
Rapid Assessment of Tsunami Offshore Propagation and Inundation with D-FLOW Flexible Mesh and SFINCS for the 2011 Tōhoku Tsunami in Japan

 ,
,
Abstract
1. Introduction
2. Materials and Methods
- (1)
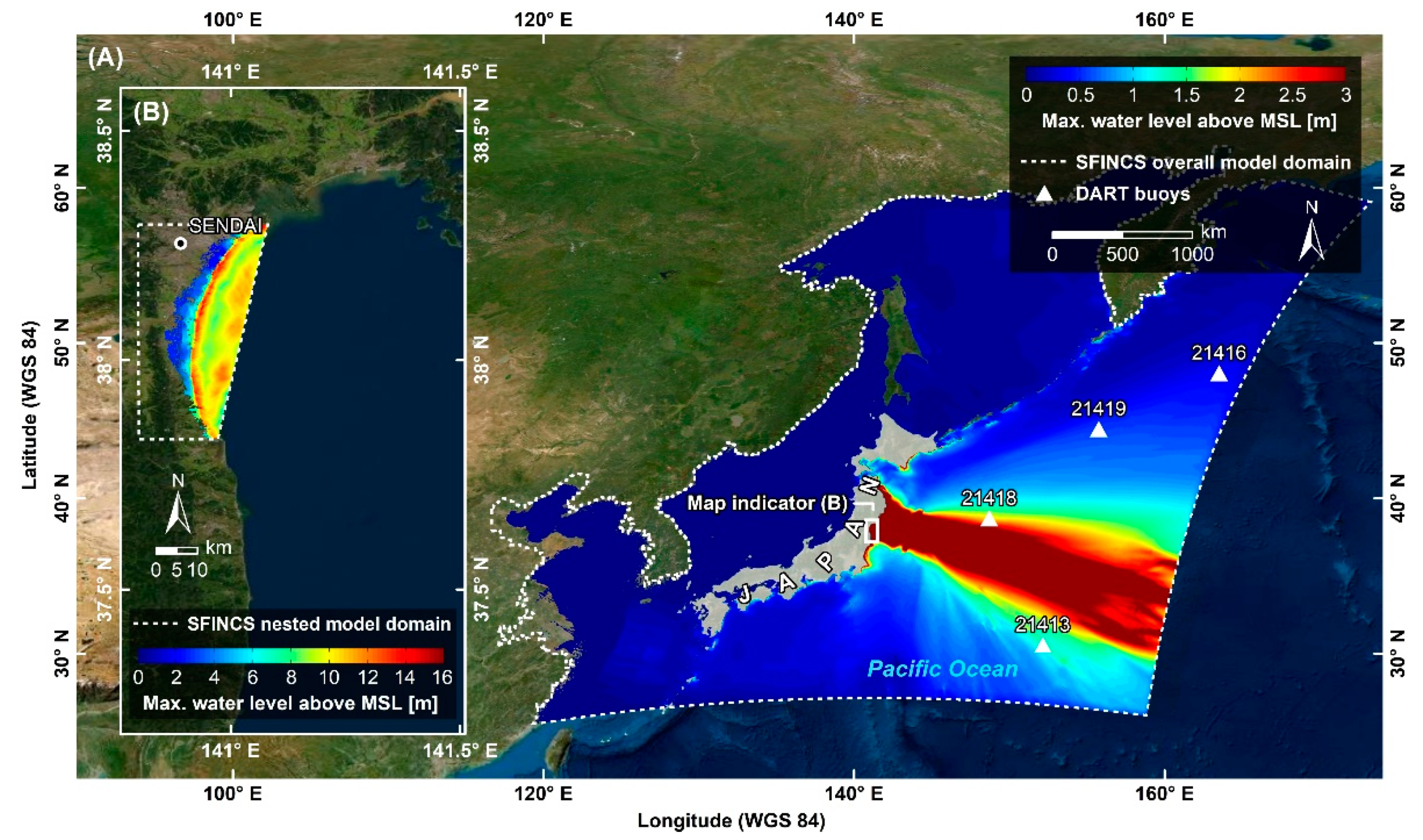
- Based on an all-in-one FM model, both the tsunami propagation in the north-eastern Pacific and inundation at the coast of the Sendai Bay are simulated within a single model domain (no nesting required; Figure 2A).
- (2)
- Based on the all-in-one FM model, the tsunami propagation is simulated, while the inundation is simulated with a nested SFINCS model (a similar approach as needed for the D3D reference model; Figure 2B), which is forced with hydrodynamic boundary conditions derived from the all-in-one FM model.
- (3)
- Same as (2) but the nested SFINCS model is forced with hydrodynamic boundary conditions derived from an overall SFINCS model in order to also test the ability of SFINCS to reproduce deep-water tsunami wave propagation (Figure 2B).
- (4)
- The D3D reference model is a further developed model based on [7] (separated in an overall and nested model; Figure 2B), using updated topography data, bottom roughness and initial tsunami water levels as applied in the other models of this study (Section 2.1).
2.1. Delft3D-FLOW Reference Model
- In order to increase the accuracy of the model’s topography, the onshore elevation data were changed from SRTM (Shuttle Radar Topography Mission; [34]) data to more accurate ALOS (Advanced Land Observing Satellite, [35]) data with a spatial resolution of 30 m. The ALOS data were referenced to local mean sea level (MSL) using the DTU10 Mean Dynamic Topography dataset [36]. The ALOS topography data were merged with GEBCO (General Bathymetric Chart of the Oceans) bathymetry data [37] as used by [7].
- It was found that to simulate the maximum onshore water levels more accurately, the bottom roughness had to be increased, as suggested by [38] for the application of depth-integrated tsunami inundation models. Based on this and on several tests with different bottom roughness fields in the FM model (Section 2.2), we therefore applied a Manning’s n coefficient of 0.025 s m−1/3 offshore and a higher value of 0.1 s m−1/3 onshore in the D3D, FM and SFINCS models. These values yielded the best reproduction of the observed water levels and inland penetration at the coast of the Sendai Bay over the three applied models.
- Finally, the initial displacement of the water column was calculated more accurately based on fault segment data by [28]. These data contain information on the location, depth, slip, rake, strike and dip for 190 separate fault segments. The total length of the applied fault line amounts to approximately 500 km [28]. The fault segment data were processed using the DDB Tsunami Toolbox [7]. This toolbox makes use of a set of analytical expressions by [39] (referred to as the Okada model) to model fluid surface deformation fields (in two dimensions) caused by seafloor displacement during earthquakes. Based on this input, the DDB tool generates a spatially varying initial water level field interpolated on the computational grid/mesh of the D3D/SFINCS/FM models, representing the initial tsunami wave. The use of the fault segment data by [28] results in a steeper and higher initial tsunami wave with a shorter wave period compared to [7].
2.2. D-FLOW Flexible Mesh Model
2.3. SFINCS Model
3. Results
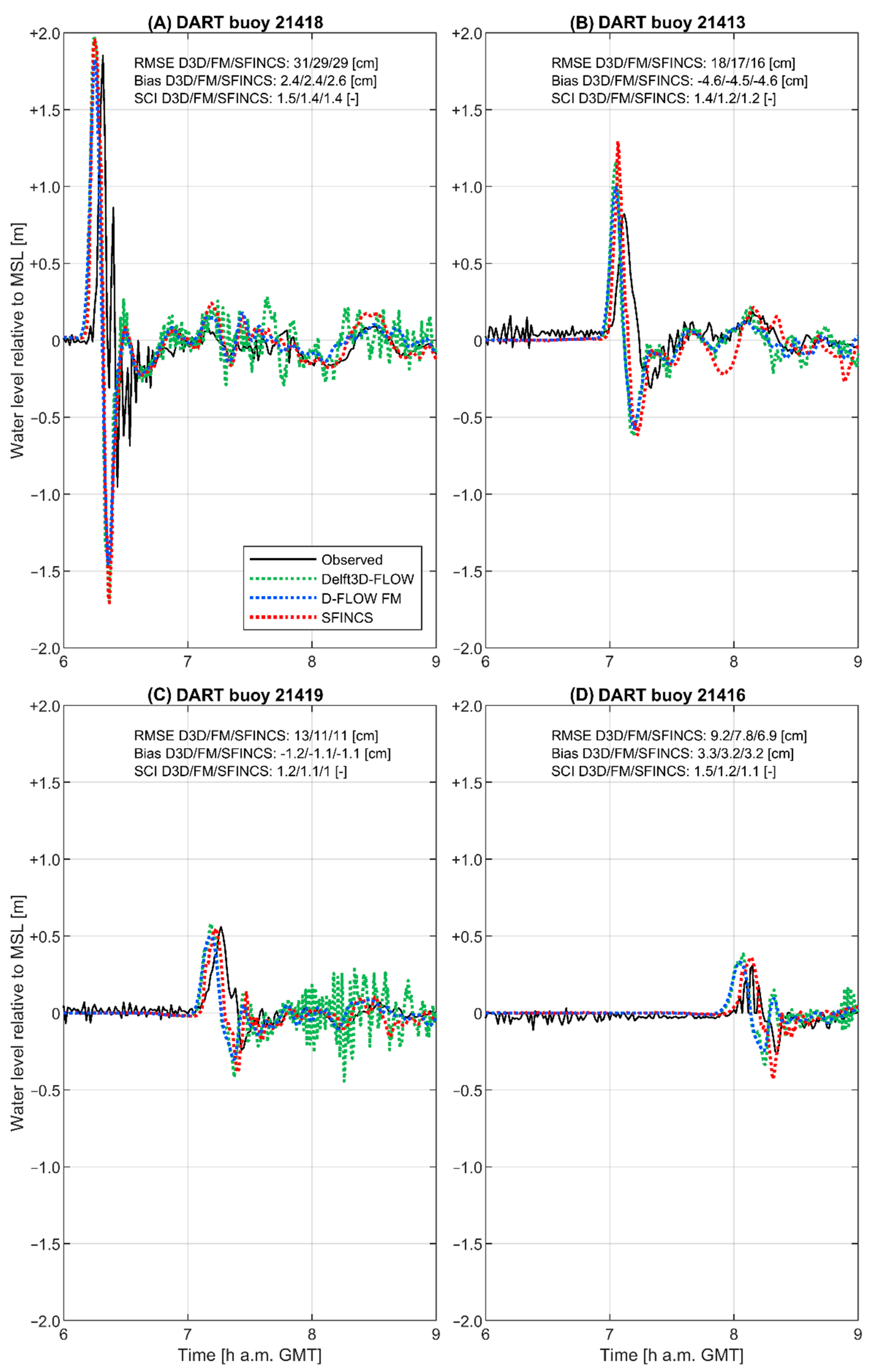
3.1. Tsunami Propagation
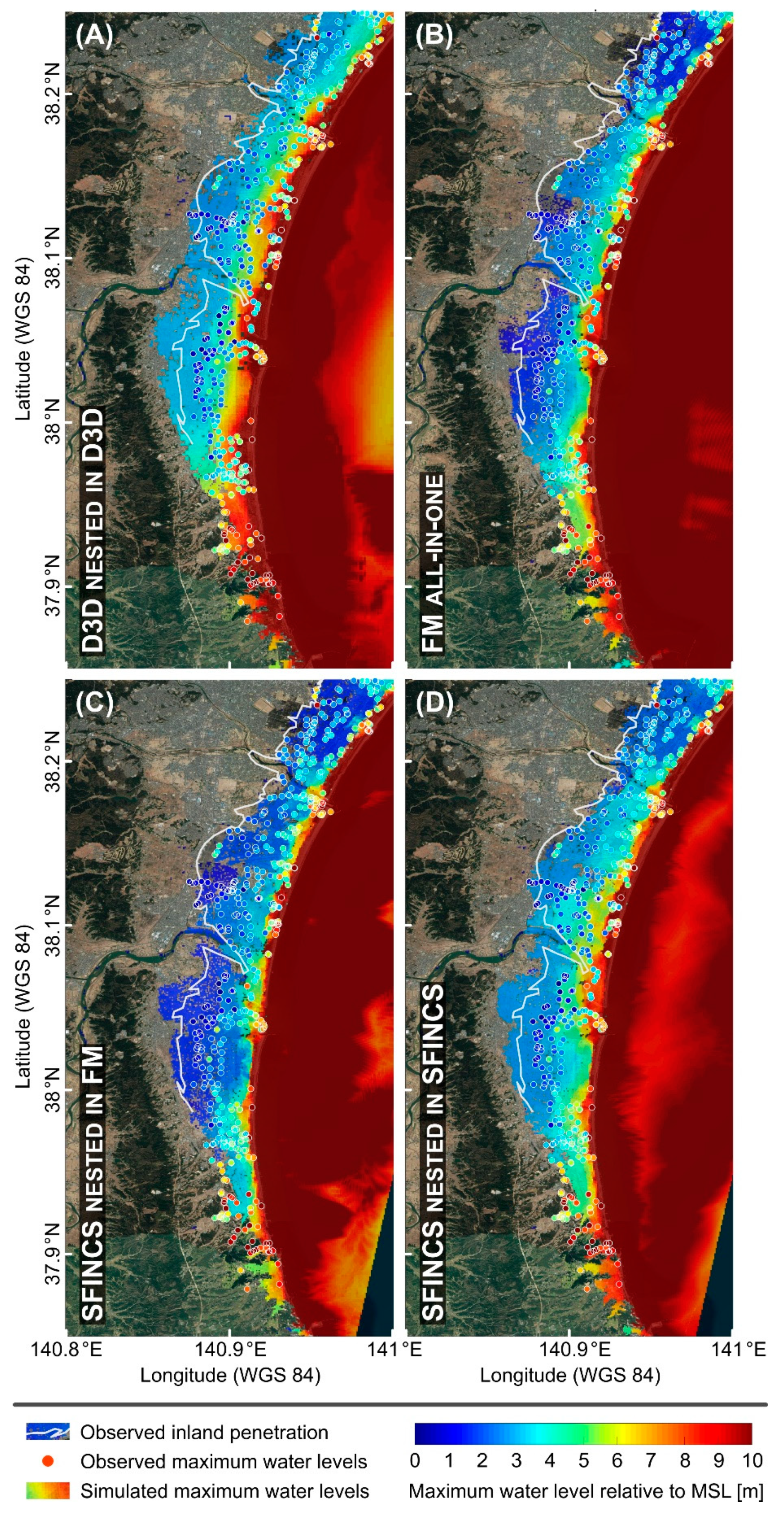
3.2. Tsunami Inundation
3.3. Computational Time
4. Discussion
- The Okada model applied for the generation of the initial tsunami wave does—in contrast to the finite-fault model used, e.g., by [46,47]—not account for the slip time history over the prescribed rupture plane (i.e., the chronology of the individual ruptures of the earthquake), which can be important for the tsunami wave excitation.
- The applied Okada model does—in contrast to the finite-fault model used, e.g., by [46,47]—not account for the velocity of the individual ruptures of the earthquake which determines to which degree the water column responds to the crust movement and to which degree the wave energy is beamed at a right angle to the fault lines, cf. [3,48]. This is likely important for the tsunami wave excitation due to the relatively slow rupture velocity of the Tōhoku earthquake [26].
- inaccuracies of the applied initial displacement of the water column due to the reasons mentioned above,
- inaccuracies of the nearshore and onshore elevation data (inaccuracies related to the crustal deformation due to the earthquake are assumed to have a minor impact since the subsidence in the area of the Sendai coast was limited to 0.18 m to 0.31 m [49]) and/or
- the fact that both models do not account for the tidal water levels in the Sendai Bay at the time of the tsunami impact, which may affect the tsunami propagation and inundation in the models (tidal elevations were subtracted from the observed inundation water levels but not applied in the model; cf. Section 2).
5. Conclusions
- The DDB Tsunami Toolbox with the implemented Okada model allows for an efficient determination of the initial tsunami wave, cf. [7].
- FM and SFINCS can simulate the tsunami propagation and inundation within minutes to seconds respectively, i.e., much shorter than real-time. Nevertheless, it has to be stressed that real-time prediction would rely on the information of the seafloor displacement provided by either a moment tensor solution or a finite fault solution, both of which were not available before the tsunami hit the Japanese coast in 2011.
- The use of an unstructured computational mesh by the D-FLOW Flexible Mesh module allows for the simulation of both the tsunami propagation and inundation within an all-in-one domain with high resolution in the area of interest, allowing for a fast and efficient model setup. An additional feature of this module is the possibility to include the simulation of sediment transport and morphodynamics associated with the tsunami inundation, cf. [14,50], which makes it a broadly applicable tool for the numerical simulation of tsunamis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shishikura, M.; Sawai, Y.; Namegaya, Y. Reconstruction of the 869 Jōgan earthquake, the predecessor of the 2011 Tōhoku earthquake, by geological evidence combined with tsunami simulation. In Proceedings of the TC302 Symposium; Iwasaki, Y., Ed.; Kyoto University: Osaka, Japan, 2011; pp. 25–28. [Google Scholar]
- Sugawara, D.; Goto, K.; Imamura, F.; Matsumoto, H.; Minoura, K. Assessing the magnitude of the 869 Jōgan tsunami using sedimentary deposits: Prediction and consequence of the 2011 Tōhoku-oki tsunami. Sediment. Geol. 2012, 282, 14–26. [Google Scholar] [CrossRef]
- Röbke, B.R.; Vött, A. The tsunami phenomenon. Prog. Oceanogr. 2017, 159, 296–322. [Google Scholar] [CrossRef]
- Kernkamp, H.W.J.; van Dam, A.; Stelling, G.S.; de Goede, E.D. Efficient scheme for the shallow water equations on unstructured grids with application to the Continental Shelf. Ocean Dyn. 2011, 61, 1175–1188. [Google Scholar] [CrossRef]
- Deltares. Delft3D-FLOW. Simulation of Multi-Dimensional Hydrodynamic Flows and Transport Phenomena, Including Sediments. User Manual, Version 3.15.65593. 2020. Available online: https://content.oss.deltares.nl/delft3d/manuals/Delft3D-FLOW_User_Manual.pdf (accessed on 1 July 2020).
- Leijnse, T.; van Ormondt, M.; Nederhoff, K.; van Dongeren, A. Modeling compound flooding in coastal systems using a computationally efficient reduced physics solver: Including fluvial, pluvial, tidal, wind- and wave-driven processes. Coast. Eng. 2021, 163, 1–18. [Google Scholar] [CrossRef]
- van Ormondt, M.; Nederhoff, K.; van Dongeren, A. Delft Dashboard: A quick set-up tool for hydrodynamic models. J. Hydrodyn. 2020, 22, 510–527. [Google Scholar] [CrossRef]
- Apotsos, A.; Buckley, M.; Gelfenbaum, G.; Jaffe, B.; Vatvani, D. Nearshore tsunami inundation model validation: Toward sediment transport applications. Pure Appl. Geophys. 2011, 168, 2097–2119. [Google Scholar] [CrossRef]
- Apotsos, A.; Jaffe, B.; Gelfenbaum, G. Wave characteristic and morphologic effects on the onshore hydrodynamic response of tsunamis. Coast. Eng. 2011, 58, 1034–1048. [Google Scholar] [CrossRef]
- Apotsos, A.; Gelfenbaum, G.; Jaffe, B. Time-dependent onshore tsunami response. Coast. Eng. 2012, 64, 73–86. [Google Scholar] [CrossRef]
- Röbke, B.R.; Schüttrumpf, H.; Wöffler, T.; Fischer, P.; Hadler, H.; Ntageretzis, K.; Willershäuser, T.; Vött, A. Tsunami inundation scenarios for the Gulf of Kyparissia (western Peloponnese, Greece) derived from numerical simulations and geo-scientific field evidence. Z. Für Geomorphol. Suppl. Issues 2013, 57, 69–104. [Google Scholar] [CrossRef]
- Röbke, B.R.; Vött, A.; Willershäuser, T.; Fischer, P.; Hadler, H. Considering coastal palaeogeographical changes in a numerical tsunami model—A progressive base to compare simulation results with field traces from three coastal settings in western Greece. Z. Für Geomorphol. Suppl. Issues 2015, 59, 157–188. [Google Scholar] [CrossRef]
- Röbke, B.R.; Schüttrumpf, H.; Vött, A. Effects of different boundary conditions and palaeotopographies on the onshore response of tsunamis in a numerical model—A case study from western Greece. Cont. Shelf Res. 2016, 124, 182–199. [Google Scholar] [CrossRef]
- Röbke, B.; Schüttrumpf, H.; Vött, A. Hydro- and morphodynamic tsunami simulations for the Ambrakian Gulf (Greece) and comparison with geoscientific field traces. Geophys. J. Int. 2018, 213, 317–339. [Google Scholar] [CrossRef]
- Chacón-Barrantes, S.; Narayanan, R.; Mayerle, R. Several tsunami scenarios at the North Sea and their consequences at the German Bight. J. Tsunami Soc. Int. 2013, 32, 8–28. [Google Scholar]
- Períañez, R.; Abril, J. Modelling tsunamis in the Eastern Mediterranean Sea. Application to the Minoan Santorini tsunami sequence as a potential scenario for the biblical Exodus. J. Mar. Syst. 2014, 139, 91–102. [Google Scholar] [CrossRef]
- Períañez, R.; Abril, J. A numerical modeling study on oceanographic conditions in the former Gulf of Tartessos (SW Iberia): Tides and tsunami propagation. J. Mar. Syst. 2014, 139, 68–78. [Google Scholar] [CrossRef]
- Gelfenbaum, G.; Vatvani, D.; Jaffe, B.; Dekker, F. Tsunami inundation and sediment transport in vicinity of coastal mangrove forest. In Coastal Sediments ’07; Kraus, N., Rosati, J., Eds.; American Society of Civil Engineers: New Orleans, LA, USA, 2007; pp. 1117–1128. [Google Scholar] [CrossRef]
- Apotsos, A.; Jaffe, B.; Gelfenbaum, G.; Elias, E. Modeling time-varying tsunami sediment deposition. In Proceedings of Coastal Dynamics; Mizuguchi, M., Sato, S., Eds.; World Scientific: Tokyo, Japan, 2009; pp. 1–15. [Google Scholar] [CrossRef]
- Apotsos, A.; Gelfenbaum, G.; Jaffe, B. Process-based modeling of tsunami inundation and sediment transport. J. Geophys. Res. Earth Surf. 2011, 116, 1–20. [Google Scholar] [CrossRef]
- Apotsos, A.; Gelfenbaum, G.; Jaffe, B.; Watt, S.; Peck, B.; Buckley, M.; Stevens, A. Tsunami inundation and sediment transport in a sediment limited embayment on American Samoa. Earth Sci. Rev. 2011, 107, 1–11. [Google Scholar] [CrossRef]
- Leijnse, T.; Nederhoff, K.; Van Dongeren, A.; Mccall, R.T.; Van Ormondt, M. Improving computational efficiency of compound flooding simulations: The SFINCS model with subgrid features. In AGU Fall Meeting; AGU: Washington, DC, USA, 2020. [Google Scholar]
- Mori, N.; Takahashi, T.; Yasuda, T.; Yanagisawa, H. Survey of 2011 Tōhoku earthquake tsunami inundation and run-up. Geophys. Res. Lett. 2011, 38, 1–6. [Google Scholar] [CrossRef]
- NGDC/WDS—National Geophysical Data Center/World Data Service. Global Historical Tsunami Database. Tsunami Event Data. 2015. Available online: http://www.ngdc.noaa.gov/hazard/tsu_db.shtml (accessed on 15 December 2015).
- Daniell, J.; Vervaeck, A. Damaging Earthquakes Database 2011—The Year in Review. 2012. Available online: http://www.cedim.de/download/CATDATDamagingEarthquakesDatabase2011AnnualReview.pdf (accessed on 15 December 2015).
- Hwang, R.-D. First-order rupture features of the 2011 Mw 9.0 Tōhoku (Japan) earthquake from surface waves. J. Asian Earth Sci. 2004, 81, 20–27. [Google Scholar] [CrossRef]
- Fujii, Y.; Satake, K.; Sakai, S.; Shinohara, M.; Kanazawa, T. Tsunami source of the 2011 off the Pacific coast of Tōhoku earthquake. Earth Planets Space 2011, 63, 815–820. [Google Scholar] [CrossRef]
- Shao, G.; Li, X.; Ji, C.; Maeda, T. Focal mechanism and slip history of the 2011 Mw 9.1 off the Pacific coast of Tōhoku earthquake, constrained with teleseismic body and surface waves. Earth Planets Space 2011, 63, 559–564. [Google Scholar] [CrossRef]
- Lin, A.; Ikuta, R.; Rao, G. Tsunami run-up associated with co-seismic thrust slip produced by the 2011 Mw 9.0 Off Pacific Coast of Tōhoku earthquake, Japan. Earth Planet. Sci. Lett. 2012, 337–338, 121–132. [Google Scholar] [CrossRef]
- Maercklin, N.; Festa, G.; Colombelli, S.; Zollo, A. Twin ruptures grew to build up the giant 2011 Tohoku, Japan, earthquake. Sci. Rep. 2012, 2, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Esteban, M.; Tsimopoulou, V.; Mikami, T.; Yun, N.; Suppasri, A.; Shibayama, T. Recent tsunami events and preparedness: Development of tsunami awareness in Indonesia, Chile and Japan. Int. J. Disaster Risk Reduct. 2013, 5, 84–97. [Google Scholar] [CrossRef]
- NOAA—National Oceanic and Atmospheric Administration. March 11, 2011 DART©data. 2011. Available online: https://www.ngdc.noaa.gov/hazard/dart/2011Honshū_dart.html (accessed on 6 May 2020).
- Mori, N.; Takahashi, T.; Esteban, M. Nationwide post event survey and analysis of the 2011 Tohoku earthquake tsunami. Coast. Eng. J. 2012, 54, 1–27. [Google Scholar] [CrossRef]
- Jarvis, A.; Reuter, H.; Nelson, A.; Guevara, E. Hole-Filled Seamless SRTM Data V4, International Centre for Tropical Agriculture (CIAT). 2008. Available online: http://srtm.csi.cgiar.org (accessed on 8 April 2014).
- JAXA—Japan Aerospace Exploration Agency. ALOS World 3D–30 m (AW3D30). Version 3.1. 2020. Available online: https://www.eorc.jaxa.jp/ALOS/en/aw3d30/index.htm (accessed on 12 March 2021).
- Andersen, O.B.; Knudsen, P. The DNSC08 mean sea surface and mean dynamic topography. J. Geophys. Res. Ocean. 2009, 114, 1–12. [Google Scholar] [CrossRef]
- IOC—Intergovernmental Oceanographic Commission; UNESCO—United Nations Educational, Scientific and Cultural Organization. General Bathymetric Chart of the Oceans (GEBCO). GEBCO 2019 Grid. Liverpool. 2019. Available online: https://www.gebco.net/data_and_products/historical_data_sets/#gebco_2019/ (accessed on 26 April 2020).
- Bricker, J.D.; Gibson, S.; Takagi, H.; Imamura, F. On the need for larger Manning’s roughness coefficients in depth-integrated tsunami inundation models. Coast. Eng. J. 2015, 57, 1550005-1–1550005-13. [Google Scholar] [CrossRef]
- Okada, Y. Surface deformation due to shear and tensile faults in a halfspace. Bull. Seismol. Soc. Am. 1985, 75, 1135–1154. [Google Scholar] [CrossRef]
- Verboom, G.; Slob, A. Weakly-reflective boundary conditions for twodimensional shallow water flow problems. Adv. Water Resour. 1984, 7, 192–197. [Google Scholar] [CrossRef]
- van Dongeren, A.; Svendsen, A. Quasi 3-D modeling of nearshore hydrodynamics. In Research Report No. CACR-97-04; Center for Applied Coastal Research: Newark, NJ, USA, 1997; pp. 1–243. [Google Scholar]
- Dawson, A.; Stewart, I. Tsunami deposits in the geological record. Sediment. Geol. 2007, 200, 166–183. [Google Scholar] [CrossRef]
- Tadepalli, S.; Synolakis, C. The run-up of N-waves on sloping beaches. Proc. R. Soc. A Math. Phys. Eng. Sci. 1994, 445, 99–112. [Google Scholar] [CrossRef]
- Løvholt, F.; Kaiser, G.; Glimsdal, S.; Scheele, L.; Harbitz, C.; Pedersen, G. Modeling propagation and inundation of the 11 March 2011 Tōhoku tsunami. Nat. Hazards Earth Syst. Sci. 2012, 12, 1017–1028. [Google Scholar] [CrossRef]
- Tang, L.; Titov, V.; Bernard, E.; Wei, Y.; Chamberlin, C.; Newman, J.; Mofjeld, H.; Arcas, D.; Eble, M.; Moore, C.; et al. Direct energy estimation of the 2011 Japan tsunami using deep-ocean pressure measurements. J. Geophys. Res. 2012, 117, 1–28. [Google Scholar] [CrossRef]
- Yamazaki, Y.; Cheung, K.F.; Lay, T. Modeling of the 2011 Tōhoku near-field tsunami from finite-fault inversion of seismic waves. Bull. Seismol. Soc. Am. 2013, 103, 1444–1455. [Google Scholar] [CrossRef]
- Yamazaki, Y.; Cheung, K.F.; Lay, T. A self-consistent fault slip model for the 2011 Tohoku earthquake and tsunami. J. Geophys. Res. Solid Earth 2018, 123, 1435–1458. [Google Scholar] [CrossRef]
- Sugawara, D. Numerical modeling of tsunami: Advances and future challenges after the 2011 Tōhoku earthquake and tsunami. Earth Sci. Rev. 2021, 214, 103498. [Google Scholar] [CrossRef]
- Imakiire, T.; Koarai, M. Wide-area land subsidence caused by “the 2011 off the Pacific coast of Tōhoku earthquake”. Soils Found. 2012, 52, 842–855. [Google Scholar] [CrossRef]
- Röbke, B.; Oost, A.; Bungenstock, F.; Fischer, P.; Grasmeijer, B.; Hadler, H.; Obrocki, L.; Pagels, J.; Willershäuser, T.; Vött, A. Dyke failures in the Province of Groningen (Netherlands) associated with the 1717 Christmas flood: A reconstruction based on geoscientific field data and numerical simulations. Neth. J. Geosci. 2020, 99, 1–13. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Delft3D-FLOW | D-FLOW Flexible Mesh | SFINCS | |
|---|---|---|---|
| Computational time per domain | Overall: 25 min | All-in-one domain: 20 min Total: 20 min | Overall: 1 min 19 s |
| Nest: 15 min | Nest: 1 s | ||
| Total: 40 min | Total: 1 min 20 s | ||
| Number of grid cells/mesh nodes | Overall 472,888 | All-in-one domain: 1,195,114 Total: 1,195,114 | Overall: 9,452,582 |
| Nest: 400,000 | Nest: 168,966 | ||
| Total: 872,888 | Total: 9,621,548 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Röbke, B.R.; Leijnse, T.; Winter, G.; van Ormondt, M.; van Nieuwkoop, J.; de Graaff, R. Rapid Assessment of Tsunami Offshore Propagation and Inundation with D-FLOW Flexible Mesh and SFINCS for the 2011 Tōhoku Tsunami in Japan. J. Mar. Sci. Eng. 2021, 9, 453. https://doi.org/10.3390/jmse9050453
Röbke BR, Leijnse T, Winter G, van Ormondt M, van Nieuwkoop J, de Graaff R. Rapid Assessment of Tsunami Offshore Propagation and Inundation with D-FLOW Flexible Mesh and SFINCS for the 2011 Tōhoku Tsunami in Japan. Journal of Marine Science and Engineering. 2021; 9(5):453. https://doi.org/10.3390/jmse9050453
Chicago/Turabian StyleRöbke, Björn R., Tim Leijnse, Gundula Winter, Maarten van Ormondt, Joana van Nieuwkoop, and Reimer de Graaff. 2021. "Rapid Assessment of Tsunami Offshore Propagation and Inundation with D-FLOW Flexible Mesh and SFINCS for the 2011 Tōhoku Tsunami in Japan" Journal of Marine Science and Engineering 9, no. 5: 453. https://doi.org/10.3390/jmse9050453
APA StyleRöbke, B. R., Leijnse, T., Winter, G., van Ormondt, M., van Nieuwkoop, J., & de Graaff, R. (2021). Rapid Assessment of Tsunami Offshore Propagation and Inundation with D-FLOW Flexible Mesh and SFINCS for the 2011 Tōhoku Tsunami in Japan. Journal of Marine Science and Engineering, 9(5), 453. https://doi.org/10.3390/jmse9050453