
RANS Prediction of Wave-Induced Ship Motions, and Steady Wave Forces and Moments in Regular Waves


Abstract
:1. Introduction
2. Numerical Method
2.1. Governing Equations and Numeric Discretization
2.2. The Expression of Steady Wave Force and Moment
2.3. Grid and Boundary Conditions
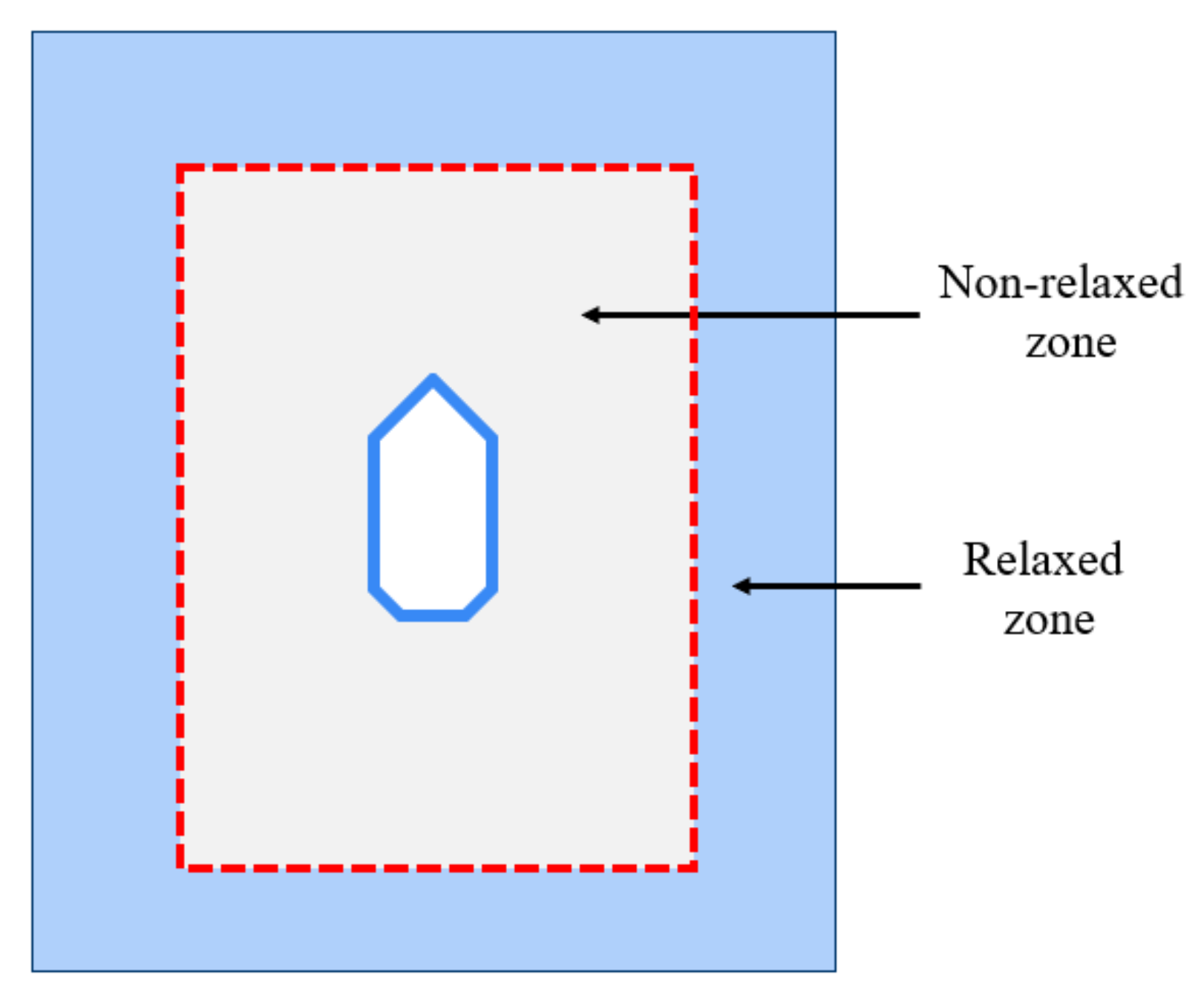
2.4. Wave Absorbing
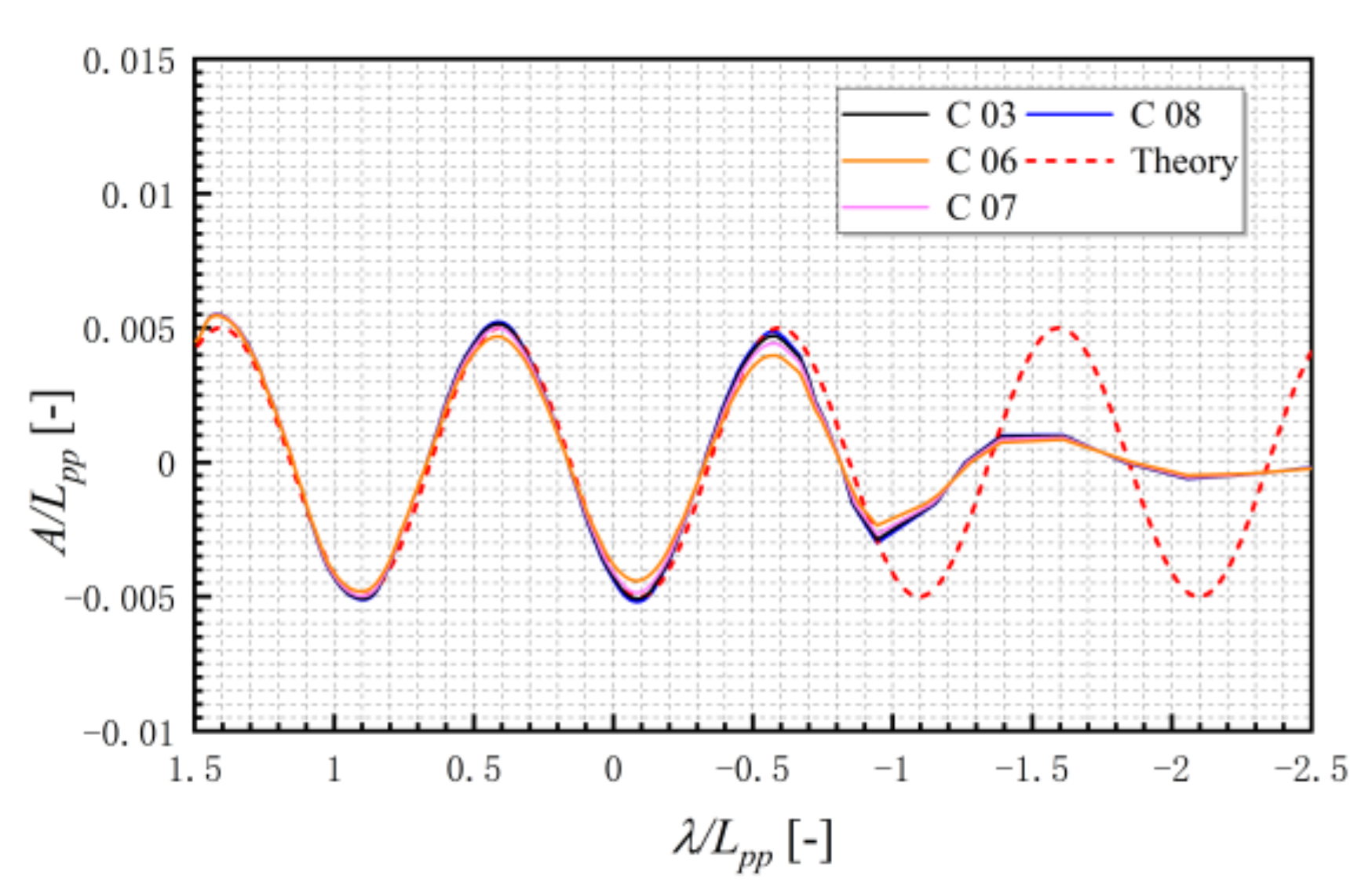
2.5. Check of Wave Quality
3. Results and Analysis
3.1. Ship Model and Computational Cases
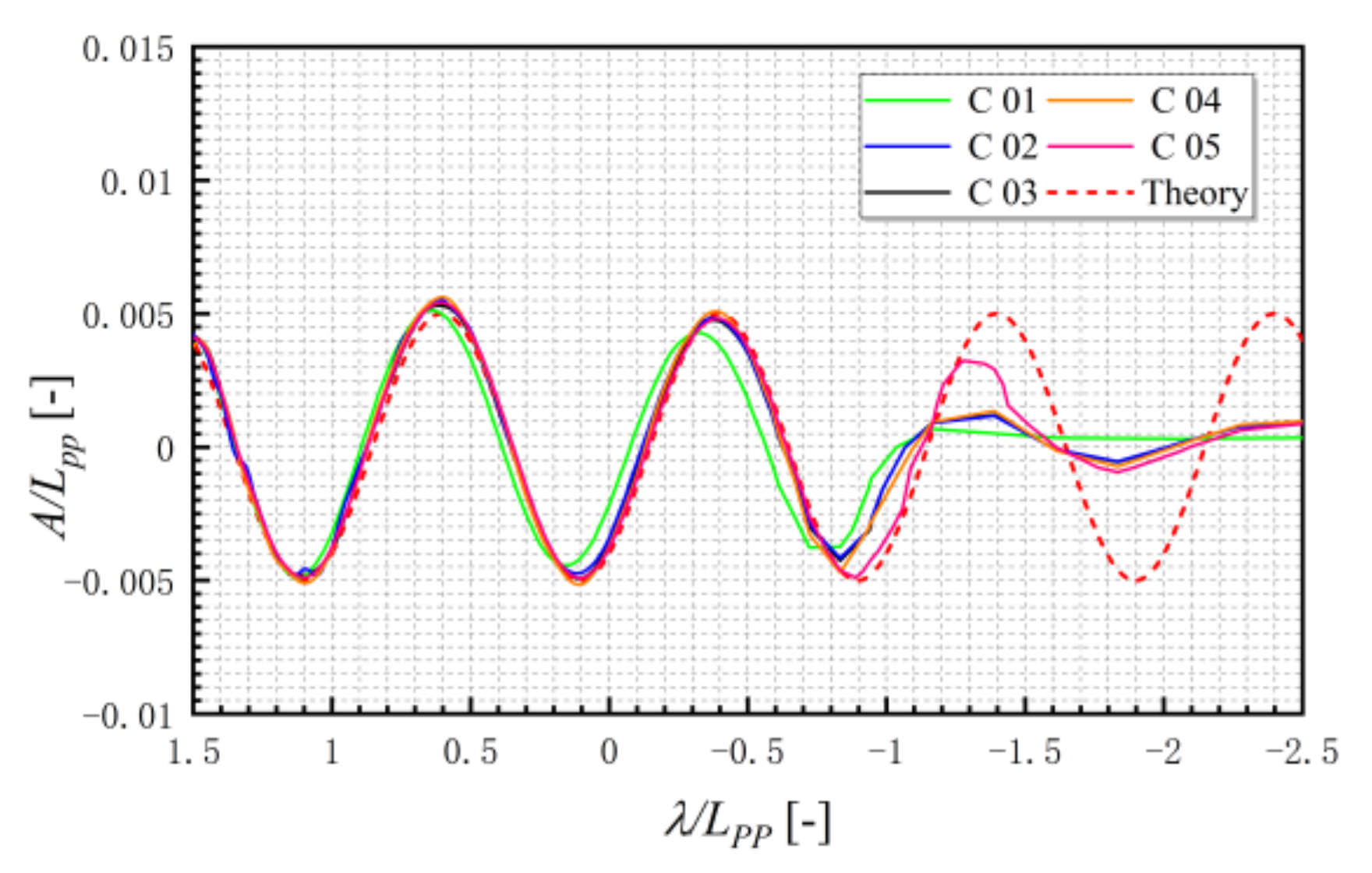
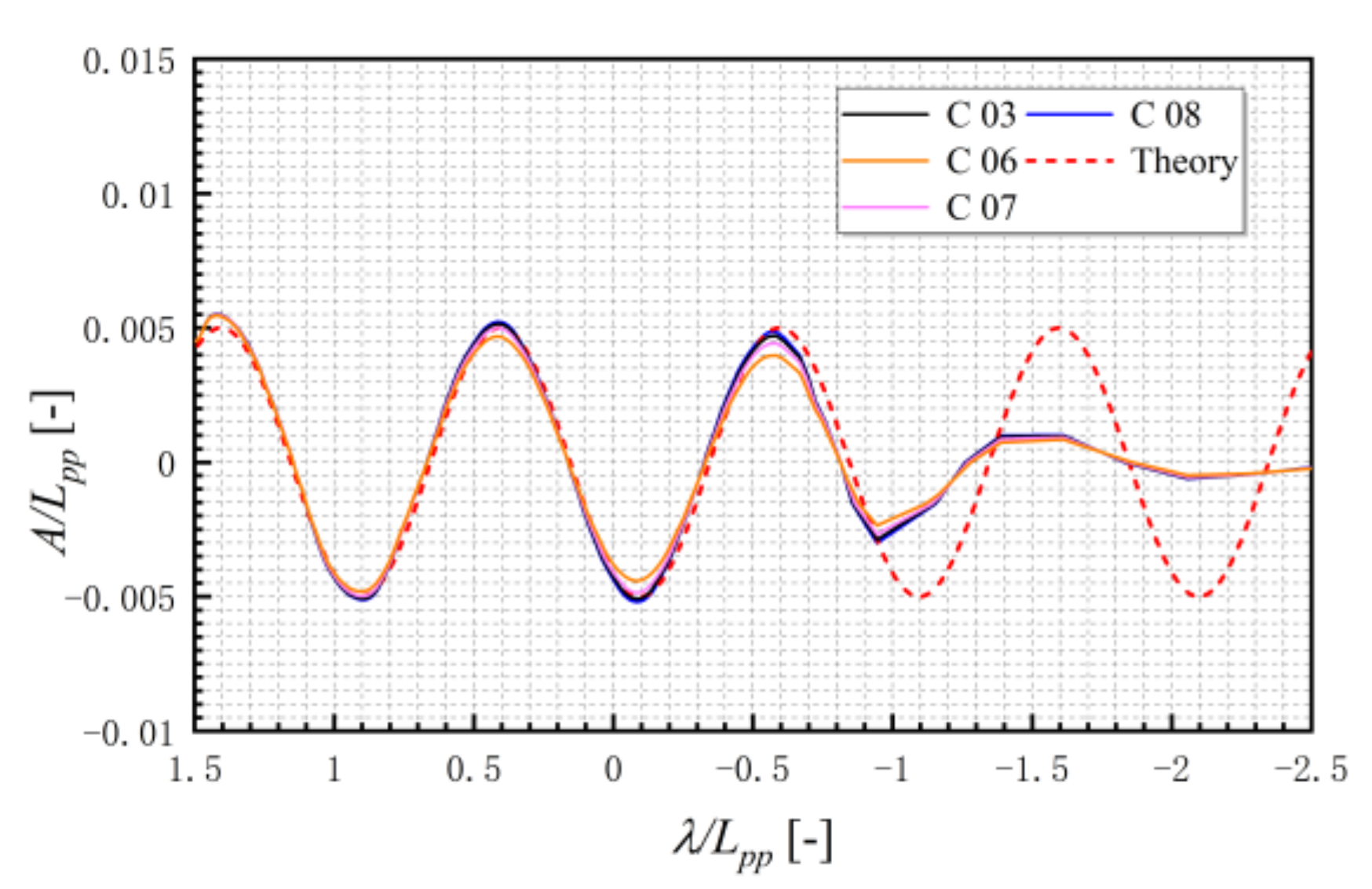
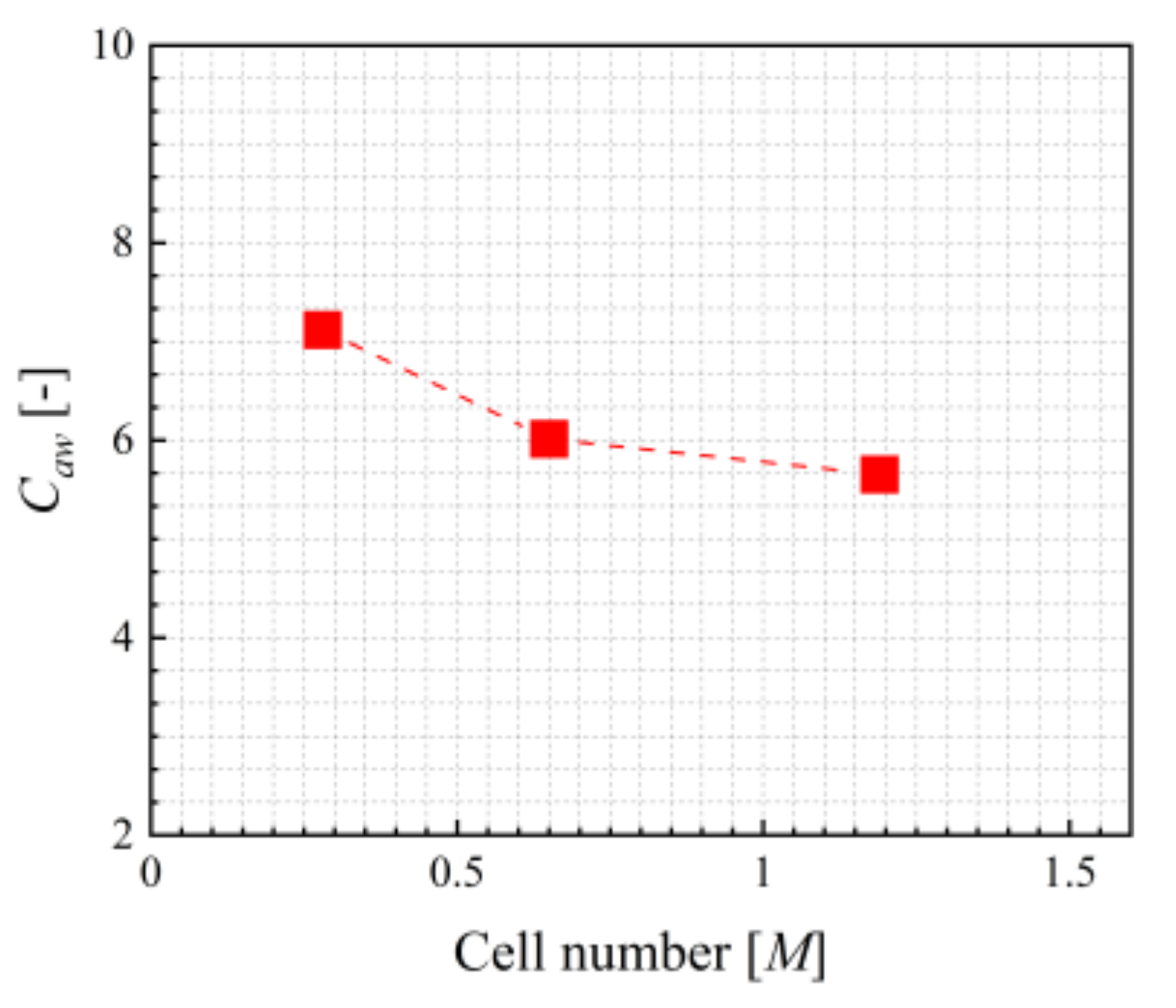
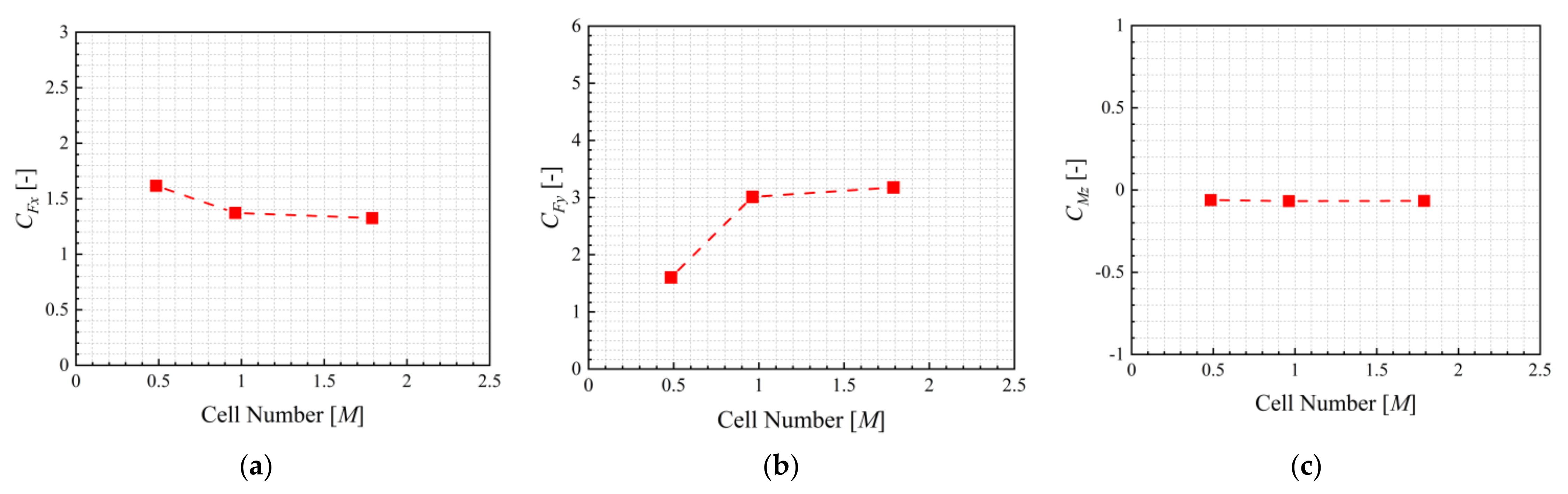
3.2. Grid Dependency Analysis
3.3. Results and Analysis
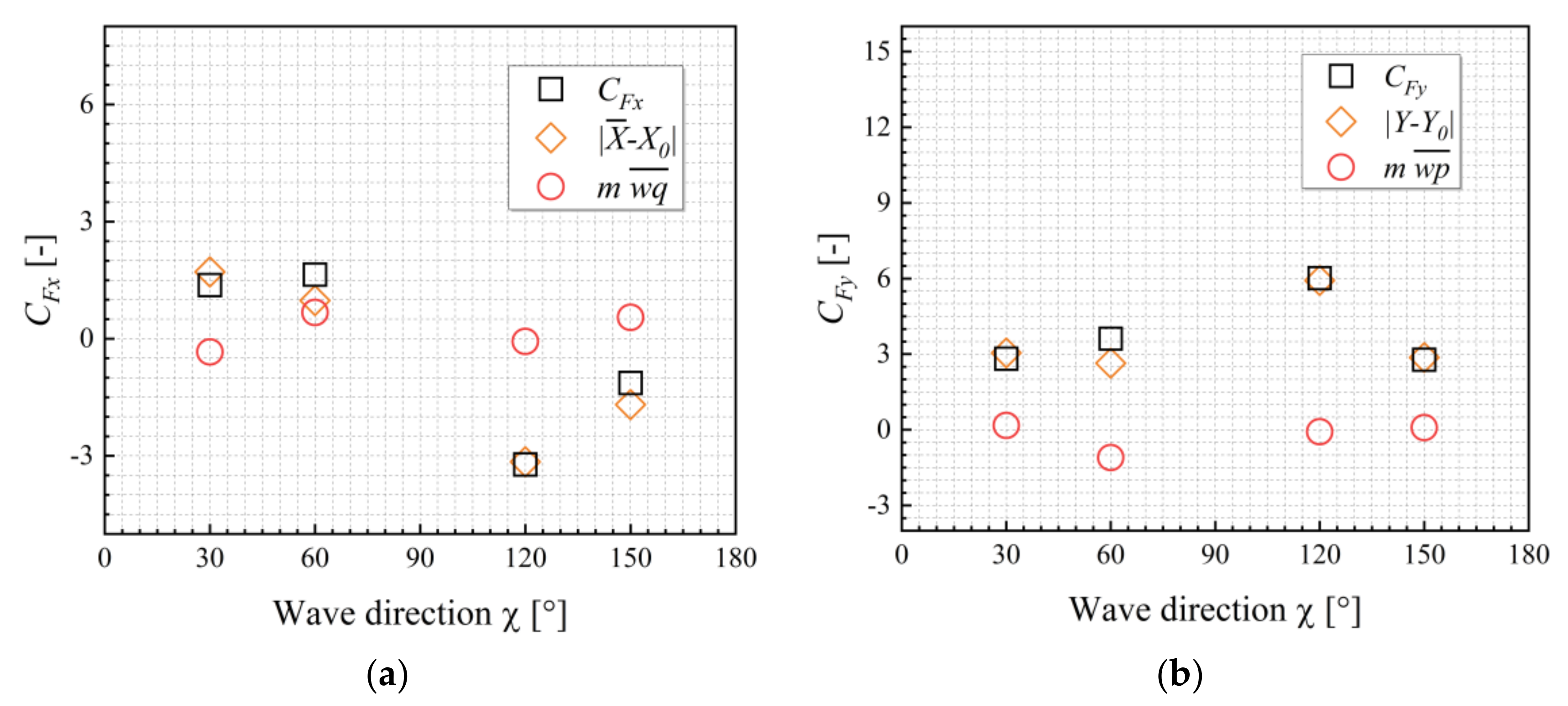
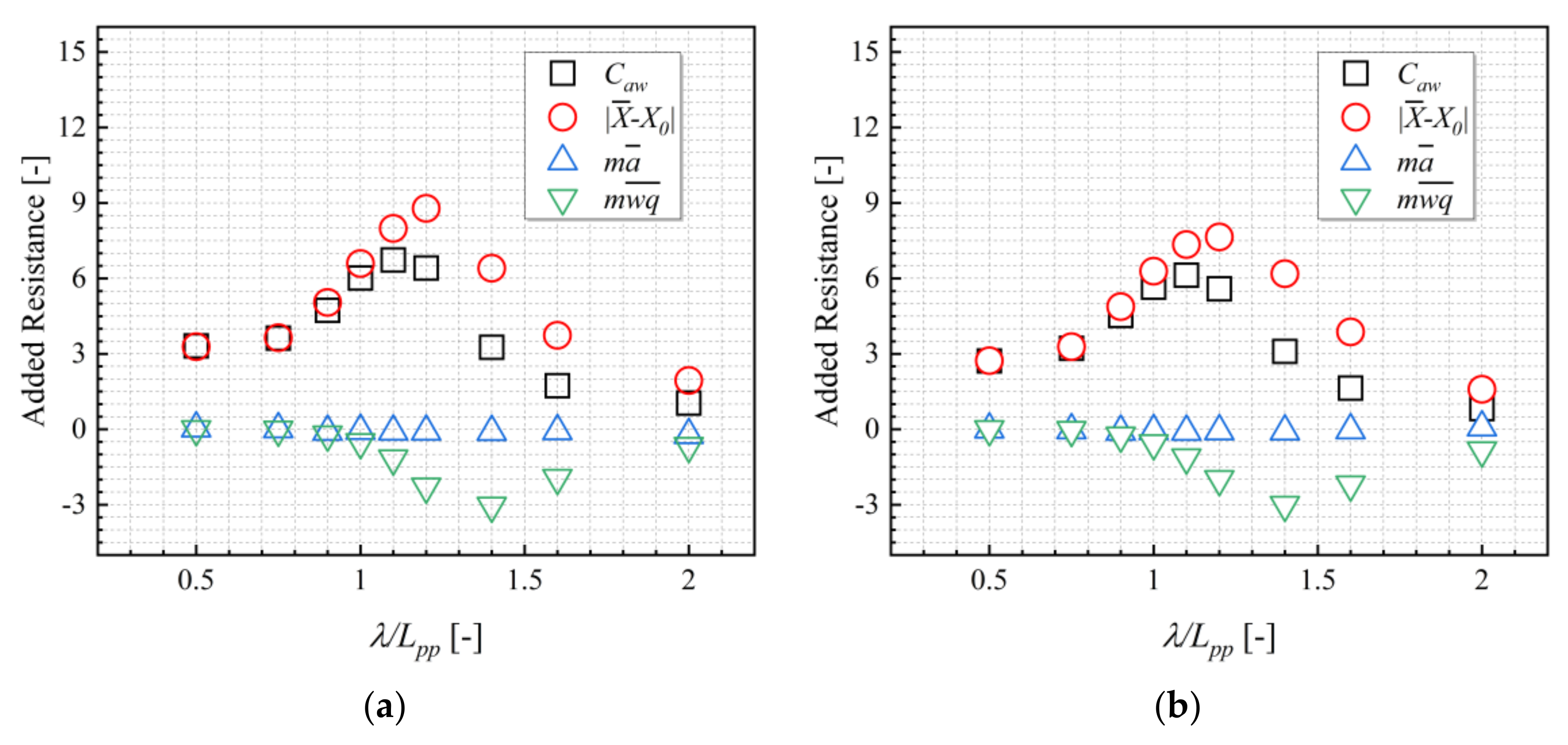
3.3.1. Component Analysis
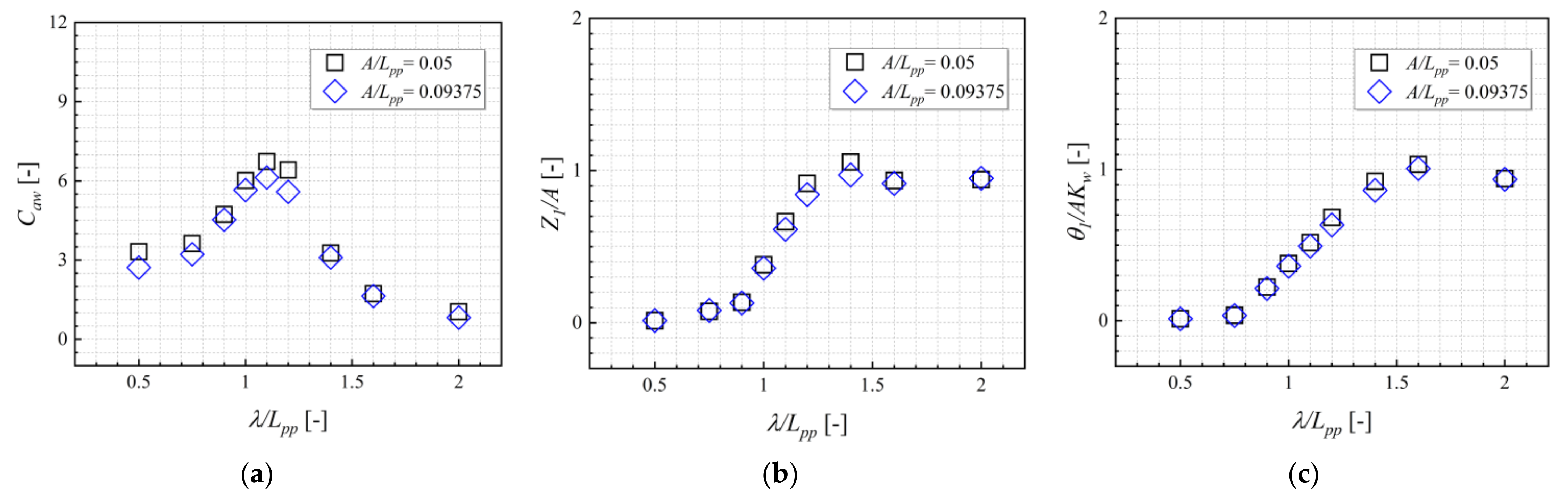
3.3.2. Effect of Wave Amplitude on Added Resistance
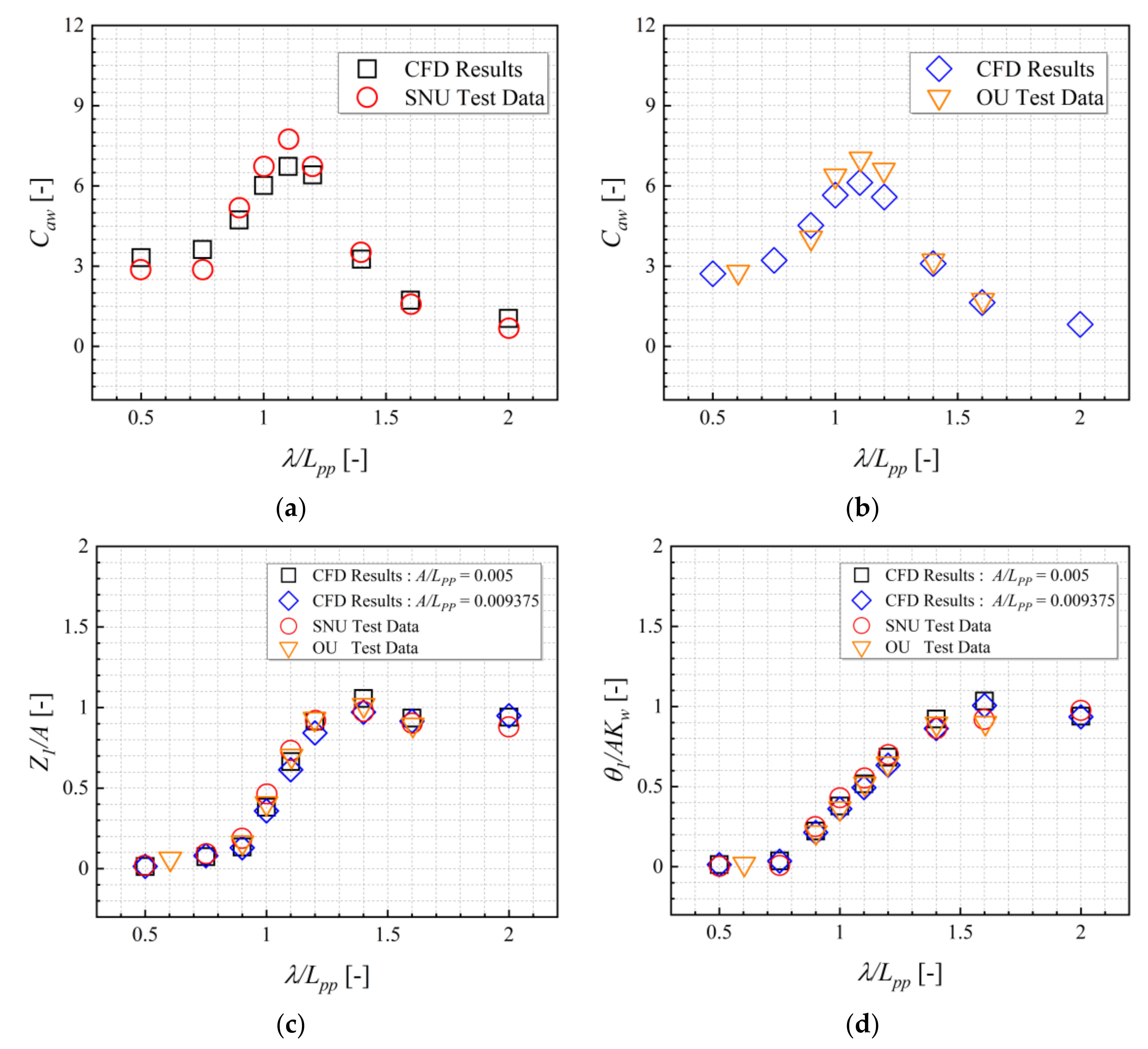
3.3.3. Validation of RANS Results
4. Conclusions
- (1)
- The computed added resistance, as well as the steady wave sway force and yaw moment with inertia effects due to the wave-induced motions agrees well with the available experimental data. This confirms the contributions of the inertia effects. The inertia forces cannot be neglected if wave-induced motions are of large amplitudes.
- (2)
- The comparison of the computed resistances using two wave amplitudes indicates that added resistance is not proportional to the square of wave amplitude.
- (3)
- General good agreements between the computed results and the experimental data are observed. This shows that the RANS solver can be used as a tool for ship seakeeping analysis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Maritime Organization. Interim Guidelines for the Calculation of the Coefficient fw for Decrease in Ship Speed in a Representative Sea Condition for Trial Use; IMO: London, UK, 2012. [Google Scholar]
- Specialist Committee on Seakeeping. Final Report and Recommendations to the 27th ITTC. In Proceedings of the the 27th International Towing Tank Conference, Copenhagen, Denmark, 31 August–5 September 2014. [Google Scholar]
- International Maritime Organization. Interim Guidelines for Determining Minimum Propulsion Power to Maintain the Maneuverability in Adverse Conditions; IMO: London, UK, 2013. [Google Scholar]
- Sadat-Hosseini, H.; Wu, P.-C.; Carrica, P.M.; Kim, H.; Toda, Y.; Stern, F. CFD verification and validation of added resistance and motions of KVLCC2 with fixed and free surge in short and long head waves. Ocean Eng. 2013, 59, 240–273. [Google Scholar] [CrossRef]
- Lee, J.; Park, D.-M.; Kim, Y. Experimental investigation on the added resistance of modified KVLCC2 hull forms with different bow shapes. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2017, 231, 395–410. [Google Scholar] [CrossRef]
- Shigunov, V.; Moctar, O.E.; Papanikolaou, A.; Potthoff, R.; Liu, S. International benchmark study on numerical simulation methods for prediction of manoeuvrability of ships in waves. Ocean Eng. 2018, 165, 365–385. [Google Scholar] [CrossRef]
- Havelock, T.H. The resistance of a ship among waves. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1937, 161, 299–308. [Google Scholar]
- Salvesen, N. Second-order steady state forces and moments on surface ships in oblique regular waves. In Proceedings of the International Symposium on the Dynamics of Marine Vehicles and Structures in Waves; Naval Ship Research and Development Center: Washington, DC, USA, 1974. [Google Scholar]
- Faltinsen, O.M.; Minsaas, K.J.; Liapis, N.; Skjørdal, S.O. Prediction of resistance and propulsion of a ship in a seaway. In Proceedings of the 13th Symposium on Naval Hydrodynamics, Tokyo, Japan, 6–8 October 1980; pp. 505–529. [Google Scholar]
- Kim, K.H.; Kim, Y. Numerical study on added resistance of ships by using a time-domain Rankine panel method. Ocean Eng. 2011, 38, 1357–1367. [Google Scholar] [CrossRef]
- Maruo, H. The drift of a body floating on waves. J. Ship Res. 1960, 4, 1–10. [Google Scholar]
- Joosen, W. Added resistance of ships in waves. In Proceedings of the 6th Symposium on Naval Hydrodynamics; National Academy Press: Washington, DC, USA, 1966. [Google Scholar]
- Newman, J.N. The drift force and moment on ships in waves. J. Ship Res. 1967, 11, 51–60. [Google Scholar] [CrossRef]
- Gerritsma, J.; Beukelman, W. Analysis of the resistance increase in waves of a fast cargo ship. Int. Shipbuild. Progress 1972, 19, 285–293. [Google Scholar] [CrossRef]
- Chizhiumov, S.D. Numerical Modeling of Ship Motion in Heavy Sea Conditions. In Proceedings of the Sixth ISOPE Pacific/Asia Offshore Mechanics Symposium, Vladivostok, Russia, 12–16 September 2004. [Google Scholar]
- Kim, B.Y.; Seo, M.G.; Park, D.M.; Yang, K.K. Numerical and Experimental Analyses of Added Resistance in Waves. In Proceedings of the 29th International Workshop on Water Waves and Floating Bodies, Osaka, Japan, 30 March–2 April 2014. [Google Scholar]
- Park, D.-M.; Kim, Y.; Seo, M.-G.; Lee, J. Study on added resistance of a tanker in head waves at different drafts. Ocean Eng. 2016, 111, 569–581. [Google Scholar] [CrossRef] [Green Version]
- Yasukawa, H.; Matsumoto, A.; Ikezoe, S. Wave Height Effect on Added Resistance of Full Hull Ships in Waves. J. Jpn. Soc. Nav. Archit. Ocean Eng. 2016, 23, 45–54. [Google Scholar]
- Lee, J.-H.; Kim, Y. Study on added resistance of a ship under parametric roll motion. Ocean Eng. 2017, 144, 1–13. [Google Scholar] [CrossRef]
- Yu, J.W.; Lee, C.M.; Choi, J.E.; Lee, I. Effect of ship motions on added resistance in regular head waves of KVLCC2. Ocean Eng. 2017, 146, 375–387. [Google Scholar] [CrossRef]
- Guo, B.; Steen, S.; Deng, G. Seakeeping prediction of KVLCC2 in head waves with RANS. Appl. Ocean Res. 2012, 35, 56–67. [Google Scholar] [CrossRef]
- Wu, C.; Yan, D.; Qiu, G.; Ni, Y. CFD Computation of Added Resistance for KVLCC2 Model in Head Short Waves. J. Ship Mech. 2015, 19, 229–236. [Google Scholar]
- Kim, M.; Hizir, O.; Turan, O.; Incecik, A. Estimation of added resistance and ship speed loss in a seaway. Ocean Eng. 2017, 141, 465–476. [Google Scholar] [CrossRef] [Green Version]
- Sigmund, S.; Moctar, O.E. Numerical and experimental investigation of added resistance of different ship types in short and long waves. Ocean Eng. 2018, 147, 51–67. [Google Scholar] [CrossRef]
- Uharek, S.; Cura-Hochbaum, A. The influence of inertial effects on the mean forces and moments on a ship sailing in oblique waves part b: Numerical prediction using a rans code. Ocean Eng. 2018, 165, 264–276. [Google Scholar] [CrossRef]
- Lee, C.M.; Park, S.C.; Yu, J.W.; Choi, J.E.; Lee, I. Effects of diffraction in regular head waves on added resistance and wake using cfd. Int. J. Nav. Arch. Ocean Eng. 2019, 11, 736–749. [Google Scholar] [CrossRef]
- Islam, H.; Guedes Soares, C. Uncertainty analysis in ship resistance prediction using OpenFOAM. Ocean Eng. 2019, 191, 105805. [Google Scholar] [CrossRef]
- Yao, J.; Su, Y.; Song, X.; Liu, Z.; Cheng, X.; Zhan, C. RANS Analysis of the Motions and Added Resistance for KVLCC2 in Head Regular Waves. Appl. Ocean Res. 2020, 105, 102398. [Google Scholar] [CrossRef]
- Islam, H.; Guedes Soares, C.; Liu, J.; Wang, X. Propulsion power prediction for an inland container vessel in open and restricted channel from model and full-scale simulations. Ocean Eng. 2021, 229, 108621. [Google Scholar] [CrossRef]
- Jiao, J.; Huang, S.; Wang, S.; Guedes Soares, C. A CFD–FEA two-way coupling method for predicting ship wave loads and hydroelastic responses. Appl. Ocean Res. 2021, 117, 102919. [Google Scholar] [CrossRef]
- Yao, J.; Cheng, X.; Song, X.; Zhan, C.; Liu, Z. RANS Computation of the Mean Forces and Moments, and Wave-Induced Six Degrees of Freedom Motions for a Ship Moving Obliquely in Regular Head and Beam Waves. J. Mar. Sci. Eng. 2021, 9, 1176. [Google Scholar] [CrossRef]
- Borkowski, P. Numerical Modeling of Wave Disturbances in the Process of Ship Movement Control. Algorithms 2018, 11, 130. [Google Scholar] [CrossRef] [Green Version]
- Jacobsen, N.G.; Fuhrman, D.R.; Fredsone, J. A wave generation toolbox for the open-source CFD library: Openfoam. Int. J. Numer. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Cell Numbers in a Wavelength | Cell Numbers in a Wave Height | Time Step [s] |
|---|---|---|---|
| C01 | 36 | 8 | 0.001 |
| C02 | 72 | 4 | 0.001 |
| C03 | 72 | 8 | 0.001 |
| C04 | 72 | 16 | 0.001 |
| C05 | 144 | 8 | 0.001 |
| C06 | 72 | 8 | 0.004 |
| C07 | 72 | 8 | 0.002 |
| C08 | 72 | 8 | 0.0005 |
| Items | Real Ship |
|---|---|
| Scale | 1 |
| [m] | 320 |
| [m] | 58 |
| [m] | 20.8 |
| [m] | 18.6 |
| [-] | 0.81 |
| Items | EFD | CFD | ||
|---|---|---|---|---|
| SNU | OU | SHOPERA | ||
| Scale | 100 | 100 | 80 | 80, 100 |
| [°] | 0 | 0 | 30~130 | 0~150 |
| 0.142 | 0.142 | 0 | 0, 0.142 | |
| 0.3~2 | 0.6~2 | 0.2~1.2 | 0.5~2 | |
| 0.005 | 0.009375 | 0.007 | 0.005, 0.007, 0.009375 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Q.; Song, L.; Yao, J. RANS Prediction of Wave-Induced Ship Motions, and Steady Wave Forces and Moments in Regular Waves. J. Mar. Sci. Eng. 2021, 9, 1459. https://doi.org/10.3390/jmse9121459
Gao Q, Song L, Yao J. RANS Prediction of Wave-Induced Ship Motions, and Steady Wave Forces and Moments in Regular Waves. Journal of Marine Science and Engineering. 2021; 9(12):1459. https://doi.org/10.3390/jmse9121459
Chicago/Turabian StyleGao, Qingze, Lifei Song, and Jianxi Yao. 2021. "RANS Prediction of Wave-Induced Ship Motions, and Steady Wave Forces and Moments in Regular Waves" Journal of Marine Science and Engineering 9, no. 12: 1459. https://doi.org/10.3390/jmse9121459
APA StyleGao, Q., Song, L., & Yao, J. (2021). RANS Prediction of Wave-Induced Ship Motions, and Steady Wave Forces and Moments in Regular Waves. Journal of Marine Science and Engineering, 9(12), 1459. https://doi.org/10.3390/jmse9121459