
Joint Tracking of Source and Environment Using Improved Particle Filtering in Shallow Water


Abstract
:1. Introduction
2. Particle Filter for Joint Tracking
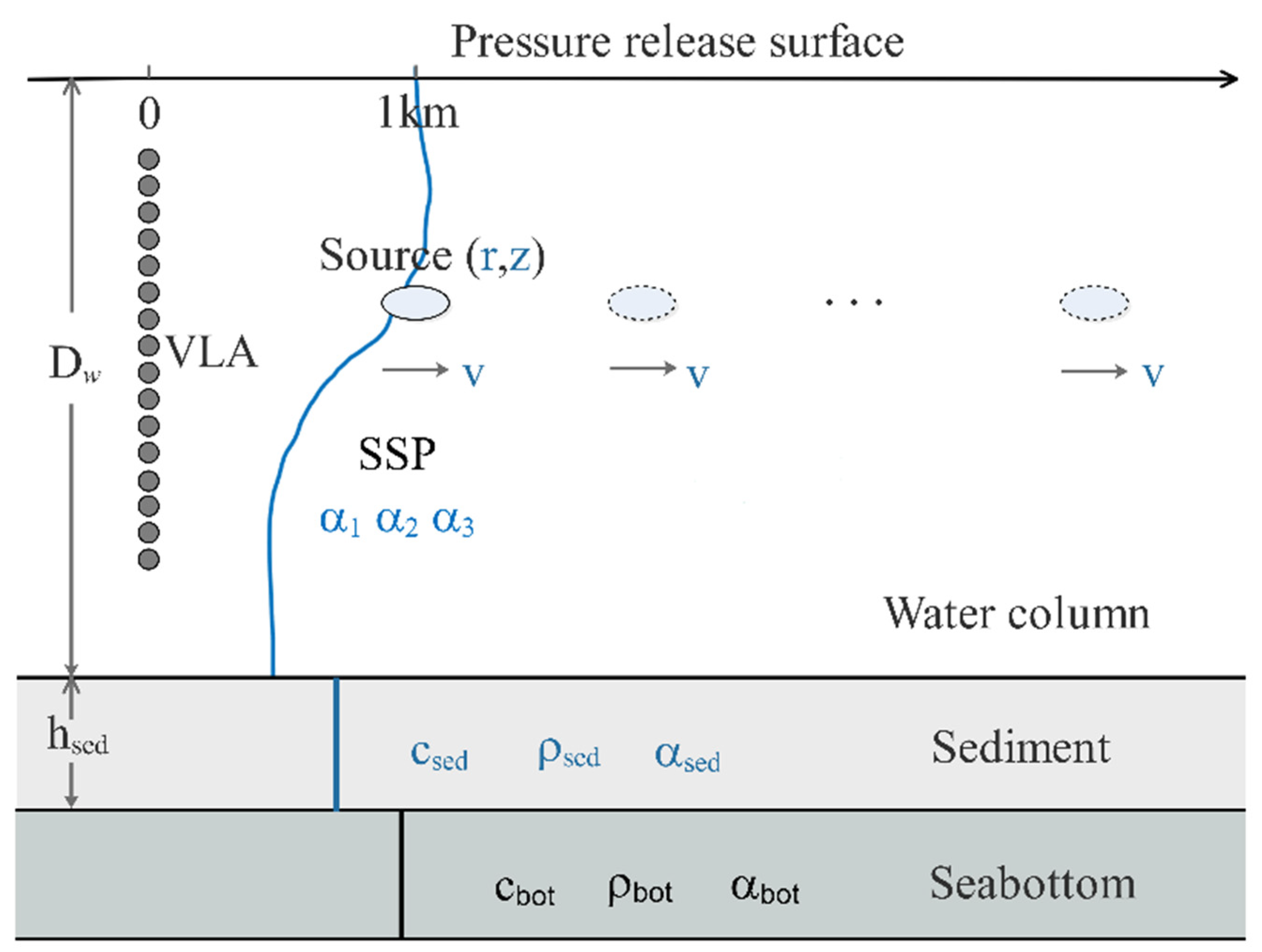
2.1. State-Space Modeling
2.2. The State Equation: Moving Source and Environment Parameter Modeling
2.3. The Measurement Equation: Normal Mode Propagation Model
2.4. Steps of the Improved Particle Filter Algorithm
3. Examples and Discussion
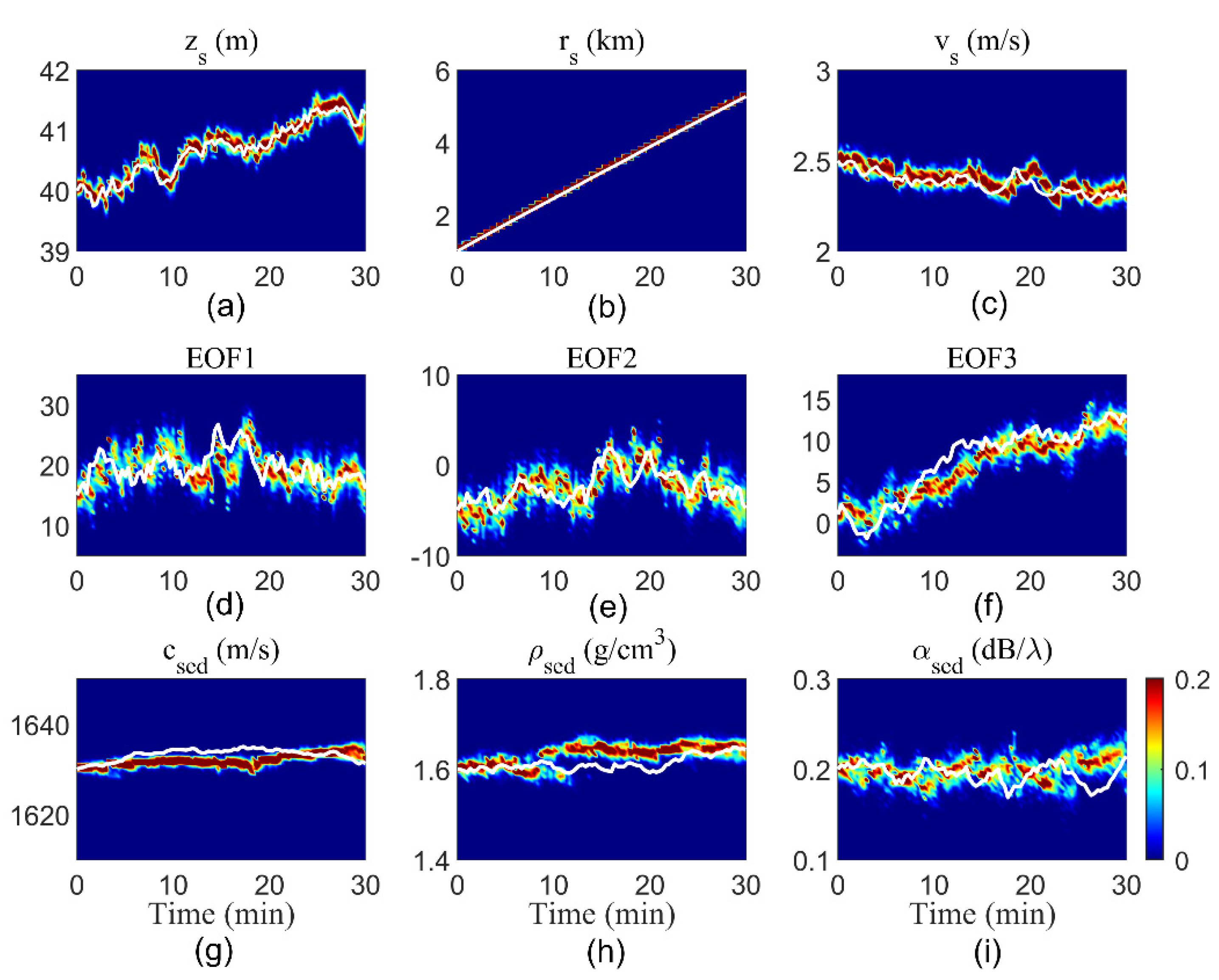
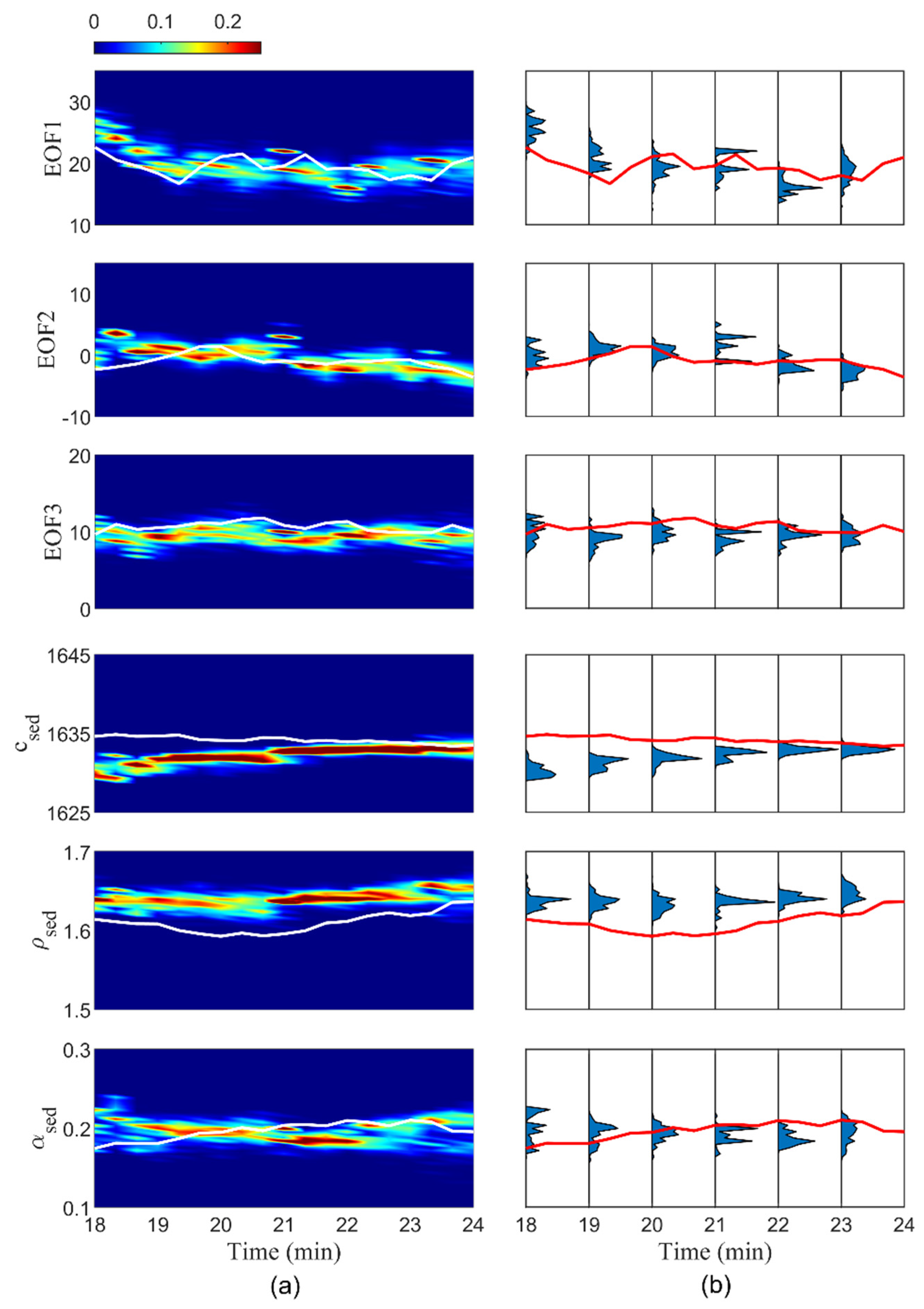
3.1. Simulated Data in a Slowly Changing Environment
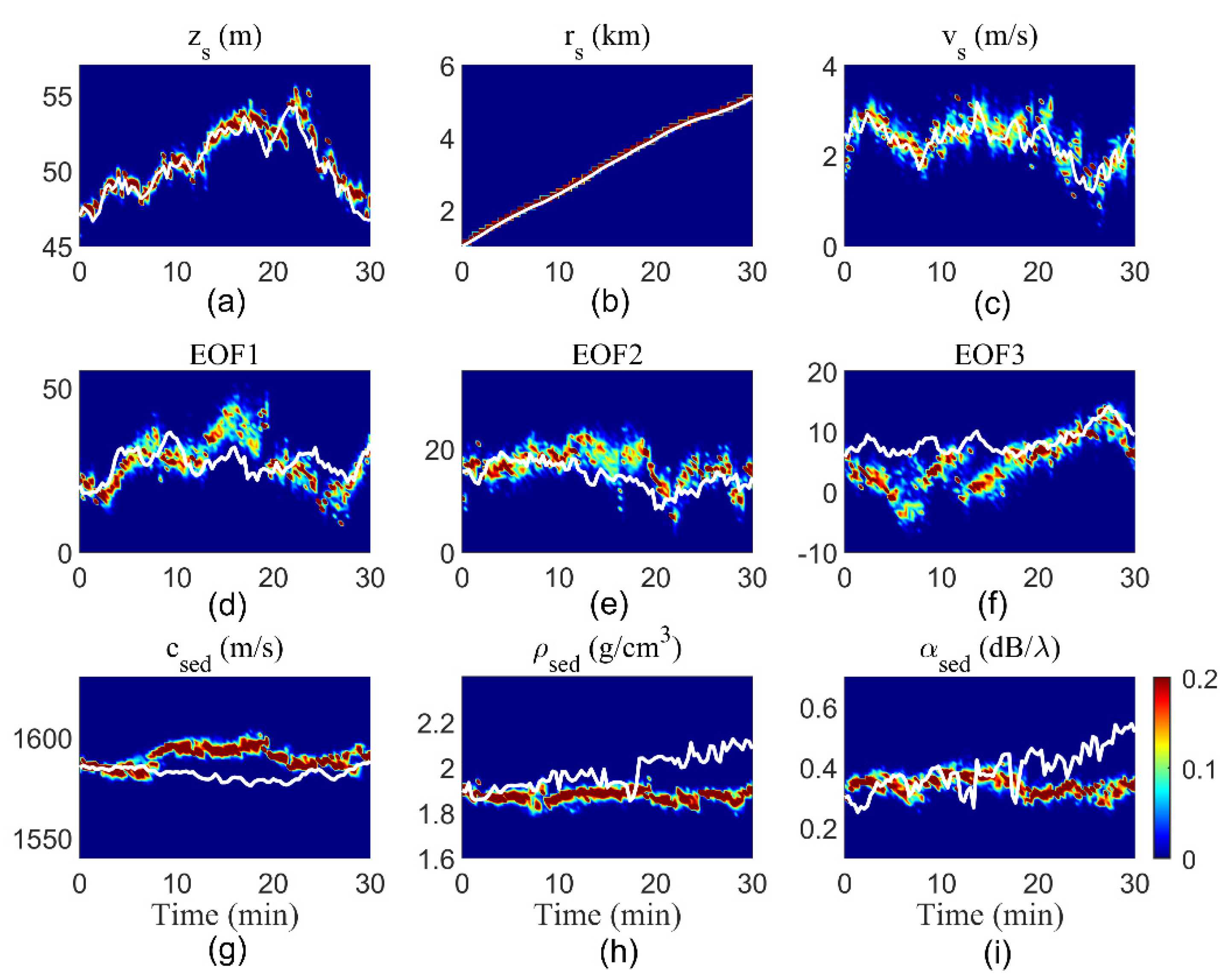
3.2. ASIAEX Experiment Data in the Fast-Changing Environment
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Collins, M.D.; Kuperman, W.A. Focalization: Environmental focusing and source localization. J. Acoust. Soc. Am. 1991, 90, 1410–1422. [Google Scholar] [CrossRef]
- Yang, T.C. Source localization in range-dependent and time-varying shallow water: The shallow water 2006 experimental results. J. Acoust. Soc. Am. 2019, 146, 4740–4753. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, K.D.; Xiao, P.; Duan, R.; Ma, Y.L. Bayesian inversion for geoacoustic parameters from ocean bottom reflection loss. J. Comput. Acoust. 2017, 25, 1750019. [Google Scholar] [CrossRef]
- Michalopoulou, Z.H.; Aunsri, N. Environmental inversion using dispersion tracking in a shallow water environment. J. Acoust. Soc. Am. 2018, 143, EL188–EL193. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baggeroer, A.B.; Kuperman, W.A.; Mikhalevsky, P.N. An overview of matched-field methods in ocean acoustics. IEEE J. Ocean. Eng. 1993, 18, 401–424. [Google Scholar] [CrossRef]
- Huang, C.F.; Hodgkiss, W.S. Matched-field geoacoustic inversion of low-frequency source tow data from the asiaex east china sea experiment. IEEE J. Ocean. Eng. 2004, 29, 952–963. [Google Scholar] [CrossRef]
- Michalopoulou, Z.-H.; Gerstoft, P.; Caviedes-Nozal, D. Matched field source localization with gaussian processes. JASA Express Lett. 2021, 1, 064801. [Google Scholar] [CrossRef]
- Niu, H.Q.; Reeves, E.; Gerstoft, P. Source localization in an ocean waveguide using supervised machine learning. J. Acoust. Soc. Am. 2017, 142, 1176–1188. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Schmidt, H. System-orthogonal functions for sound speed profile perturbation. IEEE J. Ocean. Eng. 2006, 31, 156–169. [Google Scholar] [CrossRef]
- Stoll, R.D. Measuring parameters that control acoustic propagation in granular sediments near the seafloor. J. Acoust. Soc. Am. 1998, 103, 2932–2933. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, R. Hybrid geoacoustic inversion method and its application to different sediments. J. Acoust. Soc. Am. 2017, 142, 2558. [Google Scholar] [CrossRef]
- Constable, A.J.; Nicol, S.; Strutton, P.G. Southern ocean productivity in relation to spatial and temporal variation in the physical environment. J. Geophys. Res. -Ocean. 2003, 108. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.; Michalopoulou, Z.H. Sound speed estimation and source localization with linearization and particle filtering. J. Acoust. Soc. Am. 2014, 135, 1115–1126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yardim, C.; Gerstoft, P.; Hodgkiss, W.S. Geoacoustic and source tracking using particle filtering: Experimental results. J. Acoust. Soc. Am. 2010, 128, 75–87. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duan, R.; Yang, K.D.; Ma, Y.L.; Yang, Q.L.; Li, H. Moving source localization with a single hydrophone using multipath time delays in the deep ocean. J. Acoust. Soc. Am. 2014, 136, EL159–EL165. [Google Scholar] [CrossRef] [Green Version]
- Li, J.L.; Zhou, H. Tracking of time-evolving sound speed profiles in shallow water using an ensemble kalman-particle filter. J. Acoust. Soc. Am. 2013, 133, 1377–1386. [Google Scholar] [CrossRef]
- Michalopoulou, Z.H.; Gerstoft, P. Multipath broadband localization, bathymetry, and sediment inversion. IEEE J. Ocean. Eng. 2020, 45, 92–102. [Google Scholar] [CrossRef]
- Yardim, C.; Gerstoft, P.; Hodgkiss, W.S. Tracking of geoacoustic parameters using kalman and particle filters. J. Acoust. Soc. Am. 2009, 125, 746–760. [Google Scholar] [CrossRef] [Green Version]
- Yardim, C.; Gerstoft, P.; Hodgkiss, W.S. Particle smoothers in sequential geoacoustic inversion. J. Acoust. Soc. Am. 2013, 134, 971–981. [Google Scholar] [CrossRef]
- Bo, L.K.; Xiong, J.Y.; Ma, S.Q. Sequential inversion of self-noise using adaptive particle filter in shallow water. J. Acoust. Soc. Am. 2018, 143, 2487–2500. [Google Scholar] [CrossRef] [PubMed]
- Duan, R.; Yang, K.D.; Wu, F.Y.; Ma, Y.L. Particle filter for multipath time delay tracking from correlation functions in deep water. J. Acoust. Soc. Am. 2018, 144, 397–411. [Google Scholar] [CrossRef] [PubMed]
- Michalopoulou, Z.H.; Jain, R. Particle filtering for arrival time tracking in space and source localization. J. Acoust. Soc. Am. 2012, 132, 3041–3052. [Google Scholar] [CrossRef]
- Dai, M.; Li, Y.; Yang, K.D. Joint inversion for sound speed field and moving source localization in shallow water. J. Mar. Sci. Eng. 2019, 7, 295. [Google Scholar] [CrossRef] [Green Version]
- Yardim, C.; Michalopoulou, Z.H.; Gerstoft, P. An overview of sequential bayesian filtering in ocean acoustics. IEEE J. Ocean. Eng. 2011, 36, 71–89. [Google Scholar] [CrossRef]
- Porter, M.B. The Kraken Normal Mode Program; SACLANT Undersea Res. Centre: La Spezia, Italy, 1991. [Google Scholar]
- Dahl, P.H.; Zhang, R.H.; Miller, J.H.; Bartek, L.R.; Peng, Z.H.; Ramp, S.R.; Zhou, J.X.; Chiu, C.S.; Lynch, J.F.; Simmen, J.A.; et al. Overview of results from the asian seas international acoustics experiment in the east china sea. IEEE J. Ocean. Eng. 2004, 29, 920–928. [Google Scholar] [CrossRef] [Green Version]
- Dai, M.; Li, Y.A.; Ye, J.Y.; Yang, K.D. An improved particle filtering technique for source localization and sound speed field inversion in shallow water. IEEE Access 2020, 8, 177921–177931. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environmental Parameters | ||||||
|---|---|---|---|---|---|---|
| State Variables | ||||||
| Constants | ||||||
| 106 m | Source | (m) | 40 | 0.1 | 0.1 | |
| 3 m | (m) | 1000 | 2 | 0.0134 | ||
| 1887 m/s | (m/s) | 2.5 | 0.2 | 0.0024 | ||
| 2.17 g/cm3 | Water | EOF1 | 15 | 1.5 | 1.5 | |
| 0.05 dB/ | EOF2 | −5 | 0.9 | 0.9 | ||
| EOF3 | 1 | 0.6 | 0.6 | |||
| Sediment | (m/s) | 1630 | 0.2 | 0.2 | ||
| (g/cm3) | 1.6 | 0.005 | 0.005 | |||
| (dB/) | 0.2 | 0.005 | 0.005 | |||
| Simulation parameters | ||||||
| Source frequency | 400 Hz | SNR | 29 dB | |||
| Receiver type | 16-VLA | Tracking length | 30 min (k = 91) | |||
| First/last hydrophone depth | 15/75 m | Sampling interval | 20 s | |||
| Parameter | zs (m) | rs (m) | vs (m/s) | EOF1 | EOF2 | EOF3 | csed (m/s) | ρsed (g/cm3) | αsed (dB/λ) |
|---|---|---|---|---|---|---|---|---|---|
| TARMSEPF | 0.0091 | 0.1994 | 0.0029 | 0.244 | 0.1537 | 0.2123 | 0.3490 | 0.0035 | 0.0020 |
| TARMSEimpro.-PF | 0.0076 | 0.1378 | 0.0026 | 0.2076 | 0.116 | 0.1558 | 0.2042 | 0.0018 | 0.0012 |
| % Impro. | 16 | 31 | 10 | 15 | 25 | 27 | 42 | 49 | 40 |
| (min) | Method | |||
|---|---|---|---|---|
| 3.3 | True value | 40.03 | 1492.8 | 2.45 |
| PF | 40.19 | 1493.4 | 2.44 | |
| Improve-PF | 40 | 1492.2 | 2.46 | |
| 13.3 | True value | 40.79 | 2933.2 | 2.42 |
| PF | 40.55 | 2934.2 | 2.40 | |
| Improve-PF | 40.72 | 2933.4 | 2.41 | |
| 28 | True value | 41.35 | 4997.5 | 2.32 |
| PF | 41.37 | 5001.0 | 2.28 | |
| Improve-PF | 41.33 | 4999.2 | 2.31 |
| (m) | 2 | 0.5 |
| (m) | 50 | 2 |
| (m/s) | 0.8 | 0.2 |
| EOF1 | 4 | 2 |
| EOF2 | 2.4 | 1.2 |
| EOF3 | 1.6 | 0.8 |
| (m/s) | 2 | 1 |
| (g/cm3) | 0.02 | 0.02 |
| (dB/) | 0.02 | 0.02 |
| Filter | zs (m) | rs (m) | vs (m/s) | EOF1 | EOF2 | EOF3 | csed (m/s) | ρsed (g/cm3) | αsed (dB/λ) |
|---|---|---|---|---|---|---|---|---|---|
| PF-500 | 0.0534 | 0.5956 | 0.0204 | 0.589 | 0.2707 | 0.4218 | 0.8018 | 0.0082 | 0.0119 |
| PF-1000 | 0.0304 | 0.2608 | 0.0171 | 0.4217 | 0.1867 | 0.4027 | 0.2874 | 0.0055 | 0.0098 |
| PF-2000 | 0.0244 | 0.1838 | 0.0161 | 0.263 | 0.171 | 0.3374 | 0.2722 | 0.0045 | 0.0028 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, M.; Li, Y.; Ye, J.; Yang, K. Joint Tracking of Source and Environment Using Improved Particle Filtering in Shallow Water. J. Mar. Sci. Eng. 2021, 9, 1203. https://doi.org/10.3390/jmse9111203
Dai M, Li Y, Ye J, Yang K. Joint Tracking of Source and Environment Using Improved Particle Filtering in Shallow Water. Journal of Marine Science and Engineering. 2021; 9(11):1203. https://doi.org/10.3390/jmse9111203
Chicago/Turabian StyleDai, Miao, Yaan Li, Jinying Ye, and Kunde Yang. 2021. "Joint Tracking of Source and Environment Using Improved Particle Filtering in Shallow Water" Journal of Marine Science and Engineering 9, no. 11: 1203. https://doi.org/10.3390/jmse9111203
APA StyleDai, M., Li, Y., Ye, J., & Yang, K. (2021). Joint Tracking of Source and Environment Using Improved Particle Filtering in Shallow Water. Journal of Marine Science and Engineering, 9(11), 1203. https://doi.org/10.3390/jmse9111203