Modeling Tsunami-Induced Erosion of Bridge-Abutment Backfill


Abstract
1. Introduction
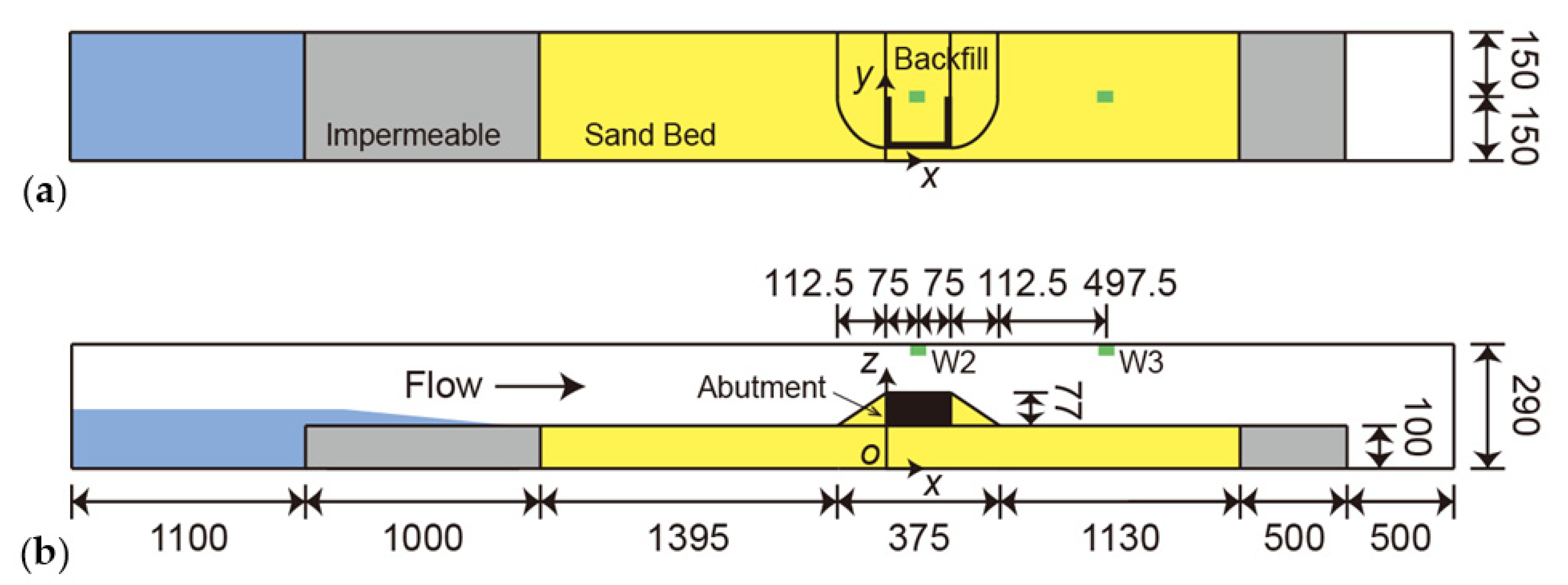
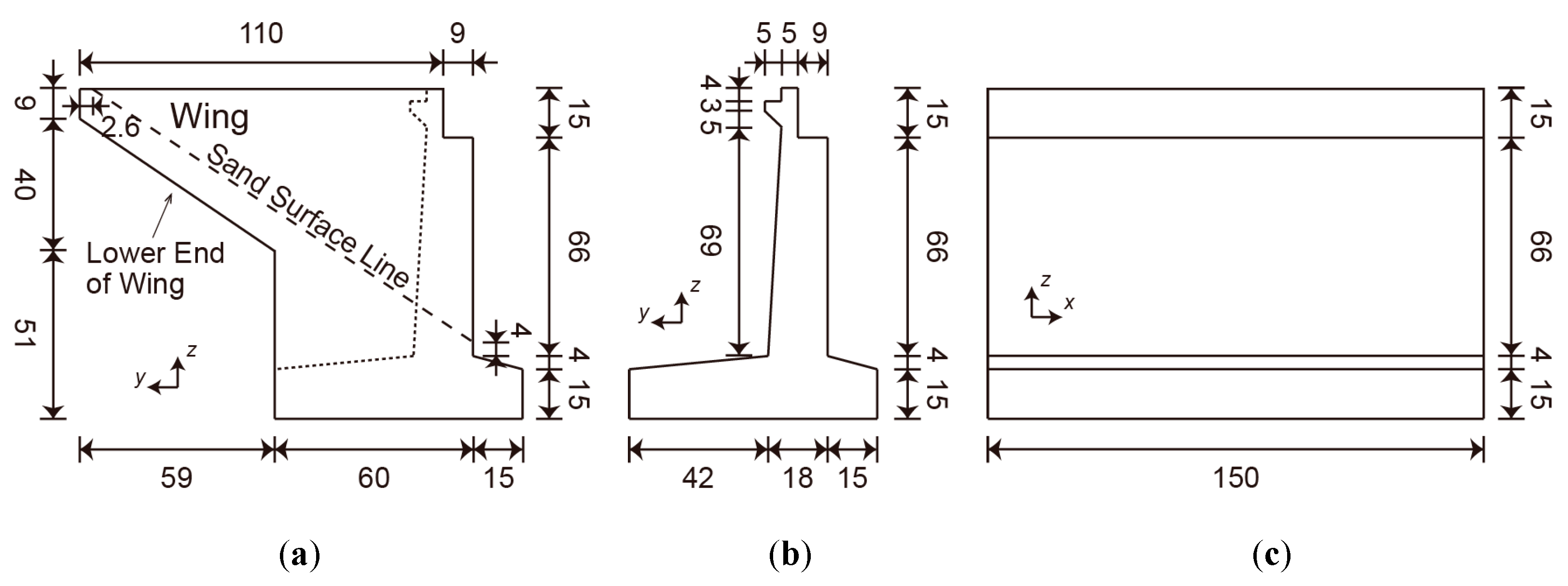
2. Experimental Setup and Conditions
3. Experimental Results and Discussion
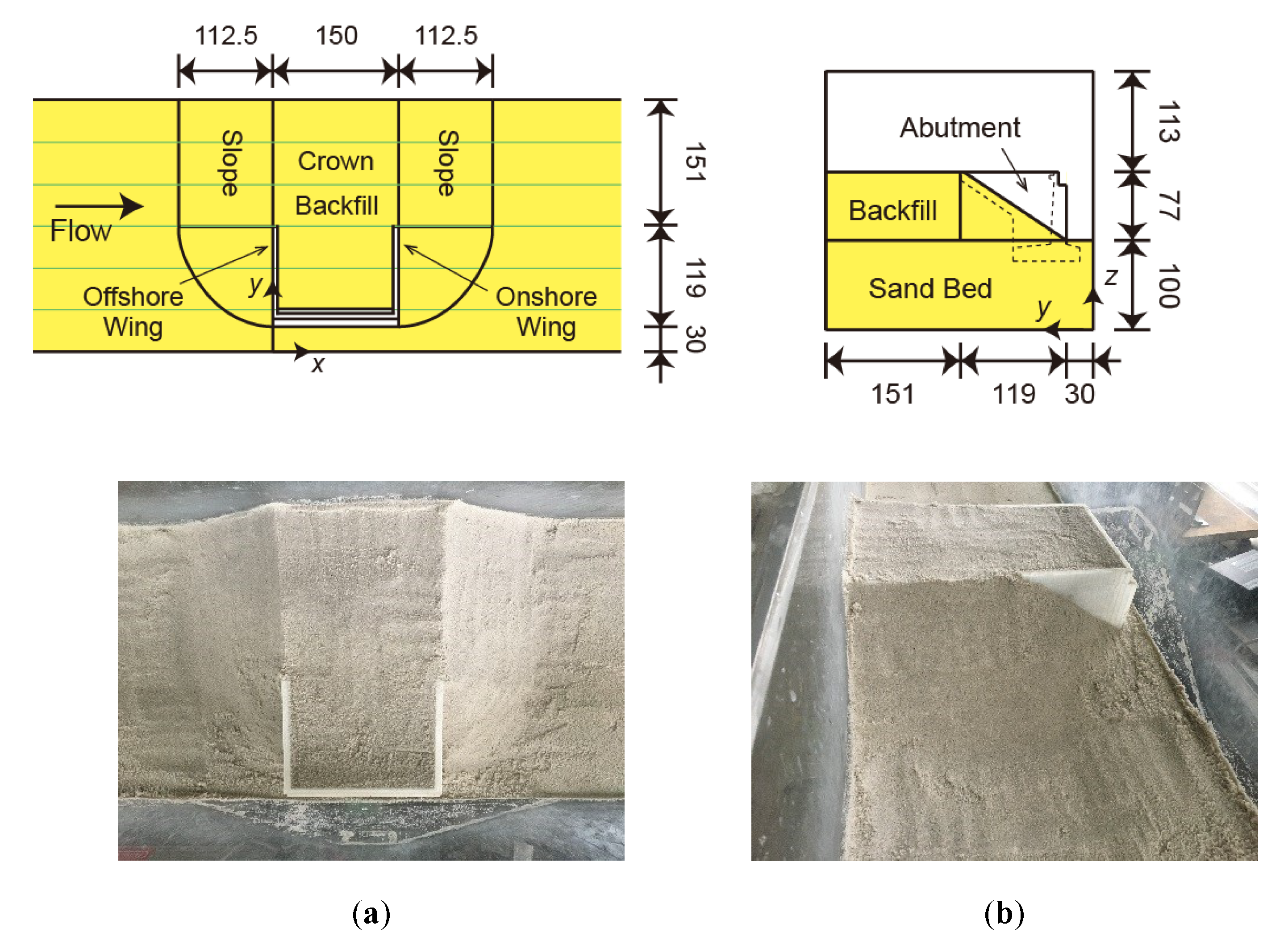
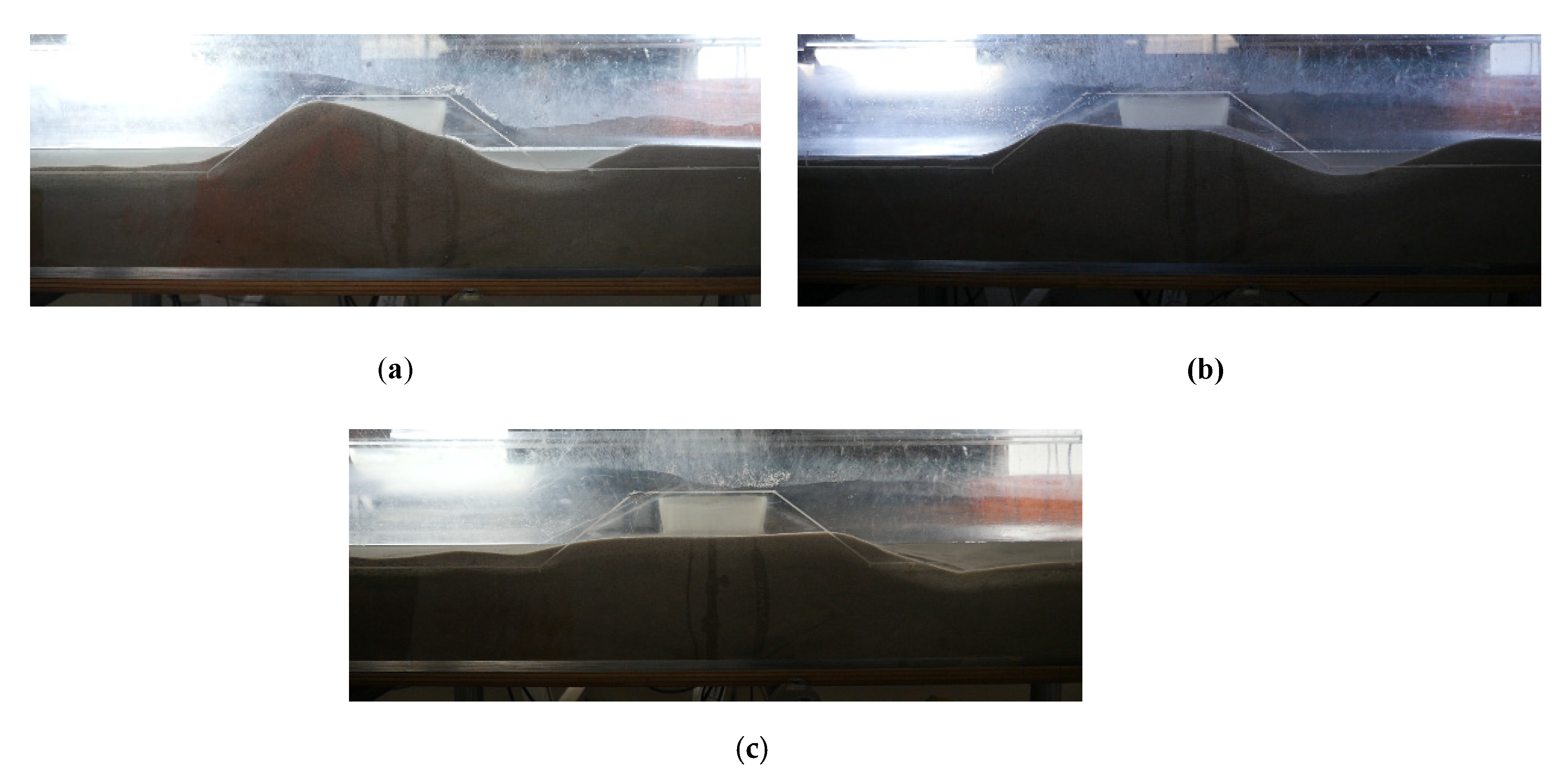
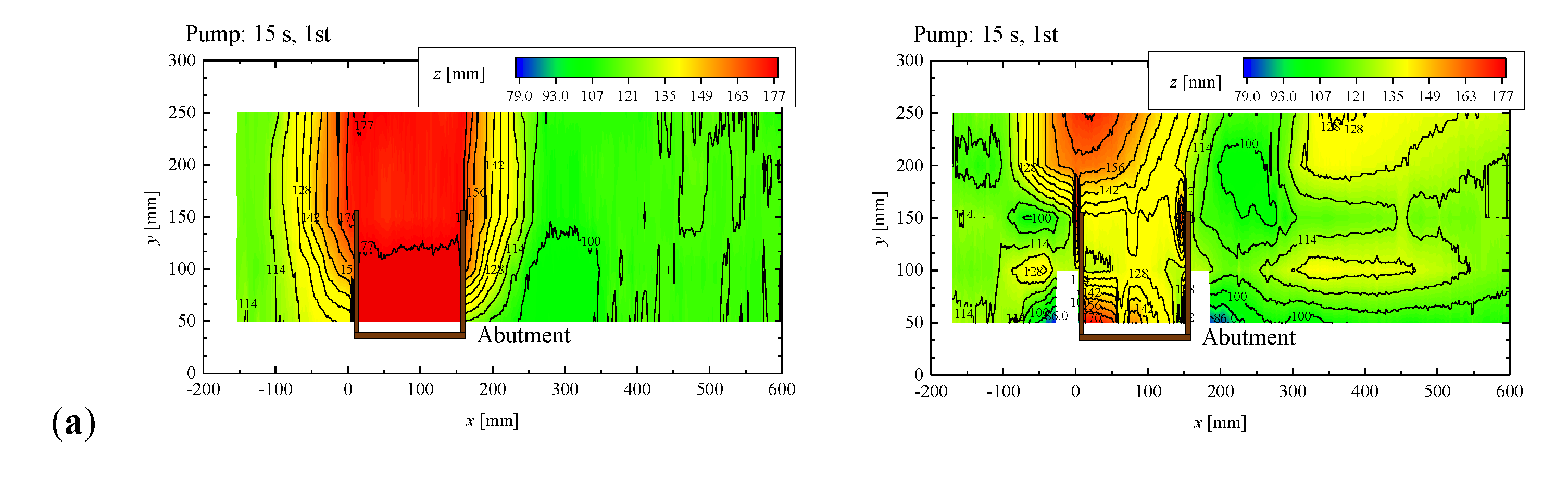
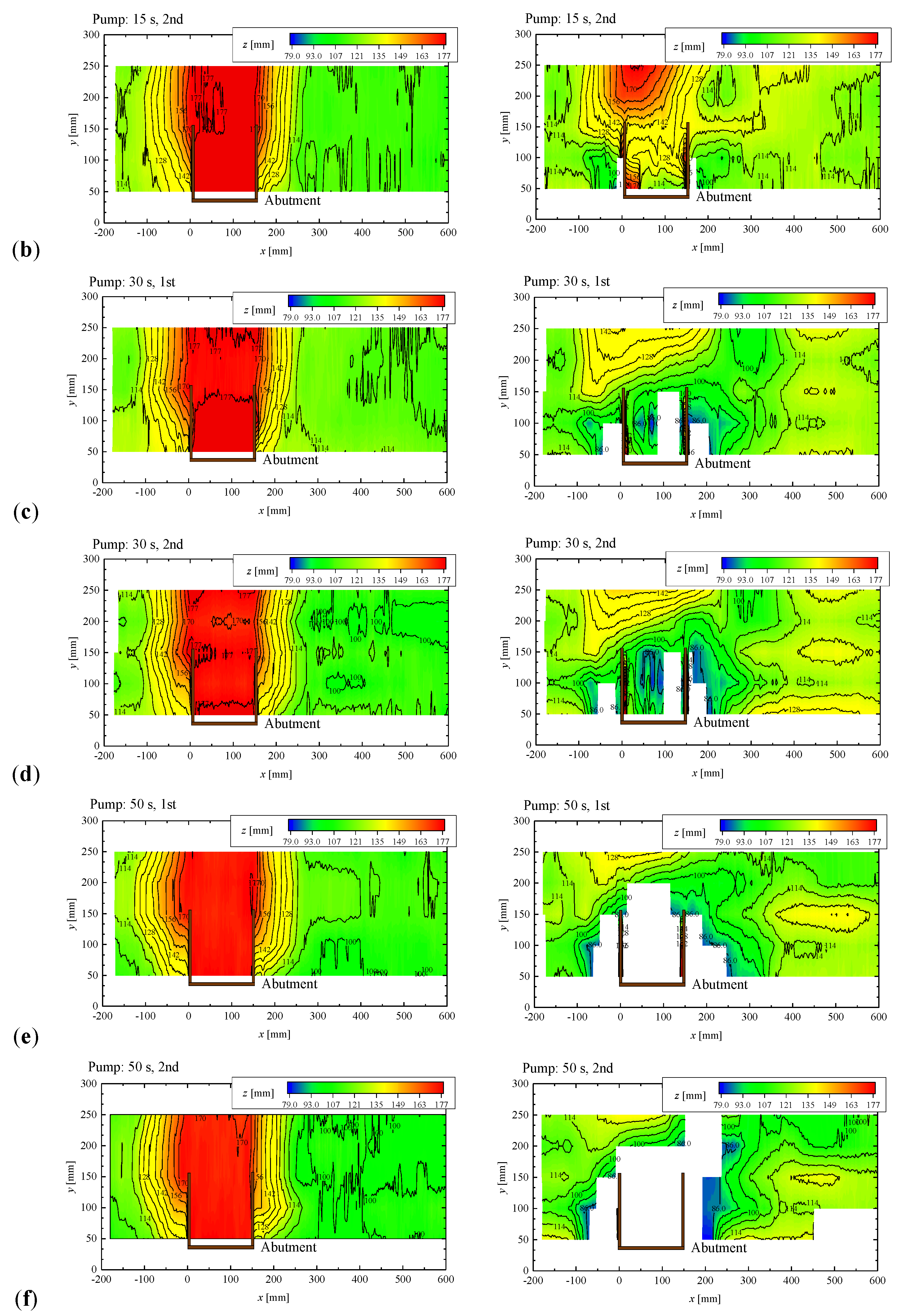
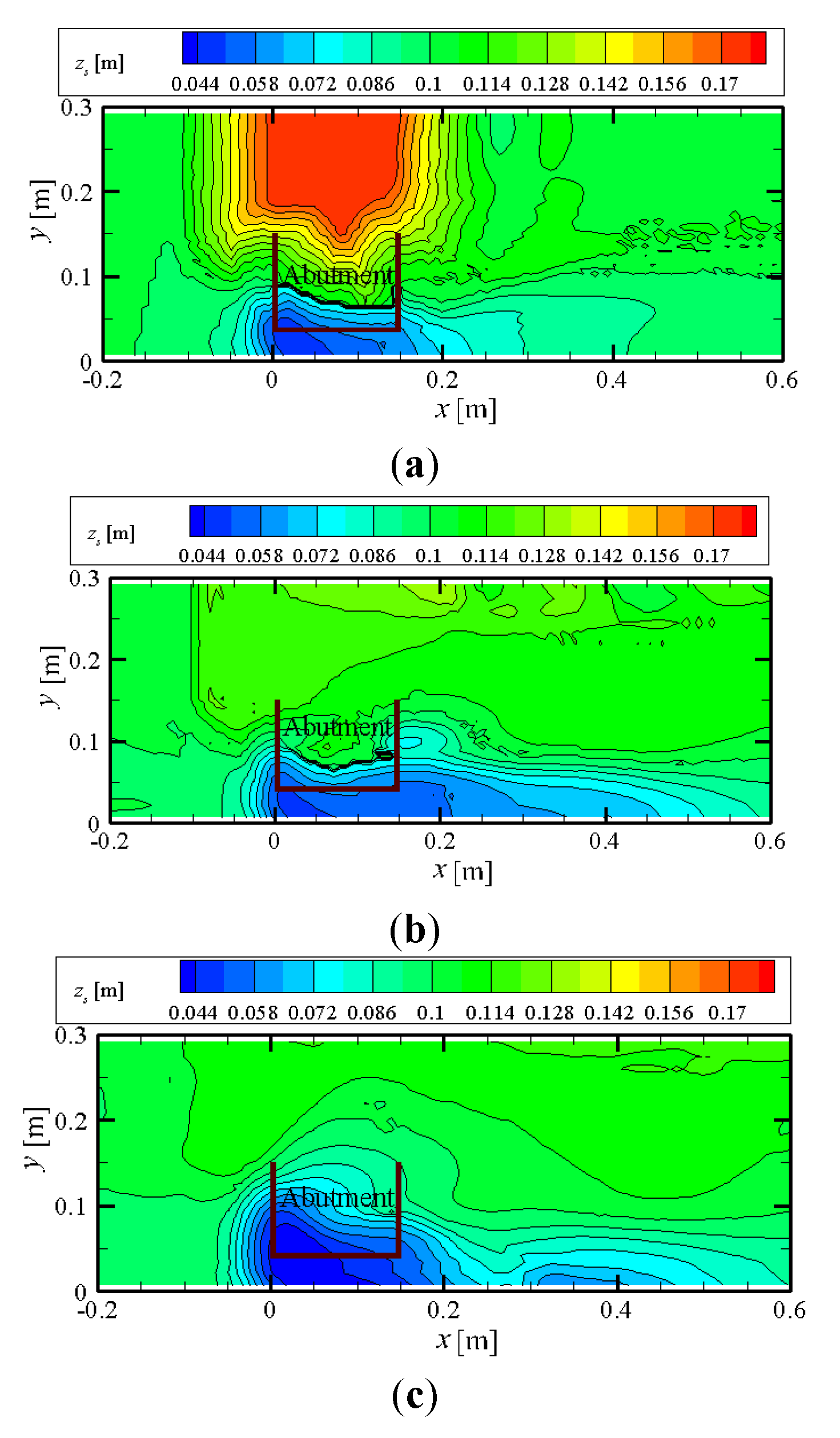
3.1. Surface Profile of Backfill after the Tsunami
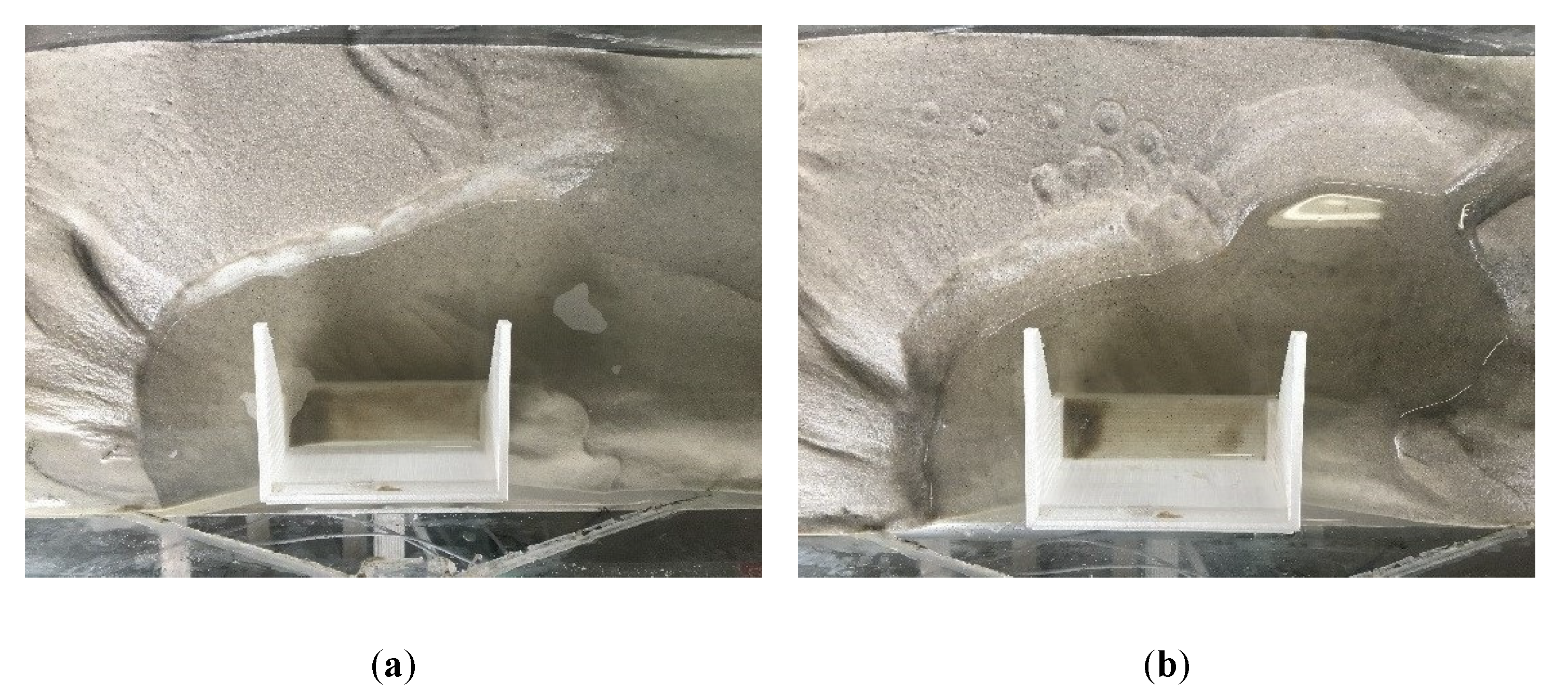
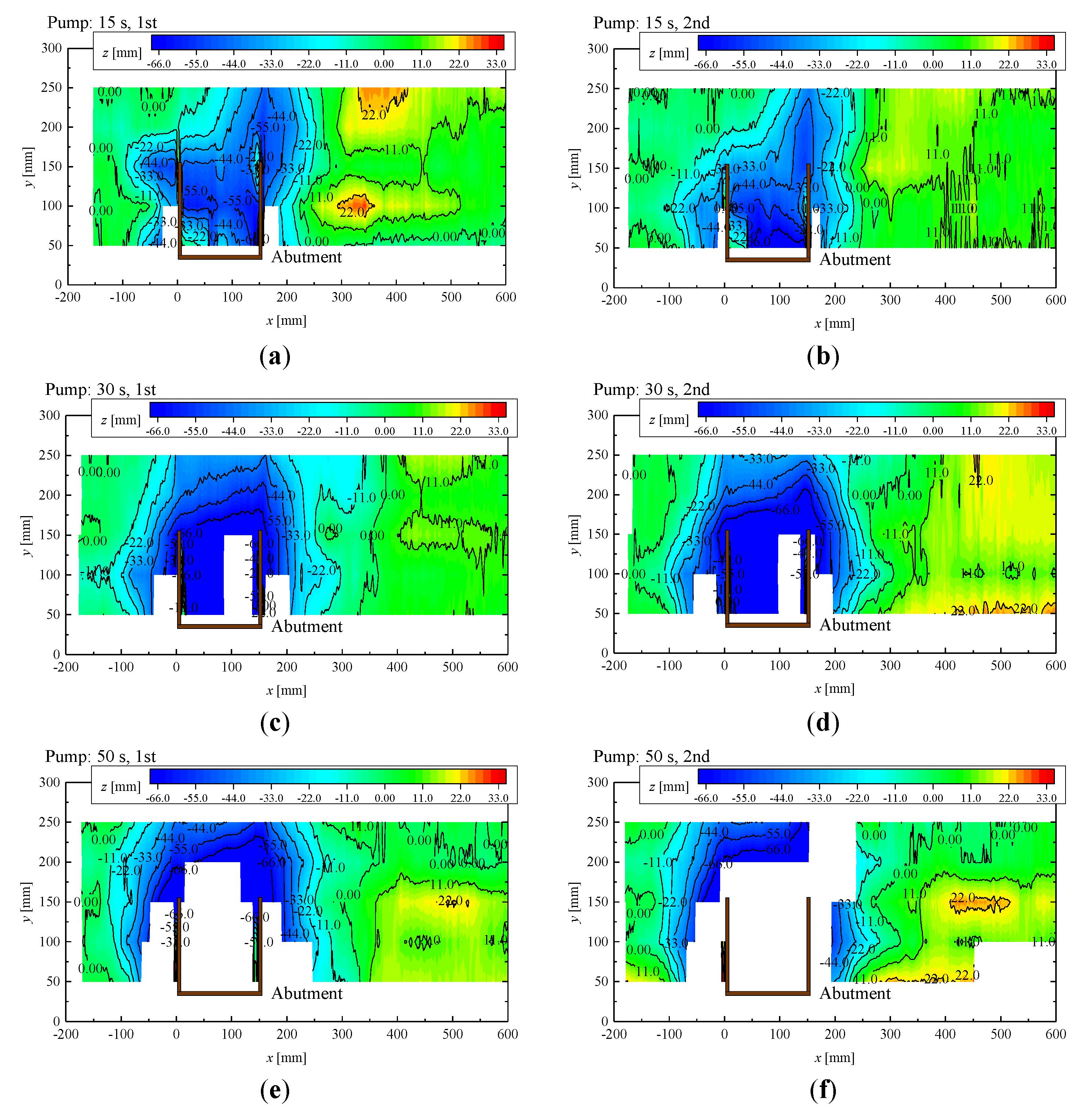
3.2. Surface Profile Change in Backfill Due to a Tsunami
4. Numerical Conditions
5. Numerical Results and Discussion
5.1. Predictive Capability of FS3M
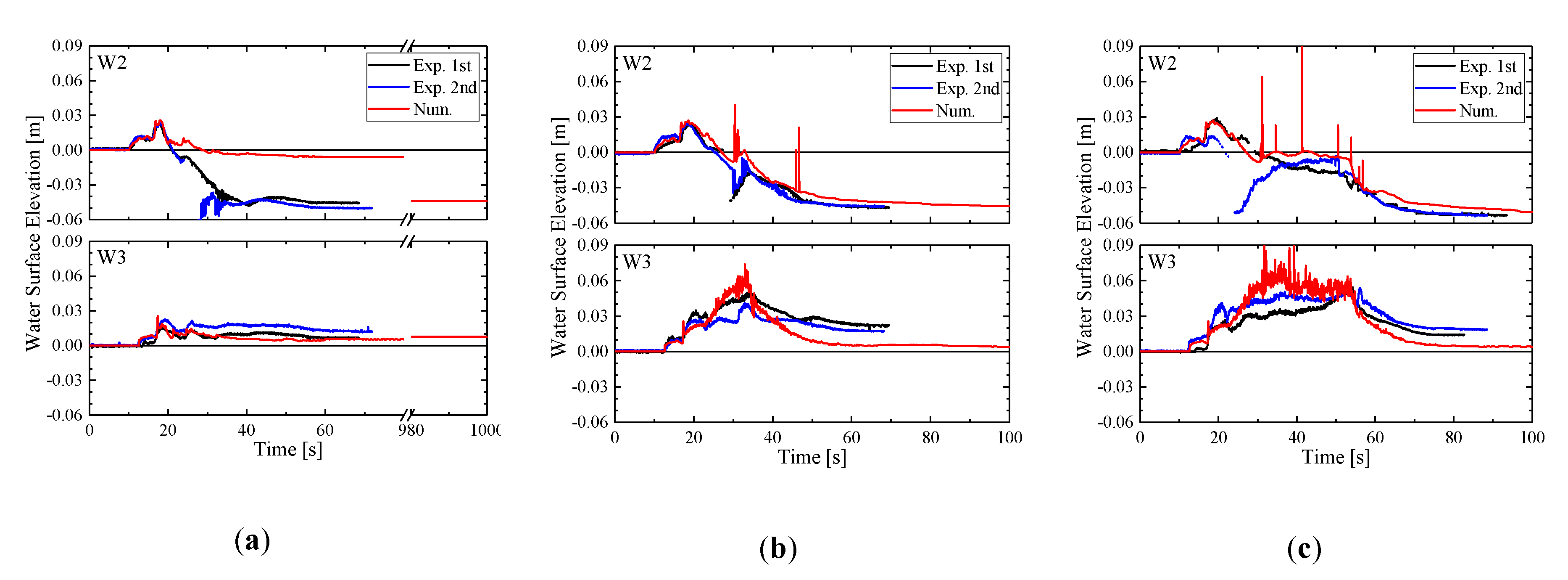
5.1.1. Comparison in Cases with Only Backfill
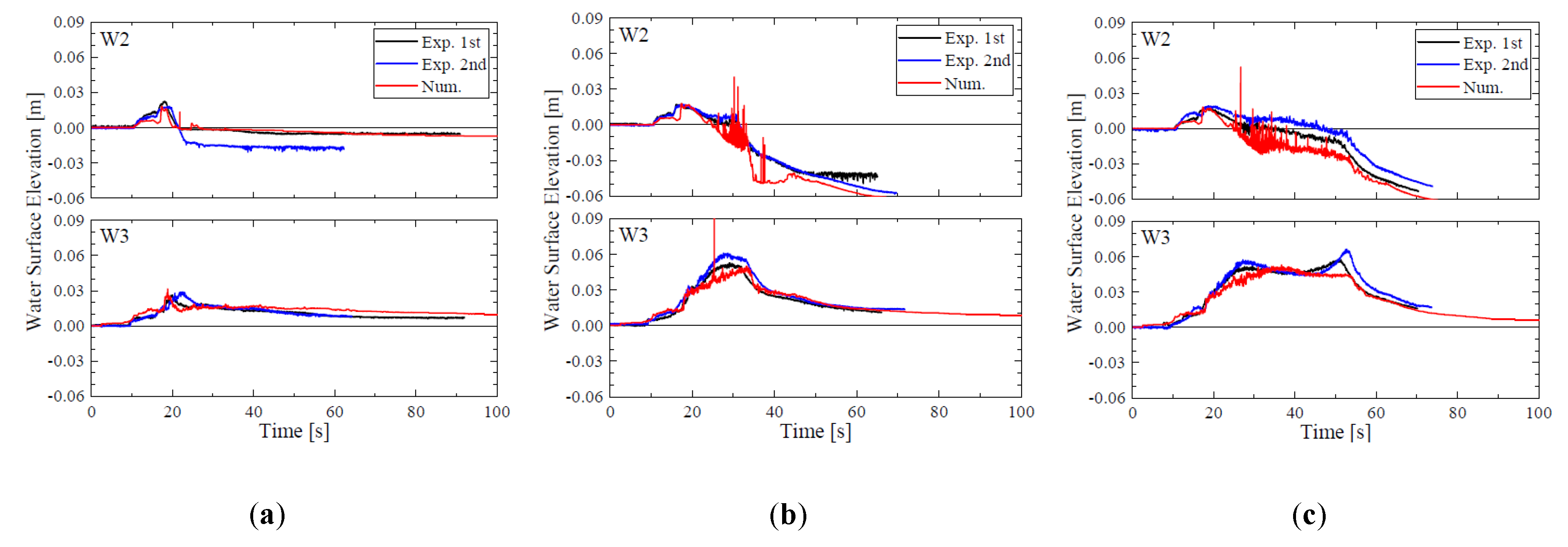
5.1.2. Comparison in Cases with Abutment and Backfill
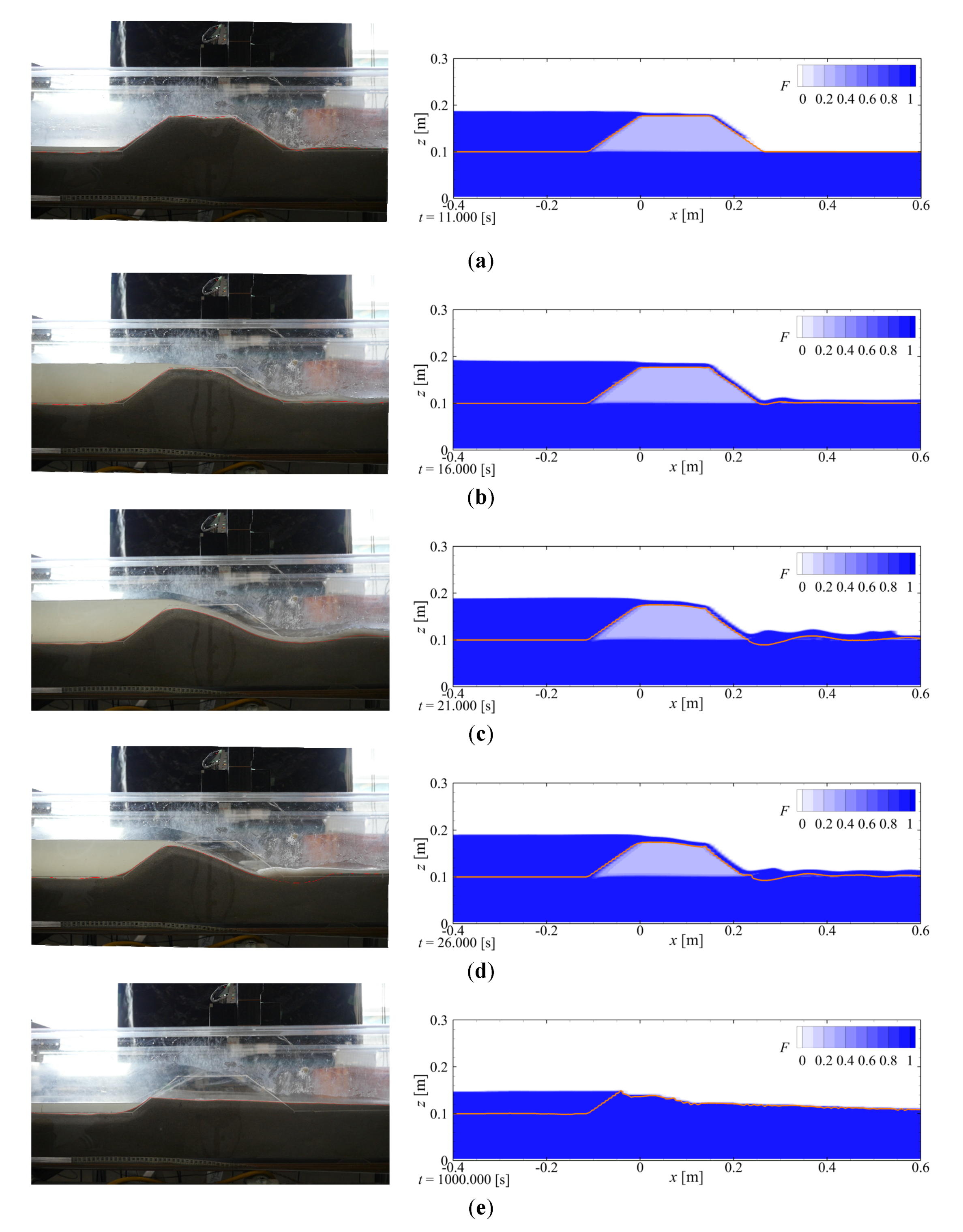
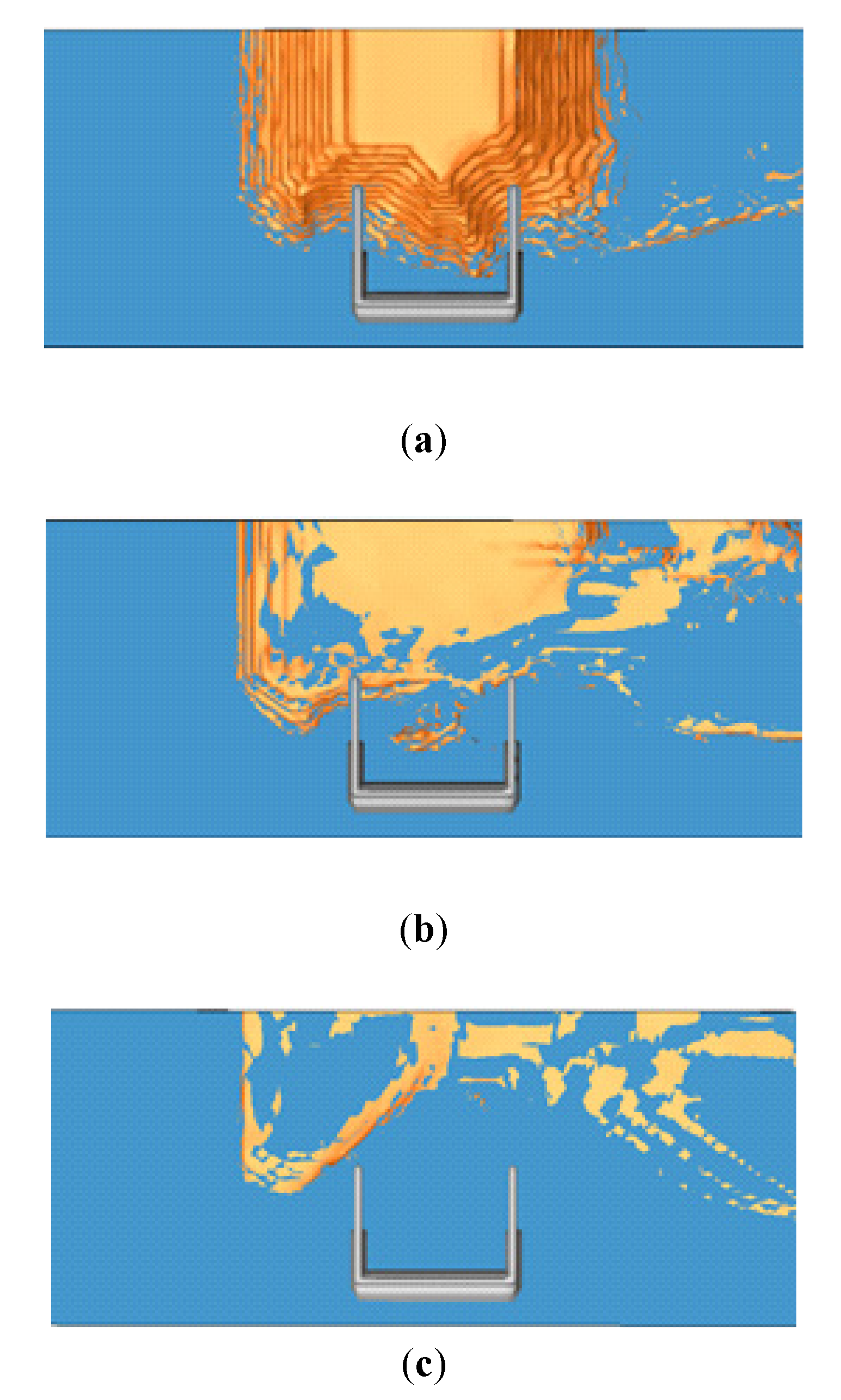
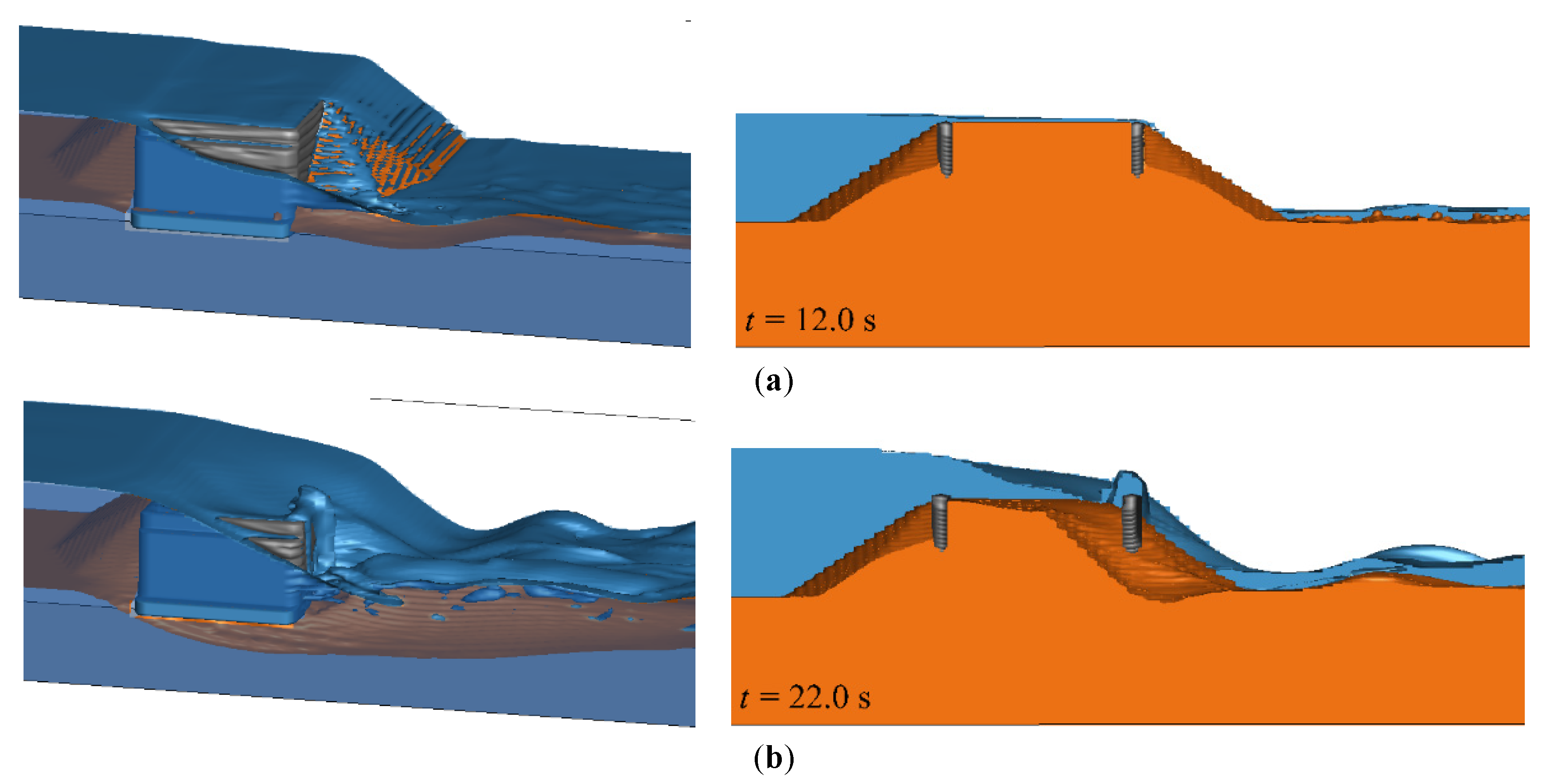
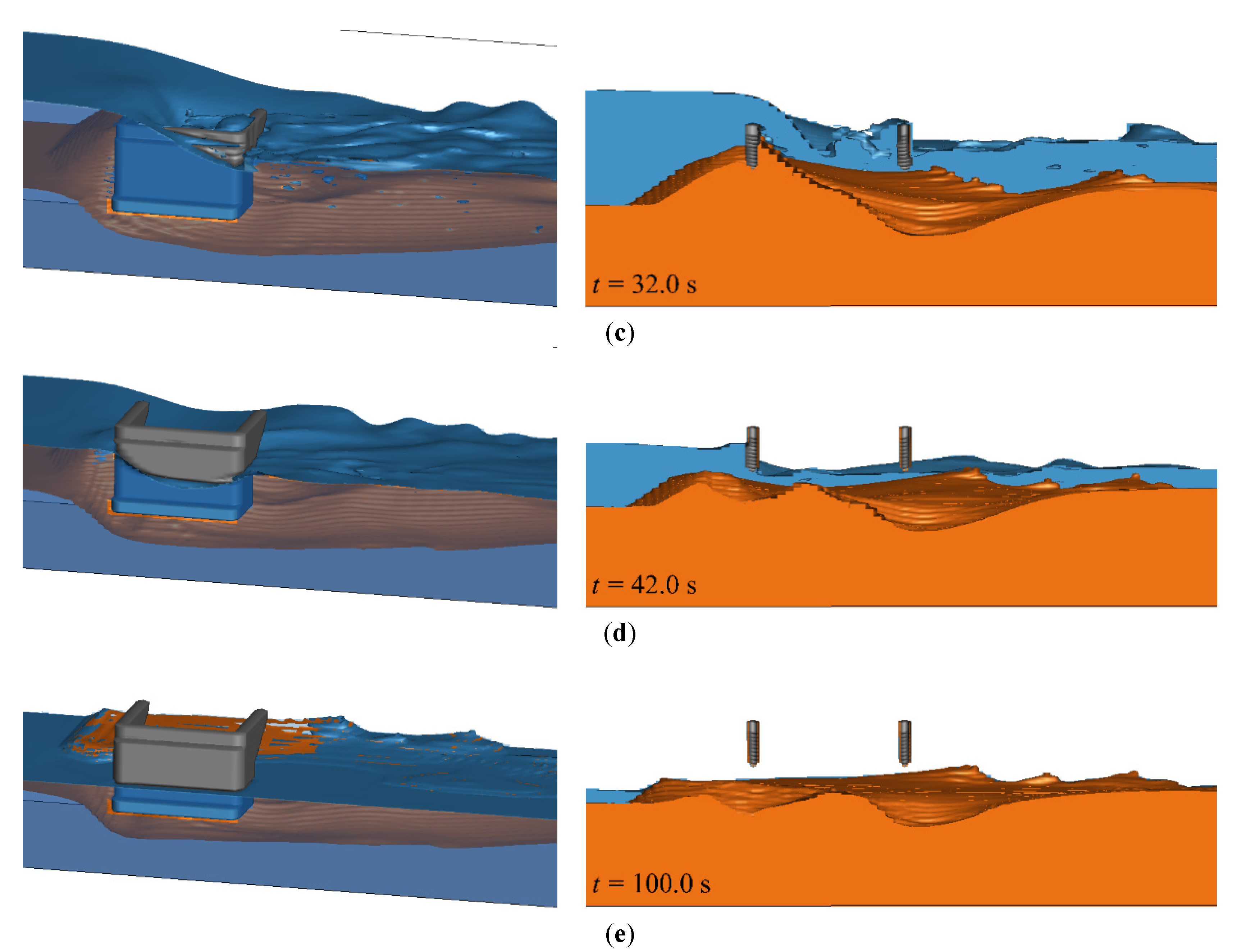
5.2. Erosion Process of Backfill
6. Conclusions
- The tsunami caused erosion and local scouring of the backfill around the abutment. The scale of the erosion and local scouring increased with the duration of the tsunami. By contrast, the backfill on the far side of the abutment remained in place. This suggests that the proximity of the abutment accelerates the erosion of the backfill.
- From a comparison between the experimental data and numerical results, the capability of the FS3M to predict water-surface fluctuations and the surface-profile change in the backfill was demonstrated.
- The erosion process of the backfill around the abutment was revealed by the numerical analysis. The tsunami eroded the oval conical part of the backfill on the landward side of the onshore wing. When the erosion reached the lower end of the wing, the backfill began to flow out from underneath the wing. Increasing the depth of soil cover on the onshore wing might, therefore be effective in slowing down the erosion.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bricker, J.D.; Fransis, M.; Nakayama, A. Scour depths near coastal structures due to the 2011 Tohoku Tsunami. J. Hydraul. Res. 2012, 50, 637–641. [Google Scholar] [CrossRef]
- Rajaratnam, N. Erosion by plane turbulent jets. J. Hydraul. Res. 1981, 19, 339–358. [Google Scholar] [CrossRef]
- Bressan, L.; Guerrero, M.; Antonini, A.; Petruzzelli, V.; Archetti, R.; Lamberti, A.; Tinti, S. A laboratory experiment on the incipient motion of boulders by high-energy coastal flows. Earth Surf. Process. Landf. 2018, 43, 2935–2947. [Google Scholar] [CrossRef]
- JSCE (Japan Society of Civil Engineers). Part II: Final Report of Tsunami Damage Analysis WG. In Final Report of Subcommittee on Damage Analysis of Bridges Due to Great East. Japan Earthquake; Earthquake Engineering Committee, JSCE: Tokyo, Japan, 2015. (In Japanese) [Google Scholar]
- Azadbakht, M.; Yim, S.C. Simulation and estimation of tsunami loads on bridge superstructure. J. Waterw. Portcoastalocean Eng. 2015, 141, 04014031. [Google Scholar] [CrossRef]
- Wei, Z.; Dalrymple, R.A.; Hérault, A.; Bilotta, G.; Rustico, E.; Yeh, H. SPH modeling of dynamic impact of tsunami bore on bridge piers. Coast. Eng. 2015, 104, 26–42. [Google Scholar] [CrossRef]
- Nakamura, T.; Sawa, Y.; Mizutani, N. Study on the evaluation of temporal change in horizontal and vertical tsunami forces acting on a bridge superstructure. Coast. Eng. J. 2016, 58, 1640020-1. [Google Scholar] [CrossRef]
- Inoue, T.; Miyamoto, K.; Yoshizaki, F.; Nagase, H.; Hirooka, A. Centrifuge model experiments on tsunami-induced damage mechanism of backfill of bridge abutment with different shapes. In Proceedings of the 49th Annual Meeting of Japan National Conference on Geotechnical Engineering, Kitakyushu, Japan, 15–17 July 2014; pp. 1897–1899. (In Japanese). [Google Scholar]
- Yoshizaki, F.; Fujioka, D.; Hirooka, A.; Nagase, H. Centrifuge model experiments on the effect of pseudo-tsunami flow on damage situation of abutment backfill. In Proceedings of the 50th Annual Meeting of Japan National Conference on Geotechnical Engineering, Sapporo, Japan, 1–4 September 2015; pp. 1177–1178. (In Japanese). [Google Scholar]
- Nakamura, T.; Mizutani, N. Development of fluid-sediment-seabed interaction model and its application. In Proceedings of the 34th International Conference on Coastal Engineering, Seoul, Korea, 15–20 September 2014; p. 8. [Google Scholar]
- Nakamura, T.; Yim, S.C.; Mizutani, N. Three-dimensional fluid-structure-sediment interaction modeling with application to local scouring around a movable cylinder. J. Offshore Mech. Arct. Eng. 2013, 135. [Google Scholar] [CrossRef]
- Sugii, T.; Yamada, K.; Okumura, K. Discussion on hydraulic conductivity of unsaturated sand at high saturation. In Proceedings of the Annual Meeting of Chubu Branch, Shimizu, Japan, 8 March 2002; pp. 267–268. (In Japanese). [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tpump [s] | Abutment | Run |
|---|---|---|
| 15 | Abutment, backfill | 1, 2 |
| 30 | Abutment, backfill | 1, 2 |
| 50 | Abutment, backfill | 1, 2 |
| 15 | Only backfill (no abutment) | 1, 2 |
| 30 | Only backfill (no abutment) | 1, 2 |
| 50 | Only backfill (no abutment) | 1, 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakamura, T.; Nakai, Y.; Cho, Y.-H.; Mizutani, N. Modeling Tsunami-Induced Erosion of Bridge-Abutment Backfill. J. Mar. Sci. Eng. 2020, 8, 922. https://doi.org/10.3390/jmse8110922
Nakamura T, Nakai Y, Cho Y-H, Mizutani N. Modeling Tsunami-Induced Erosion of Bridge-Abutment Backfill. Journal of Marine Science and Engineering. 2020; 8(11):922. https://doi.org/10.3390/jmse8110922
Chicago/Turabian StyleNakamura, Tomoaki, Yuto Nakai, Yong-Hwan Cho, and Norimi Mizutani. 2020. "Modeling Tsunami-Induced Erosion of Bridge-Abutment Backfill" Journal of Marine Science and Engineering 8, no. 11: 922. https://doi.org/10.3390/jmse8110922
APA StyleNakamura, T., Nakai, Y., Cho, Y.-H., & Mizutani, N. (2020). Modeling Tsunami-Induced Erosion of Bridge-Abutment Backfill. Journal of Marine Science and Engineering, 8(11), 922. https://doi.org/10.3390/jmse8110922