A Comparison of Numerical Simulations and Model Experiments on Parametric Roll in Irregular Seas



Abstract
Nomenclature
| Symbol | Unit | Description |
| Aφφ | ton.m2 | Roll added moment of inertia |
| B | m | Beam |
| B1 | kNms | Linear component of roll damping |
| B2 | kNms2 | Quadratic component of roll damping |
| B3 | kNms3 | Cubic component or roll damping |
| BCR | kNms | Critical roll damping |
| Cφφ | kNm | Roll restoring moment |
| Fn | - | Froude number, |
| F4 | kNm | 4th component of force (roll moment) |
| F4a | kNm | Amplitude of roll moment |
| g | m/s2 | Acceleration due to gravity |
| GM | m | Transverse metacentric height |
| Hs | m | Significant wave height |
| Iφφ | ton.m2 | Roll moment of inertia |
| KG | m | Height Centre of Gravity (CoG) above keel |
| Lpp | m | Length between perpendiculars |
| t | s | time |
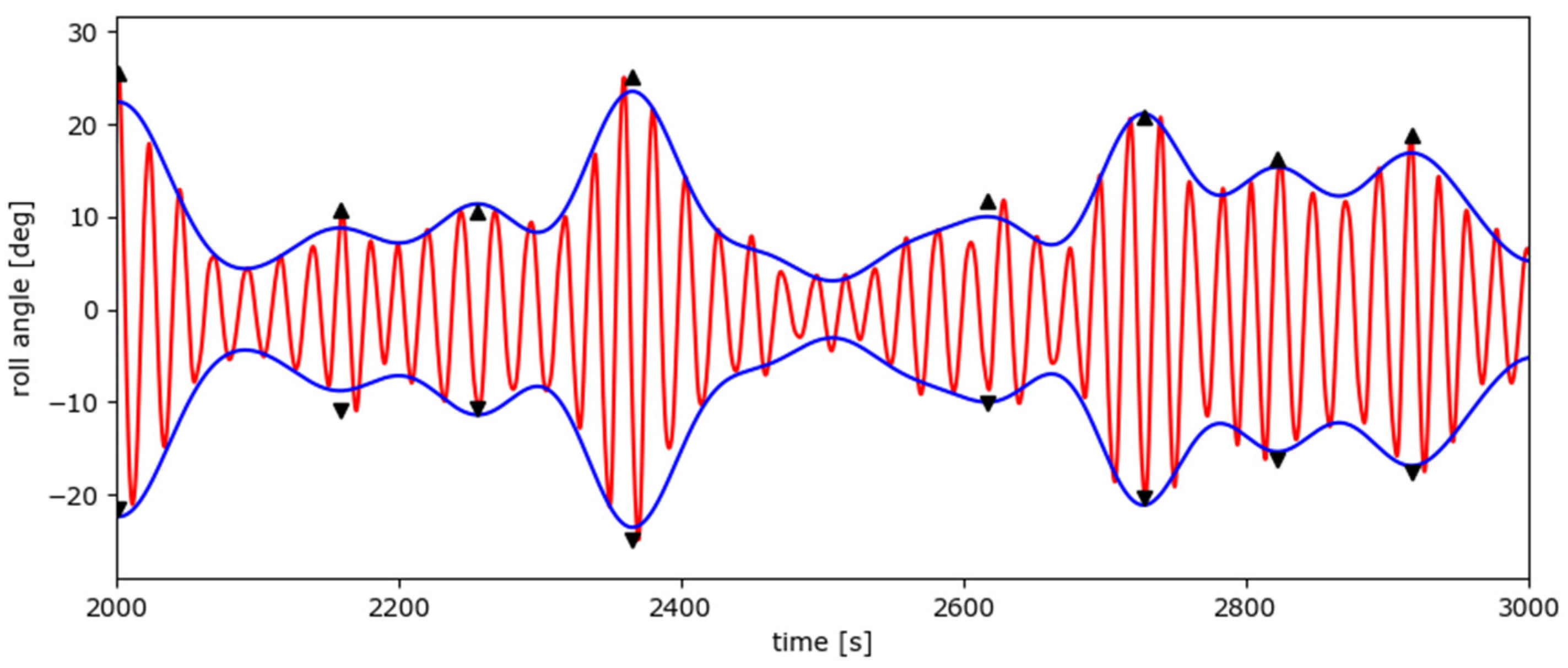
| tP-ENV | s | Time instant of the peak of a parametric roll event in a roll angle signal |
| T | m | Draft |
| Tp | s | Peak period of the wave spectrum |
| Tφ | s | Roll natural period |
| kxx | m | Roll gyradius |
| kxx * | m | Roll gyradius including added mass |
| kYY | m | Pitch gyradius |
| p | - | Linear roll damping coefficient |
| q | - | Quadratic roll damping coefficient |
| r | - | Cubic roll damping coefficient |
| Vs | kn | Ship speed |
| Vs-av | kn | Average ship speed in a sea state |
| γ | - | Peakedness parameter of Jonswap wave spectrum |
| Δ | ton | Displacement |
| ε | rad | Phase angle |
| ζa | m | Wave amplitude |
| φ | rad | Roll angle |
| φa | rad | Roll angle amplitude |
| ω0 | rad/s | Earth fixed wave frequency |
| ωe | rad/s | Wave-encounter frequency |
1. Introduction
2. Experiments
3. Numerical Methods
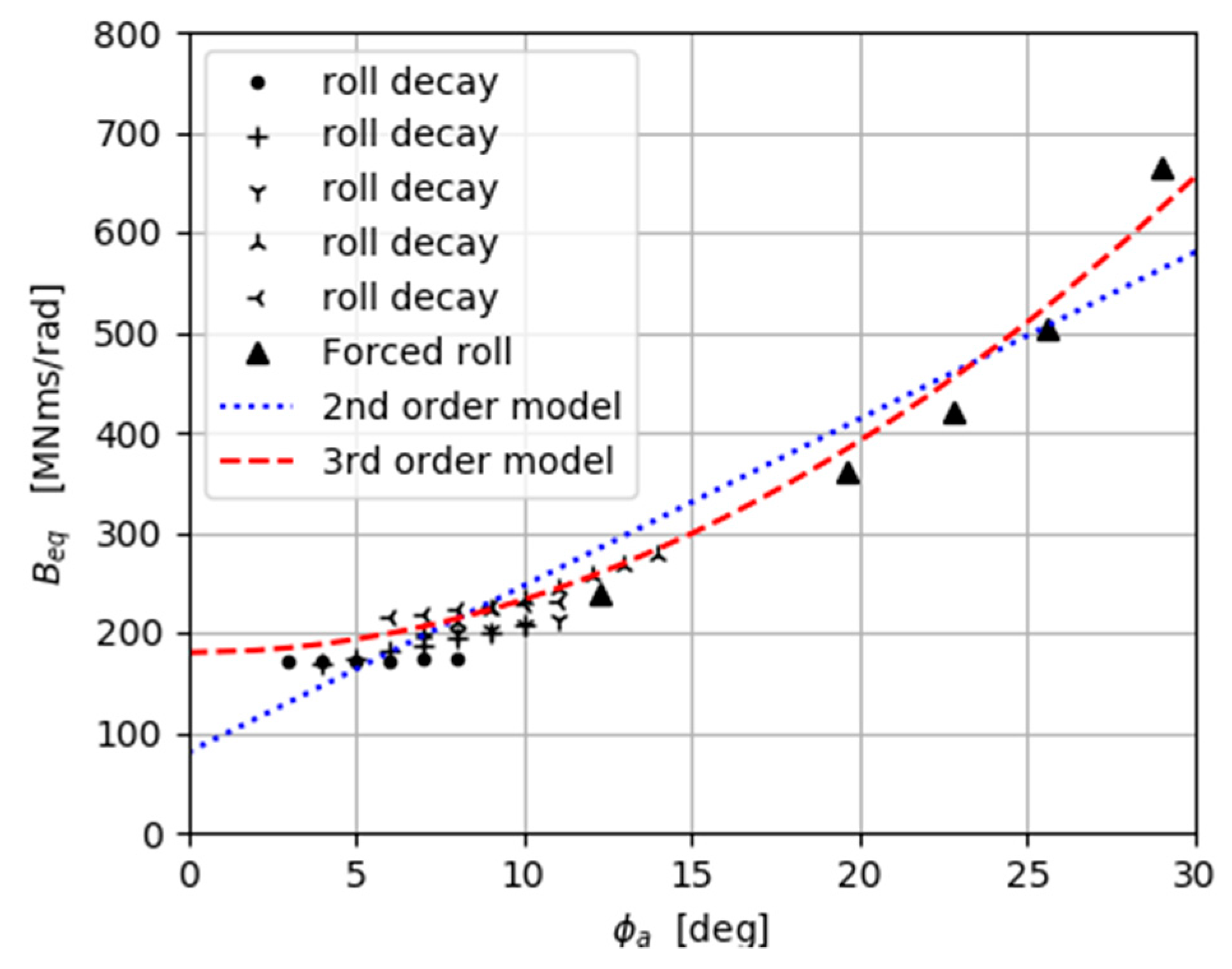
4. Results of Roll Decay and Forced Roll Tests
5. Probabilistic Analysis of Results
5.1. Analysis of Parametric Roll Events
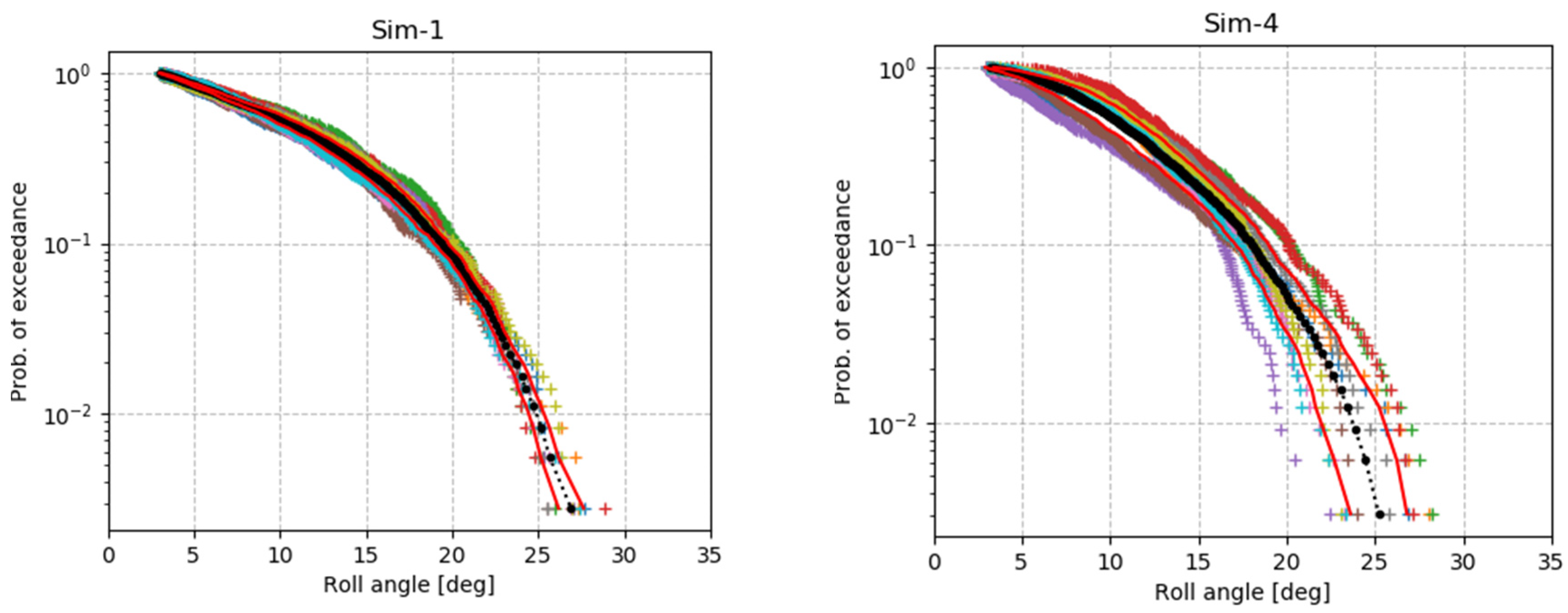
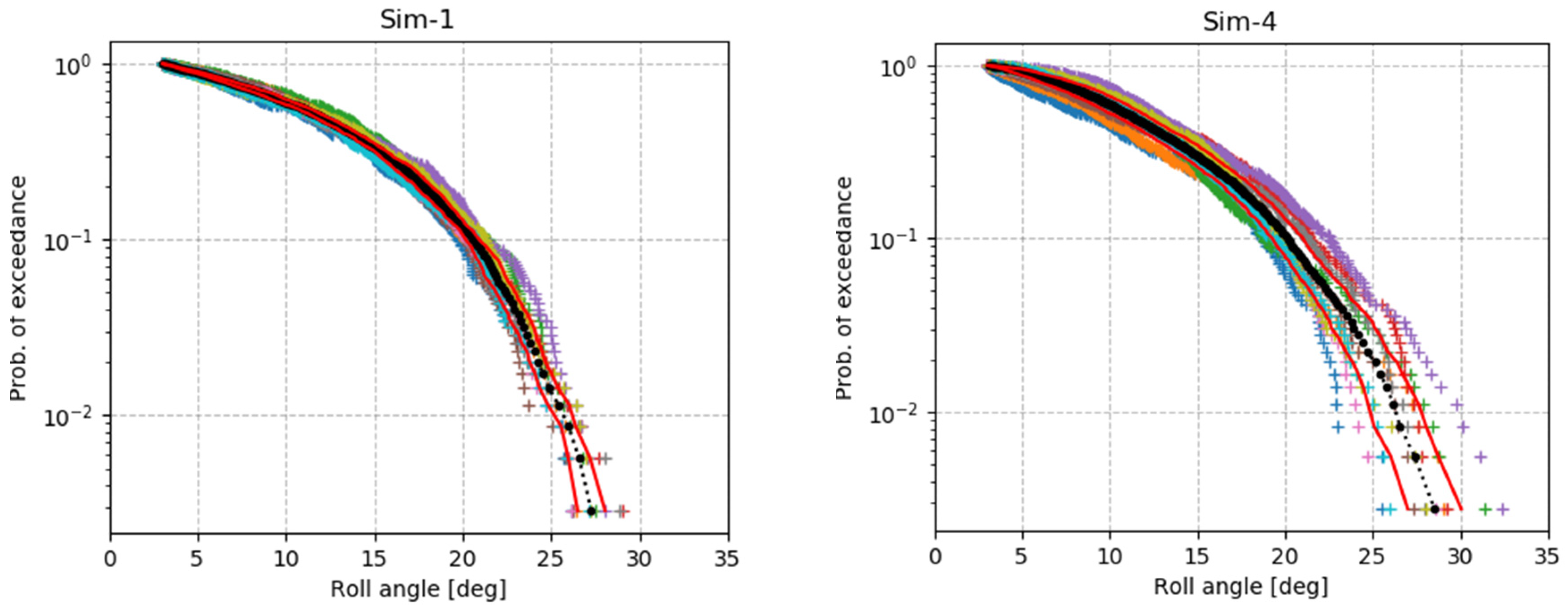
5.2. Analysis of Extreme Roll Angles
5.3. Deterministic Analysis of Results
6. Overview of Experimental Results
7. Comparison of Results in Head Seas
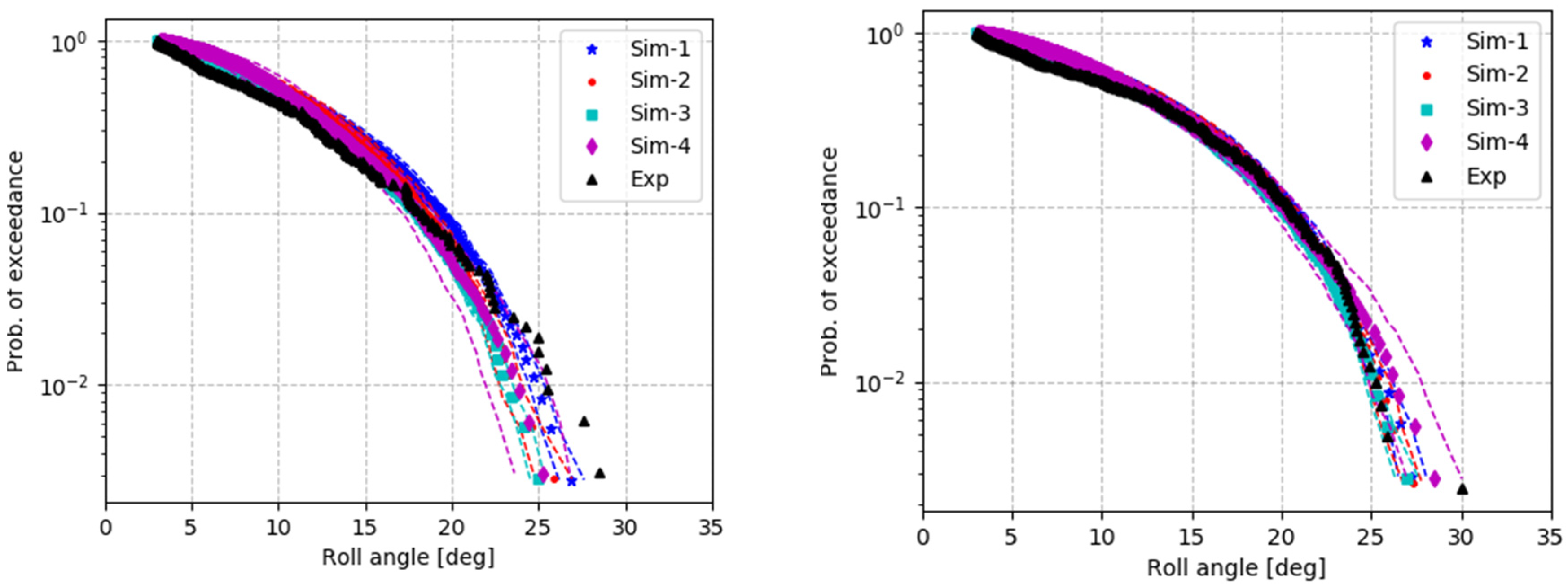
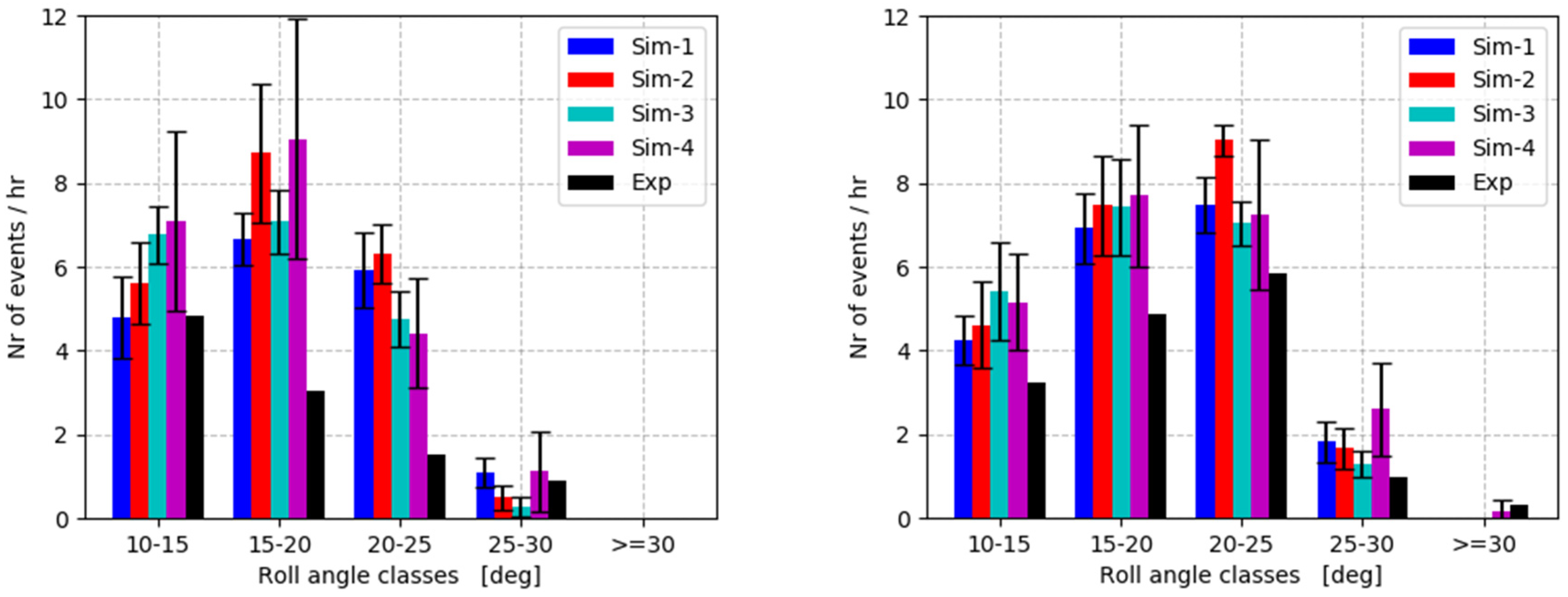
7.1. Probabilistic Analysis
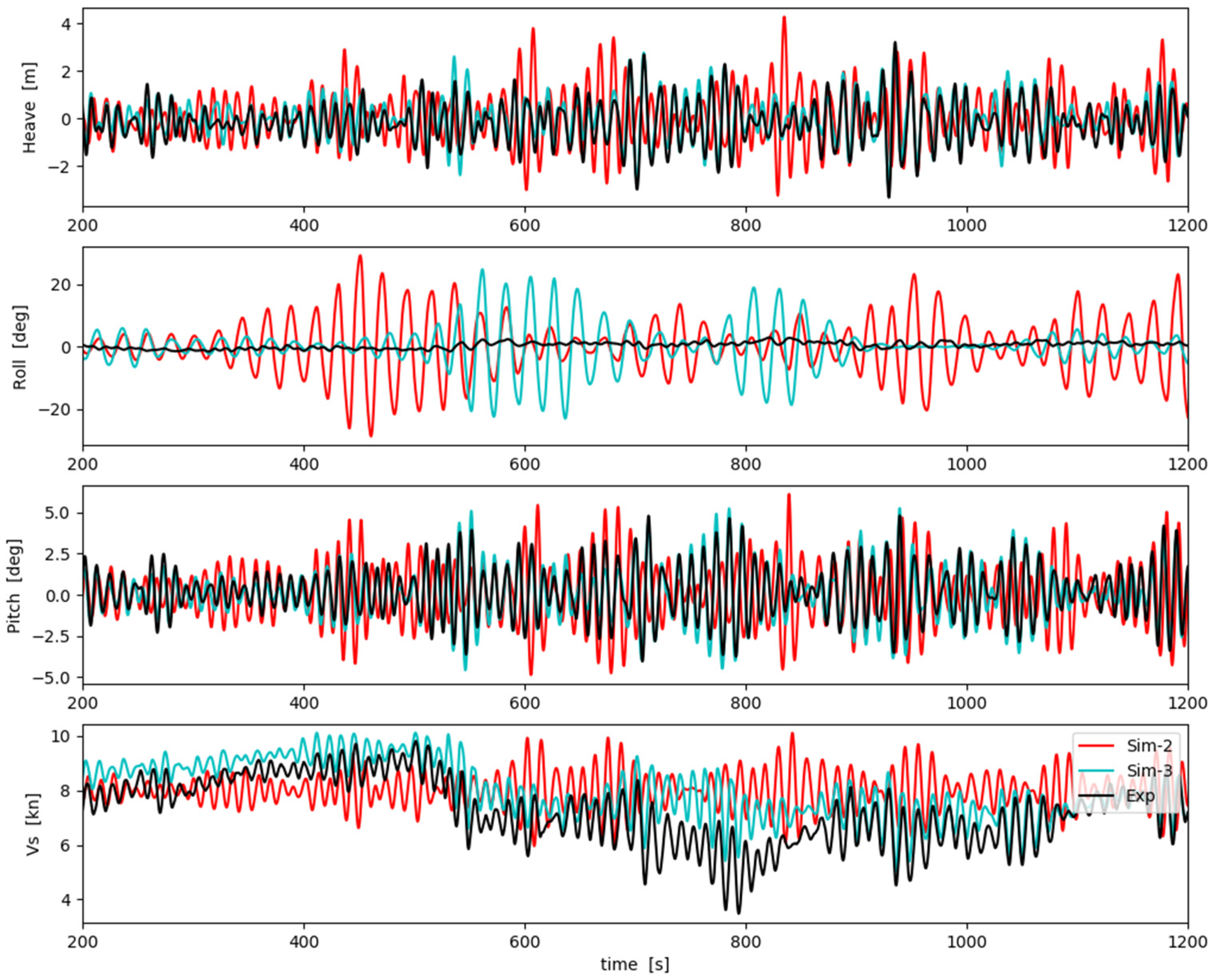
7.2. Deterministic Analysis
8. Comparison of Results in Following Seas
8.1. Probabilistic Analysis
8.2. Deterministic Analysis
9. Discussion
9.1. Objective
9.2. Modelling the Waves
9.3. Variation in the Stability
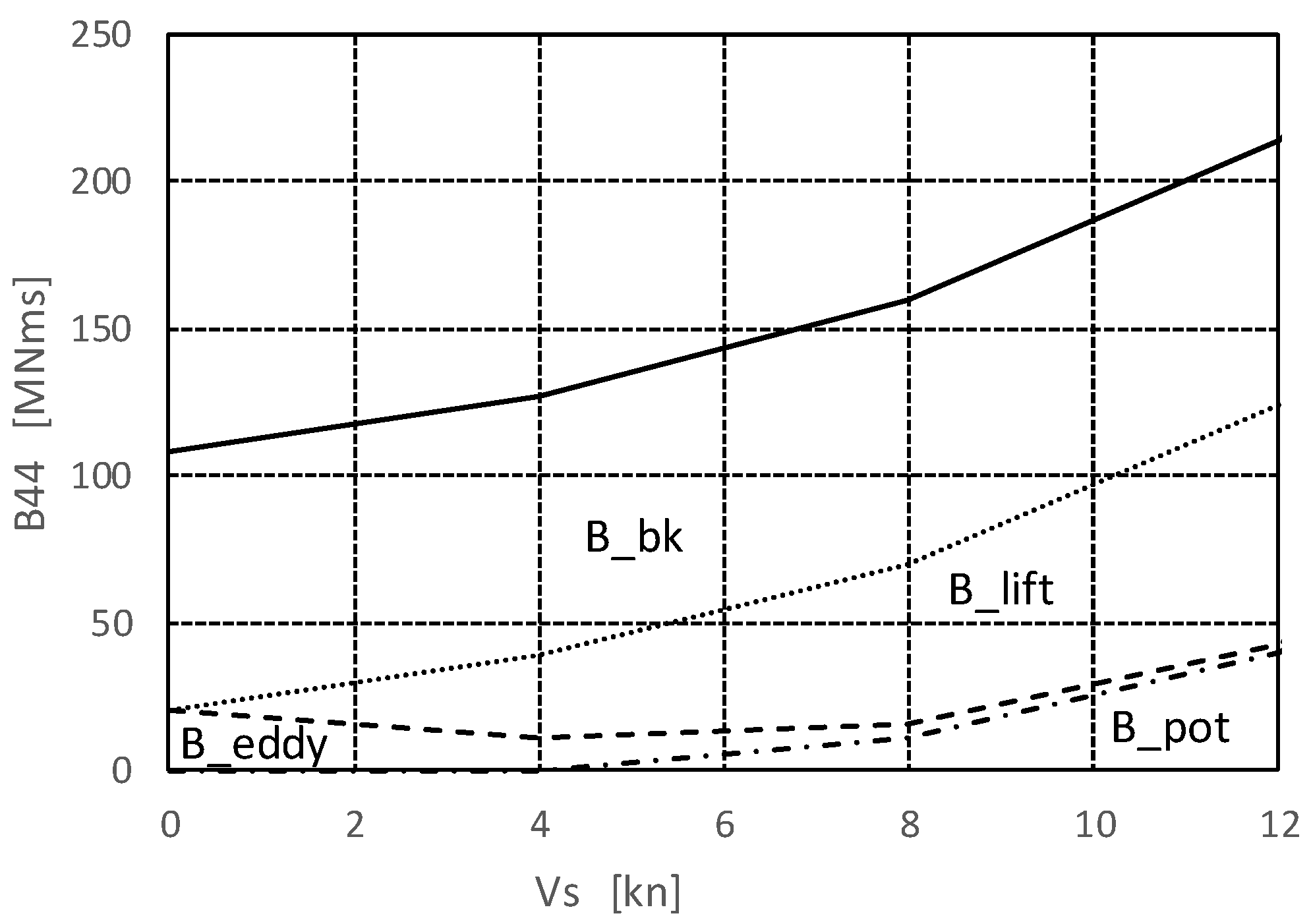
9.4. Roll Damping
9.5. Relation between Parametric Roll Amplitude and Wave Height
9.6. Nonlinear Diffraction
9.7. Effect of Water on Deck
10. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IMO. Report of the Drafting Group on Intact Stability, Finalization of Second Generation Intact Stability Criteria; IMO Document SDC 7/WP; IMO: London, UK, 2020. [Google Scholar]
- IMO. Report of the Correspondence Group on Intact Stability, Finalization of Second Generation Intact Stability Criteria; IMO Document SDC 4/5/1/Add; IMO: London, UK, 2016. [Google Scholar]
- Cooperative Research Ships. Available online: http://www.crships.org/web/show (accessed on 7 May 2020).
- Kapsenberg, G.K.; Abeil, B.; Kim, S.; Wandji, C.; Ruth, E.; Pages, A. On parametric roll predictions. In Proceedings of the 17th International Ship Stability Workshop (STAB2019), Helsinki, Finland, 10–12 Jun 2019. [Google Scholar]
- France, W.; Levadou, M.; Treakle, T.W.; Paulling, J.R.; Michel, R.K.; Moore, C. An investigation of head-sea parametric rolling and its influence on container lashing system. Mar. Technol. 2003, 40, 1–19. [Google Scholar]
- Spanos, D.; Papanikolaou, A. Benchmark Study on Numerical Simulation Methods for the Prediction of Parametric Roll of Ships in Waves. In Proceedings of the 10th International Conference on Stab of Ships and Ocean Vehicles (STAB2009), St Petersburg, Russia, 22–26 June 2009. [Google Scholar]
- Reed, A.M. 26th ITTC Parametric Roll Benchmark Study. In Proceedings of the 12th International Ship Stability Workshop (STAB2011), Washington, DC, USA, 12–15 June 2011. [Google Scholar]
- Ikeda, Y.; Himeno, Y.; Tanaka, N. On Eddy Making Component of Roll Damping Force on Naked Hull; Report No. 00403; Un. of Osaka Pref., Dept. of Naval Arch.: Osaka, Japan, 1978. [Google Scholar]
- Ikeda, Y.; Himeno, Y.; Tanaka, N. Components of Roll Damping of Ship at Forward Speed; Report No. 00404; Un. of Osaka Pref., Dept. of Naval Arch.: Osaka, Japan, 1978. [Google Scholar]
- Ikeda, Y.; Himeno, Y.; Tanaka, N. On Roll Damping Force of Ship—Effect of Friction of Hull and Normal Force of Bilge Keels; Report No. 00401; Un. of Osaka Pref., Dept. of Naval Arch.: Osaka, Japan, 1978. [Google Scholar]
- Ikeda, Y.; Himeno, Y.; Tanaka, N. A Prediction Method for Ship Roll Damping; Report No. 00405; Un. of Osaka Pref., Dept. of Naval Arch.: Osaka, Japan, 1978. [Google Scholar]
- Ikeda, Y.; Komatsu, K. On roll Damping Force of Ship—Effect of Hull Surface Pressure Created by Bilge Keels; Report No. 00402; Un. of Osaka Pref., Dept. of Naval Arch.: Osaka, Japan, 1979. [Google Scholar]
- Himeno, Y. Prediction of Ship Roll Damping—State of the Art; Report No. 239; Un. of Michigan, Dept. of Naval Arch. and Marine Eng.: Ann Arbor, MI, USA, 1978. [Google Scholar]
- Hashimoto, H.; Omura, T.; Matsuda, A.; Yoneda, S.; Stern, F.; Tahara, Y. Some remarks on EFD and CFD for ship roll decay. In Proceedings of the 13th International Conference Stability of Ships and Ocean Vehicles (STAB2018), Kobe, Japan, 16–21 September 2018. [Google Scholar]
- Yu, L.; Ma, N.; Hirakawa, Y.; Taguchi, K.; Akagi, K. Free running model experiment and numerical simulation on the occurrence and early detection of KCS parametric roll in head waves. In Proceedings of the 13th International Conference Stability of Ships and Ocean Vehicles (STAB2018), Kobe, Japan, 16–21 September 2018. [Google Scholar]
- Yu, L.; Taguchi, K.; Kenta, A.; Ma, N.; Hirakawa, Y. Model experiments on the early detection and rudder stabilization of KCS parametric roll in head waves. J. Mar. Sci. Technol. 2018, 23, 141–163. [Google Scholar] [CrossRef]
- Ruiz, M.T.; Villagomez, J.; Delefortrie, G.; Lataire, E.; Vantorre, M. Parametric Rolling in Regular Head Waves of the KRISO Container Ship: Numerical and Experimental Investigation in Shallow Water. In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Eng. (OMAE2019), Glasgow, UK, 9–14 June 2019. [Google Scholar]
- Shin, Y.-S.; Belenky, V.L.; Paulling, J.R.; Weems, K.M.; Lin, W.M. Criteria for parametric roll of large containerships in longitudinal seas. In Proceedings of the SNAME Annual Meeting, Washington, DC, USA, 30 September 2004. [Google Scholar]
- Neves, M.A.S.; Rodríguez, C.A. A non-linear mathematical model of higher order for strong parametric resonance of the roll motion of ships in waves. Mar. Syst. Ocean Technol. 2005, 1, 69–81. [Google Scholar] [CrossRef]
- SIMMAN 2008 Workshop. Available online: http://www.simman2008.dk/KCS/container.html (accessed on 8 May 2020).
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, H.; Hasselmann, D.E.; Meerburg, A. Measurements of Wind-Wave Growth and Swell Decay during the Joint North Sea Wave Project (JONSWAP); Ergänzungsheft 8–12; Deutsches Hydrographisches Institut: Hamburg, Germany, 1973. [Google Scholar]
- Wheeler, J.D. Method for calculating forces produced by irregular waves. J. Pet. Technol. 1970, 22, 359–367. [Google Scholar] [CrossRef]
- Lewandowski, E.M. Comparison of Some Analysis Methods for Ship Roll Decay Data. In Proceedings of the 12th International Ship Stability Workshop (STAB2011), Washington, DC, USA, 12–15 June 2011. [Google Scholar]
- Wandji, C. Review of Probabilistic Methods for Dynamic Stability of Ships in Rough Seas. In Proceedings of the 17th International Ship Stability Workshop (STAB2019), Helsinki, Finland, 10–12 June 2019; pp. 47–56. [Google Scholar]
- van Walree, F.; de Jong, P. Deterministic validation of a time domain panel code for parametric roll. In Proceedings of the 12th International Ship Stability Workshop (STAB2011), Washington, DC, USA, 12–15 June 2011. [Google Scholar]
- Paulling, J.R. The transverse stability of a ship in a longitudinal seaway. J. Ship Res. 1961, 4, 37–49. [Google Scholar]
- Butikov, E.I. Analytical expressions for stability regions in the Ince–Strutt diagram of Mathieu equation. Am. J. Phys. 2018, 86, 257–267. [Google Scholar] [CrossRef]
- Francescutto, A.; Bulian, G. Nonlinear and stochastic aspects of parametric rolling modelling. In Proceedings of the 6th International Ship Stability Workshop, Glenn Cove, NY, USA, 13–16 October 2002. [Google Scholar]
- Hashimoto, H.; Umeda, N.; Matsuda, A.; Nakamura, S. Experimental and Numerical Studies on Parametric Roll of a Post-Panamax Container Ship in Irregular Waves. In Proceedings of the 9th International Conference on Stability of Ships and Ocean Vehicles, Rio de Janeiro, Brazil, 25–29 September 2006. [Google Scholar]
- Dallinga, R.P. Predicting Parametric Roll, SWZ|Maritime, 135, July–August 2014; pp. 44–47. Available online: https://www.swzmaritime.nl/pdf-archive/2014-edition-8/ (accessed on 15 May 2020).
- Bu, S.-X.; Gu, M.; Lu, J.; Abdel-Maksoud, M. Effects of radiation and diffraction forces on the prediction of parametric roll. Ocean Eng. 2019, 175, 262–272. [Google Scholar] [CrossRef]
- Greco, M.; Lugni, C.; Colicchio, G.; Faltinsen, O.M. Numerical Study of Bilge-Keel Effect on Parametric Roll and Water on Deck for an FPSO. In Proceedings of the 34th International Conference on Ocean, Offshore and Arctic Eng. (OMAE2015), St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | LC-1 | LC-12 | Units |
|---|---|---|---|---|
| Length perp. | Lpp | 230.00 | m | |
| Beam | B | 32.20 | m | |
| Draft | T | 10.80 | m | |
| Depth | D | 19.00 | m | |
| Displacement | Δ | 53,389 | ton | |
| Vertical CoG | KG | 13.67 | 14.34 | m |
| Metacentric height | GM | 1.22 | 0.60 | m |
| Roll nat. period | Tφ | 23.6 | 34.1 | s |
| Roll gyradius | kXX | 11.90 | m | |
| Pitch gyradius | kYY | 57.50 | m | |
| Yaw gyradius | kZZ | 57.50 | m | |
| Characteristic | Sim-1 | Sim-2 | Sim-3 | Sim-4 |
|---|---|---|---|---|
| Wave model | L | L | L | L |
| DoF | 6 | 6 | 6 | 6 |
| Speed control | S | C | C | C |
| Hydrodynamics | R | ZG | S | ZG |
| Rel. motion | I | I | I | I |
| Pressure for z > 0 | H | H | HW | HW |
| Pressure integration | M | M | M | M |
| Course control | SD | F | R | R |
| Vs [kn] | Loading Condition | Tφ [s] | BCR [kNms] | p [-] | q [1/°] | r [1/°2] |
|---|---|---|---|---|---|---|
| 0 | LC-1 | 23.6 | 4.77 × 106 | 0 | 2.35 × 10-2 | 0 |
| 5.00e−02 | 0 | 8.5 × 10-4 | ||||
| 8 | 23.0 | 4.69 × 106 | 1.07e−01 | 2.30 × 10-2 | 0 | |
| 2.40e−01 | 0 | 7.0 x10-4 | ||||
| 8 | LC-12 | 32.7 | 3.33 × 106 | 9.40e−02 | 2.50 × 10-2 | 0 |
| Wave Direction | Av. ship Speed Vs-av [kn] | Sign. Wave Height Hs [m] | Peak Period Tp [s] | Peakedness Parameter γ [-] | Test Duration [h] |
|---|---|---|---|---|---|
| Head | 7.6 | 7.0 | 13.5 | 3.3 | 3 |
| 7.9 | 8.0 | ||||
| Following | 7.9 | 4.0 | 13.5 | 3.3 | 3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kapsenberg, G.; Wandji, C.; Duz, B.; Kim, S. A Comparison of Numerical Simulations and Model Experiments on Parametric Roll in Irregular Seas. J. Mar. Sci. Eng. 2020, 8, 474. https://doi.org/10.3390/jmse8070474
Kapsenberg G, Wandji C, Duz B, Kim S. A Comparison of Numerical Simulations and Model Experiments on Parametric Roll in Irregular Seas. Journal of Marine Science and Engineering. 2020; 8(7):474. https://doi.org/10.3390/jmse8070474
Chicago/Turabian StyleKapsenberg, Geert, Clève Wandji, Bulent Duz, and Sungeun (Peter) Kim. 2020. "A Comparison of Numerical Simulations and Model Experiments on Parametric Roll in Irregular Seas" Journal of Marine Science and Engineering 8, no. 7: 474. https://doi.org/10.3390/jmse8070474
APA StyleKapsenberg, G., Wandji, C., Duz, B., & Kim, S. (2020). A Comparison of Numerical Simulations and Model Experiments on Parametric Roll in Irregular Seas. Journal of Marine Science and Engineering, 8(7), 474. https://doi.org/10.3390/jmse8070474