
Prediction of Maneuverability in Shallow Water of Fishing Trawler by Using Empirical Formula


Abstract
1. Introduction
2. Mathematical Model
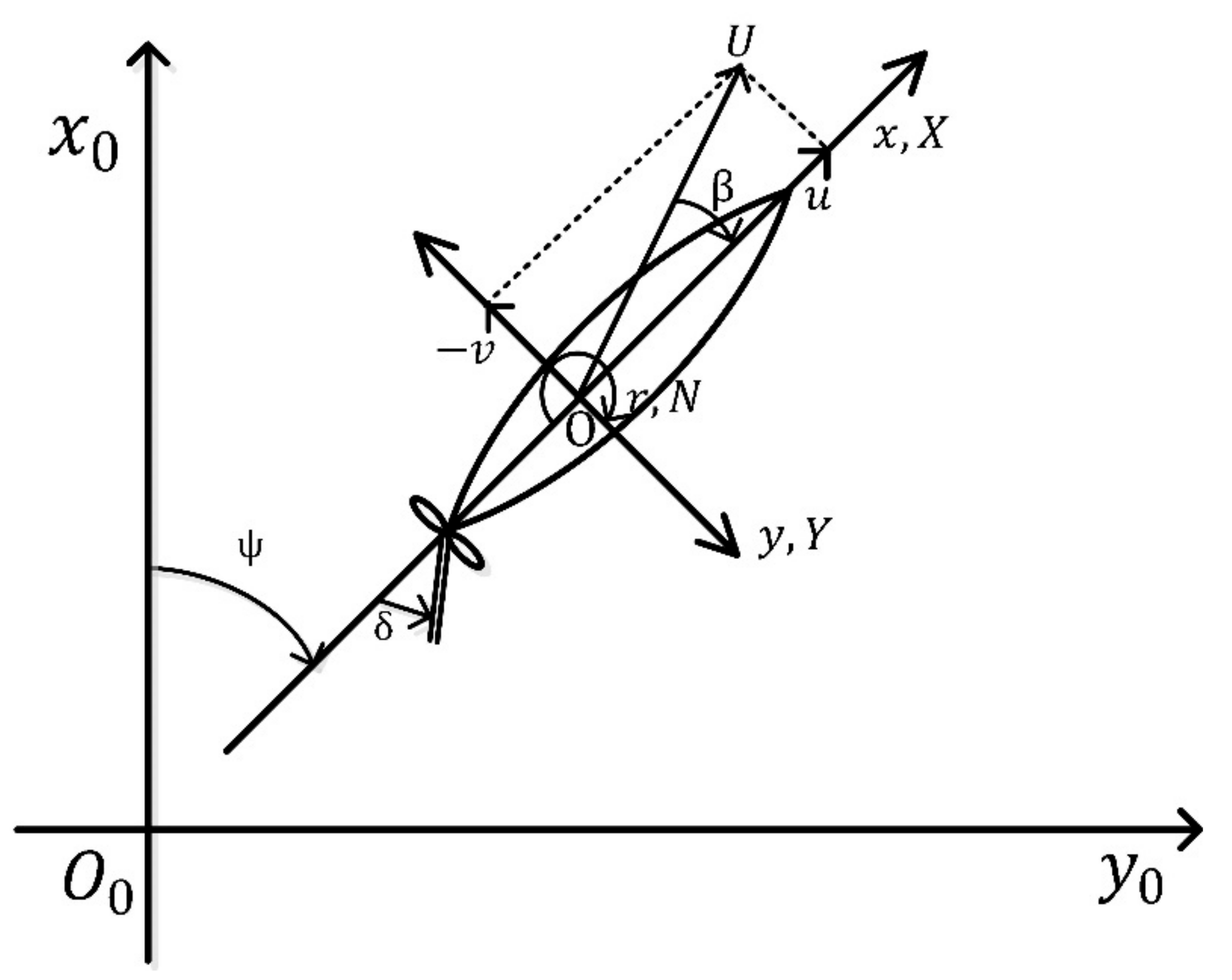
2.1. Coordinate System and Motion Equations
2.2. Forces and Moment Affecting the Hull
2.3. Forces and Moment from the Propeller
2.4. Forces and Moment from the Rudder
3. Empirical Formula
3.1. Kijima et al. Empirical Formula
3.2. Corrected Empirical Formula
- (1)
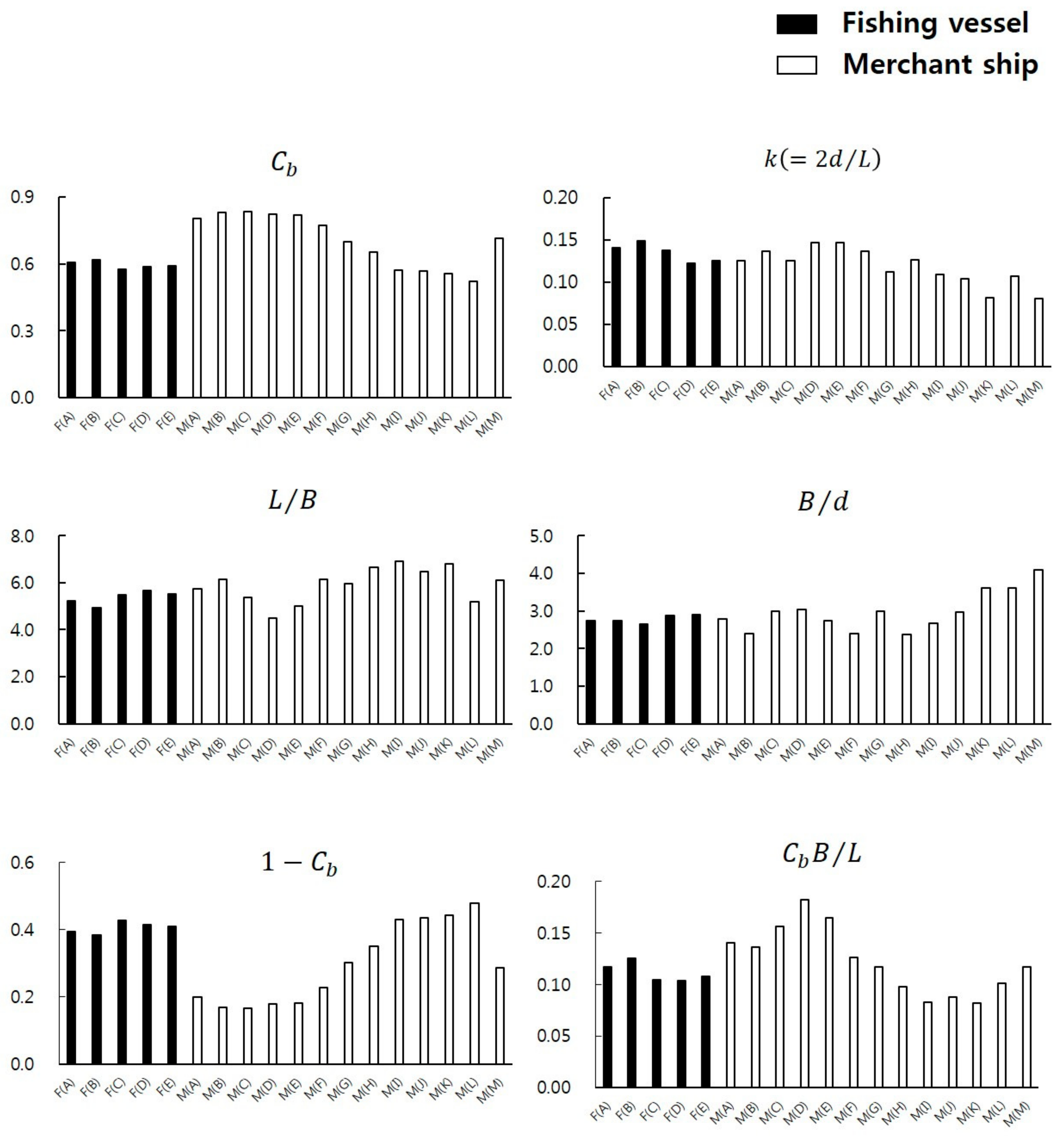
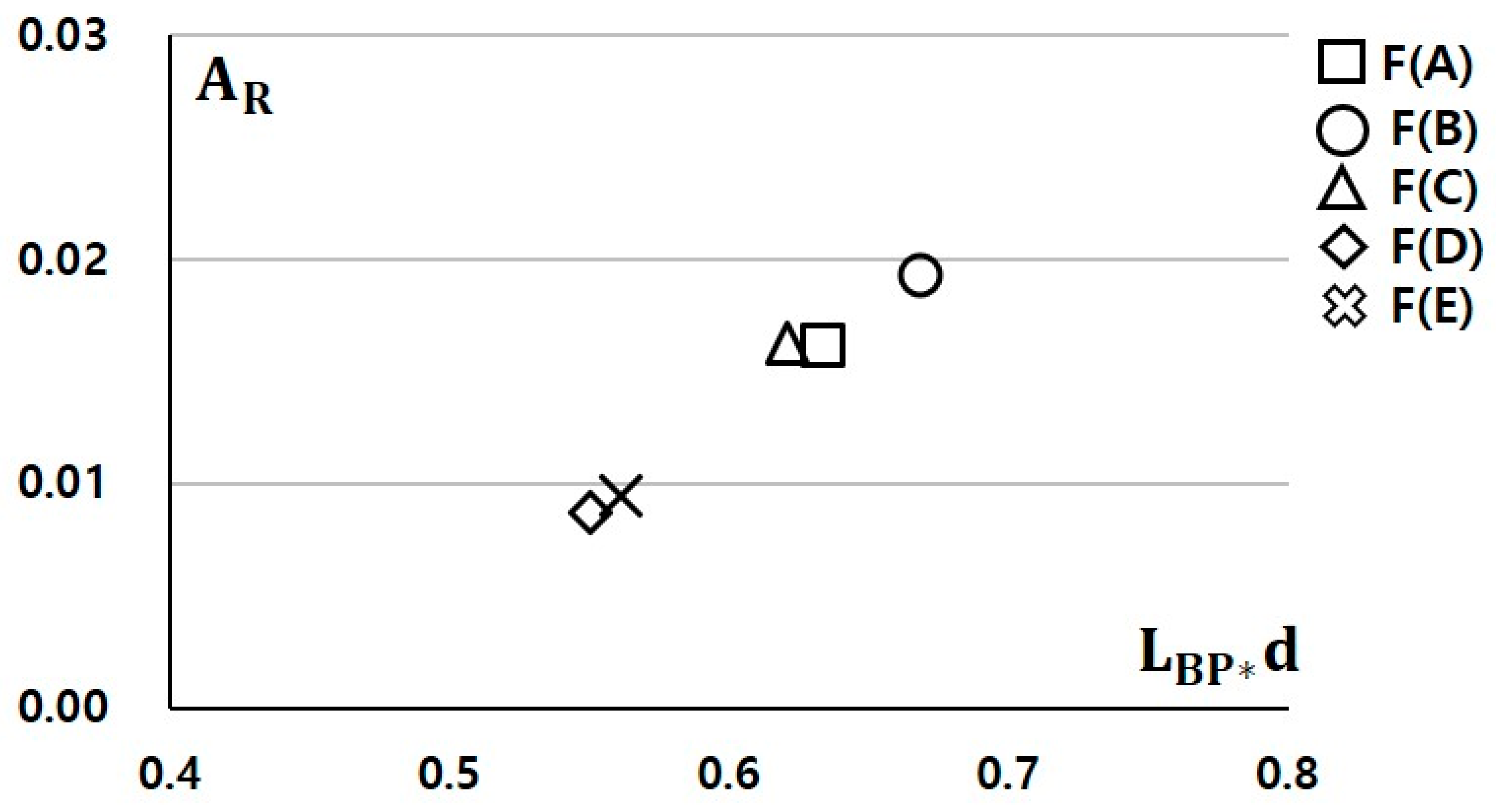
- Prior to the study, the hull shape parameters of 5 model fishing vessels (5 Stern trawlers) used for deriving the corrected empirical formula were compared to 13 merchant ships (2 VLCCs, 3 ULCCs, 3 Cargo ships, 2 Container ships, 1 RO/RO ship, 1 Car carrier ship, and 1 LNG ship) included in the model test process for deriving the Kijima et al. empirical formula (Equation (7)). The Cb of the model fishing vessels used in the study had similar values to the high-speed slender ship (container and car carrier), while L/B was similar to a low-speed full ship (VLCC and ULCC). From these results, it can be seen that the fishing vessels have some distinct characteristics different from those of the merchant ships (Table 1, Figure 2).
- (2)
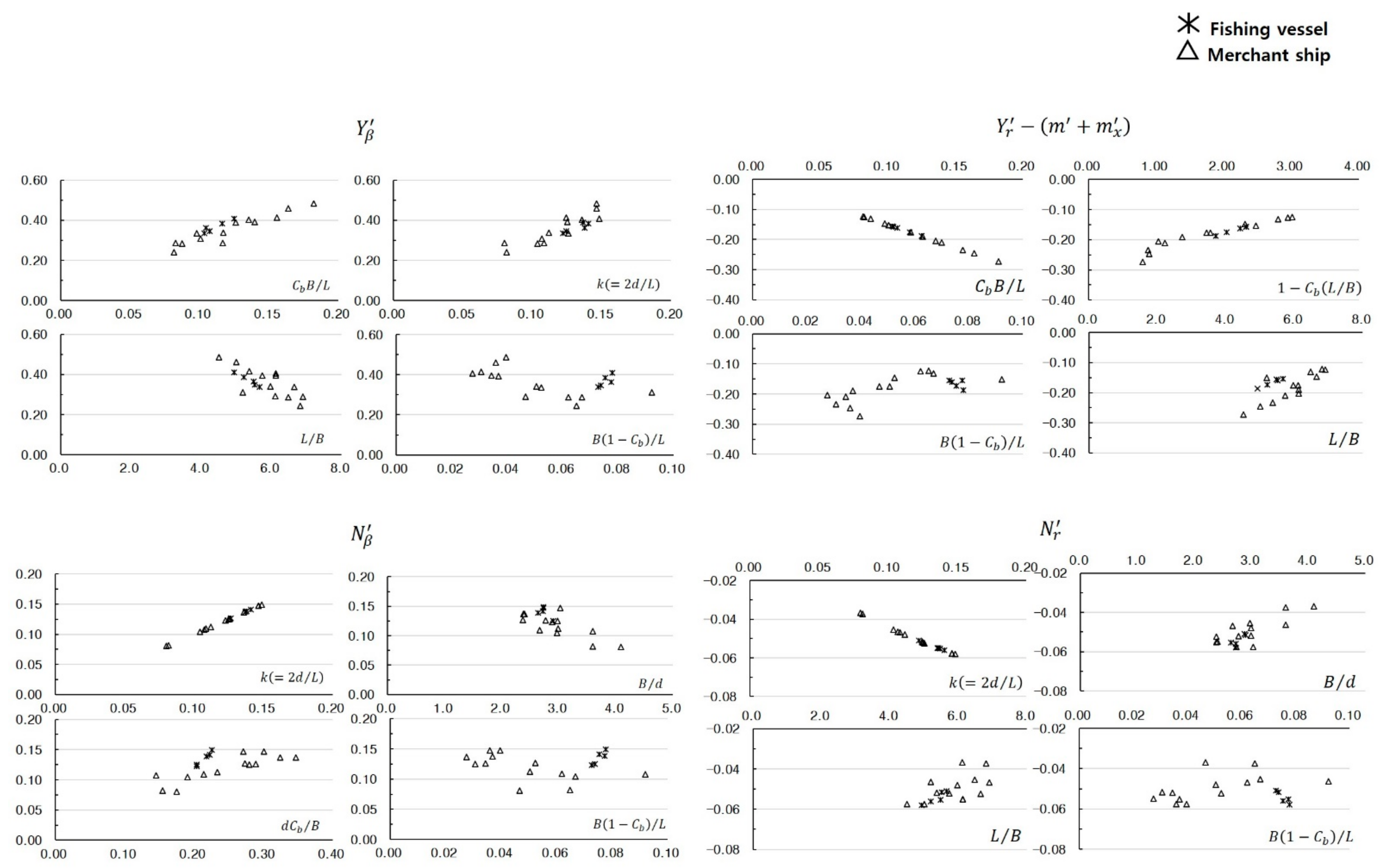
- It was also discovered that hull shape parameter has a strong correlation to deriving the hydrodynamic coefficients adapting the empirical formula of Kijima et al. The coefficients showing the different tendencies of merchant ships and fishing vessels were recognized. Examples of typical hydrodynamic coefficients are shown in Table 2 and Figure 3.
- (3)
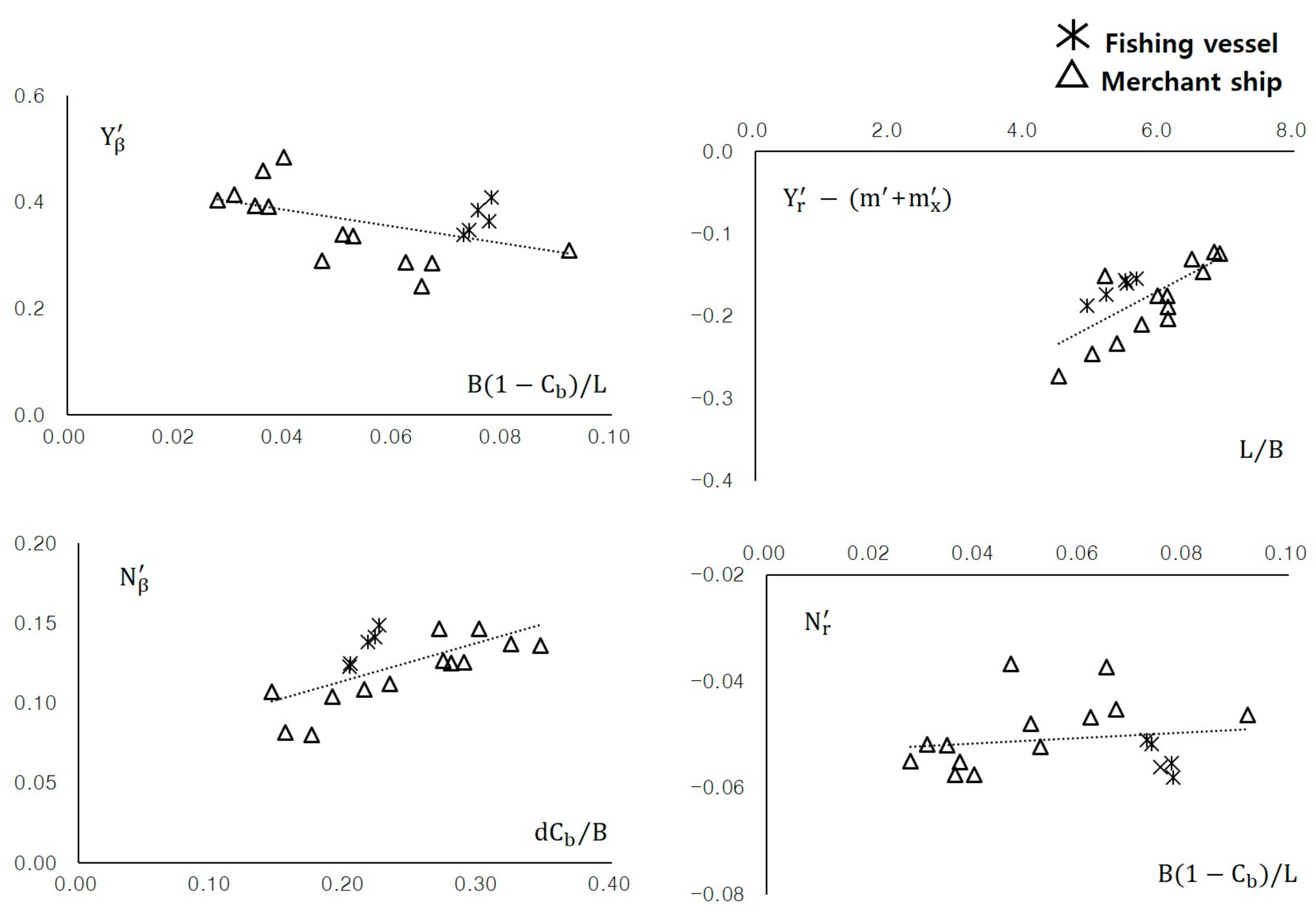
- The correlation between the selected characteristics of hull shape parameters and the maneuvering hydrodynamic coefficients are shown and averaged using a trend line to derive a corrected empirical formula expected to be more suitable for fishing vessels (Figure 4). The equations for deriving the coefficients in the even keel state are shown in Equation (8) below.
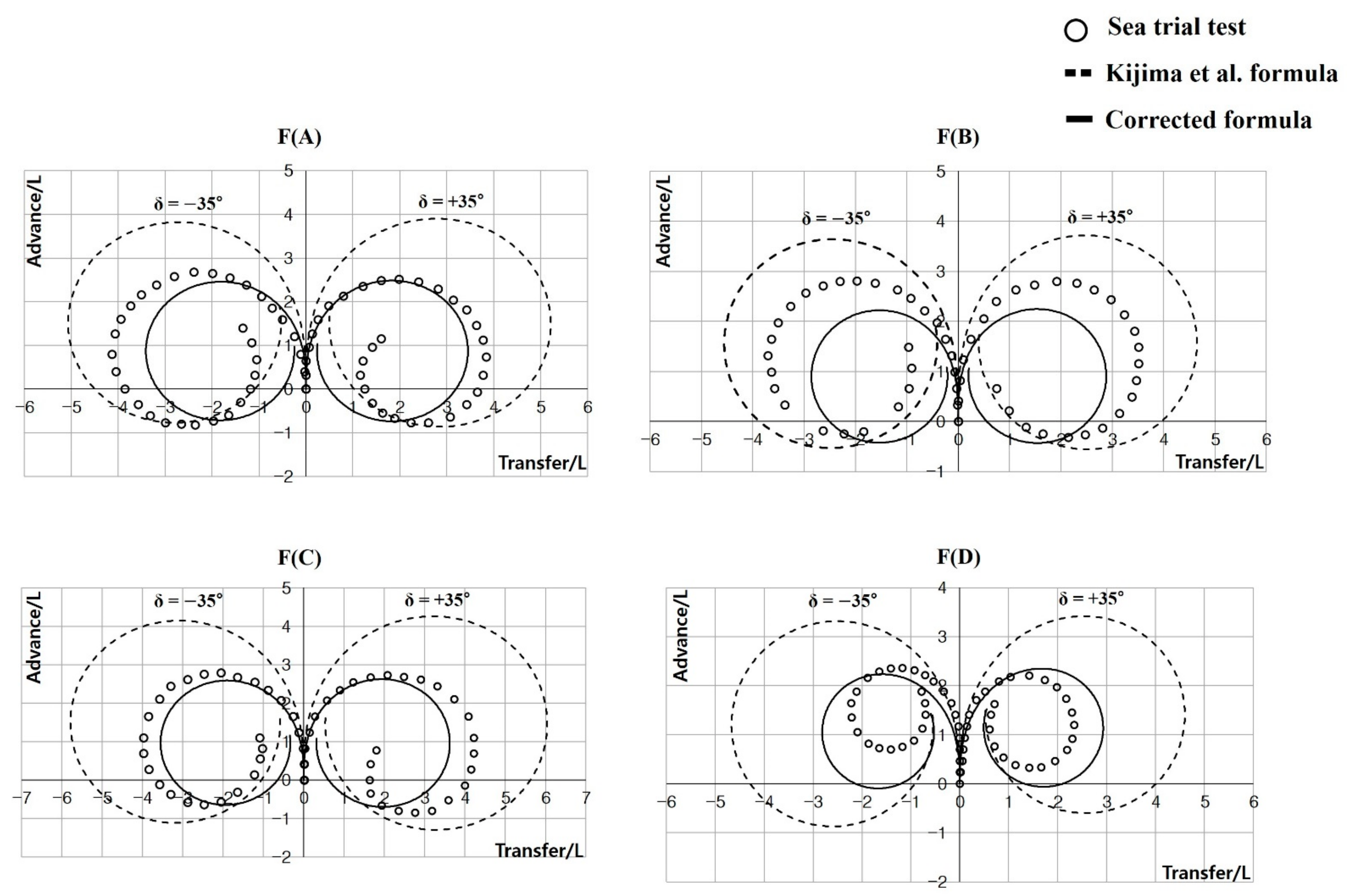
- (4)
- The results for maneuvering hydrodynamic coefficients of the 5 model fishing vessels were derived from the corrected empirical formula (Table 3), and the validity was verified by performing a turning movement simulation in 4 vessels, except for F(E), which was under construction at the time (Figure 5).
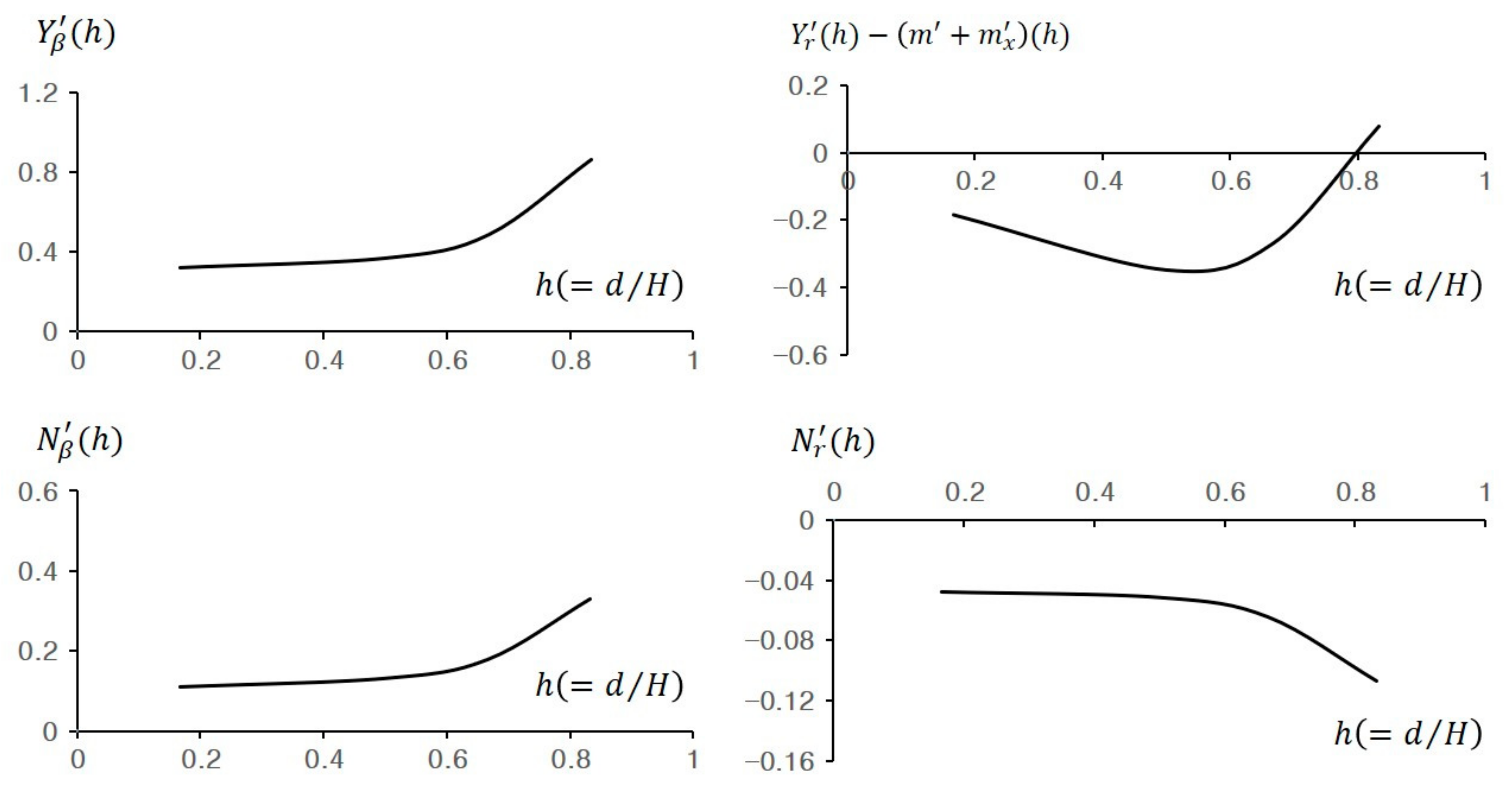
3.3. Kijima et al. Empirical Formula in Shallow Water including Correcting Factors
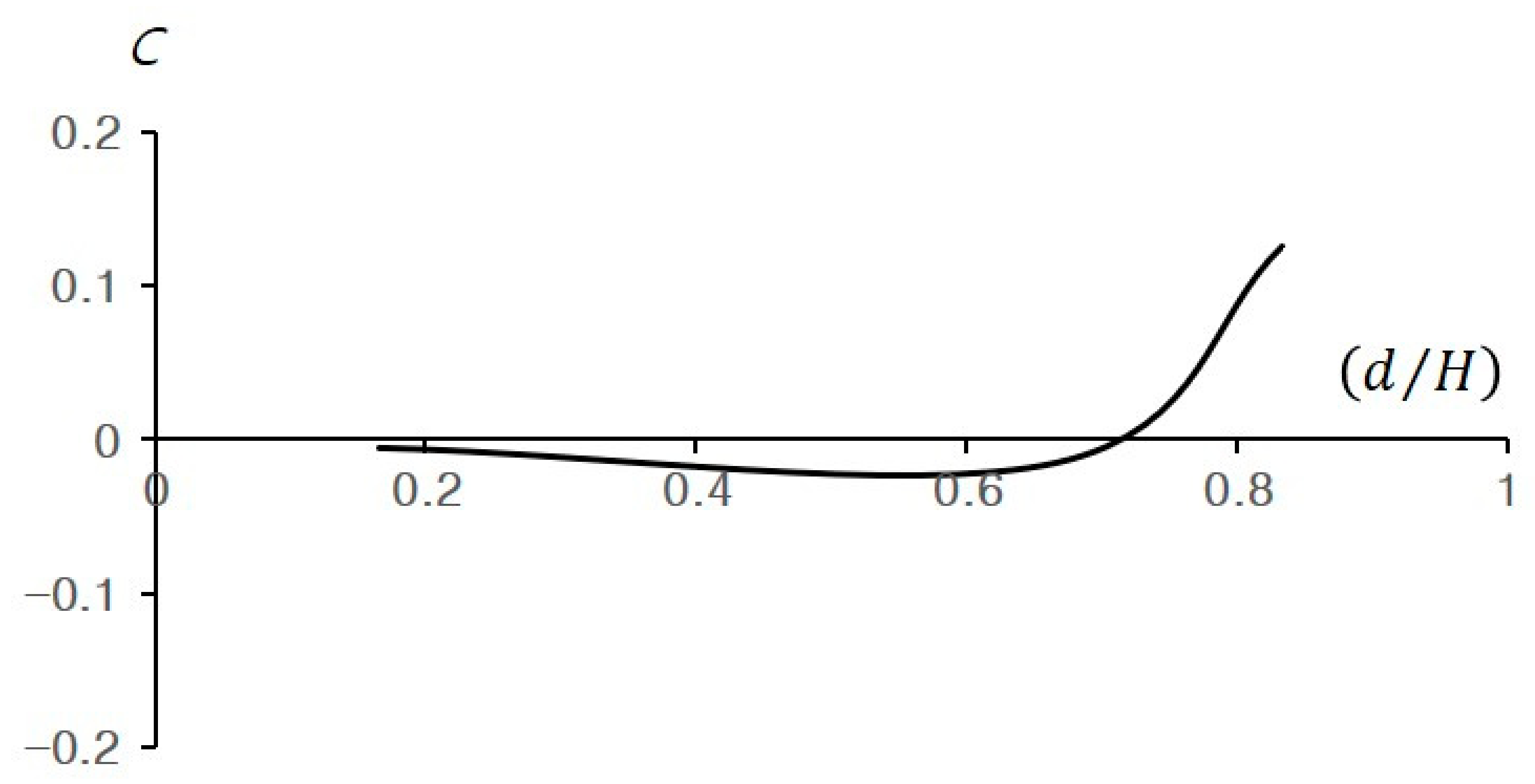
3.4. Discriminant for Course Stability
4. Maneuverability Prediction of a Fishing Trawler
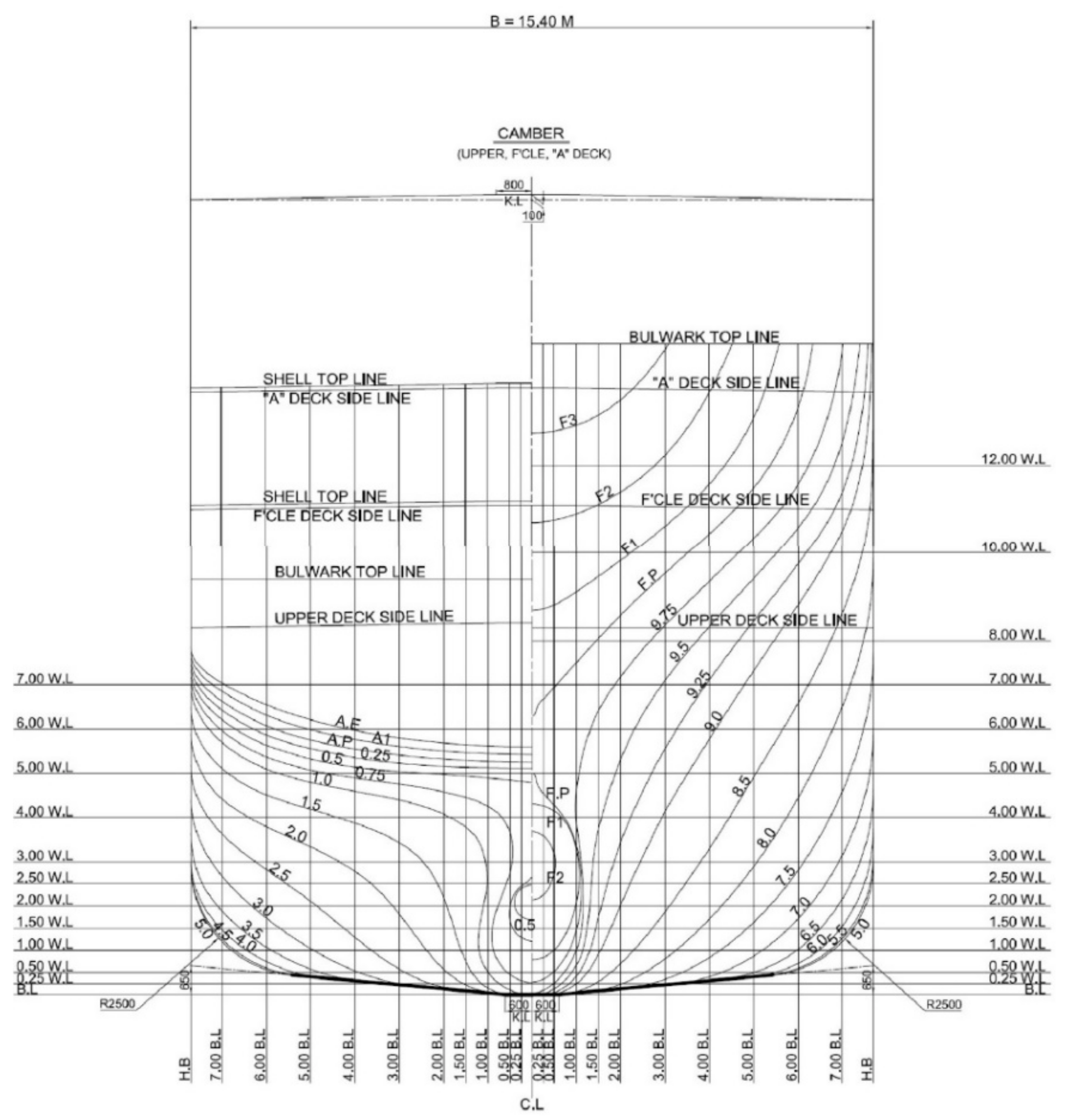
4.1. Target Fishing Vessel
4.2. Prediction of Maneuverability in Deep Water
4.2.1. Derivation of Maneuvering Hydrodynamic Coefficients
4.2.2. Conditions for Maneuverability Evaluation
- Deep, unrestricted water;
- Calm environment;
- Full load (summer load line draught, even keel condition);
- Steady approach at the test speed.
4.2.3. Results of Maneuverability Evaluation
4.3. Prediction of Maneuverability in Shallow Water
4.3.1. Derivation of Maneuvering Hydrodynamic Coefficients
4.3.2. Discriminant of Course Stability by Ship-Draft to Water-Depth Ratio
4.3.3. Conditions for Maneuverability Evaluation
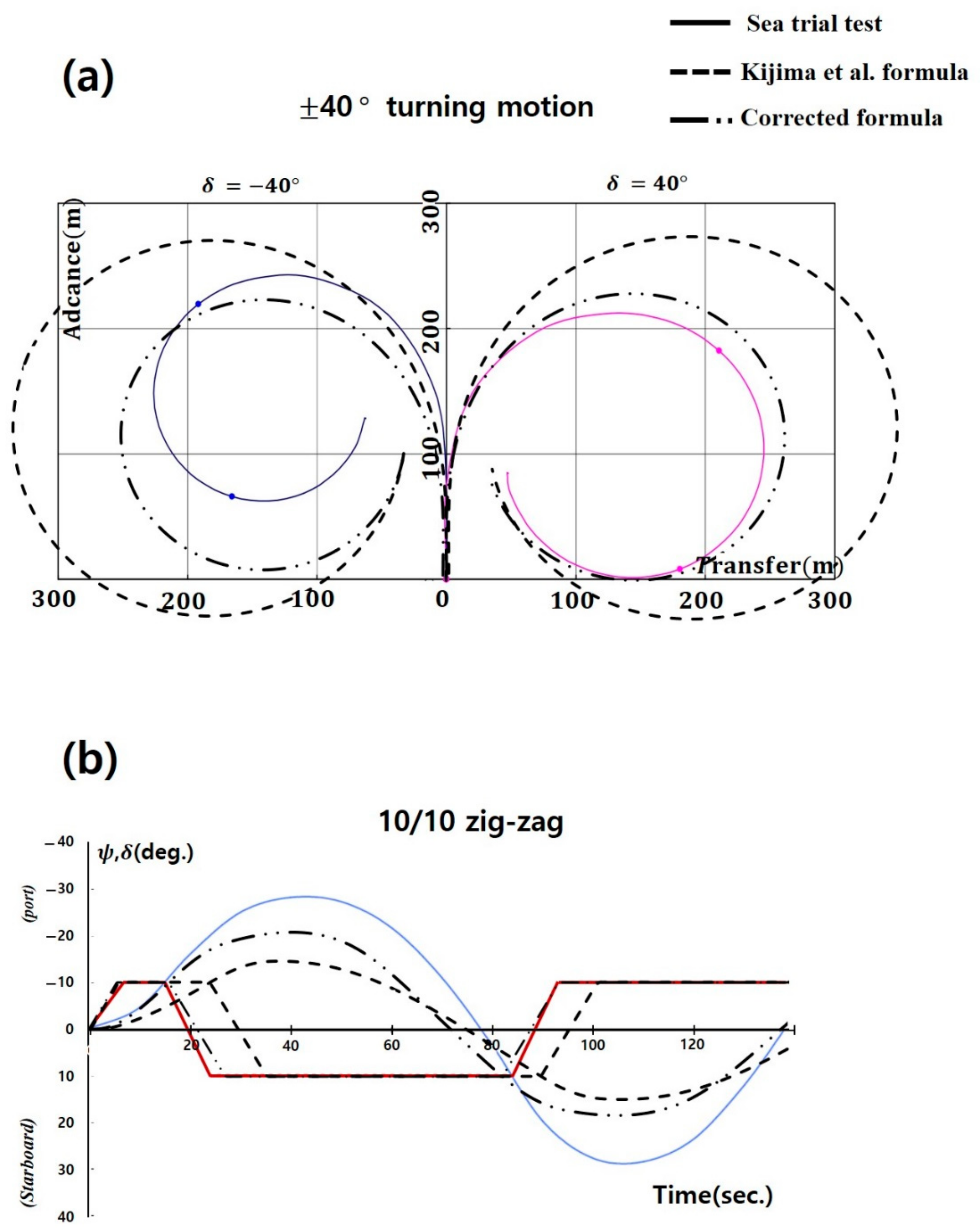
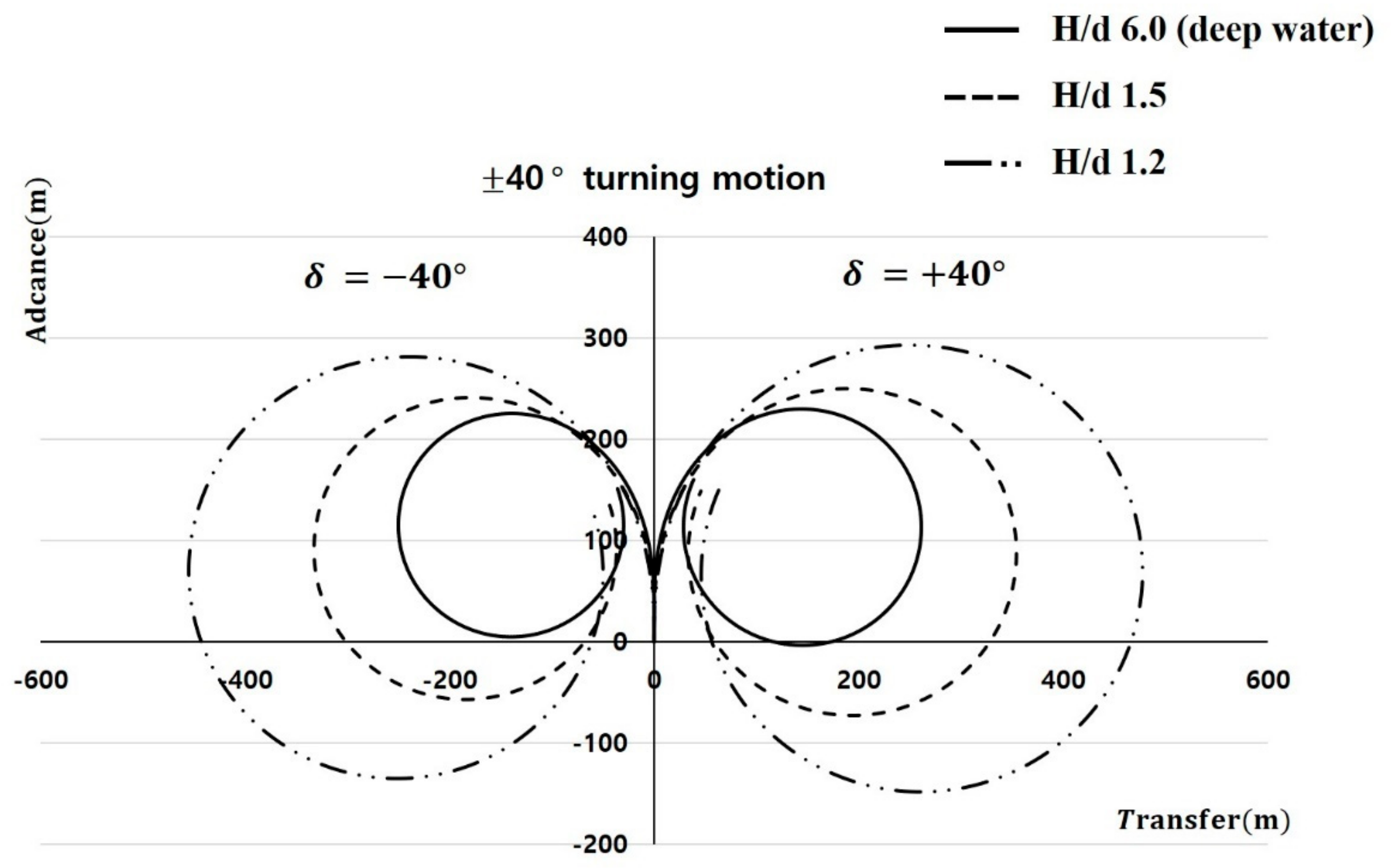
4.3.4. Simulation for Turning Motion
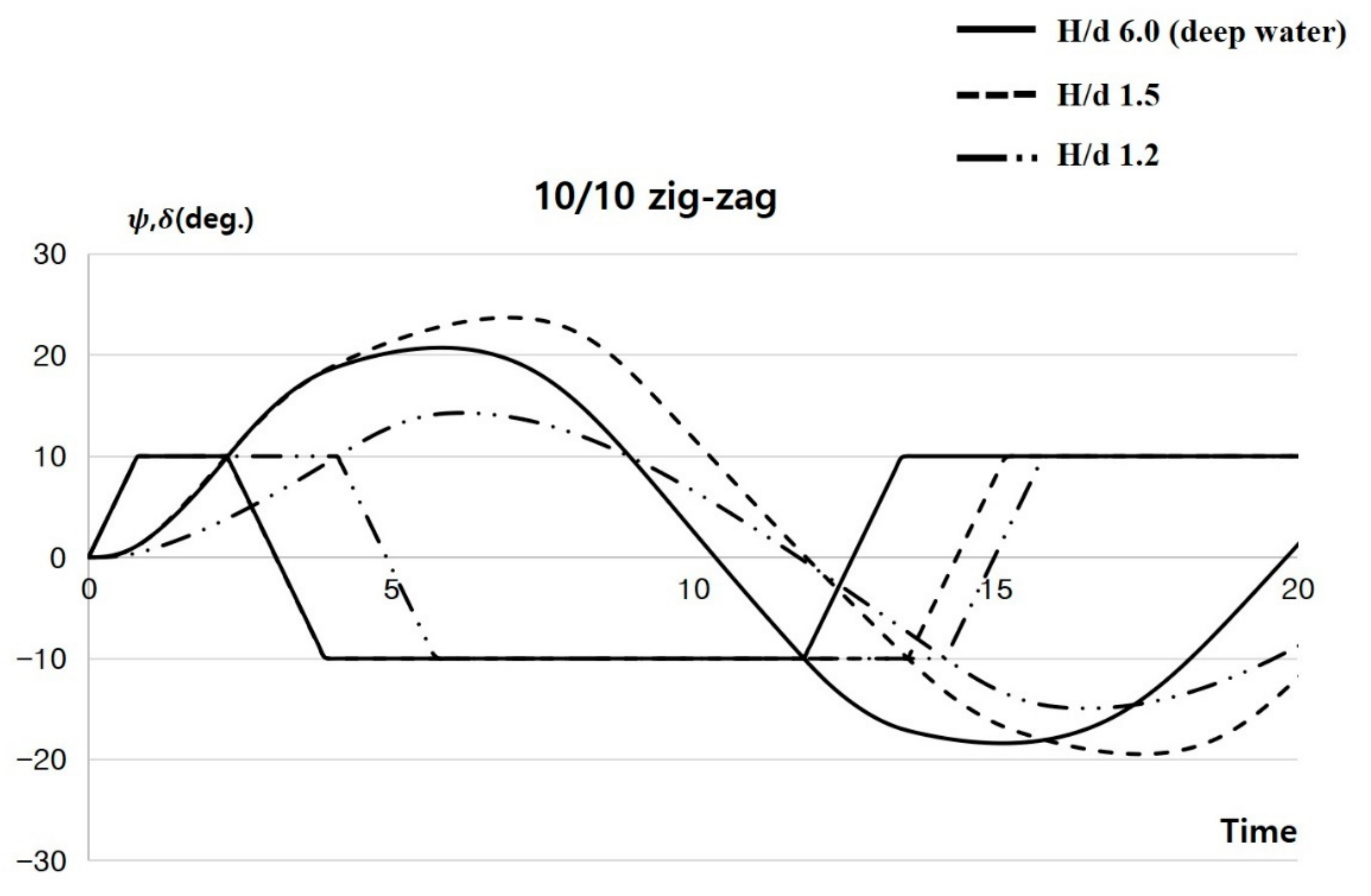
4.3.5. Simulation for 10/10 zig-zag
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| rudder area | |
| effective rudder inflow angle | |
| rudder force increase factor | |
| coefficient for starboard and port rudder, stability index | |
| rudder normal force gradient coefficient | |
| constants | |
| constants | |
| propeller diameter | |
| coefficients in the shallow water | |
| coefficients in the deep water | |
| normal force acting on the rudder/nondimensionalized | |
| correcting factor | |
| h | ship-draft to water-depth ratio |
| rudder height | |
| inertia moment of axis direction, added inertia moment/nondimensionalized | |
| advance coefficient | |
| aspect ratio of the rudder | |
| thrust coefficient | |
| mass of ship, added mass of x axis direction, added mass of y axis direction/nondimensionalized | |
| propeller revolution | |
| propeller revolution | |
| slip ratio | |
| thrust deduction coefficient in straight forward moving direction | |
| steering deduction factor | |
| resultant velocity, drift angle, rudder angle | |
| effective rudder inflow speed | |
| velocity components at the center of gravity of ship and yaw rate about z axis | |
| effective wake coefficient at the position of the propeller | |
| effective wake coefficient at the position of the rudder | |
| effective wake coefficient at the position of the propeller in straight forward moving direction | |
| effective wake coefficient at the position of the rudder in straight forward moving direction | |
| distance between C.G and the center of additional lateral force/nondimensionalized | |
| longitudinal coordinate of the position of the rudder/nondimensionalized | |
| effective inflow angle to the rudder in maneuvering motion/nondimensionalized | |
| rudder angle | |
| flow straightening coefficient | |
| effective wake fraction at the position of the propeller | |
| · (dot) | derivative with respect to time |
| ′ (prime) | nondimensionalized quantity |
References
- IMO MSC 76/23. “Standards for Ship Manoeuvrability” Report of the Maritime Safety Committee on Its 76th Session-Annex 6. Resolut. MSC 2002, 137, 1–6. [Google Scholar]
- Kim, S.H. A Study on the Improvement of the Accuracy of Fishing Vessels Manoeuvrability Prediction. Ph.D. Thesis, Korea Maritime and Ocean University, Busan, Korea, 2020. [Google Scholar]
- Lee, C.K.; Kim, S.H.; Lee, J.G.; Lee, S.M.; Kim, M.S. A Study on the Characteristics of Manoeuvrability of Fishing Vessel. J. Korean Soc. Fish. Ocean Technol. 2018, 54, 239–245. [Google Scholar] [CrossRef]
- Lee, C.K.; Kim, S.H.; Yim, J.B.; Lee, S.M. Study on the Maneuvering Characteristics of a Fishing Vessel in Shallow Water. Nav. Eng. J. 2019, 131, 95–104. [Google Scholar]
- Kim, S.H.; Lee, C.K. Estimation of Maneuverability of Trawl Fishing Vessel Using an Analytical Method. J. Mar. Sci. Eng. 2021, 9, 854. [Google Scholar] [CrossRef]
- Korea Maritime Safety Tribunal (KMST). Statistical Data of Maritime Accidents and Casualty. 2020. Available online: https://www.kmst.go.kr/kmst/statistics/annualReport/selectAnnualReportList.do (accessed on 10 August 2021).
- Lee, M.K.; Park, Y.S. Collision Prevention Algorithm for Fishing Vessels Using WAVE Communication. J. Mar. Sci. Eng. 2020, 8, 115. [Google Scholar] [CrossRef]
- Lee, M.K.; Park, Y.S.; Park, S.W.; Lee, E.K.; Park, M.J.; Kim, N.E. Application of Collision Warning Algorithm Alarm in Fishing Vessel’s Waterway. Appl. Sci. 2021, 11, 4479. [Google Scholar] [CrossRef]
- Mohamed, A.Z.; Abdulrahman, M.B. Occupational Safety and Health Conditions Aboard Small- and Medium-Size Fishing Vessels: Differences among Age Groups. Int. J. Environ. Res. Public Health 2017, 14, 229. [Google Scholar] [CrossRef]
- Rasmussen, H.B.; Ahsan, D. Injuries and Fatalities in Danish Commercial Fishing Fleet in 1998–2016. Safety 2018, 4, 13. [Google Scholar] [CrossRef]
- Alvite-Castro, J.; José, A.O.; Vergara, D.; Ángel, M.C.; Bouzón, R. A New Design Criterion to Improve the Intact Stability of Galician Small Fishing Vessels. J. Mar. Sci. Eng. 2020, 8, 499. [Google Scholar] [CrossRef]
- Kim, S.H.; Kim, H.S.; Lee, Y.W. The Causes and Counterplan for Marine Casualties of Fishing Vessels According to the Fishing Types. J. Korean Soc. Fish. Ocean Technol. 2020, 56, 246–257. [Google Scholar] [CrossRef]
- Jung, C.H. A Study on the Improvement of Safety by Accidents Analysis of Fishing Vessels. J. Fish. Mar. Sci. Educ. 2018, 30, 179–186. [Google Scholar]
- Yoshimura, Y.; Ma, N.; Suzuki, S.; Kajiwara, Y. Manoeuvring Performance of the Fishing vessel Modified by a Bulge. J. Soc. Nav. Archit. Jpn. 2002, 192, 37–46. [Google Scholar] [CrossRef]
- Yoshimura, Y.; Ma, N. Manoeuvring Prediction of Fishing vessel. In MARSIM 03’Conference Proceedings; RC-29-1-10; The Society of Naval Architects of Japan, Japan Institute of Navigation and International Marine Simulator Forum: Kanazawa, Japan, 2003. [Google Scholar]
- Yoshimura, Y.; Masumoto, Y. Hydrodynamic Force with Medium High Speed Merchant Ships Including Fishing Vessels and Investigation into a Manoeuvring Prediction Method. J. Jpn. Soc. Nav. Archit. Ocean Eng. 2011, 14, 63–73. [Google Scholar] [CrossRef]
- Yoshimura, Y.; Yasukawa, H. Introduction of MMG Standard Method for Ship Maneuvering Predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef]
- Obreja, D.; Nabergoj, R.; Crudu, L.; Păcuraru-Popoiu, S. Identification of hydrodynamic coefficients for manoeuvring simulation model of a fishing vessel. Ocean Eng. 2010, 37, 678–687. [Google Scholar] [CrossRef]
- Lee, C.K.; Kim, S.H.; Lee, S.M.; Yim, J.B. Study on the Manoeuvring prediction of a fishing vessel. Nav. Eng. J. 2019, 131–134, 101–109. [Google Scholar]
- Kim, S.H.; Lee, C.K.; Lee, S.M. Estimation of Maneuverability of Fishing Vessel Considering Hull-Form Characteristics. J. Mar. Sci. Eng. 2021, 9, 569. [Google Scholar] [CrossRef]
- Kim, K.Y. Manoeuverabilities of the M.S “SAEBADA”. J. Korean Soc. Fish. Ocean Technol. 1979, 12, 209–215. [Google Scholar]
- Kim, M.S.; Shin, H.O.; Kang, K.M.; Kim, M.S. Variation of Turning Circle by the Rudder Angle and the Ship’s Speed. J. Korean Soc. Fish. Ocean Technol. 2005, 41, 156–164. [Google Scholar] [CrossRef]
- Ahn, Y.H.; Park, M.H.; Choi, C.M.; Chung, Y.J. A Study on the Maneuverabilities of the Training ship M.S. A-RA. J. Korean Soc. Fish. Ocean Technol. 2001, 37, 275–284. [Google Scholar]
- An, Y.S.; Kang, I.K.; Kim, H.S.; Kim, J.C.; Kim, M.S.; Jo, H.J.; Lee, C.K. A Study on the Manoeuvrability of T/S SAEBADA by Real sea trials. J. Korean Soc. Fish. Ocean Technol. 2005, 41, 289–295. [Google Scholar] [CrossRef][Green Version]
- Kim, M.S.; Shin, H.I.; Kim, J.H.; Kang, I.K. A Study on the Maneuverabilities of the T.S KAYA. J. Fish. Mar. Sci. Educ. 2009, 21, 59–67. [Google Scholar]
- Huang, J.; Xu, C.; Xin, P.; Zhou, X.; Sutulo, S.; Soares, C.G. A Fast Algorithm for the Prediction of Ship-Bank Interaction in Shallow Water. J. Mar. Sci. Eng. 2020, 8, 927. [Google Scholar] [CrossRef]
- Hong, C.B.; Lee, S.M. A Study on Barge-Bank Interaction Forces Considering the Reflected Waves. J. Mar. Sci. Eng. 2020, 8, 451. [Google Scholar] [CrossRef]
- Ogawa, A.; Koyama, T.; Kijima, K. MMG report-I, on the Mathematical Model of Ship Manoeuvring. Bull. Soc. Nav. Archit. Jpn. 1977, 575, 22–28. [Google Scholar]
- Kijima, K.; Katsuno, T.; Nakiri, Y.; Furukawa, Y. On the Manoeuvring Performance of a Ship with the Parameter of Loading Condition. J. Soc. Nav. Archit. Jpn. 1990, 168, 141–148. [Google Scholar] [CrossRef]
- Kobayashi, E.; Kagemoto, H.; Furukawa, Y. Mathematical Models of Ship Manoeuvring Motion; Chapter 2 of Research on Ship Manoeuvrability and Its Application to Ship Design. In Proceedings of the 12th Marine Dynamic Symposium, Japan, Tokyo, 11–12 December 1995; pp. 23–90. [Google Scholar]
- Kijima, K.; Nakiri, Y. Approximate Expression for Hydrodynamic Derivatives of Ship Manoeuvring Motion Taking into Account of the Effect of Stern Shape. Trans. West Jpn. Soc. Nav. Arch. 1999, 98, 67–77. [Google Scholar]
- Kijima, K.; Nakiri, Y. On the Practical Prediction Method for Ship Manoeuvring Characteristics. Trans. West Jpn. Soc. Nav. Arch. 2003, 105, 21–31. [Google Scholar]
- Kijima, K.; Nakiri, Y. On the Practical Prediction Method for Ship Manoeuvrability in Restricted Water. Trans. West Jpn. Soc. Nav. Arch. 2004, 107, 37–54. [Google Scholar]
- Xu, H.; Hassani, V.; Soares, C.G. Uncertainty analysis of the hydrodynamic coefficients estimation of a nonlinear manoeuvring model based on planar motion mechanism tests. Ocean Eng. 2019, 173, 450–459. [Google Scholar] [CrossRef]
- Hinostroza, M.A.; Xu, H.T.; Soares, C.G. Manoeuvring test for a self-running ship model in various water depth conditions. In Sustainable Development and Innovations in Marine Technologies; Soares, G.G., Ed.; Taylor & Francis Group: London, UK, 2019; pp. 187–196. [Google Scholar]
- Hinostroza, M.A.; Xu, H.T.; Soares, C.G. Modified Vector Field Path-Following Control System for an Underactuated Autonomous Surface Ship Model in the Presence of Static Obstacles. J. Mar. Sci. Eng. 2021, 9, 652. [Google Scholar]
- Dae Sun Shipbuilding & Engineering Co., Ltd. Result of Sea Trial Test. 2020. [Google Scholar]
- Yoon, J.D. Theory and Practice of Ship Manoeuvring; Sejong Publishing, Co.: Busan, Korea, 2019. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Ship | Name of Ship | ||||||
|---|---|---|---|---|---|---|---|
| Fishing vessel | F (A), trawler | 0.607 | 0.1408 | 5.208 | 2.727 | 0.3930 | 0.1165 |
| F (B), trawler | 0.616 | 0.1485 | 4.927 | 2.733 | 0.3840 | 0.1250 | |
| F (C), trawler | 0.574 | 0.1379 | 5.492 | 2.640 | 0.4260 | 0.1045 | |
| F (D), trawler | 0.5872 | 0.1223 | 5.667 | 2.885 | 0.4128 | 0.1036 | |
| F (E), trawler | 0.5923 | 0.1247 | 5.520 | 2.905 | 0.4077 | 0.1073 | |
| Merchant ship | M (A), VLCC | 0.802 | 0.1256 | 5.734 | 2.777 | 0.1980 | 0.1399 |
| M (B), VLCC | 0.831 | 0.1360 | 6.127 | 2.400 | 0.1690 | 0.1356 | |
| M (C), ULCC | 0.835 | 0.1248 | 5.365 | 2.987 | 0.1650 | 0.1556 | |
| M (D), ULCC | 0.821 | 0.1464 | 4.505 | 3.033 | 0.1790 | 0.1823 | |
| M (E), ULCC | 0.820 | 0.1464 | 5.000 | 2.732 | 0.1800 | 0.1640 | |
| M (F), Cargo | 0.773 | 0.1368 | 6.127 | 2.386 | 0.2270 | 0.1262 | |
| M (G), Cargo | 0.698 | 0.1120 | 5.967 | 2.993 | 0.3020 | 0.1170 | |
| M (H), Cargo | 0.651 | 0.1264 | 6.649 | 2.380 | 0.3490 | 0.0979 | |
| M (I), Container | 0.5717 | 0.1086 | 6.897 | 2.670 | 0.4283 | 0.0829 | |
| M (J), Container | 0.566 | 0.1040 | 6.477 | 2.969 | 0.4340 | 0.0874 | |
| M (K), RO/RO | 0.557 | 0.0816 | 6.812 | 3.598 | 0.4430 | 0.0818 | |
| M (L), Car carrier | 0.522 | 0.1072 | 5.187 | 3.597 | 0.4780 | 0.1006 | |
| M (M), LNG | 0.714 | 0.0800 | 6.112 | 4.090 | 0.2860 | 0.1168 |
| Type of Ship | Name of Ship | ||||
|---|---|---|---|---|---|
| Fishing vessel | F (A) | 0.3842 | −0.1748 | 0.1408 | −0.0562 |
| F (B) | 0.4082 | −0.1875 | 0.1485 | −0.0581 | |
| F (C) | 0.3629 | −0.1568 | 0.1379 | −0.0555 | |
| F (D) | 0.3371 | −0.1554 | 0.1223 | −0.0511 | |
| F (E) | 0.3461 | −0.1610 | 0.1247 | −0.0518 | |
| Merchant ship | M (A) | 0.3930 | −0.2098 | 0.1256 | −0.0520 |
| M (B) | 0.3914 | −0.1892 | 0.1368 | −0.0552 | |
| M (C) | 0.2866 | −0.1243 | 0.1086 | −0.0469 | |
| M (D) | 0.3092 | −0.1510 | 0.1072 | −0.0464 | |
| M (E) | 0.3396 | −0.1755 | 0.1120 | −0.0479 | |
| M (F) | 0.4138 | −0.2335 | 0.1248 | −0.0518 | |
| M (G) | 0.2891 | −0.1752 | 0.0800 | −0.0368 | |
| M (H) | 0.2856 | −0.1311 | 0.1040 | −0.0453 | |
| M (I) | 0.3355 | −0.1469 | 0.1264 | −0.0523 | |
| M (J) | 0.2426 | −0.1227 | 0.0816 | −0.0374 | |
| M (K) | 0.4850 | −0.2734 | 0.1464 | −0.0576 | |
| M (L) | 0.4034 | −0.2034 | 0.1360 | −0.0549 | |
| M (M) | 0.4594 | −0.2460 | 0.1464 | −0.0576 |
| Name of Ship | ||||
|---|---|---|---|---|
| F(A) | 0.3300 | −0.2026 | 0.1193 | −0.0498 |
| F(B) | 0.3261 | −0.2148 | 0.1199 | −0.0497 |
| F\(C) | 0.3267 | −0.1903 | 0.1180 | −0.0497 |
| F(D) | 0.3341 | −0.1828 | 0.1147 | −0.0499 |
| F(E) | 0.3325 | −0.1891 | 0.1148 | −0.0499 |
| Hull | 85.0 | |
| 15.4 | ||
| 5.3 | ||
| 0.592 | ||
| Rudder | 7.631 | |
| Max. (deg.) | 45.0 | |
| Propeller | Rotation direction | Right |
| No. of blades | 4 | |
| 3.8 |
| Linear HydrodyNamic Coefficients | Kijima et al. Formula | Corrected Formula |
|---|---|---|
| 0.3461 | 0.3325 | |
| −0.1610 | −0.1891 | |
| 0.1247 | 0.1148 | |
| −0.0518 | −0.0499 |
| Turning Motion | 10/10 zig-zag | |||
|---|---|---|---|---|
| Actual Ship | Simulations | Actual Ship | Simulations | |
| Wind direction (deg, Relative) & Speed (m/s) | port: 205, 3.8 st’bd: 206, 4.1 | calm | 341, 7.0 | calm |
| Water depth (m) | approx. 130 | approx. 130 | ||
| Ship draft (m) | fwd: 5.18 aft: 5.28 | fwd: 5.3 aft: 5.3 | fwd: 5.18 aft: 5.28 | fwd: 5.3 Aft: 5.3 |
| Test speed (kts) | port: 14.2 st’bd: 14.52 | port: 14.04 st’bd: 14.04 | both 14.81 | both 14.04 |
| Scale | Rudder Area Ratio | Remark | ||||
|---|---|---|---|---|---|---|
| F(A) | 1/20.833 | 3.0 | 0.576 | 0.016 | 1/39.3 | |
| F(B) | 1/20.2 | 3.0 | 0.609 | 0.019 | 1/34.6 | |
| F(C) | 1/24.167 | 3.0 | 0.546 | 0.016 | 1/38.2 | |
| F(D) | 1/28.333 | 3.0 | 0.529 | 0.009 | 1/63.1 | |
| F(E) | 1/28.333 | 3.0 | 0.544 | 0.010 | 1/59.0 | Target fishing vessel |
| Deep Water | Shallow Water | ||
|---|---|---|---|
| H/d 6.0 h (=d/H 0.1666) | H/d 1.5 h (=d/H 0.6666) | H/d 1.2 h (=d/H 0.8333) | |
| 0.3325 | 0.4865 | 0.8640 | |
| −0.1891 | −0.2701 | 0.0797 | |
| 0.1148 | 0.1799 | 0.3300 | |
| −0.0499 | −0.0642 | −0.1071 | |
| −0.0051 | −0.0173 | 0.0657 | |
| Turning Motion | 10/10 zig-zag | |
| Wind direction (deg, Relative) & Speed (m/s) | calm | |
| Water depth | ||
| Ship draft (m) | fwd: 5.3 aft: 5.3 | fwd: 5.3 aft: 5.3 |
| Test speed (kts) | port: 14.04 st’bd: 14.04 | port: 14.04 st’bd: 14.04 |
| Deep Water | ShallowWater | IMO Criteria | |||
| H/d 6.0 h (=d/H 0.1666) | H/d 1.5 h (=d/H 0.6666) | H/d 1.2 h (=d/H 0.8333) | (Deep Water) | ||
| Advance (m) | port | 224 (2.6 L) | 237 (2.8 L) | 281 (3.3 L) | (4.5 L) |
| st’bd | 229 (2.7 L) | 246 (2.9 L) | 292 (3.4 L) | ||
| mean | 227 (2.7 L) | 242 (2.8 L) | 287 (3.4 L) | ||
| Tac. Dia. (m) | port | 250 (2.9 L) | 332 (3.9 L) | 448 (5.3 L) | (5.0 L) |
| st’bd | 260 (3.0 L) | 353 (4.2 L) | 467 (5.5 L) | ||
| mean | 255 (3.0 L) | 343 (4.0 L) | 458 (5.4 L) | ||
| Deep Water | Shallow Water | IMO Criteria | ||
|---|---|---|---|---|
| H/d 6.0h (=d/H 0.1666) | H/d 1.5h (=d/H 0.6666) | H/d 1.2h (=d/H 0.8333) | (Deep Water) | |
| L/V (sec.) | 11.8 | 11.8 | 11.8 | |
| 1st over shoot angle (deg.) | 10.7 | 13.7 | 4.3 | (5 + 1/2(L/V)) |
| 2nd over shoot angle (deg.) | 8.4 | 9.4 | 4.9 | (17.5 + 0.75(L/V)) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-H.; Lee, C.-K.; Chae, Y.-B. Prediction of Maneuverability in Shallow Water of Fishing Trawler by Using Empirical Formula. J. Mar. Sci. Eng. 2021, 9, 1392. https://doi.org/10.3390/jmse9121392
Kim S-H, Lee C-K, Chae Y-B. Prediction of Maneuverability in Shallow Water of Fishing Trawler by Using Empirical Formula. Journal of Marine Science and Engineering. 2021; 9(12):1392. https://doi.org/10.3390/jmse9121392
Chicago/Turabian StyleKim, Su-Hyung, Chun-Ki Lee, and Yang-Bum Chae. 2021. "Prediction of Maneuverability in Shallow Water of Fishing Trawler by Using Empirical Formula" Journal of Marine Science and Engineering 9, no. 12: 1392. https://doi.org/10.3390/jmse9121392
APA StyleKim, S.-H., Lee, C.-K., & Chae, Y.-B. (2021). Prediction of Maneuverability in Shallow Water of Fishing Trawler by Using Empirical Formula. Journal of Marine Science and Engineering, 9(12), 1392. https://doi.org/10.3390/jmse9121392