1. Introduction
Vortex shedding from the trailing edge of a foil is a significant phenomenon in various engineering disciplines. Flows separated by a foil will recombine at the upper and lower surfaces of the trailing edge of the foil, forming periodic eddies in the wake field and inducing mechanical vibrations. This phenomenon was first observed in aircraft airfoils; because airfoils typically exhibit very high wake-vortex shedding frequencies, they are at a considerable risk of fatigue damage. The damage caused by vortex shedding is particularly severe if the vortex-shedding frequency approaches a natural frequency of the airfoil. A similar phenomenon is known to occur in propellers and is particularly concerning in marine propellers because an intense degree of vortex shedding leads to periodic fatigue stresses in the blades of the propeller that shorten their service life. Because vortex shedding can lead to a series of failures in engineered structures, it is important to study the causes of this phenomenon and elucidate the behavior of vortex shedding in a variety of operating conditions.
The mechanical vibrations induced by vortex shedding have been widely investigated. Vincenc Strouhal discovered that the audible tone of a wire “singing” in the wind is proportional to the quotient of the wind speed by the wire thickness (i.e., tone = proportionality coefficient × wind speed/wire thickness) and that each cross-section has a certain proportionality coefficient in the noncritical range of Reynolds numbers. This is known as the Strouhal number, and it is an important parameter to evaluate the vortex-shedding frequency. Theodore von Kármán linked this phenomenon to the stable and staggered vortices that form behind a cylindrical object, which was later termed the Kármán vortex street effect. In addition, he proposed the theory of vortex street stability [
1]. Perry et al. [
2] obtained images of the vortex-shedding process from the wake field of a circular cylinder by tracing the motion of aluminum particles in long-exposure photography. Griffin [
3] and Williamson et al. [
4] investigated the alternating shedding of vortices from a cylinder and discovered that this process is caused by interactions between vortices on the upper and lower surfaces of the cylinder; once a vortex on a given surface reaches a sufficient strength, it draws the opposing shear layer across the near wake, causing the vortices to shed alternatingly from the upper and lower surfaces. Gerrard [
5] observed vortex shedding from circular and bluff cylinders with different cross-sectional shapes and deduced that the vortex generation is affected by the end conditions of the cylinders. Gerich [
6] proved that the shape of the ends of a cylinder affect the mechanism of vortex shedding from these ends. In addition, Achenbach and Heinecke [
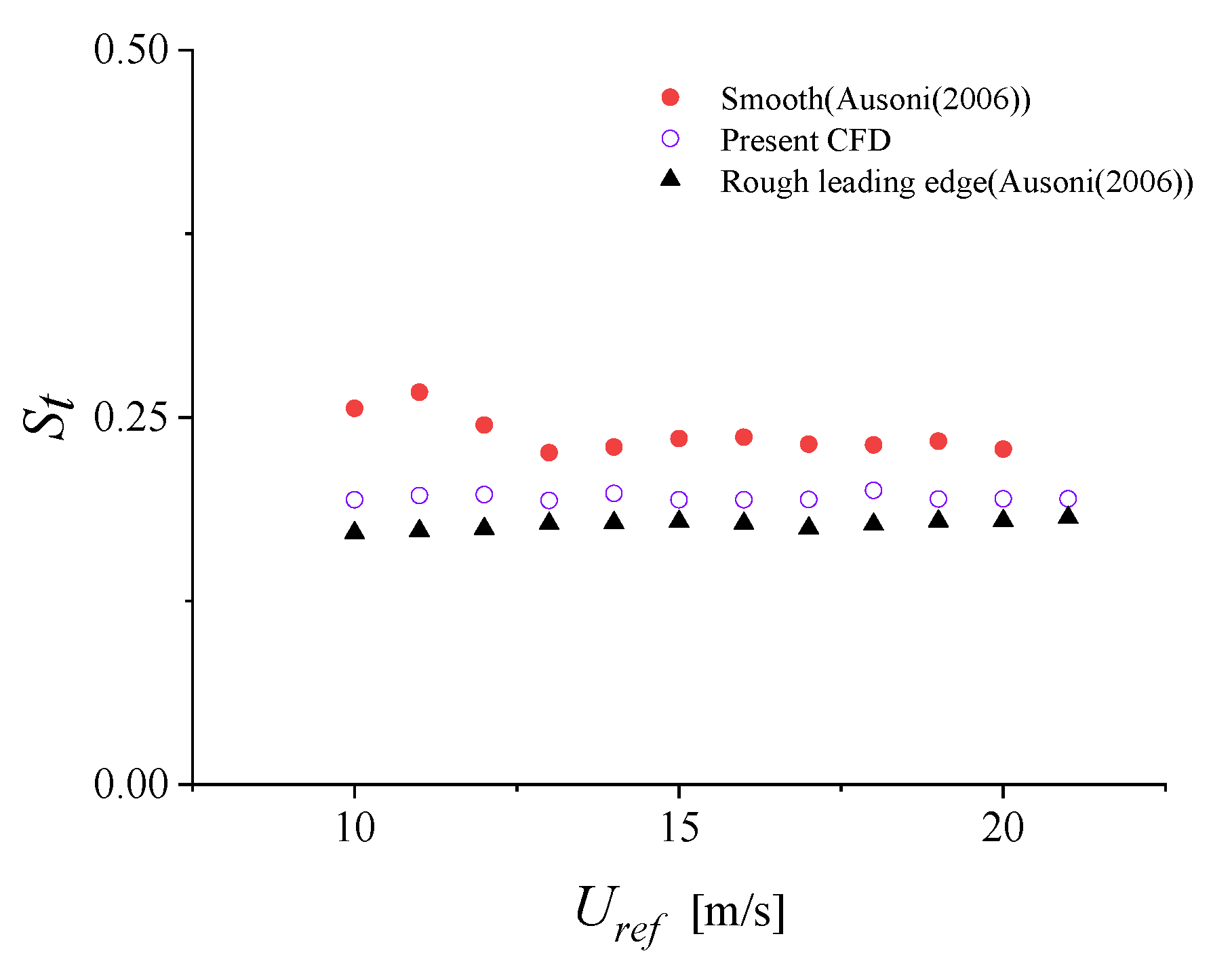
7] conducted wind tunnel experiments and discovered that the wake of a cylinder became more regular as the roughness of the cylinder’s surface increased. Furthermore, the Strouhal number of a vortex shedding from a rough cylinder was estimated to be much smaller than that of a vortex shedding from a smooth cylinder.
Through the various studies conducted on the vortex-shedding phenomenon, it was observed that intense resonance can occur if the vortex-shedding frequency of the Kármán vortex street is equal to one of the eigenfrequencies of a given object. This discovery shifted the focus of the study of vortex shedding from simple cylindrical objects to objects of practical interest, such as hydrofoils. A series of analytical studies were also conducted on the basis of experimental data. Ausoni [
8] experimentally investigated the effects of cavitation on vortex shedding from symmetrical hydrofoils with a blunted trailing edge and analyzed the wake structure, vortex-shedding frequency, and hydrofoil resonance frequency associated with each stage of cavitation development. He discovered that the vortex-shedding frequency can “lock-in” to an eigenfrequency of a hydrofoil. Lotfy and Rockwell [
9] investigated vortex shedding in the near-wake of an oscillating trailing edge. Prasad and Williamson [
10] analyzed the vortex dynamics of hydrofoil wakes based on the instability of the shear layer separating the water from a bluff body. Dwayne et al. [
11] investigated vortex shedding at a high Reynolds number from hydrofoils with different terminating bevel angles on their trailing edges and found that the vortex-shedding intensity is higher in blunter and thicker trailing edges. Zobeiri et al. [
12] conducted an experimental study on the effects of the trailing-edge shape on vortex shedding and flow-induced vibrations and found that oblique trailing edges significantly reduce flow-induced vibrations. This was attributed to the collisions between upper and lower vortices in an oblique trailing edge, which leads to vorticity redistribution.
Numerical modeling has been widely employed for the study of vortex shedding. Many previous numerical studies focused on vortex shedding from circular objects. For example, Williamson [
13] numerically simulated the wake flows of a cylindrical object. William [
14] used complex analysis to formulate an analytical expression for the shedding frequency of Kármán vortex streets from the trailing edge of an airfoil. However, the shedding frequencies predicted by this expression were typically much lower than the experimentally observed ones. Huerre and Monkewitz [
15] and Oertel et al. [
16] analyzed the effects of flow instabilities on vortex-shedding behaviors of blunt hydrofoils analytically. Potential flow theory is often used to study the wake-vortex shedding of swinging or flapping objects. However, current studies on vortex shedding focus on the formation of Kármán vortex streets behind static objects, which is essentially a boundary layer dissociation problem; these problems are very difficult to model with the potential flow theory. Another significant feature of this problem is that the trailing edge of the hydrofoil is often very thin, which leads to very large local Reynolds numbers. This results in unique physical phenomena that can only be modeled by precise numerical simulations. Lee et al. [
17] studied the vortex shedding of hydrofoils, numerically considering a variety of trailing-edge shapes, and compared their findings with the experimental findings of Ausoni and Zobeiri. In addition, they investigated the effects of periodically varying free-stream flows on vortex shedding.
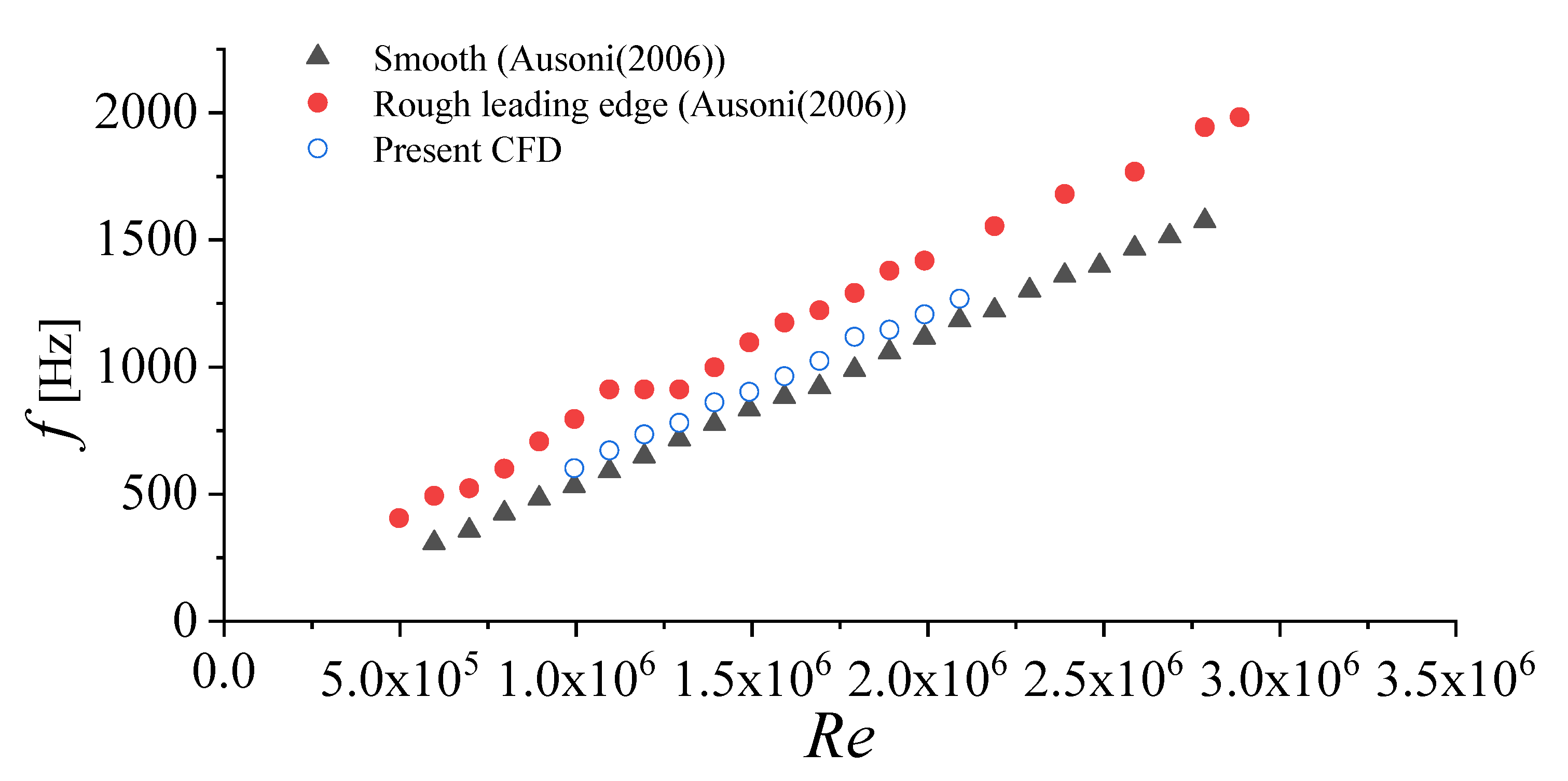
Many studies using numerical simulations of or experimental tests on vortex shedding have been conducted, and the subsequent hydrodynamic force fluctuations of hydrofoils have been analyzed. The main purpose of the abovementioned studies was to evaluate the amplitude and frequency of force fluctuation, which have significant effects on marine structures. Ausoni [
8] experimentally studied the vortex-shedding frequency of hydrofoils with perpendicularly truncated trailing edges and found that the increase in frequency was almost linear with the inflow velocity. Dwayne et al. [
11] studied the vortex-shedding frequency of hydrofoils with obliquely truncated trailing edges and found that thicker hydrofoils or blunter trailing edges correspond to higher vortex-shedding frequencies. Another experimental study was conducted by Zobeiri [
12], wherein it was found that the obliquely truncated trailing edges can significantly reduce the vortex-shedding strength, and subsequently, the amplitude of the force fluctuation. Analytical studies of vortex shedding were performed by Blake [
14] and Oertel [
16] on hydrofoils and cylinders, respectively. However, the force of analytical results is much less than that by experiments. The vortex shedding of hydrofoils is strongly related to the formation of viscous boundary layers. From this perspective, methods based on the potential flow assumptions can hardly predict vortex shedding precisely. Instead, computational fluid dynamics (CFD) simulations can effectively represent vortex shedding. Although Reynolds-averaged Navier–Stokes simulations [
8] or large Eddy simulations (LES) [
17] cannot fully simulate turbulent flows, their numerical results generally agree well with experimental results and can reflect the physical characteristics of vortex shedding.
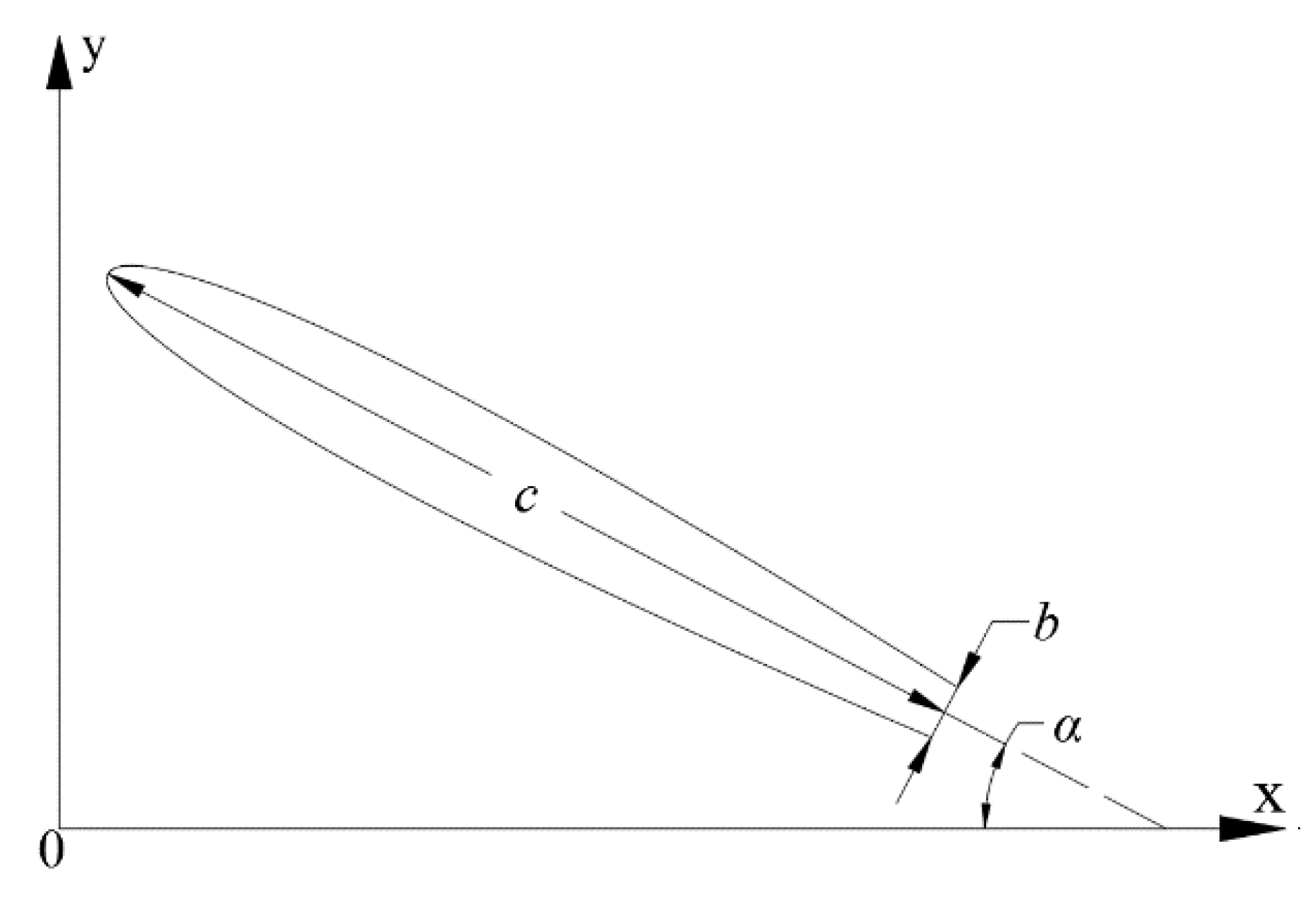
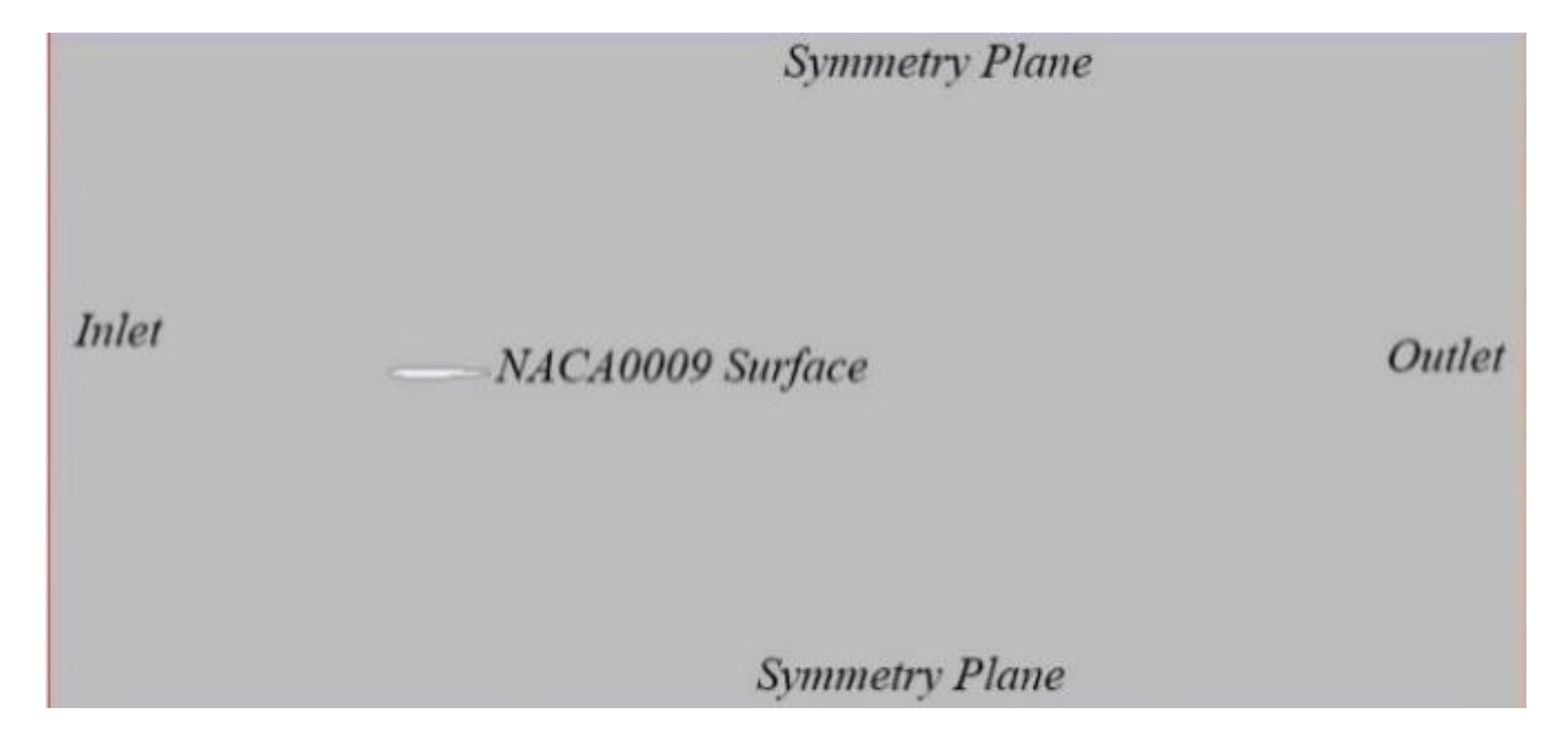
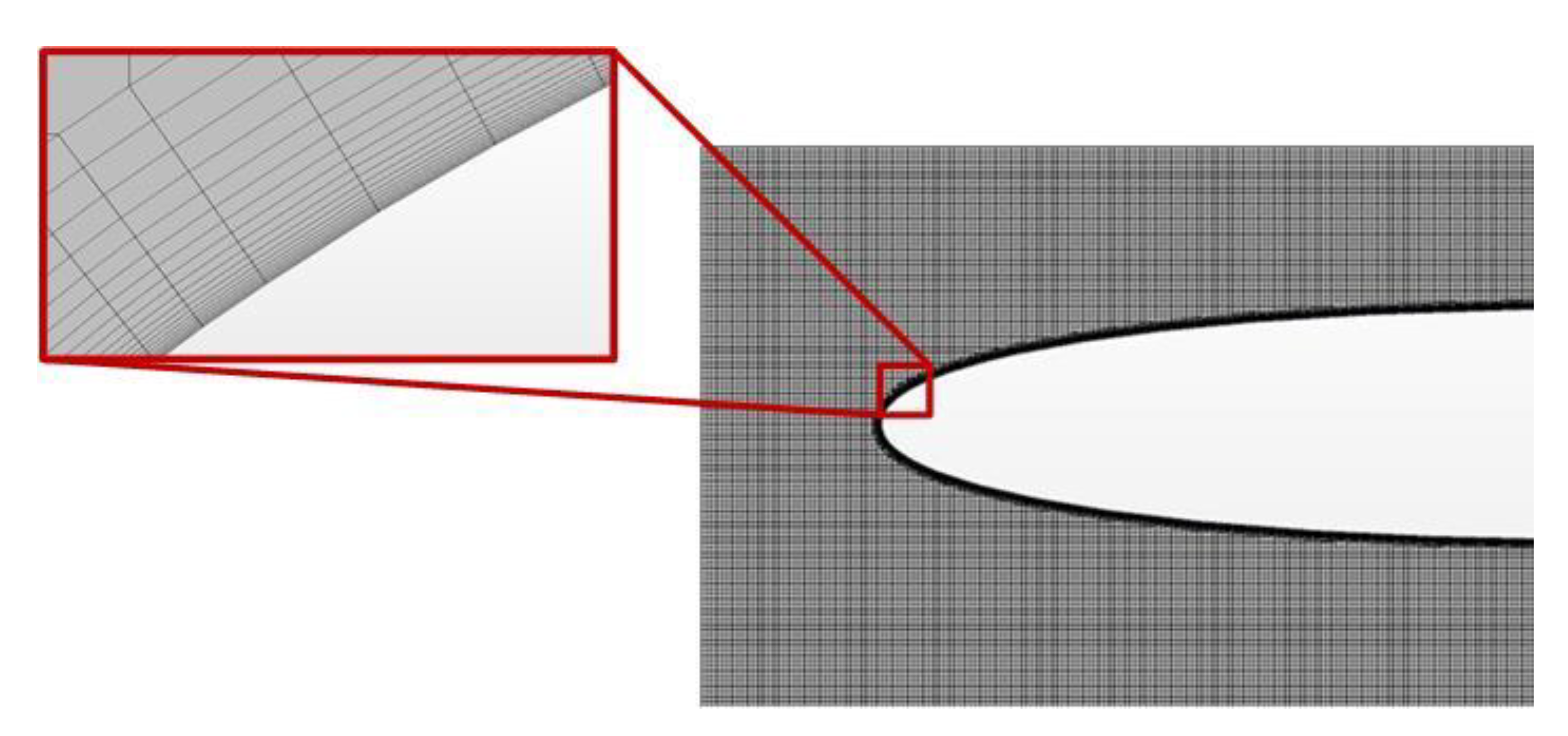
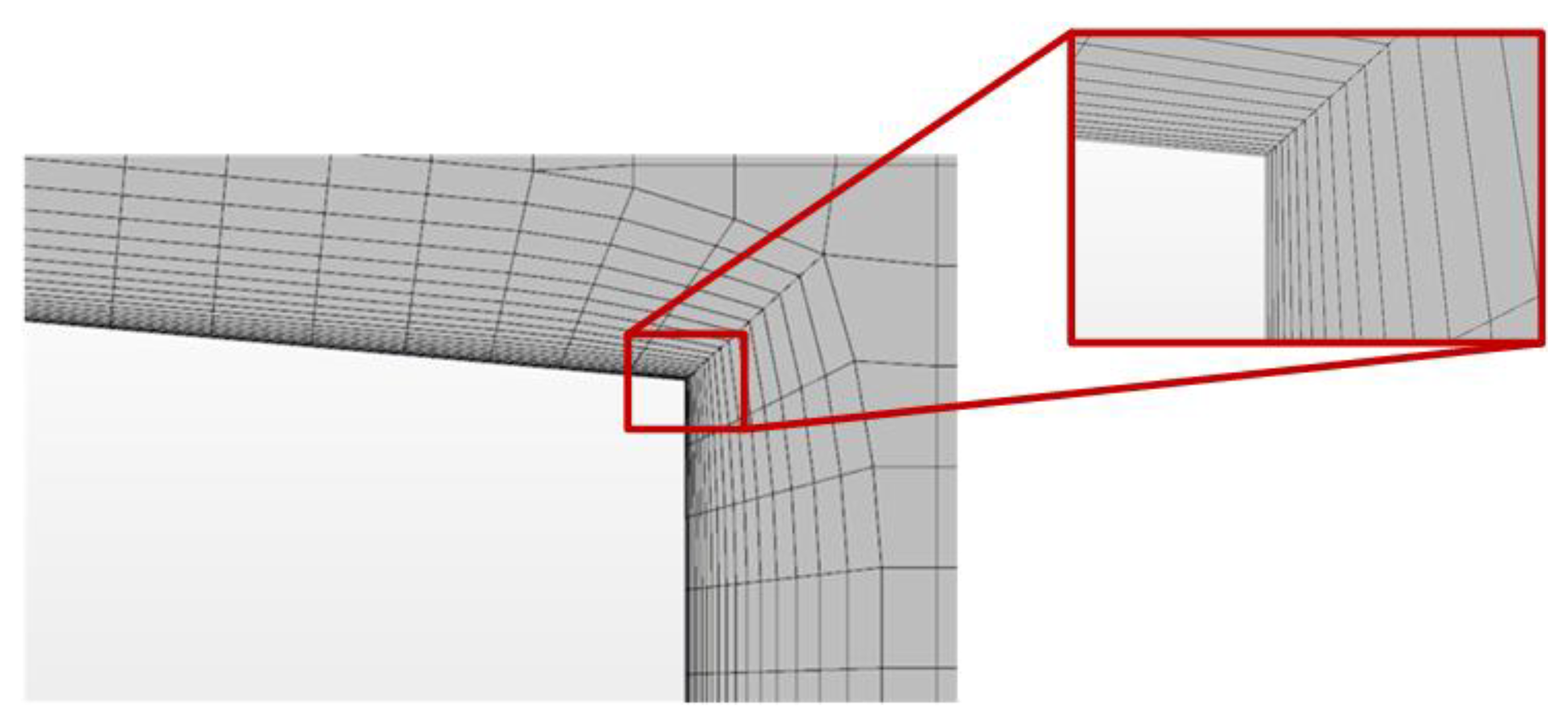
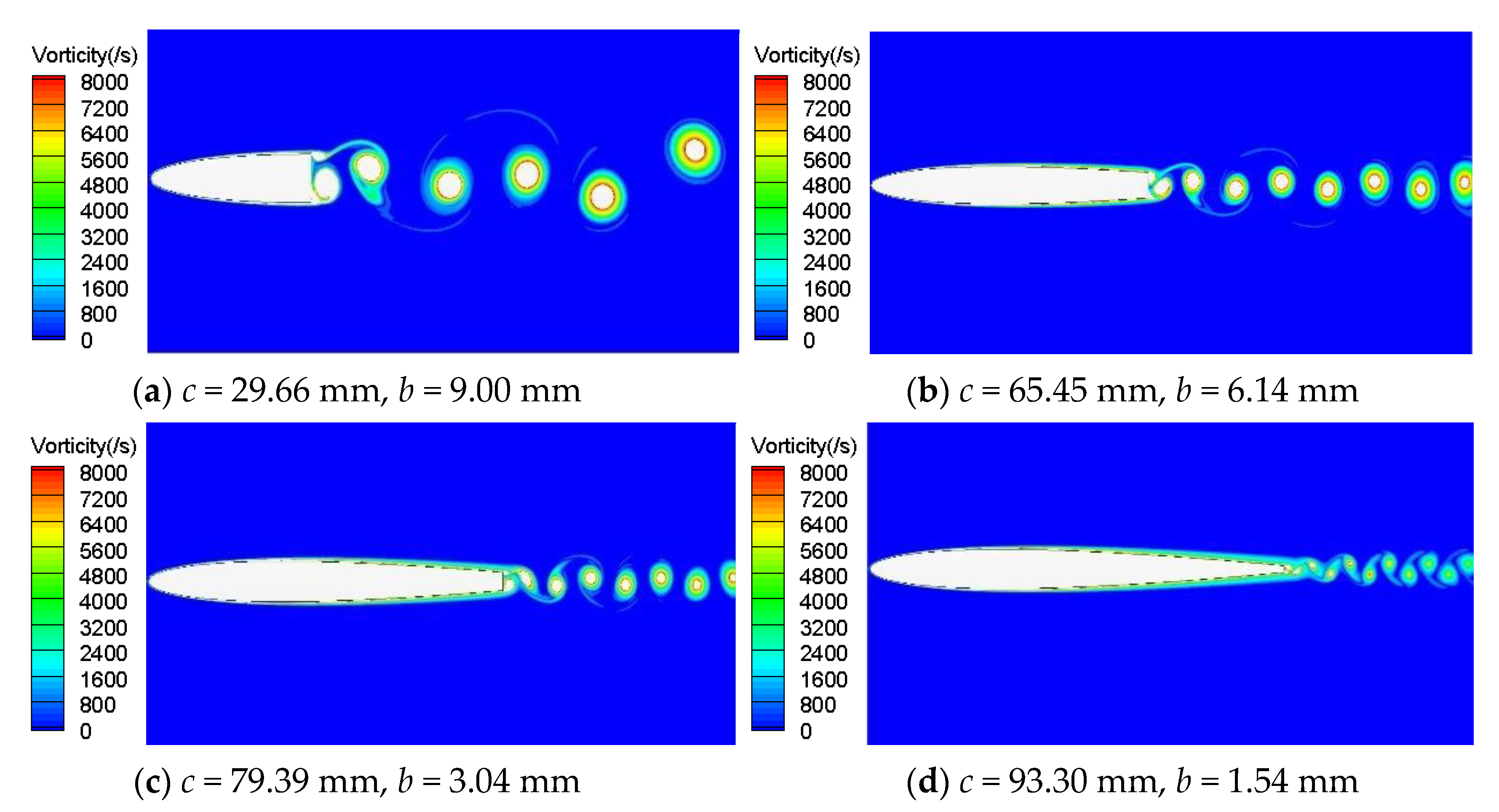
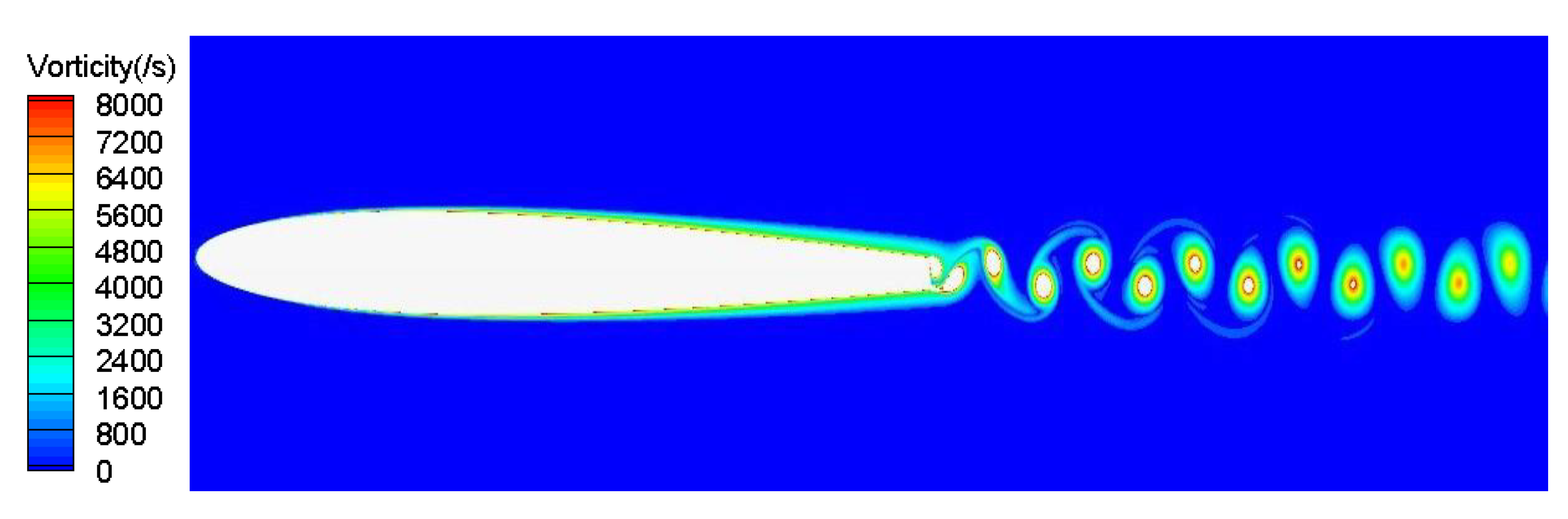
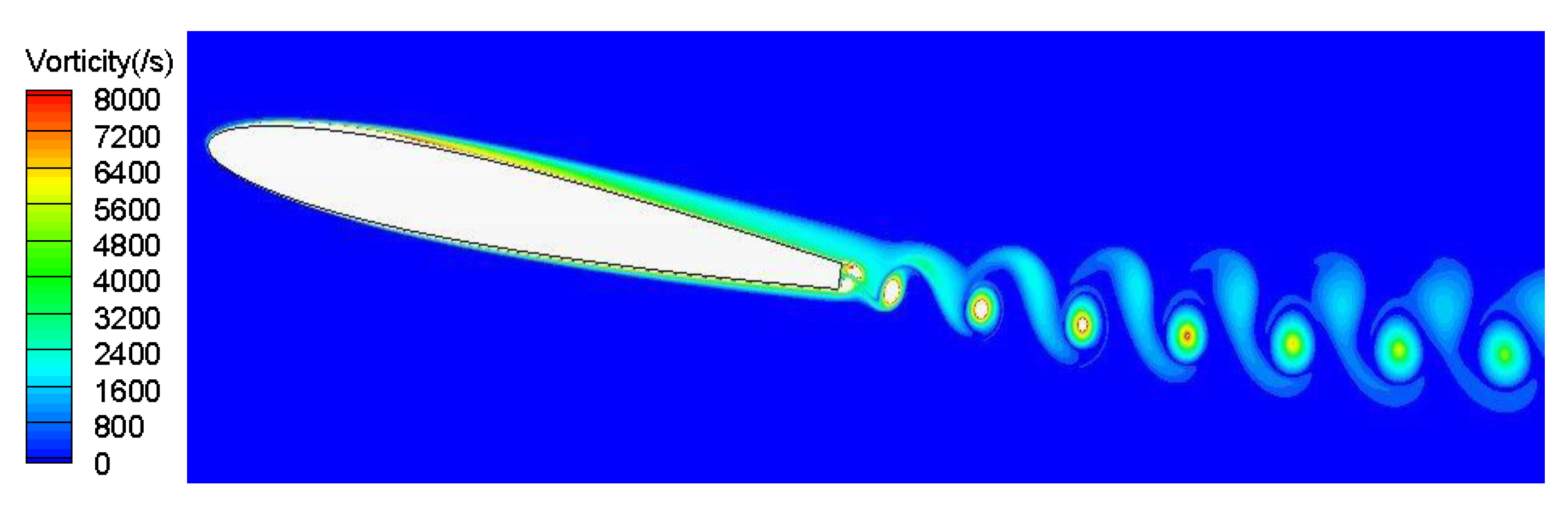
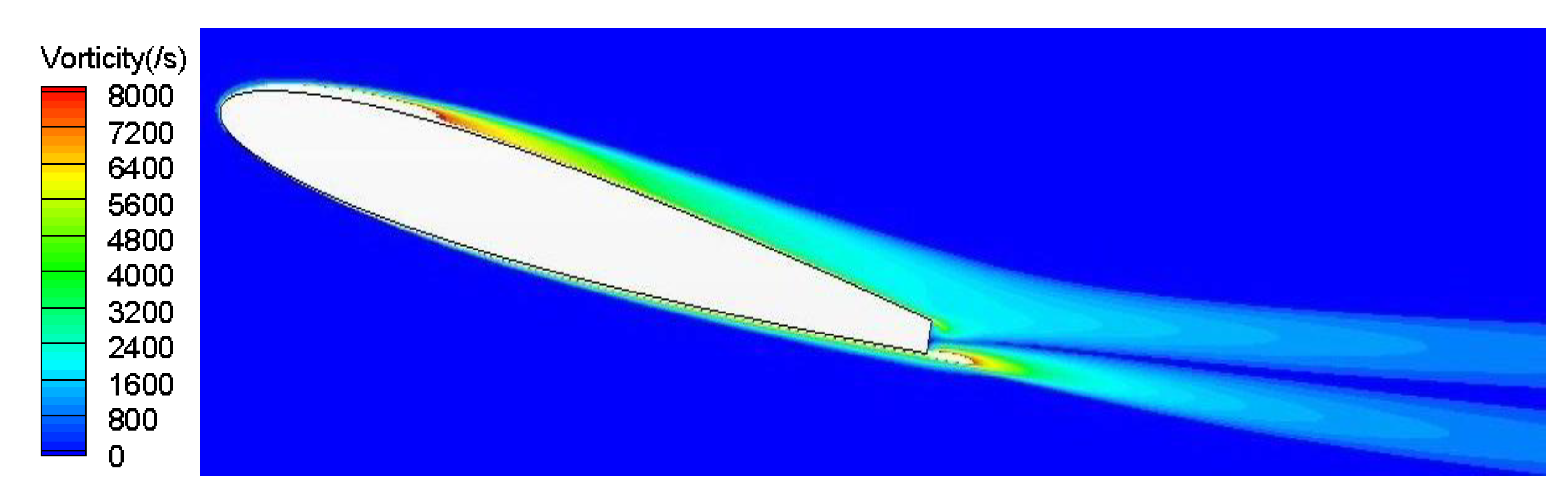
The above discussion shows that vortex shedding from static hydrofoils is a problem of practical significance and academic interest as it plays a significant role in flow-induced vibrations and noise and fatigue damage. However, research on this problem is still insufficient, and further elucidations are required. In this study, we conducted CFD simulations of two-dimensional flows around a NACA0009 hydrofoil in a variety of operating conditions to observe vortex shedding at the trailing edge of a hydrofoil. We investigated the lift curve and trailing-edge vortex shedding of the hydrofoil with different inflow velocities, angles of attack, truncation points, and maximum hydrofoil thicknesses to reveal their correlations with the vortex-shedding frequency. The findings of this study will provide general rules for the investigation of flow-induced vibrations in objects such as hydrofoils and marine propellers.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}