1. Introduction
Over the years, there has been considerable progress in the development of various design techniques for the study of floating structures for various purposes in different water depths, such as floating platforms, wave energy devices, and breakwaters. Due to the world’s ever-increasing energy requirement, continuous depletion of fossil fuels and increasing environmental awareness, the energy industry has shifted focus towards renewable energy sources. Apart from solar and wind resources, waves have attracted high interest lately because of the promising prospect of wave energy converters. In recent years, several research groups have taken a keen interest in the development of efficient wave energy converters. In most cases, wave load analysis on the floating structures is performed using various linearized analytical models. For a better understanding the behavior of the wave energy devices under the action of waves, for the assessment of their motions, loads, and for power production, the wave energy industry puts trust in the utilization of these models. However, many physical problems associated with wave–structure interactions are essentially non-linear in nature and require non-linear models to properly realize the impact of wave load on structures.
The generic wave energy converter (WEC) concepts include point absorbers, attenuators, oscillating wave surge converters, oscillating water columns, overtopping devices and submerged pressure differentials. When it comes to the study of WECs, a large part of the topic consists of modeling the wave-structure interaction. Over recent decades, along with experimental studies, several linear, non-linear and analytical hydrodynamic models have been developed to investigate fluid–structure interactions for the assessment of motions, loads, and power production. However, considering the expenses associated with experimental studies, more and more researchers are leaning towards numerical studies for initial design studies and validations. Therefore, there is large interest regarding the development of simplified numerical models that can study wave structure interaction with high efficiency and acceptable reliability.
In order to design floating WECs, accurate prediction of the wave-induced loads on the floating structure is necessary. In particular, during the design, the consideration of the incoming wave amplitudes/wave heights is substantial and the non-linear wave effects cannot be ignored. As such, linear assumptions that are applied to potential theory lose applicability. Therefore, recently, some researchers have targeted the implementation of a Boussinesq-type model to study WECs associated with floating structures [
1,
2]. Boussinesq-type models allow the use of non-linear hydrodynamics and can also reproduce a large number of irregular sea states needed for validation, optimization and fatigue predictions. Hence, the study of wave–structure interaction and wave-induced forces associated with a non-linear effect on floating structures based on analytical models using Boussinesq equations (BEs) is of great interest due to the model’s wide applicability in the field of ocean and coastal engineering. This paper discusses computational fluid dynamics (CFD) simulations and the application of Boussinesq-type equations for the development of a non-linear analytical Boussinesq model (BM) to model a point absorber in the form of a floating vertical truncated cylinder.
There has been limited number of studies associated with non-linear wave diffraction by a floating vertical cylinder based on the BE in shallow water. Indicatively, the study of wave forces on multiple cylinders using cnoidal and solitary wave theory by employing Bessel coordinate transformation in shallow water was carried out [
3]. The analytical solutions of wave interaction with a rigid vertical circular cylinder was obtained [
4] based on higher-order BEs. Using a three-dimensional numerical model in deep water, the free surface elevations and wave forces around a floating truncated vertical cylinder were studied [
5] and the results were compared against analytical and experimental data. Using the eigenmode expansion method, the wave force analysis on a floating barge was studied [
6] based on Boussinesq type-equations. Under hydrostatic assumptions, the dynamics of floating structures was studied [
1] through an analytical solution based on non-linear BEs and shallow water equations. A comparison of wave forces and free surface elevations of a box-type floating structure between was performed between analytical Boussinesq solutions and CFD simulations [
7]. Furthermore, a general BM was developed [
8] associated with two-layer fluids with floating rigid plate based on BEs to investigate the effect of interfacial tension on internal waves. A new multi-layer Boussinesq-type model associated with highly non-linear and dispersive surface waves using a mild slope seabed was developed [
9]. On the other hand, the error estimation and stability analysis of the numerical solutions of the damped Boussinesq equation based on the Ciarlet–Raviart mixed finite element method was investigated [
10]. A meshless numerical procedure using the interpolating element-free Galerkin method was developed [
11] to check the unconditional stability and convergence of the numerical scheme. The numerical solution of transport equation in spherical coordinates based on generalized moving least squares and kriging least-squares approximations was studied in [
12].
Another interesting approach for non-linear modeling of wave–structure interaction is numerical simulation using CFD. However, limited studies are available that utilize CFD for diffraction and radiation analysis of floating bodies. CFD models are widely popular because of their level of accuracy and capability of handling complex problems arising in the ocean and marine engineering. Furthermore, due to their non-linear, sophisticated and more realistic modeling, with the help of recent advances in computational resources, CFD simulations can offer deeper insight into floating body hydrodynamics, which can facilitate better WEC design and operating setup. Therefore, CFD is undoubtedly a great tool for investigating the performance of WECs in realistic sea conditions. However, the cost and time required for CFD simulations make it impractical for a large number of design and setup studies. Thus, a mid-fidelity solver that can realize most of the non-linear phenomenon with high computational efficiency can contribute greatly to quicker and greater development of the wave energy sector.
Among recent works, a hierarchical investigation of hydrodynamic models for wave-induced motion of point absorbers was performed [
13] using linear and non-linear (depth-integrated Boussinesq type) models and compared with CFD results. They concluded that both linear and non-linear models over predict the heaving response of the point absorber comparing CFD results, however, the non-linear model does not perform better than the linear model. A high-order finite element model was formulated for mooring cables and coupled that with CFD for modeling floating WECs and validated against experimental measurements of a cylindrical buoy in regular waves [
14]. A similar problem was addressed by numerically studying the laminar flow around heaving axisymmetric three-dimensional cylinders with damping plates for various Keulegan–Carpenter numbers, based on the CFD model [
15]. The simulation of a horizontal cylinder in heave motion and the three degrees of freedom (3DoF) motion of a freely floating rectangular barge in waves using the CFD model REEF3D was undertaken and the results compared with experimental data [
16]. A vertical cylinder moving in waves using both experiments and CFD studies, with emphasis on analyzing the wave profile generated by the moving cylinder in the calm water [
17]. A point absorber WEC was investigated [
18] using Reynolds-averaged Navier–Stokes (RANS) simulation based on the CFD method. They also investigated a floating point absorber in extreme wave conditions [
19]. Using a fully non-linear numerical method and potential flow, the results of wave scattering by a vertical cylinder were compared with experiments and low-order perturbation results in [
20]. A small heaving point absorber for low-power ocean devices was developed [
21] based on the counter-rotating self-adaptive mechanism and numerical simulation to study the vertical force, heaving displacement and velocity, and width ratio of the multi-floating bodies. A numerical study of wave run-up on fixed cylinder using OpenFOAM was also performed [
22].
Following the analytic and comparative research on the working principle of current WECs, the floating point absorber is one of the best choices for the wave energy sector of ocean devices [
21]. Recently, several comparative studies based on various methodologies, such as analytical Boussinesq, numerical CFD models, other numerical data, and experimental studies associated with wave interaction with floating structures, have been performed [
2,
7,
8,
13,
23,
24] to analyze the fidelity level of accuracy among them for benchmarking.
While many numerical studies have been performed to analyze wave structure interaction, very few focus on higher-order diffraction and wave run-up. Furthermore, studies focusing on the measurement of the free surface elevation, compared to forces on the fixed structure, are also limited, more so in shallow water (especially for CFD). Therefore, in the present study, the paper [
2] is extended to full formulation and solutions of the BM and more wave period cases in CFD simulation to (i) compare results for the wave gauge behind the cylinder between Boussinesq and CFD simulations (by including turbulence model and better mesh resolution and distribution), (ii) compare the CFD results with the immersed boundary method and Navier–Stokes equation, (iii) study the wave forces, moment encountered by the cylinder while facing different waves of same steepness, (iv) observe the pressure distribution around the cylinder while encountering waves, (v) analyze the effect of second-order sub-harmonic waves on various parameters. Explicitly, efforts have been made to formulate the problem of wave diffraction by a floating fixed truncated vertical cylinder based on Boussinesq-type equations. The non-linear BEs with depth parameters, which indicate the specific elevations in the exterior region are obtained based on an expansion of velocity potentials as a power series in the dispersive effect. Using the perturbation technique, the velocity potentials and associated non-linear BEs by incorporating dispersive effects into solutions and Bessel function is presented. Further, the second-order coefficients associated with the velocity potentials and wave elevations are obtained by applying matching conditions at the fluid-structure interfaces.
On the other hand, the results of free surface elevations and wave heights from the CFD results are compared against experimental data, numerical data, and other numerical results available in the literature. Then, a comparison between super-harmonic second-order wave amplitudes in various locations is performed between BM and CFD simulation results to ascertain their accuracy and to analyze the fidelity level of the developed BM. In addition, the effects of the radius of the cylinder, wave number, water depth, and depth parameters on sub-harmonic second-order wave amplitude at a specific location around the cylinder is analyzed. Finally, significant conclusions are drawn from the comparative study and future scope of the present model.
2. Mathematical Model
The mathematical formulation of the problem is considered in three-dimensional Cartesian coordinate system (
x*,
y*,
z*),
x*–
y* being the horizontal plane and
z*-being pointing upward starting at the undisturbed free surface. The fluid occupies the region –
h* <
z* < 0, –
∞ <
x*<
∞ and a cylinder of radius
r =
a is floating at
z* = 0 with draft
d and water depth at
z = −
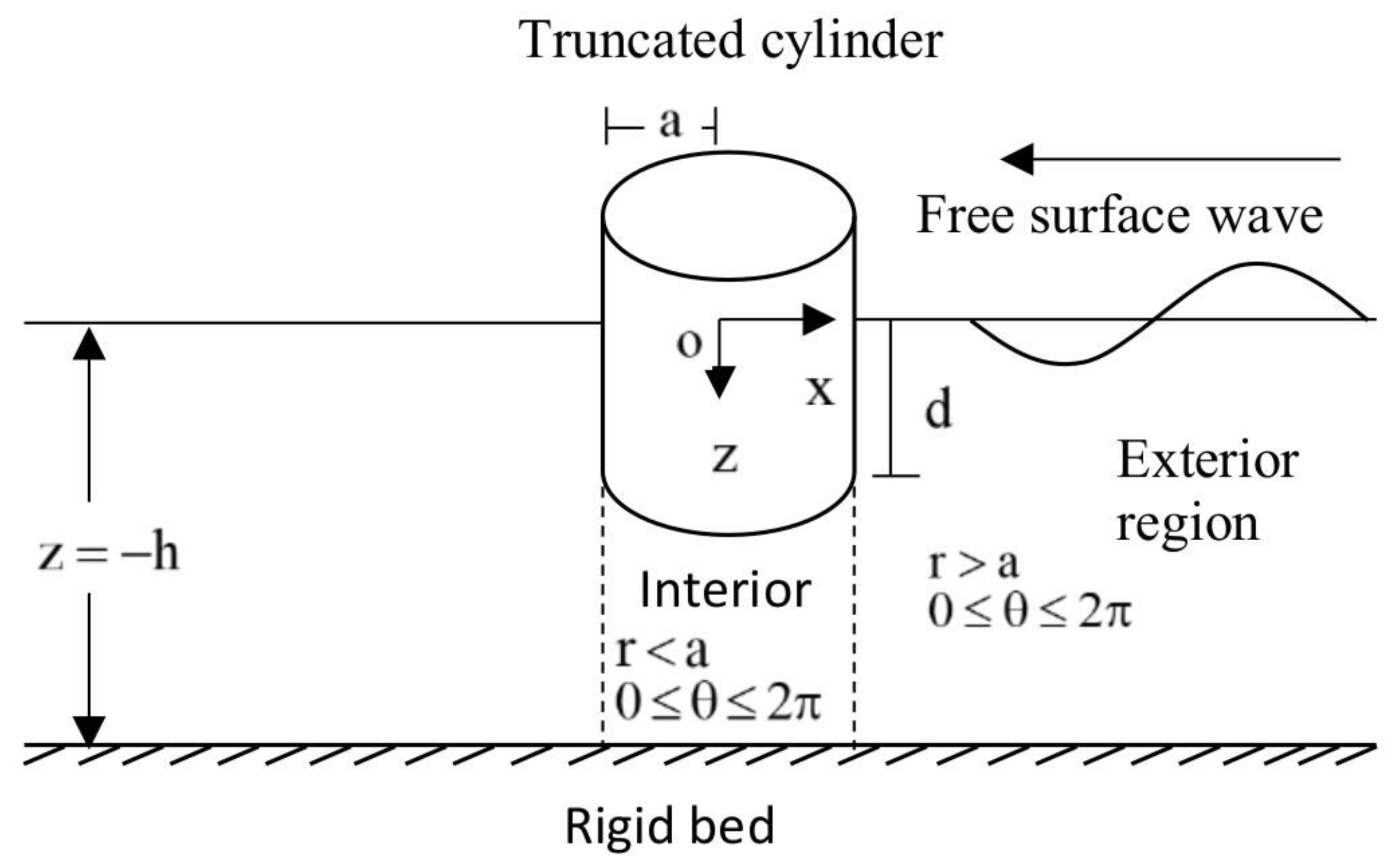
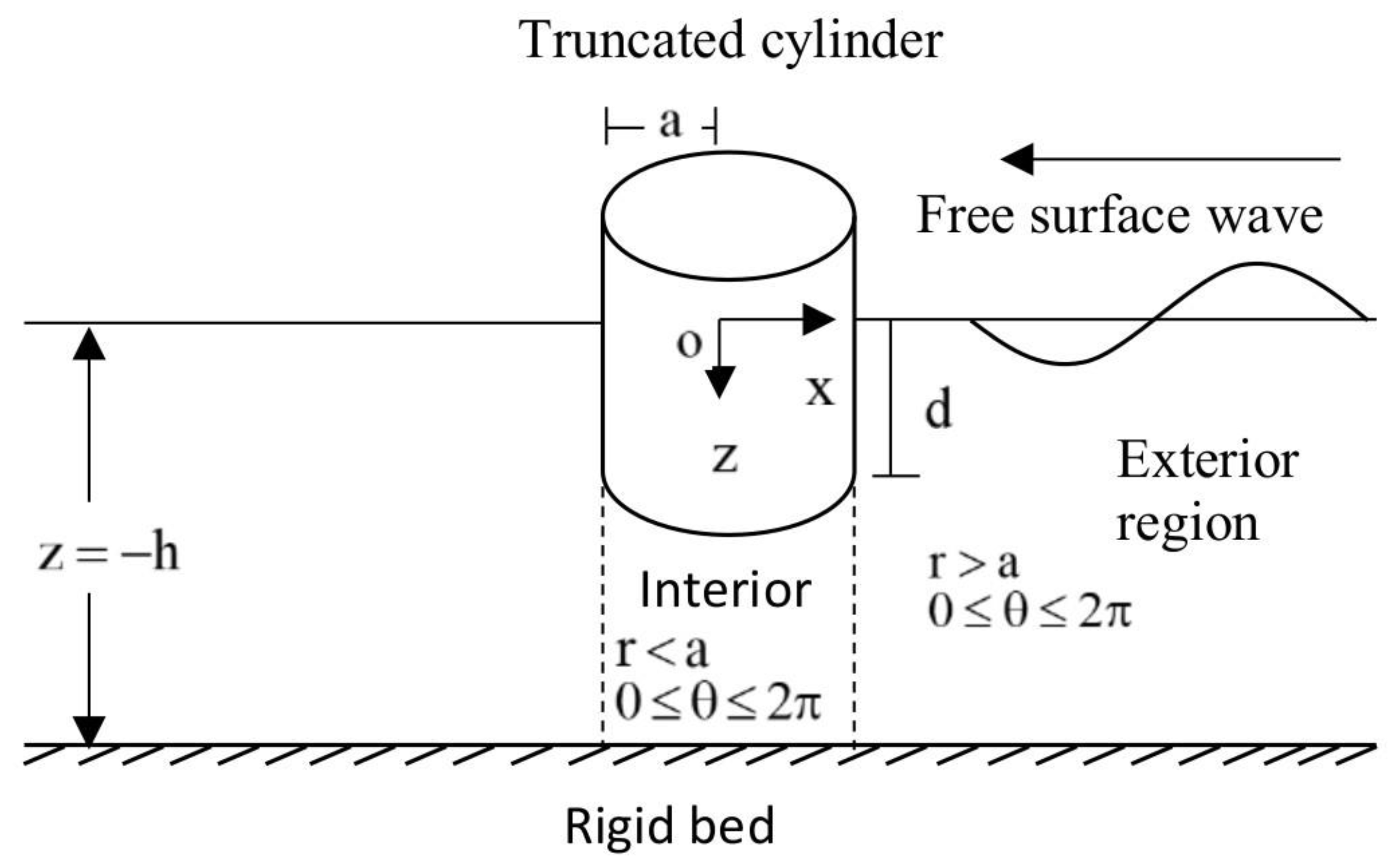
h*. * indicates a dimensional variable. Hence, the fluid region is divided into two regions: an interior which corresponds to the area below the cylinder and exterior region constitute the rest of the region (
Figure 1). Therefore, the velocity potential and the free surface displacement in the exterior region are denoted by Φ* and
η*, respectively. Furthermore, the fluid is assumed to be inviscid, incompressible, and the motion is irrotational, and simple harmonic in time with angular frequency ω.
The velocity potential Φ* satisfy the Laplace equation as:
where
in Cartesian co-ordinate system, the subscript ‘
’ denotes the double partial derivatives w.r.t to
.
As the bottom is considered as rigid, the bottom boundary condition yields.
The equations of motion for the exterior region can be expressed as:
where
is the pressure,
g = gravitational constant, and
ρ = fluid density. From Equation (3), the pressure continuity at the free surface
by considering atmospheric pressure zero leads to
Now, the problem is governed by one-linear equations and three boundary conditions which are non-linear in the potential variables and . Therefore, the problem itself is non-linear as is not known a priori.
The next subsection derives the nonlinear BEs for exterior region associated with free surface motions in the presence of floating fixed vertical cylinder.
2.1. Non-Linear Boussinesq Equations (BEs) in the Exterior Region
The following non-dimensional variables are used for the derivation of nonlinear BEs with a floating truncated vertical cylinder (as in [
25,
26]):
where
= length representative of the water depth scaled by
,
= time,
= water pressure,
is the wave length,
is the wave amplitude,
= free surface elevation, and
= radius of the cylinder.
In order to characterizing long waves, the following two non-dimensional parameters
and
are used as:
where
and
in Equation (6) are the nonlinearity and frequency dispersion and are assumed to be small.
The non-dimensional three-dimensional governing equation in terms of velocity potential
is expressed as (hereafter all the non-dimensional symbols are neglected):
where
, with
is the radial distance from the z-axis and
is the angle about the
x-axis.
The generalized Bernoulli equation read as dynamic boundary condition:
where the subscripts ‘
’ and
z denote the partial derivative w. r. t.
and
z, respectively.
is known as the Ursell number.
The kinematic condition at
in non-dimensional form is given by:
No flow condition at the bottom boundary yields:
Integrating Equation (7) w. r. t.
and using boundary conditions (9–10), results in:
The kinematic boundary condition on the cylinder is given by:
The velocity potential satisfies the far field radiation condition as
The next section presents the non-linear BEs in terms of velocity potential with depth parameters at specific elevations in the exterior region based on perturbation technique and second-order wave amplitudes around the floating fixed truncated vertical cylinder in the application range of weakly dispersive waves.
2.2. BEs for Exterior Region Based on Perturbation Technique
The velocity potential
in polynomial form can be expanded as:
where
. Substituting Equation (5) into Equations (7) and (10) equating the powers of
in terms of the specific elevation at
and related velocity potential
, one can obtain (as in [
8,
27]).
Again, substituting Equation (15) into Equation (11), and on simplification, the BE in terms of
and
in the exterior region is obtained as:
Substituting
from Equation (15) into Equation (8), the nonlinear free surface condition is derived as:
where the higher-order non-linear terms are neglected.
The next subsection presents the second-order free surface elevations and velocity potentials in the exterior and interior regions using suitable Bessel’s and Hankel’s functions associated with wave diffraction by a floating fixed truncated vertical cylinder.
2.3. Second-Order Free Surface Wave and Velocity Potentials for Exterior and Interior Region
The second-order free surface displacement in exterior region
can be expressed as:
where
are the unknown second-order wave amplitude to be determined. Further, the + sign and – sign denote the super- and sub-harmonic parts generated by the interactions of the linear waves (m-wave and n-wave), respectively,
is the Bessel function of first kind of order
l (as in [
3]),
,
, and
with
km and
kn are the wave numbers of the m and n-waves associated with the wave frequency
and
, respectively. Further,
and
are the phases of m- and n-wave, respectively.
The incident velocity potential
and the diffracted velocity potential
can be expanded as:
where
is the Hankel function of first kind of order
l.
and
are the unknown coefficients of super- and sub-harmonic waves.
Hence, using Equations (19) and (20), the total potential
can be expressed as:
The second-order velocity potential
in the interior region can be written as:
where
is the unknown coefficient and
are the modified Bessel functions of first kind of order
l.
The next subsection determines the unknown coefficients in terms of second-order super- and sub-harmonic amplitudes associated with free surface elevations and velocity potentials using matching conditions.
2.4. Determination of Second-Order Free Surface Amplitude and Unknown Coefficients
The unknowns
,
,
and
associated with Equations (18)–(20) and Equation (22) can be determined by applying the structural boundary conditions and matching the pressure and normal velocities across the boundary at
r =
a. The boundary conditions are given by:
The wave amplitudes defined in Equation (18) can be determined by applying the structural boundary condition (23) and using Equation (18) into Equation (15). However, hereafter the super-harmonic wave amplitude is considered for comparing with CFD model simulations and the effect of sub-harmonic second-order wave amplitudes on different parametric values in subsequent sections.
Applying the boundary condition (24) into Equation (21) and Equation (22), one can obtain
where:
Furthermore, using Equation (21) into the boundary condition (23), one can obtain
where
Furthermore, the velocity continuity condition (25) gives
Further, applying the structural boundary condition (23) and using Equation (18) into Equation (17), one can obtain the second-order wave amplitude
as
Now solving Equations (26)–(28), the second-order wave amplitude
is obtained as
where
with
where
,
and
denote to the 1st, 2nd, and 3rd derivatives of Hankel’s function, respectively, and the same as with Bessel’s function
.
The next section describes the numerical CFD model based on OpenFOAM solver in terms of CFD, mathematical model equations, computational mesh, the case set up, and computational resource associated with the aforementioned problem.
4. Numerical Results
In this section, several numerical results associated with the comparison among CFD, experimental, numerical data, and analytical BM results, wave forces, moment, pressure distribution around the cylinder, effects of radius, wave number, water depth, and depth parameters at specific elevations are analyzed. First, comparisons are made of normalized free surface elevations/wave heights among CFD, EFD, and numerical data available in the literature in the probe locations mentioned in the subsequent subsection. Then, the simulation results of wave forces and moments acting on the cylinder and pressure distribution around the vertical cylinder are presented. To check the accuracy of the second-order super-harmonic wave amplitude Boussinesq results, comparisons between the Boussinesq and CFD model simulations on the second-order super-harmonic wave amplitudes for the same probe locations are presented. Finally, to analyze the effects of radius, wave number, water depth, and depth parameters at specific elevations on the second-order sub-harmonic wave amplitudes have been studied.
4.1. Comparison and CFD Simulations
Validation studies for CFD simulation results were undertaken for cases performed in [
5,
29]. Nine cases were simulated, for different wave lengths and wave heights. The test cases are shown in
Table 2.
For validation, the simulation results were compared with EFD reported in [
28], IBM data reported [
5], and numerical wave tank (NWT) data generated using Navier–Stokes (NS) and marker and cell (MAC) methods reported in [
30]. For normalization of the free surface elevation data from CFD, the total free surface displacement was divided by the incoming wave height,
H/
H0. Calculations were also made based on amplitude since the analytical Boussinesq method calculated the free surface displacement based on amplitude,
A/
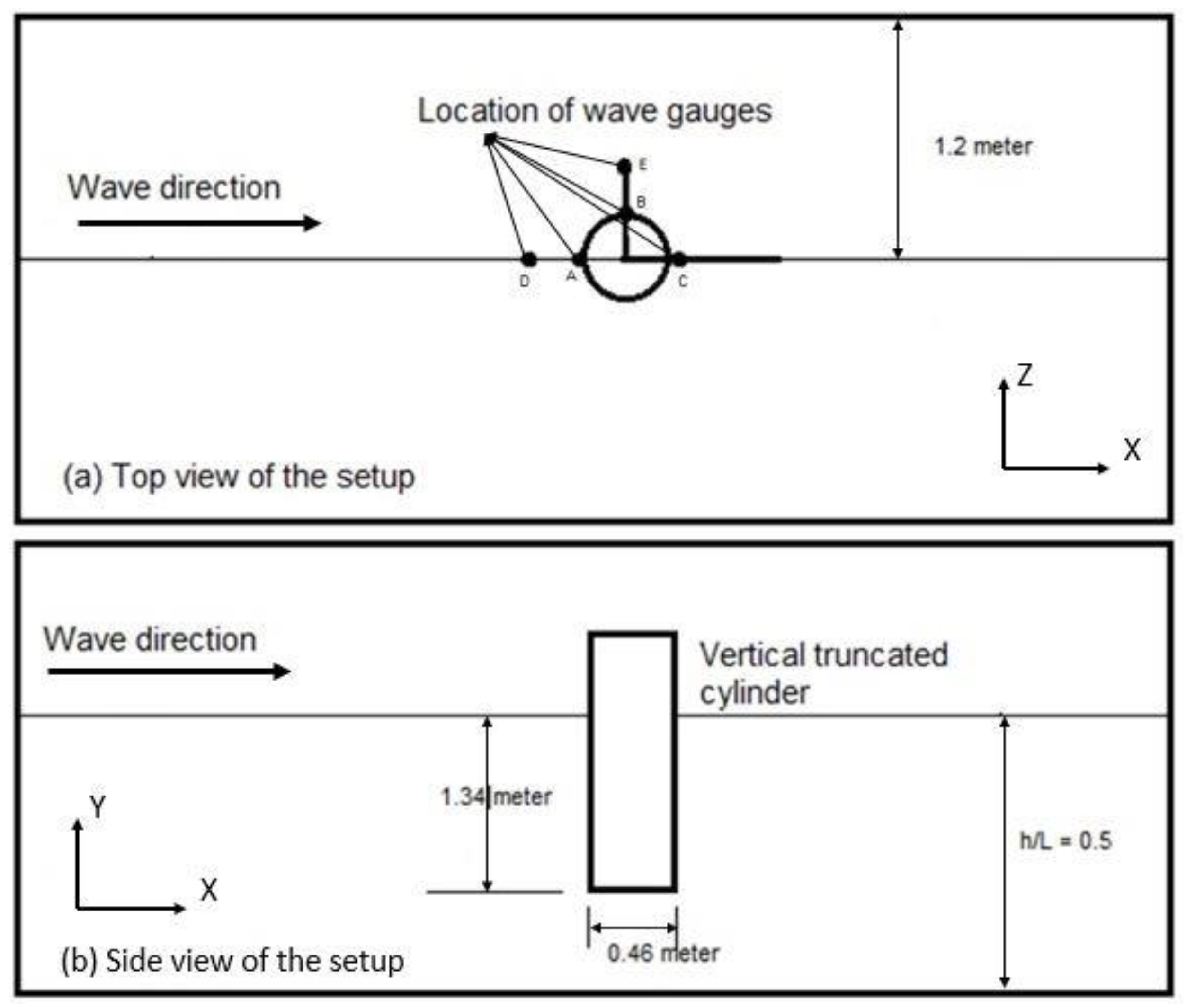
A0. The target of the simulations was to analyze the diffraction of the incoming waves due to interaction with a floating fixed vertical truncated cylinder. Thus, three wave probes were placed at locations close to the cylinder body, one at 0.48 m before the cylinder and one at 0.48 m at the side (
Figure 3).
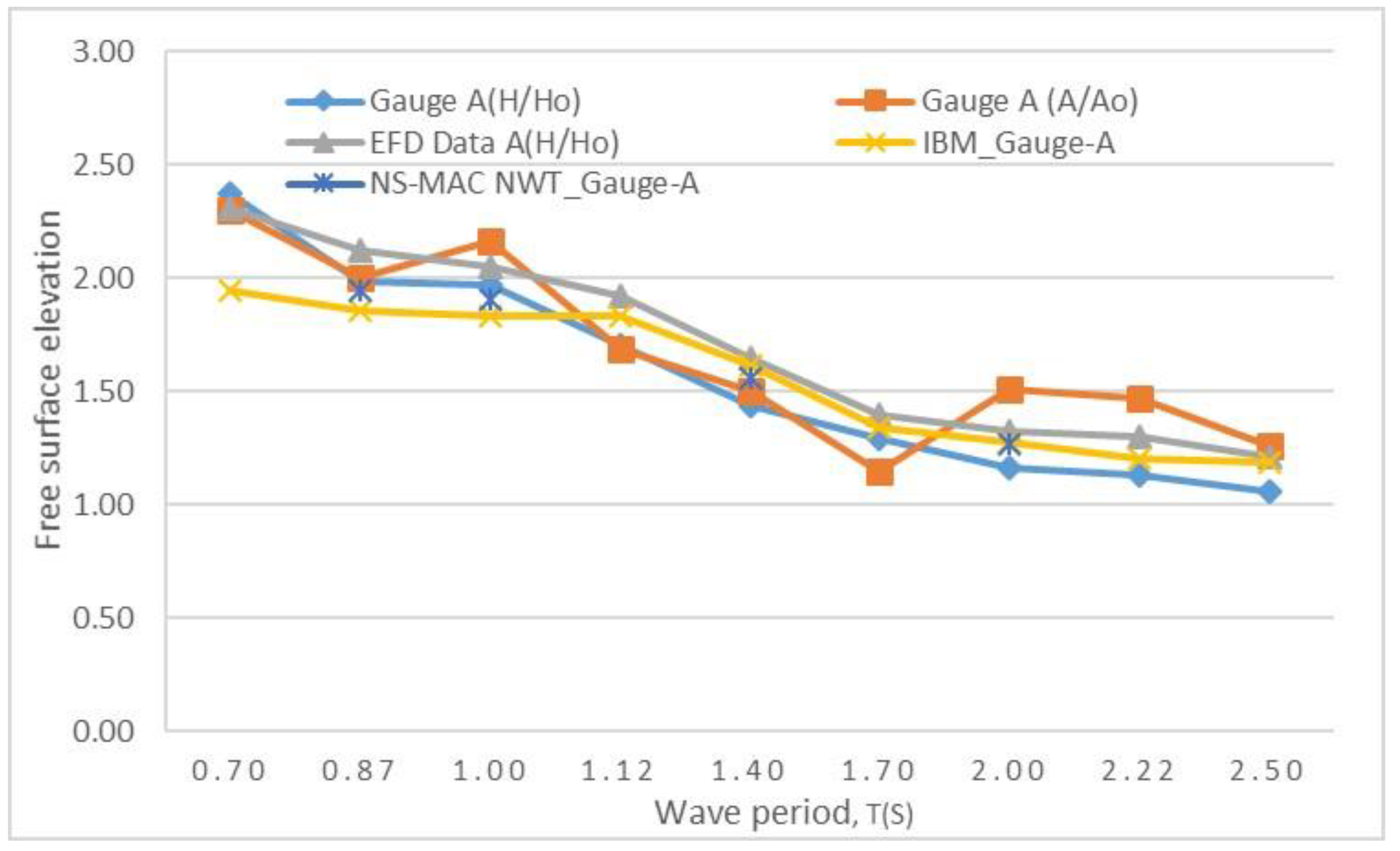
Figure 5 shows the normalized free surface elevation just before the cylinder at location A. The results show that almost for all cases, the free surface shows higher elevation than the incoming incident waves. Especially for the low wave period cases, the waves surge up to 2.4 times of initial wave height on the cylinder wall. The CFD results here show reasonable agreement with experimental data, although the values do not exactly agree, the trend is well captured. For almost all cases, CFD under predicts the results compared to EFD results. Slight deviation might be explained to some extent by the location of the probe in the CFD model. In CFD, the probe was set 5 mm away from the cylinder, whereas in experiments it was exactly on the cylinder. This could not be done in the CFD model since probes in simulation can only capture data from a cell, not at voids. Furthermore, the numerical dissipation also contributes to the under prediction. The presented CFD results also agree better with the NS model results, since both follow a similar mathematical model, compared to the immersed boundary method results.
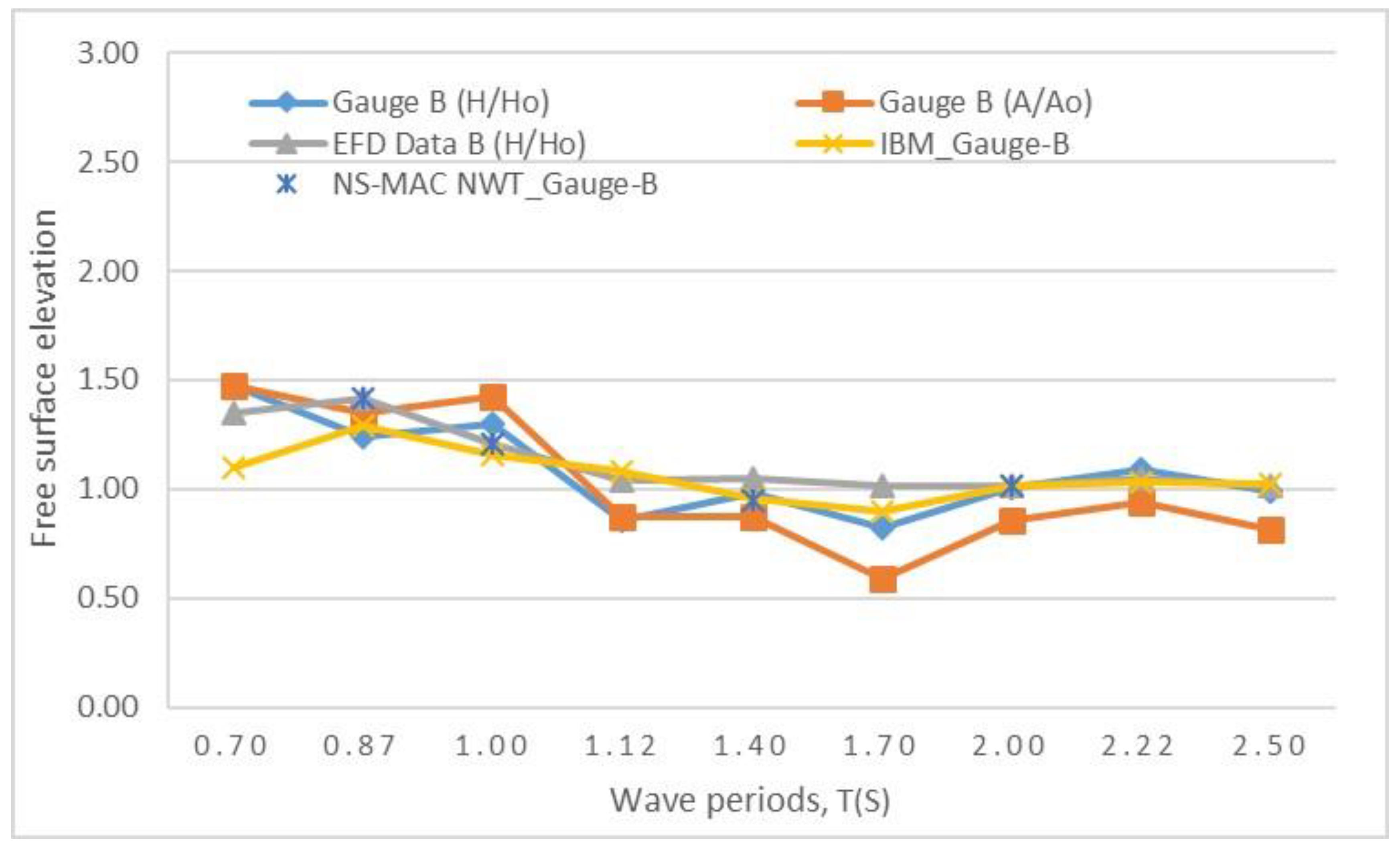
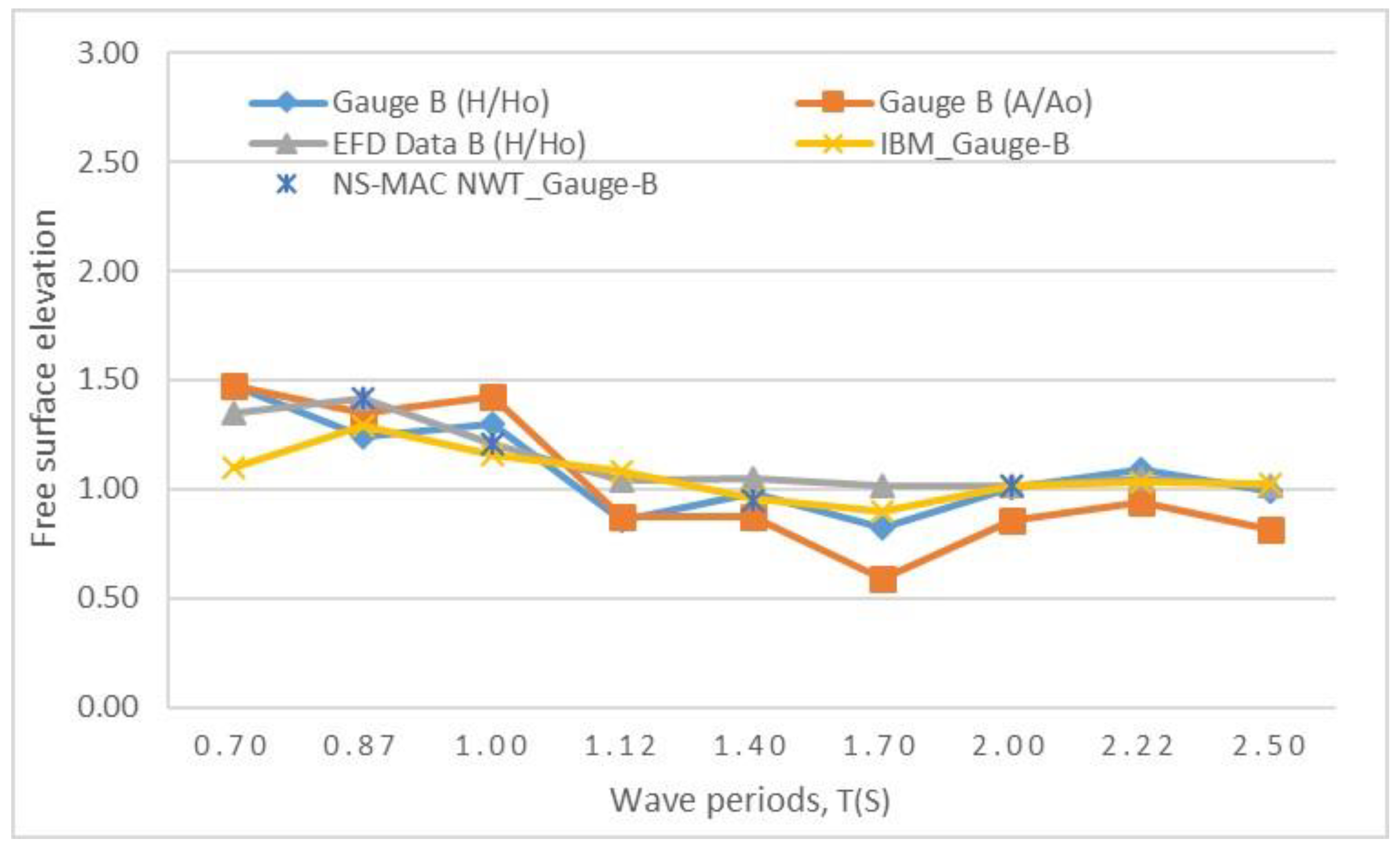
Figure 6 shows surface elevation at the side of the cylinder, at location B. The results show that only for short wave length cases, the incident wave becomes distorted at the side; however, for relatively longer wave lengths, the incident wave height remains almost unchanged. The CFD results here capture the resulting trend, however, they show oscillatory predictions around the EFD data, that is, some cases are over predicted and others are under predicted. Nevertheless, the overall deviation is minimum. Also, for these cases, CFD shows better agreement than the NS model.
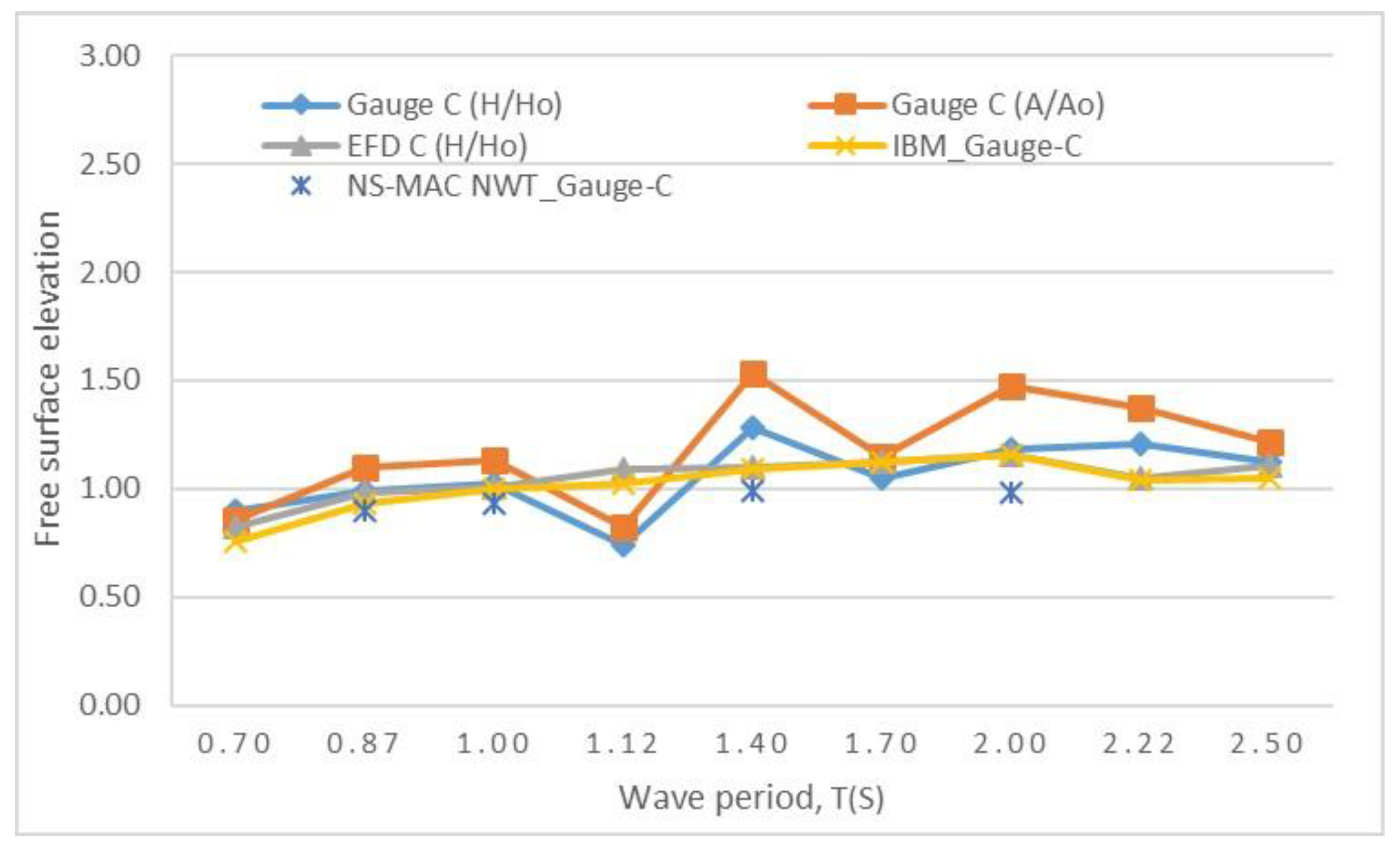
Figure 7 gives free surface elevation just behind the cylinder (location C). It is observed that the diffraction effect is minimum behind the cylinder and the simulations results here capture the trend well, with relatively notable deviation for three cases. For short wavelengths, the waves lose amplitude while interacting with the cylinder and thus show a lower steepness behind the cylinder. As the wave period and height increases, the loss in steepness decreases and the waves end up gaining slight amplitude due to the interaction with the cylinder. However, none of the amplitude gains actually represent a gain in energy, rather just a sudden transfer of energy.
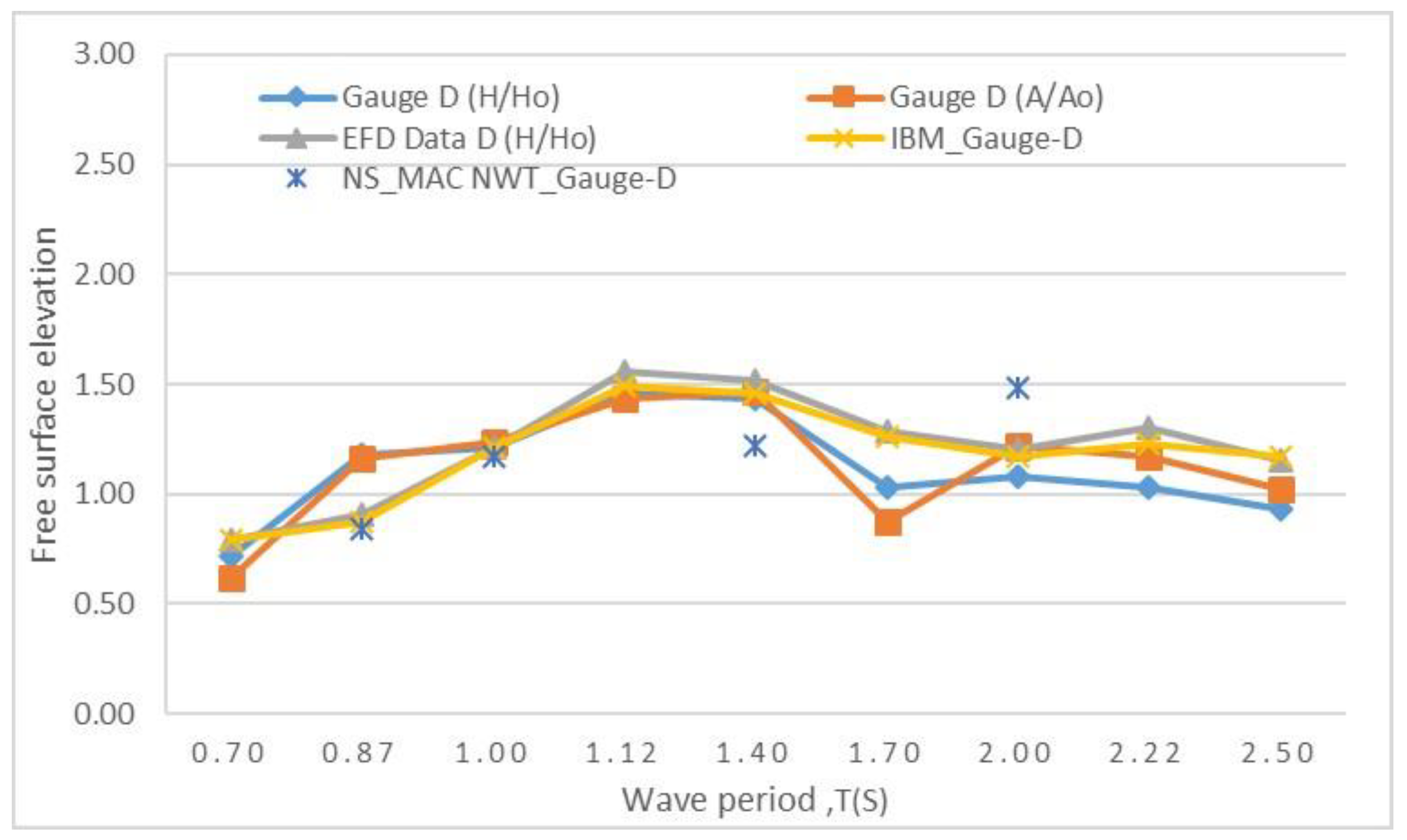
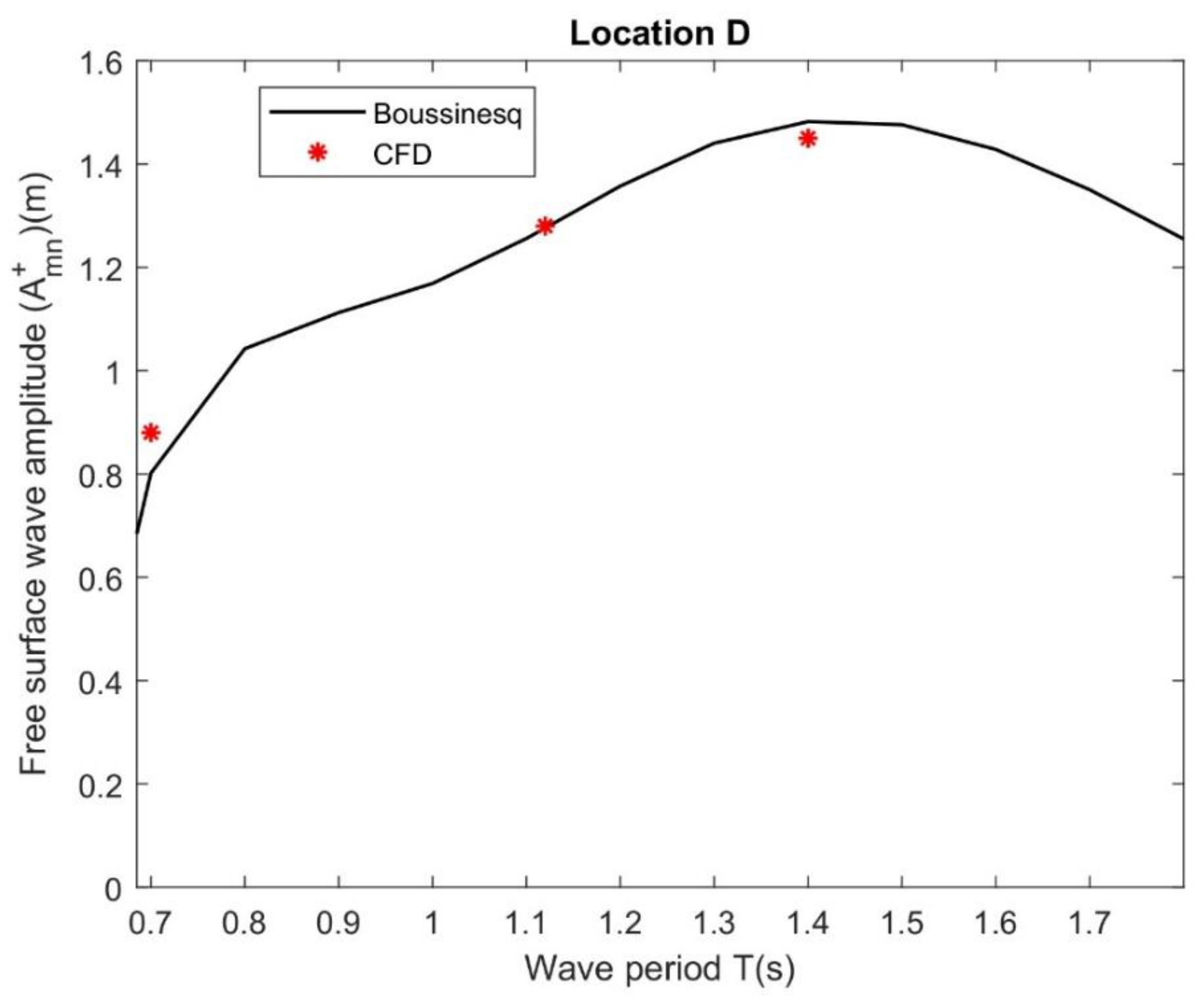
In
Figure 8 and
Figure 9, the comparison between CFD, experimental, and numerical data in location D and E are shown, which represent free surface elevation at 0.48 m before and at the side of the cylinder. The results show that the effect of the wave and structure interaction can also be observed at roughly one radial distance from the cylinder. As before, the CFD results capture the trend well, with deviation in the values for several cases.
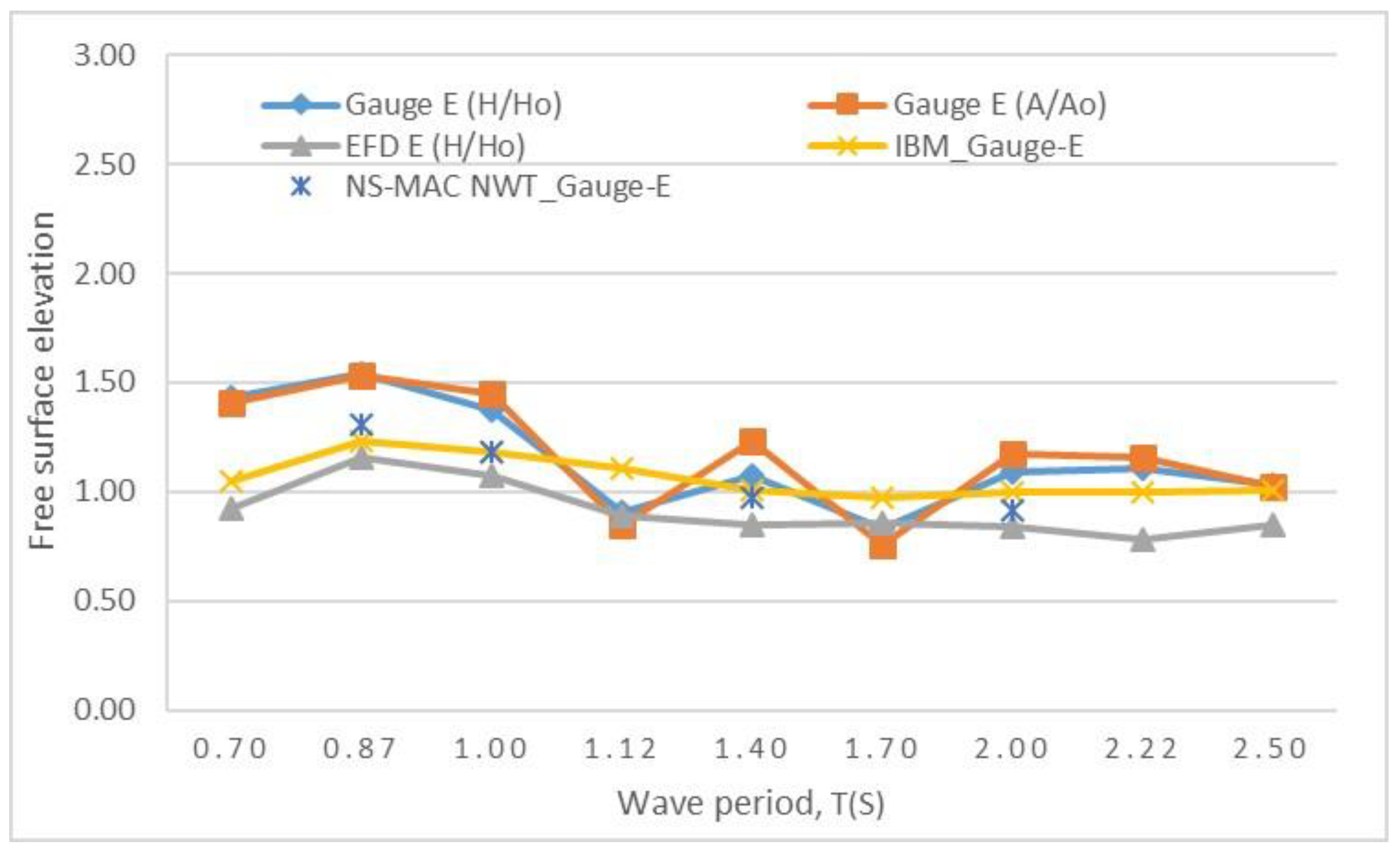
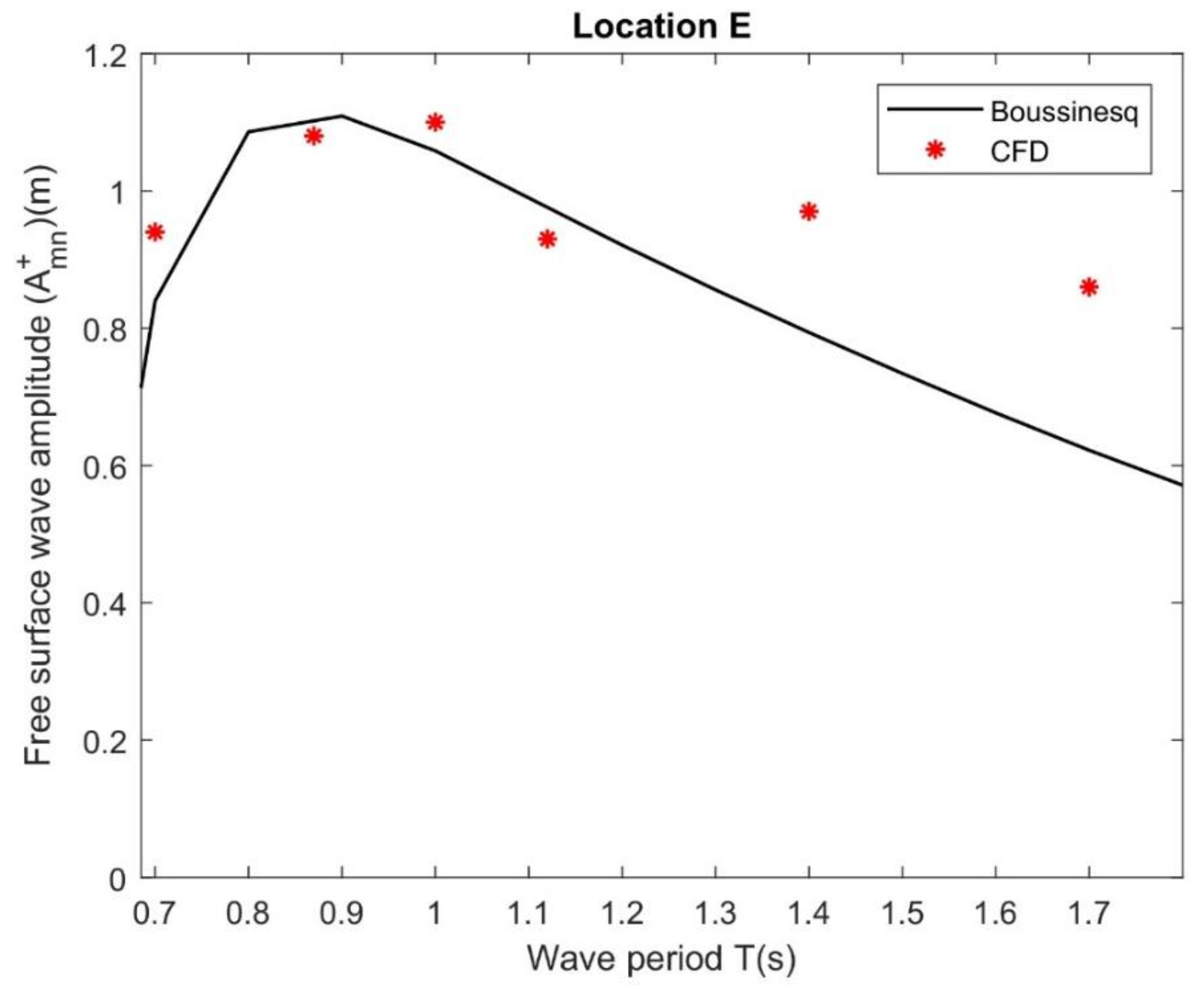
Especially, in case of
Figure 9 (position E), the CFD values show relatively high deviation from experimental values, except for three cases. The reason for this over prediction may partly be explained by the relatively short width of the domain in the sides. Because of the slight reflection of the waves by the symmetry planes, the elevations might have been over predicted. Increasing the domain size in the lateral direction might have improved the prediction, however, considering the added computational expense, it was avoided.
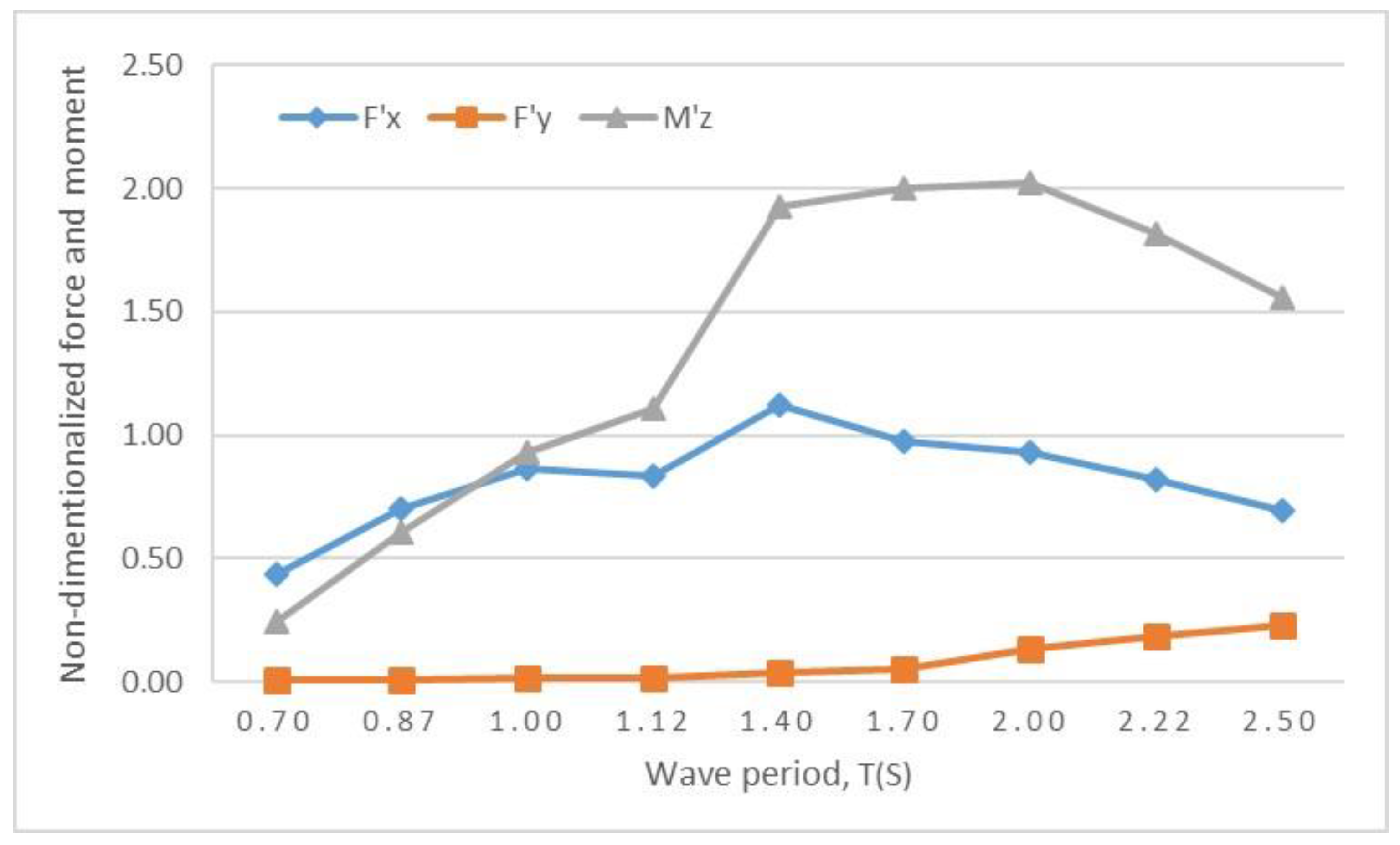
Next, horizontal and vertical forces and pitch moment acting on the cylinder were computed from the simulation results. For non-dimensionalization of the results, the following equations were used.
where
Fx,
Fy and
Mz represent horizontal and vertical force and pitch moment, respectively,
is the fluid density,
g is gravitational acceleration,
is the cylinder radius,
T is the cylinder draft and
H is the incident wave height.
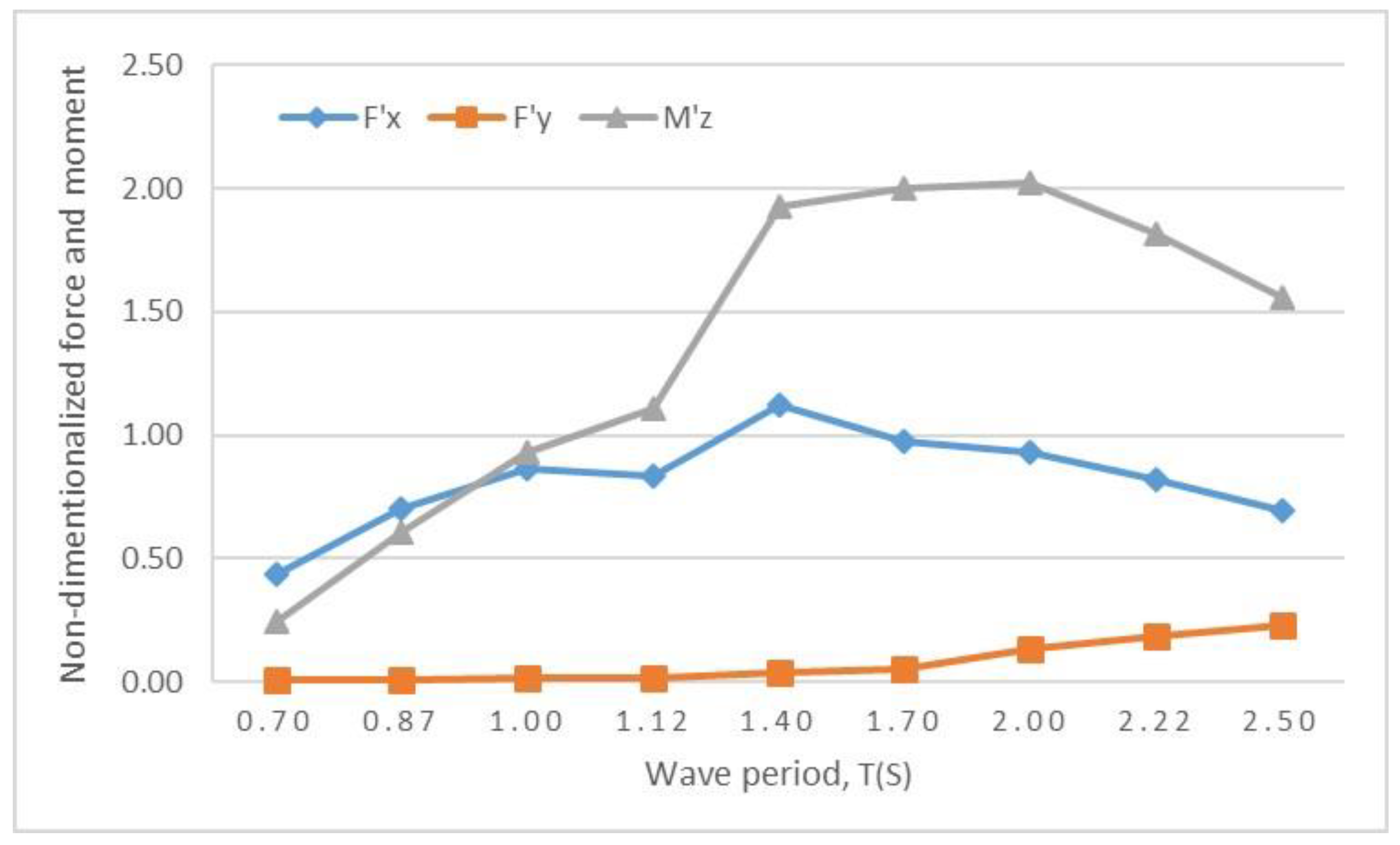
In
Figure 10, the horizontal force, vertical force, and moment acting on the cylinder versus wave period are plotted. It is observed that both the horizontal force and pitch moment show similar response with peak amplitude being observed close to the 1.70 wave period. The force and moment decrease for relatively low and high frequency range. Whereas, for the heaving force, it keeps on increasing with the increasing wave period and wave height. This might be because the structure is fixed and is not free to heave with incoming incident waves. With heave-free motion, the results might be slightly different.
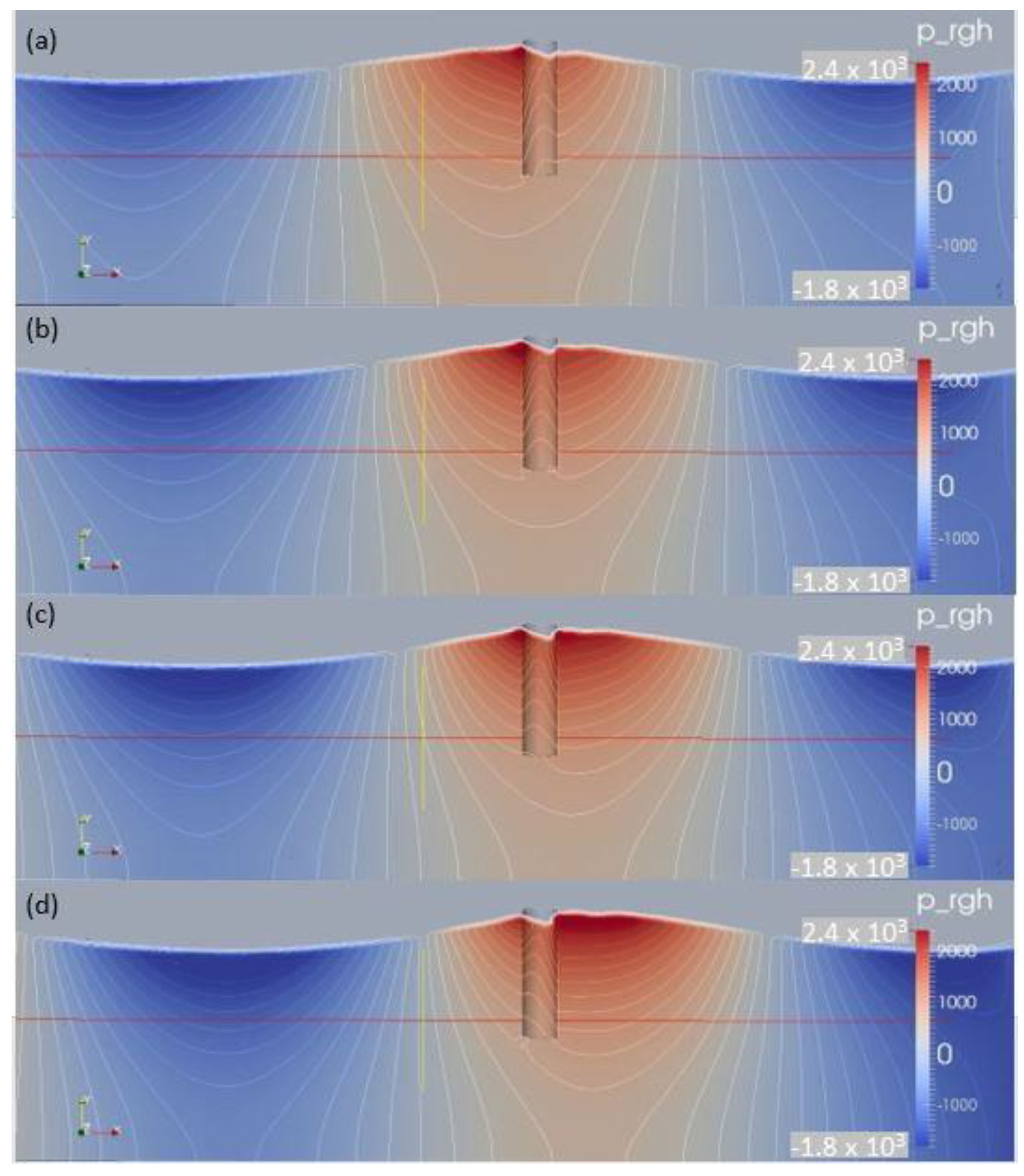
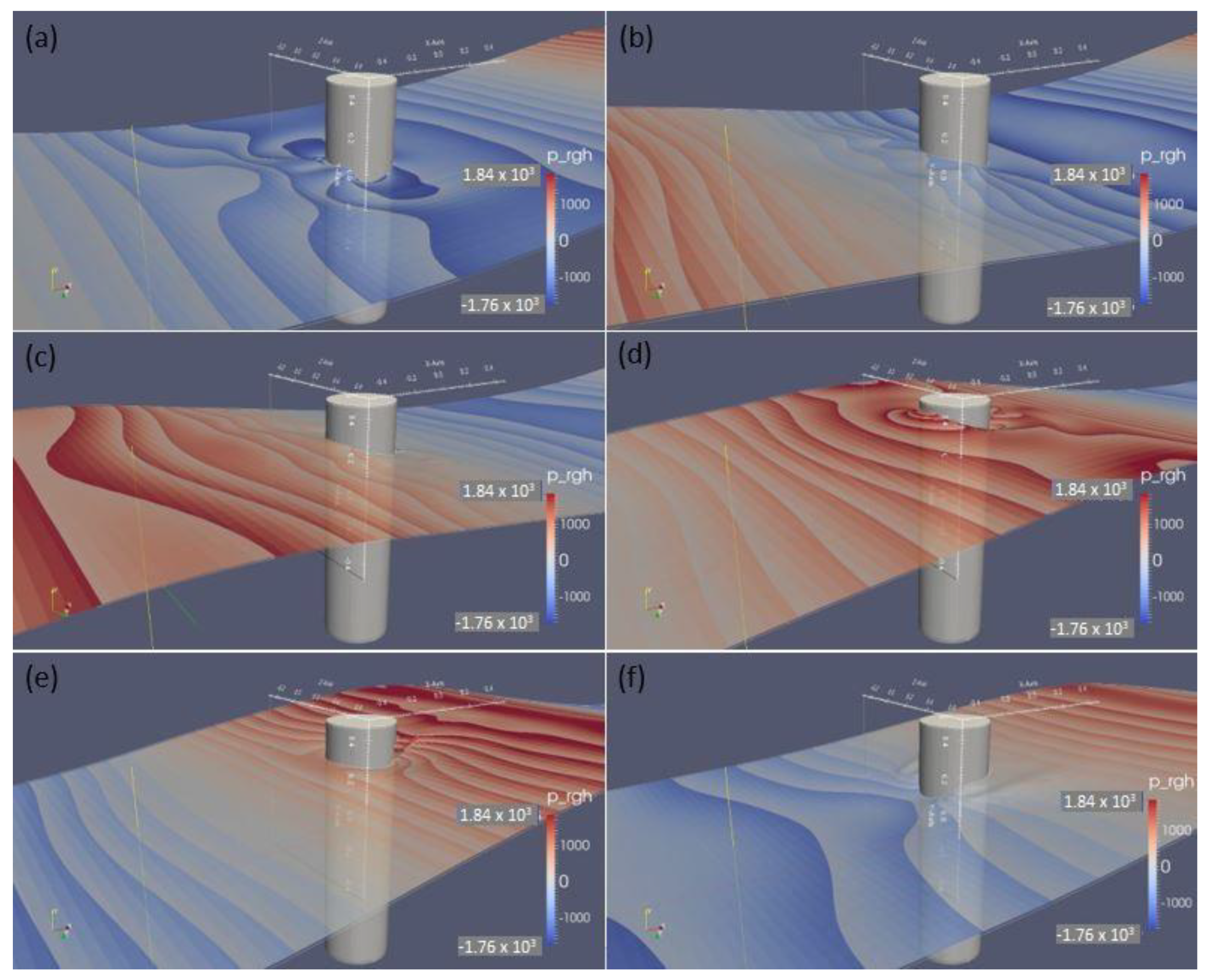
To further illustrate the CFD results, the pressure distribution in the simulation domain is shown in
Figure 11 and
Figure 12. The figures show the change of pressure in the domain due to the interaction between the cylinder and the incoming waves. They also show the disturbance in the incoming incident waves due to interaction with the diffracted waves by the cylinder.
Figure 11 shows the interaction of the wave crest with the vertical cylinder. The cylinder encounters high horizontal pressure during the interaction, as can be seen from the deep red color near the free surface. The horizontal pressure gradually fades away with increasing water depth. The contours on the cylinder also show the vertical (upward) force encountered by the cylinder during the wave interaction.
Figure 12 shows both the pressure distribution on the free surface during the wave encounter by the cylinder and also reference axis for observing the free-surface elevation. The figure shows how the free surface deforms around the cylinder during wave propagation. The cylinder faces low pressure at the wave trough and the free surface is close to −0.23. Next, the wave passes and when the cylinder encounters the wave peak, there is a jump of the free surface at the front of the cylinder and the wave reaches a height of roughly 0.3. During the wave encounter, the elevation of the free surface at the side and behind the cylinder is lower than that at the front.
4.2. Comparison of Analytical Boussinesq Model (BM) Results against CFD Simulations
A MATLAB code is developed to compute the Bessel and Hankel functions in the analytical solutions using built-in sub-routine Matlab to present numerical results of Boussinesq solutions for locations A, B, C, D, and E (as discussed in
Section 3 and labeled in
Figure 3).
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
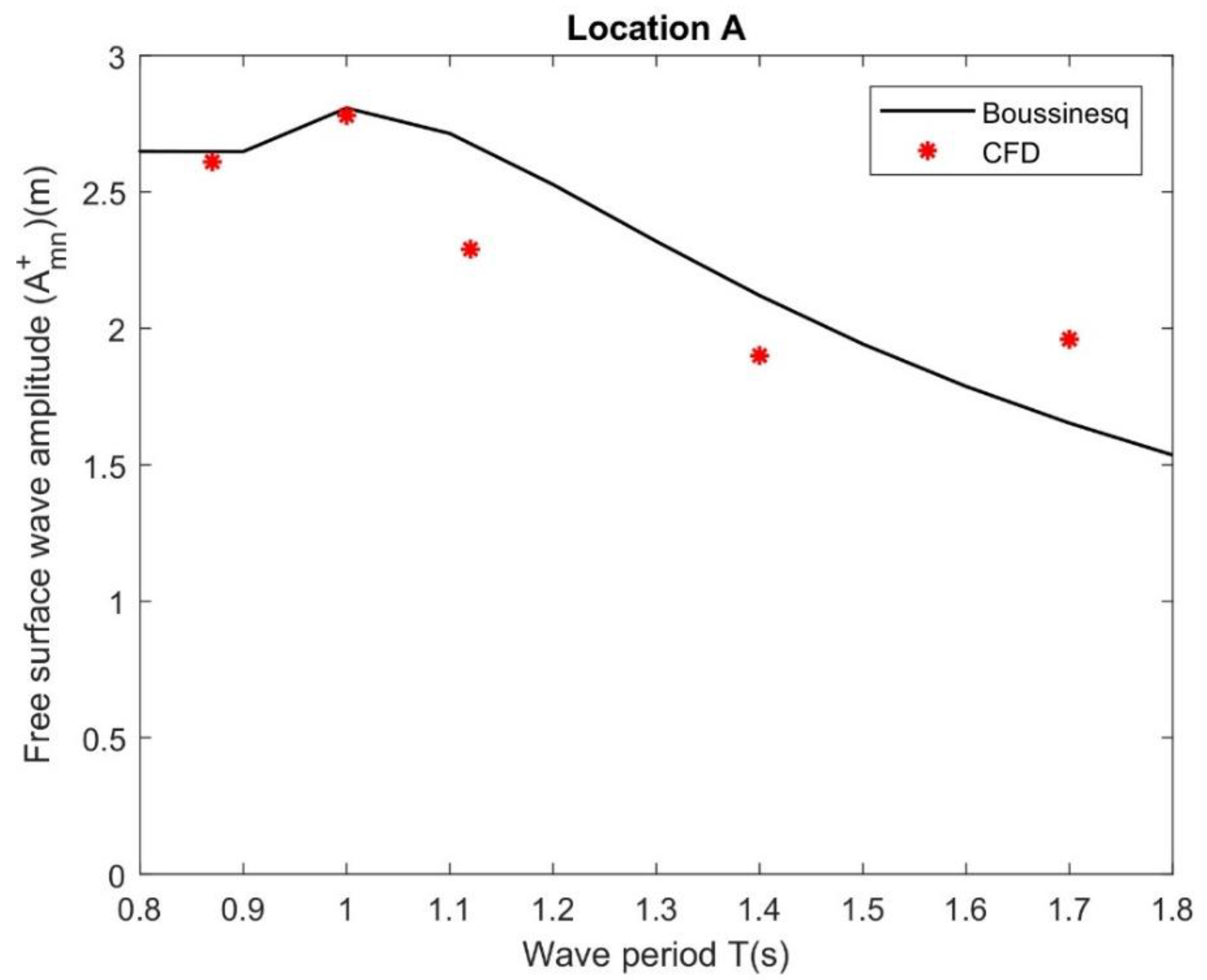
Figure 17 show the comparisons of results of Boussinesq second-order super-harmonic wave amplitude
against CFD model simulations in the exterior region for locations A, B, D, C, and E, respectively, versus time period T(s). From
Figure 13 and
Figure 14, it is observed that the peak amplitude of the Boussinesq result agreed well and the wave amplitude trend is similar with CFD model results. However, the wave amplitude in location A is higher than that of location B.
In
Figure 15, the results of second-order super-harmonic wave amplitude
are in good agreement between the Boussinesq and CFD model simulations for a smaller wave period in location C (behind the cylinder). However, for higher wave period the results between the two models did not agree well although the trend is similar. This may be due to the numerical errors arising from time and spatial discretization that are more evident with the disagreement of the wave amplitudes in between two models. Furthermore, unlike the CFD simulations, the BM is based on the frequency domain and the numerical model requires some time for the forcing wave to be applied and to stabilize behind the cylinder (location C). This may be the reason to lead the discrepancy in comparison of the Boussinesq results and those of CFD simulations.
Figure 16 compares the results of second-order super-harmonic wave amplitude
between Boussinesq and CFD model for location D. It is observed that the peak amplitude and trend between the Boussinesq and CFD models are fully agreed. It suggests that the interaction of second-order wave amplitude and vertical cylinder exhibits similar behavior in their trends for both models. In
Figure 17, it is found that the observations are similar to those of
Figure 13 and
Figure 14. However, for the higher wave period, the CFD data points are a little far and they only agree in the trend, not their values. The reason is similar to those of
Figure 15.
The next subsection analyses the effect of second-order sub-harmonic waves on the different parameters associated with wave diffraction by a floating fixed truncated vertical cylinder.
4.3. Effect of Design Parameters on Second-Order Sub-Harmonic Wave Amplitudes
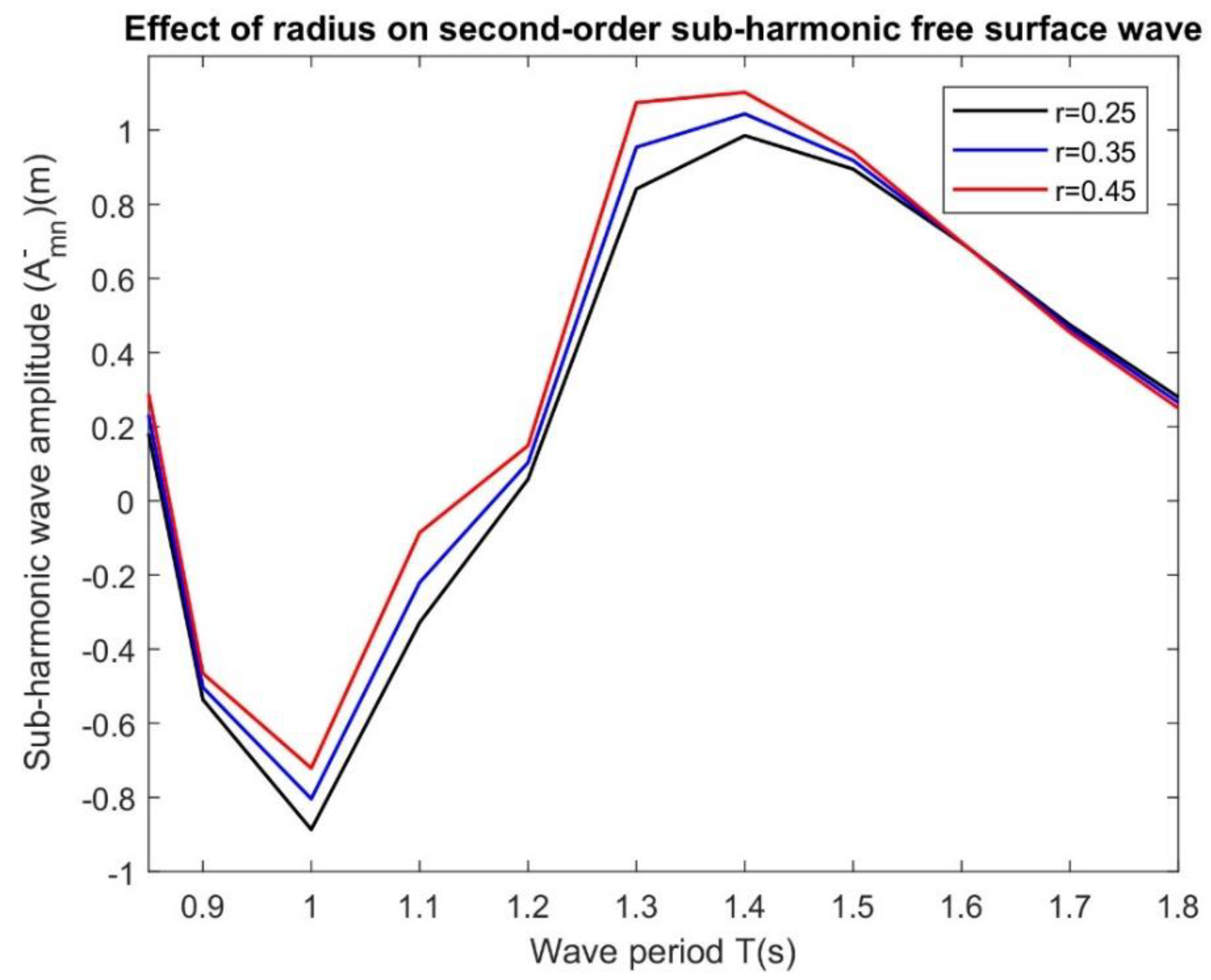
In
Figure 18, the effects of radius
r on second-order sub-harmonic wave amplitude.
at location B for
h = 4.0 m,
km = 0.84 and
zα = 0.5 versus wave period T(s) is plotted. It is observed that the second-order sub-harmonic wave amplitude
increases with an increase in the radius of the cylinder. The observations are similar to [
31] in the case of wave diffraction by a cylinder in two-layer fluids. This may be due to fact that as the cylinder occupied more water plane area, the large amount of incident wave energy concentrates around the structure and on the other hand, physically, this result may be from an increase in fluid momentum as the flow negotiates the cylinder.
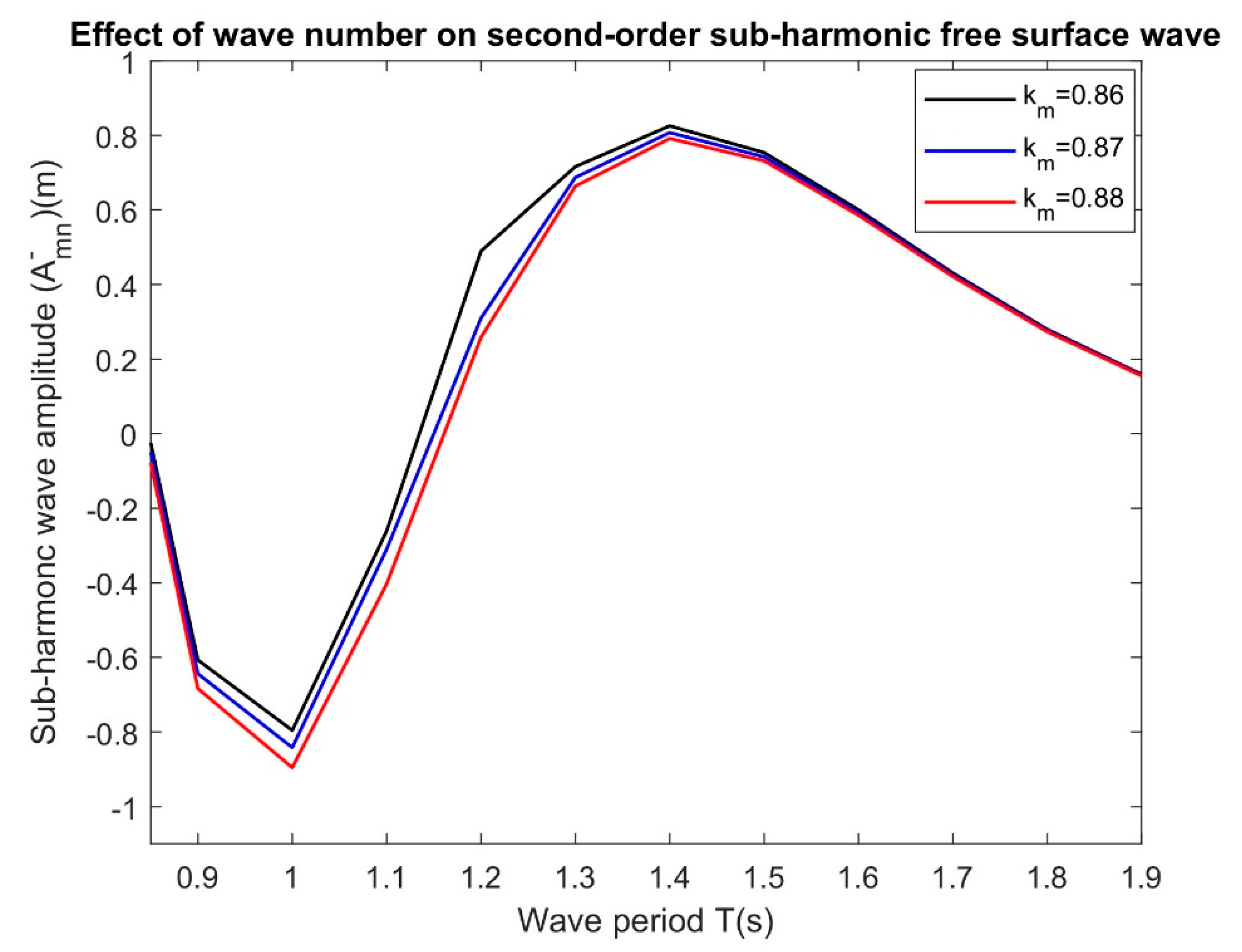
Figure 19 shows the effects of wavenumber
km on second-order sub-harmonic wave amplitude
at location B for
h = 4.0 m,
r = 0.35 m and
zα = 0.5 versus wave period T(s). It is observed that the second-order sub-harmonic wave amplitude
decreases with increase in wave number values. Moreover, the observation is similar to [
8]. Furthermore, it is seen that for higher wave period the variations of second-order sub-harmonic wave amplitude becomes negligible for fixed values of radius and for different wave number.
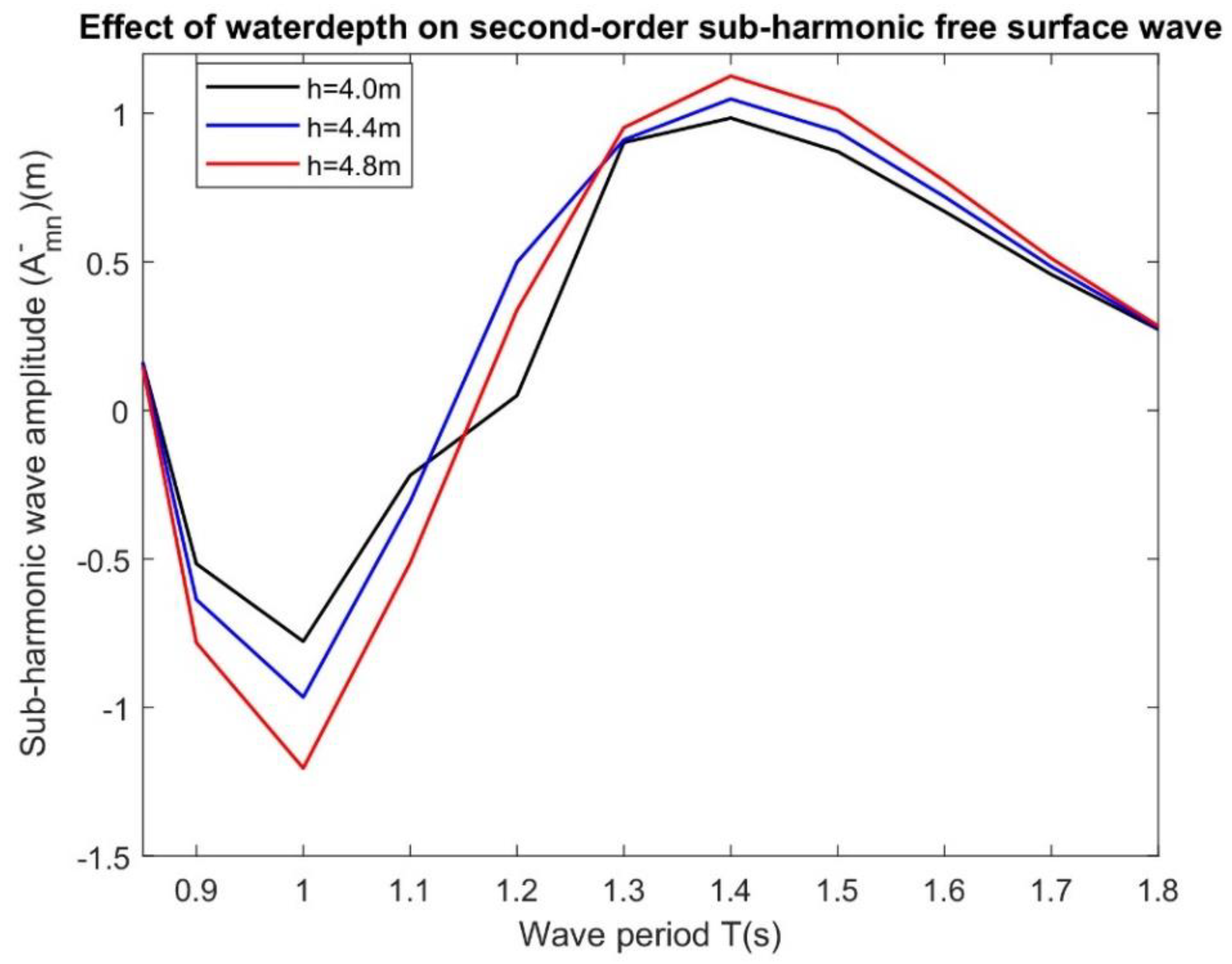
Figure 20 depicts the effects of water depth on second-order sub-harmonic wave amplitude
at location B with
r = 0.35 m,
km = 0.84 and
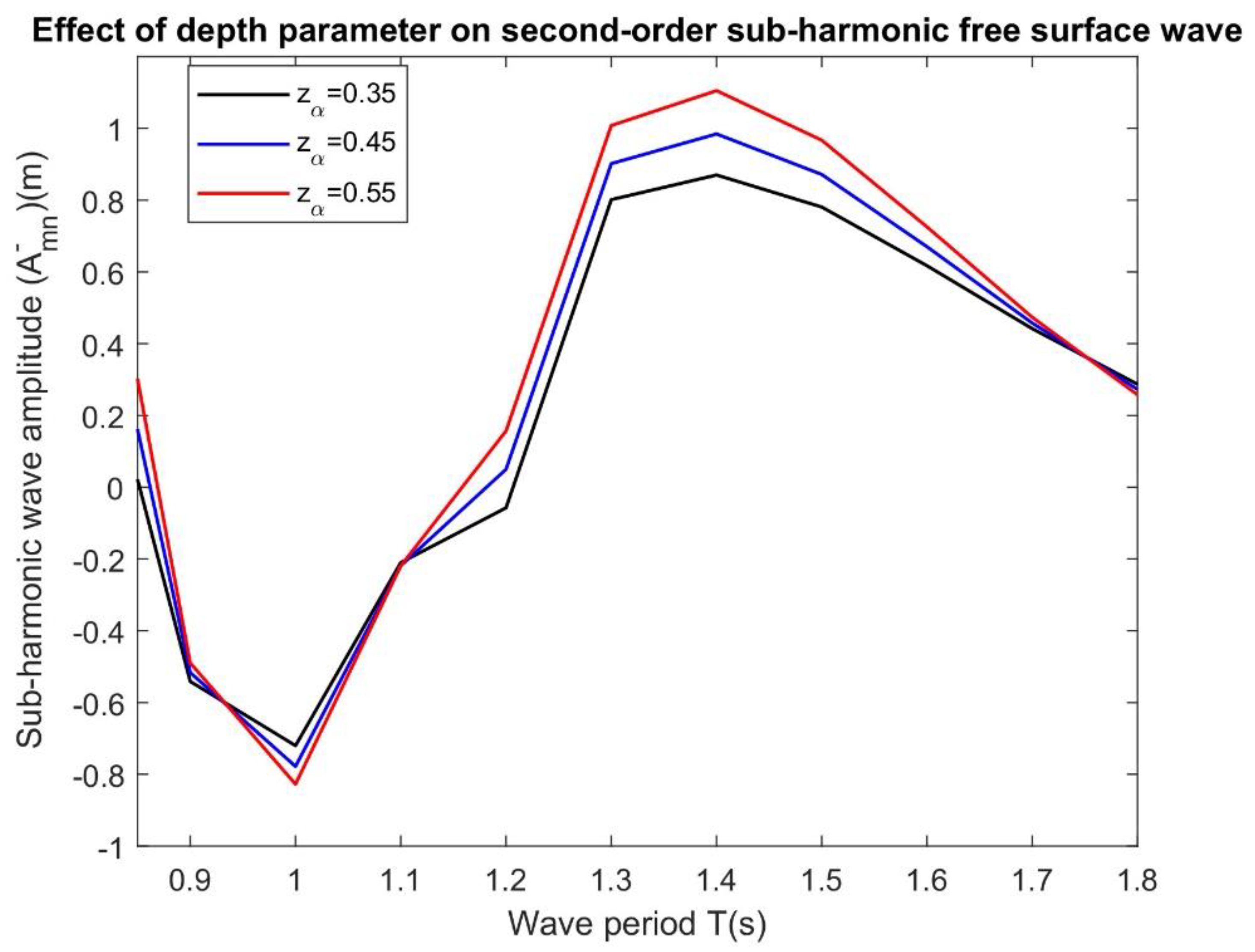
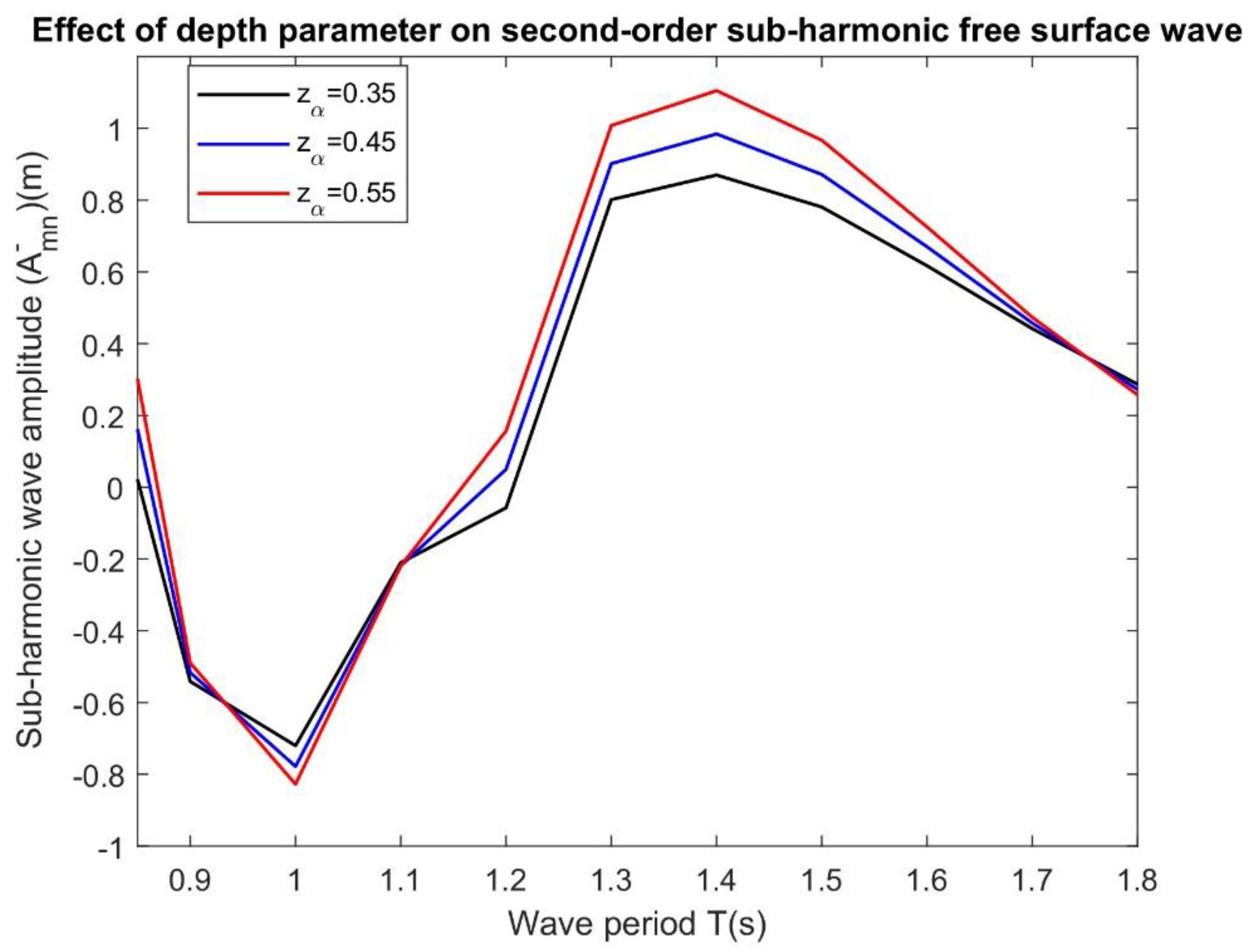
zα = 0.5 versus wave period T(s). Overall, it is observed that the sub-harmonic second-order wave amplitude decreases with the increase in water depths for higher values of the wave period. This is due to an increase in hydrostatic pressure, the force per unit is exerted by water on the floating cylinder. In
Figure 21, the effects of depth parameters on second-order sub-harmonic wave amplitude
at location B for
r = 0.35 m,
km = 0.84 and
h = 4.0 m, and versus wave period T(s) is plotted. It is observed that the second-order sub-harmonic wave amplitude
increases with increase in depth parameters whilst the effect is negligible for a smaller wave period.
All numerical computations associated with analytical expressions were performed in a desktop machine with Intel ® core i7-4790 CPU with 3.60GHz processor and 32 GB of ram memory. On an average, each case took roughly 10–15 min to finish.
5. Discussion
In the theoretical perspective, the contribution of the present boundary value problem is the formulation associated with wave diffraction by a floating fixed truncated vertical cylinder based on Boussinesq-type equations using Bessel’s and Hankel’s functions, which lead to further formulation of the second-order free surface elevation displacement and velocity potentials in the exterior domain. Therefore, importantly, the comparisons of super-harmonic wave amplitude for different probe locations between BM, numerical CFD simulations, experimental, and other numerical data, and some other effects are also discussed in the succeeding paragraphs.
Initially, in order to show efficiency and level of exactness of the CFD model simulations relative to other methods, the results of wave amplitudes and wave heights from CFD are compared against EFD and numerical data available in the literature for the different probe locations. It is found that the CFD results here show reasonable agreement with experimental data; although the values do not exactly agree, the trend is well captured. For almost all cases, CFD under predicts the results compared to EFD results. The slight deviation might be explained to some extent by the location of the probe in CFD model. In CFD, the probe was set 5 mm away from the cylinder, whereas, in experiments, it was exactly on the cylinder. This could not be done in the CFD model since probes in simulation can only capture data from a cell, not at voids. The numerical dissipation of incoming waves and instability of the turbulence model at the free surface also contributes to the under prediction. In general, the CFD results agree better with the NS model results, compared to the immersed boundary method results, since the present CFD model also follows the RANS model. Overall, the CFD results show reasonable agreement with the experimental and other numerical data, as presented in
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9.
Then, the numerical results of second-order super-harmonic wave amplitudes obtained from BM are compared with CFD results in the same probe locations. It is observed that the peak amplitudes are in good agreement between the two models and the trend of the wave profiles are similar in nature for all cases, as shown in
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
Figure 17. However, the CFD data points are little far from the BM results. These differences can be justified by the full non-linearity solution and viscous effects of the CFD model, while the solution of the analytical model is only of second-order. However, the comparison showed that the developed BM is supported by the numerical CFD model which indicates that the BM may be reliable for concept validation and further enhancement of the model to study motion characteristics of the cylinder to design a floating point absorber wave energy converter.
Regarding the force and pressure distribution analysis, it may be mentioned that the value of the horizontal force is in between the vertical force and moment acting on the vertical cylinder. The peak amplitude of moment is higher than those of horizontal and vertical force. Regarding the pressure distribution around the cylinder, it is found that during the wave encounter, the free surface elevation at the side and behind the cylinder is lower than that at the front probe location.
Finally, the effects of radius, wave number, water depth, and depth parameters on the second-order sub-harmonic wave amplitudes from the Boussinesq results are analyzed, as presented in
Figure 18,
Figure 19,
Figure 20 and
Figure 21. It is observed that the second-order subharmonic waves around the cylinder are negative for all cases whilst, in the same range the super-harmonic waves are positive as presented in
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
Figure 17. Furthermore, it is seen that the effects of the second-order on super-harmonic waves for free surface wave profiles around the cylinder are stronger than those of sub-harmonics as in [
8].






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}