1. Introduction
With the continuous increase in ship size, ship design speed, and navigation environment complexity, the risk of maritime traffic safety continues to increase. Marine transport is a relatively safe mode of transport. Despite the safety standards and advanced technology constantly improving, maritime transport accidents continue to occur [
1]. According to the literature, the maritime industry loses approximately
$541 million due to human error each year [
2]. According to EMSA data [
3], there were 20,616 marine accidents from 2011 to 2017. As a result of these accidents, a total of 203 ships sank or became unserviceable, 6812 seafarers were injured, and 683 crew members were killed. In all these accidents, human factors dominate, and accident losses caused by human factors account for 75–96% of marine accidents [
4]. Maritime accidents are also closely related to the development of the region. Take China as an example. According to statistics, in 2020, a total of 138 maritime traffic accidents (grade accidents) occurred in China, an increase of 0.7% over the previous year. The number of deaths and missing persons caused by accident was 196, an increase of 26.5% over the previous year. A total of 76 ships sank in accidents, an increase of 65.2% over the last year [
5]. Marine accidents endanger not only the safety of persons and property, but also the local marine environment and marine traffic.
In all of these water traffic accidents, ship collision accidents account for a large proportion [
4,
5,
6]. At present, many scholars have conducted research and analysis on the causes of collision accidents. According to these studies, the leading causes of collision accidents can be summarized as follows: negligence of lookout, ineffective use of bridge navigation equipment, violation of International Regulations for Preventing Collisions at Sea, poor visibility, heavy traffic, darkness, and communication and coordination errors between ships and bridge team members [
7].
Ship collision accidents usually cause significant damages to human life, goods, and ships. For the ship itself, a collision accident may cause serious hull damage. The damage degree of a ship collision is affected by many factors, such as the collided ship’s position, the colliding ship’s speed, and the collision angle. After the collision, the ship may be in three states: capsizing rapidly, sinking slowly, or remaining afloat due to its stability and buoyancy changes. As for oil tankers and hazardous chemicals ships, after a collision accident, a large-scale leak of oil or other hazardous chemicals may cause serious pollution to the environment and bring substantial economic consequences [
8]. In addition, the strength of the struck ship’s hull may be reduced due to damage. Hull girder collapses may occur when the hull’s maximum residual load-carrying capacity is insufficient to sustain the corresponding hull girder loads applied. In this case, the struck ships will bear all the losses [
9,
10]. It is not just that the hull may be damaged when an accident occurs. If the struck ship still stays afloat after the collision, it needs to be towed to the salvage harbor to be repaired as fast as possible. There is a possibility that the initial damage caused by collision or grounding will further propagate during ship salvage operations due to the fluctuating wave loads [
11]. The aggravation of its damage is often affected by ship age and corrosion. The reason for this is that corrosion wastage has a more significant influence on structural safety compared to the load effects of the sudden collision damage [
11,
12]. In summary, ship sinking may occur after a ship collision. This will pose a significant threat to the security of marine navigation of other ships crossing the area. Accurately evaluating the collision emergency situation and predicting the possible future evolution of the situation is of great guiding significance for formulating appropriate emergency measures.
The purpose of research on marine accidents is to avoid marine accidents. The research on maritime collision accidents is often carried out from three aspects: prevention and avoidance before the accident, emergency plan formulation and rescue after the accident, and accident analysis after the accident. With the development of electronic technology, many scholars have studied collision avoidance algorithms from the perspective of assisted driving to assist drivers in avoiding ship collision accidents [
13]. Some scholars also assess the potential risks of navigation to prevent future accidents. In [
4], the effects of human factor-related errors associated with the use of the bridge’s electronic navigational devices on grounding and collision-contact accidents were investigated. In [
6], the authors propose using the Human Factor Analysis and Classification System (HFACS) and Bayesian network models to analyze maritime accidents, and an accident network is established to allow users to assess the accident risk of variable conditions. The article proposes suggestions to reduce these factors to further prevent the occurrence of maritime accidents. In [
1], the Human Factor Analysis and Classification System for Passenger Vessel collisions (HFACS-PV) structure is used for accident analysis of contact, grounding, and collision accidents to more clearly and consistently identify the human and organizational factors in marine accidents. Another study [
14] explores the influencing factors of accident consequences from the accident report through statistical analysis. Further, [
15] uses the Bayesian network model to analyze the internal laws of ship collision accidents’ occurrence, development, and final results. In [
16], a situation model of ship collision accidents is established by a cross-layer adaptive particle swarm optimization algorithm, and the complex relationship among influencing factors of ship collision accidents are studied. Previous studies have well analyzed the cause of accidents and the possible consequences after an accident, which positively impacts on the prevention of accidents. However, from the perspective of emergency assistance, a method is needed to assess the current situation risk when a collision occurs to assist rescuers in better formulating rescue plans.
The purpose of this paper is to establish an evaluation model for emergency situation safety after collisions of ships by comprehensively considering the situation influencing factors of the emergency scene. Due to the fuzziness and uncertainty of the situation level boundary of the emergency scene after the collision of ships, it is difficult to reflect the fuzziness and uncertainty in the evaluation process by using the traditional safety evaluation method. The extension cloud model is a comprehensive evaluation method that combines qualitative and quantitative description by introducing the cloud model into matter-element theory. At the same time, the cloud model can consider the fuzziness and uncertainty of the evaluation indicators. In the aspect of extension cloud application research, Wang Zhihe et al. [
17] proposed a regional ecological security early warning model based on the extension cloud model, considering the randomness, fuzziness, and dynamics of the boundary information ecological security level. The model was used to quantitatively assess the ecological security of the Zhangye section of Qilian Mountain Glacier and the water conservation ecological function area from 2005 to 2015. The results showed that the extension cloud model can consider the fuzziness and uncertainty of the evaluation indicators, and can well integrate the evaluation results of multiple evaluation indicators. Wang Feng et al. [
18] introduced the extension cloud model into the network security situation evaluation of the automated command system (C4ISR), and the example analysis results showed that this method could be applied to the network security situation evaluation considering the randomness and fuzziness of the value of qualitative evaluation indicators. Lu Feng [
19] et al. constructed a mooring safety evaluation model based on normal cloud extension theory to solve the problem that traditional mooring safety evaluation methods did not consider the uncertainty and fuzziness of evaluation level boundaries. Li Ruqi et al. [
20] established a standard cloud matter-element model for the comprehensive power quality evaluation. The extension cloud model has been widely used in safety evaluation. Given that the extension cloud model has the characteristics of cloud model uncertain reasoning and the advantages of the matter-element extension model with qualitative and quantitative analysis, this paper introduces the extension cloud model into the situation evaluation after the collision of ships at sea.
The main contributions can be summarized as follows:
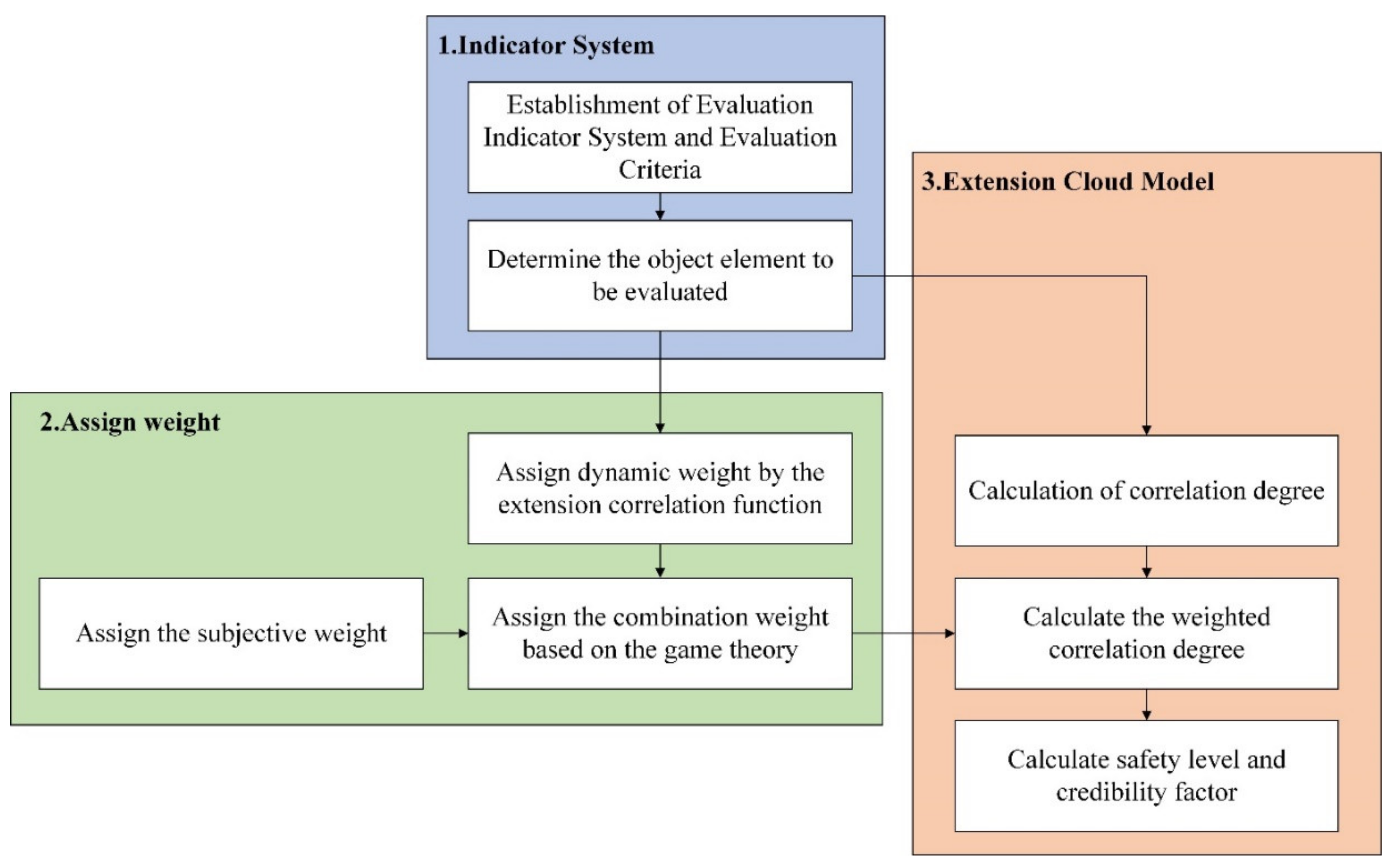
In this paper, the extension cloud model, which has the advantages of the cloud model and matter-element extension model, innovatively applies to the assessment of the emergency situation safety level after marine ship collision accidents. In this process, this paper constructs an evaluation indicator system for the emergency situation safety rating of marine collision accidents based on the ship–environment–rescue logic model, thereby ensuring the comprehensiveness of the evaluation results. According to this evaluation system, this paper uses the extension cloud model to evaluate the risk level. The entropy and super entropy in the extension cloud model can express the ambiguity and randomness in the evaluation process. This paper uses the game theory method to combine and optimize the subjective weights obtained by the analytic hierarchy process, the dynamic weights obtained from the extension correlation function, and obtain the comprehensive weights of each indicator in the emergency situation security level assessment. The model in this paper is verified through two real accident cases published by the China Maritime Safety Administration, and the results prove that the method in this paper can accurately and reasonably assess the safety posture of a ship after a collision. The model framework established in this paper is shown in
Figure 1. All parts of the model are described in detail in subsequent sections of this article.
2. Methodology
2.1. Cloud Model
The cloud model expresses the randomness and ambiguity in objective things or human knowledge through a unified mathematical expression, reflecting the universal law of objective phenomena with randomness and ambiguity [
21,
22]. The cloud model mainly includes the normal cloud model, triangular cloud model, and symmetric cloud model. The normal cloud model is the most important and widely used. The general applicability of the normal cloud model has been proven [
23,
24,
25]. The normal cloud model embodies its numerical characteristics by the expected value
, entropy
, and hyper-entropy
. The expected value
is the centre of the cloud of the cloud diagram, and it is also the point which best represents the qualitative concept of things. The situational safety after collisions at sea is based on this value. The entropy
describes the uncertainty of things, which is determined by the randomness and ambiguity of things. It can not only reflect the randomness of the situational safety evaluation indicator value, it can also reflect the fuzziness of the data of the object to be evaluated in the situational safety level; the hyper-entropy
is the uncertainty measure of the entropy
, it represents the degree of correlation between randomness and ambiguity of various factors that affect situational security. To weaken the randomness and fuzziness in the process of the situation security evaluation, the expected value
, entropy
, and hyper-entropy
are used to construct the situational security level boundary and the cloud correlation function.
2.2. Extension Evaluation Method
The extension evaluation method is an evaluation method developed by relying on the extension theory found by Professor Cai Wen. It introduces the matter element, namely the triplet
= (thing, feature, value) =
to describe the basic elements of things, where
represents the thing,
represents the name of the feature of the thing, and
represents the measurement value of the feature
of the thing
[
26]. For example, if the matter element R expresses the information related to the collision situation to be evaluated, the matter element to be evaluated is expressed by Equation (1):
where
is the matter element to be evaluated,
is the emergency situation after collisions at sea to be evaluated, and
is the data of the
i-th indicator
related to the safety of the collision situation to be evaluated.
The Classic Domain is the standard interval classification of each level for the indicators. The Classic Domain of the emergency situation after collisions at sea is expressed in Equation (2):
In Equation (2), represents the n-dimensional emergency situation matter element model of the j-th level. represents the emergency situation state level, j = 1, 2, 3, 4, 5; represents the evaluation indicator; represents the value range of the indicator .
2.3. Extension Cloud Model
The extension cloud model is a combination of extension evaluation and the cloud model. Replace
in
= (thing, feature, value) =
in extension evaluation with the normal cloud model (
,
,
). Then, the fuzziness of the situational security level boundary is represented by
, and
represents the randomness of the situational security evaluation indicators data. The improved extension matter-element model is expressed as Equation (3):
2.4. Establishment of Evaluation Indicator System and Evaluation Criteria for the Emergency Situation after Collisions at Sea
After the ship collision accident occurs, the emergency situation at the emergency scene is complicated, therefore the situation of the emergency scene is the result of multiple factors. Analyzing the rules and influencing factors of the emergency situation in ship collision accidents, then extracting reasonable situation elements is the premise to construct the indicator system for situation analysis after collisions at sea.
The construction of the indicator system is not composed of several indicators randomly piled up, but needs to follow a logical framework to which a specific indicator is attached [
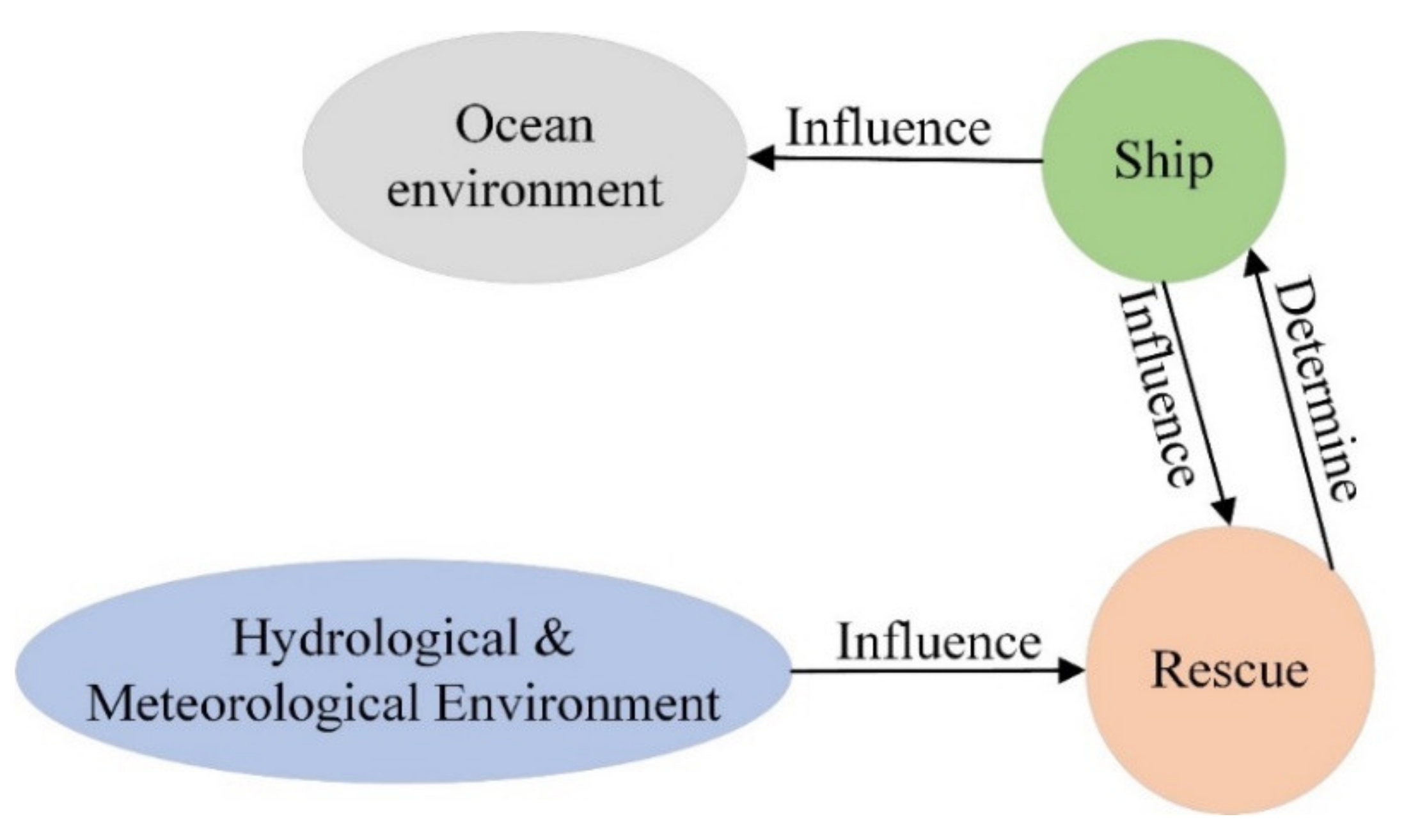
27]. This article constructs the safety situation assessment indicator system after a ship collision accident from the three aspects of ship, environment, and rescue. The ship–environmental–rescue logic model is shown in
Figure 2.
In the actual emergency rescue process at sea, the hydrometeorological environment and ship damage status affect the difficulty of rescue, and the difficulty of rescue determines whether the wrecked ship is rescued. The damage state of the ship will affect the marine ecological environment and navigation environment on the scene, resulting in increased loss and difficulty in rescue. Based on the above logic, this paper constructs a situational safety evaluation indicator system after a ship collision accident.
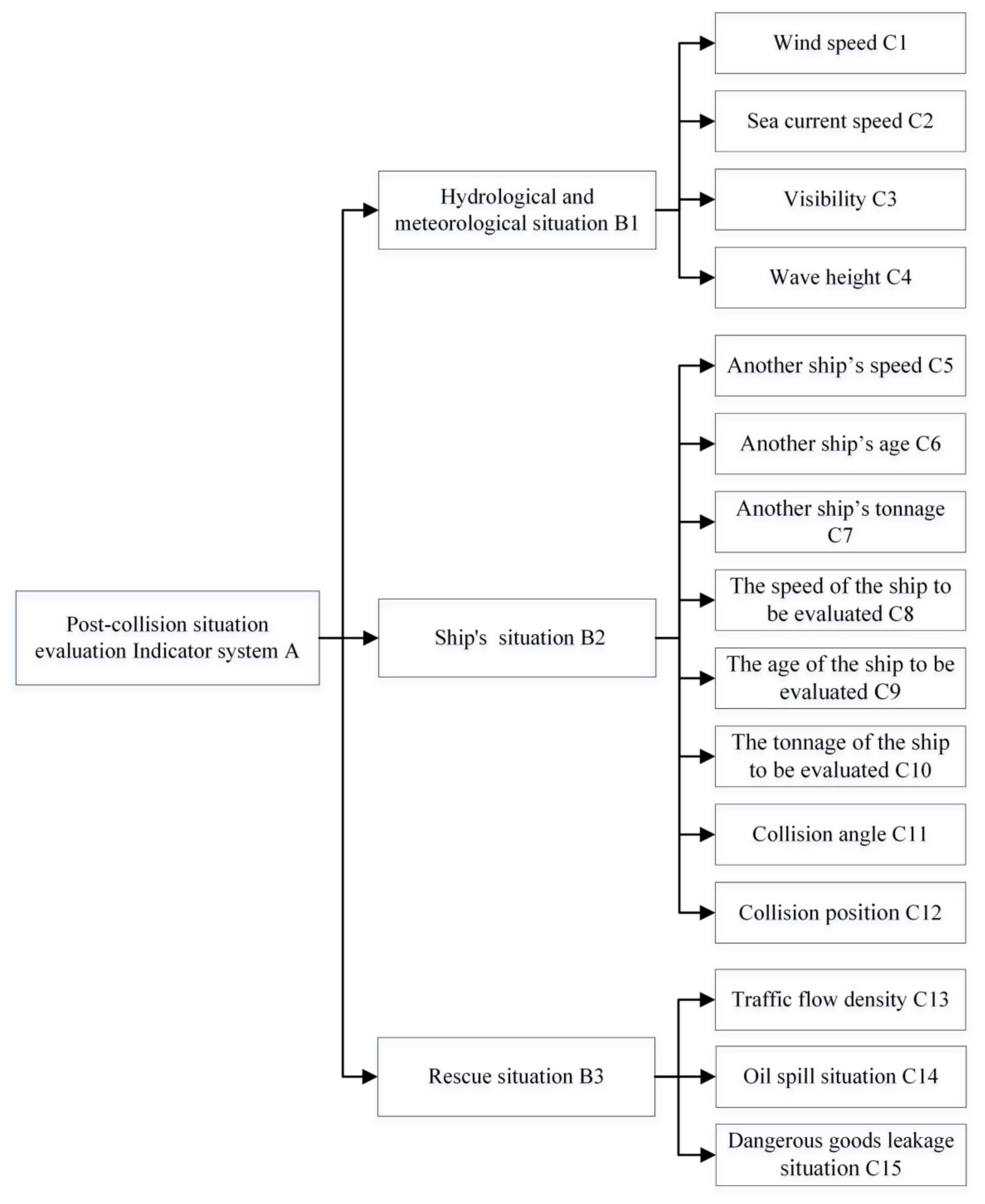
The evaluation indicator system of the situation safety after collisions at sea established in this paper is shown in
Figure 3. This article uses the idea of stratification of indicators in the Analytic Hierarchy Process (AHP) and divides the indicators into three levels [
28]. The top level is the evaluation indicator describing the post-collision situation safety of the ship, which is an abstract evaluation objective. The second level includes the ships situation, rescue situations, and emergency site hydrometeorological conditions. The third level provides 15 evaluation indicators, including wind speed, sea current speed, visibility, wave height, another ship’s speed, another ship’s tonnage, another ship’s age, the speed of the ship to be evaluated, the tonnage of the ship to be evaluated, the age of the ship to be evaluated, collision angle, collision position, traffic flow density, oil spill situation, and dangerous goods leakage situation.
The selection basis of each indicator in the third level is as follows:
Wind speed and sea current speed. Wind and sea current have a significant impact on the safety of ships at sea. If the wind and sea current are too strong, the ship’s maneuverability will deteriorate, and it is more likely to lose stability and capsize in complex seas [
29]. In this regard, the Maritime Safety Administration of China stipulates that ro-ro passenger ships with winds above force 8 Beauforts must not be allowed to sail. The high wind speed and sea current speed not only threaten the safety of the crew of the colliding ship, but also affect the arrival of emergency rescue forces. For example, the wind force for rescue helicopters to take off is limited to 8 Beauforts;
Visibility. Low visibility will make it difficult for the ship to approach and identify the rescue target. Thus, low visibility affects the arrival time of rescue assistance and hinders the development of on-site rescue work;
Wave height. The hull may be severely deformed by the impact of sea waves, and the rescue ship will experience fierce turbulence and sway under the action of strong waves. The deck is prone to waves, and if the seawater cannot be discharged in time, water will accumulate on the deck, causing slippery decks, complex operations, and even casualties and equipment damage [
29];
Ship’s speed. Under certain mass conditions, the higher the ship’s speed during the collision, the more serious the loss of both ships after the collision;
Ship’s age. As the age of the ship increases, the hull of the ship has a high degree of corrosion, and the structure of the ship is weaker than that of a newer ship. In addition, the age of the ship’s equipment is also relevant. After an accident, the ship’s self-rescue ability is poor. Therefore, the older the ship, the greater the possibility of loss after a collision [
30];
Tonnage. The inertia of ships of different tonnages is different, and the tonnage ratio of collided ships significantly impacts the loss after the collision [
30]. There is no indicator of ship mass in the accident report data that we have collected. No ship mass data were found in the ship accident database we collected. In actual collision accidents, mass information about the accident ships cannot be obtained in time, however, gross tonnage can be obtained immediately, therefore this article uses gross tonnage as an approximate substitute for mass;
Collision position. Generally, collision in the middle of the collision ship is more severe than head and stern collision of the collision ship [
14];
Impact angle. The impact angle refers to the acute angle of 0–90° between the bow and stern lines of the impacted ship. Generally, the impact angle is large, and the ship is seriously damaged [
31];
Traffic flow density. If the traffic flow is high, the maneuvering room is small and the traffic situation is complicated, which is not conducive to the development of rescue work;
Oil spill and dangerous goods leakage. If oil spills or dangerous goods leakage occur at the emergency site, this will increase the difficulty of emergency response and may endanger the lives of rescuers.
In addition, many vital indicators have a significant impact on the emergency situation after a ship collision. According to research [
32,
33,
34], the local restrictions (narrow channel structure, sharp turn, etc.) are an important factor that needs to be considered when formulating a rescue plan. Through the analysis of foretime accident cases, it is difficult to obtain the above indicators, such as narrow channel structure, sharp turn, and distance to coastal structures, in time when the accident occurs. Thus, the above indicators are not considered in the research of this article. This article uses the concept of traffic flow density to describe the traffic environment around the accident ship uniformly. Therefore, factors such as population density and whether it is an anchorage area are not considered in selecting indicators.
Based on the relevant research achievements regarding ship collision accidents at sea, we divide the safety risks into 5 levels. According to the literature [
35,
36], we determine the evaluation standards corresponding to each level for the indicator system above. The evaluation standards are given in
Table 1.
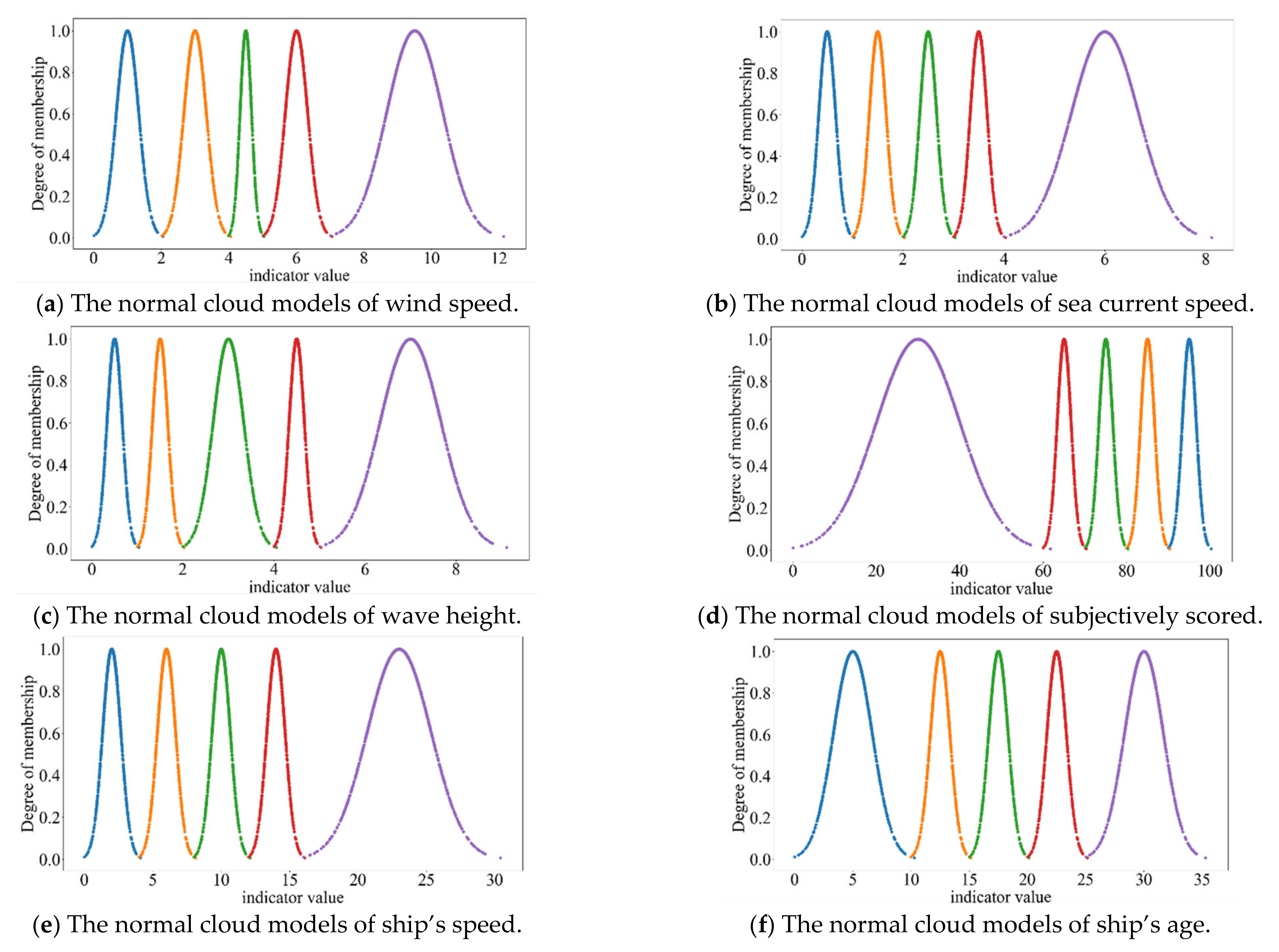
The unit of indicators C1 and C4 is level. The level of the C1 indicator uses the Beaufort scale [
37]. The level of the C4 indicator uses the Douglas scale [
38]. The following will convert the obtained wind speed and wave height data into the corresponding level.
The indicator values of C3, C12, C13, C14, and C15 are subjectively scored. For example, when the collision position is the bow, the ship’s condition is better than if the collision position were on other positions of the ship; therefore, if the collision position is the bow, the score is higher than the collision position of other parts.
The indicator value of C2, C5, C6, C7, C8, C9, C10, and C11 set an upper limit. This article considers the maximum possible value of the indicator under the current conditions when setting the upper limit. When these indicator values exceed the upper limit, they will be processed according to the highest upper limit. Among them, C7 is the indicator of another ship’s gross tonnage. C10 is the gross tonnage of our ship. C7 and C10 are inversely proportional. This is because, in the actual collision process, the larger the gross tonnage of one ship compared to a second ship, the higher the risk of the second ship and the lower the risk of the first ship.
We treat the interval boundary of each level of the emergency situation as a double constraint space
[
23],
and
are the maximum and minimum limit values of a certain level of a specific indicator. By the Equations (4)–(6), the expected values
, entropy
, and hyper-entropy
of the normal cloud model can be calculated, and we can then construct the extension cloud matter-element model of each evaluation level. The extension cloud models at all levels are shown in
Table 2. The cloud maps of the evaluation level of the emergency situation are shown in
Figure 4.
In Equation (6),
s is a constant that can be determined based on experience.
is the entropy of entropy, which indicates the degree of dispersion of entropy [
20,
39,
40]. In this paper, considering the degree of dispersion of the entropy of the obtained data, the
s value is set to 0.001.
2.5. Assign the Weights
2.5.1. Assign the Subjective Weights by AHP
The AHP is a multi-standard evaluation method which can objectively quantify the subjective judgments of qualitative problems. By analysing the factors that affect the safety level of accidents and their interrelationships, each indicator can be decomposed into different levels to form a multi-level structural analysis model that is objectively guided by the AHP [
41]. The subjective weight of the evaluation index can be obtained through the analytic hierarchy process.
The steps of using AHP to calculate subjective weights are as follows:
(1) Construct the judgment matrix
We compare the indicators of each level, then obtain a judgment matrix according to the comparison results. The judgment matrix is shown in Equation (7).
In Equation (7), we suppose that there are n indicators in this level,
and
represent the
i-th and
j-th indicator (
i,
j = 1, 2,…,
n).
represents the importance of indicator
relative to indicator
. In order to quantify the contrast judgment conveniently, a scale method of 1–9 is introduced. We use 1, 3, 5, 7, and 9 to show how important the indicator
is to indicator
; 1 means equally important, 3 means slightly important, 5 means strongly important, 7 means more strongly important, and 9 means extremely important, and 2, 4, 6, and 8 are used to represent compromise between numbers on the above scale. The meaning of
is shown in
Table 3.
There are three indicators (hydrometeorological situation, ship’s situation, and rescue situation) in the second level. The judgment matrix based on expert scoring is shown in Equation (8)
(2) Calculate the maximum eigenvalue and the maximum eigenvector of the matrix P; we can obtain the maximum eigenvalue as and the maximum eigenvector as . Normalizing the , we can obtain the weight vector of the judgment matrix P. The is [0.1, 0.64, 0.26].
(3) Consistency test
After calculating the weight of the indicator, we also need to calculate whether it has satisfactory consistency. The consistency test is shown in Equations (9) and (10) [
42,
43,
44].
In Equation (10),
is the consistency index used to determine whether the judgment matrix
is reasonable. When
< 0.1, this means that the judgment matrix
has consistency. The smaller the
CR value is, the better the consistency of the judgment matrix
is.
RI is a random consistency index, and the value of
RI is shown in
Table 4.
The weights of all indicators of the emergency situation after collisions at sea can be obtained after analysing a pairwise comparison of all levels of indicators. The subjective weights of all indicators are shown in
Table 5.
2.5.2. Assign Dynamic Weight by the Extension Correlation Function
The idea of the method to assign the dynamic weight is according to the position of indicator data falling into the classification interval. Indicator data falling into the centre of the interval should be given a greater weight value than indicator data falling on the edge of the interval. This is because the closer the indicator data fall into the centre of the classification interval, the clearer the grade that the indicator represents. At the same time, the larger the grade category that the indicator data fall into, the more dangerous the grade represented by the indicator is and the more attention should be paid to it, therefore a more excellent weight value should be given.
According to the literature [
45], the correlation function is used to determine the weight, and the steps of extension dynamic weight are as follows:
The value range of characteristic
in the classical domain of grade
is
.
The larger the grade category that the data fall into, the higher the weight value which should be given to the indicator.
From the above, we can calculate the weight by Equation (14).
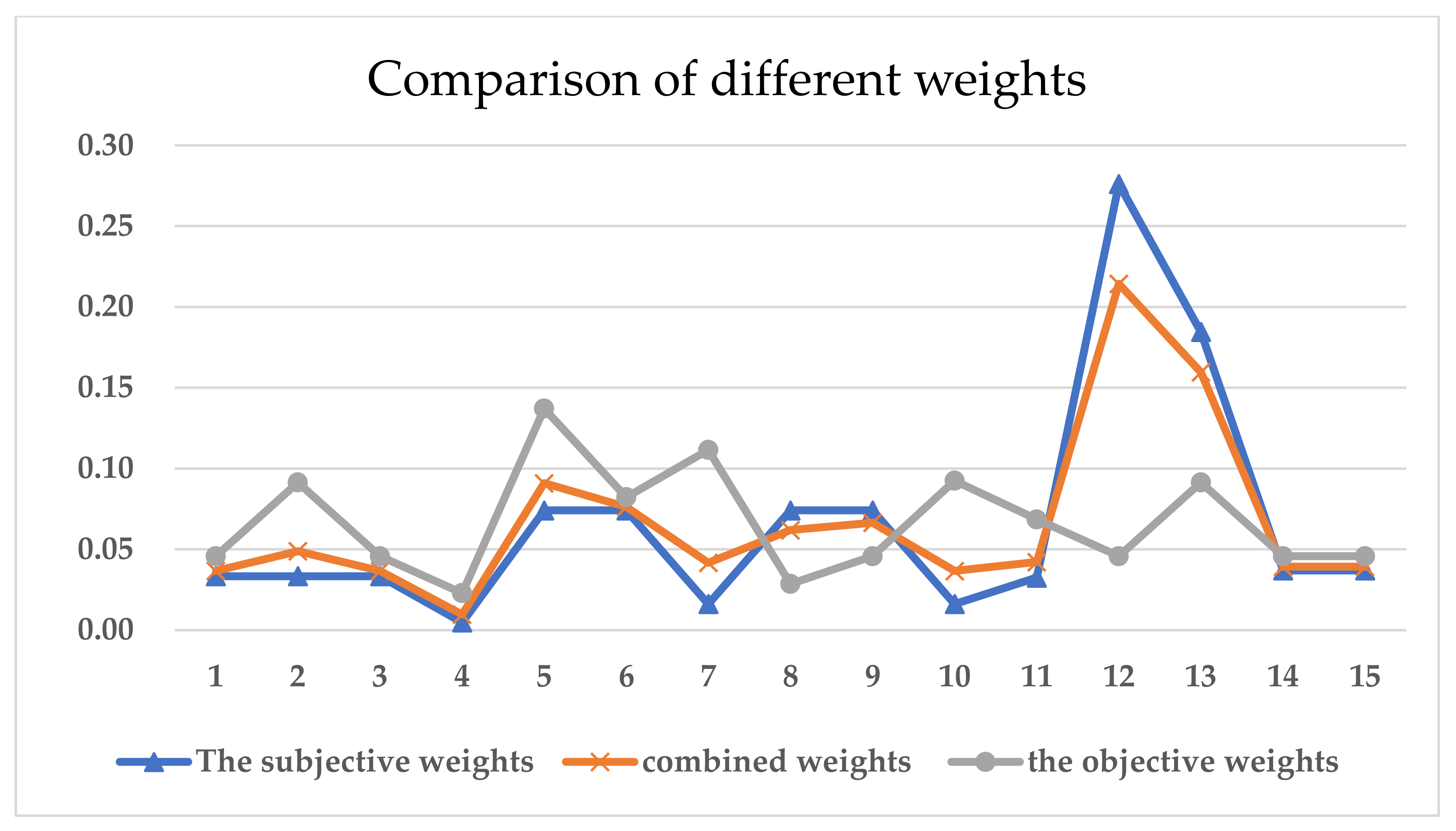
2.5.3. Assign the Combination Weight Based on the Idea of Game Theory
We determine the combination weight based on the idea of game theory, which comprehensively considers the subjective and objective weight of indicators and seeks compromise or consistency between different weights. It can achieve Nash equilibrium while reducing the deviation between subjective and objective weights, and optimize the combination of subjective and objective weights scientifically and reasonably, to obtain the optimal combination weight [
46,
47]. The calculation steps of combination weight are as follows.
(1) Let the basic weight vector set be
;
n is the number of indicators and
L is the number of methods to determine the weight, which is 2 in this paper. Let the linear combination weight coefficient be
. Any linear combination of these vectors is shown as Equation (15):
(2) The consensus and compromise between different weights were sought. With the minimization of deviation between
and
as the goal,
L linear weight combination coefficients
in Equation (15) were optimized to obtain the most satisfactory weight in
w, and the objective function was shown as Equation (16):
According to matrix differential properties, the linear equations of the first derivative condition of Equation (16) for optimization are shown as Equation (17):
(3) The optimized combination coefficient
obtained by calculation is normalized.
(4) Finally, the combination weight
based on game theory is obtained by the Equation (19).
2.6. Calculation of Correlation Degree
We consider each evaluation metric as a cloud droplet, the correlation of the value
of the metric to be evaluated about each level of the cloud model is shown as Equation (20)
In Equation (20),
is the quantitative value of the situation safety evaluation indicator;
,
, and
are the mathematical characteristics of the extension cloud corresponding to the level of situation safety of the indicator;
is a normal random coefficient with the expected value of
and standard deviation of
.
2.7. Calculate Safety Level
The evaluation vector is
. Finally, the weighted average method is used to obtain the comprehensive evaluation score
, and the formula is shown as Equation (22)
In Equation (22), is the score value, and the scores are 1, 2, 3, 4, and 5, corresponding to the evaluation level of 1 to 5, respectively; is the corresponding component of vector B.
In order to reflect the general trend of random factors that cannot be avoided in the evaluation process, the expected value
and entropy
can be obtained after m times cyclic operation.
In Equation (23), m is 100, and is the comprehensive evaluation score calculated for the i-th time.
Since the entropy
can reflect the dispersion of the situation security evaluation results, and the expected value
can represent the evaluation score of the situation security evaluation level, the ratio of expected value
and entropy
is defined as the credibility factor
.
The larger the value is, the greater the evaluation result’s dispersion, and the smaller the credibility is.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}