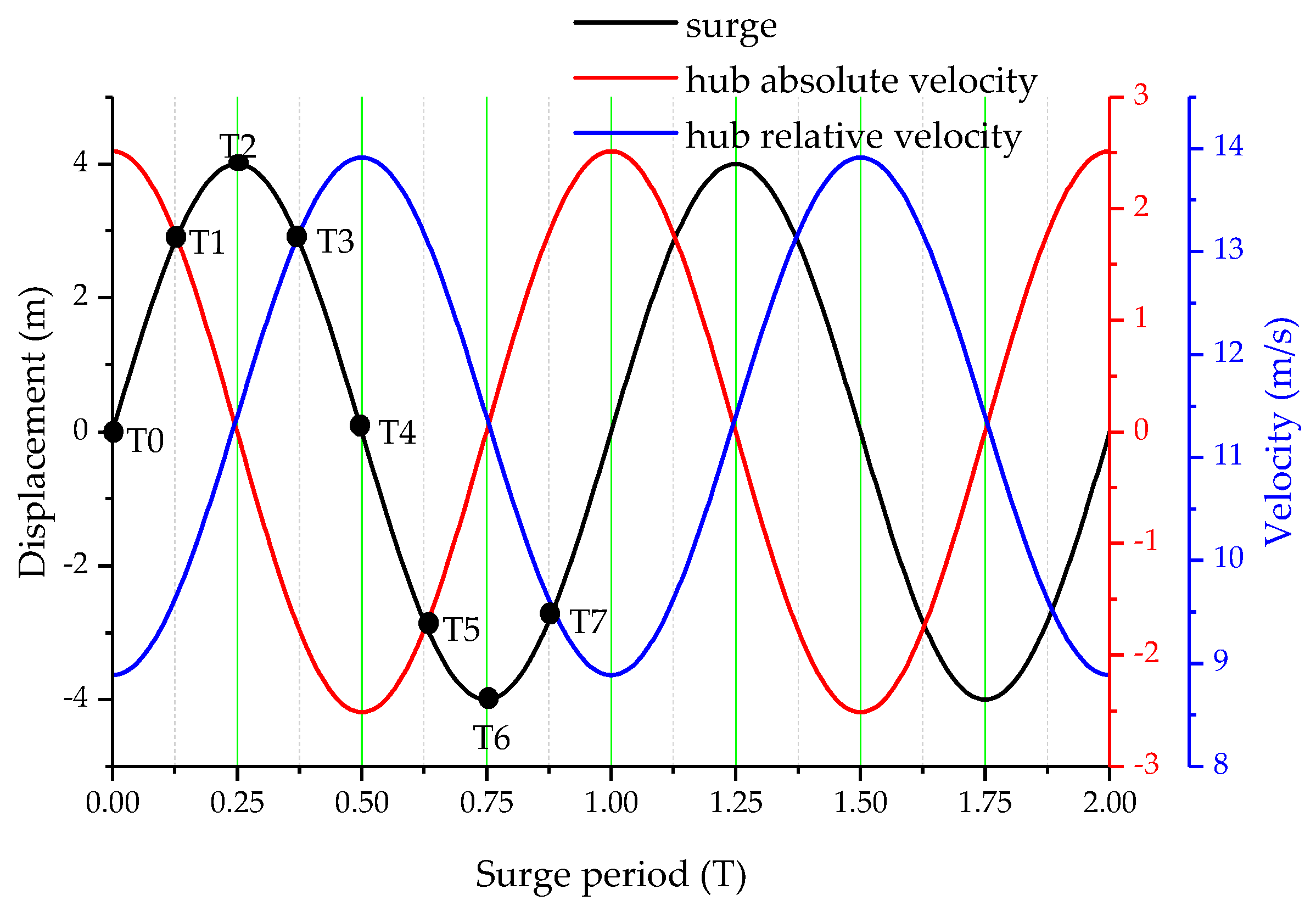
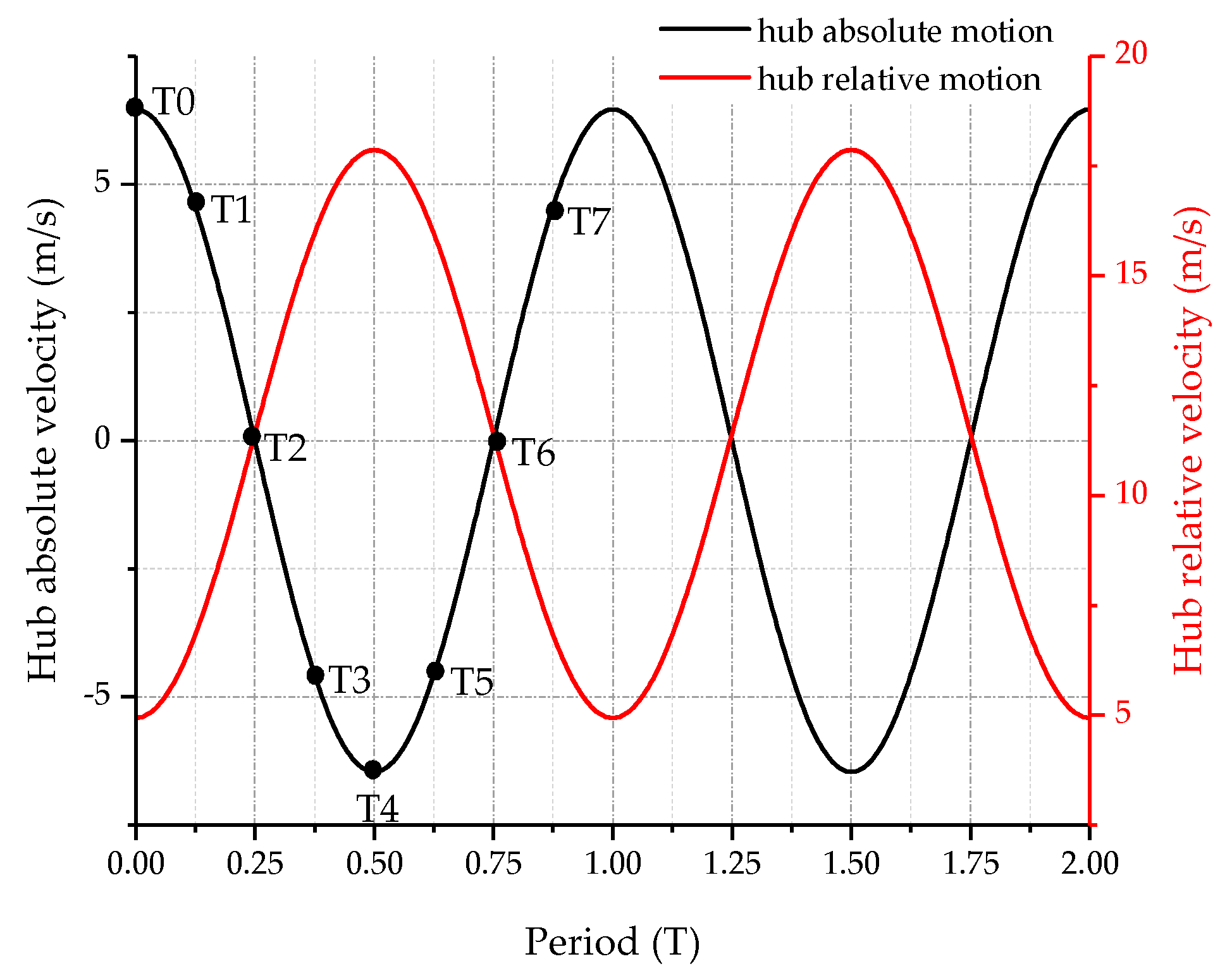
Figure 13 shows the combined motion under
= 4°,
= 4 m,
= 0.1 Hz. The absolute speed curve is shown in black, with the maximum absolute speed of approximately 6.46 m/s at T0 moment; the relative inflow wind speed at the hub is shown in red, with the maximum value of approximately 17.8 m/s at T4 moment. The simulation cases are the combination of single motion cases, as summarized in
Table 6.
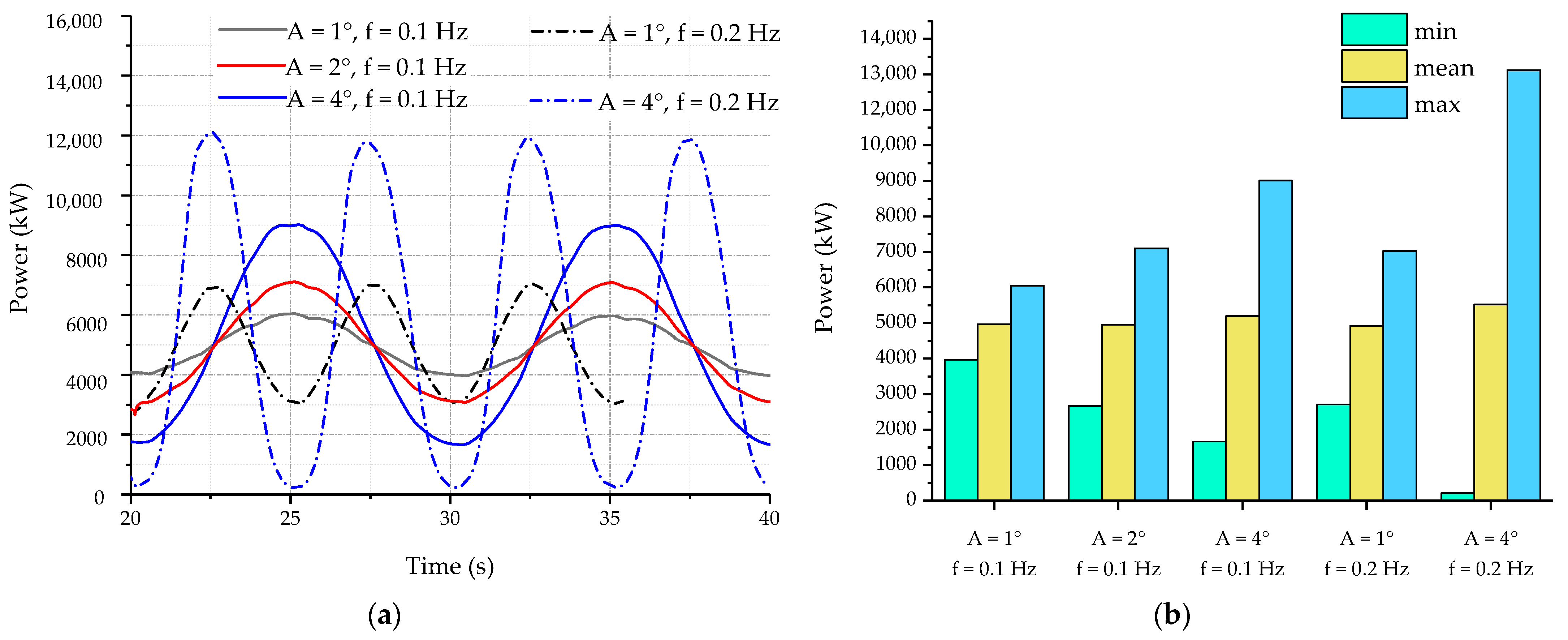
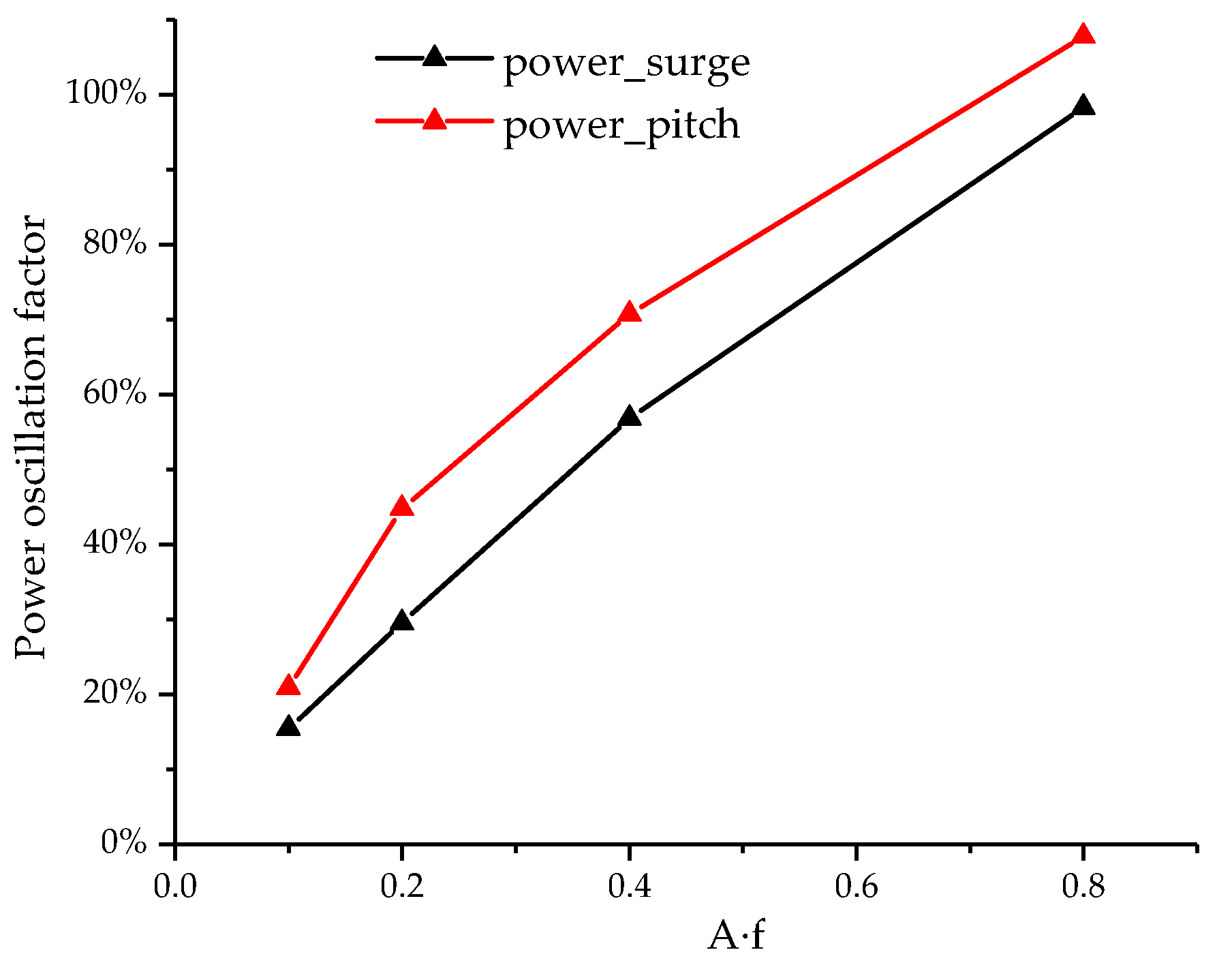
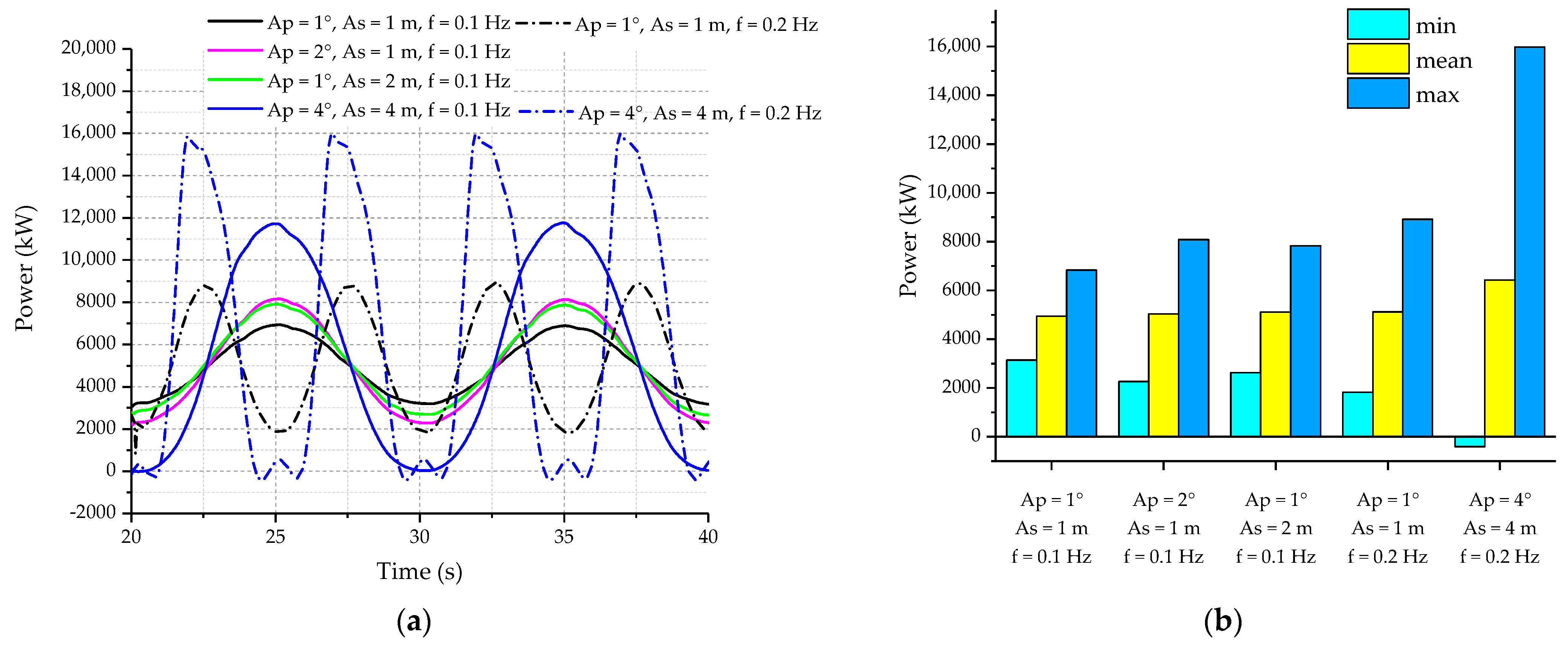
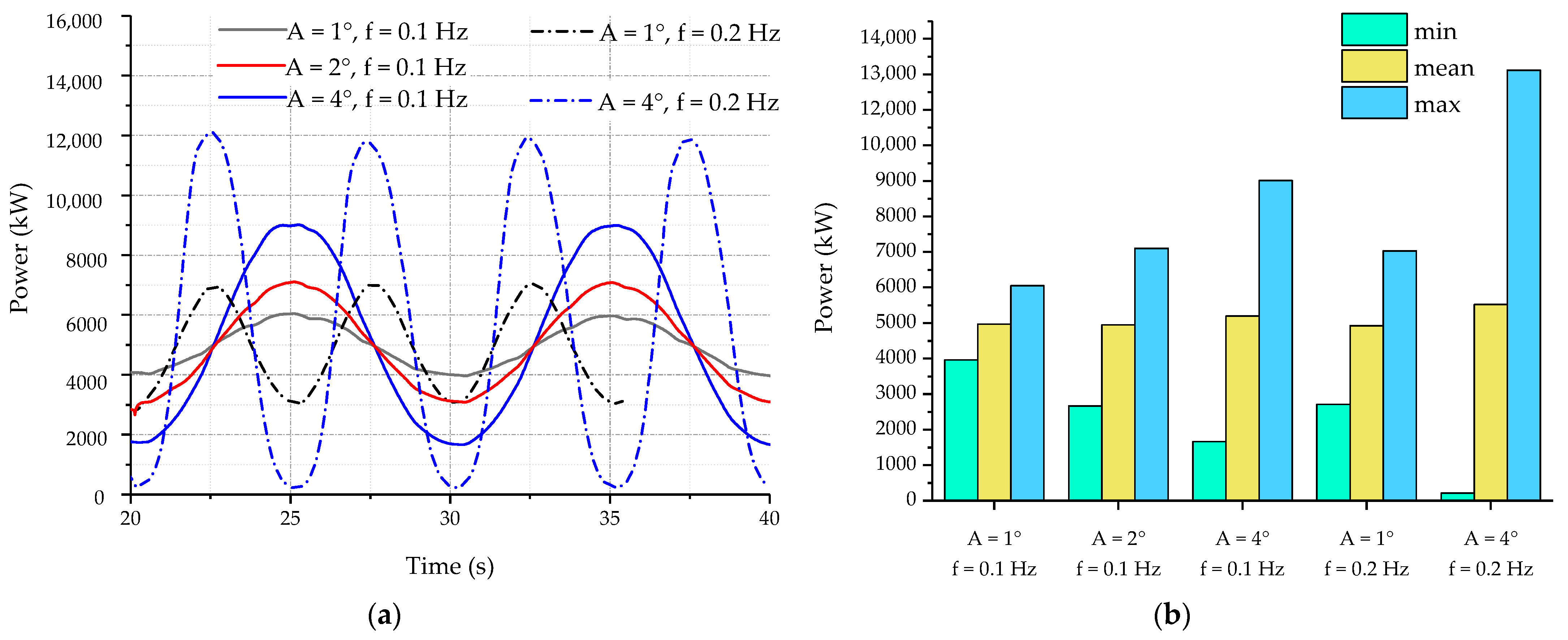
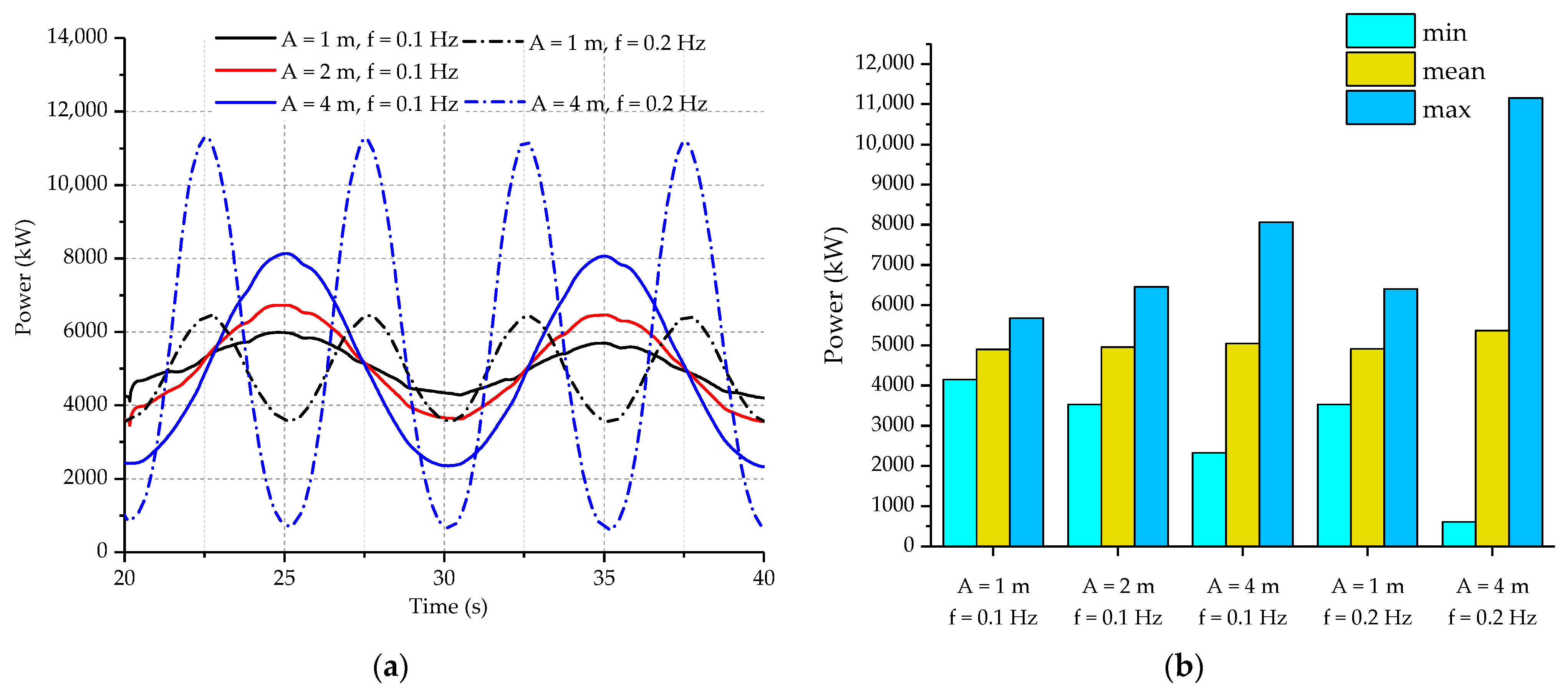
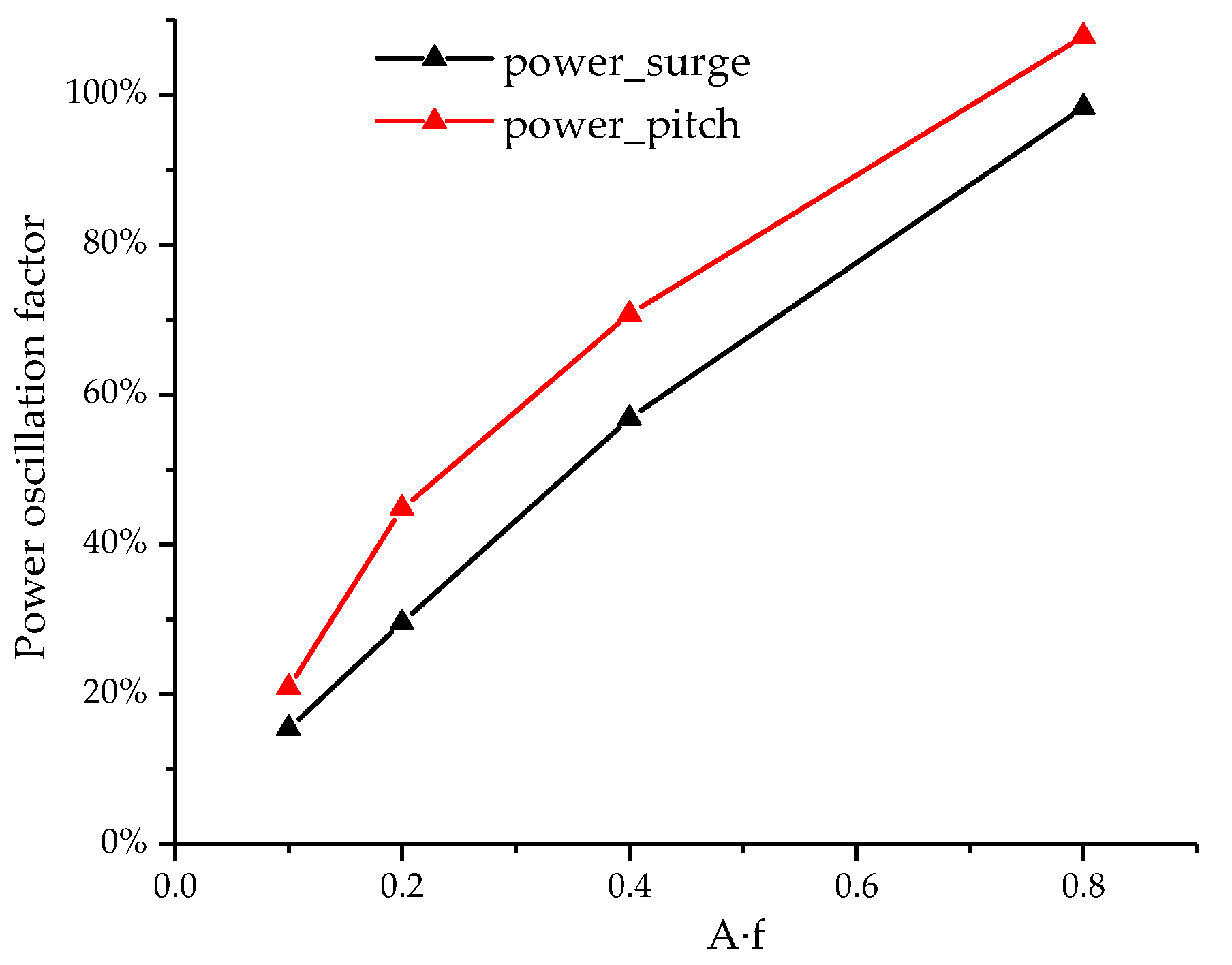
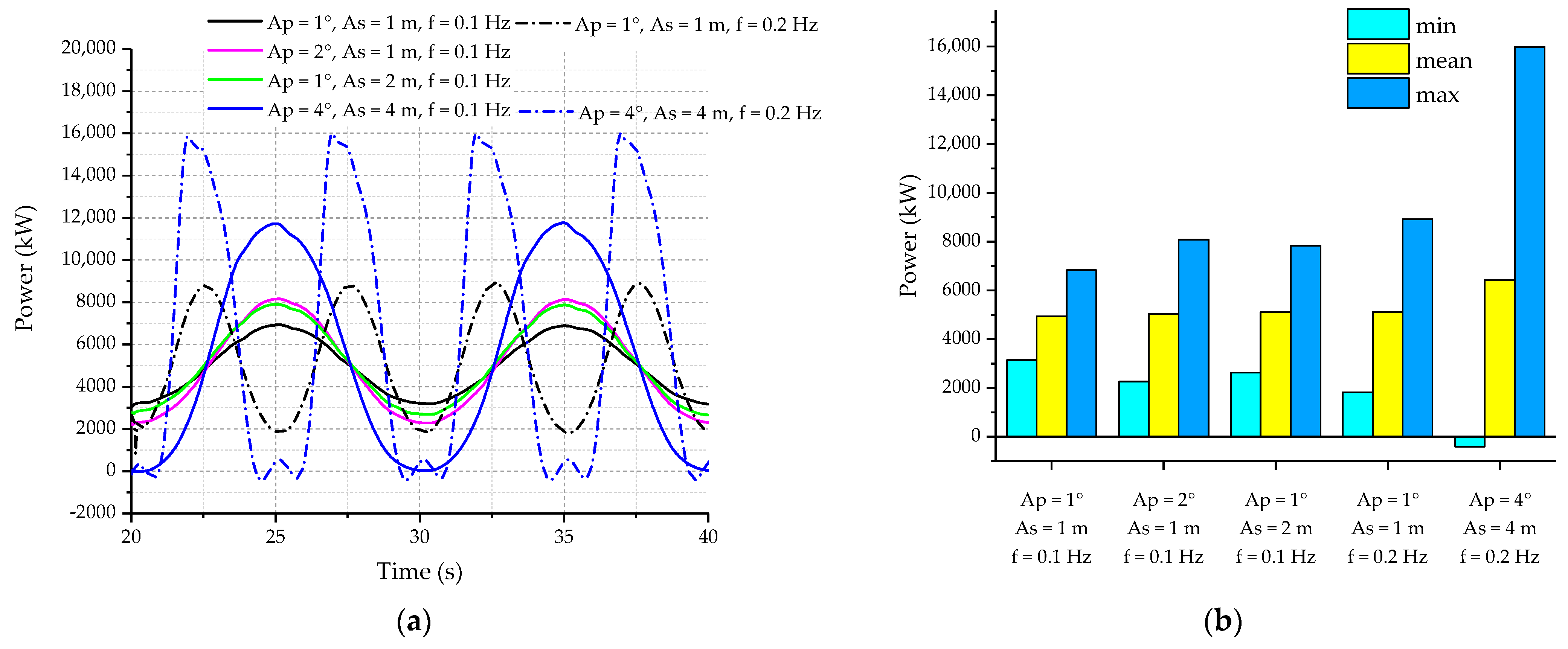
The wind turbine power under the same-phase combined motion is presented in
Table 6 and
Figure 14. One can notice that the same-phase combined motion aggravates the unsteady aerodynamic load characteristics of the wind turbine. The maximum power of combined motion is greater than that of either single motion under the same amplitude and frequency. The power oscillation factor of the combined motion is approximately equal to the algebraic sum of that of each sub-motion. Comparing the results of case 12 and case 13, it is obvious that the power oscillation under case 13 is more severe, which indicates that doubling the pitch amplitude has a greater impact than doubling the surge amplitude. Case 16 shows the occurrence of negative power, which is due to the negative relative inflow wind speed in this state.
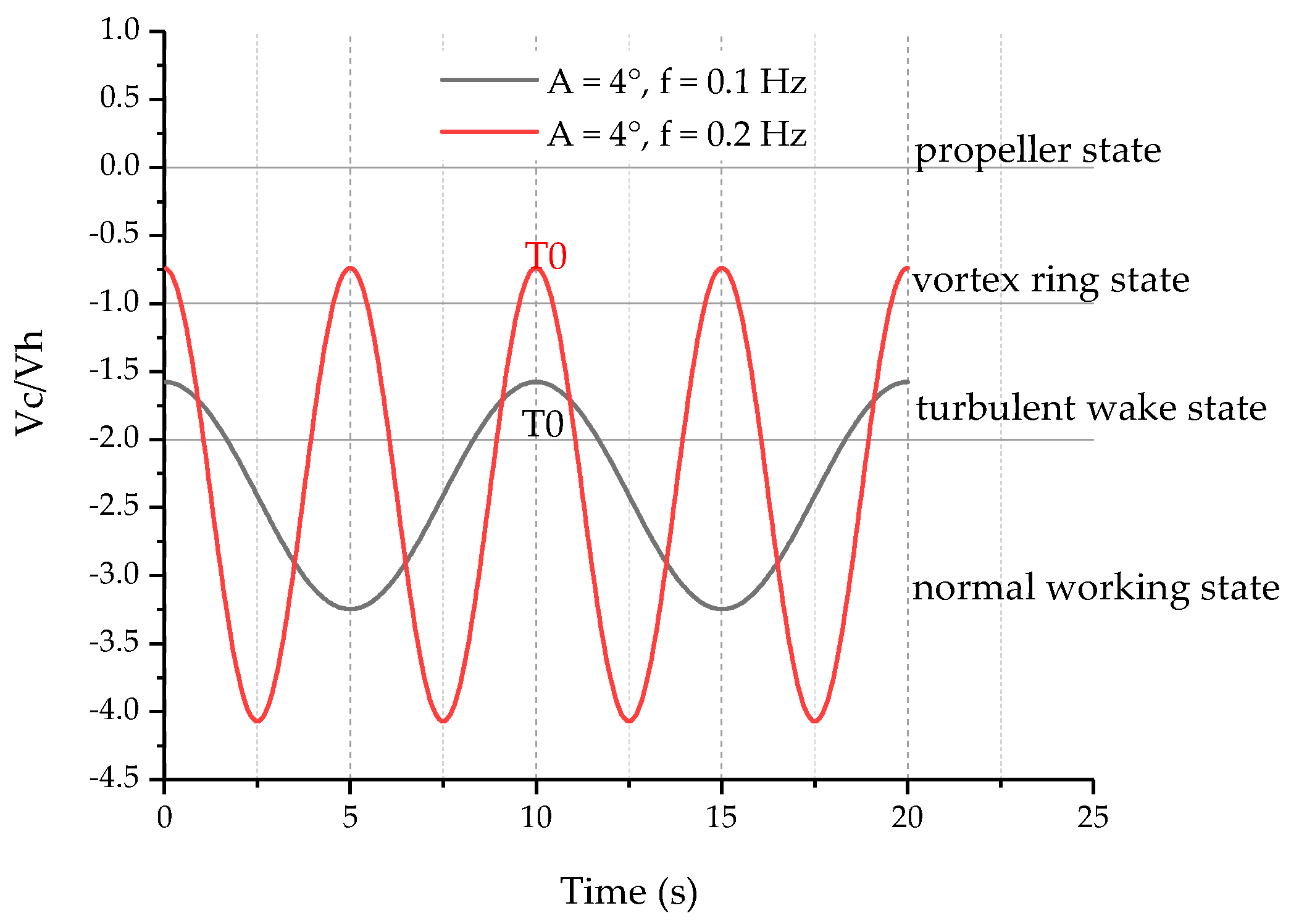
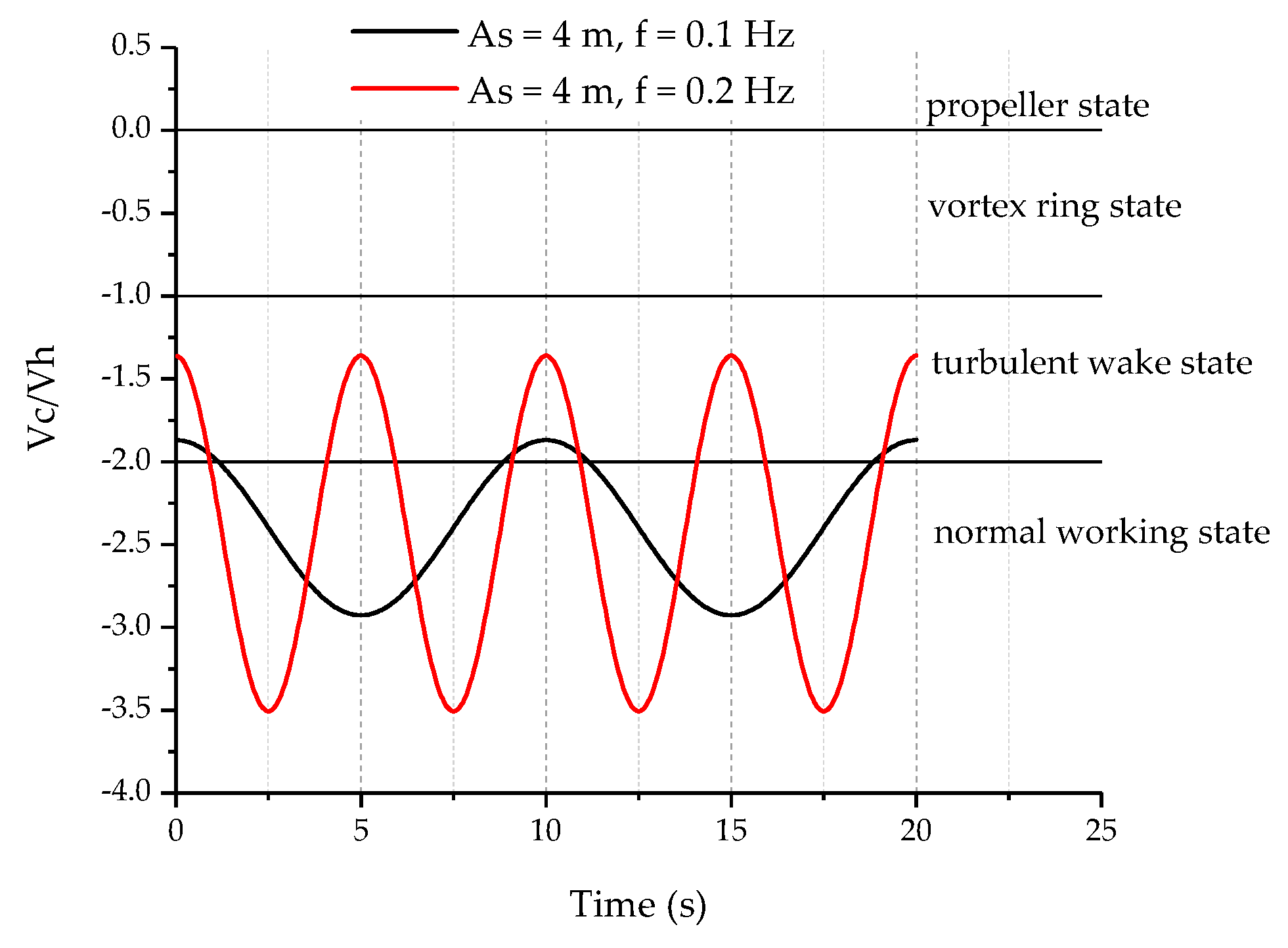
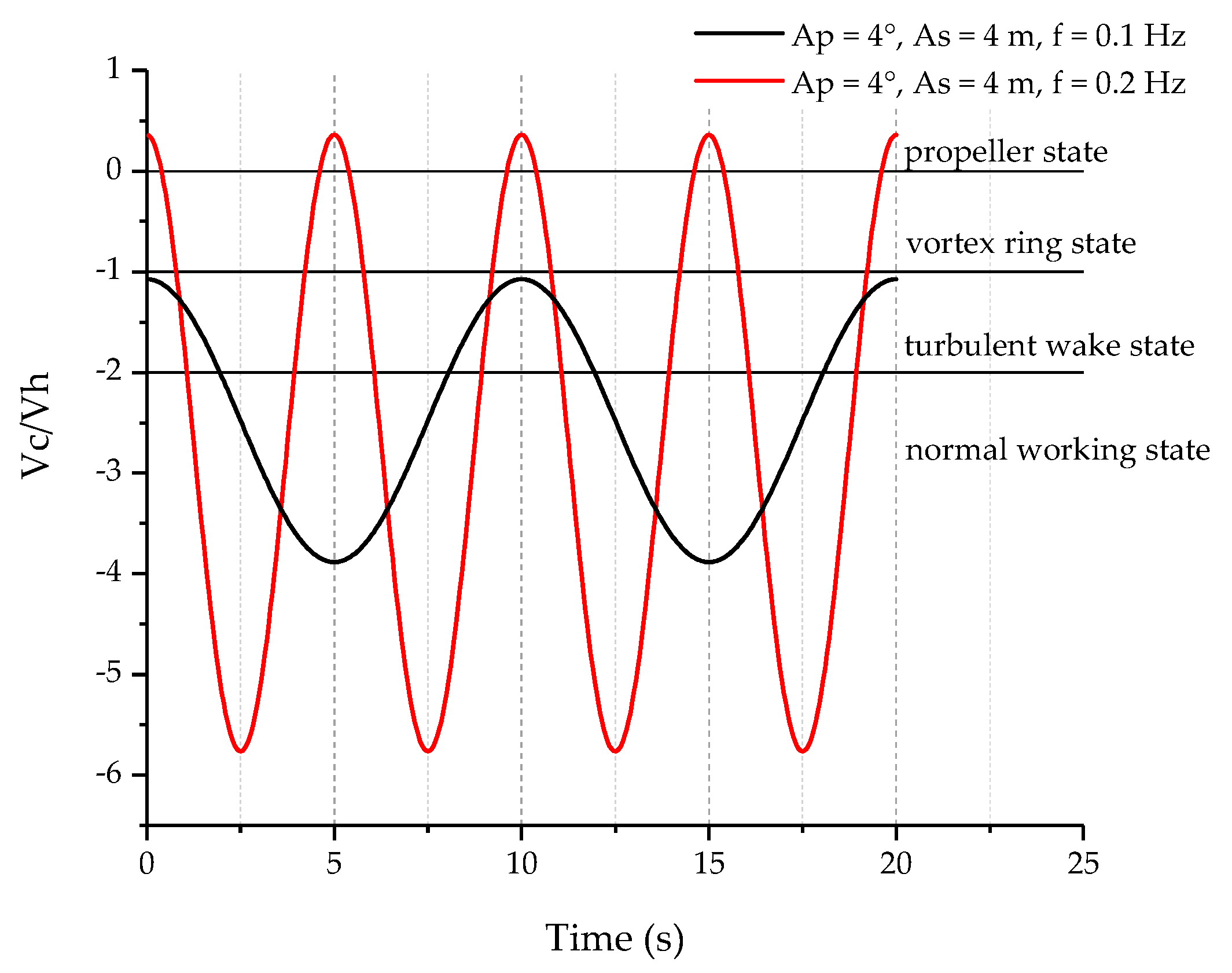
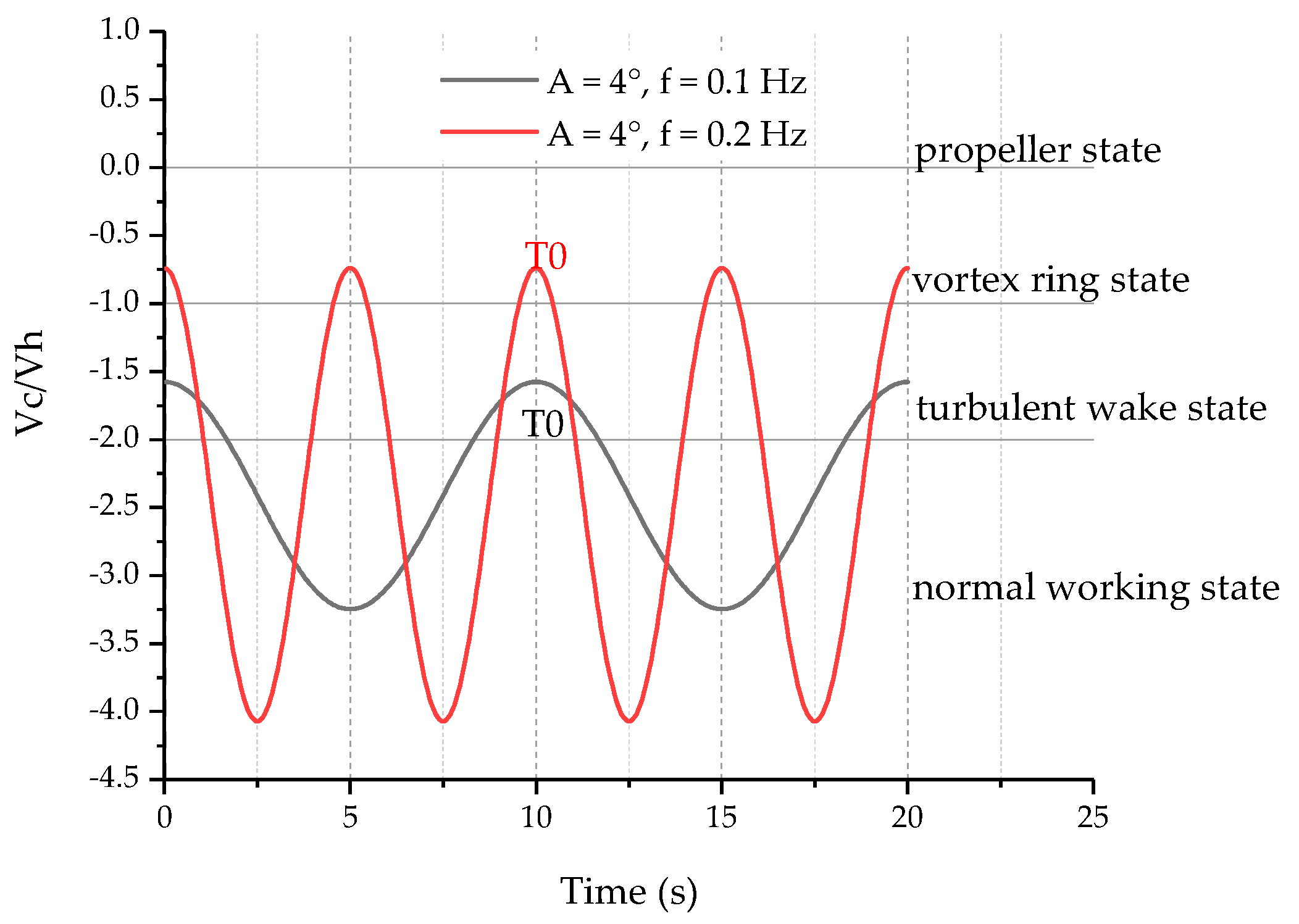
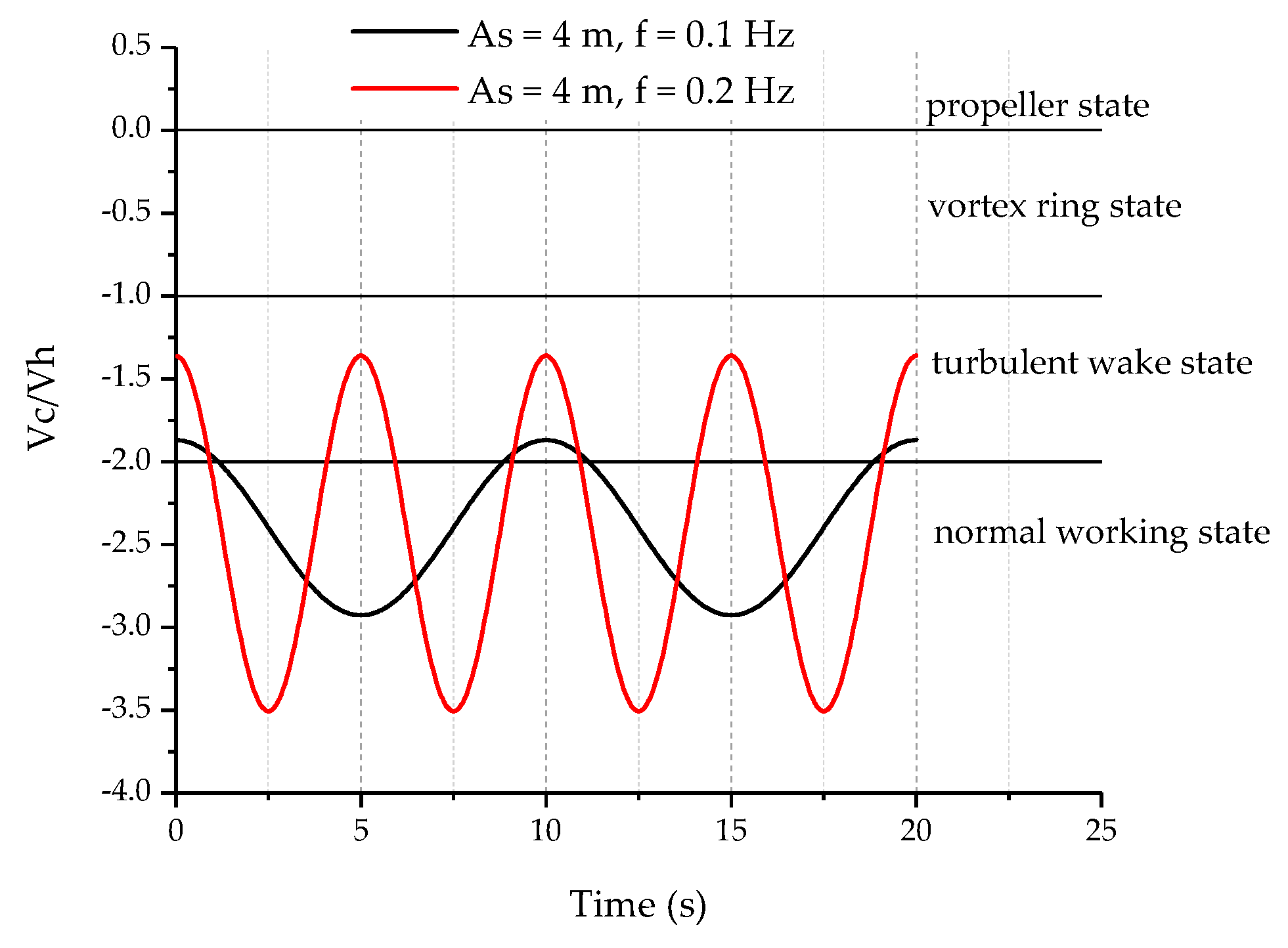
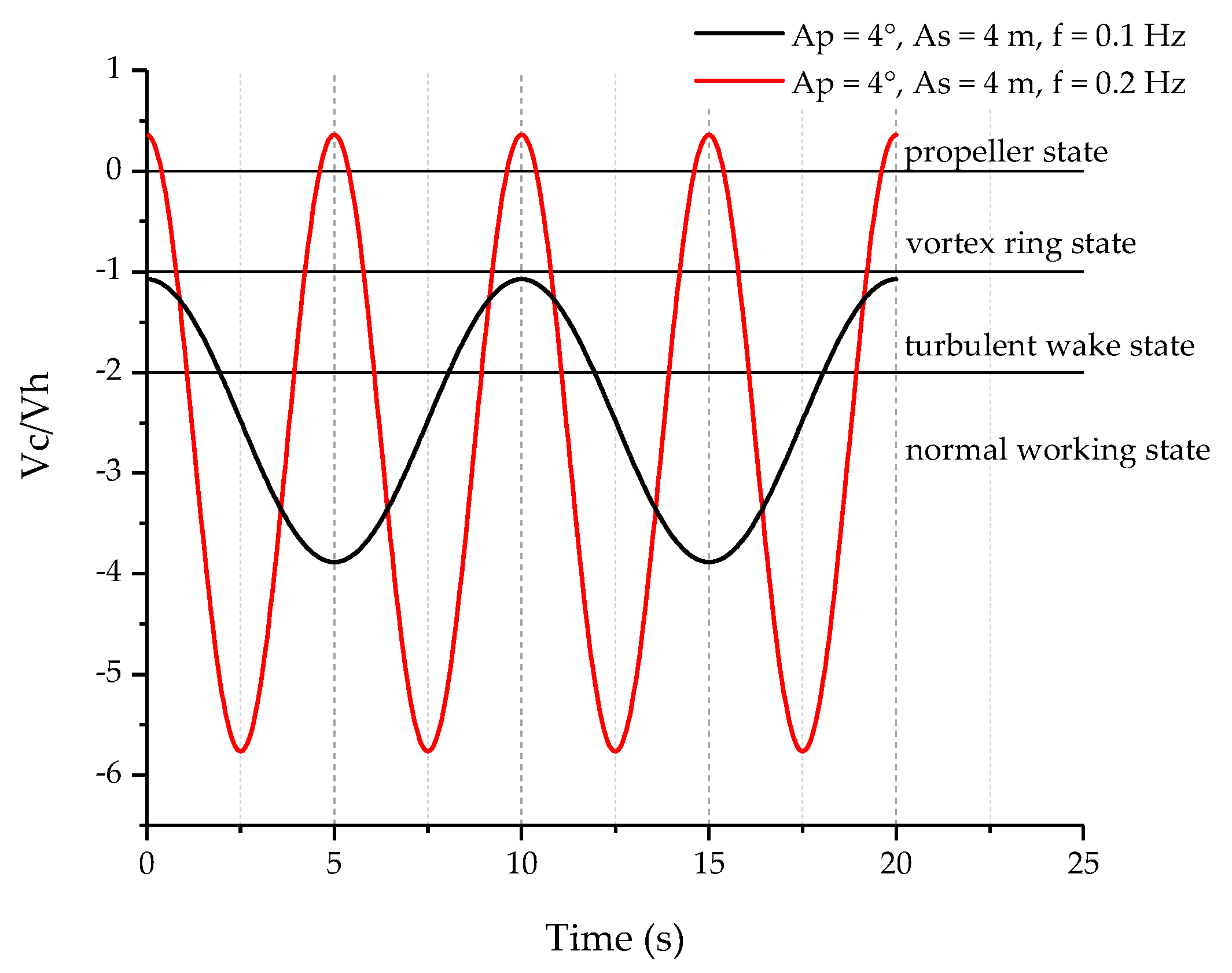
The speed ratio of case 14 and case 16 is shown in
Figure 15. Under case 14 (
,
,
), the wind turbine experiences two states and is on the edge of the vortex ring state. Under case 16 (
,
,
), the wind turbine experiences four states.
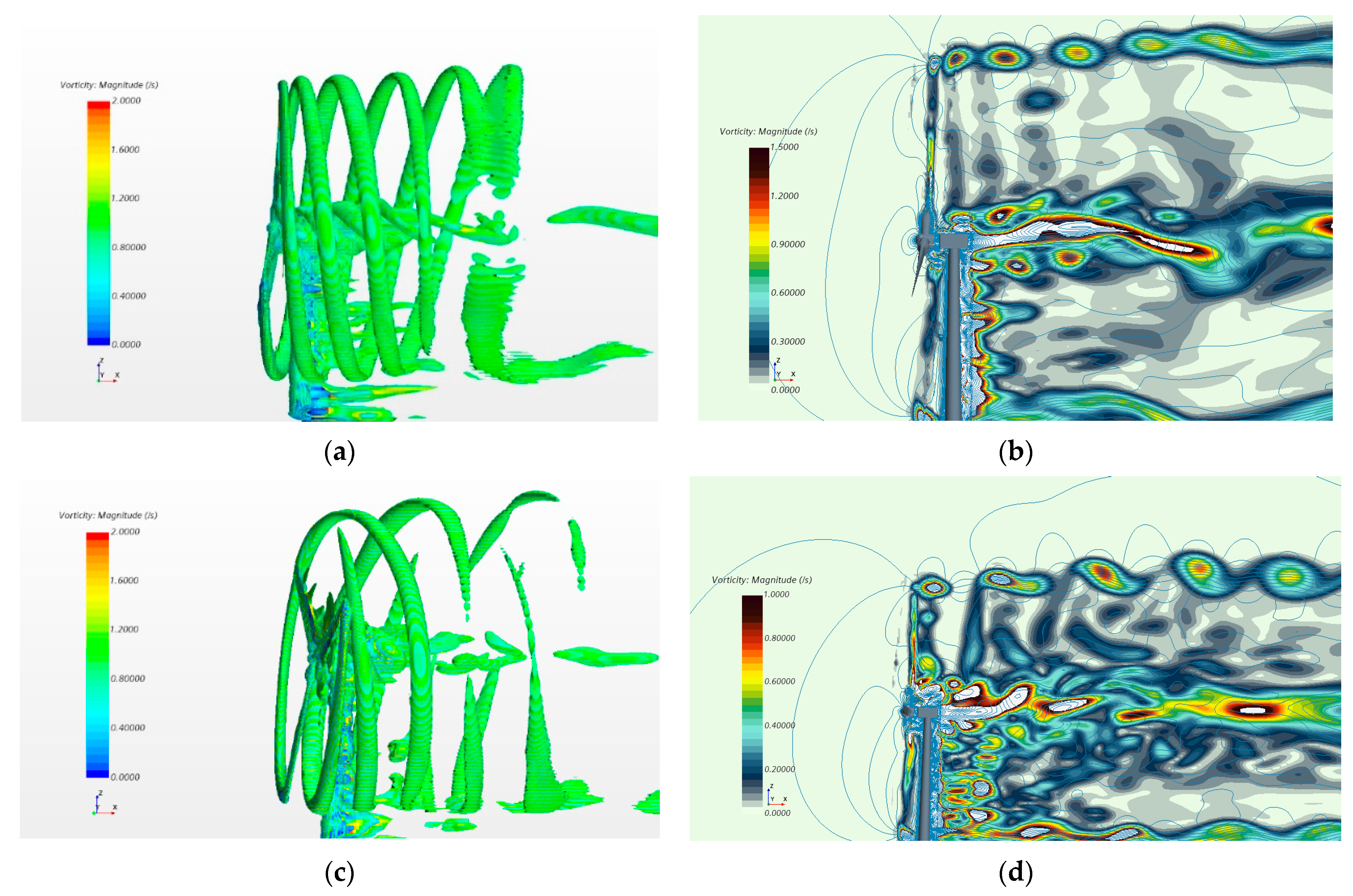
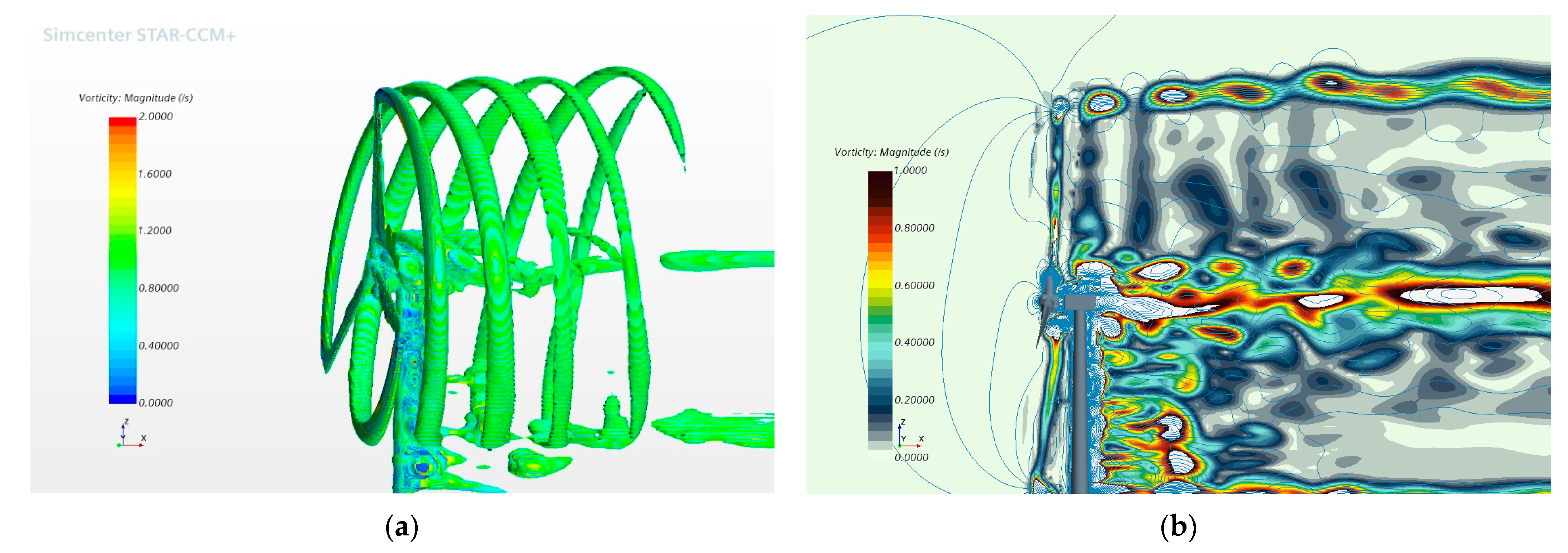
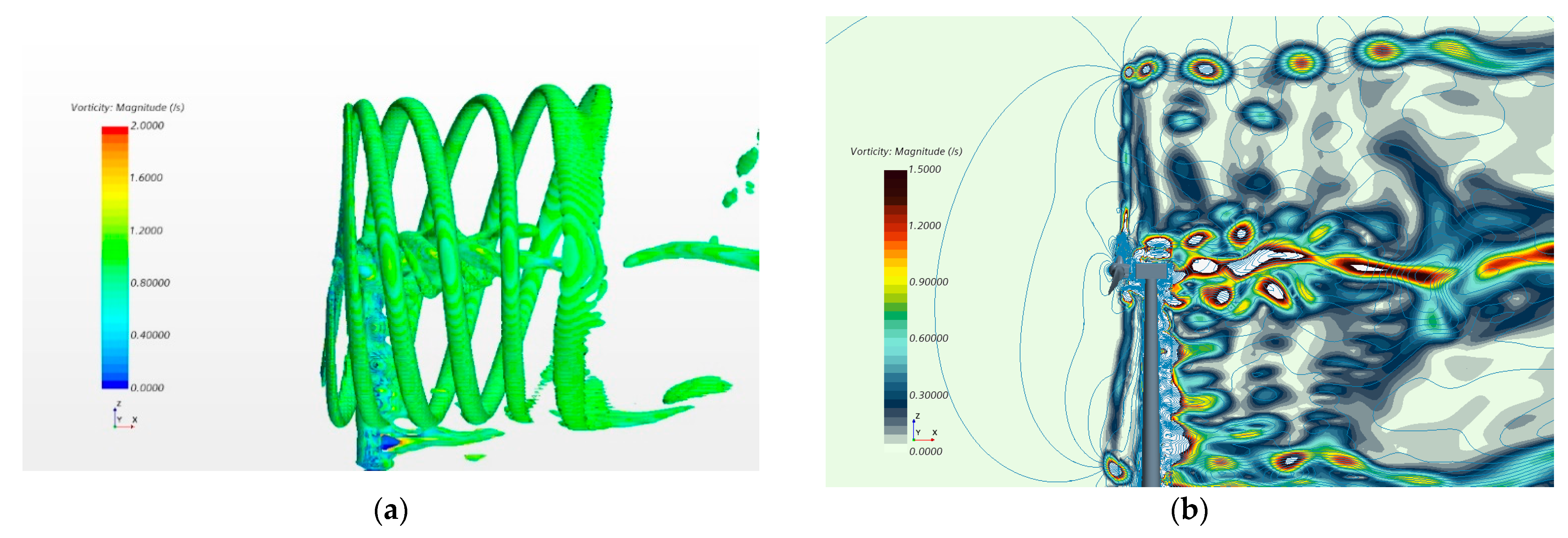
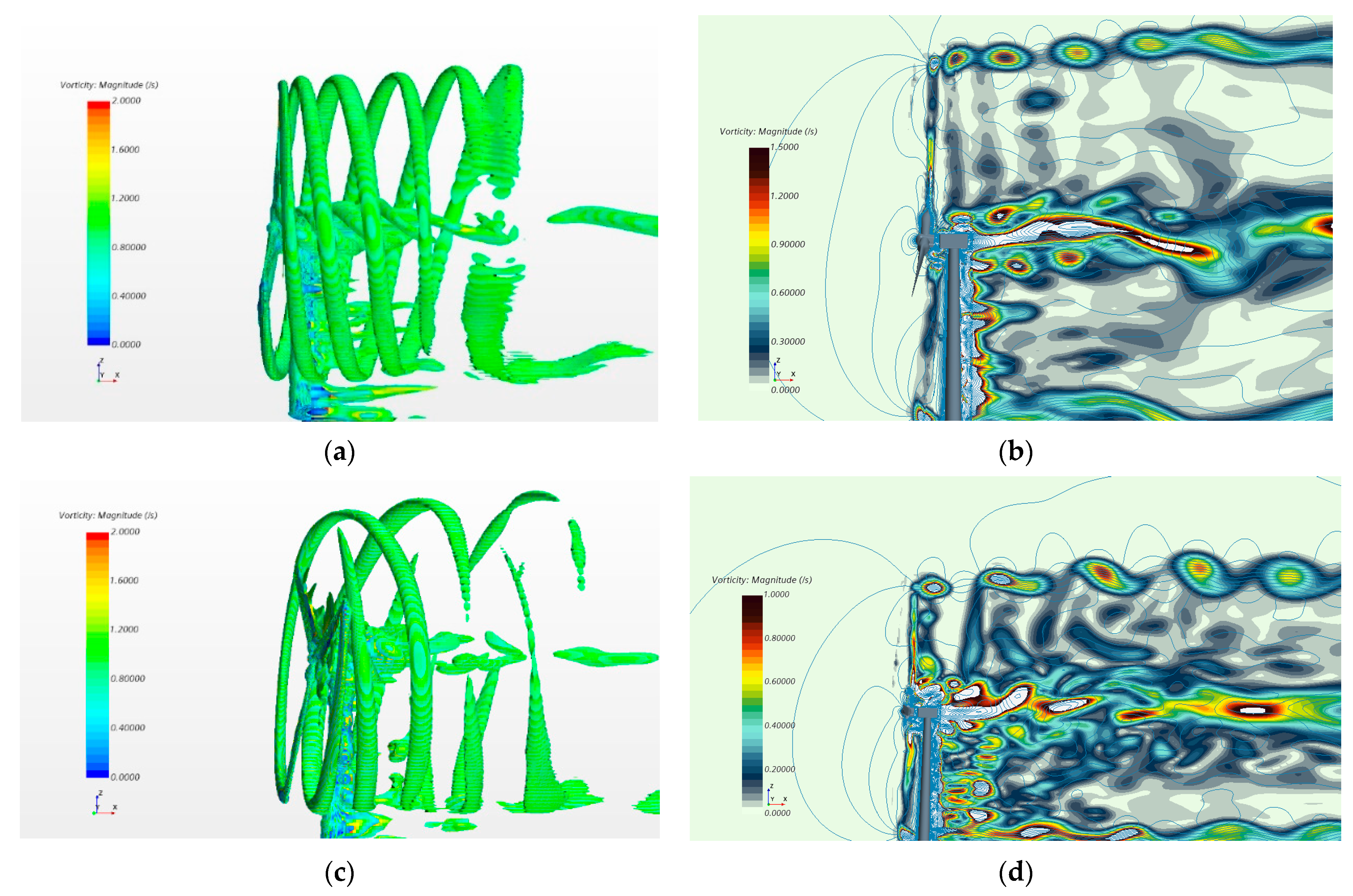
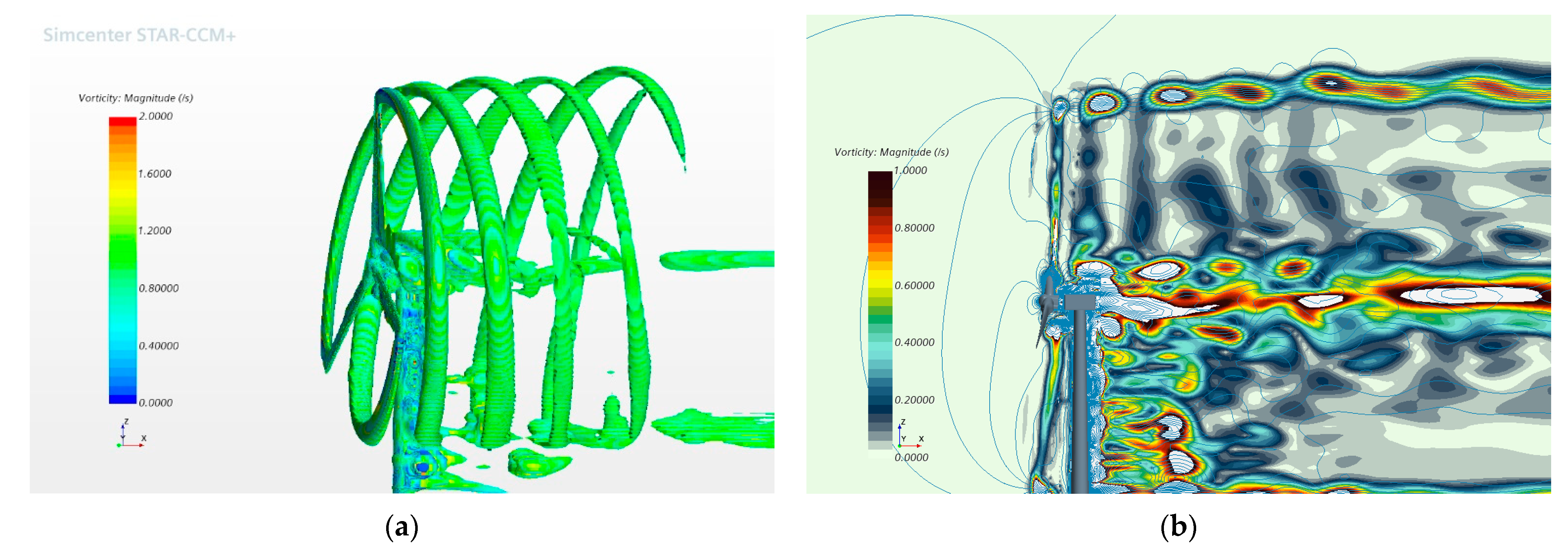
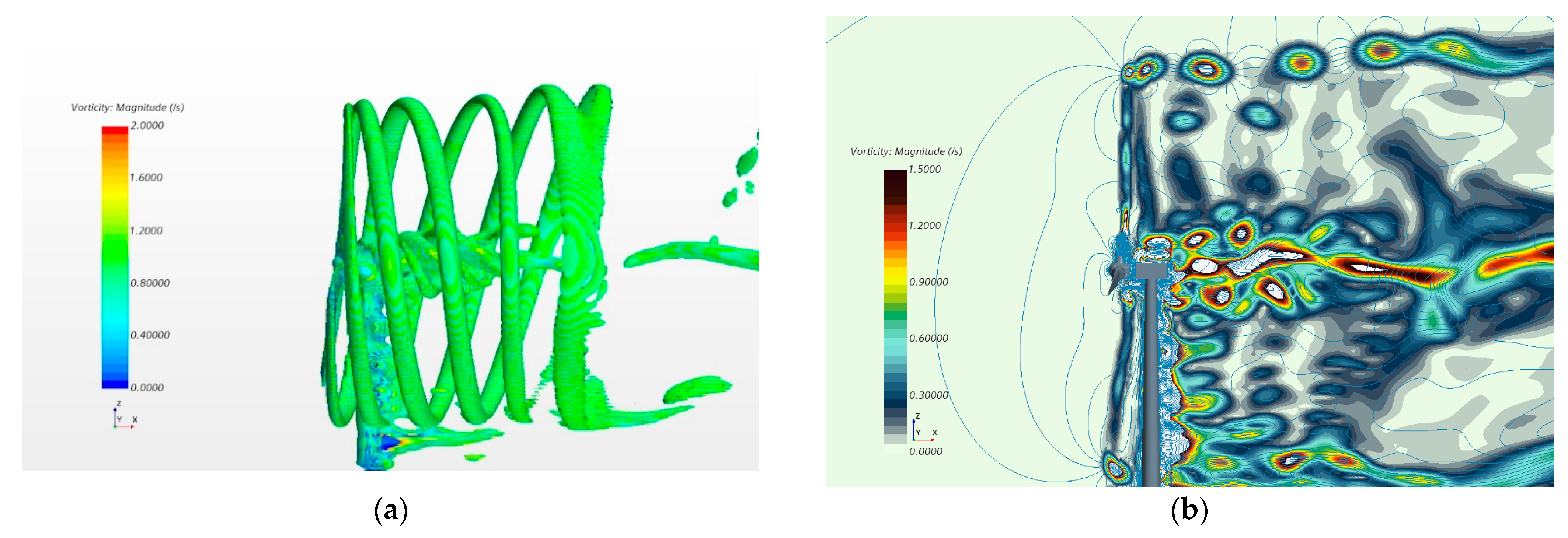
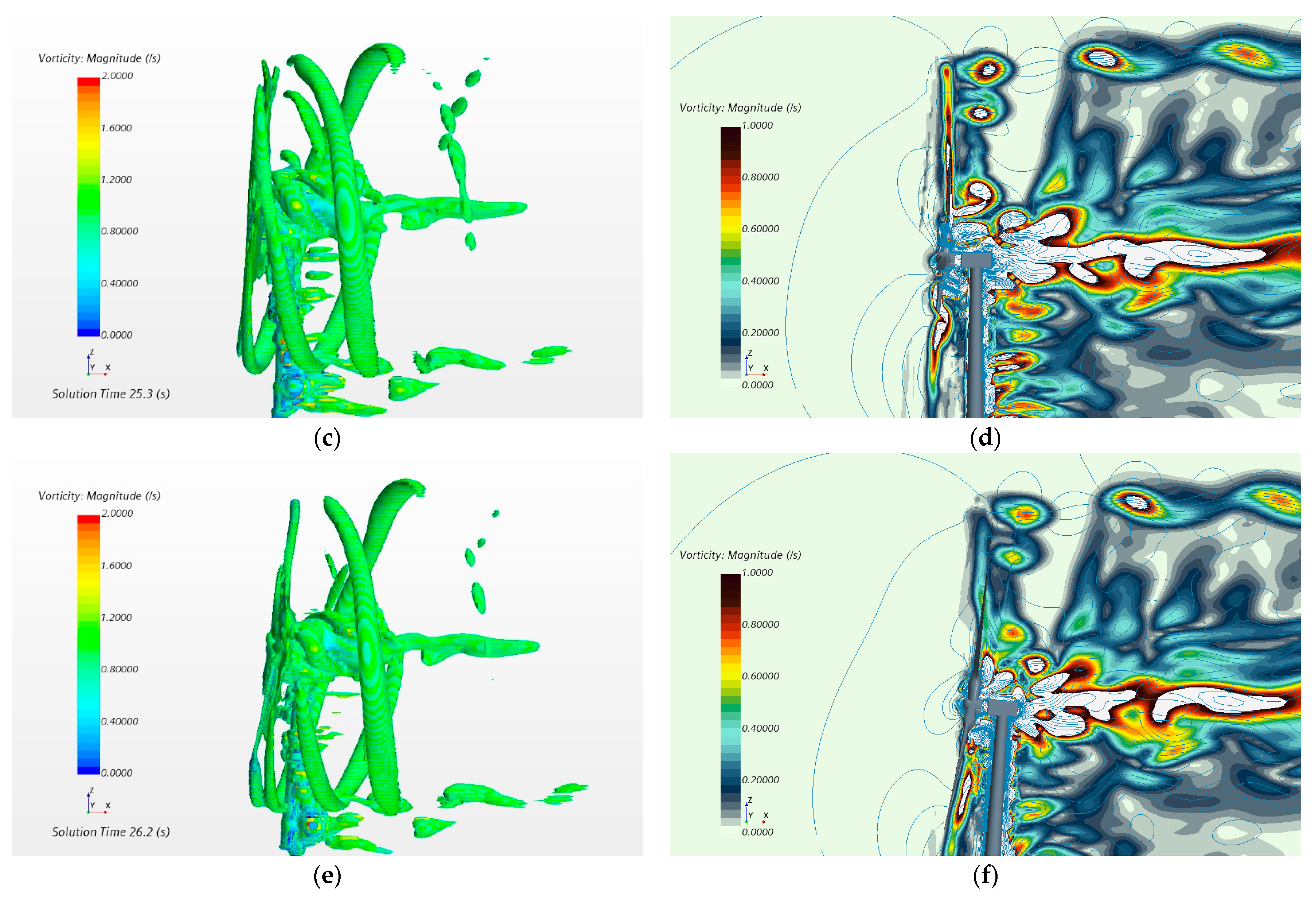
Figure 16 a,b depict the iso-surface of the vortex near the T0 moment under case 14. It is obvious that at T0, the gap between two vorticities is close to zero, which is coherent with the analysis results of
Figure 15. The blades have strong turbulence effects but are not immersed in the wake vortex.
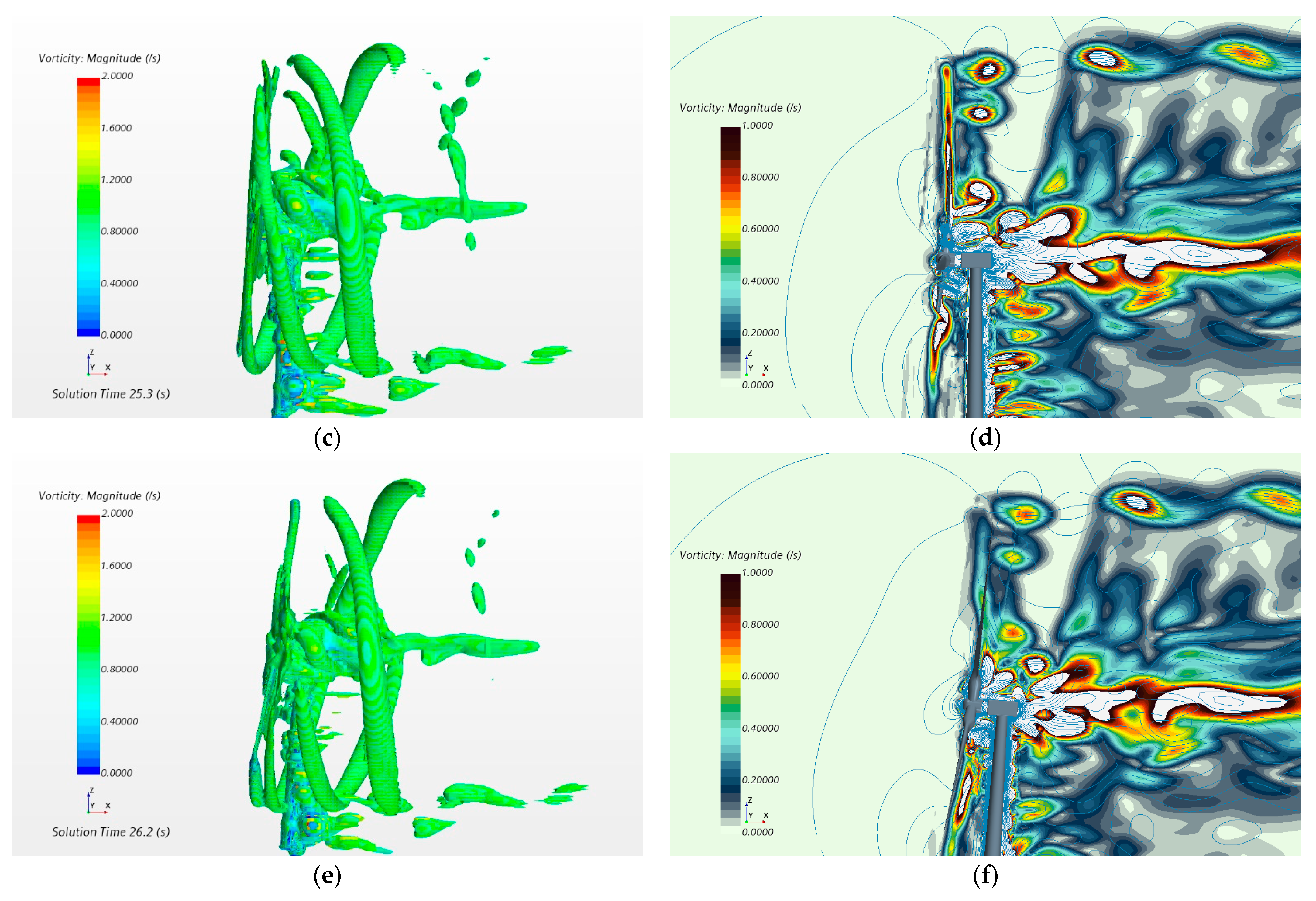
Figure 16c–f show the iso-surface of the vortex near the T0 and T2 moment under case 16. There is a visible event of strong blade vortex interaction at the tip, as anticipated. The blade tip has entered the vortex generated by the previous blade and disturbed the normal development of the vortex.
Figure 16c,e show that the wake vortex disturbed by the blade becomes extremely unstable, and then begins to break off and dissipate.
Figure 16d,f on the right clearly show that the upcoming vortex enters the penult vortex domain as the previous vortex has been destroyed, and the vortex disappears soon after being disturbed.
4.2. Combined Motion with Phase Difference
Generally, there will be a constant phase difference between pitch and surge motion under steady wind and regular waves [
28]. This steady-state phase difference comes from the phase difference between different wave excitation loads, and the phase difference between the excitation and response. At a certain wave frequency, the first-order wave excitation forces of surge and pitch DOFs can be expressed as:
The second-order hydrodynamics and coupling effects between motions are not considered in the following analysis. After linearization at the operating point, the surge and pitch motion can be considered as a second-order linear system with a single DOF, respectively [
36]. According to the phase-frequency characteristics of the second-order linear system, the phase lag between the displacement response and the excitation force can be calculated through Equation (12) [
37]:
where
denotes frequency ratio,
is the excitation frequency,
is the natural frequency;
denotes damping ratio,
is the system damping, and
is the mass or inertia.
Different types of floating platforms have different hydrodynamic characteristics and system inherent attributes. The platform in this paper refers to the OC4 semi-submersible floating platform designed by NREL [
38]. The hydrodynamic characteristic parameters of the system, such as the wave excitation force and the radiation damping at different frequencies, can be obtained through frequency analysis in the ANSYS-AQWA software.
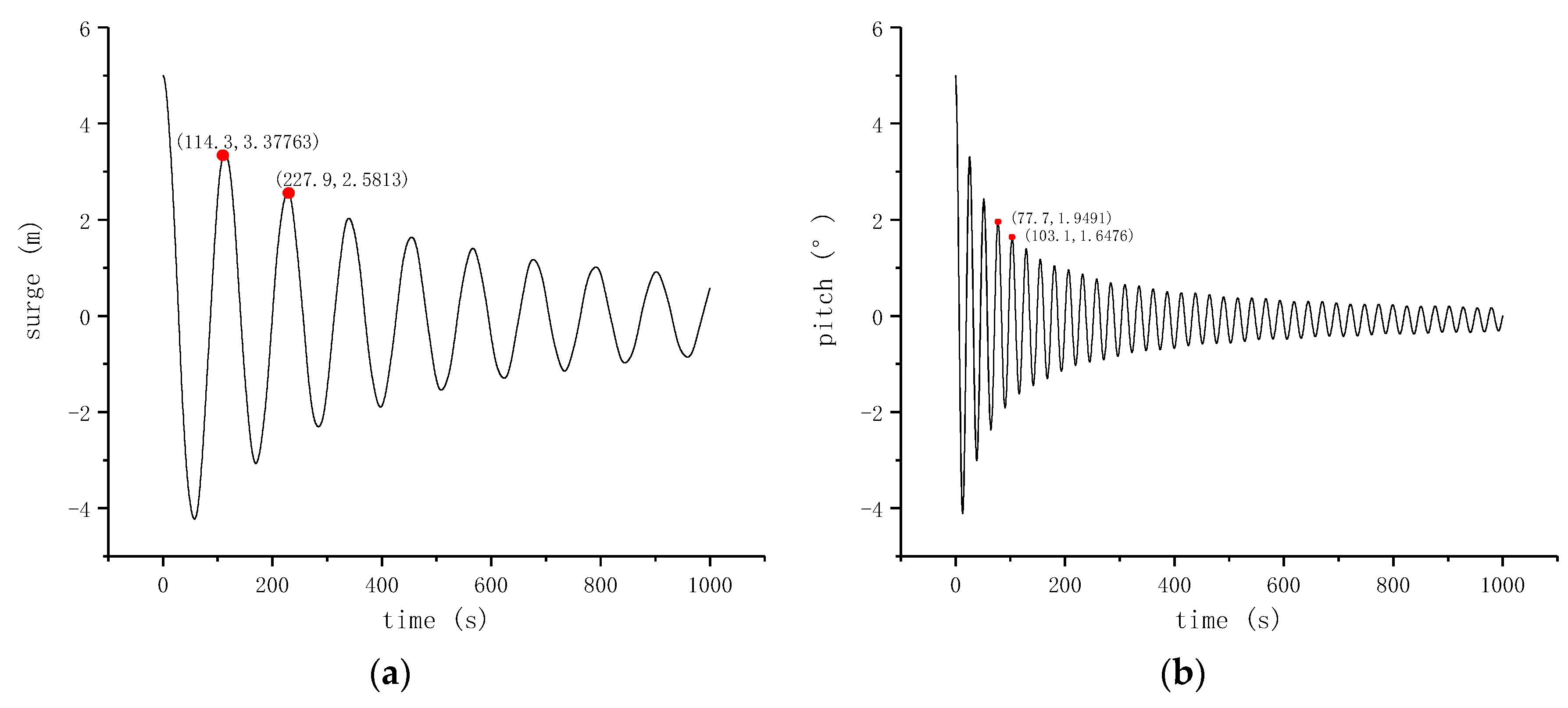
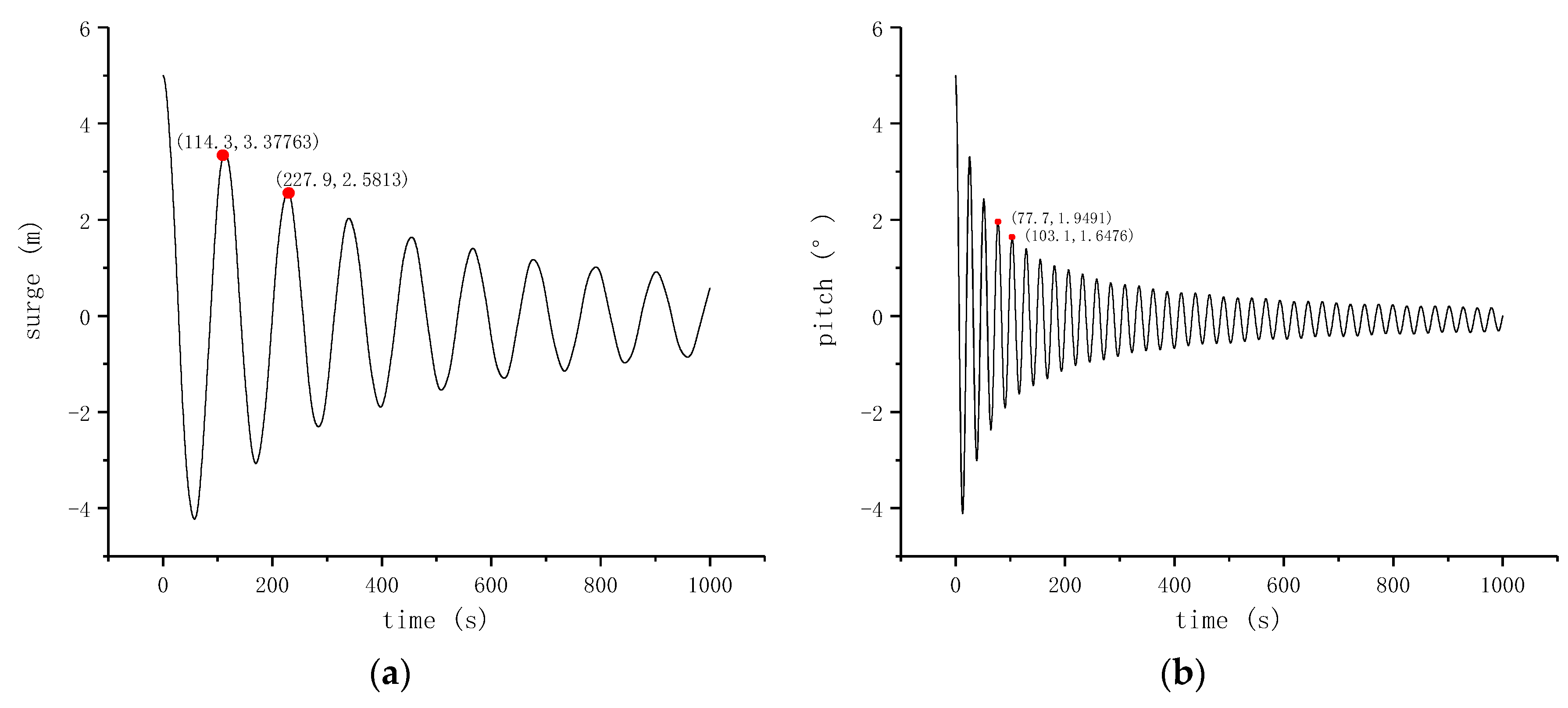
The natural frequency of the platform system can be obtained via the free decay test, as shown in
Figure 17. The system response caused by the initial unit displacement has the following expression:
The natural period of the system can be defined as follows:
where
denotes the damping period, obtained through the points on the decay test curve.
is the system damping (mainly fluid viscous damping as the radiation damping at the damping frequency is very small and can be ignored) and can be calculated by the Equation (15), where
is the amplitude logarithmic decay rate, namely the natural logarithm of the ratio of two adjacent response amplitudes.
In addition, the system damping should also contain the aerodynamic damping. The linearization analysis was completed in OpenFAST v2.4.0 to obtain the aerodynamic damping values at the rated operating point [
39].
Table 7 shows a summary of the system damping parameters at the rated wind speed operating point.
In the steady-state response of the system under the uniform wind and regular waves, the wind loads usually determine the equilibrium displacement, and the wave loads usually determine the oscillation amplitude of the system near the equilibrium point [
29,
40]. Taking a regular wave with a frequency of 0.1 Hz and a height of 2 m under the rated wind speed as an example, the phase analysis results are shown in
Table 8. It can be concluded from the table that the motion phase calculated according to Equation (12) is roughly consistent with the phase obtained by the FAST simulation results [
39]. There is a certain discrepancy (about 6°), mainly due to model assumptions and inaccurate calculations of damping. Fortunately, the phase differences calculated by the two methods are almost equal with the discrepancy of 0.7°; therefore, the above method of calculating the phase difference is believable. For convenience, taking the surge motion as a reference, the phase difference of the pitch motion relative to the surge motion can be expressed as
. Then the absolute speed of the hub center is changed to:
According to the above analysis, each frequency uniquely determines the phase difference at a given wind speed; therefore, this paper selects two frequencies of 0.1 and 0.2 Hz as research. The specific simulation cases are shown in
Table 9.
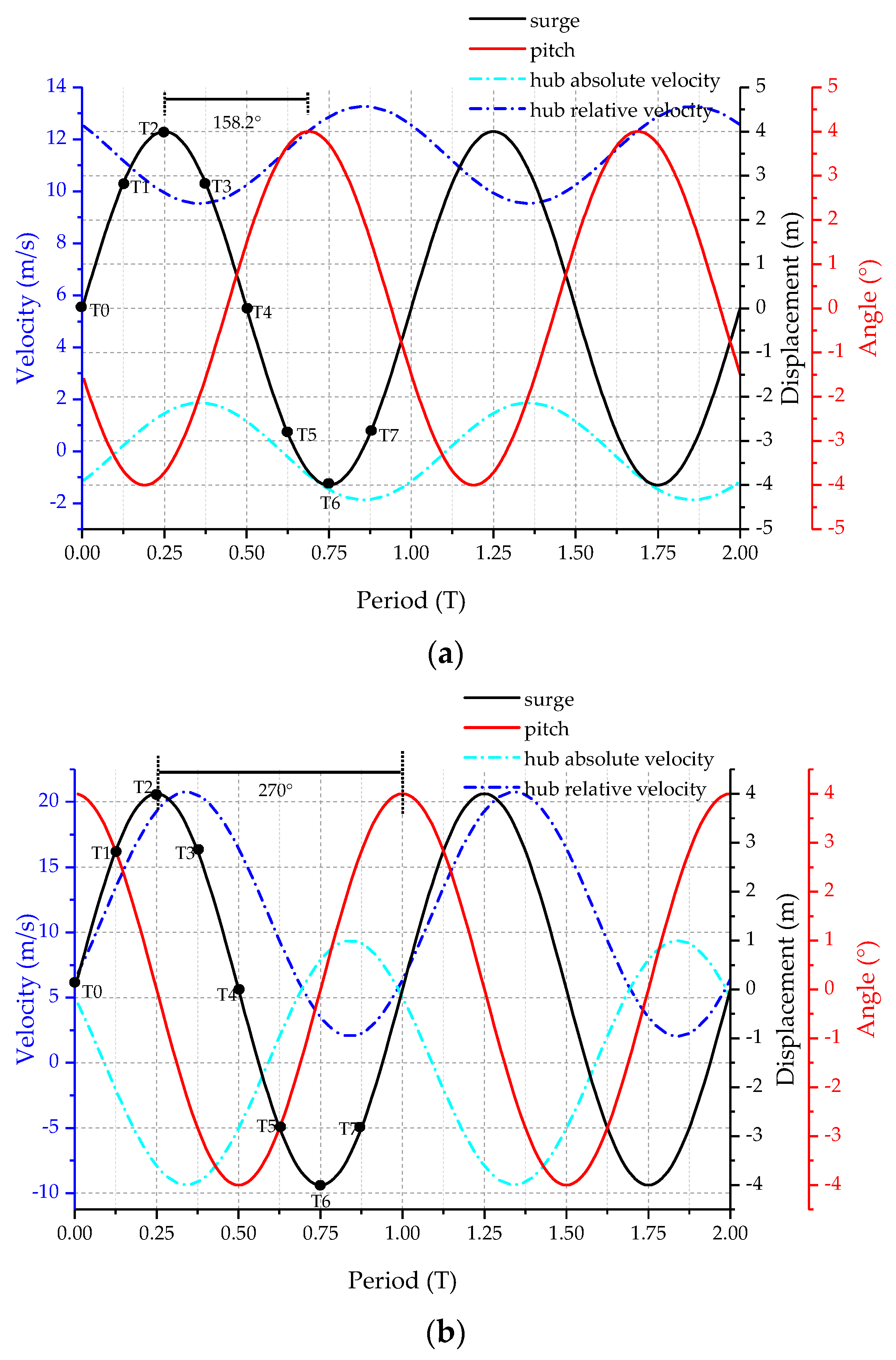
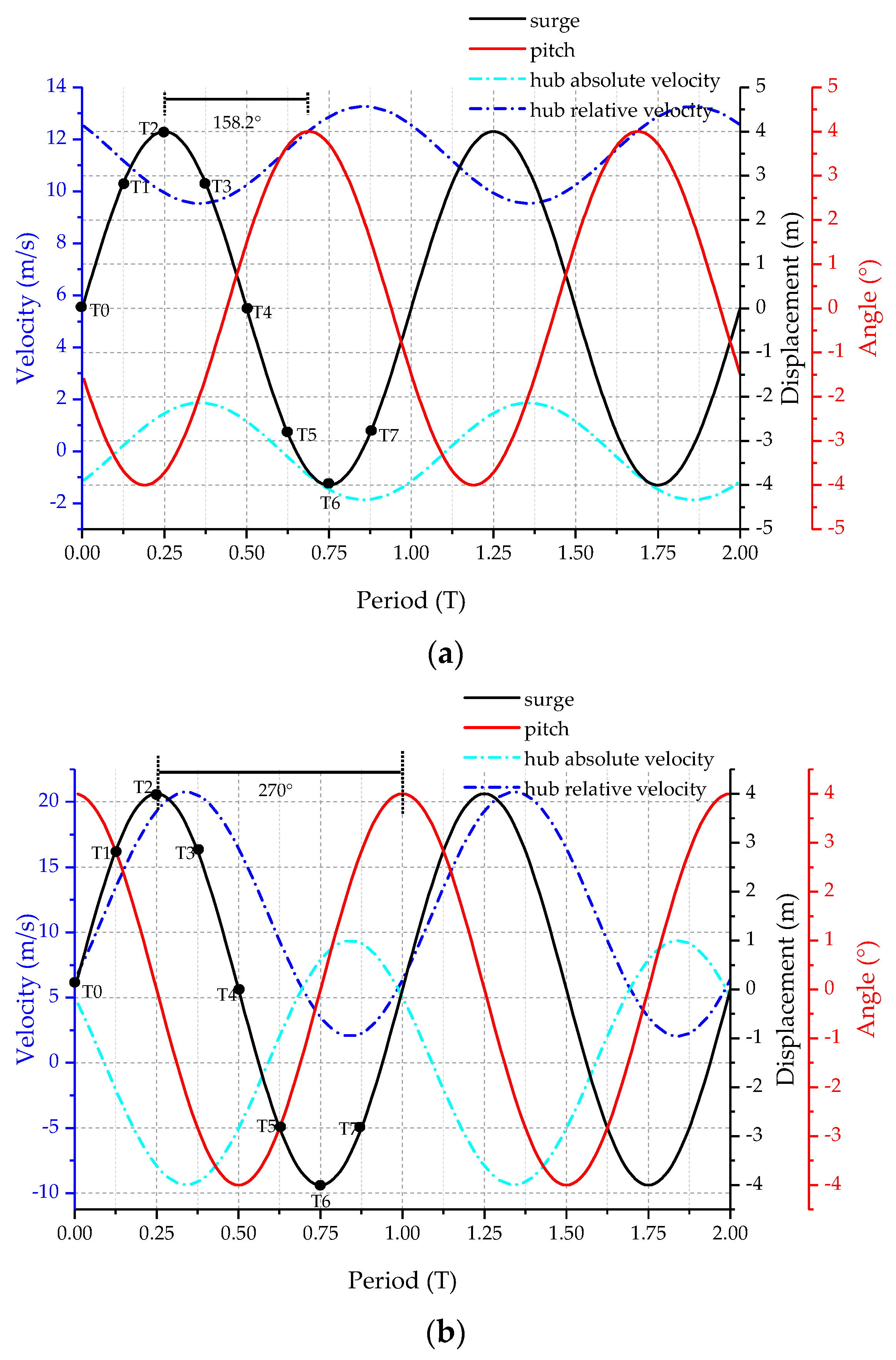
Figure 18a,b show the motions of the wind turbine under case 20 and case 22, respectively. Under case 20, the moment of maximum absolute speed of the hub center moves to T3. Under case 22, the moment of maximum absolute speed moment moves to T7.
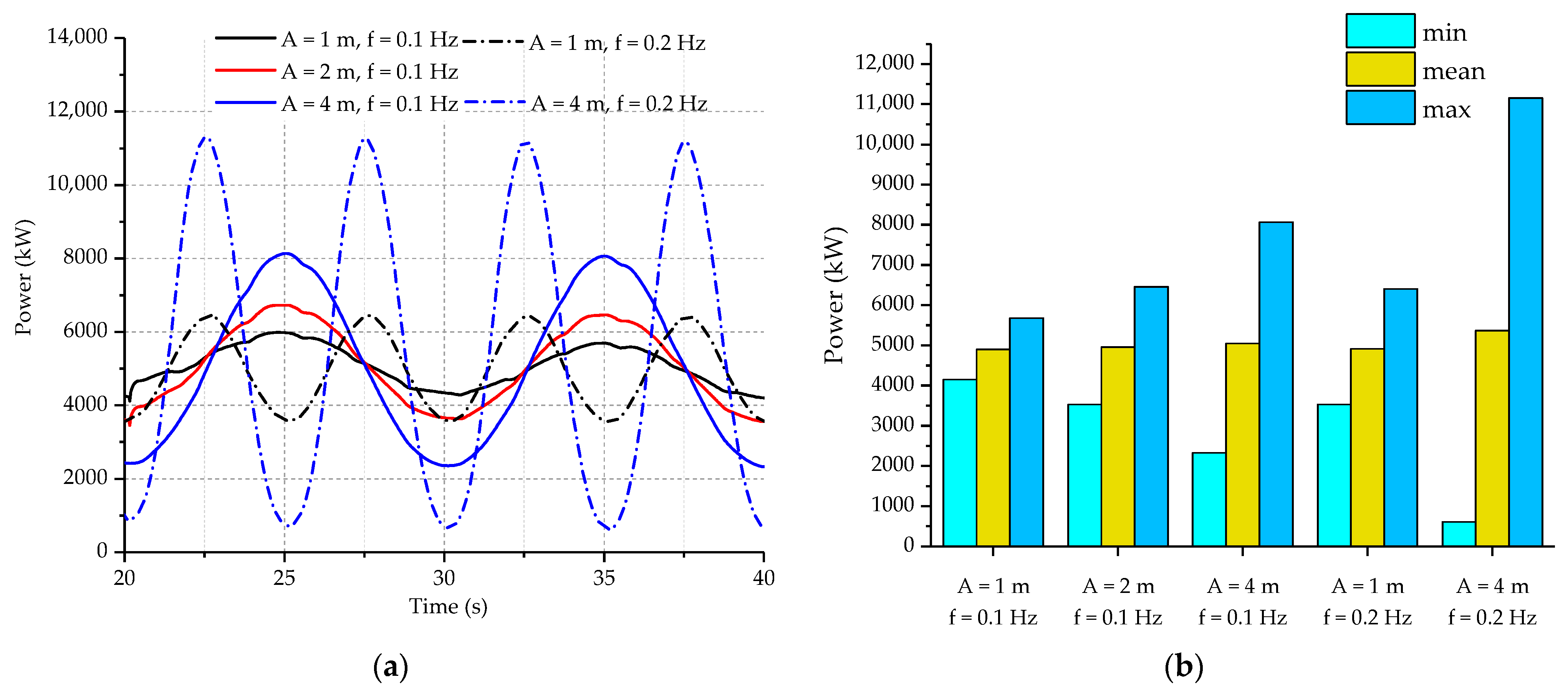
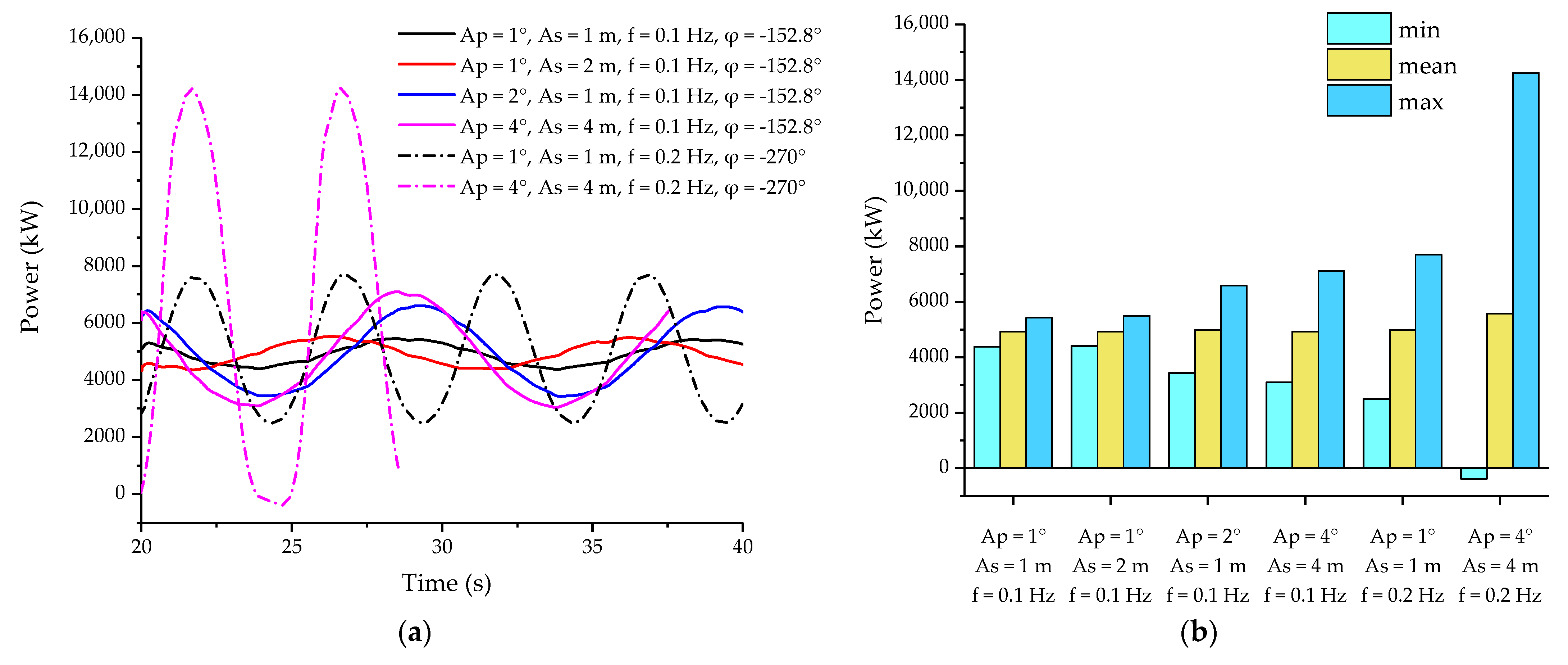
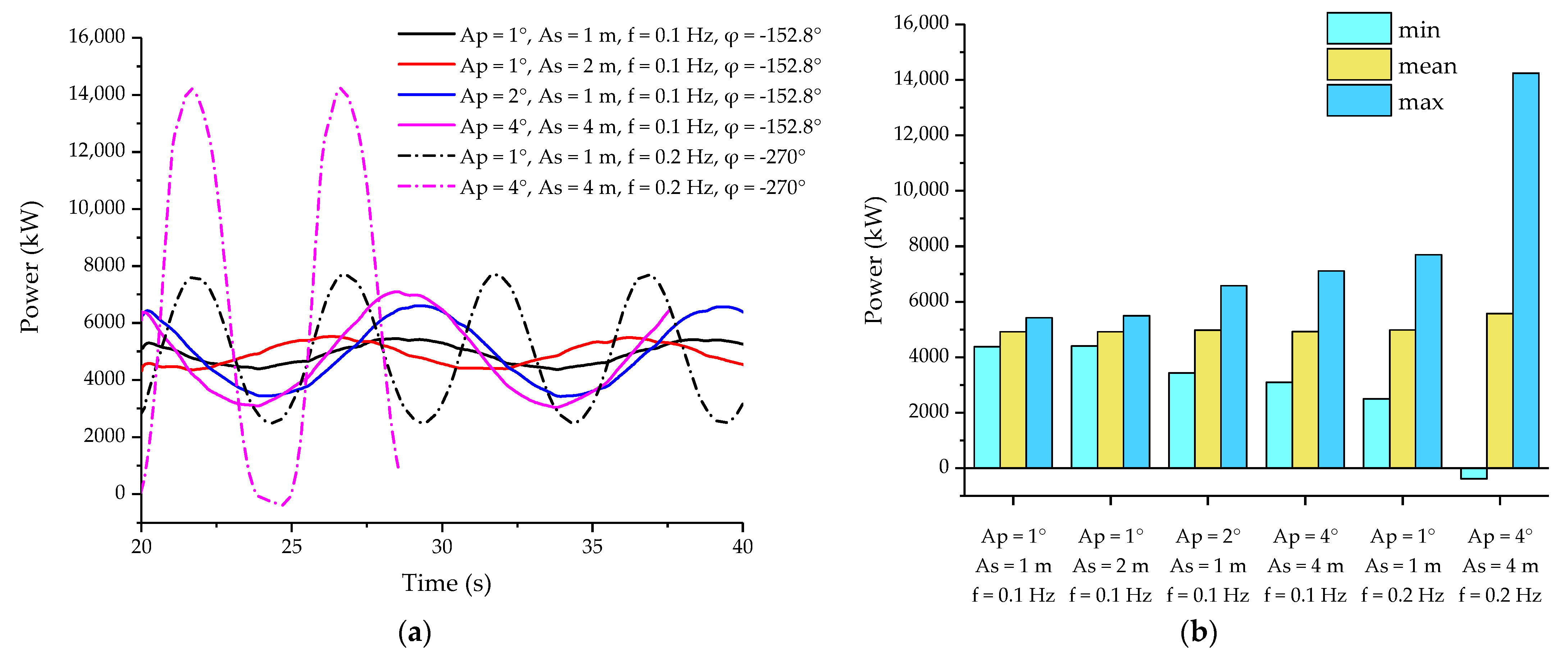
Under the combined motion with a phase difference, the power variation curves are depicted in
Figure 19, and the power statistics are presented in
Table 9. First, the power oscillation under the combined motion with a phase difference is smaller than that under the same-phase combined motion. The maximum power of case 17 is reduced by 1.42 MW compared to case 11, and the maximum power of case 21 is reduced by 1.23 MW compared to case 15. It is concluded that the impact on the attenuation of power at 0.1 Hz is greater than that at 0.2 Hz. Furthermore, under different frequencies, the combined motion with phase difference has different power influence characteristics compared to the single motion. At 0.1 Hz, the maximum power of case 17 is smaller than that of the pitch motion of case 1 and the surge motion of case 6; however, at 0.2 Hz, the maximum power of case 20 is larger than that of the pitch motion of case 4 and the surge motion of case 9. This illustrates the mutual weakening effects on power characteristics between pitch and surge motion at 0.1 HZ and the mutual strengthening effects at 0.2 HZ. In addition, under combinations of different motion amplitudes, the characteristic position of the power variation curve is different. At 0.1 Hz, the maximum power occurs near the T7 moment in case 17, near the T5 moment in case 18, and near the T7~T0 moment in case 19. This is mainly because the power is affected by pitch and surge motion amplitude differently.
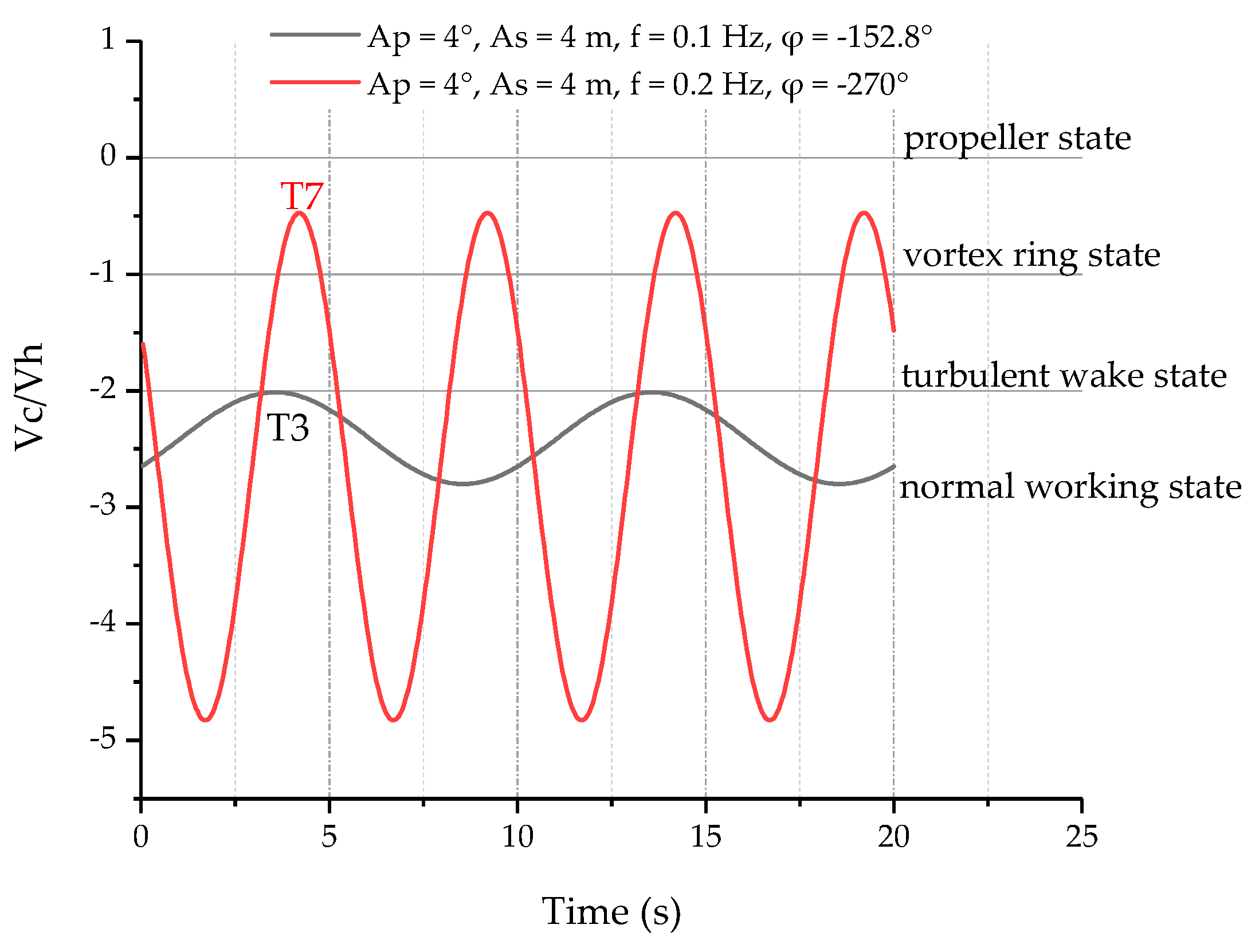
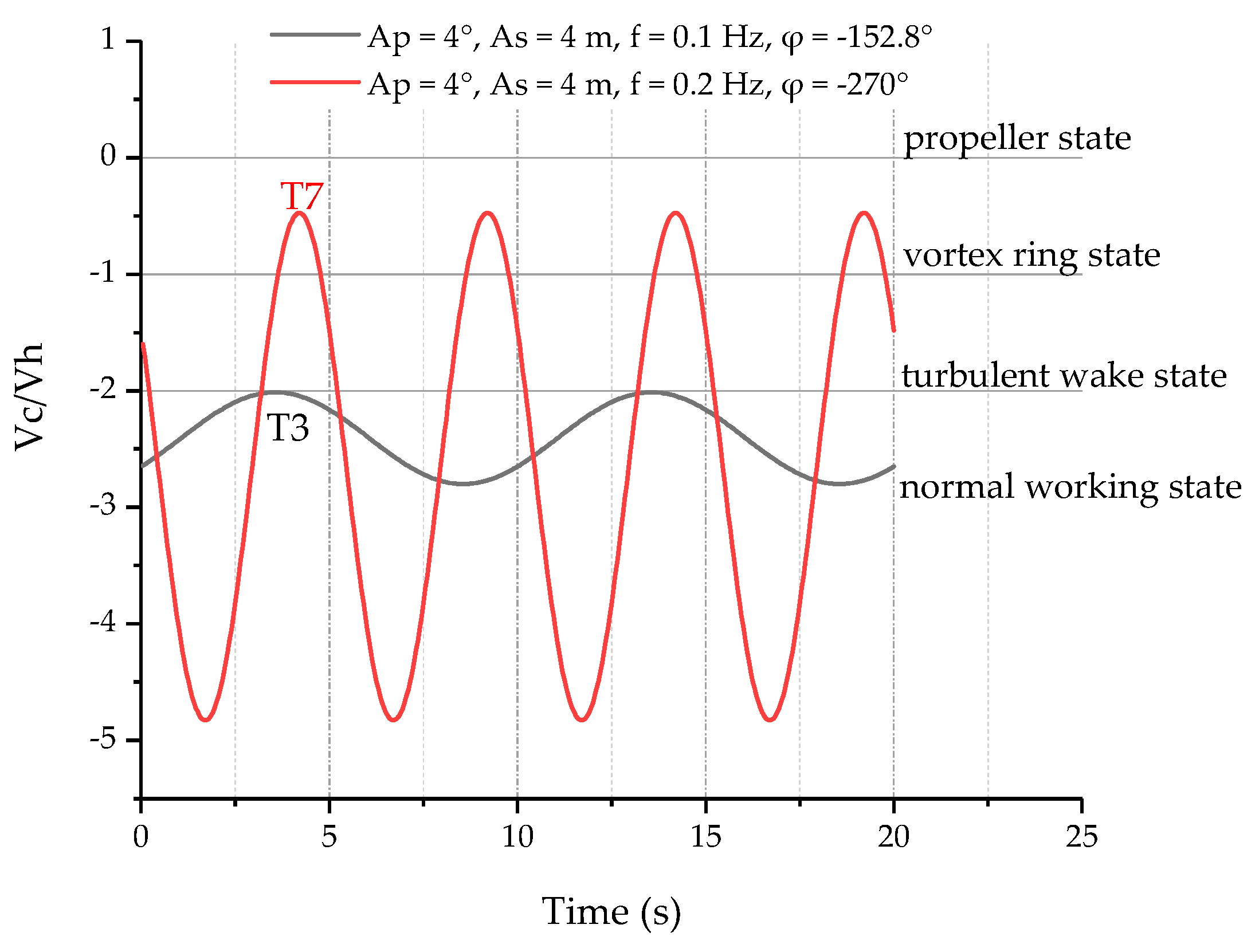
The speed ratio
of case 20 and case 22 are shown in
Figure 20. The wind turbine under case 20 is only in the normal working state, whereas it experiences three states except the propeller state under case 22; however, case 22 shows a negative power phenomenon in
Figure 19 as the hub speed used in the formula
cannot represent the speed distribution of the whole rotor plane.
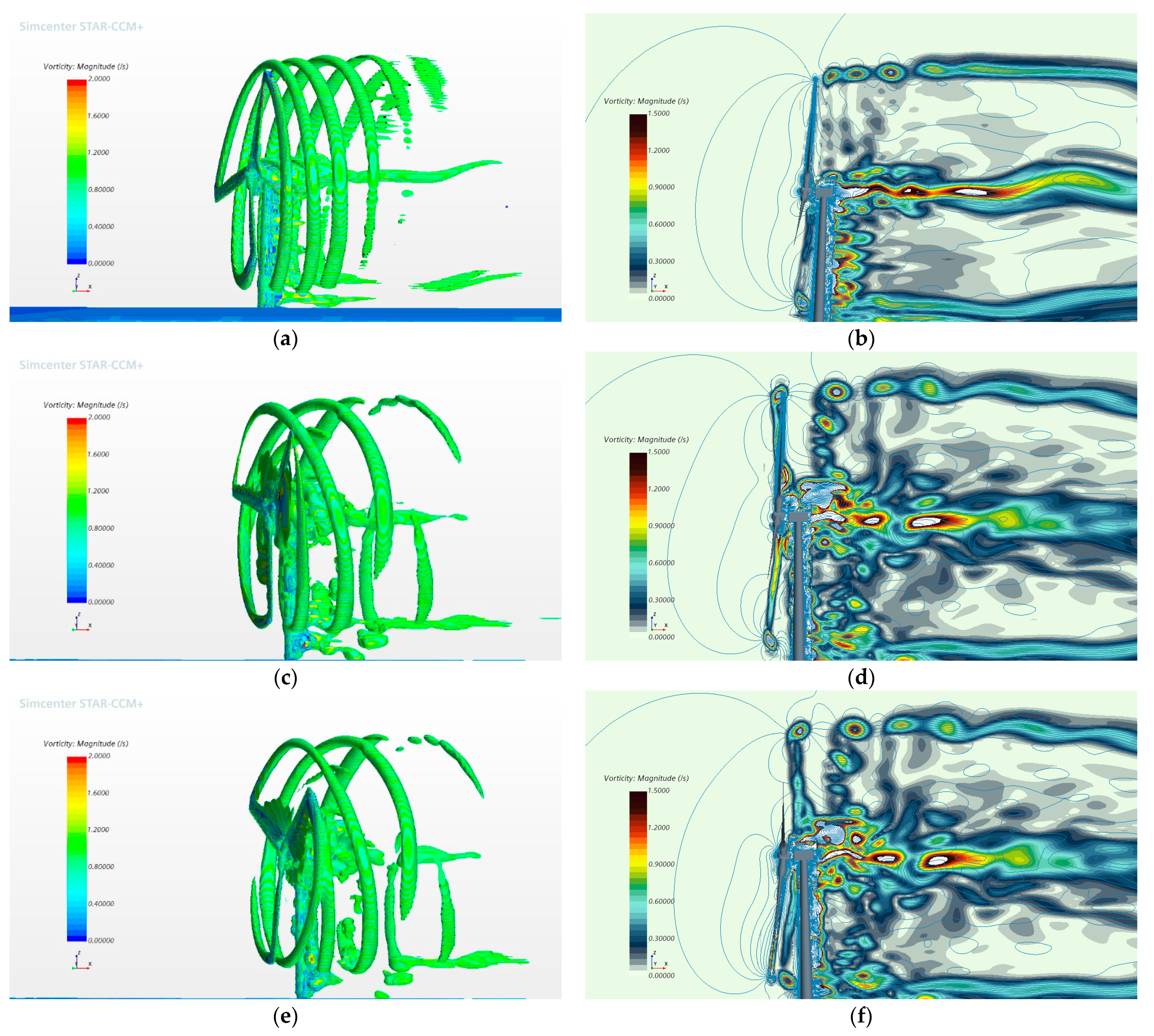
Figure 21a,b display the iso-surface of the vortex at T3 moment under case 20. The gap between wake vortices shedding from the blade tip maintains a certain distance, which is different from case 14. It is visible that the blade does not directly interfere with the wake vortex.
Figure 21c–f display the iso-surface of the vortex under case 22. The vortex emitted by the previous blade has been stroke by the next blade before it flows downstream away from the tip near the T7 moment. The wind turbine has completely entered the vortex ring state, but the intensity of blade/vortex interference is reduced, and the integrity of the vortex structure is better than in case 16. The blade breaks away from its own wake vortices for a while; then, new wake vortices are generated based on the previous one, so what we see is that no new vortex structure is produced during this time.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}