
Full Duplex Physical and MAC Layer-Based Underwater Wireless Communication Systems and Protocols: Opportunities, Challenges, and Future Directions

 ,
, 
Abstract
1. Introduction
Motivations and Contributions
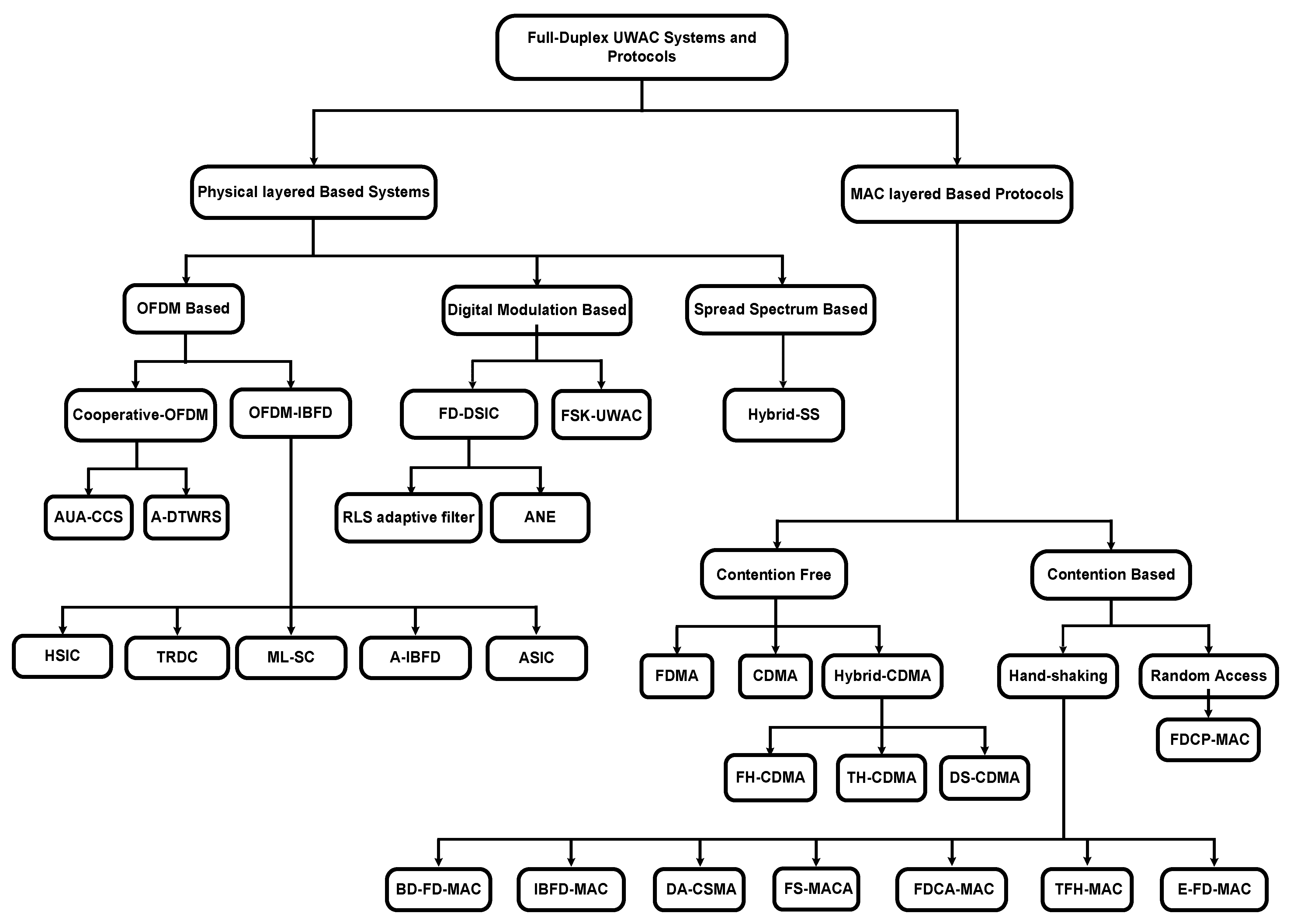
- We reviewed various FD systems and protocols for underwater communication and classified them based on the Physical and MAC layers. The impact of various features on the FD systems and protocols discussed is thoroughly explained. This survey looks at various methodologies for improving the quality and efficiency of these reliable FD systems and protocols, with the aim of further expanding the implementation of these systems and protocols in the future.
- We contributed by comparing different FD-physical layer-based UWAC Systems in terms of different metrics including spectral efficiency, BER, transmission range, and data rate, as well as implementing these protocols in different environments. The advantages and disadvantages of these protocols are also discussed.
- We contributed by comparing various FD MAC protocols based on throughput, delay efficiency, energy efficiency, transmission rate, and data rate. These protocols’ advantages and disadvantages are discussed in detail.
- We contributed by laying out a number of significant challenges that affect the performance of FD-UWAC systems and MAC layered protocols, all of which must be carefully addressed as these systems are built.
- To the best of our knowledge, some new open issues and potential research directions are listed, which will aid in the advancement of the aforementioned FD systems and MAC protocols.
2. Physical Layer-Based Full-Duplex Underwater Acoustic Communication Systems
2.1. Challenges Faced by FD Physical Layered UWAC Systems
2.2. OFDM Based UWAC Systems
- The OFDM signal’s entire bandwidth should cover all the data transmission frequencies, which is dependent on the bandwidth of the mounted transducers [55].
- The inverse fast Fourier transform (IFFT) algorithm is used to make the sub-carriers orthogonal for successful transmission using the UW communication transceiver [16].
- As shown below, the channel coherence time is denoted by denoted by . is the upper limit of the OFDM symbol length, is the rms access delay and is the maximum access delay:
- A cyclic prefix is applied to the OFDM symbol to reduce the SNR in the OFDM channel. The symbol length is five to six times longer than the cyclic prefix (CP) period, resulting in a throughput loss of less than one decibel.
2.2.1. Cooperative-OFDM Systems
- AUA-CCS. A pairwise error probability (PRP) method is used in AUA-CCS to achieve maximum spatial diversity and time-invariant channels. The described protocol has been found robust to ISI, reduces asynchronous time issues, and boosts the spectral efficiency performance of time-varying channels [23]. However, despite having a fixed power amplifier factor, this protocol is not energy efficient [40,56].
- A-DTWR. The A-DTWR FD-OFDM based system is proposed in [19] to combat the issues of low spectral efficiency and wide delays in time-varying frequency-selective channels in OFDM based FD-UWAC cooperative communication systems. Two users can exchange data using two relays in this system, and simultaneous transmission is carried out in FD fashion between the users. However, through each relay, the propagation delay and time errors (two forms of time errors) can be observed at the receiver [19,57]. The first error occurs when the user’s signals are misaligned on a single relay during the MAC phase, and the second error occurs when the system’s two relays send the same copy to the destination at different times to a single user. To address these issues, a new full-duplex analog network coding (FD-ANC) system is being developed at the receiver section, which employs proper signaling and the Viterbi algorithm on each sub-carrier block. For the extraction of delay diversity from the two identical copies sent from the source to the destination, the Viterbi algorithm is used.
2.2.2. OFDM-Based IBFD Systems
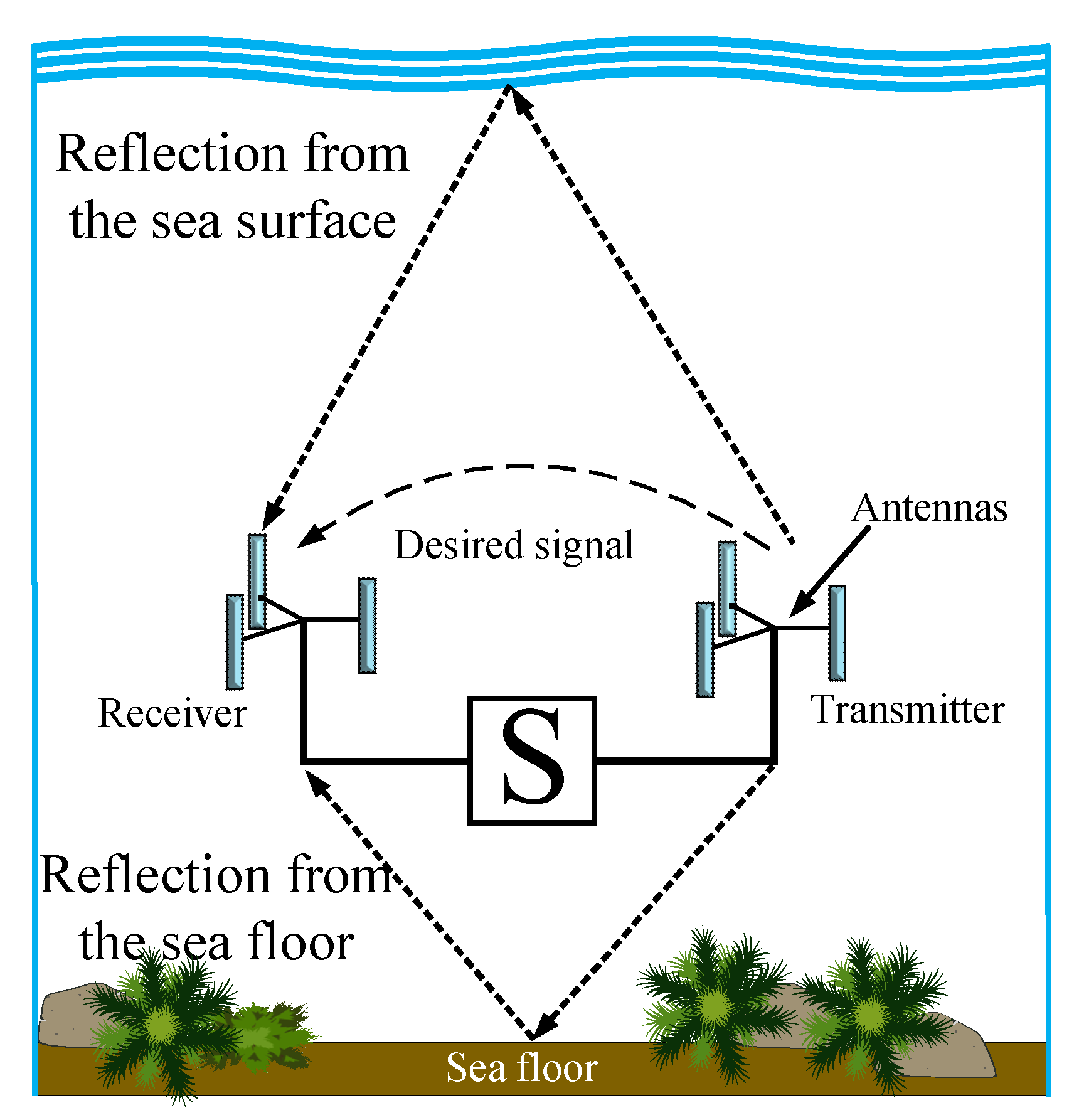
- HSIC. By introducing a hybrid analog and digital cancellation mechanism to predict dynamic range saturation, a novel HSIC scheme has been created to eliminate self-loop and multiple-reflection interferences [20]. The analog SI cancellation is applied before the low-noise-amplifier (LNA) [41]. In addition to the analog to digital converter, the digital SI is used to estimate residual SI (ADC). The proposed scheme uses an IBFD communication framework on FD modems, which dramatically reduces SLI and multiple reflection interference (i.e., interference produced due to reflection from the sea surface and seafloor).
- TRDC. Using time-reversal and soft-decision feedback turbo equalization, a novel TRDC automatic cancellation scheme for the elimination of ISI and RSI is proposed (SDFE) [22]. When compared to the previously used scheme, this proposed scheme had a substantial gain of 2.5 dB and demonstrated significant performance by achieving high spectral efficiency.
- ML-SC-IBFD. A novel ML-SC-IBFD estimator-based SI channel estimation algorithm is proposed, that takes advantage of sparse constraints and OFDM modulation techniques while using both digital and analog cancellation schemes to suppress the SLI [23]. Experimental results showed that this proposed scheme for IBFD-UWAC demonstrated better BER performance, highly accurate SI estimation, and cancelation performance, as compared to the previous methods. Further, it executed a faster convergence rate than Non-parametric-Maximum-likelihood (NPML), and the lowest level of mean square error (MSE), than that of conventional methods. In contrast to previous methods, experimental results showed that this proposed scheme for IBFD-UWAC demonstrated better BER performance, highly accurate SI estimation, and cancelation performance. It also had a higher convergence rate than Non-parametric-Maximum-likelihood (NPML) and the lowest mean square error (MSE) than traditional methods.
- A-IBFD. A new A-IBFD framework has been introduced in [24] to remove two major issues in IBFD-UWAC systems: asynchronous contact and non-linear distortion induced by the power amplifier (PA). In the proposed scheme, the researchers devised two cancellation schemes: analog and digital cancellation [59]. However, the authors primarily concentrated on digital cancellation because analog cancellation has an indirect effect on the output of the digital canceler technique’s signal-to-interference-ratio (SIR). We discovered that by synchronizing the intended signal with the addition of a spread spectrum non-overlapping area, an over-parameterization algorithm is used to estimate the non-linear SI channel. The proposed scheme outperformed previous SI cancellation schemes in terms of BER, with the added benefit of faster sparse constraints than the Over-Parameterization based Recursive Least Squares (OPRLS). We discovered that this exclusive research could be expanded in the future to increase the UWAC protocols throughput and spectral performance.
- A-SIC. A novel A-SIC mechanism is proposed that uses the normalized least mean square (NLMS) and adaptive self-interference cancellation (ASIC) schemes to prevent SI cancellation [44]. The received signal from the distant node is remodeled using the detected signal, and then the remodeled signal is subtracted from the received signal after the ASIC to obtain the RSI signal, which is then processed using the NLMS algorithm. This entire process is used to increase the ASIC algorithm’s ability to suppress SI to an estimated level of ambient noise. Furthermore, un-coded QPSK with OFDM modulation is used to send and receive data between the two IBFD nodes. The experimental and simulation results show that this advanced cancellation scheme effectively reduces SI to ambient noise levels [44].
2.3. Digital Modulation Based Systems
2.3.1. FD-DSIC Systems
- RLS-Adaptive-filter. A less-complex recursive least-square (RLS) adaptive filter with dichotomous co-ordinate descent (DSD) is proposed [25,26,27], which is based on a digital SI cancellation scheme. In this proposed scheme the PA output is used to recreate the non-linear PA-SI signal, which improves the efficiency of the advanced SI cancellation scheme. Addition of Fast convergence, high numerical stability, and low computational complexity are all advantages of the recursive least-square dichotomous coordinate decent phenomenon. With the PA adaptive filter, the RLS-DSD effectively suppresses SI at 69 dB. Additionally, this proposed scheme cancels the near-field interference signal. These systems also have issues with far-field interference cancellation and transmission rage.
- ANE. A novel ANE-based digital cancellation scheme is proposed in [60], in which the PA’s output signal serves as a guide for digital cancellation to resolve non-linear distortion in the transmitter and receiver chains. The equalization has been performed by using the basis expansion model (BEM), which can model the inverse of the pre-amplifier response. To achieve a better equalization performance, the proposed scheme uses two cost functions, the mean squared error (MSE) and the other one is derived from the power spectrum of the received signal. These systems have been tested on two water tanks. In the first water tank, artificial non-linear restoration along with the Rapp model has been installed to receive the signal from the hydrophone, but without using the pre-amplifier, and in the second tank hydrophone receives the signal with a pre-amplifier by utilizing the non-linear equalization technique. The second tank shows a better SI cancellation performance of 4 dB by applying the ANE technique.
2.3.2. FSK-UWAC
2.4. Spread Spectrum (SS) Based Systems
Hybrid-SS
2.5. Comparison of Different FD-Physical Layer-Based UWAC Systems
2.5.1. Spectral Efficiency
2.5.2. Bit Error Rate
2.5.3. Transmission Range
2.5.4. Signal-to-Noise Ratio
2.5.5. Data Rate
2.6. Implementation of Physical Layer FD-UWAC Systems Using FD Modems
3. Medium Access Control (MAC) Layered UWAC Protocols
3.1. Challenges Facing by FD-UWAC MAC Protocols
3.2. Contention-Free
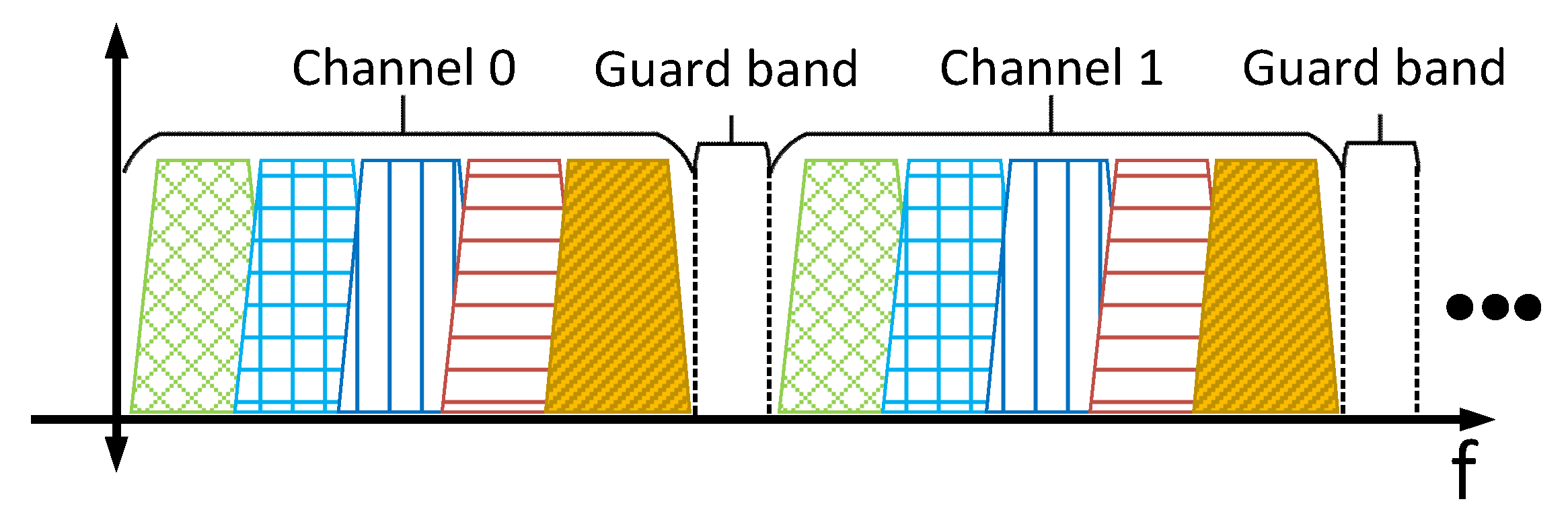
- FDMA. The FDMA based FD-MAC protocol provides an easy and straightforward means of channelization for usable bandwidth, but it is unable to manage the large number of UW nodes, resulting in poor bandwidth utilization and frequency selective fading issues, resulting in significant data loss [46].
- CDMA. A CDMA-based FD-MAC protocol has been tested, and it has two major advantages: bandwidth efficiency and the ability to effectively reduce frequency selective fading by using a full-duplex channel. However, it is also unable to protect the network from accidental collisions, which reduce data rate [46].
- Hybrid-CDMA. The hybrid CDMA based FD-MAC protocols, such as frequency hopping (FH-CDMA), direct sequence (DS-CDMA), and time hopping (TH-CDMA) have been proposed to address the issues raised by the FD-FDMA based protocols. It was discovered that the majority of these protocols used four HD Desert starRBS-1 modems for data transmission and reception to ensure FD communication. The FD-TH-CDMA MAC protocol can prevent collisions, while the FH-CDMA MAC protocol reduces frequency selective fading. We also discovered that certain hybrid MAC protocols provide hopping and substantial bandwidth benefits. Furthermore, the hybrid DS-CDMA and FDMA MAC protocol provides a medium for isolating two concurrently transmitting channels while maintaining FD communication. The FD-DS-CDMA, on the other hand, has some minor hardware problems. According to our findings, all of the above-mentioned protocols perform admirably; however, the FD-FH-CDMA outperforms the other FD-CDMA MAC protocols, particularly in the lack and bucket environments, with a near 90 percent success rate after three to four successful transmissions. Furthermore, it successfully mitigated multipath fading as well as frequency selective fading, resulting in high efficiency and low complexity [46].
3.3. Contention-Based
3.3.1. Hand-Shaking (HS)
- BD-FD-MAC. A BD-FD-MAC protocol successfully eliminate the issue of long propagation delays which take a long time to complete a successful transmission which effect the throughput efficiency of FD-MAC protocols [36]. Hence, the proposed BD-FD-MAC UWAC protocol increase the throughput significantly and reduced long propagation delays by shortening the time required for efficient data transmission. This protocol employs a back-off timer that works on the concept of prioritizing when and where to transmit. The sensor node (transmitter) is given the opportunity to transmit when the back-off timer expires. In order to prevent unwanted collisions with neighboring nodes, the sender often sends an identification message to the receiver node. The efficient data transmission begins after receiving the CTS from the destination node. The period of successful data delivery becomes miniature, which is helpful for throughputs improvement and for long propagation delay issue [36]. Physical and MAC header bits are 128 bits and 272 bits respectively, with a propagation delay of up to 3.3 s, while this FD-protocol has a transmission speed of up to 710 bps. Although the BD-FD-MAC UWAC protocol yields significant results, it is implemented in a simulation environment, so it is necessary to implement this protocol in a practical environment, while energy efficiency is also needed to confirm the protocol’s validity.
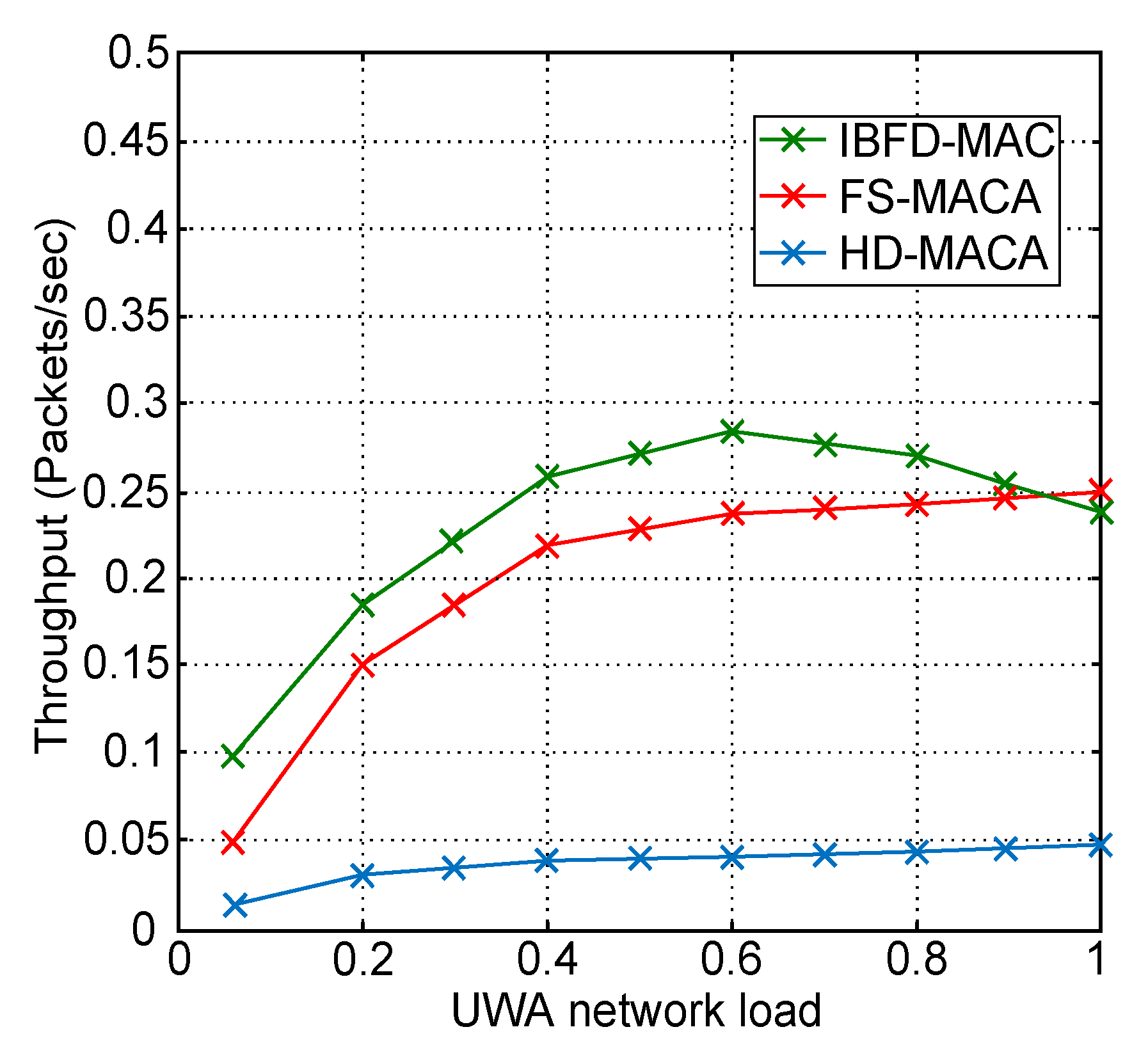
- IBFD-MAC. To fix issues such as power consumption, unexpected node collisions, long propagation delays, and low data rates, a novel IBFD-MAC protocol is proposed [35]. The link capacity is nearly doubled as a result of the IBFD approach implementation, and substantial data rates are achieved by reducing large end-to-end delays. Furthermore, by avoiding unwanted node collisions and reducing the long propagation delay, power consumption is decreased. In addition, as shown in Table 3, the following essential parameters are used in the implementation and testing of this proposed protocol in various water depths.
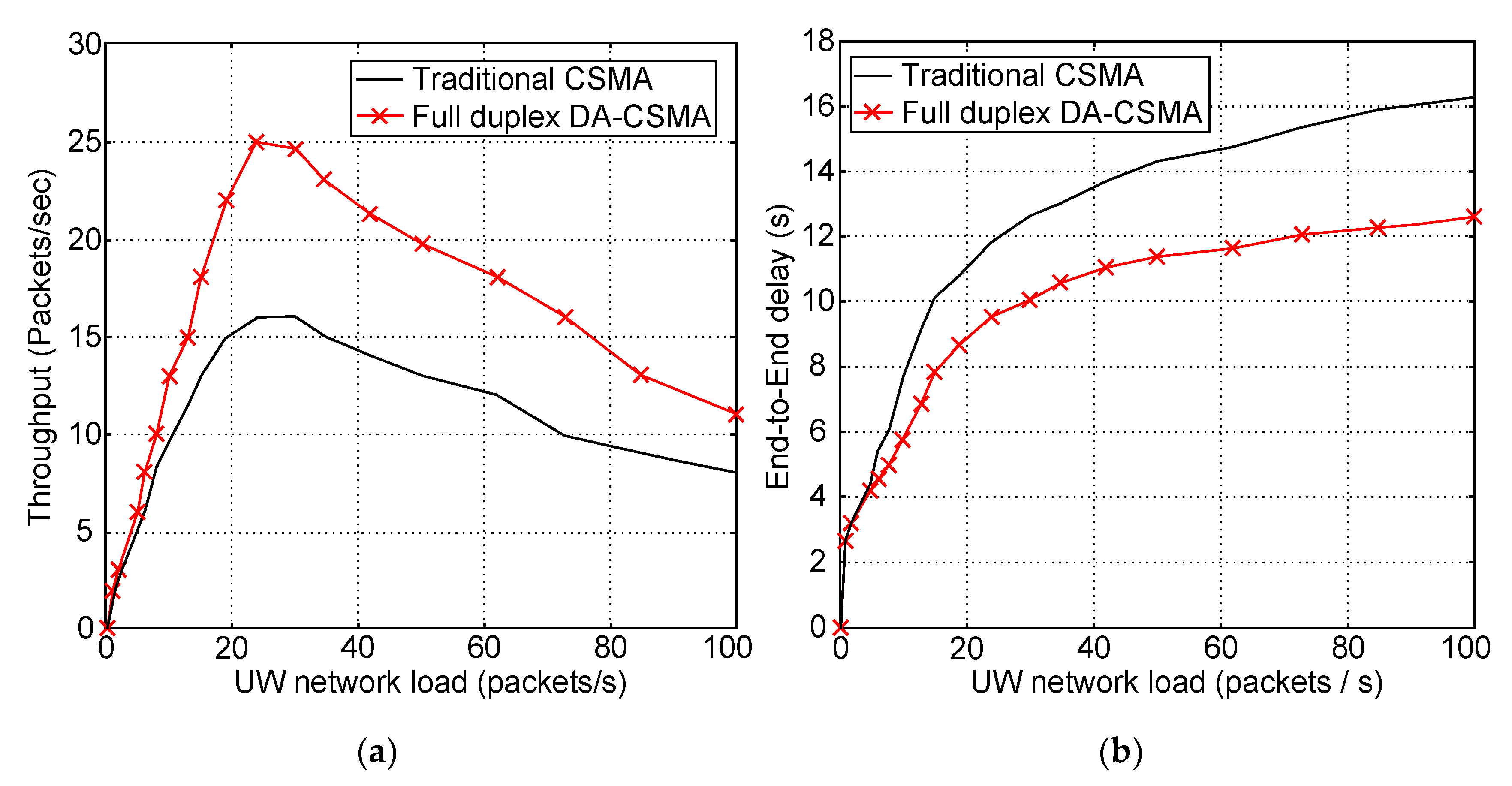
- DA-CSMA. The DA-CSMA based protocol [30] is widely used in the development of the existing HS-FD-MAC layer protocols, for reducing the multipath effect, which results in the reduction of frequency selective fading [10,30]. The implemented DA-CSMA properties dramatically improved efficiency, by resolving the hidden and exposed terminal issue, as well as improving data collision elimination. This protocol is tested by implementing the FD-modem and splitting the channel into two portions for simultaneous transmission of control and data packets, reducing collisions [30], and achieving high throughput while consuming little energy. It will be important in the future to verify its robustness using a wide network, while it is implemented for 10 nodes randomly distributed in a square km underwater environment. Table 4 displays the key parameters used in the implementation of this protocol.The DA-CSMA UWAC protocol is compared to the traditional HD-CSMA-UWAC protocol, as shown in Figure 4. The DA-CSMA protocol outperforms conventional HD-CSMA by providing higher throughputs, lower energy consumption, exhibiting low end-to-end delays under heavy network load.
- FS-MACA. The FD FS-MACA protocol [37], based on the future scheduling (FS) handshaking (HS) mechanism scheme, is proposed as a new handshaking protocol [37]. The HS scheme ensures data transmission by scheduled procedures and future negotiations between the sender and receiving segment. The physical channel is divided into two parts, one for real data transmission and the other for control packet negotiation, resulting in higher throughput and less interference while achieving FD communication. This protocol was tested in a network of 100 unsystematically distributed nodes in an underwater environment with a 2 × 2 square km of surface area, and it achieved a data rate of 100 kbps with packet lengths ranging from 400 to 1000 bytes. Despite the fact that the mentioned protocol above is capable of managing high traffic loads while preventing collisions without the use of time synchronization or ACK, there are still open issues that need to be addressed. Since it does not use time synchronization, this protocol is unable to manage long propagation delays and experiences severe throughput degradation; however, this may be an important topic for future study.
- FDCA-MAC. The FDCA-MAC UWAC protocol [34] is based on the idea of transmitting and receiving on the same frequency at the same time, reducing hidden and exposed terminal problems and allowing FD-UWAC modems to achieve high throughput. Recent research shows that using FD underwater acoustic modems, the SI effect can be cancelled easily [11,29,33], i.e., the HS mechanism can be used to predict transmission scheduling by passively receiving local information about neighboring node propagation delays. The proposed protocol is based on this concept, and it achieves large throughputs [34]. Furthermore, FD modems are used to implement multiple HS with their neighbors and to increase throughputs while achieving temporal and spatial reuse. It will be necessary to test its success in both a lack and a sea environment in the future.
- TFH-MAC. A novel TFH-MAC protocol is proposed, which significantly reduces the SLI issue, which is a common problem with FD UWAC systems, while achieving FD communication [69]. The TFH-MAC protocol is implemented on a node that acts as a centralized node among multiple nodes. The centralized node connects the multiple nodes, using the TFH-MAC protocol to ensure that communication between the nodes is secure. The TFH-MAC protocol significantly reduces SLI, allowing for higher throughput while using less power. However, we discovered that this protocol is unable to cope with long propagation delays, resulting in reduced performance when used in a large network.
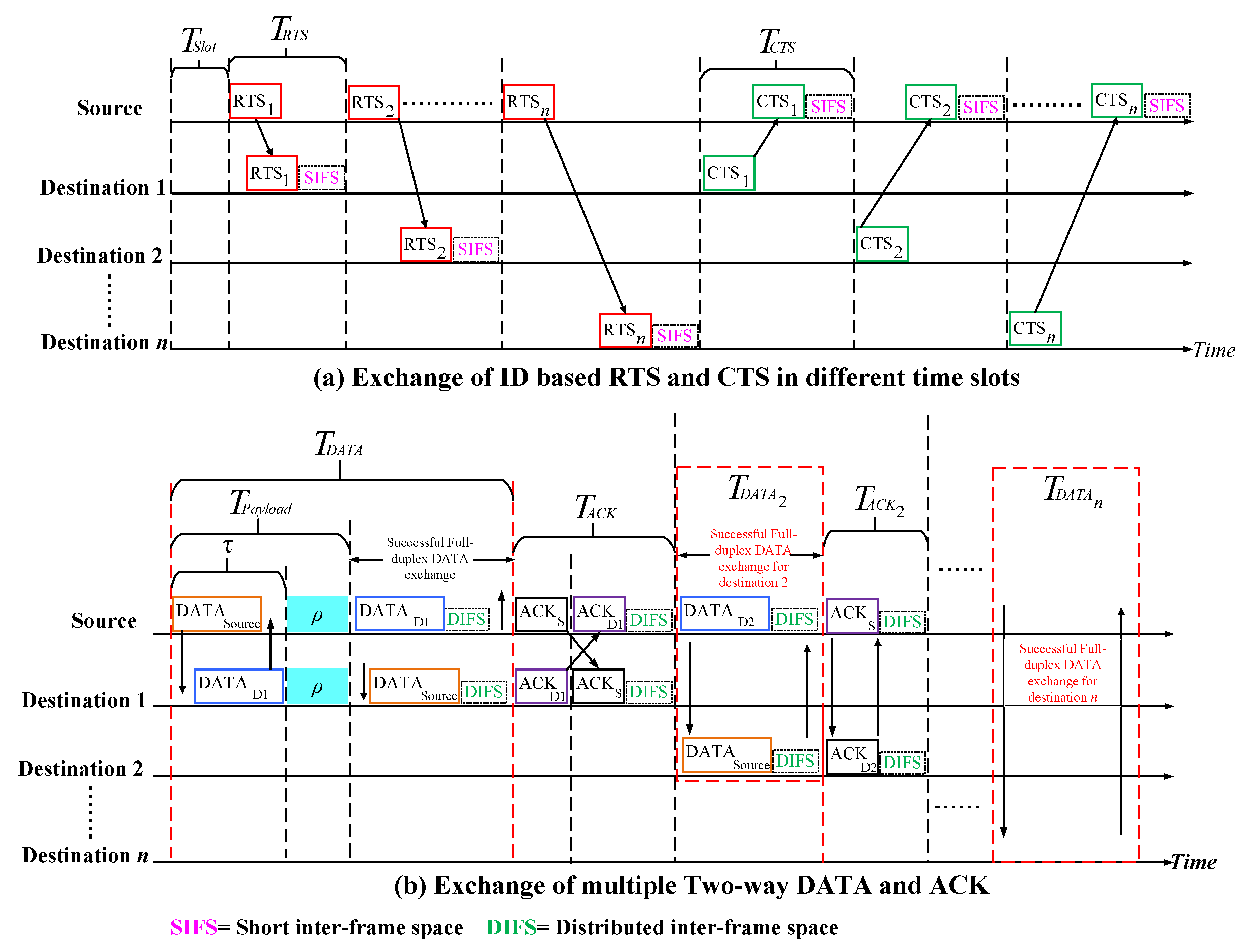
- E-FD-MAC. An enhanced E-FD-MAC protocol is proposed in [38], that allows the FD channel to simultaneously exchange data packets in a minimum possible time, as shown in Figure 6. This protocol allows the source and destination to exchange data using sensed information without being affected by unexpected collisions, which greatly increases throughput and reduces propagation delays. Due to its ability to transmit and receive control and data packets, the proposed E-FD-MAC receives active transmissions earlier than the current HD-MAC protocol. The way it works is shown in Figure 6. The UW sensor nodes detect the data and set a back-off timer based on the transmission priority. When the back-off timer on underwater sensor nodes expires, a transmission opportunity to the target destination node becomes open. In order to transmit information to the target destination node, the source node that acquires the transmission opportunity broadcasts an RTS to neighbor nodes that includes the target node’s ID. After receiving RTS, the destination node sends a clear-to-send (CTS) message to the source node, instructing it to conduct FD communication. After receiving the CTS, the source node and the destination node send the sensed data to each other in the order specified in the transmission order.
3.3.2. Random Access-Based
- FDCP-MAC. A self-organized FDCP-MAC protocol for multi-hop ad-hoc UWAN network has been presented in [39]. It has the ability to utilize the channel and avoid huge collision more efficiently at high network load with the help of fixed time HS and time stamped conflict resolution mechanism. This system randomly generate the data packets to random destination and all the sending nodes are completely aware of the all the static destination of the which are randomly distributed in the UW environment. This FDCP-MAC achieves enhanced throughput and lowest rate of collisions [39] as compared to the conventional HD-MAC protocols [7,71].
3.4. Comparative Analysis of MAC Layer-Based UWAC Full-Duplex Protocols
3.4.1. Throughput
3.4.2. Delay Efficiency
3.4.3. Energy Efficiency
3.4.4. Transmission Range
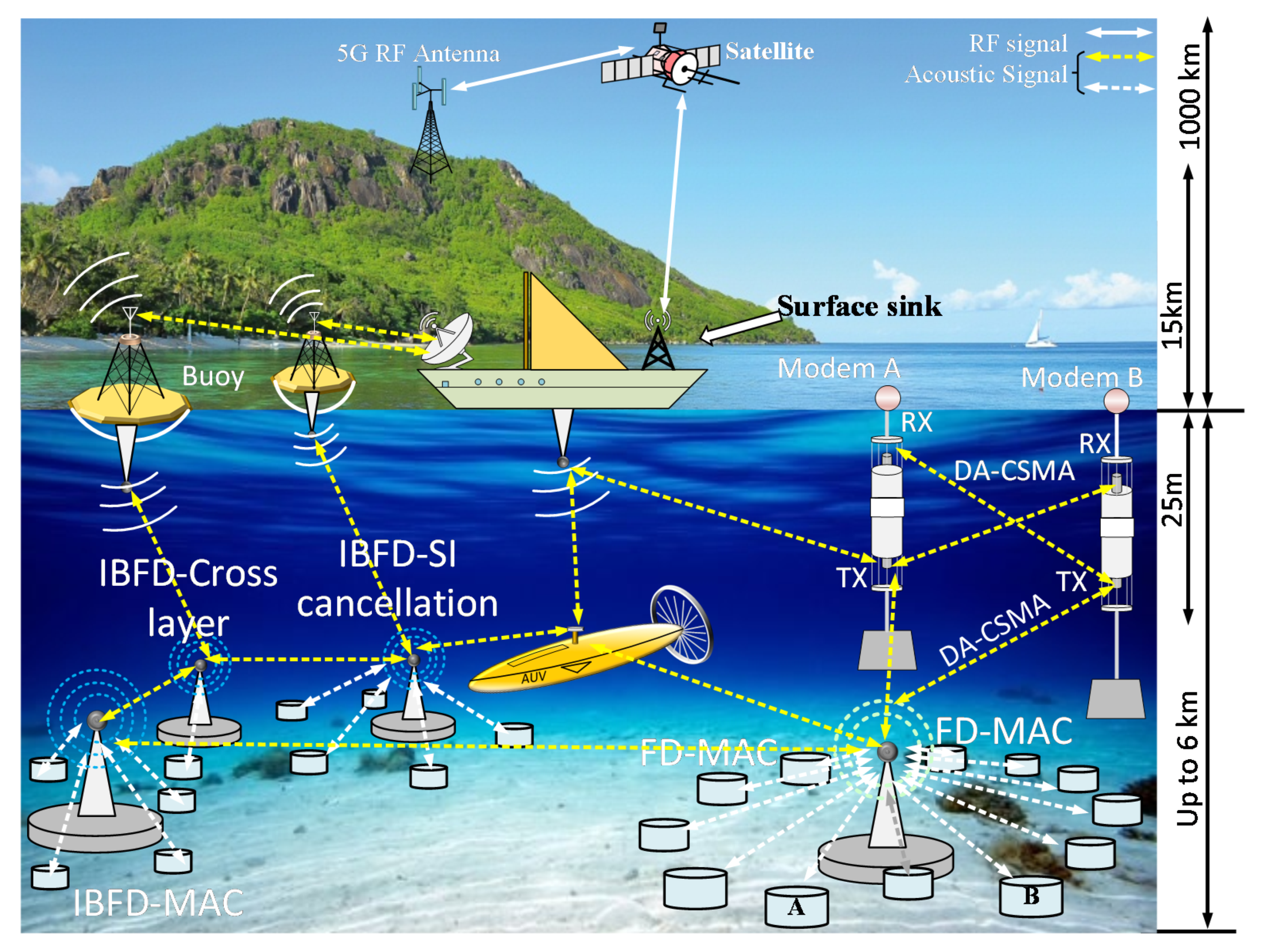
4. Suggested Cross-Layered Design Architecture Using Full-Duplex Physical and MAC-Layered UWAC Systems
5. Conclusions and Future Research Directions
5.1. Conclusions
5.2. Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| AUA-CCS | Asynchronous Underwater Acoustic Cooperative Communication Systems |
| A-DTWRS | Asynchronous Diamond Two-Way Relay System |
| A-IBFD | Asynchronous In-Band Full-duplex |
| ASIC | Adaptive Self-Interference Cancellation |
| ARQ | Automatic Repeat reQuest |
| AF-OFDM | Amplify and Forward Orthogonal Frequency Division Multiplexing |
| ACD | Analog to Digital Conversion |
| ASCII | American Standard Code for Information Interchange |
| ACK | Acknowledgment |
| ANE | Adaptive non-equalizer |
| BD-FD-MAC | Bi-Directional Full-Duplex Medium Access Control |
| BER | Bit Error Rate |
| CP | Cyclic Prefix |
| CSK | Code Shift Keying |
| CUAC | Cooperative Underwater Acoustics Communication |
| Cooperative-OFDM | Cooperative Orthogonal Frequency Division Multiplexing |
| CDMA | Code Division Multiple Access |
| CST | Clear-to-Send |
| DS-CDMA | Direct sequence Code Division Multiple Access |
| DS-CDMA | Direct sequence Code Division Multiple Access |
| DA-CSMA | Distance Aware Carrier Sense Multiple Access |
| DSSS | Direct Sequence Spread Spectrum |
| DSD | Dichotomous Coordinate Decent |
| E-FD-MAC | Enhanced Full-Duplex MAC |
| FD | Full-Duplex |
| FH | Frequency Hopping |
| FD-DSIC | Full-Duplex Digital Self-Interference Cancellation |
| FD-SS | Full-Duplex Spectrum Sensing |
| FSK-UWAC | Frequency Shift Keying Underwater Acoustic Communication |
| FSK | Frequency Shift Keying |
| FPGA | Field Programmable Gate Array |
| FDMA | Frequency Division Multiple Access |
| FH-CDMA | Frequency Hopping Code Division Multiple Access |
| FD-CDMA | Full-Duplex Code Division Multiplexing |
| FD-MAC | Full-Duplex Medium access Control |
| FS-MACA | Future Scheduling Multiple Access with Collision Avoidance |
| FDCA-MAC | Full-Duplex Collision avoidance Medium Access Control |
| FDCP-MAC | Full-Duplex Collision avoidance Protocol Medium Access Control |
| HS | Hand-Shaking |
| HD | Half-Duplex |
| HSIC | Hybrid Self-Interference Cancellation |
| IBFD | In-Band Full-Duplex |
| IBFD-MAC | In-Band Full-duplex Medium access control |
| IBFD-UWAC | In-Band Full-Duplex Underwater Acoustic communication |
| IFFT | Inverse Fast Fourier Transform |
| ICI | Inter Carrier Interference |
| ISI | Inter Symbol Interference |
| IUI | Inter User Interference |
| IoUWT | Internet of Underwater Things |
| LDP | Low Detect Probability |
| LNA | Low Noise Amplifier |
| LTI | Local Transmission Interference |
| LEI | Local Emission Interference |
| MAC | Medium Access Control |
| ML | Maximum Likelihood |
| ML-SC-IBFD | Maximum Likelihood Sparse Constraint In-Band Full-Duplex |
| MSE | Mean Square Error |
| MUAC | Multi-User Acoustic Communication |
| NPML | Non-Parametric-Maximum-likelihood |
| NLMS | Normalized Least Mean Square |
| NACK | Non-Acknowledgement |
| OFDM | Orthogonal Frequency Division Multiplexing |
| OFDM-IBFD | Orthogonal Frequency Division Multiplexing In-Band Full-duplex |
| OPRLS | Over-Parameterization based Recursive Least Squares |
| PRP | Pairwise Error Probability |
| PPM | Pulse position modulation |
| PAPR | Peak-to-Average-Power Ratio |
| PVDF | Poly Vinylidene Fluoride |
| QoS | Quality of Services |
| RA | Random Access |
| RSI | Residual Self-Interference |
| RLS | Recursive Least-Square |
| RST | Request-to-Send |
| SIR | Signal-to-Interference-Ratio |
| SI | Self-Interference |
| SIC | Self-Interference Cancellation |
| SS | Spread Spectrum |
| SS | Spectrum Sensing |
| SLI | Self-Loop Interference |
| SDFE | Soft-Decision Feedback Turbo Equalization |
| SNR | Signal-to-Noise Ratio |
| TH | Time Hopping |
| TDMA | Time Division Multiplexing |
| TRDC | Time Reversal Digital Cancellation |
| TH-CDMA | Time Hopping Code Division Multiple access |
| TFH-MAC | Two and fold hand-shaking medium access control |
| UWAC | Underwater Acoustic Communication |
References
- An, B.; Zhang, C.; Shang, D.; Xiao, Y.; Khan, I.U. A Combined Finite Element Method with Normal Mode for the Elastic Structural Acoustic Radiation in Shallow Water. J. Theor. Comput. Acoust. 2020, 28, 2050004. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, Y.; Shang, D.; Khan, I.U. A Method for Predicting Radiated Acoustic Field in Shallow Sea Based on Wave Superposition and Ray. Appl. Sci. 2020, 10, 917. [Google Scholar] [CrossRef]
- Muzzammil, M.; Ahmed, N.; Qiao, G.; Ullah, I.; Wan, L. Fundamentals and Advancements of Magnetic-Field Communication for Underwater Wireless Sensor Networks. IEEE Trans. Antennas Propag. 2020, 68, 7555–7570. [Google Scholar] [CrossRef]
- Khan, I.U.; Iqbal, B.; Songzou, L.; Li, H.; Qiao, G.; Khan, S. Full-duplex Underwater Optical Communication Systems: A Review. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021. [Google Scholar]
- Chen, Y.-J.; Wang, H.-L. Ordered CSMA: A collision-free MAC protocol for underwater acoustic networks. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Ma, Y.; Guo, Z.; Feng, Y.; Jiang, M.; Feng, G. C-MAC: A TDMA-based MAC protocol for underwater acoustic sensor networks. In Proceedings of the 2009 International Conference on Networks Security, Wireless Communications and Trusted Computing, Wuhan, China, 25–26 April 2009; pp. 728–731. [Google Scholar] [CrossRef]
- Chirdchoo, N.; Soh, W.-S.; Chua, K.C. Aloha-Based MAC Protocols with Collision Avoidance for Underwater Acoustic Networks. In Proceedings of the IEEE INFOCOM 2007—26th IEEE International Conference on Computer Communications, Anchorage, AK, USA, 6–12 May 2007; pp. 2271–2275. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, K.; He, J.; Guan, H. Enhanced Slotted Aloha Protocols for Underwater Sensor Networks with Large Propagation Delay. In Proceedings of the 2011 IEEE 73rd Vehicular Technology Conference (VTC Spring), Budapest, Hungary, 15–18 May 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Khan, I.U.; Islam, M.; Ismail, M.; Qazi, A.B.; Jan, S.; Ullah, I.; Farid, Z.; Wadud, Z. Adaptive hop-by-hop cone vector-based forwarding protocol for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720958305. [Google Scholar] [CrossRef]
- Xie, G.G.; Gibson, J.H. A network layer protocol for UANs to address propagation delay induced performance limitations. In Proceedings of the MTS/IEEE Oceans 2001. An Ocean Odyssey. Conference Proceedings (IEEE Cat. No.01CH37295), Honolulu, HI, USA, 5–8 November 2001; Volume 4, pp. 2087–2094. [Google Scholar]
- Gibson, J.; Larraza, A.; Rice, J.; Smith, K.; Xie, G. On the impacts and benefits of implementing full-duplex communications links in an underwater acoustic network. In Proceedings of the 5th International Mine Symposium, Naval Postgraduate School, Monterey, CA, USA, 22–26 April 2002; Volume 1, pp. 1–10. [Google Scholar]
- Kaushal, H.; Kaddoum, G. Underwater optical wireless communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Catipovic, J.A. Performance limitations in underwater acoustic telemetry. IEEE J. Ocean. Eng. 1990, 15, 205–216. [Google Scholar] [CrossRef]
- He, J.; Wen, X.; Chen, M.; Chen, L.; Su, J. Full-duplex multiband orthogonal frequency division multiplexing ultra-wideband over fiber system. Opt. Eng. 2015, 54, 16101. [Google Scholar] [CrossRef]
- Kochańska, I.; Lasota, H. Application of OFDM technique to underwater acoustic data transmission. Hydroacoustics 2011, 14, 91–98. [Google Scholar]
- Lasota, H.; Kochańska, I. Transmission parameters of underwater communication channels. Hydroacoustics 2011, 14, 119–126. [Google Scholar]
- Li, Y.; Zhang, W.; Xia, X.-G. Distributive High-Rate Space–Frequency Codes Achieving Full Cooperative and Multipath Di-versities for Asynchronous Cooperative Communications. IEEE Trans. Veh. Technol. 2008, 58, 207–217. [Google Scholar] [CrossRef]
- Li, Z.; Xia, X.-G.; Lee, M.H. A Simple Orthogonal Space-Time Coding Scheme for Asynchronous Cooperative Systems for Frequency Selective Fading Channels. IEEE Trans. Commun. 2010, 58, 2219–2224. [Google Scholar] [CrossRef]
- Salim, A.; Duman, T.M. An asynchronous two-way relay system with full delay diversity in time-varying multipath environments. In Proceedings of the 2015 International Conference on Computing, Networking and Communications (ICNC), Anaheim, CA, USA, 16–19 February 2015; pp. 900–904. [Google Scholar]
- Stojanovic, M. Low complexity OFDM detector for underwater acoustic channels. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Li, B.; Zhou, S.; Stojanovic, M.; Freitag, L. Pilot-tone based ZP-OFDM Demodulation for an Underwater Acoustic Channel. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Tian, J.; Yan, S.; Xu, L.; Xi, J. A time-reversal based digital cancelation scheme for in-band full-duplex underwater acoustic systems. In Proceedings of the OCEANS 2016—Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Qiao, G.; Gan, S.; Liu, S.; Song, Q. Self-Interference Channel Estimation Algorithm Based on Maximum-Likelihood Estimator in In-Band Full-Duplex Underwater Acoustic Communication System. IEEE Access 2018, 6, 62324–62334. [Google Scholar] [CrossRef]
- Qiao, G.; Gan, S.; Liu, S.; Ma, L.; Sun, Z. Digital Self-Interference Cancellation for Asynchronous In-Band Full-Duplex Underwater Acoustic Communication. Sensors 2018, 18, 1700. [Google Scholar] [CrossRef]
- Shen, L.; Henson, B.; Zakharov, Y.; Mitchell, P. Digital Self-Interference Cancellation for Full-Duplex Underwater Acoustic Systems. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 192–196. [Google Scholar] [CrossRef]
- Zakharov, Y.V.; White, G.P.; Liu, J. Low-Complexity RLS Algorithms Using Dichotomous Coordinate Descent Iterations. IEEE Trans. Signal Process. 2008, 56, 3150–3161. [Google Scholar] [CrossRef]
- Liu, J.; Zakharov, Y.; Weaver, B. Architecture and FPGA Design of Dichotomous Coordinate Descent Algorithms. IEEE Trans. Circuits Syst. I: Regul. Pap. 2009, 56, 2425–2438. [Google Scholar] [CrossRef]
- Zhao, Y.; Qiao, G.; Liu, S.; Zakharov, Y.; Ahmed, N. Self-interference channel modeling for in-band full-duplex underwater acoustic modem. Appl. Acoust. 2021, 175, 107687. [Google Scholar] [CrossRef]
- Kantaris, G.; Makris, N. Underwater wireless in-pipe communications system. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 1945–1950. [Google Scholar] [CrossRef]
- Zhang, J.; Ma, X.; Qiao, G.; Wang, C. A Full-Duplex Based Protocol for Underwater Acoustic Communication Networks. In Proceedings of the 2013 OCEANS—San Diego, San Diego, CA, USA, 23–27 September 2013. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.; Qiao, G. Full-duplex, Relative Clock Based and Collision Free Protocol for Underwater Acoustic Networks. In Proceedings of the In-ternational Conference on Computing for Engineering and Sciences, San Francisco, CA, USA, 22–24 October 2014; pp. 1–5. [Google Scholar]
- Makled, E.A.; Yadav, A.; Dobre, O.A.; Haynes, R.D. Hierarchical Full-Duplex Underwater Acoustic Network: A NOMA Approach. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, S.; Sun, Z.; Zhou, F. Full-duplex, multi-user and parameter reconfigurable underwater acoustic communication modem. In Proceedings of the 2013 OCEANS—San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Li, C.; Xu, Y.; Wang, Q.; Diao, B.; An, Z.; Chen, Z.; Luo, Z. FDCA: A Full-Duplex Collision Avoidance MAC Protocol for Underwater Acoustic Networks. IEEE Sens. J. 2016, 16, 4638–4647. [Google Scholar] [CrossRef]
- Qu, F.; Yang, H.; Yu, G.; Yang, L. In-Band Full-Duplex Communications for Underwater Acoustic Networks. IEEE Netw. 2017, 31, 59–65. [Google Scholar] [CrossRef]
- Kang, S.M.; Hwang, H.Y.; Cho, H.-S. A bidirectional full duplex medium access control protocol for underwater acoustic networks. J. Acoust. Soc. Korea 2017, 36, 211–217. [Google Scholar] [CrossRef]
- Zhao, Q.; Lambert, A.; Benson, C.R. FS-MACA: A future scheduling mac protocol in underwater acoustic networks. In Proceedings of the International Conference on Underwater Networks & Systems, Rome, Italy, 12–14 November 2014. [Google Scholar] [CrossRef]
- Songzuo, L.; Iqbal, B.; Khan, I.U.; Li, H.; Qiao, G. An Enhanced Full-Duplex MAC Protocol for an Underwater Acoustic Network. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 894–898. [Google Scholar] [CrossRef]
- Mengxua, L.; Weidong, L.; Liyuan, Z. FDCP: A High-Throughput Collision-Avoidance MAC Protocol for Underwater Acoustic Networks. In Proceedings of the 2013 IEEE 9th International Conference on Mobile Ad-hoc and Sensor Networks, Dalian, China, 11–13 December 2013; pp. 109–114. [Google Scholar] [CrossRef]
- Rahmati, M.; Duman, T.M. Achieving Delay Diversity in Asynchronous Underwater Acoustic (UWA) Cooperative Commu-nication Systems. IEEE Trans. Wirel. Commun. 2014, 13, 1367–1379. [Google Scholar] [CrossRef]
- Li, L.; Song, A.; Cimini, L.J.; Xia, X.; Shen, C. Interference cancellation in in-band full-duplex underwater acoustic systems. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, J.; Cui, Y.; Sun, H.; Liu, L.; Ma, S. Full-Duplex Cognitive Underwater Acoustic Communications: Concept and Challenges. In Proceedings of the 2018 14th IEEE International Conference on Signal Processing (ICSP), Beijing, China, 12–16 August 2018; pp. 698–701. [Google Scholar] [CrossRef]
- Hsieh, Y.-T.; Rahmati, M.; Pompili, D. FD-UWA: Full-Duplex Underwater Acoustic Comms via Self-Interference Cancellation in Space. In Proceedings of the 2020 IEEE 17th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Delhi, India, 10–13 December 2020; pp. 256–264. [Google Scholar] [CrossRef]
- Jebur, B.A.; Healy, C.T.; Tsimenidis, C.C.; Neasham, J.; Chambers, J. In-Band Full-Duplex Interference for Underwater Acoustic Communication Systems. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Martins, M.S.; Pinto, N.; Carmo, J.P.; Cabral, J. High data rate acoustic modem for underwater aplications. In Proceedings of the 2014 International Telecommunications Symposium (ITS), Sao Paulo, Brazil, 17–20 August 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Xie, G.G.; Gibson, J.H.; Bektas, K. Evaluating the Feasibility of Establishing Full-Duplex Underwater Acoustic Channels; Naval Postgraduate School Monterey CA Dept Of Computer Science: Monterey, CA, USA, 2004. [Google Scholar]
- Sozer, E.M.; Stojanovic, M.; Proakis, J.G. Underwater acoustic networks. IEEE J. Ocean. Eng. 2000, 25, 72–83. [Google Scholar] [CrossRef]
- Qiao, G.; Babar, Z.; Ma, L.; Liu, S.; Wu, J. MIMO-OFDM underwater acoustic communication systems—A review. Phys. Commun. 2017, 23, 56–64. [Google Scholar] [CrossRef]
- Lu, Q.; Shengming, J. A review of routing protocols of underwater acoustic sensor networks from application perspective. In Proceedings of the 2016 IEEE International Conference on Communication Systems (ICCS), Shenzhen, China, 14–16 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Ma, L.; Qiao, G.; Liu, S. A Combined Doppler Scale Estimation Scheme for Underwater Acoustic OFDM System. J. Comput. Acoust. 2015, 23, 1540004. [Google Scholar] [CrossRef]
- Beheshti, M.; Omidi, M.J.; Doost-Hoseini, A.M. Joint ICI and IBI cancelation for underwater acoustic MIMO-OFDM systems. In Proceedings of the 2011 19th Iranian Conference on Electrical Engineering, Tehran, Iran, 17–19 May 2011; pp. 1–5. [Google Scholar]
- Ma, L.; Jia, H.; Liu, S.; Khan, I.U. Low-Complexity Doppler Compensation Algorithm for Underwater Acoustic OFDM Systems with Nonuniform Doppler Shifts. IEEE Commun. Lett. 2020, 24, 2051–2054. [Google Scholar] [CrossRef]
- Fang, T.; Liu, S.; Ma, L.; Zhang, L.; Khan, I.U. Subcarrier modulation identification of underwater acoustic OFDM based on block expectation maximization and likelihood. Appl. Acoust. 2021, 173, 107654. [Google Scholar] [CrossRef]
- Chithra, K.; Sireesha, N.; Thangavel, C.; Gowthaman, V.; Narayanan, S.S.; Sudhakar, T. Underwater Communication Implemen-tation with OFDM; NISCAIR-CSIR: New Delhi, India, 2015. [Google Scholar]
- Gore, D.; Sandhu, S.; Paulraj, A. Delay diversity codes for frequency selective channels. In Proceedings of the 2002 IEEE International Conference on Communications. Conference Proceedings. ICC 2002 (Cat. No.02CH37333), New York, NY, USA, 28 April–2 May 2002; Volume 3, pp. 1949–1953. [Google Scholar] [CrossRef]
- Li, Z.; Xia, X.-G.; Li, B. Achieving full diversity and fast ML decoding via simple analog network coding for asynchronous two-way relay networks. IEEE Trans. Commun. 2009, 57, 3672–3681. [Google Scholar] [CrossRef]
- Qiao, G.; Zhao, Y.; Liu, S.; Ahmed, N. The effect of acoustic-shell coupling on near-end self-interference signal of in-band full-duplex underwater acoustic communication modem. In Proceedings of the 2020 17th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 14–18 January 2020; pp. 606–610. [Google Scholar] [CrossRef]
- Bharadia, D.; McMilin, E.; Katti, S. Full duplex radios. In Proceedings of the ACM SIGCOMM Computer Communication Re-view, Hong Kong, China, 12–16 August 2013. [Google Scholar]
- Shen, L.; Henson, B.; Zakharov, Y.; Mitchell, P.D. Adaptive Nonlinear Equalizer for Full-Duplex Underwater Acoustic Systems. IEEE Access 2020, 8, 108169–108178. [Google Scholar] [CrossRef]
- Yang, T.; Yang, W.-B. Low probability of detection underwater acoustic communications using direct-sequence spread spec-trum. J. Acoust. Soc. Am. 2008, 124, 3632–3647. [Google Scholar] [CrossRef]
- Yang, T.; Yang, W.-B. Low probability of detection underwater acoustic communications for mobile platforms. In Proceedings of the OCEANS, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Mistry, K.; Modi, H. Design of high data rate and multipath efficient underwater acoustic communication system using OFDM–DQPSK. In Proceedings of the International Conference on ICT for Sustainable Development, Amsterdam, The Netherlands, 29 August–1 September 2016. [Google Scholar]
- Borowski, B. Characterization of a very shallow water acoustic communication channel. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–10. [Google Scholar] [CrossRef]
- Kun, Z.; Sen, Q.S.; Aik, K.T.; Aik, T.B. A Real-Time Coded OFDM Acoustic Modem in Very Shallow Underwater Communica-tions. In Proceedings of the OCEANS 2006-Asia Pacific, Singapore, 16–19 May 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Yan, H.; Zhou, S.; Shi, Z.; Cui, J.-H.; Wan, L.; Huang, J.; Zhou, H. DSP implementation of SISO and MIMO OFDM acoustic modems. In Proceedings of the OCEANS’10 IEEE SYDNEY 2010, Sydney, Australia, 24–27 May 2010. [Google Scholar] [CrossRef]
- Rodoplu, V.; Park, M.K. An energy-efficient MAC protocol for underwater wireless acoustic networks. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; Volume 2, pp. 1198–1203. [Google Scholar] [CrossRef]
- Chitre, M.; Shahabudeen, S.; Freitag, L.; Stojanovic, M. Recent advances in underwater acoustic communications & net-working. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–10. [Google Scholar] [CrossRef]
- Zhuo, X.; Liu, M.; Qu, F.; Wei, Y.; Li, J. A Two-Fold Handshaking Full-Duplex MAC Protocol for Underwater Acoustic Com-munication Networks. In Proceedings of the International Conference on Underwater Networks & Systems, Atlanta, GA, USA, 23–25 October 2019. [Google Scholar] [CrossRef]
- Chen, K.; Ma, M.; Cheng, E.; Yuan, F.; Su, W. A Survey on MAC Protocols for Underwater Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2014, 16, 1433–1447. [Google Scholar] [CrossRef]
- Ng, H.-H.; Soh, W.-S.; Motani, M. MACA-U: A Media Access Protocol for Underwater Acoustic Networks. In Proceedings of the IEEE GLOBECOM 2008–2008 IEEE Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; pp. 1–5. [Google Scholar]
- Yin, Y.; Roy, S.; Arabshahi, P. A modified CSMA/CA protocol for OFDM underwater networks: Cross layer design. In Proceedings of the 10th International Conference on Underwater Networks & Systems, Arlington, VA, USA, 22–24 October 2015. [Google Scholar] [CrossRef]
- Samad, S.A.; Shenoy, S.; Kumar, G.S. Improving energy efficiency of underwater acoustic sensor networks using transmis-sion power control: A cross-layer approach. In Proceedings of the International Conference on Advances in Computing and Communications, Kochi, India, 22–24 July 2011. [Google Scholar]
- Xie, P.; Cui, J.-H. R-MAC: An energy-efficient MAC protocol for underwater sensor networks. In Proceedings of the Interna-tional Conference on Wireless Algorithms, Systems and Applications (WASA 2007), Chicago, IL, USA, 1–3 August 2007. [Google Scholar]
- Kuo, L.-C.; Melodia, T. Cross-Layer routing on MIMO-OFDM underwater acoustic links. In Proceedings of the 2012 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 227–235. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, X.; Cai, X. On the number of relays for orthogonalize-and-forward relaying. In Proceedings of the 2011 International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 9–11 November 2011; pp. 1–5. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Type | Name/Ref. | Modulation | Implementation | Performance Metrics | ||||
|---|---|---|---|---|---|---|---|---|
| Spectral Efficiency | BER | Transmission Range | SNR | Data Rate | ||||
| Cooperative OFDM | AUA-CCS [40] | OFDM | Simulation | High | Low | NA | Low | High |
| A-DTWRS [19] | OFDM | Simulation | Moderate | High | NA | High | Low | |
| OFDM-IBFD | HSIC [41] | OFDM | Deep sea water | Enhance | NA | Very low | NA | NA |
| TRDC [22] | OFDM | Deep sea water | Moderate | Low | High | low | NA | |
| ML-SC-IBFD [23] | OFDM | Pool water | Enhance | Low | Medium | Moderate | NA | |
| A-IBFD [24] | OFDM | Pool water | Moderate | High | Medium | High | NA | |
| ASIC [44], | OFDM | Shallow water | NA | NA | NA | NA | NA | |
| Digital modulation | RLS adaptive filter [25] | BPSK | Water Tank | Very low | NA | Low | NA | Low |
| ANE [60] | BPSK | Water Tank | Low | NA | Very Low | NA | Low | |
| FSK-UWAC [29] | FSK | Laboratory set-up | High | NA | High | NA | Moderate | |
| Spread spectrum | Hybrid- SS [33] | DSSS | Shallow water | High | NA | High | High | Medium |
| System Type | Ref. | Modulation | Data Rate | Implementation | Performance Matrices | ||||
|---|---|---|---|---|---|---|---|---|---|
| BER | Efficiency | Transmission Range | Power Consumption | SNR | |||||
| Physical layer-based FD-Modems | [33] | OFDM | Low | Shallow water | NA | Medium | High | High | High |
| [45] | OOK | High | Swimming pool | Low | High | Low | Low | Low | |
| Parameters | Values |
|---|---|
| Transmission range | 500 m |
| Channel Bit rate | 1000 bps |
| Bandwidth | 10 Hz |
| Frequency range | 12 kHz–22 kHz |
| RTS, CTS, ACK | 64 bits |
| Data packets | 1024 bits |
| Transmission power | 8 Watt |
| Parameters | Values |
| RTS/CTS | 64 bits |
| Data Packets | 1024 bits |
| Transmission rate | 500 bps |
| Propagation range | 0.5 km |
| Power consumption | |
| At transmission | 10 W |
| At reception | 80 mW |
| Control packets | |
| Modulation/Demodulation | DSSS |
| Frequency | 6–8 kHz |
| Data Packets | |
| Modulation/Demodulation | OFDM |
| Frequency | 4–6 Hz |
| Success Rate | 95% |
| Protocol Type | Name/Ref. | Network Type | Implementation | Performance Matrices | ||||
|---|---|---|---|---|---|---|---|---|
| Throughput | Delay Efficiency | Energy Efficiency | Transmission Range | Data Rate | ||||
| Contention-free | CDMA [46] | Ad hoc | Shallow water | Low | Low | Moderate | 15 feet | NA |
| Hybrid CDMA [46] | Ad hoc | Shallow water | Moderate | Low | Moderate | 15 feet | NA | |
| FH-CDMA [46] | Ad hoc | Shallow water | High | Low | Moderate | 15 feet | NA | |
| Hand –Shaking | BD-FD-MAC [36] | Single hop | Simulation | High | High | Enhanced | NA | NA |
| IBFD-MAC [35] | NA | simulation | Medium | Low | Moderate | Very Low | Moderate | |
| DA-CSMA [30] | Ad hoc | Shallow water | High | High | Low | Low | Low | |
| FS-MACA [37] | distributed Ad hoc network | simulation | Medium | Moderate | Very Low | High | High | |
| FDCA-MAC [34] | Single hop | SEA-Swarm network | Moderate | Moderate | Enhanced | Moderate | Very Low | |
| Multi-hop | ||||||||
| TFH-MAC [69] | NA | Simulation | High | Very Low | Enhanced | NA | NA | |
| E-FD-MAC [38] | Single hop | Simulation | High | High | Enhanced | NA | NA | |
| Random Access | FDCP-MAC [39] | Multi-hop Ad hoc | Simulation | Low | Moderate | Moderate | Very High | High |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Songzuo, L.; Iqbal, B.; Khan, I.U.; Ahmed, N.; Qiao, G.; Zhou, F. Full Duplex Physical and MAC Layer-Based Underwater Wireless Communication Systems and Protocols: Opportunities, Challenges, and Future Directions. J. Mar. Sci. Eng. 2021, 9, 468. https://doi.org/10.3390/jmse9050468
Songzuo L, Iqbal B, Khan IU, Ahmed N, Qiao G, Zhou F. Full Duplex Physical and MAC Layer-Based Underwater Wireless Communication Systems and Protocols: Opportunities, Challenges, and Future Directions. Journal of Marine Science and Engineering. 2021; 9(5):468. https://doi.org/10.3390/jmse9050468
Chicago/Turabian StyleSongzuo, Liu, Basit Iqbal, Imran Ullah Khan, Niaz Ahmed, Gang Qiao, and Feng Zhou. 2021. "Full Duplex Physical and MAC Layer-Based Underwater Wireless Communication Systems and Protocols: Opportunities, Challenges, and Future Directions" Journal of Marine Science and Engineering 9, no. 5: 468. https://doi.org/10.3390/jmse9050468
APA StyleSongzuo, L., Iqbal, B., Khan, I. U., Ahmed, N., Qiao, G., & Zhou, F. (2021). Full Duplex Physical and MAC Layer-Based Underwater Wireless Communication Systems and Protocols: Opportunities, Challenges, and Future Directions. Journal of Marine Science and Engineering, 9(5), 468. https://doi.org/10.3390/jmse9050468