Performance Assessment of Three Turbulence Models Validated through an Experimental Wave Flume under Different Scenarios of Wave Generation



Abstract
1. Introduction
2. Description of the Wave Flume
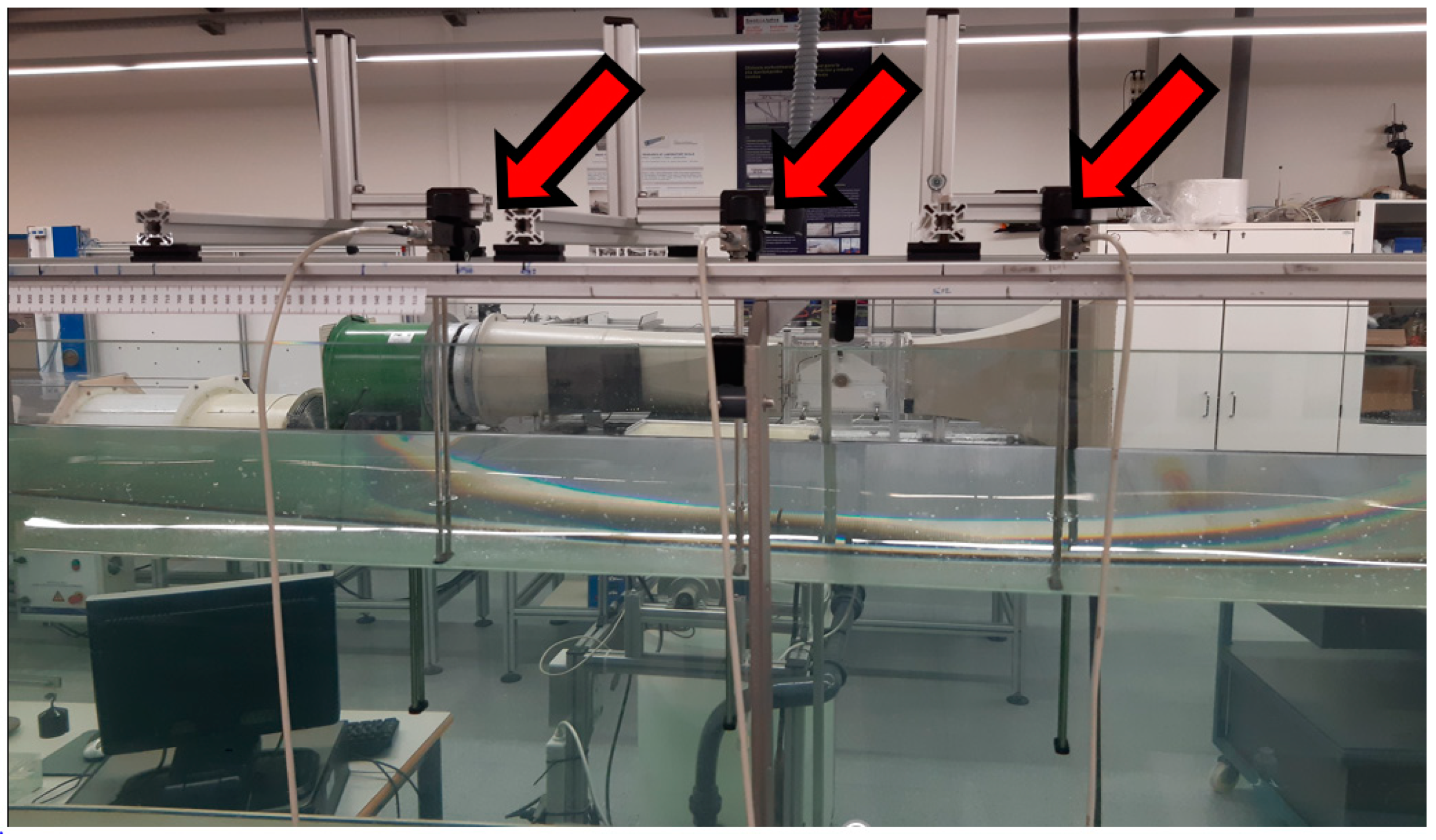
2.1. Experimental Wave Flume
2.2. Numerical Wave Flume
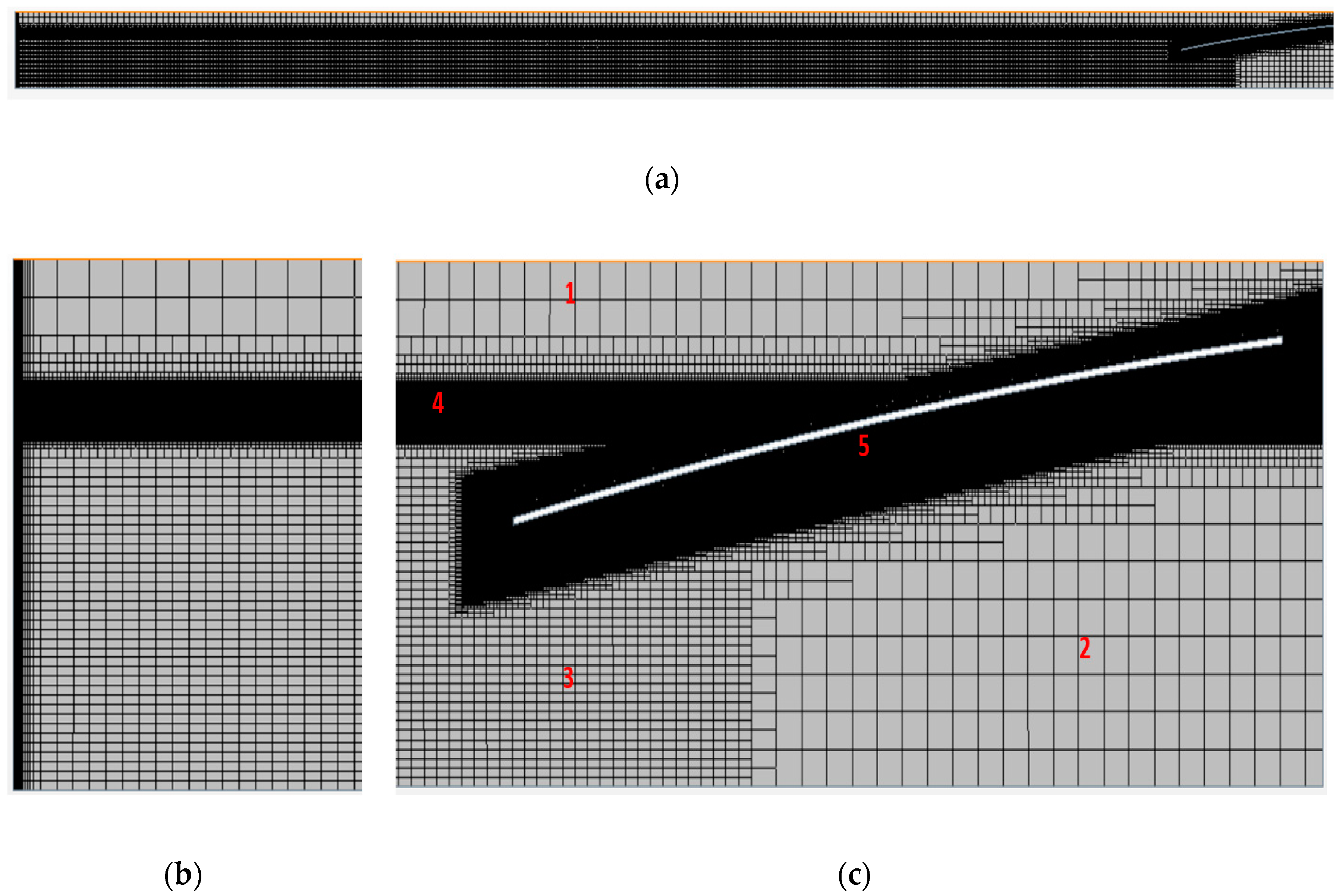
2.2.1. The Mesh
2.2.2. Reynolds-Averaged Navier–Stokes Equations (RANS)
2.2.3. Volume of Fluid Method
3. Aims and Methodology
3.1. Experimental Procedures
3.2. Data Processing by MATLAB
3.3. Numerical
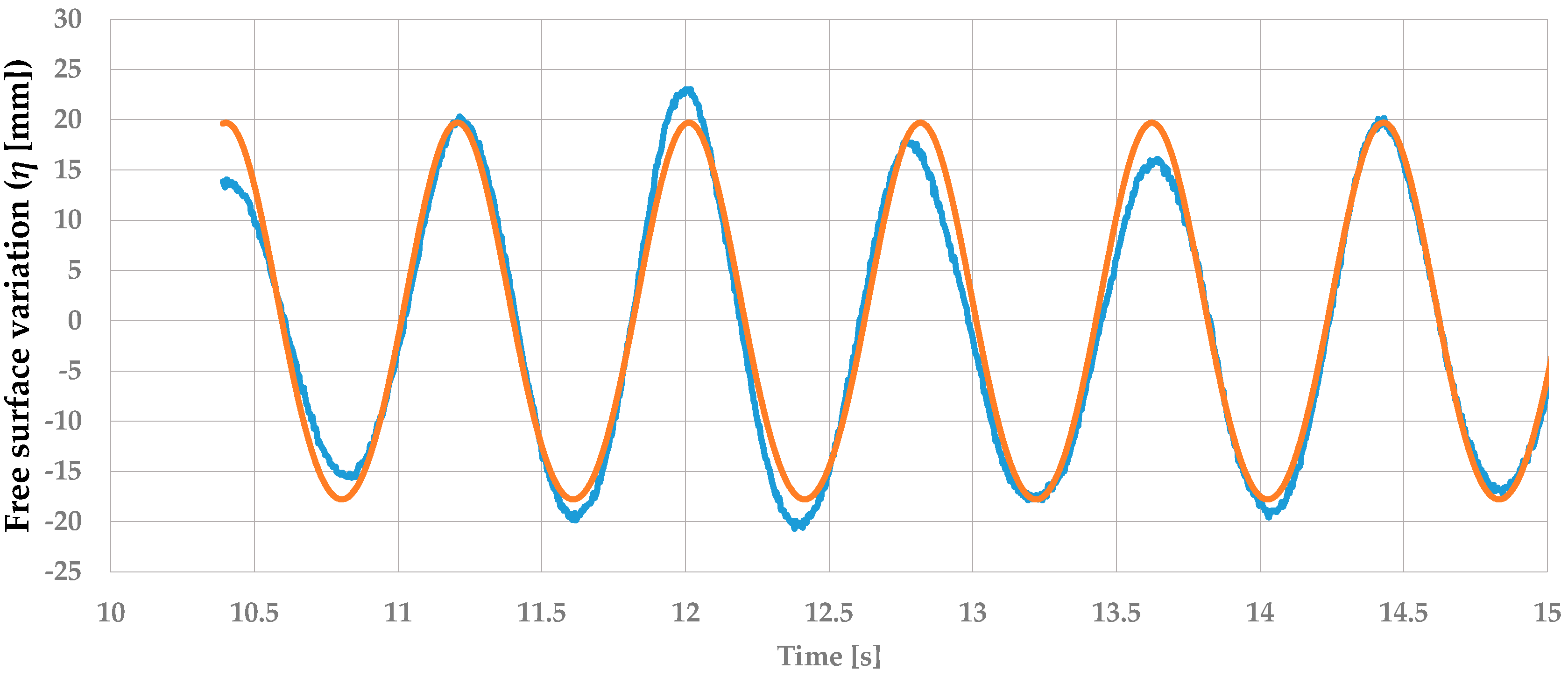
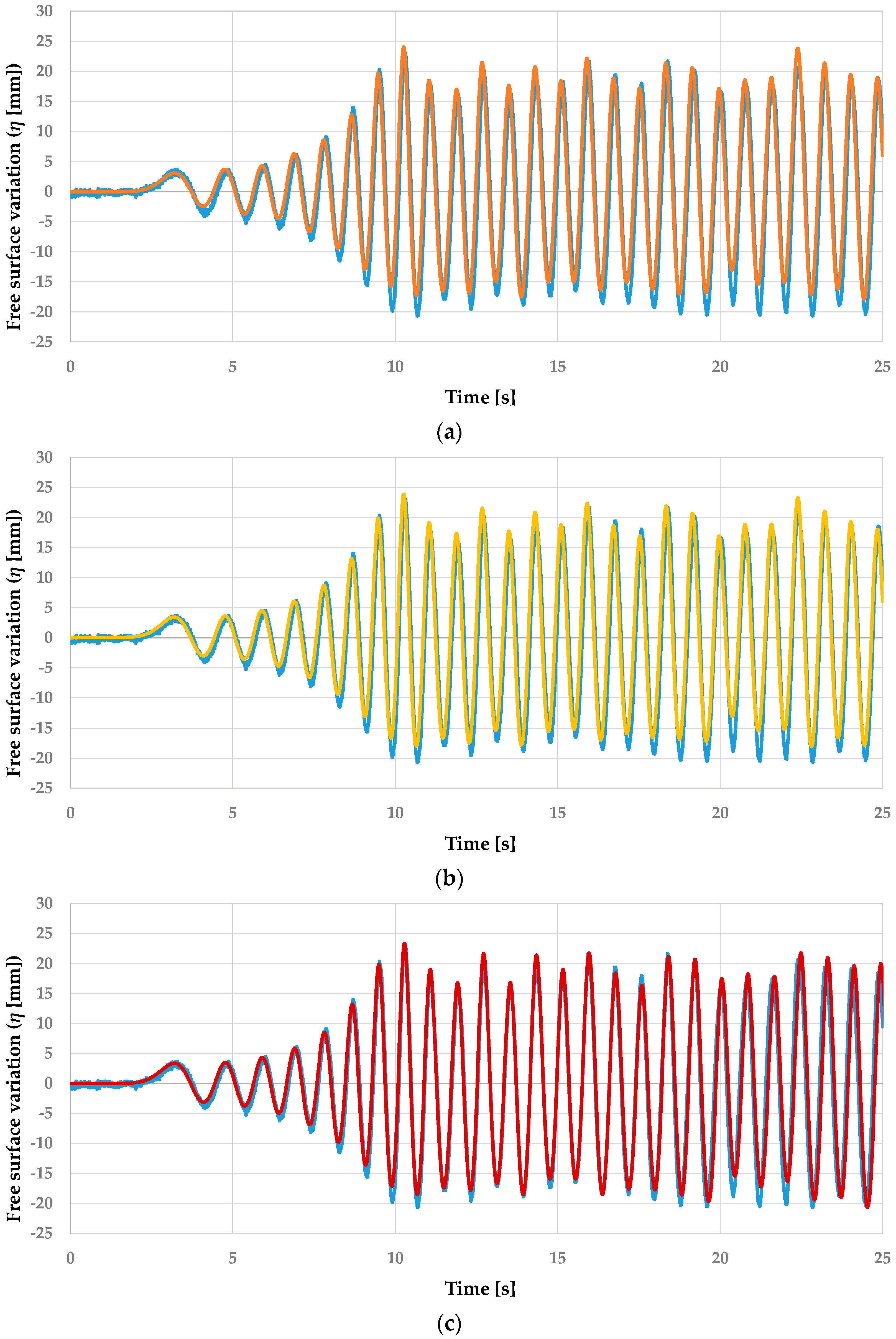
3.4. Results Comparison
4. Turbulence Models
4.1. The Low Reynolds k-ε Model
ū(∂ε/∂x) + v(∂ε/∂y) = (∂/∂y)[(ν + (νt/σk)) (∂ε/∂y)] + Cε1f1(ε/k)νt(∂u/∂y)2 − Cε2f2(ε2/k) + Ε.
4.2. The Shear Stress Transport (SST) Model
4.3. Large-Eddy Simulation (LES)
∂ρui/∂t + ∂ρuiuj/∂xj + ∂p/∂xi − ∂σij/∂xj ≈ − ∂τij/∂xj
∂ρE/∂t + ∂(ρE + p)uj/∂xj − ∂uiσij/∂xi − ∂qj/∂xj ≈ − 1/γ−1 ∂(puj − puj)/∂xj − uj(∂τij/∂xj).
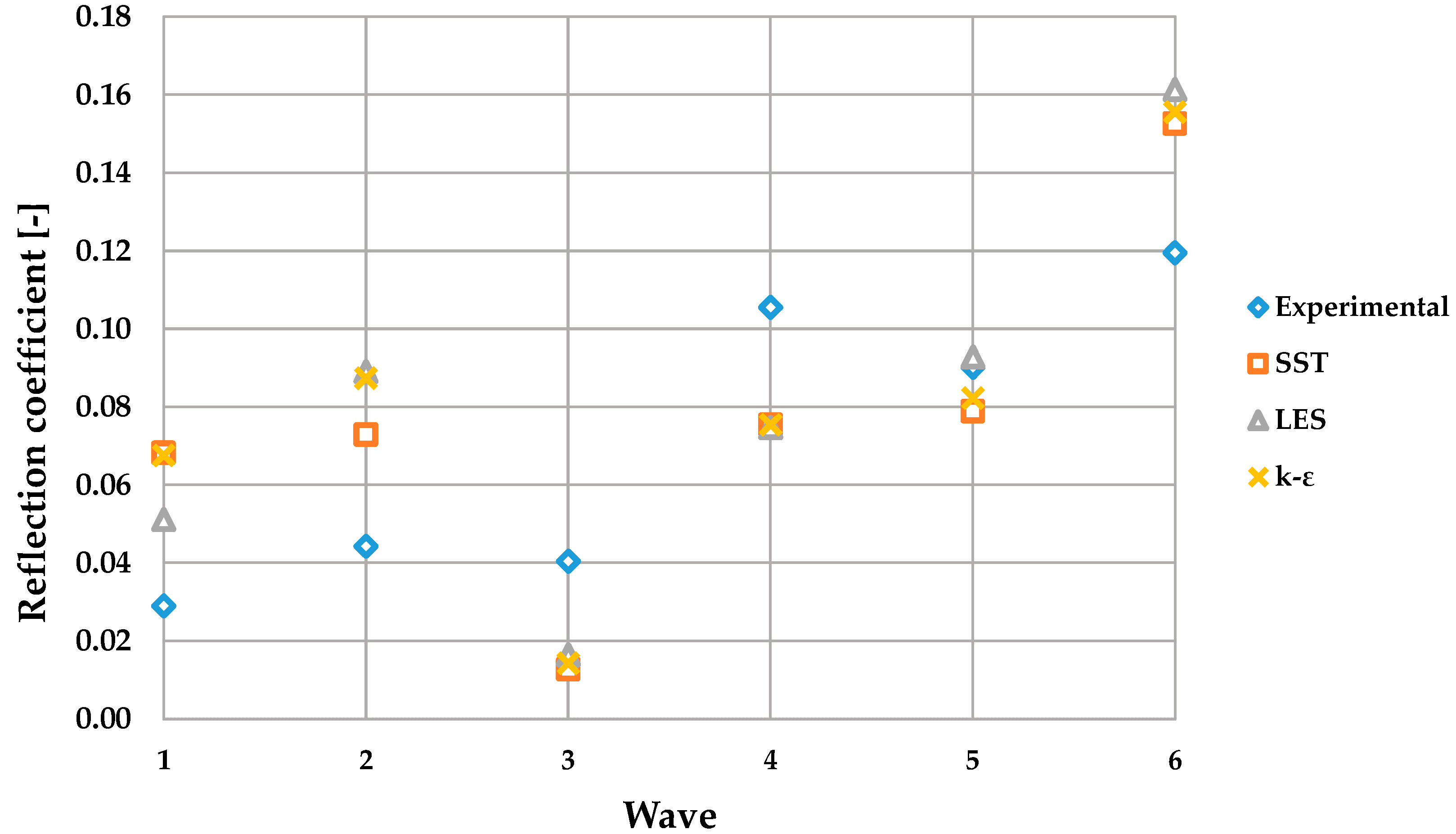
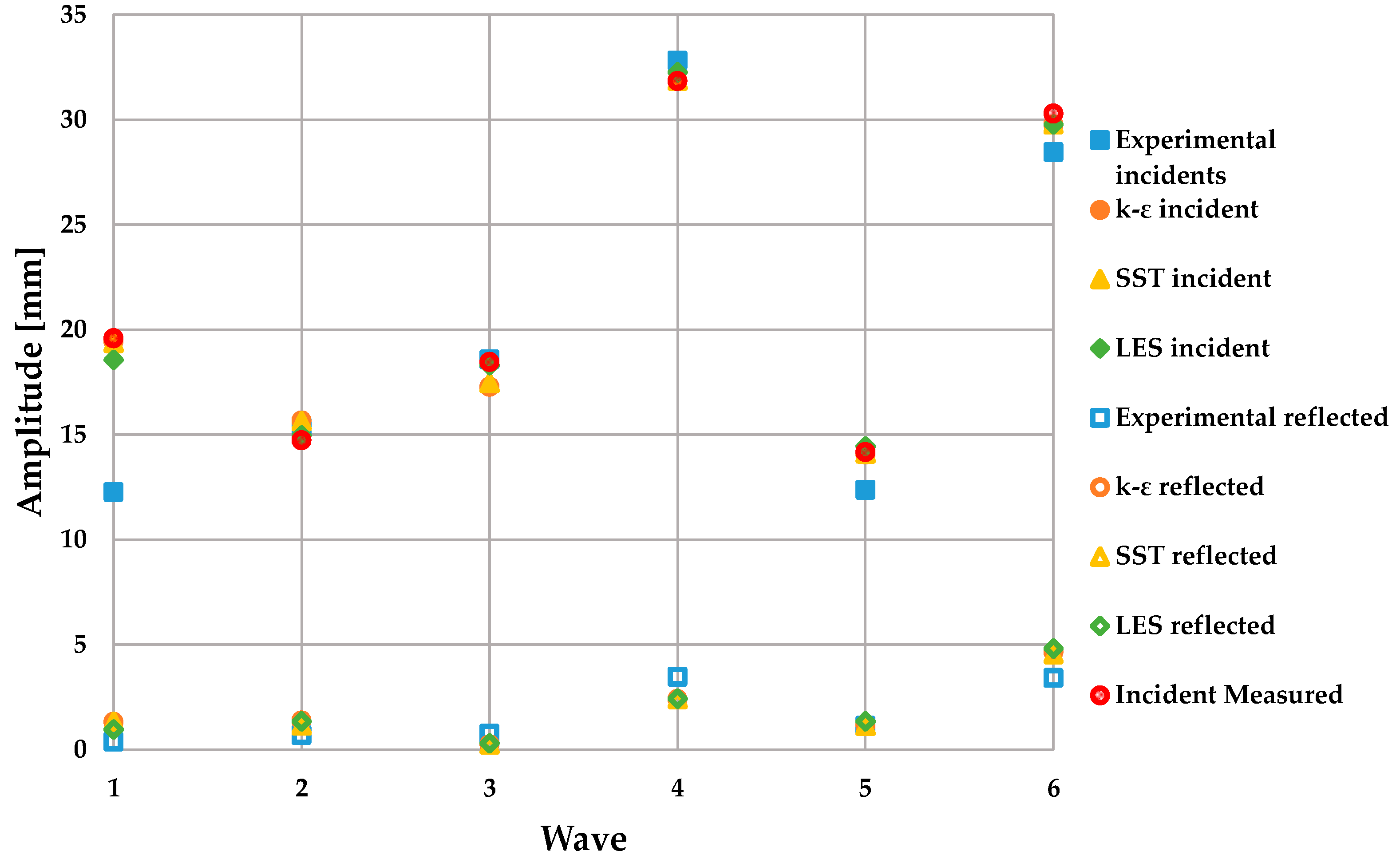
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| A | Amplitude |
| AI | Amplitude of the incident wave |
| AR | Amplitude of the reflected wave |
| AR | Aspect Ratio |
| c | Wave celerity |
| CFD | Computational Fluid Dynamics |
| Cμ | k-ε model constant |
| EWF | Experimental Wave Flume |
| FOWT | Floating Offshore Wind Turbine |
| FSH | Free Surface Height |
| fμ | Damping function |
| H | Wave Height |
| K | Reflection Coefficient |
| k | Kinetic energy |
| LTank | Tank Length |
| LES | Large Eddy Simulation |
| NWT | Numerical Wave Tank |
| OWC | Oscillating Water Column |
| p | Pressure |
| RANS | Reynolds-Average Navier Stokes |
| SST | Shear Stress Transport |
| u | Fluid velocity |
| V | Volume of the cell |
| v | velocity |
| vg | Grid velocity |
| VOF | Volume of Fluid |
| xi | Position of the probe |
| αi | Volume Fraction of a fluid |
| Δ | Length Scale |
| ε | Turbulence dissipation rate |
| η | Free Surface Position |
| μ | Dynamic viscosity |
| νt | Kinematic viscosity |
| ω | Specific dissipation rate |
| σε | Prandtl constant for turbulence dissipation rate |
| Sij | Mean strain-rate tensor |
| σk | Prandtl constant for kinematic energy |
| T | Period |
| t | time |
| τij | Favre_averaged specific Reynolds-stress tensor |
| τxy | Favre-specific Reynolds shear stress |
| μT | Subgrid viscosity |
| NWF | Numerical Wave Flume |
References
- Khait, A.; Shemer, L. Nonlinear wave generation by a wavemaker in deep to intermediate water depth. Ocean Eng. 2019. [Google Scholar] [CrossRef]
- Hieu, P.D.; Katsutoshi, T.; Ca, V.T. Numerical simulation of breaking waves using a two-phase flow model. Appl. Math. Model. 2004, 28, 983–1005. [Google Scholar] [CrossRef]
- Zhou, Y.; Xiao, Q.; Liu, Y.; Incecik, A.; Peyrard, C.; Li, S.; Pan, G. Numerical modelling of dynamic responses of a floating offshore wind turbine subject to focused waves. Energies 2019, 12. [Google Scholar] [CrossRef]
- Saincher, S.; Banerjee, J. Design of a numerical wave tank and wave flume for low steepness waves in deep and intermediate water. In Proceedings of the Procedia Engineering; Elsevier Ltd.: Amsterdam, The Netherlands, 2015; Volume 116, pp. 221–228. [Google Scholar]
- Izquierdo, U.; Esteban, G.A.; Blanco, J.M.; Albaina, I.; Peña, A. Experimental validation of a CFD model using a narrow wave fl ume. Appl. Ocean Res. 2019, 86, 1–12. [Google Scholar] [CrossRef]
- Zhao, X.Z.; Hu, C.H.; Sun, Z.C. Numerical simulation of extreme wave generation using VOF method. J. Hydrodyn. 2010, 22, 466–477. [Google Scholar] [CrossRef]
- Casalone, P.; Dell’Edera, O.; Fenu, B.; Giorgi, G.; Sirigu, S.A.; Mattiazzo, G. Unsteady RANS CFD Simulations of Sailboat’s Hull and Comparison with Full-Scale Test. J. Mar. Sci. Eng. 2020, 8, 394. [Google Scholar] [CrossRef]
- Argyropoulos, C.D.; Markatos, N.C. Recent advances on the numerical modelling of turbulent flows. Appl. Math. Model. 2015, 39, 693–732. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Gingold, R.A.; Monaghan, J.J. Smoothed particle hydrodynamics: Theory and application to non-spherical stars. Mon. Not. R. Astron. Soc. 1977, 181, 375–389. [Google Scholar] [CrossRef]
- Hanjalic, K. Will RANS survive LES? A view of perspectives. J. Fluids Eng. 2005, 127, 831–839. [Google Scholar] [CrossRef]
- Shih, T.H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A new k-ϵ eddy viscosity model for high reynolds number turbulent flows. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Menter, F. Zonal Two Equation k-w Turbulence Models For Aerodynamic Flows. In Proceedings of the 23rd Fluid Dynamics, Plasmadynamics, and Lasers Conference, Orlando, FL, USA, 6–9 July 1993. [Google Scholar]
- Launder, B.E.; Sharma, B.I. Application of the energy-dissipation model of turbulence to the calculation of flow near a spinning disc. Lett. Heat Mass Transf. 1974, 1, 131–138. [Google Scholar] [CrossRef]
- Wu, Y.-T.; Hsiao, S.-C. Propagation of Solitary Waves over Double Submerged Barriers. Water 2017, 9, 917. [Google Scholar] [CrossRef]
- Wu, Y.-T.; Hsiao, S.-C. Propagation of Solitary Waves over a Submerged Slotted Barrier. J. Mar. Sci. Eng. 2020, 8, 419. [Google Scholar] [CrossRef]
- Larmaei, M.M.; Mahdi, T.F. Simulation of shallow water waves using VOF method. J. Hydro-Environ. Res. 2010, 3, 208–214. [Google Scholar] [CrossRef]
- Xie, Z. Two-phase flow modelling of spilling and plunging breaking waves. Appl. Math. Model. 2013, 37, 3698–3713. [Google Scholar] [CrossRef]
- Bakhtyar, R.; Barry, D.A.; Yeganeh-Bakhtiary, A.; Ghaheri, A. Numerical simulation of surf-swash zone motions and turbulent flow. Adv. Water Resour. 2009, 32, 250–263. [Google Scholar] [CrossRef]
- Wilcox, D.C. Reassessment of the scale-determining equation for advanced turbulence models. AIAA J. 1988, 26, 1299–1310. [Google Scholar] [CrossRef]
- Devolder, B.; Rauwoens, P.; Troch, P. Application of a buoyancy-modified k-ω SST turbulence model to simulate wave run-up around a monopile subjected to regular waves using OpenFOAM®. Coast. Eng. 2017, 125, 81–94. [Google Scholar] [CrossRef]
- Devolder, B.; Troch, P.; Rauwoens, P. Performance of a buoyancy-modified k-ω and k-ω SST turbulence model for simulating wave breaking under regular waves using OpenFOAM®. Coast. Eng. 2018, 138, 49–65. [Google Scholar] [CrossRef]
- Higuera, P.; Lara, J.L.; Losada, I.J. Realistic wave generation and active wave absorption for Navier-Stokes models. Application to OpenFOAM®. Coast. Eng. 2013, 71, 102–118. [Google Scholar] [CrossRef]
- Jacobsen, N.G.; Fredsoe, J. Formation and development of a breaker bar under regular waves. Part 2: Sediment transport and morphology. Coast. Eng. 2014, 88, 55–68. [Google Scholar] [CrossRef]
- Jacobsen, N.G.; Fredsoe, J.; Jensen, J.H. Formation and development of a breaker bar under regular waves. Part 1: Model description and hydrodynamics. Coast. Eng. 2014, 88, 182–193. [Google Scholar] [CrossRef]
- Oggiano, L.; Pierella, F.; Nygaard, T.A.; De Vaal, J.; Arens, E. Reproduction of steep long crested irregular waves with CFD using the VOF method. In Proceedings of the Energy Procedia; Elsevier Ltd.: Amsterdam, The Netherlands, 2017; Volume 137, pp. 273–281. [Google Scholar]
- Sasson, M.; Chai, S.; Beck, G.; Jin, Y.; Rafieshahraki, J. A comparison between Smoothed-Particle Hydrodynamics and RANS Volume of Fluid method in modelling slamming. J. Ocean Eng. Sci. 2016, 1, 119–128. [Google Scholar] [CrossRef]
- Deardorff, J.W. A numerical study of three-dimensional turbulent channel flow at large Reynolds numbers. J. Fluid Mech. 1970, 41, 453–480. [Google Scholar] [CrossRef]
- Lakehal, D.; Liovic, P. Turbulence structure and interaction with steep breaking waves. J. Fluid Mech. 2011, 674, 522–577. [Google Scholar] [CrossRef]
- Lubin, P.; Vincent, S.; Abadie, S.; Caltagirone, J.P. Three-dimensional Large Eddy Simulation of air entrainment under plunging breaking waves. Coast. Eng. 2006, 53, 631–655. [Google Scholar] [CrossRef]
- Thorimbert, Y.; Latt, J.; Cappietti, L.; Chopard, B. Virtual wave flume and Oscillating Water Column modeled by lattice Boltzmann method and comparison with experimental data. Int. J. Mar. Energy 2016, 14, 41–51. [Google Scholar] [CrossRef]
- Delta Electronics Inc. ASDASoft Software. Available online: https://www.deltaww.com/ (accessed on 27 August 2020).
- Hughes, S.A. Physical Models and Laboratory Techniques in Coastal Engineering; Advanced Series on Ocean Engineering; World Scientific: Singapore, 1993; Volume 7, ISBN 978-981-02-1540-8. [Google Scholar]
- Izquierdo Ereño, U.; Galera-Calero, L.; Albaina, I.; Esteban, G.A.; Aristondo, A.; Blanco, J.M. Experimental and numerical characterisation of a 2D wave flume. DYNA Ing. E Ind. 2019, 94, 662–668. [Google Scholar] [CrossRef]
- Mansard, E.P.; Funke, E.R. The Measurement of Incident and Reflected Spectra Using a Least Squares Method. In Proceedings of the 17th Coastal Engineering Conference, Sydney, Australia, 29 January 1980; pp. 154–172. [Google Scholar]
- SIEMENS. STAR-CCM+ User Guide; Version 14.06; SIEMENS: Munich, Germany, 2019. [Google Scholar]
- Kolmogorov, A.N. Equations of turbulen motion of an incompressible fluid. Izv Acad. Sci. USSR Phys. 1942, 6, 56–58. [Google Scholar]
- Ben-Nasr, O.; Hadjadj, A.; Chaudhuri, A.; Shadloo, M.S. Assessment of subgrid-scale modeling for large-eddy simulation of a spatially-evolving compressible turbulent boundary layer. Comput. Fluids 2017, 151, 144–158. [Google Scholar] [CrossRef]
- Le Méhauté, B. An Introduction to Hydrodynamics and Water Waves; Springler-Verlag: New York, NY, USA, 1976; ISBN 0-387-07232-2. [Google Scholar]
- BIMEP. Available online: https://www.bimep.com/en/ (accessed on 1 August 2020).
- Barrera, C.; Losada, I.J.; Guanche, R.; Johanning, L. The influence of wave parameter definition over floating wind platform mooring systems under severe sea states. Ocean Eng. 2019, 172, 105–126. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h (m) | H (mm) | T (s) | λ (m) | c (m/s) | |
|---|---|---|---|---|---|
| Wave 1 | 0.3 | 40 | 1.25 | 1.88 | 1.54 |
| Wave 2 | 0.3 | 30 | 1.42 | 2.20 | 1.54 |
| Wave 3 | 0.4 | 39 | 0.81 | 1.01 | 1.24 |
| Wave 4 | 0.4 | 64 | 1.27 | 2.11 | 1.65 |
| Wave 5 | 0.5 | 29 | 1.20 | 2.06 | 1.71 |
| Wave 6 | 0.5 | 60 | 1.42 | 2.64 | 1.85 |
| H (mm) | T (s) | λ (m) | c (m/s) | Error H (%) | Error T (%) | Error λ (%) | Error c (%) | |
|---|---|---|---|---|---|---|---|---|
| Wave 1 | 42.07 | 1.25 | 1.78 | 1.42 | 5.41 | −0.63 | −7.08 | −6.48 |
| Wave 2 | 30.04 | 1.41 | 2.10 | 1.49 | 0.14 | 1.19 | 4.59 | 3.40 |
| Wave 3 | 36.89 | 0.79 | 0.99 | 1.24 | 5.39 | 1.36 | 1.47 | 0.10 |
| Wave 4 | 66.29 | 1.27 | 2.11 | 1.65 | 3.58 | 0.15 | 0.15 | 0.01 |
| Wave 5 | 28.34 | 1.18 | 2.02 | 1.71 | 2.26 | 1.80 | 1.83 | 0.03 |
| Wave 6 | 56.50 | 1.41 | 2.68 | 1.90 | 5.82 | 1.23 | 1.78 | 3.06 |
| H (mm) | T (s) | λ (m) | c (m/s) | Error H (%) | Error T (%) | Error λ (%) | Error c (%) | |
|---|---|---|---|---|---|---|---|---|
| Wave 1 | 39.15 | 1.25 | 1.84 | 1.46 | −6.96 | −0.09 | 3.30 | 2.54 |
| Wave 2 | 29.42 | 1.42 | 2.20 | 1.54 | −2.08 | 0.64 | 4.48 | 3.19 |
| Wave 3 | 36.90 | 0.80 | 1.00 | 1.24 | −5.39 | −1.36 | −1.24 | −0.69 |
| Wave 4 | 63.65 | 1.27 | 2.14 | 1.67 | −3.99 | −0.70 | 1.06 | 0.86 |
| Wave 5 | 28.31 | 1.20 | 2.18 | 1.81 | −0.12 | 1.25 | 7.47 | 5.76 |
| Wave 6 | 60.56 | 1.42 | 2.68 | 1.87 | 7.17 | 0.69 | −0.37 | −1.97 |
| H (mm) | T (s) | λ (m) | c (m/s) | Error H (%) | Error T (%) | Error λ (%) | Error c (%) | |
|---|---|---|---|---|---|---|---|---|
| Wave 1 | 39.28 | 1.25 | 1.88 | 1.49 | −6.65 | −0.09 | 5.54 | 4.65 |
| Wave 2 | 29.52 | 1.42 | 2.22 | 1.55 | −1.74 | 0.64 | 5.43 | 3.86 |
| Wave 3 | 36.89 | 0.80 | 1.00 | 1.24 | −5.39 | −1.36 | −1.24 | −0.69 |
| Wave 4 | 63.12 | 1.28 | 2.03 | 1.59 | −4.79 | 0.09 | −4.13 | −3.97 |
| Wave 5 | 28.29 | 1.19 | 1.97 | 1.65 | −0.19 | 0.40 | −2.88 | −3.59 |
| Wave 6 | 59.64 | 1.42 | 2.84 | 1.99 | 5.54 | 0.69 | 5.58 | 4.33 |
| H (mm) | T (s) | λ (m) | c (m/s) | Error H (%) | Error T (%) | Error λ (%) | Error c (%) | |
|---|---|---|---|---|---|---|---|---|
| Wave 1 | 37.73 | 1.26 | 1.88 | 1.49 | −10.34 | 0.55 | 5.51 | 4.93 |
| Wave 2 | 28.31 | 1.43 | 2.21 | 1.55 | −5.76 | 1.10 | 5.01 | 3.87 |
| Wave 3 | 36.89 | 0.81 | 1.01 | 1.24 | −5.39 | −0.06 | −0.49 | −0.43 |
| Wave 4 | 62.44 | 1.28 | 2.03 | 1.59 | −5.82 | 0.27 | −3.91 | −4.16 |
| Wave 5 | 28.99 | 1.20 | 1.97 | 1.65 | 2.27 | 1.08 | −2.84 | −3.88 |
| Wave 6 | 58.91 | 1.42 | 2.84 | 2.00 | 4.25 | 0.84 | 5.57 | 4.68 |
| Hexp (mm) | Texp (s) | Hk-ε (mm) | Tk-ε (s) | Error H (%) | Error T (%) | |
|---|---|---|---|---|---|---|
| Wave 1 | 40.34 | 1.26 | 38.83 | 1.25 | −3.73 | −0.79 |
| Wave 2 | 31.02 | 1.45 | 31.72 | 1.42 | 2.26 | −1.66 |
| Wave 3 | 37.13 | 0.81 | 34.46 | 0.81 | −7.19 | 0.41 |
| Wave 4 | 65.27 | 1.25 | 63.76 | 1.25 | −2.31 | 0.50 |
| Wave 5 | 28.50 | 1.18 | 28.05 | 1.20 | −1.61 | 1.88 |
| Wave 6 | 56.78 | 1.43 | 59.42 | 1.41 | 4.66 | −1.50 |
| Hexp (mm) | Texp (s) | HSST (mm) | TSST (s) | Error H (%) | Error T (%) | |
|---|---|---|---|---|---|---|
| Wave 1 | 40.34 | 1.26 | 38.69 | 1.25 | −4.08 | −0.78 |
| Wave 2 | 31.02 | 1.45 | 31.59 | 1.42 | 1.85 | −1.70 |
| Wave 3 | 37.13 | 0.81 | 34.80 | 0.81 | −6.28 | 0.30 |
| Wave 4 | 65.27 | 1.25 | 63.76 | 1.25 | −2.31 | 0.50 |
| Wave 5 | 28.50 | 1.18 | 28.16 | 1.20 | −1.21 | 1.87 |
| Wave 6 | 56.78 | 1.43 | 59.40 | 1.41 | 4.61 | −1.45 |
| Hexp (mm) | Texp (s) | HLES (mm) | TLES (s) | Error H (%) | Error T (%) | |
|---|---|---|---|---|---|---|
| Wave 1 | 40.34 | 1.26 | 37.10 | 1.26 | −8.03 | 0.05 |
| Wave 2 | 31.02 | 1.45 | 30.29 | 1.42 | −2.35 | −1.66 |
| Wave 3 | 37.13 | 0.81 | 36.47 | 0.81 | −1.76 | 0.68 |
| Wave 4 | 65.27 | 1.25 | 64.56 | 1.25 | −1.08 | 0.54 |
| Wave 5 | 28.50 | 1.18 | 28.82 | 1.20 | 1.12 | 1.89 |
| Wave 6 | 56.78 | 1.43 | 59.43 | 1.41 | 4.66 | −1.46 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galera-Calero, L.; Blanco, J.M.; Izquierdo, U.; Esteban, G.A. Performance Assessment of Three Turbulence Models Validated through an Experimental Wave Flume under Different Scenarios of Wave Generation. J. Mar. Sci. Eng. 2020, 8, 881. https://doi.org/10.3390/jmse8110881
Galera-Calero L, Blanco JM, Izquierdo U, Esteban GA. Performance Assessment of Three Turbulence Models Validated through an Experimental Wave Flume under Different Scenarios of Wave Generation. Journal of Marine Science and Engineering. 2020; 8(11):881. https://doi.org/10.3390/jmse8110881
Chicago/Turabian StyleGalera-Calero, Lander, Jesús María Blanco, Urko Izquierdo, and Gustavo Adolfo Esteban. 2020. "Performance Assessment of Three Turbulence Models Validated through an Experimental Wave Flume under Different Scenarios of Wave Generation" Journal of Marine Science and Engineering 8, no. 11: 881. https://doi.org/10.3390/jmse8110881
APA StyleGalera-Calero, L., Blanco, J. M., Izquierdo, U., & Esteban, G. A. (2020). Performance Assessment of Three Turbulence Models Validated through an Experimental Wave Flume under Different Scenarios of Wave Generation. Journal of Marine Science and Engineering, 8(11), 881. https://doi.org/10.3390/jmse8110881