
L2-Gain-Based Practical Stabilization of an Underactuated Surface Vessel



Abstract
1. Introduction
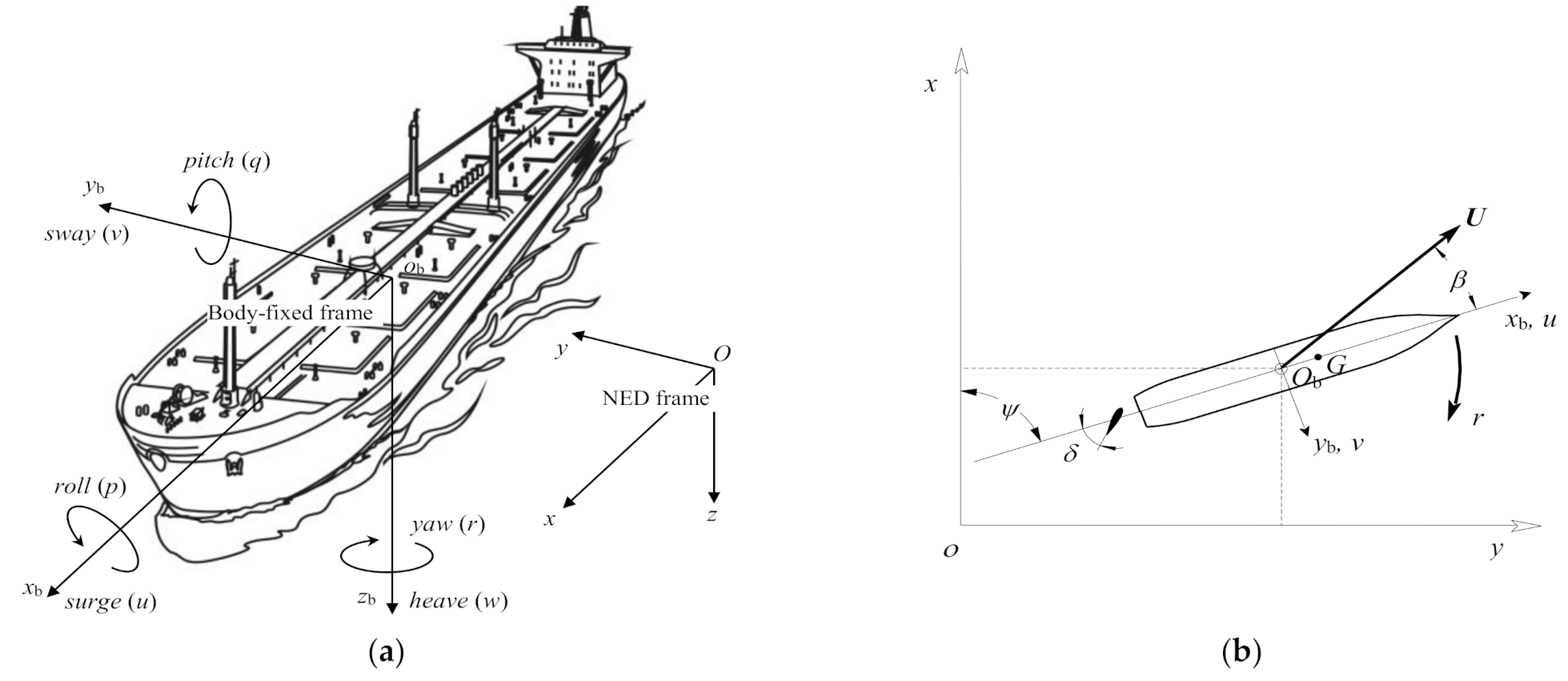
2. Problem Formulations
2.1. Assumptions
2.2. Mathematical Model
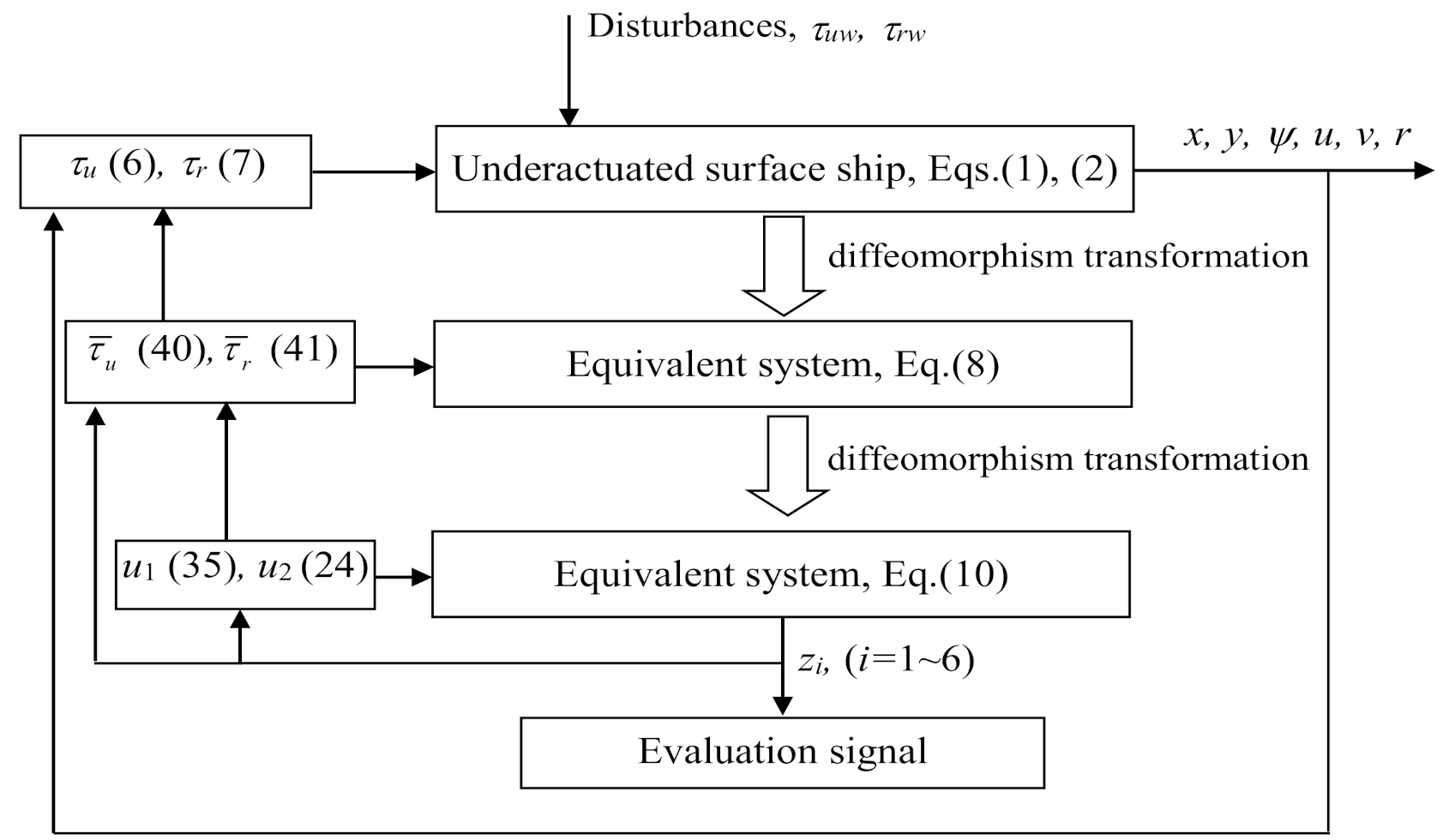
3. Controller Design
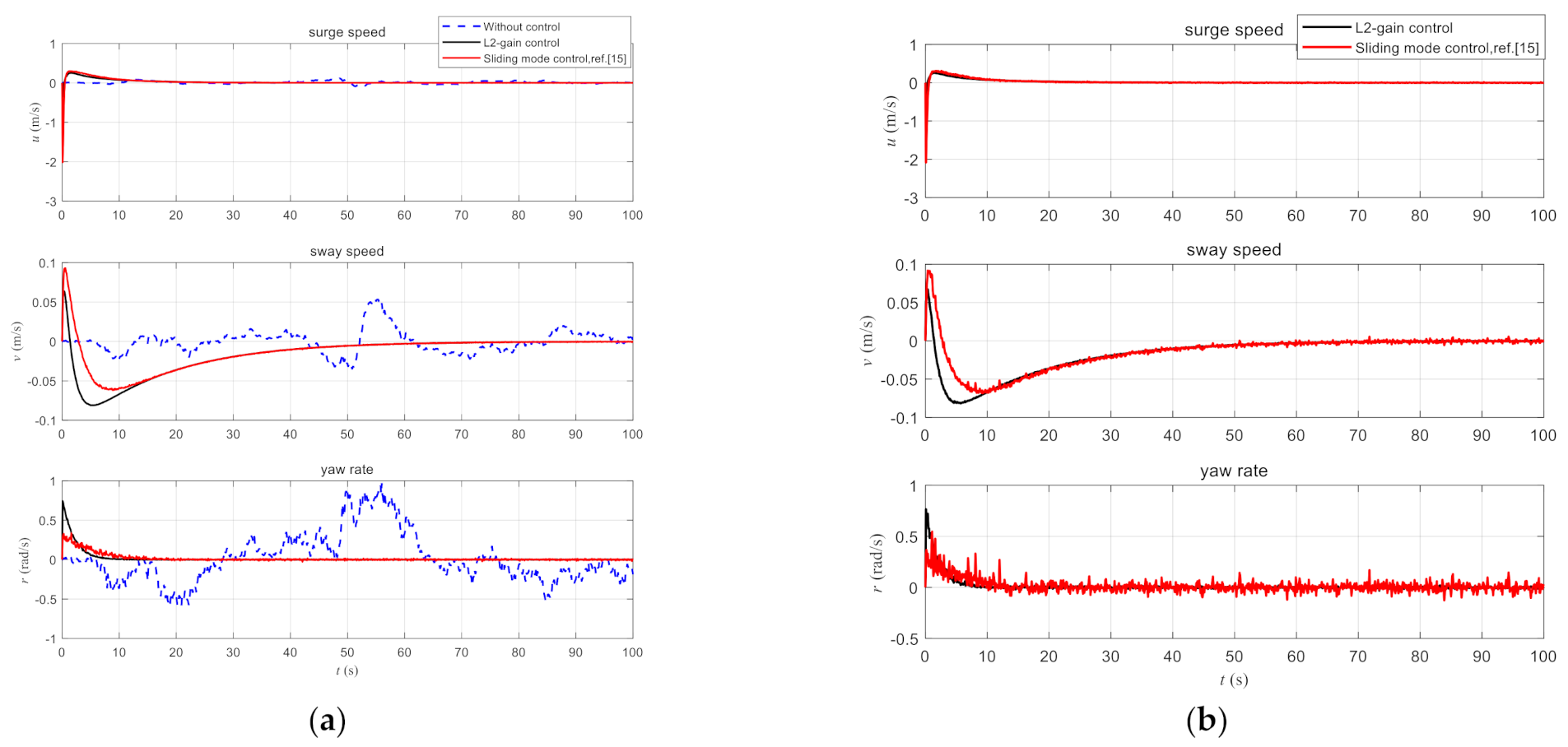
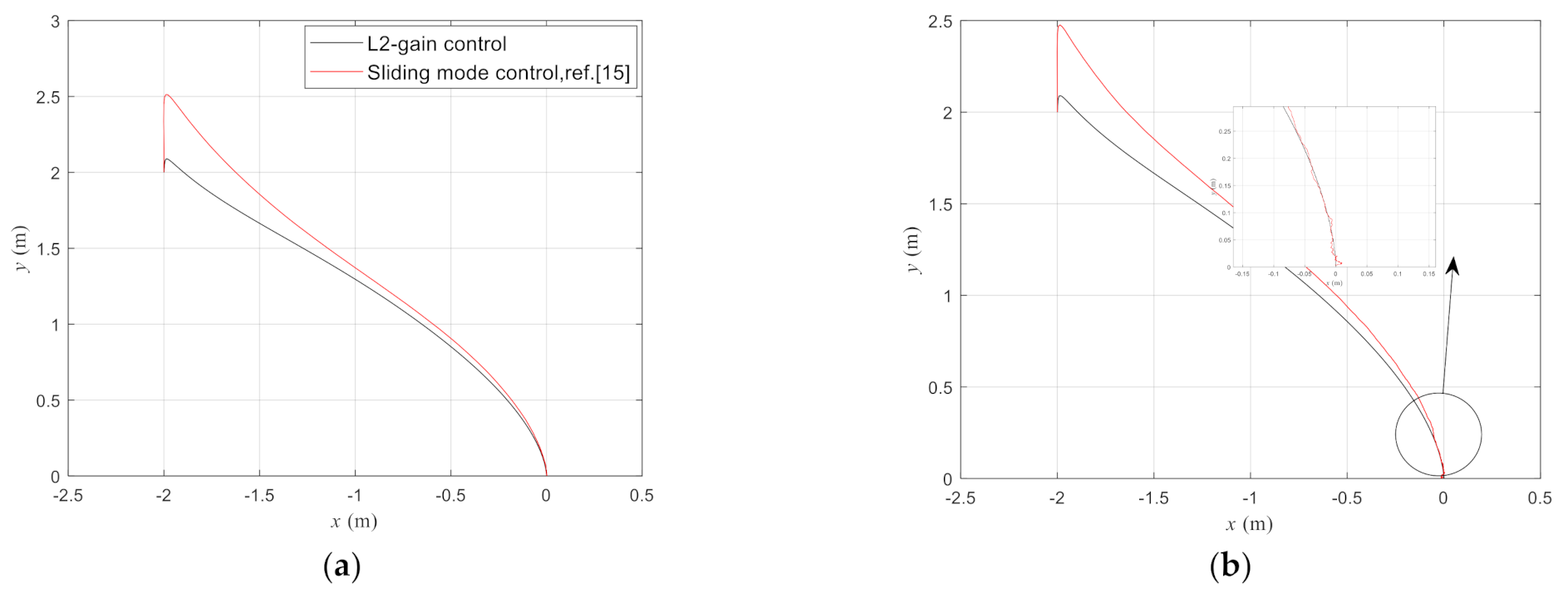
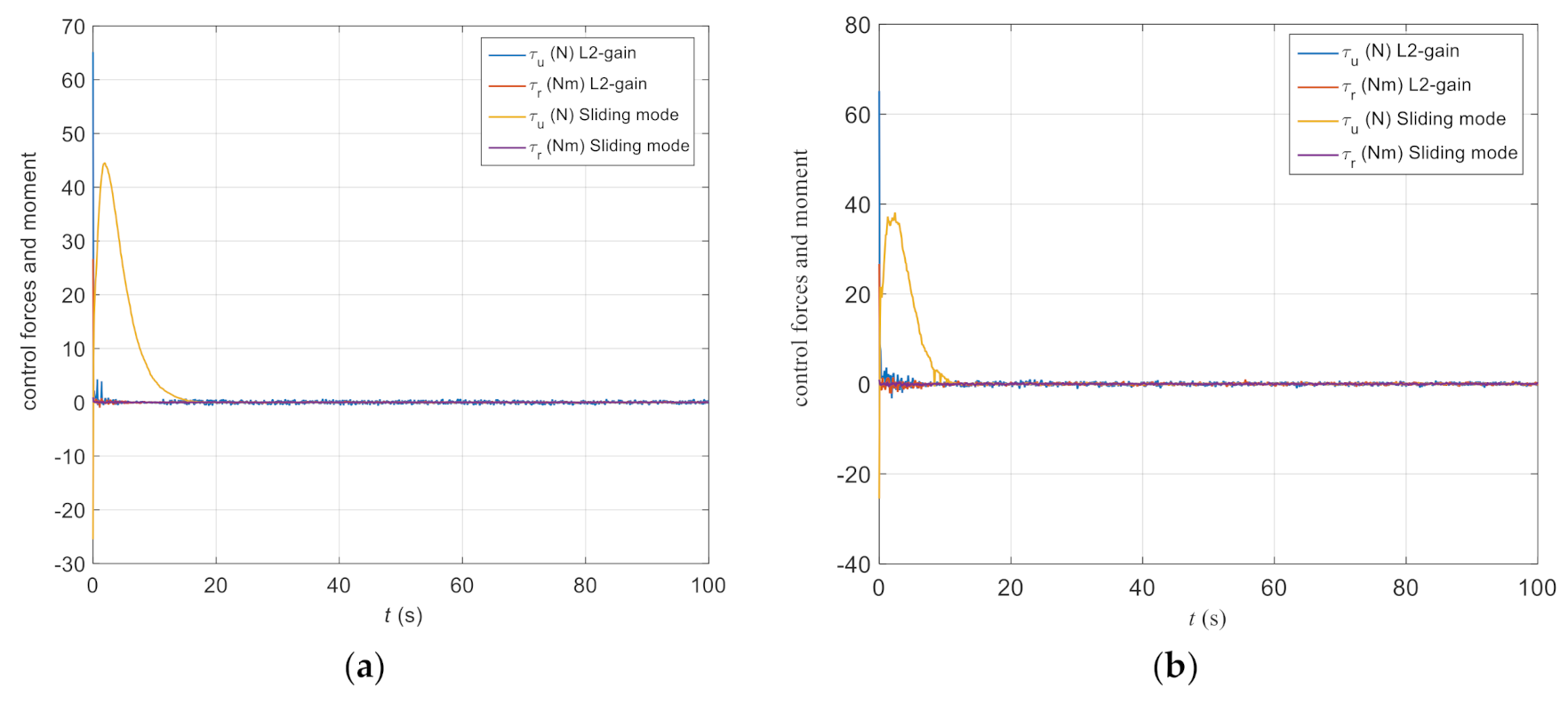
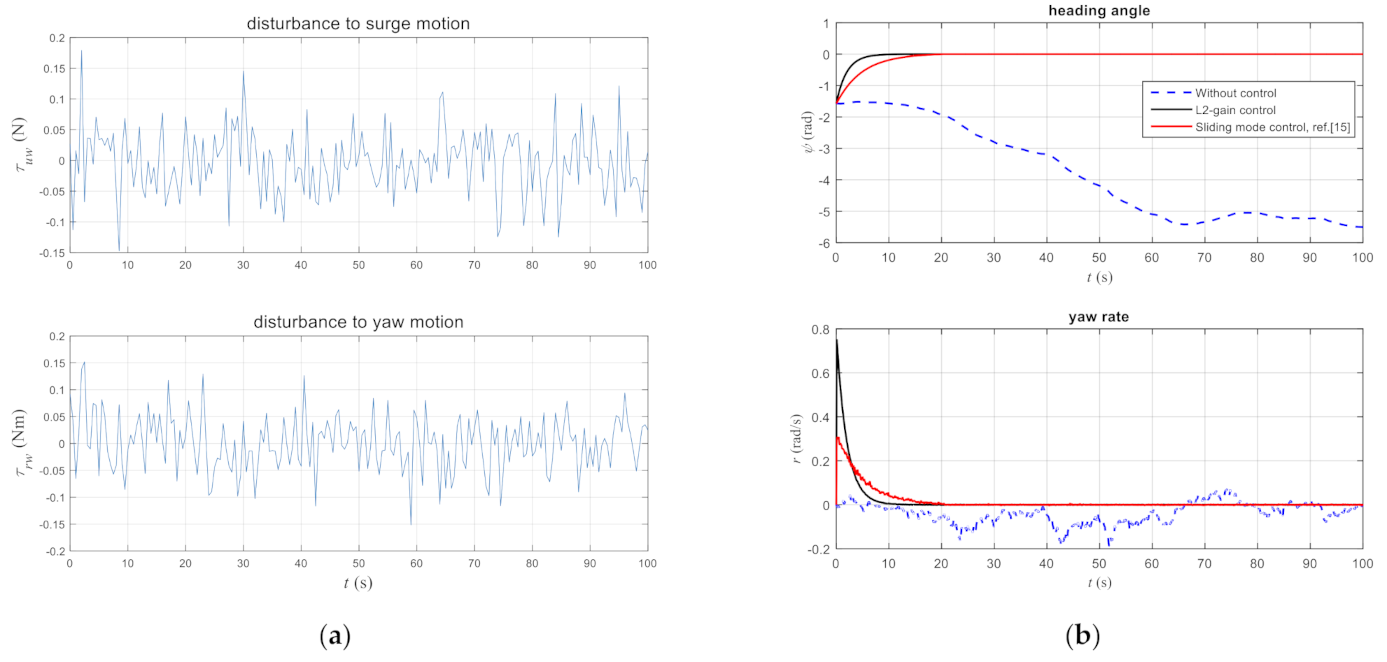
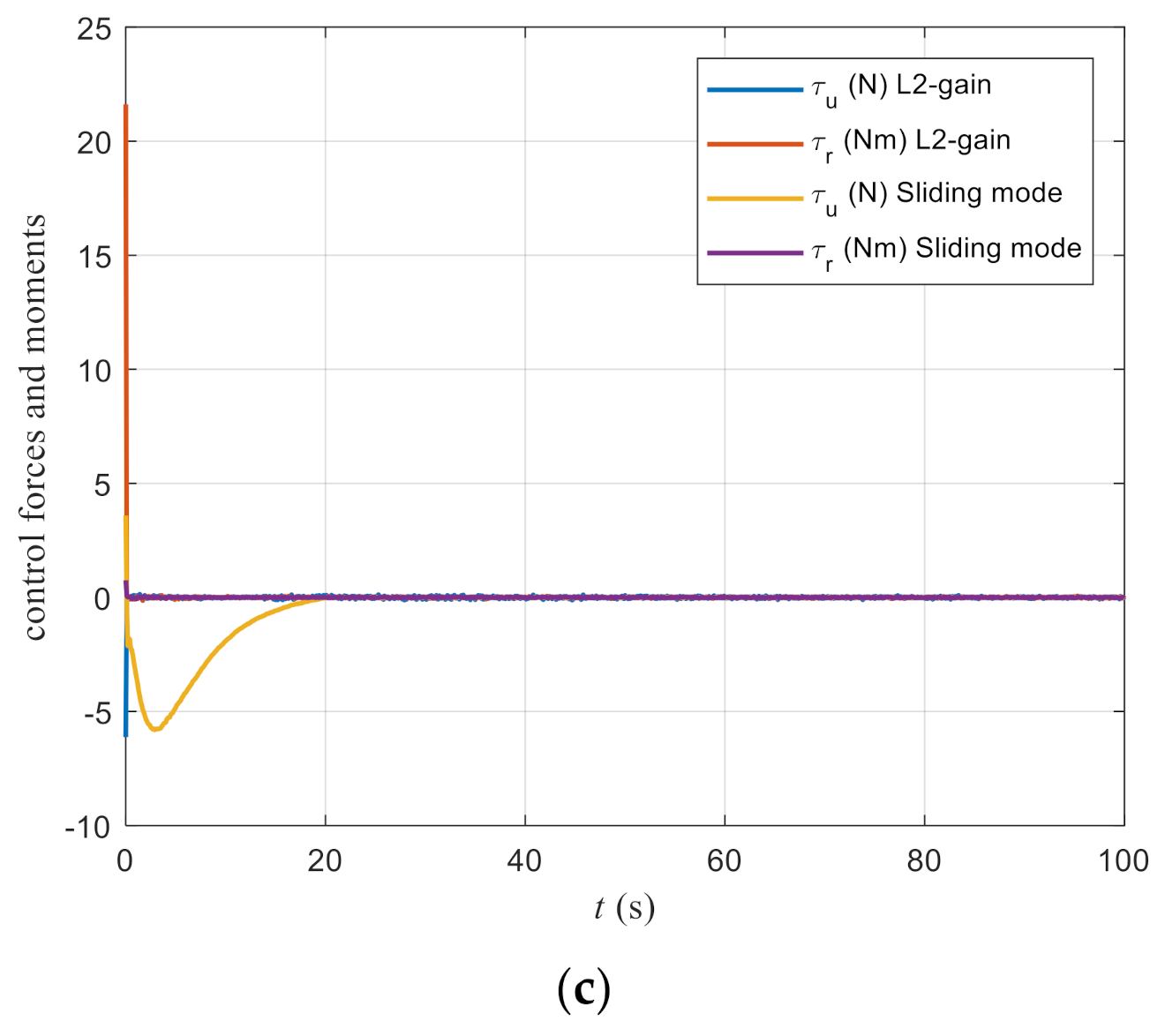
4. Example Study
5. Conclusions
- (1)
- The control scheme proposed in the study could be grouped into the discontinuous feedback approach stated in the introduction since the sign function was included in the controller.
- (2)
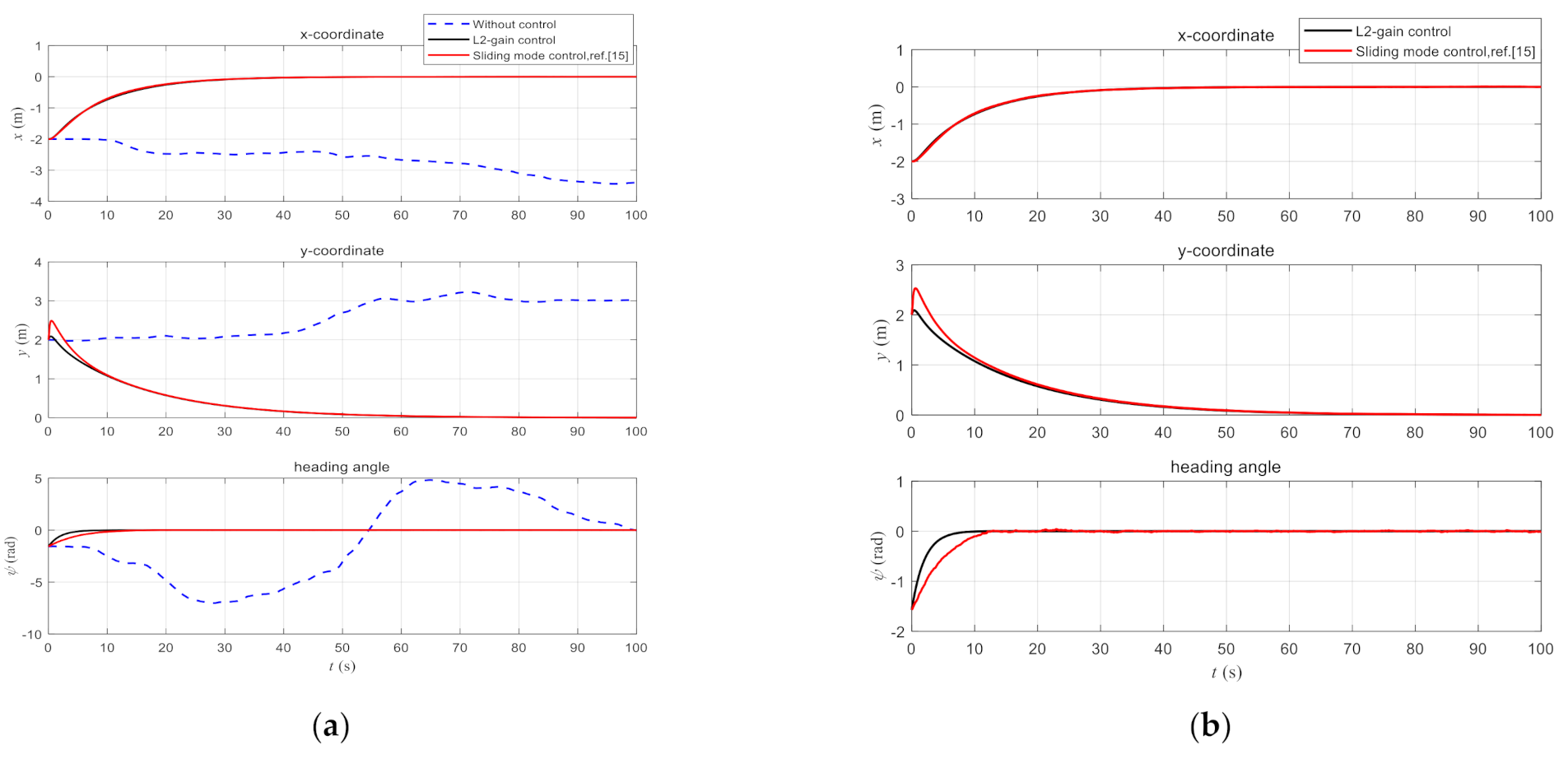
- No asymptotic stability could be achieved but general stability instead. Nevertheless, errors could be made as small as possible by decreasing the L2-gain index γ1, as illustrated in inequality (22).
- (3)
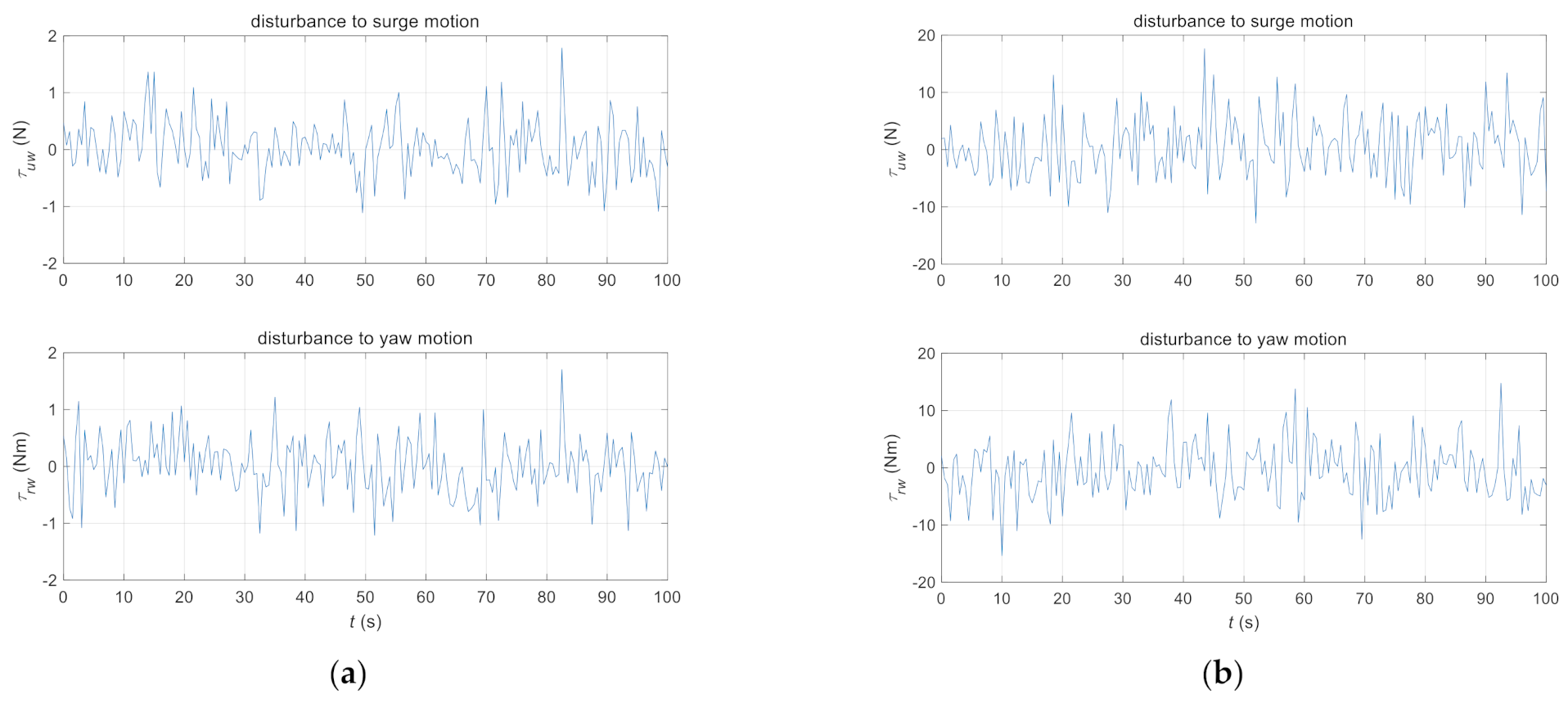
- The disturbances considered in the study were uncertain and nonlinear in a real sense, which is consistent with the essence of environmental disturbances induced by wind, waves, and current. In many studies reported in literature, however, the disturbances were assumed as harmonic signals that could be estimated and compensated accurately in a close loop. There were difficulties with those estimation techniques when dealing with really uncertain signals.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Do, K.D.; Pan, J. Control of Ships and Underwater Vehicles: Design for Underactuated and Nonlinear Marine Systems; Springer Science & Business Media: London, UK, 2009. [Google Scholar]
- Vu, M.T.; Choi, H.S.; Oh, J.Y.; Jeong, S.K. A study on automatic berthing control of an unmanned surface vehicle. J. Adv. Res. Ocean Eng. 2016, 2, 192–201. [Google Scholar] [CrossRef]
- Brockett, R.W. Asymptotic stability and feedback stabilization. Differ. Geom. Control Theory 1983, 27, 181–191. [Google Scholar]
- Pettersen, K.Y.; Egeland, O. Exponential stabilization of an underactuated surface vessel. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 13 December 1996; Volume 1, pp. 967–972. [Google Scholar]
- Reyhanoglu, M. Exponential stabilization of an underactuated autonomous surface vessel. Automatica 1997, 33, 2249–2254. [Google Scholar] [CrossRef]
- Laiou, M.C.; Astolfi, A. Discontinuous control of high-order generalized chained systems. Syst. Control Lett. 1999, 37, 309–322. [Google Scholar] [CrossRef]
- Pettersen, K.Y.; Fossen, T.I. Underactuated dynamic positioning of a ship-experimental results. IEEE Trans. Control. Syst. Technol. 2000, 8, 856–863. [Google Scholar] [CrossRef]
- Ghommam, J.; Mnif, F.; Benali, A.; Derbel, N. Asymptotic backstepping stabilization of an underactuated surface vessel. IEEE Trans. Control Syst. Technol. 2006, 14, 1150–1157. [Google Scholar] [CrossRef]
- Ma, B. Global κ-exponential asymptotic stabilization of underactuated surface vessels. Syst. Control. Lett. 2009, 58, 194–201. [Google Scholar] [CrossRef]
- Ghommam, J.; Mnif, F.; Derbel, N. Global stabilisation and tracking control of underactuated surface vessels. IET Control Theory Appl. 2010, 4, 71–88. [Google Scholar] [CrossRef]
- Mazenc, F.; Pettersen, K.Y.; Nijmeijer, H. Global uniform asymptotic stabilization of an underactuated surface vessel. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; Volume 1, pp. 510–515. [Google Scholar]
- Tian, Y.P.; Li, S. Exponential stabilization of nonholonomic dynamic systems by smooth time-varying control. Automatica 2002, 38, 1139–1146. [Google Scholar] [CrossRef]
- Dong, W.; Guo, Y. Global time-varying stabilization of underactuated surface vessel. IEEE Trans. Autom. Control 2005, 50, 859–864. [Google Scholar] [CrossRef]
- Pettersen, K.Y.; Nijmeijer, H. Semi-global practical stabilization and disturbance adaptation for an underactuated ship. In Proceedings of the 39th IEEE Conference on Decision and Control (Cat. No. 00CH37187), Sydney, Australia, 12–15 December 2002; Volume 3, pp. 2144–2149. [Google Scholar]
- Do, K.D. Practical control of underactuated ships. Ocean Eng. 2010, 37, 1111–1119. [Google Scholar] [CrossRef]
- Ding, F.; Wu, J.; Wang, Y. Stabilization of an underactuated surface vessel based on adaptive sliding mode and backstepping control. Math. Probl. Eng. 2013, 2013, 324954. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Y. Further results on global stabilisation and tracking control for underactuated surface vessels with non-diagonal inertia and damping matrices. Int. J. Control 2015, 88, 1679–1692. [Google Scholar] [CrossRef]
- Dai, S.L.; He, S.; Xu, Y. Transverse function approach to practical stabilisation of underactuated surface vessels with modelling uncertainties and unknown disturbances. IET Control Theory Appl. 2017, 11, 2573–2584. [Google Scholar] [CrossRef]
- Lin, X.; Nie, J.; Jiao, Y.; Liang, K.; Li, H. Adaptive fuzzy output feedback stabilization control for the underactuated surface vessel. Appl. Ocean Res. 2018, 74, 40–48. [Google Scholar] [CrossRef]
- Hinostroza, M.A.; Luo, W.; Soares, C.G. Robust fin control for ship roll stabilization based on L2-gain design. Ocean Eng. 2015, 94, 126–131. [Google Scholar] [CrossRef]
- Songtao, Z.; Peng, Z. L2-Gain Based Adaptive Robust Heel/Roll Reduction Control Using Fin Stabilizer during Ship Turns. J. Mar. Sci. Eng. 2021, 9, 89. [Google Scholar] [CrossRef]
- Luo, W.; Cong, H. Control for ship course-keeping using optimized support vector machines. Algorithms 2016, 9, 52. [Google Scholar] [CrossRef]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.-T.; Lee, S.-D.; Choi, H.-S. Study on Dynamic Behavior of Unmanned Surface Vehicle-Linked Unmanned Underwater Vehicle System for Underwater Exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef] [PubMed]
- Yu, R.T.; Zhu, Q.D.; Liu, Z.L.; Wang, Y. Decoupling implementation of global K-exponential stabilization of underactuated non-symmetric surface vessel. Control Decis. 2012, 27, 781–786. [Google Scholar]
- Ishii, C.; Shen, T.; Qu, Z. Lyapunov recursive design of robust adaptive tracking control with L2-gain performance for electrically-driven robot manipulators. Int. J. Control 2001, 74, 811–828. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Chichester, UK, 1994; p. 331. [Google Scholar]
- Fossen, T.I. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002; p. 447. [Google Scholar]
- Zwierzewicz, Z. Robust and adaptive path-following control of an underactuated Ship. IEEE Access 2020, 8, 120198–120204. [Google Scholar] [CrossRef]
- Tomera, M. Dynamic positioning system design for “Blue Lady”. Simulation tests. Pol. Marit. Res. 2012, 19, 57–65. [Google Scholar] [CrossRef][Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Overall length | 76.2 m |
| Breadth | 18.8 m |
| Depth | 8.25 m |
| Draft | 6.25 m |
| Mass | 4200 t |
| Engine power | 3533 kW |
| Item | Value |
|---|---|
| Overall length | 13.78 m |
| Breadth | 2.38 m |
| Draft | 0.86 m |
| Displacement | 22.83 m3 |
| Maximum speed | 3.1 knot |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, W.; Qi, X. L2-Gain-Based Practical Stabilization of an Underactuated Surface Vessel. J. Mar. Sci. Eng. 2021, 9, 341. https://doi.org/10.3390/jmse9030341
Luo W, Qi X. L2-Gain-Based Practical Stabilization of an Underactuated Surface Vessel. Journal of Marine Science and Engineering. 2021; 9(3):341. https://doi.org/10.3390/jmse9030341
Chicago/Turabian StyleLuo, Weilin, and Xin Qi. 2021. "L2-Gain-Based Practical Stabilization of an Underactuated Surface Vessel" Journal of Marine Science and Engineering 9, no. 3: 341. https://doi.org/10.3390/jmse9030341
APA StyleLuo, W., & Qi, X. (2021). L2-Gain-Based Practical Stabilization of an Underactuated Surface Vessel. Journal of Marine Science and Engineering, 9(3), 341. https://doi.org/10.3390/jmse9030341