
A Review of Methods for Ship Detection with Electro-Optical Images in Marine Environments

 , ,
, ,  ,
, 

Abstract
:1. Introduction
2. Electro-Optical Images in Ship Detection: Spectral Bands and Characteristics
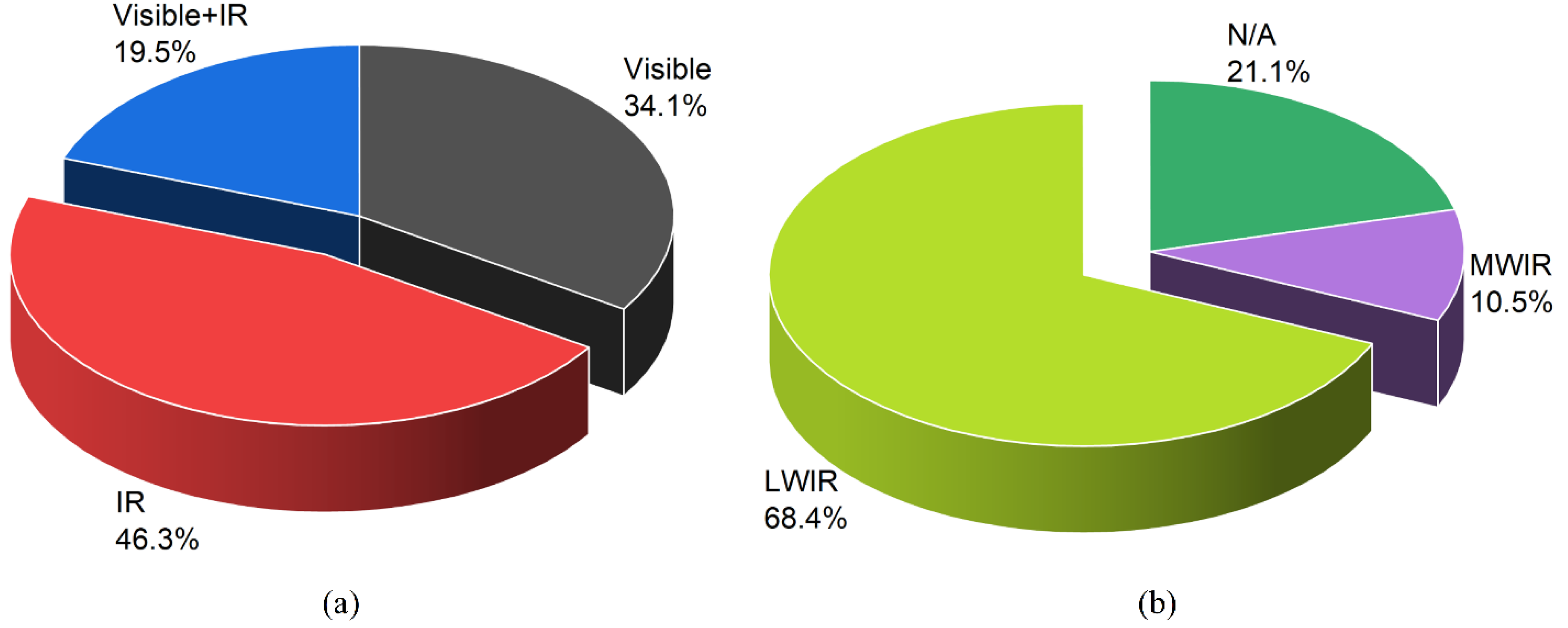
2.1. Image Spectral Bands in Ship Detection
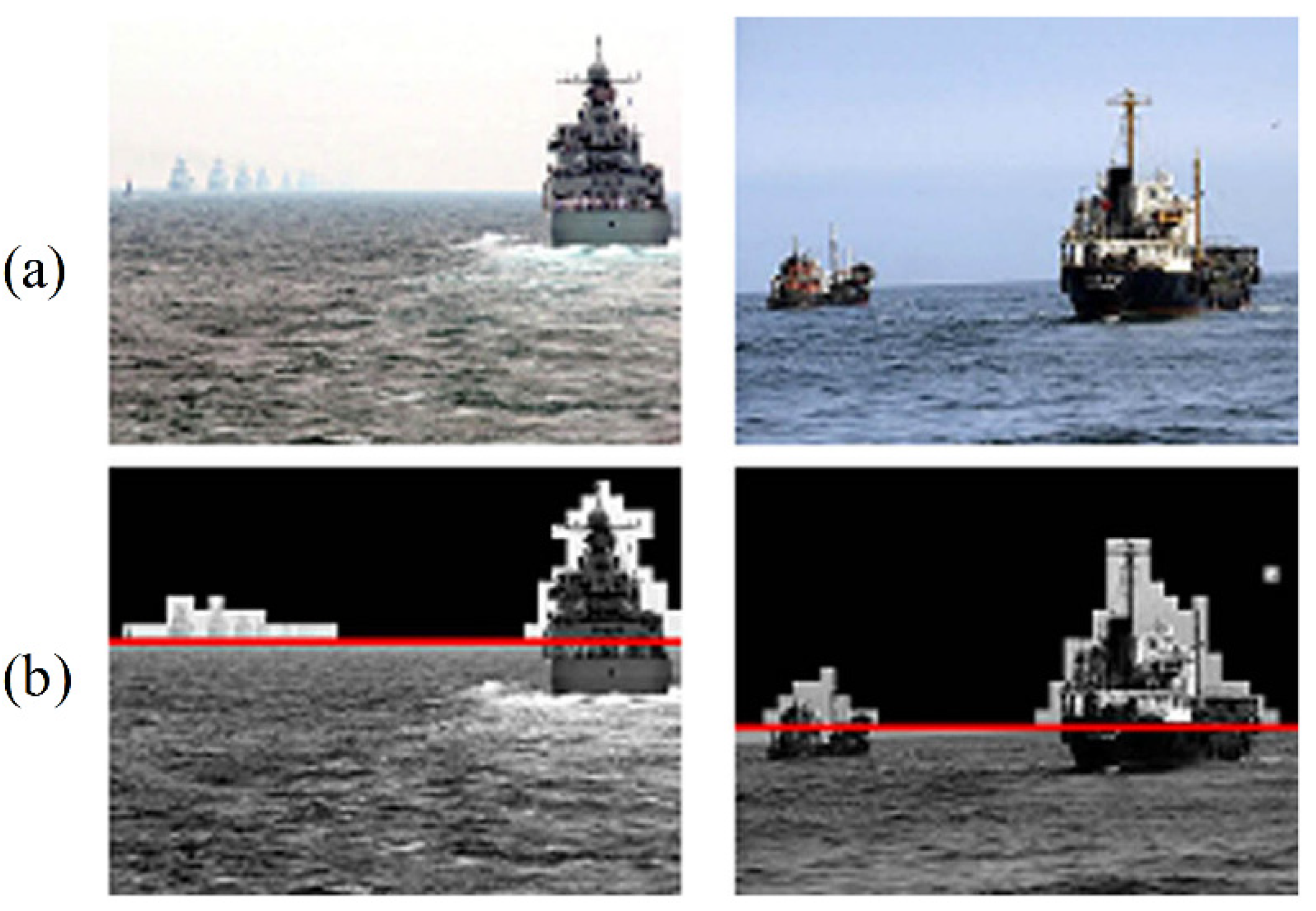
2.2. Image Characteristics with a Sea–Sky Background
3. Ship Detection Methods from Electro-Optical Images
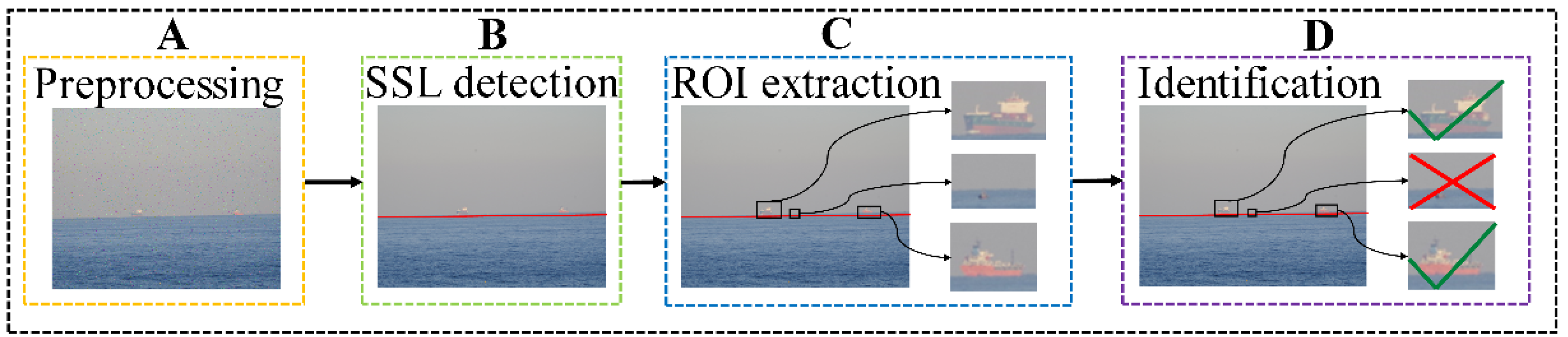
3.1. Traditional Ship Detection Methods
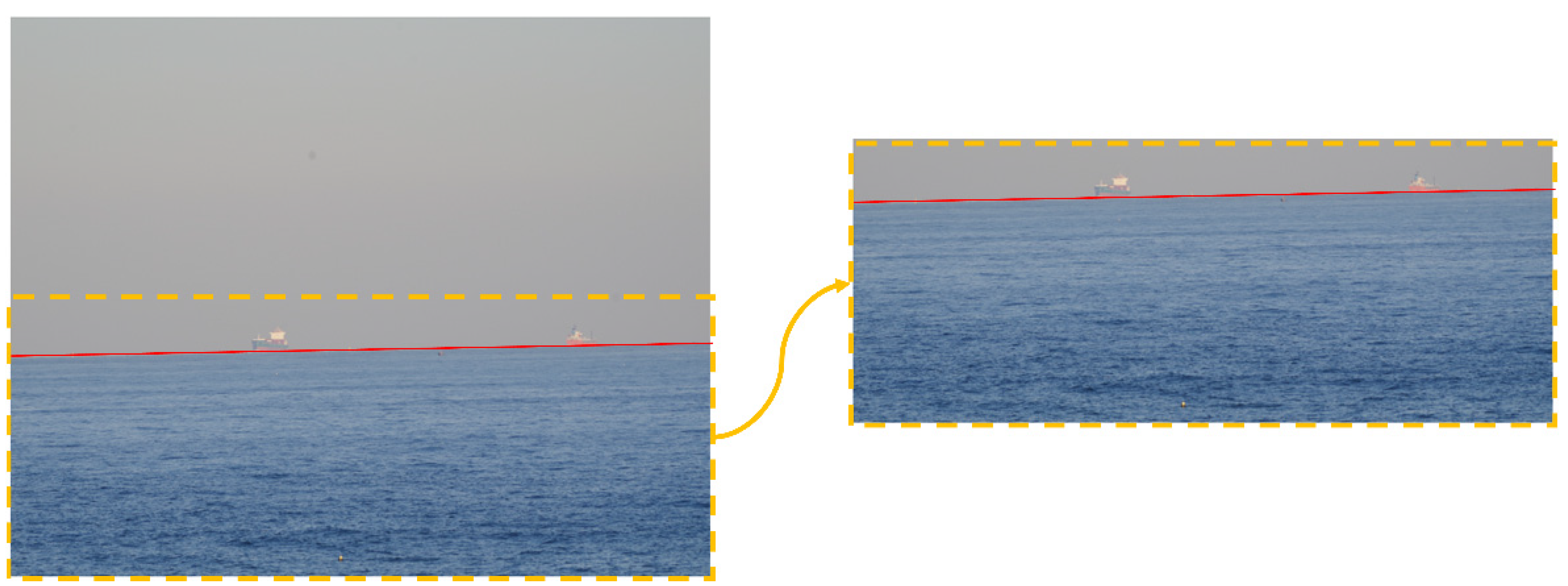
3.1.1. Preprocessing
3.1.2. SSL Detection
Transformation
Region Features
Semantic Segmentation
Summary of SSL Detection Methods
3.1.3. ROI Extraction
SSL-Based
Threshold-Based
Saliency Detection
Frequency Domain
Summary of the ROI Extraction Methods
3.1.4. Identification
Prior Knowledge
Classifier
Summary of Ship Identification
3.2. Ship Detection Based on Deep Learning
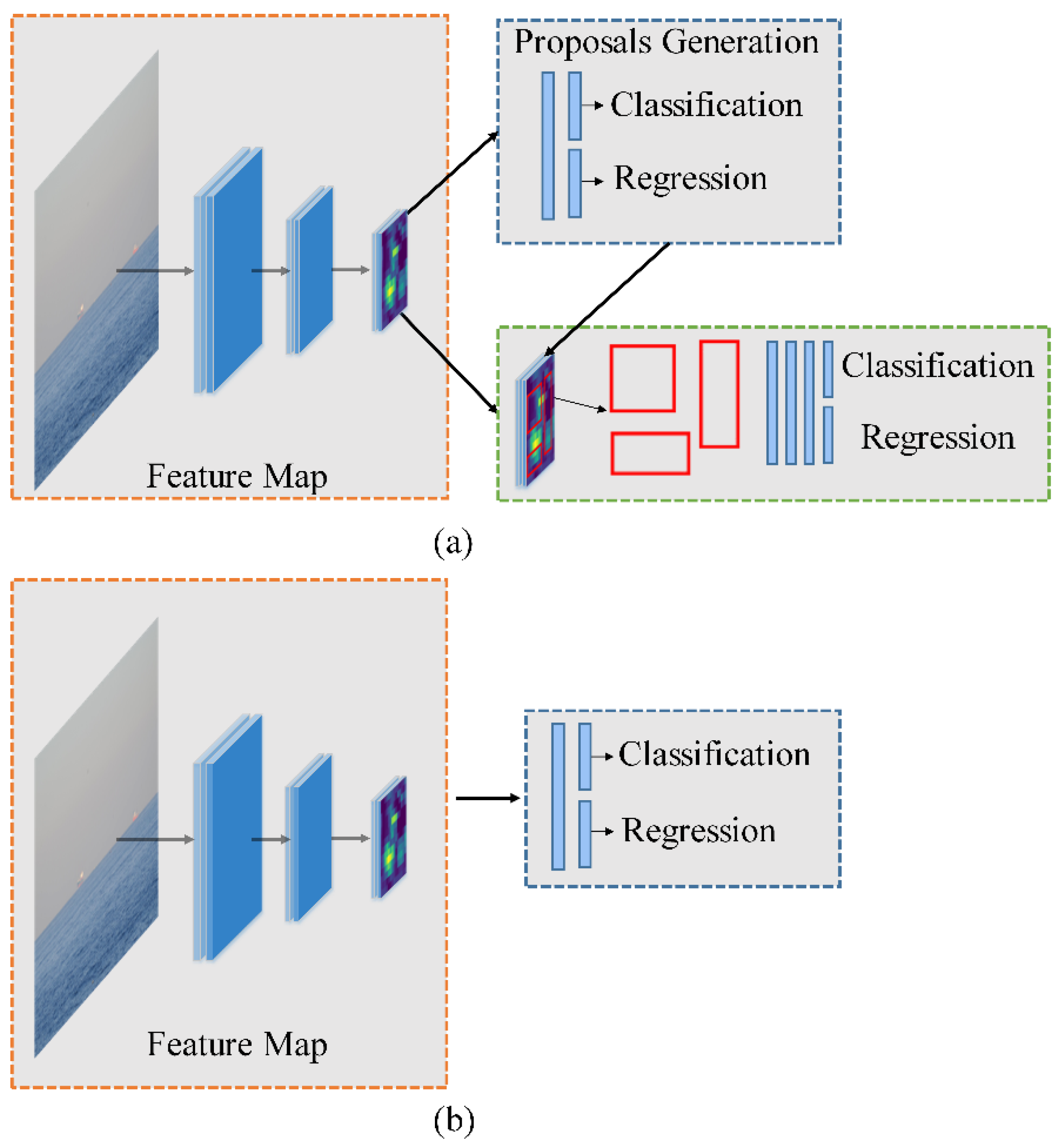
3.2.1. One-Stage and Two-Stage Detectors
3.2.2. Deep Learning in Ship Detection
One-Stage and Two-Stage Detectors in Ship Detection
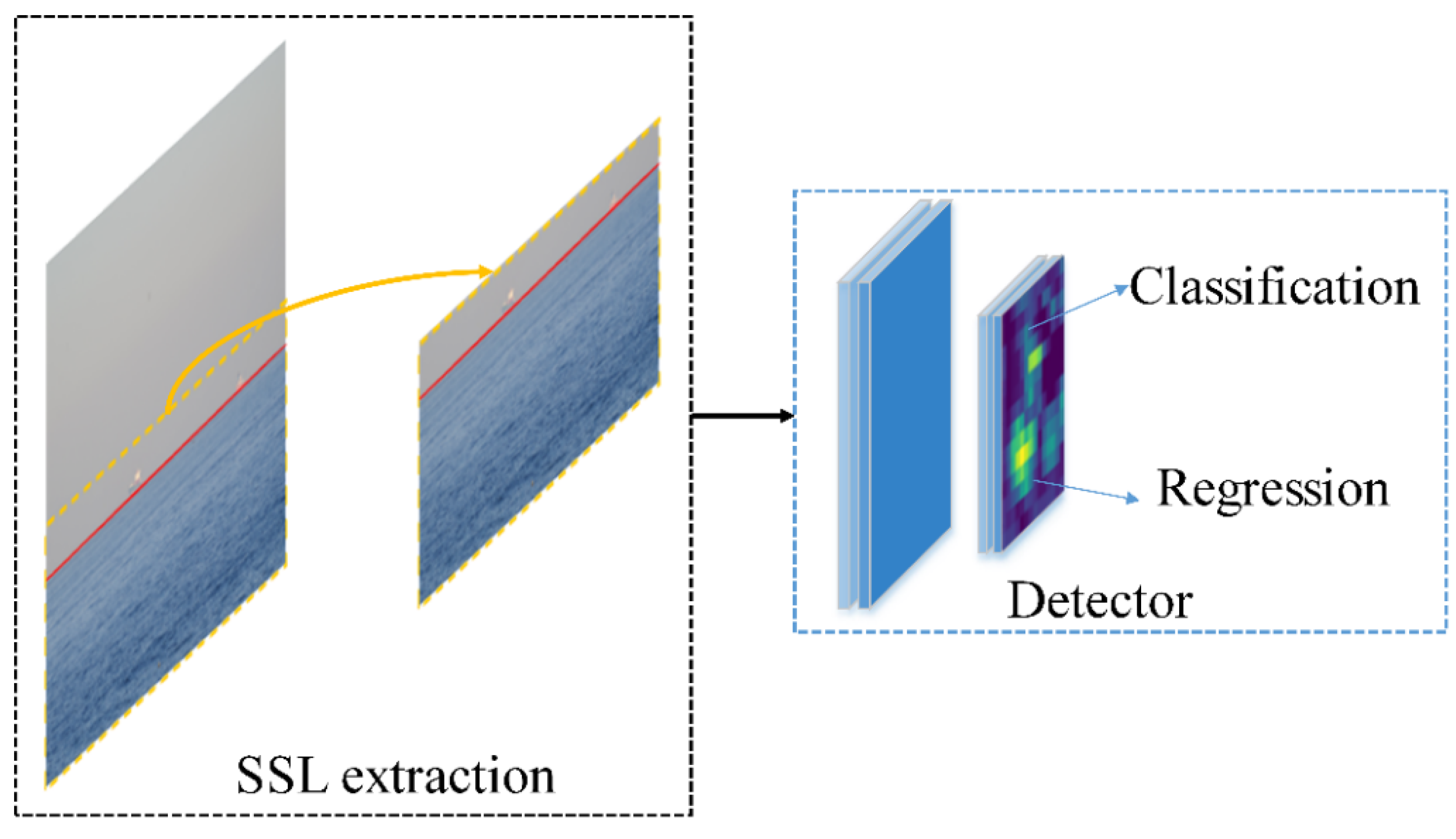
Discussion about the SSL
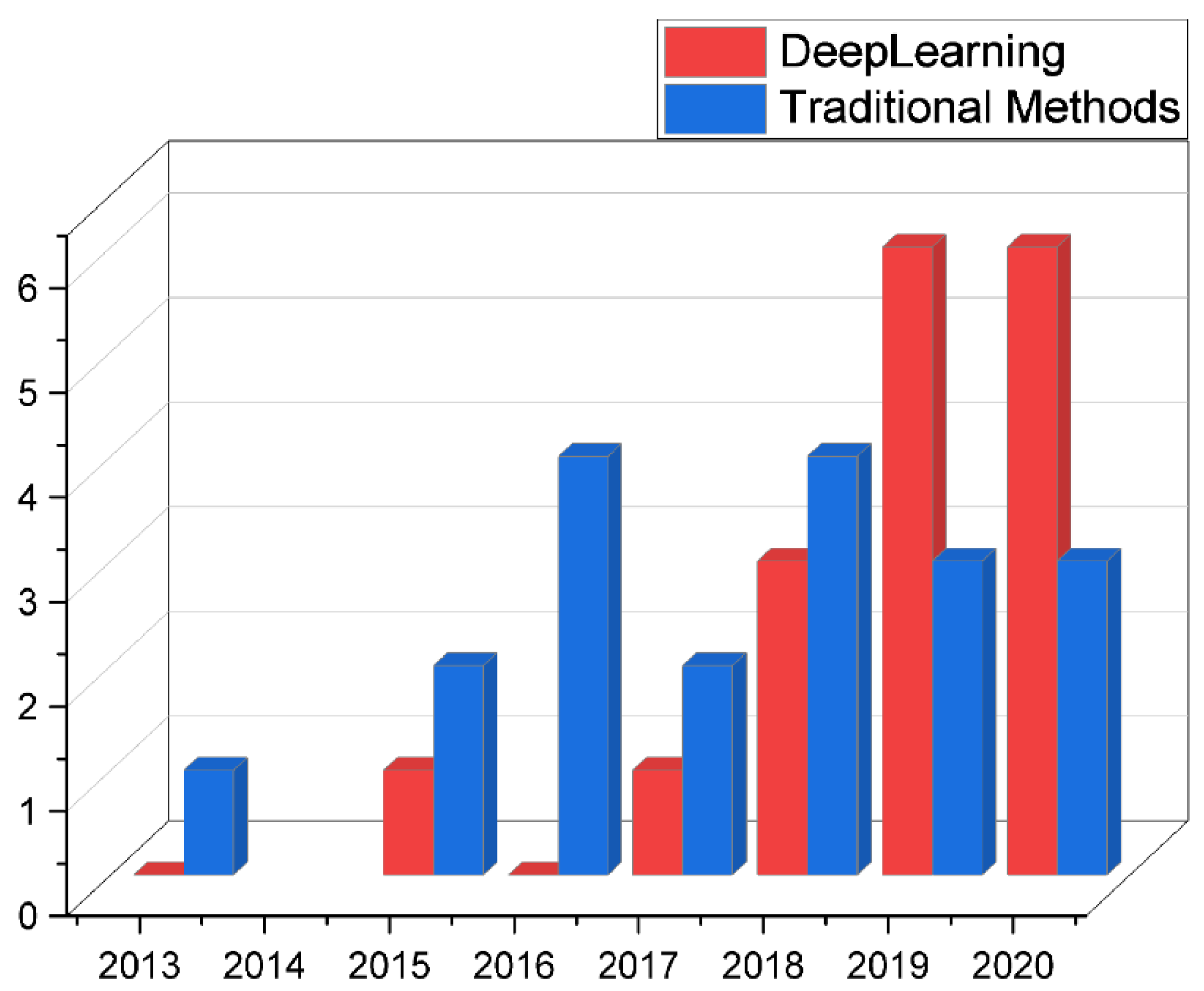
3.3. Comparison of Traditional Methods and Deep Learning
3.4. Validation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AIS | Automatic Identification System |
| API | Application Programming Interface |
| C-HOG | Circle Histogram of Oriented Gradient |
| CNN | Convolutional Neural Network |
| FN | False Negative |
| FP | False Positive |
| FPN | Feature Pyramid Network |
| FRFT | Fractional Fourier Transform |
| GBVS | Graph-Based Visual Saliency |
| GMM | Gaussian Mixture Model |
| HOSC | High-Order Statistical Curve |
| IoU | Intersection over Union |
| IR | Infrared |
| LWIR | Long-Wave Infrared |
| MWIR | Medium-Wave Infrared |
| NLDF | Nonlocal Depth Feature |
| ROI | Region of Interest |
| RPN | Region Proposal Network |
| SAR | Synthetic Aperture Radar |
| SDM | Standard Deviation Map |
| SSL | Sea–Sky Line |
| SVM | Support Vector Machine |
| SWIR | Short-Wave Infrared |
| TP | True Positive |
References
- Zhu, C.; Zhou, H.; Wang, R.; Guo, J. A novel hierarchical method of ship detection from spaceborne optical image based on shape and texture features. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3446–3456. [Google Scholar] [CrossRef]
- Kretschmann, L.; Burmeister, H.-C.; Jahn, C. Analyzing the economic benefit of unmanned autonomous ships: An exploratory cost-comparison between an autonomous and a conventional bulk carrier. Res. Transp. Bus. Manag. 2017, 25, 76–86. [Google Scholar] [CrossRef]
- Kanjir, U.; Greidanus, H.; Oštir, K. Vessel detection and classification from spaceborne optical images: A literature survey. Remote Sens. Environ. 2018, 207, 1–26. [Google Scholar] [CrossRef]
- Bao, X.; Zinger, S.; Wijnhoven, R. Ship detection in port surveillance based on context and motion saliency analysis. In Proceedings of the Video Surveillance and Transportation Imaging Applications, Burlingame, CA, USA, 3–7 February 2013; p. 86630D. [Google Scholar]
- Chen, S.; Wang, H.; Xu, F.; Jin, Y.-Q. Target classification using the deep convolutional networks for SAR images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4806–4817. [Google Scholar] [CrossRef]
- Lin, Z.; Ji, K.; Leng, X.; Kuang, G. Squeeze and excitation rank faster R-CNN for ship detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2018, 16, 751–755. [Google Scholar] [CrossRef]
- Kang, M.; Ji, K.; Leng, X.; Lin, Z. Contextual region-based convolutional neural network with multilayer fusion for SAR ship detection. Remote Sens. 2017, 9, 860. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. Automatic ship detection based on RetinaNet using multi-resolution Gaofen-3 imagery. Remote Sens. 2019, 11, 531. [Google Scholar] [CrossRef] [Green Version]
- Prasad, D.K.; Rajan, D.; Rachmawati, L.; Rajabally, E.; Quek, C. Video processing from electro-optical sensors for object detection and tracking in a maritime environment: A survey. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1993–2016. [Google Scholar] [CrossRef] [Green Version]
- Spraul, R.; Sommer, L.; Schumann, A. A comprehensive analysis of modern object detection methods for maritime vessel detection. In Proceedings of the Artificial Intelligence and Machine Learning in Defense Applications II, Online Only, 21–25 September 2020; p. 1154305. [Google Scholar]
- Fingas, M.; Brown, C. Review of ship detection from airborne platforms. Can. J. Remote Sens. 2001, 27, 379–385. [Google Scholar] [CrossRef]
- Chen, Z.; Li, B.; Tian, L.F.; Chao, D. Automatic detection and tracking of ship based on mean shift in corrected video sequences. In Proceedings of the 2017 2nd International Conference on Image, Vision and Computing (ICIVC), Chengdu, China, 2–4 June 2017; pp. 449–453. [Google Scholar]
- Cane, T.; Ferryman, J. Evaluating deep semantic segmentation networks for object detection in maritime surveillance. In Proceedings of the 2018 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018; pp. 1–6. [Google Scholar]
- Marie, V.; Bechar, I.; Bouchara, F. Real-time maritime situation awareness based on deep learning with dynamic anchors. In Proceedings of the 2018 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018; pp. 1–6. [Google Scholar]
- Chen, W.; Li, J.; Xing, J.; Yang, Q.; Zhou, Q. A maritime targets detection method based on hierarchical and multi-scale deep convolutional neural network. In Proceedings of the Tenth International Conference on Digital Image Processing (ICDIP 2018), Shanghai, China, 11–14 May 2018; p. 1080616. [Google Scholar]
- Chen, X.; Qi, L.; Yang, Y.; Postolache, O.; Yu, Z.; Xu, X. Port ship detection in complex environments. In Proceedings of the 2019 International Conference on Sensing and Instrumentation in IoT Era (ISSI), Lisbon, Portugal, 29–30 August 2019; pp. 1–6. [Google Scholar]
- Liu, L.; Liu, G.; Chu, X.; Jiang, Z.; Zhang, M.; Ye, J. Ship Detection and Tracking in Nighttime Video Images Based on the Method of LSDT. J. Phys. Conf. Ser. 2019, 1187, 042074. [Google Scholar] [CrossRef]
- Shan, X.; Zhao, D.; Pan, M.; Wang, D.; Zhao, L. Sea-Sky line and its nearby ships detection based on the motion attitude of visible light sensors. Sensors 2019, 19, 4004. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gal, O. Object Identification in Maritime Environments for ASV Path Planner. Int. J. Data Sci. Adv. Anal. 2019, 1, 18–26, ISSN 2563-4429. [Google Scholar]
- Lin, C.; Chen, W.; Zhou, H. Multi-Visual Feature Saliency Detection for Sea-Surface Targets through Improved Sea-Sky-Line Detection. J. Mar. Sci. Eng. 2020, 8, 799. [Google Scholar] [CrossRef]
- Chen, X.; Qi, L.; Yang, Y.; Luo, Q.; Postolache, O.; Tang, J.; Wu, H. Video-based detection infrastructure enhancement for automated ship recognition and behavior analysis. J. Adv. Transp. 2020, 2020, 7194342. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.-J.; Roh, M.-I.; Oh, M.-J. Image-based ship detection using deep learning. Ocean Syst. Eng. 2020, 10, 415–434. [Google Scholar] [CrossRef]
- Feng, J.; Li, B.; Tian, L.; Dong, C. Rapid Ship Detection Method on Movable Platform Based on Discriminative Multi-Size Gradient Features and Multi-Branch Support Vector Machine. IEEE Trans. Intell. Transp. Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Shan, Y.; Zhou, X.; Liu, S.; Zhang, Y.; Huang, K. SiamFPN: A deep learning method for accurate and real-time maritime ship tracking. IEEE Trans. Circuits Syst. Video Technol. 2020, 31, 315–325. [Google Scholar] [CrossRef]
- Fefilatyev, S.; Goldgof, D.; Shreve, M.; Lembke, C. Detection and tracking of ships in open sea with rapidly moving buoy-mounted camera system. Ocean Eng. 2012, 54, 1–12. [Google Scholar] [CrossRef]
- Tang, D.; Sun, G.; Wang, D.-H.; Niu, Z.-D.; Chen, Z.-P. Research on infrared ship detection method in sea-sky background. In Proceedings of the International Symposium on Photoelectronic Detection and Imaging 2013: Infrared Imaging and Applications, Beijing, China, 25–27 June 2013; p. 89072H. [Google Scholar]
- Liu, Z.; Jiang, T.; Zhang, T.; Li, Y. IR ship target saliency detection based on lightweight non-local depth features. In Proceedings of the 2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE), Xiamen, China, 18–20 October 2019; pp. 1681–1686. [Google Scholar]
- Hu, Z.; Qin, H.; Peng, X.; Yue, T.; Yue, H.; Luo, G.; Zhu, W. Infrared polymorphic target recognition based on single step cascade neural network. In Proceedings of the AOPC 2019: AI in Optics and Photonics, Beijing, China, 7–9 July 2019; p. 113420T. [Google Scholar]
- Lin, J.; Yu, Q.; Chen, G. Infrared ship target detection based on the combination of Bayesian theory and SVM. In Proceedings of the MIPPR 2019: Automatic Target Recognition and Navigation, Wuhan, China, 2–3 November 2019; p. 1142919. [Google Scholar]
- Özertem, K.A. A fast automatic target detection method for detecting ships in infrared scenes. In Proceedings of the Automatic Target Recognition XXVI, Baltimore, MD, USA, 17–21 April 2016; p. 984404. [Google Scholar]
- Wang, X.; Zhang, T. Clutter-adaptive infrared small target detection in infrared maritime scenarios. Opt. Eng. 2011, 50, 067001. [Google Scholar] [CrossRef]
- Sun, Y.-Q.; Tian, J.-W.; Liu, J. Background suppression based-on wavelet transformation to detect infrared target. In Proceedings of the 2005 International Conference on Machine Learning and Cybernetics, Guangzhou, China, 18–21 August 2005; pp. 4611–4615. [Google Scholar]
- Lu, J.-W.; He, Y.-J.; Li, H.-Y.; Lu, F.-L. Detecting small target of ship at sea by infrared image. In Proceedings of the 2006 IEEE International Conference on Automation Science and Engineering, Shanghai, China, 8–10 October 2006; pp. 165–169. [Google Scholar]
- Bai, X.; Chen, Z.; Zhang, Y.; Liu, Z.; Lu, Y. Infrared ship target segmentation based on spatial information improved FCM. IEEE Trans. Cybern. 2015, 46, 3259–3271. [Google Scholar] [CrossRef]
- Leira, F.S.; Johansen, T.A.; Fossen, T.I. Automatic detection, classification and tracking of objects in the ocean surface from UAVs using a thermal camera. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–10. [Google Scholar]
- Bai, X.; Liu, M.; Wang, T.; Chen, Z.; Wang, P.; Zhang, Y. Feature based fuzzy inference system for segmentation of low-contrast infrared ship images. Appl. Soft Comput. 2016, 46, 128–142. [Google Scholar] [CrossRef]
- Mumtaz, A.; Jabbar, A.; Mahmood, Z.; Nawaz, R.; Ahsan, Q. Saliency based algorithm for ship detection in infrared images. In Proceedings of the 2016 13th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 12–16 January 2016; pp. 167–172. [Google Scholar]
- Singh, R.; Vashisht, M.; Qamar, S. Role of linguistic quantifier and digitally approximated Laplace operator in infrared based ship detection. Int. J. Syst. Assur. Eng. Manag. 2017, 8, 1336–1342. [Google Scholar] [CrossRef]
- Zhang, Y.; Shang, J.; Xie, B.; Ding, R.; Zhang, Z. Research for infrared ship target characteristics based on space-based detection. In Proceedings of the Advanced Optical Imaging Technologies, Beijing, China, 11–13 October 2018; p. 108160U. [Google Scholar]
- Xu, G.; Wang, J.; Qi, S. Ship detection based on rotation-invariant HOG descriptors for airborne infrared images. In Proceedings of the MIPPR 2017: Pattern Recognition and Computer Vision, Xiangyang, China, 28–29 October 2017; p. 1060912. [Google Scholar]
- Zhou, A.; Xie, W.; Pei, J. Infrared maritime target detection using the high order statistic filtering in fractional Fourier domain. Infrared Phys. Technol. 2018, 91, 123–136. [Google Scholar] [CrossRef]
- Schöller, F.E.; Plenge-Feidenhans, M.K.; Stets, J.D.; Blanke, M. Assessing deep-learning methods for object detection at sea from LWIR images. IFAC Pap. 2019, 52, 64–71. [Google Scholar] [CrossRef]
- Li, Y.; Li, Z.; Zhu, Y.; Li, B.; Xiong, W.; Huang, Y. Thermal infrared small ship detection in sea clutter based on morphological reconstruction and multi-feature analysis. Appl. Sci. 2019, 9, 3786. [Google Scholar] [CrossRef] [Green Version]
- Westlake, S.T.; Volonakis, T.N.; Jackman, J.; James, D.B.; Sherriff, A. Deep learning for automatic target recognition with real and synthetic infrared maritime imagery. In Proceedings of the Artificial Intelligence and Machine Learning in Defense Applications II, Online Only, 21–25 September 2020; p. 1154309. [Google Scholar]
- Islam, M.M.; Islam, M.N.; Asari, K.V.; Karim, M.A. Anomaly based vessel detection in visible and infrared images. In Proceedings of the Image Processing: Machine Vision Applications II, San Jose, CA, USA, 18–22 January 2009; p. 72510B. [Google Scholar]
- Wei, H.; Nguyen, H.; Ramu, P.; Raju, C.; Liu, X.; Yadegar, J. Automated intelligent video surveillance system for ships. In Proceedings of the Optics and Photonics in Global Homeland Security V and Biometric Technology for Human Identification VI, Orlando, FL, USA, 13–17 April 2009; p. 73061N. [Google Scholar]
- Nita, C.; Vandewal, M. CNN-based object detection and segmentation for maritime domain awareness. In Proceedings of the Artificial Intelligence and Machine Learning in Defense Applications II, Online Only, 21–25 September 2020; p. 1154306. [Google Scholar]
- Zhang, M.M.; Choi, J.; Daniilidis, K.; Wolf, M.T.; Kanan, C. VAIS: A dataset for recognizing maritime imagery in the visible and infrared spectrums. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Boston, MA, USA, 7–12 June 2015; pp. 10–16. [Google Scholar]
- Ribeiro, R.; Cruz, G.; Matos, J.; Bernardino, A. A data set for airborne maritime surveillance environments. IEEE Trans. Circuits Syst. Video Technol. 2017, 29, 2720–2732. [Google Scholar] [CrossRef]
- Farahnakian, F.; Heikkonen, J. Deep learning based multi-modal fusion architectures for maritime vessel detection. Remote Sens. 2020, 12, 2509. [Google Scholar] [CrossRef]
- Stets, J.D.; Schöller, F.E.; Plenge-Feidenhans, M.K.; Andersen, R.H.; Hansen, S.; Blanke, M. Comparing spectral bands for object detection at sea using convolutional neural networks. J. Phys. Conf. Ser. 2019, 1357, 012036. [Google Scholar] [CrossRef]
- Bouma, H.; de Lange, D.-J.J.; van den Broek, S.P.; Kemp, R.A.; Schwering, P.B. Automatic detection of small surface targets with electro-optical sensors in a harbor environment. In Proceedings of the Electro-Optical Remote Sensing, Photonic Technologies, and Applications II, Cardiff, Wales, UK, 15–18 September 2008; p. 711402. [Google Scholar]
- Perić, D.; Livada, B. Analysis of SWIR Imagers Application in Electro-Optical Systems. In Proceedings of the Proceedings of 4th International Conference on Electrical, Electronics and Computing Engineering, IcETRAN, Kladovo, Serbia, 5–8 June 2017; pp. 5–8. [Google Scholar]
- Farahnakian, F.; Movahedi, P.; Poikonen, J.; Lehtonen, E.; Makris, D.; Heikkonen, J. Comparative analysis of image fusion methods in marine environment. In Proceedings of the 2019 IEEE International Symposium on Robotic and Sensors Environments (ROSE), Ottawa, ON, Canada, 17–18 June 2019; pp. 1–8. [Google Scholar]
- Zhang, Y.; Li, Q.-Z.; Zang, F.-N. Ship detection for visual maritime surveillance from non-stationary platforms. Ocean Eng. 2017, 141, 53–63. [Google Scholar] [CrossRef]
- Shi, Q.; Li, W.; Tao, R.; Sun, X.; Gao, L. Ship classification based on multifeature ensemble with convolutional neural network. Remote Sens. 2019, 11, 419. [Google Scholar] [CrossRef] [Green Version]
- Wu, D.; Zheng, S.-J.; Zhang, X.-P.; Yuan, C.-A.; Cheng, F.; Zhao, Y.; Lin, Y.-J.; Zhao, Z.-Q.; Jiang, Y.-L.; Huang, D.-S. Deep learning-based methods for person re-identification: A comprehensive review. Neurocomputing 2019, 337, 354–371. [Google Scholar] [CrossRef]
- Liu, X.; Liu, W.; Mei, T.; Ma, H. A deep learning-based approach to progressive vehicle re-identification for urban surveillance. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 869–884. [Google Scholar]
- Zhou, Y.; Liu, L.; Shao, L. Vehicle re-identification by deep hidden multi-view inference. IEEE Trans. Image Process. 2018, 27, 3275–3287. [Google Scholar] [CrossRef]
- Zhou, Y.; Shao, L. Aware attentive multi-view inference for vehicle re-identification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6489–6498. [Google Scholar]
- Amaechi, C.V.; Chesterton, C.; Butler, H.O.; Wang, F.; Ye, J. An Overview on Bonded Marine Hoses for sustainable fluid transfer and (un) loading operations via Floating Offshore Structures (FOS). J. Mar. Sci. Eng. 2021, 9, 1236. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Wang, F.; Ye, J. Mathematical Modelling of Bonded Marine Hoses for Single Point Mooring (SPM) Systems, with Catenary Anchor Leg Mooring (CALM) Buoy application—A Review. J. Mar. Sci. Eng. 2021, 9, 1179. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Chesterton, C.; Butler, H.O.; Wang, F.; Ye, J. Review on the design and mechanics of bonded marine hoses for Catenary Anchor Leg Mooring (CALM) buoys. Ocean Eng. 2021, 242, 110062. [Google Scholar] [CrossRef]
- Odijie, A.C.; Wang, F.; Ye, J. A review of floating semisubmersible hull systems: Column stabilized unit. Ocean Eng. 2017, 144, 191–202. [Google Scholar] [CrossRef] [Green Version]
- Lipschutz, I.; Gershikov, E.; Milgrom, B. New methods for horizon line detection in infrared and visible sea images. Int. J. Comput. Eng. Res 2013, 3, 1197–1215. [Google Scholar]
- Fefilatyev, S.; Smarodzinava, V.; Hall, L.O.; Goldgof, D.B. Horizon detection using machine learning techniques. In Proceedings of the 2006 5th International Conference on Machine Learning and Applications (ICMLA’06), Orlando, FL, USA, 14–16 December 2006; pp. 17–21. [Google Scholar]
- Liang, D.; Zhang, W.; Huang, Q.; Yang, F. Robust sea-sky-line detection for complex sea background. In Proceedings of the 2015 IEEE International Conference on Progress in Informatics and Computing (PIC), Nanjing, China, 18–20 December 2015; pp. 317–321. [Google Scholar]
- Sun, Y.; Fu, L. Coarse-fine-stitched: A robust maritime horizon line detection method for unmanned surface vehicle applications. Sensors 2018, 18, 2825. [Google Scholar] [CrossRef] [Green Version]
- Liang, D.; Liang, Y. Horizon detection from electro-optical sensors under maritime environment. IEEE Trans. Instrum. Meas. 2019, 69, 45–53. [Google Scholar] [CrossRef]
- Yang, W.; Li, H.; Liu, J.; Xie, S.; Luo, J. A sea-sky-line detection method based on Gaussian mixture models and image texture features. Int. J. Adv. Robot. Syst. 2019, 16, 1–12. [Google Scholar] [CrossRef]
- Jeong, C.; Yang, H.S.; Moon, K. Horizon detection in maritime images using scene parsing network. Electron. Lett. 2018, 54, 760–762. [Google Scholar] [CrossRef]
- Wang, A.-B.; Wang, C.-X.; Su, W.-X.; Dong, Y.-F. Adaptive segmentation algorithm for ship target under complex background. In Proceedings of the 2010 3rd International Conference on Advanced Computer Theory and Engineering (ICACTE), Chengdu, China, 20–22 August 2010; pp. V2-219–V2-223. [Google Scholar]
- Jiao, L.; Zhang, F.; Liu, F.; Yang, S.; Li, L.; Feng, Z.; Qu, R. A survey of deep learning-based object detection. IEEE Access 2019, 7, 128837–128868. [Google Scholar] [CrossRef]
- TensorFlow. Available online: https://www.tensorflow.org (accessed on 28 November 2021).
- Keras. Available online: https://keras.io/ (accessed on 28 November 2021).
- PyTorch. Available online: https://pytorch.org/ (accessed on 28 November 2021).
- MXNet. Available online: https://mxnet.apache.org (accessed on 28 November 2021).
- CNTK. Available online: https://docs.microsoft.com/en-us/cognitive-toolkit/ (accessed on 28 November 2021).
- Theano. Available online: https://pypi.org/project/Theano/ (accessed on 28 November 2021).
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. All the Code Is Online. Available online: https://pjreddie.com/yolo/ (accessed on 28 November 2021).
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 21–37. [Google Scholar]
- Fu, C.-Y.; Liu, W.; Ranga, A.; Tyagi, A.; Berg, A.C. Dssd: Deconvolutional single shot detector. arXiv 2017, arXiv:1701.06659. Available online: https://github.com/chengyangfu/caffe/tree/dssd (accessed on 28 November 2021).
- Gal, O. High Level Mission Assignment Optimization. Int. J. Data Sci. Adv. Anal. 2020, 2, 26–29. [Google Scholar]
- Oksuz, K.; Cam, B.C.; Kalkan, S.; Akbas, E. Imbalance problems in object detection: A review. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 3388–3415. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Electro-Optical Images | Articles | |
|---|---|---|
| Visible | Chen [12], Cane [13], Marie [14], Chen [15], Chen [16], Liu [17], Shan [18], Gal [19], Lin [20], Chen [21], Lee [22], Feng [23], Shan [24], Fefilatyev [25] | |
| IR | N/A | Tang [26], Liu [27], Hu [28], Lin [29] |
| MWIR | Özertem [30], Wang [31] | |
| LWIR | Sun [32], Lu [33], Bai [34], Leira [35], Bai [36], Mumtaz [37], Singh [38], Zhang [39], Xu [40], Zhou [41], Schöller [42], Li [43], Westlake [44] | |
| Visible + IR | N/A | Islam [45], Wei [46] |
| Visible + MWIR | Nita [47] | |
| Visible + LWIR | Zhang [48], Ribeiro [49], Farahnakian [50] | |
| Visible + SWIR + LWIR | Stets [51] | |
| Visible + SWIR + MWIR + LWIR | Bouma [52] | |
| Articles | Description Features of Regions |
|---|---|
| Bouma [52] | Local intensity differences |
| Wang [31] | Threshold, standard deviation map (SDM) features, width, height, centroid, and area |
| Fefilatyev [66] | Intensity, mean, standard deviation, smoothness, third moment, uniformity, entropy |
| Liang [67] | Texture, threshold |
| Sun [68] | Gradient features |
| Liang [69] | Probability distribution, physical characteristics: texture, linear features, color, and context information |
| Lin [20] | Gradient integral curve of an image |
| Methods of SSL Detection | Articles | Advantages | Disadvantages |
|---|---|---|---|
| Transformation | Wei [46], Tang [26], Özertem [30], Chen [12] | The algorithms are mature and easy to use. |
|
| Region attributes | Bouma [52], Wang [31], Fefilatyev [66], Liang [67], Sun [68], Liang [69], Lin [20] | It prevents the influence of local noise and is more robust. |
|
| Semantic segmentation | Yang [70], Jeong [71] | It can obtain a more accurate location of the SSL. | It may not meet the real-time requirements on embedded computing devices. |
| Methods of ROI Extraction | Articles | Advantages | Disadvantages |
|---|---|---|---|
| SSL based | Lu [33], Chen [12], Shan [18], Fefilatyev [25] | It is simple and fast. | The location error of the SSL will reduce the accuracy of ROI extraction. |
| Threshold based | Wang [72], Singh [38], Bouma [52] | It is simple and easy to use. |
|
| Saliency detection | Li [43], Liu [27], Mumtaz [37], Lin [20] |
| A large area of strong sea clutter can cause misidentification of the saliency regions. |
| Frequency domain | Zhou [41], Sun [32] | This method can suppress the background noise well. | When the sea clutter is strong, it is difficult to separate the background and target only by frequency spectrum features. |
| Methods of Ship Identification | Articles | Features | Advantages | Disadvantages |
|---|---|---|---|---|
| Prior knowledge | Tang [26], Özertem [30], Lu [33], Li [43] | Aspect ratio, contrast ratio, duty ratio, ship size, grayscale, distance rule, gray rule, and shape | Simple and easy to use. | The robustness is weak, for example, a change in the detection angle, the detection distance, and light conditions make the ship show different characteristics. |
| Classifier | Xu [40], Lin [29] | C-HOG, shape, size, and texture | The method is robust. |
|
| Deep Learning Frameworks | Organization | Interface |
|---|---|---|
| TensorFlow [74] | Python, C++, Java, and Go | |
| Keras [75] | Python, R | |
| PyTorch [76] | Python, C++ | |
| MXNet [77] | Amazon | Python, C++, Clojure, Julia, Perl, R, Scala, and Java |
| CNTK [78] | Microsoft | Python, C++, C#/.NET, and Java |
| Theano [79] | Université de Montréal | Python |
| Methods of Deep Learning | Articles | Model | Advantages | Disadvantages |
|---|---|---|---|---|
| One stage | Chen [16], Westlake [44], Chen [21] | YOLO | One-stage detectors are time efficient, have fast detection speeds, and are suitable for deployment to embedded platforms. They are suitable for shipborne platforms. | The detection accuracy is usually less than that of a two-stage detector. |
| Stets [51] | Retina-Net | |||
| Lee [22], Hu [28] | Other | |||
| Two stage | Marie [14] | Fast R-CNN | Two-stage detectors commonly obtain more accurate detection results. They are suitable for shore-static platforms. | The detection speed is slow, the calculation amount is large, and they are not suitable to deploy on embedded platforms. |
| Chen [15], Shan [24] | Other | |||
| Others | Gal [88], Farahnakian [50], Liu [27], Cane [13], Nita [47] | |||
| Methods | Advantages | Disadvantages |
|---|---|---|
| Traditional methods |
|
|
| Deep learning |
| Need many hand-labeled training data in real scenarios. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Fan, S.; Liu, Y.; Li, Y.; Fei, C.; Liu, J.; Liu, B.; Dong, Y.; Liu, Z.; Zhao, X. A Review of Methods for Ship Detection with Electro-Optical Images in Marine Environments. J. Mar. Sci. Eng. 2021, 9, 1408. https://doi.org/10.3390/jmse9121408
Wang L, Fan S, Liu Y, Li Y, Fei C, Liu J, Liu B, Dong Y, Liu Z, Zhao X. A Review of Methods for Ship Detection with Electro-Optical Images in Marine Environments. Journal of Marine Science and Engineering. 2021; 9(12):1408. https://doi.org/10.3390/jmse9121408
Chicago/Turabian StyleWang, Liqian, Shuzhen Fan, Yunxia Liu, Yongfu Li, Cheng Fei, Junliang Liu, Bohan Liu, Yakui Dong, Zhaojun Liu, and Xian Zhao. 2021. "A Review of Methods for Ship Detection with Electro-Optical Images in Marine Environments" Journal of Marine Science and Engineering 9, no. 12: 1408. https://doi.org/10.3390/jmse9121408
APA StyleWang, L., Fan, S., Liu, Y., Li, Y., Fei, C., Liu, J., Liu, B., Dong, Y., Liu, Z., & Zhao, X. (2021). A Review of Methods for Ship Detection with Electro-Optical Images in Marine Environments. Journal of Marine Science and Engineering, 9(12), 1408. https://doi.org/10.3390/jmse9121408