Applicability of the Goda–Takahashi Wave Load Formula for Vertical Slender Hydraulic Structures

 ,
,  and
and
Abstract
1. Introduction
2. Literature Review
2.1. Equivalent-Static Wave Loads
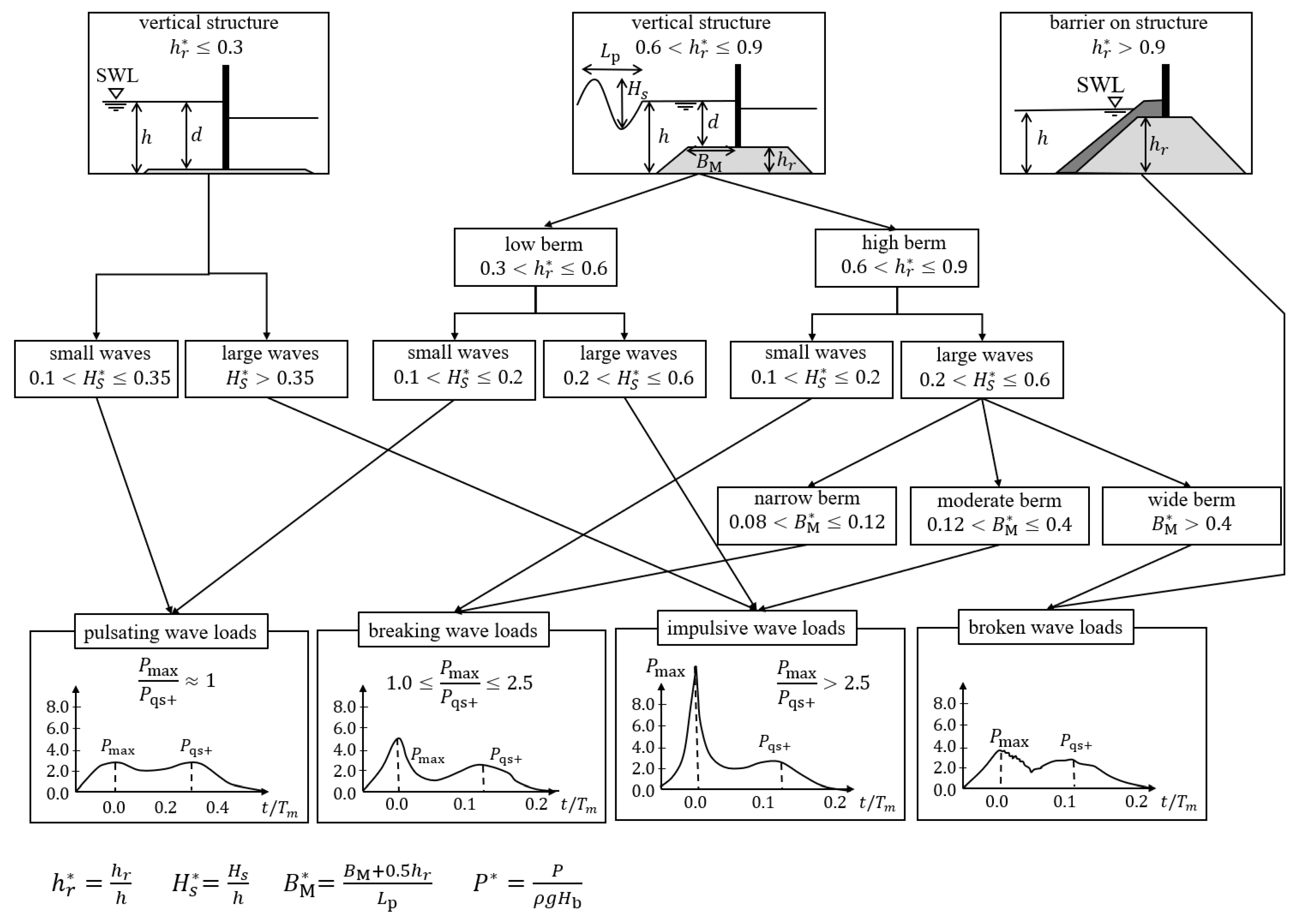
2.2. Wave Loading Types
- Pulsating wave loads are gently varying forces due to the reflection of windwaves of low to medium steepness on a vertical wall. Typical wave periods are in the order of s [13].
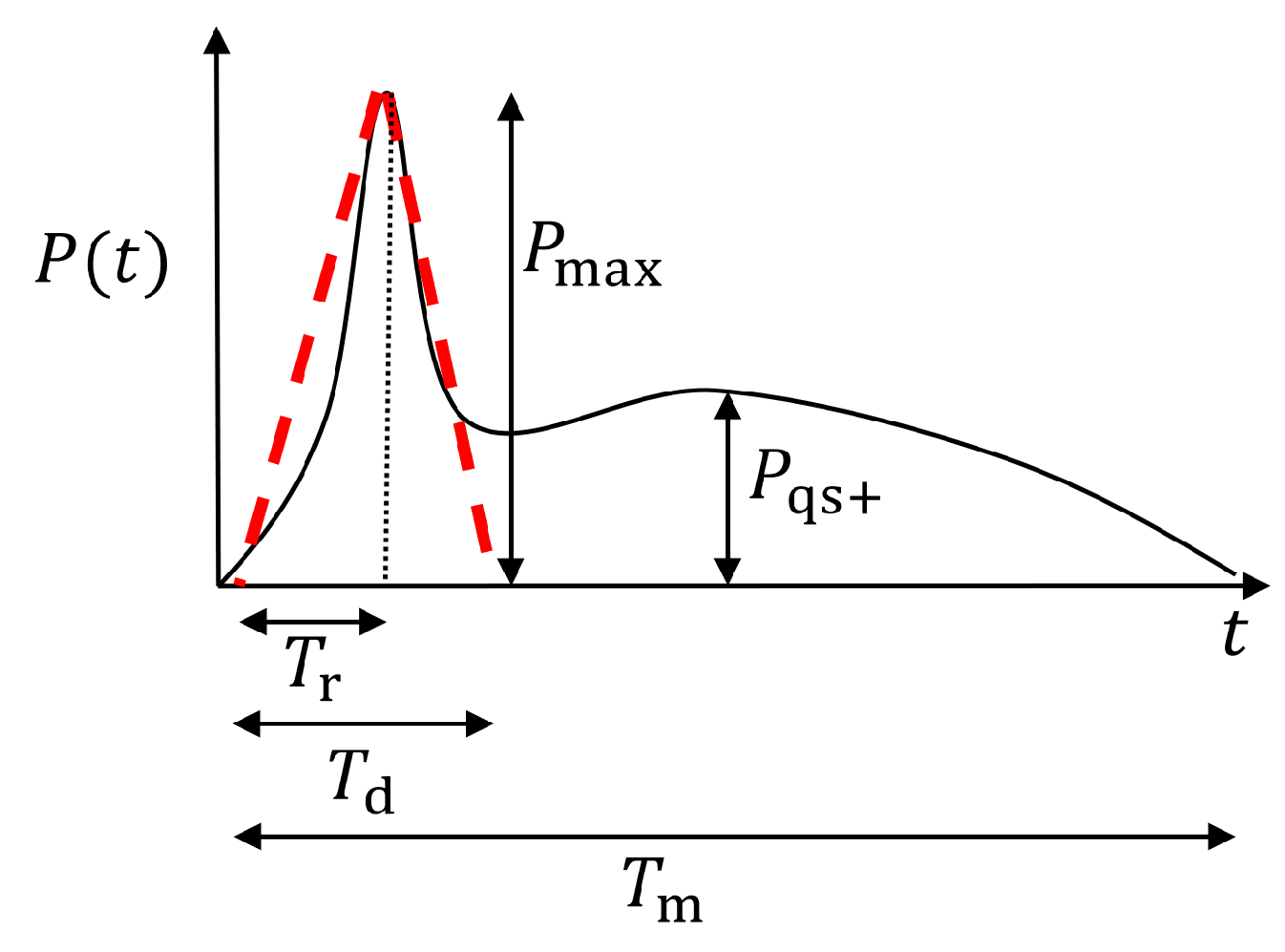
- (Slightly) breaking and impulsive wave loads occur when the incoming wave is high as compared to the water depth, combined with a steep sea-bottom or the presence of a rubble mound. The time-histories of breaking or impulsive wave loads consists of two components; a first peak of relatively short duration (), followed by a second, (s)lower wave peak () with duration around the mean wave period (see also Section 3.2.1). The typical duration of the peak lies between 0.01–0.2 s with rise times between 0.1–30 ms, see e.g., [14,15,16]. For (slightly) breaking and impulsive wave loads the ratio between the maximum and quasi-static peak lies between . For impact wave loads it lies above . There exists a strong (negative) dependency between the loading magnitude and the duration of the peak , see [15,17].
- Post breaking waves occur when the waves break before they hit the structure. Their load history resembles that for slightly breaking wave loads. However, the presence of a large air content induces aerial damping which slightly decreases the magnitude and duration of the first breaking peak.
2.3. Dynamic Characteristics of Slender Hydraulic Structures
2.4. Dynamic Characteristics of Caisson Structures
2.5. Background on Goda–Takahashi Wave Load Formula
2.5.1. Formulation of the GT Wave Load Formula
Goda’s Original Wave Load Formula
Takahashi’s Extensions
2.5.2. Derivation of the Wave Load Formulae
Goda’s Original Wave Load Formula
- (1)
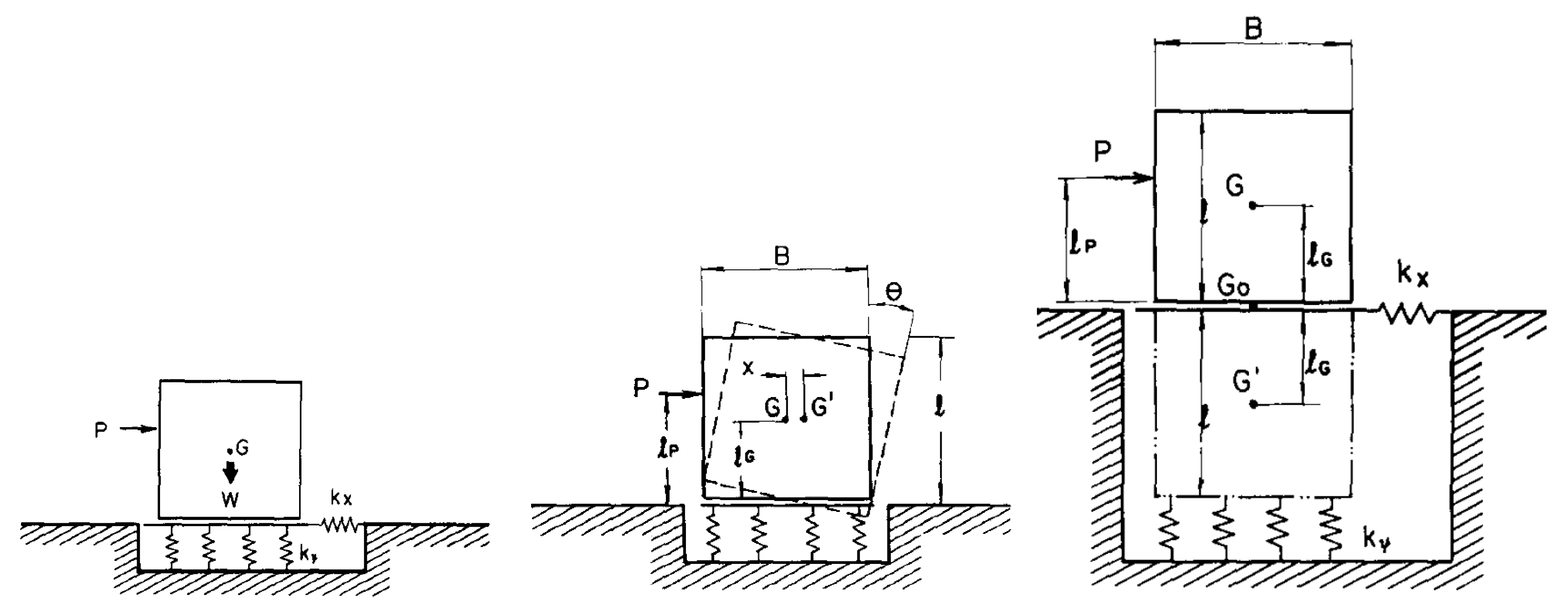
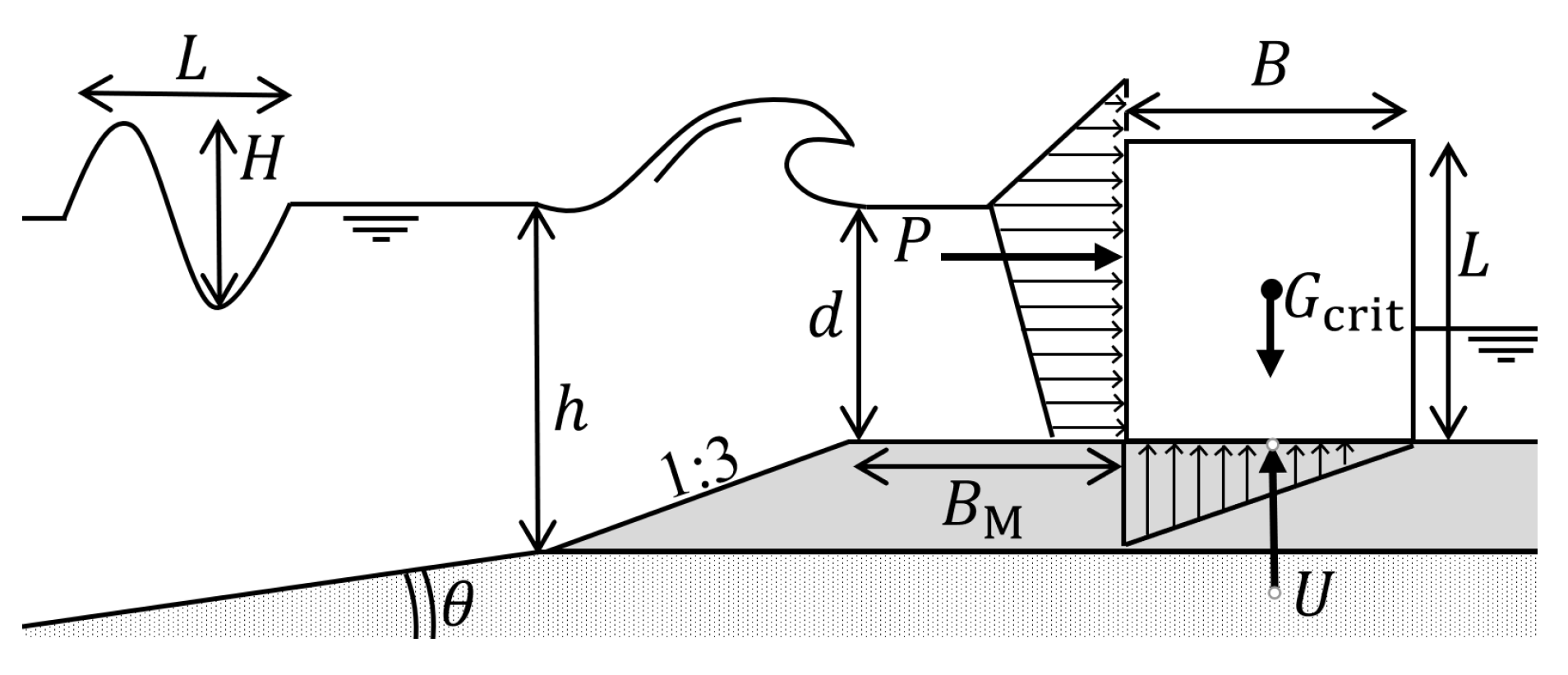
- In the early 1970s, Goda conducted a large number of sliding experiments of which the supposed experimental set-up is visualized in Figure 7. A model caisson breakwater with self-weight G was positioned in a wave flume on a rubble mound with (known) friction coefficient . At the beginning of the wave flume a (regular) test wave was generated. When the wave reached the structure, it exerted a (time-dependent) horizontal and uplift wave load on it. Next, the critical caisson weight was determined for which just no sliding occurred. This was then used to calculate the corresponding equivalent-static wave loads by Coulombs friction law: . For this step, an estimate was made on the effective uplift forces , of which the details are unknown. In the experiments, a large number different wave heights, wave periods, water levels, and mound heights were considered.
- (2)
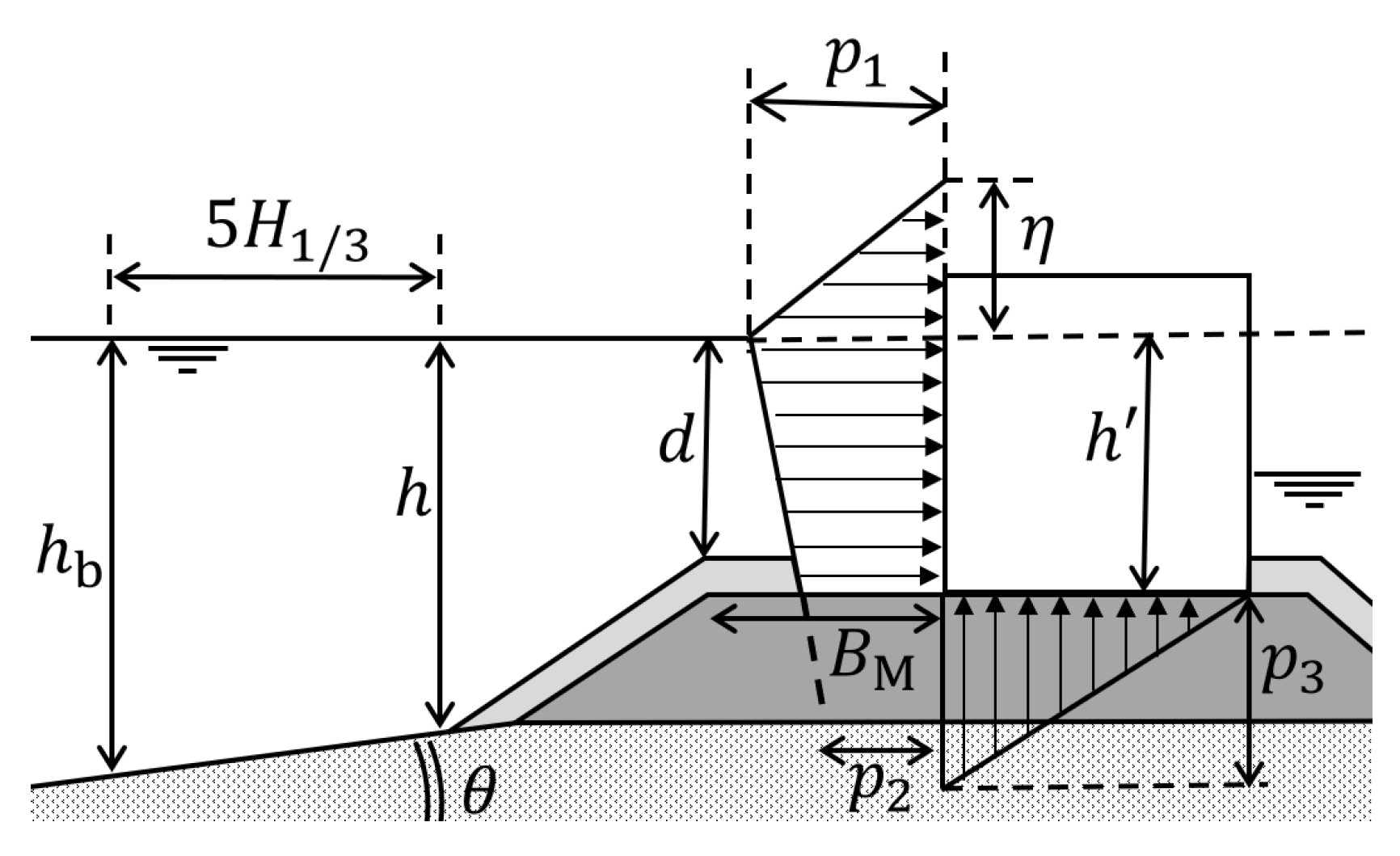
- In 1972, Goda performed a smaller number of experiments in a wave flume where horizontal and uplift wave pressures were measured using pressure transducers [34,35]. Different wave heights, wave periods, water levels, and mound heights were considered. Both pulsating, (slightly) breaking, or post-breaking waves were included (regular waves only). Together with theoretical considerations on fourth-order standing wave theory from Goda [36], an idealized shape of the incoming wave pressure distribution was derived such as described by Equation (5).
- (3)
- Given the equivalent-static wave loads derived in step (1), and the idealized shape of the pressure distribution from step (2), Goda subsequently back-calculated the values of to empirically fit the results from the sliding experiments. This resulted in the final expressions for . About this derivation Goda [28] stated: “The results of the experiments [...] as well as the requirement of simplicity in the application of formulae have brought the author to propose the distribution of design wave pressure [...]. The pressure factors of and have been determined empirically on the basis of experimental data and the calibration of new formulae with the case studies of prototype breakwaters. [...]. Though the agreement between the formulae and the laboratory data is not excellent, the difference may be disregarded for the purpose of general formulation of wave pressure estimation”.
- (4)
- After the formula was derived it was calibrated against case-studies from real breakwater failures during heavy seas, see Goda [28]. It is not entirely clear to the authors of this study if this calibration was used for validation purposes only, or whether it was also used to update the previously derived model from step (3).
Takahashi’s Extensions
2.6. Model Uncertainties in GT
2.6.1. Different Sources of Model Uncertainties
- Type (a) model uncertainties represent the uncertainties related to the lack of knowledge about the detailed interplay between the considered variables [40]. GT was derived empirically on the basis of a limited number of experiments including scaled model caissons and regular waves. It is however known that scaled wave loads do not fully represent reality [16], and neither do regular waves. Moreover, only a limited number of design situations was investigated and potentially important design situations may have been overlooked.
- Type (b) model uncertainties arise from the fact that the derivation of any model is guided by the balance between its ability to represent reality and the pragmatic need for simplicity and generality [40]. It was discussed in Section 2.5.2 that also in the derivation of Goda’s original wave load formula “requirements of simplicity” and “general formulation” have played an important role. Aspects that are for example deliberately ignored are: (i) the influence of wave over-topping on the pressure intensity at the height of the structure, or (ii) the influence of wave loading type on the shape of the pressure distribution, or (iii) the frequency-dependency of the caisson structures on the equivalent-static wave loads.
- The last type of model uncertainties is related to the application of a model outside of its intended scope. Reasons for this are either the lack of knowledge (no better model is available) or the need for simplicity (a more appropriate model is available but we choose to apply the less adequate model nonetheless). This inadequate application of the model introduces additional uncertainties which are referred to as type (c) model uncertainties. GT was derived to predict equivalent-static wave loads for the sliding and overturning failure mechanism of caisson breakwaters with natural periods between 0.1–0.3 s. It was not derived for the cross-sectional assessment of slender hydraulic structures with natural periods between 0.02 and 0.5 s. When applying GT to slender hydraulic structures it is thus clearly applied outside of its intended dynamic scope. The magnitude of the resulting type (c) uncertainties depends on the extent to which dynamic aspects play a role. In case of pulsating wave loads the type (c) uncertainties will be small, as both caissons and hydraulic structures will have a quasi-static response. In case of breaking or impact loads on hydraulic structures however the type (c) uncertainties become larger, as the dynamic response can differ.
2.6.2. Quantification of Model Uncertainties
3. Methodology
3.1. Bird-Eye Overview
- (1)
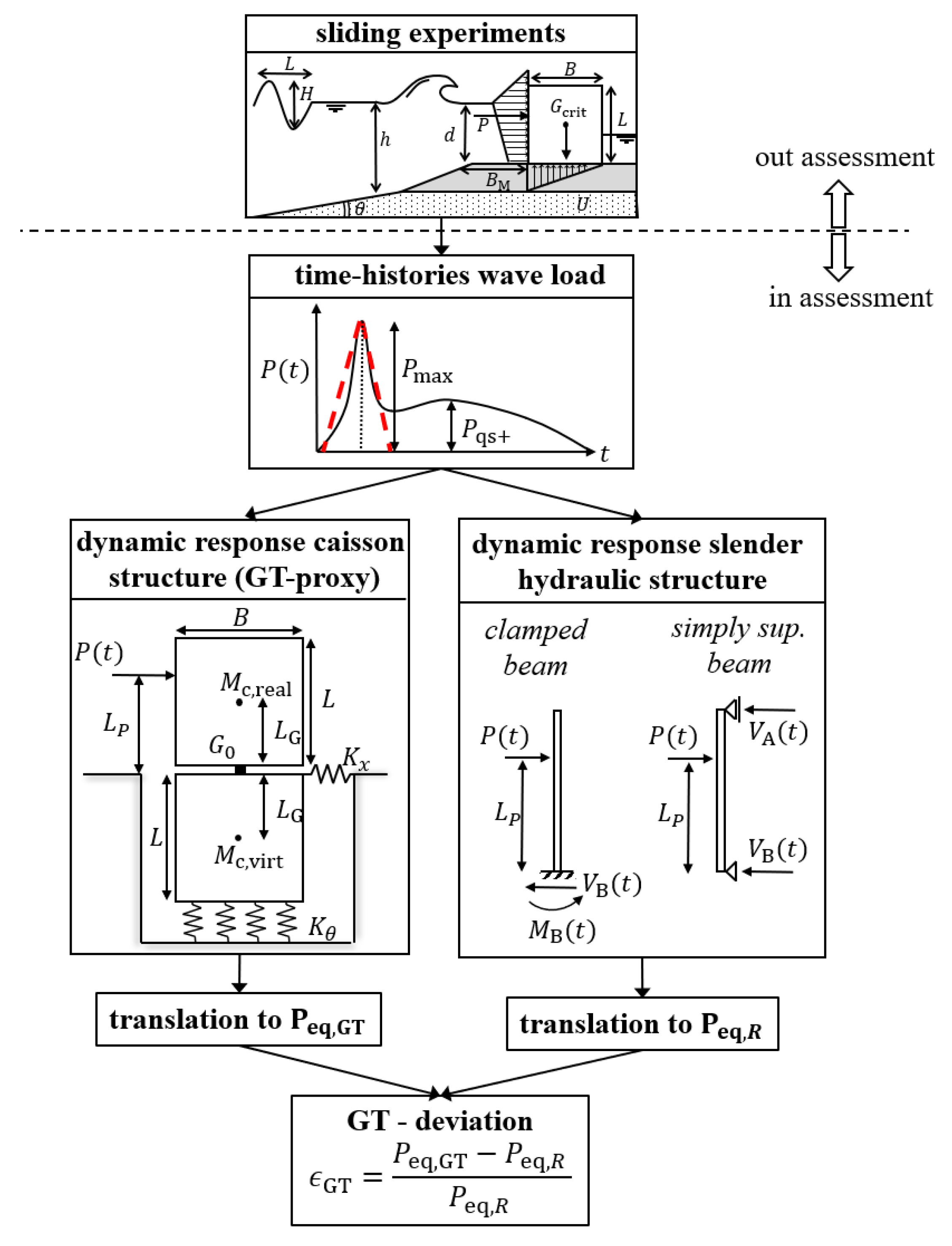
- First step is to attain a representative time-histories of an incoming wave load such as occurred within the sliding experiments. The exact generation mechanism behind this incoming wave load (such as the incoming wave dimensions, mound dimensions, etc.) is assumed to be known. For details on the wave load modeling see Section 3.2.
- (2)
- Based on an analytic dynamic model we then mimic the dynamic behavior of the caisson breakwater at base shear and quantify the corresponding equivalent-static wave loads (). The obtained value for then serves as a proxy for the equivalent-static wave loads as derived in the GT-sliding experiments. This is reasonable as long as: (i) the incoming wave load profiles resemble those underlying the GT-sliding experiments and () the analytic dynamic caisson model adequately describes the dynamic behavior of the model caissons within the GT-sliding experiments. This step is further elaborated in Section 3.3.
- (3)
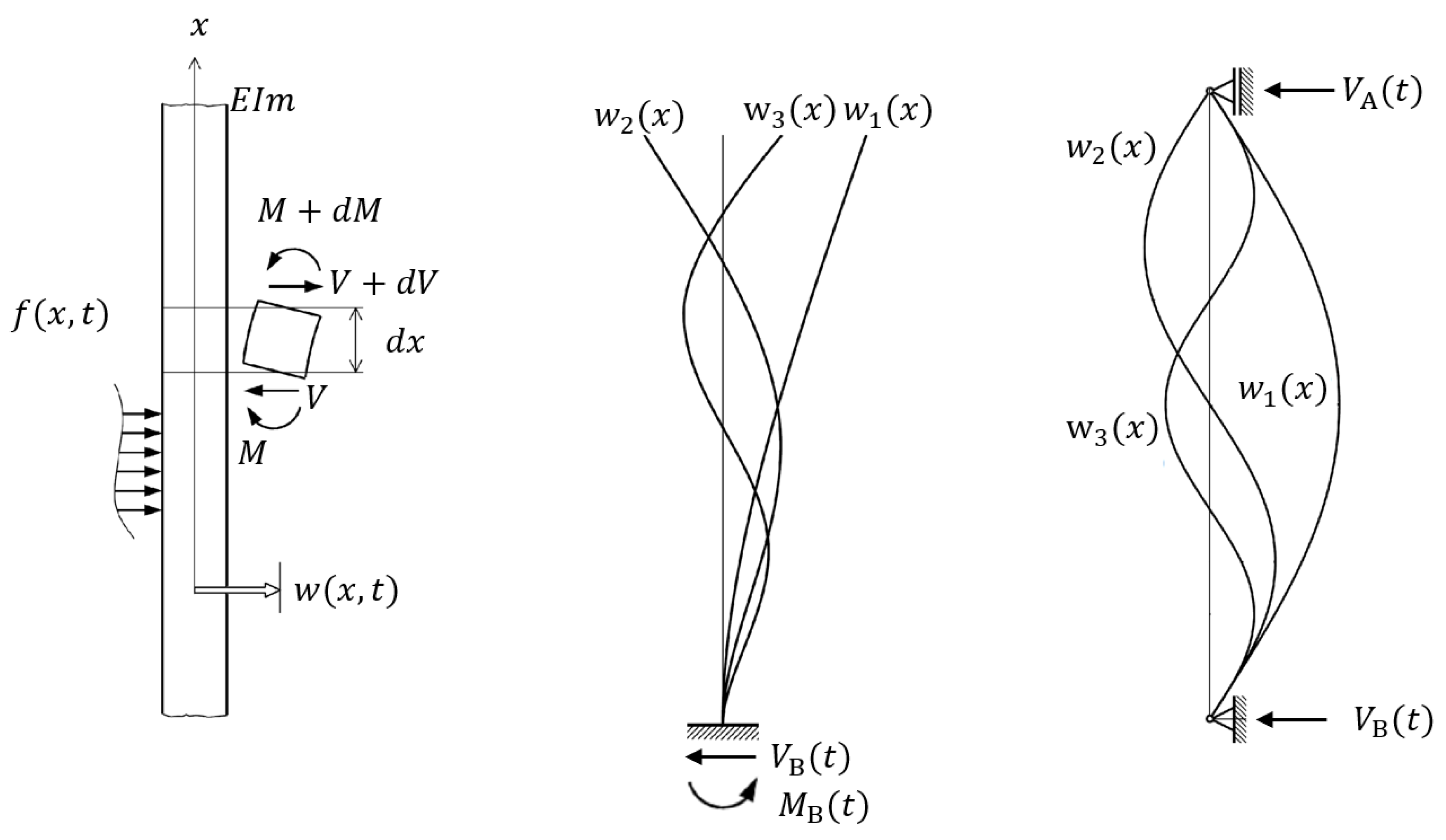
- Next, the equivalent-static wave loads for two typical slender hydraulic structures subjected to the same incoming wave load are determined. Two structural types are considered. The first is a 2D clamped plate whereby interest goes to the loads at base shear () and base moment (). The second is a 2D simply supported plate whereby interest goes to top shear () and bottom shear (). The clamped plate represents for example a typical splash-guard on top of a flood wall [11], and the simply supported plate represents for example the main beams of a rolling gate. This step is further elaborated in Section 3.4.
- (4)
- The difference in dynamic behavior is now referred to as the ’GT-deviation’ and is determined by:where is the proxy for the equivalent-static wave loads as obtained during the GT-sliding experiments and the equivalent-static wave load for the slender hydraulic structure subjected to the same incoming wave load.
3.2. Time-Histories of Incoming Wave Load
3.2.1. Church-Roof Wave Load Model
3.2.2. Correction for Quasi-Static Part of the Wave Load
3.2.3. Investigated Wave Loads
- Relative moment-arm (): The value of the relative moment arm is highly depending on the design situation under consideration (wave height, period, water level, etc.). Since the GT-sliding experiments contained a whole range of wave dimensions, water levels, and mound heights, it is expected that relative moment arms from high to low were represented in the experiments. In this study, we investigate the ratios .
- Impact duration (): The GT-sliding experiments embodied the whole range from slowly pulsating to heavily breaking or impact wave loads. It was found that typical impact durations were between 0.01–0.2 s (see Section 2.2) and it is expected that such orders of magnitude were embodied by the GT experiments as well. In this study, we therefore investigate the whole range of impact durations between .
- Relative rise time (): Depending on the breaker type in front of the caisson breakwater (flip through, vertical wave front, or plunging wave) different ratios for the rise time and total impact duration are observed in practice, see Cuomo et al. [42]. It is unknown what breaker types occurred during the GT-sliding experiments. In case no further information is provided, Cuomo et al. [16] suggest a symmetrical pulse shape (). This value is adopted in this study as well.
- Relative impact magnitude (): The GT-sliding experiments contained the whole range from pulsating to highly impulsive wave loads. It can thus be expected that the whole range of impact magnitudes between roughly have occurred. In analogy with the wave classification by Kortenhaus and Oumeraci [12] we distinguish between relative impact magnitudes corresponding to breaking wave loads () and impact magnitudes corresponding to impact wave loads ().
3.3. Equivalent-Static Wave Loads for the GT-Sliding Experiments
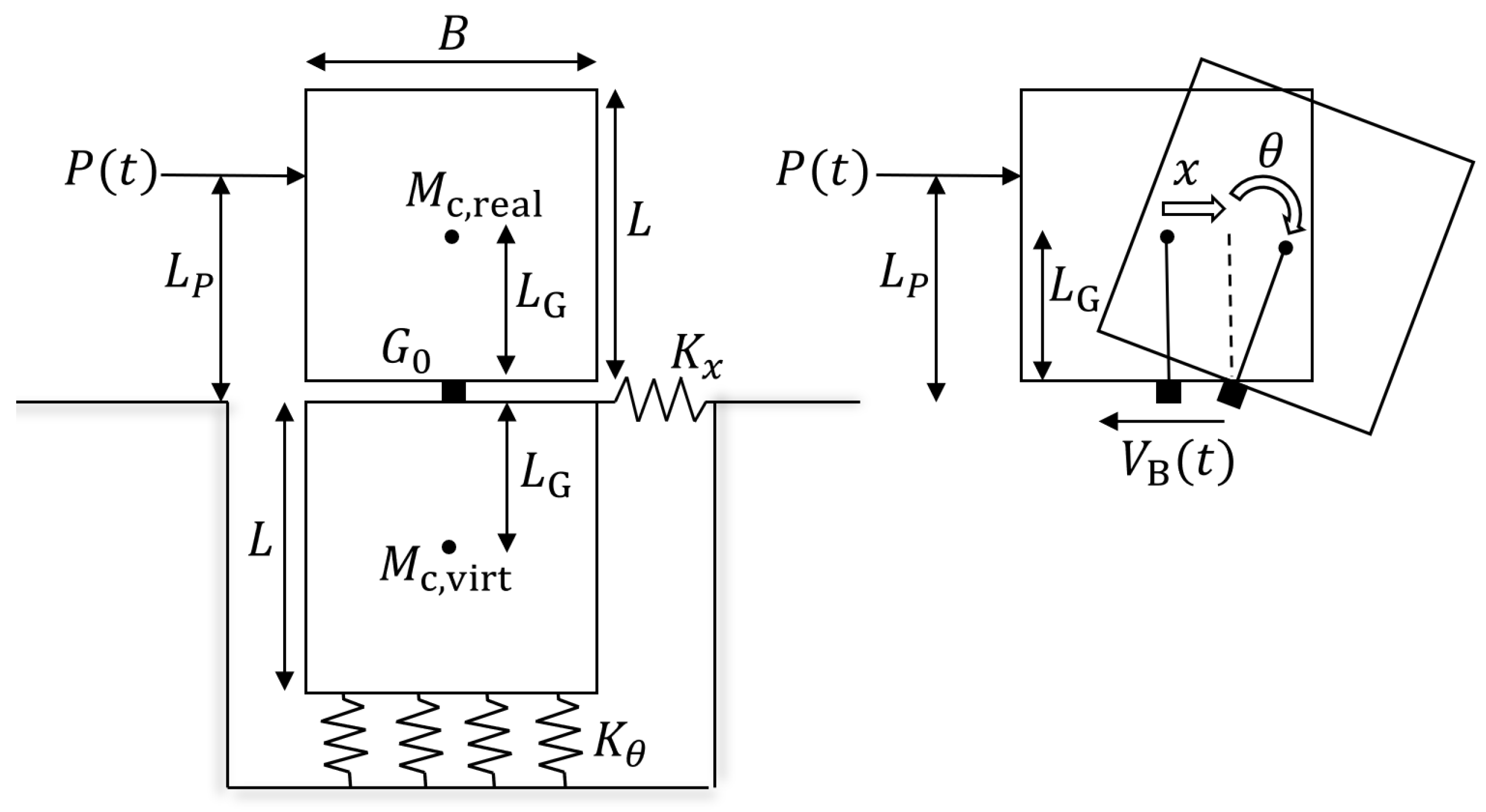
3.3.1. Analytic Dynamic Model
3.3.2. Input-Parameters
- Relative caisson width (): The exact geometric characteristics of the caisson structures in scope of the GT-sliding experiments are unknown. The dimensions of the real-life caisson structures analyzed by Goda [28] in step (4) of Section 2.5.2 were however between . A sensitivity study showed that within this range the exact value of had little influence on the dynamic response. In this study, therefore the value of is adopted, for reasons that this value was also taken in Goda [26].
- Relative caisson center of gravity (): Caisson structures are often designed as rectangular concrete boxes filled with (more or less) homogeneous soil. A reasonable value for the relative center of gravity therefore seems . Small deviations from this value were found to have little influence on the results and were not further investigated. The value was also taken in Goda [26].
- Ratio rotational and horizontal period of vibration (): The ratio between the rotational and horizontal period of vibration is captured by Equations (11) and (15) and can be expressed by:Since the values for the relative caisson width () and relative center of gravity () are known, the ratio depends on the choice for only. It is unknown what soil properties were used during the GT-sliding experiments. Goda [26] adopted the value , which is adopted in this study as well. Substituting the chosen values for , and into Equation (16) leads to the fixed ratio . This means that the horizontal and rotational degree of freedom vibrate in more or less the same natural period.
- Natural period of horizontal vibration (): According to Allsop et al. [8] the caissons in scope of Goda’s original wave load formula had natural periods between 0.1 and 0.3 s. It is not mentioned to which degree of freedom these natural periods correspond to. Since both degrees of freedom were found to vibrate in more or less the same period (), the exact choice is of minor importance and the horizontal degree of freedom x was taken.
3.3.3. Equivalent-Static Wave Loads for Base Shear
3.4. Analytic Dynamic Models for Slender Hydraulic Structures
3.4.1. Analytic Dynamic Model
3.4.2. Equivalent-Static Wave Loads for Reaction Force R
3.4.3. Considered Natural Periods
4. Results
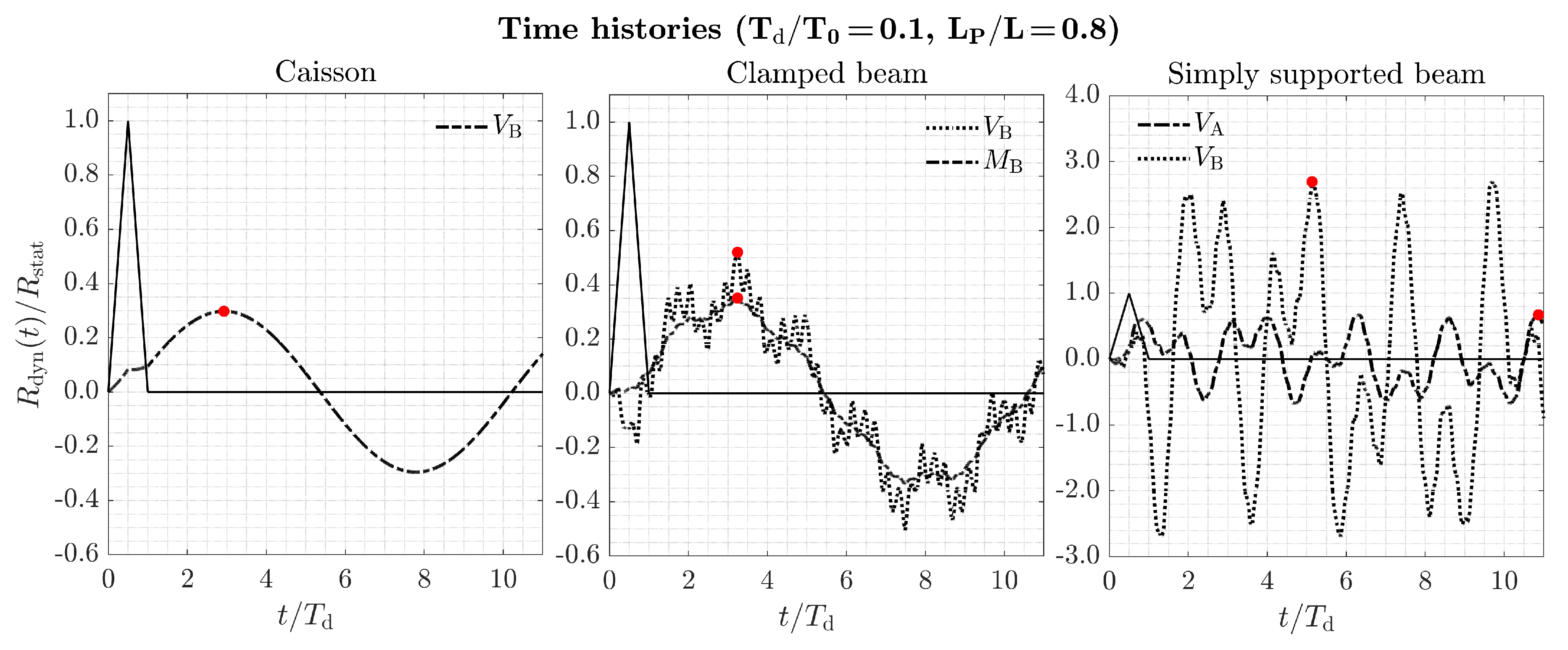
4.1. Time-Histories of Reaction Forces for Representative (Church-Roof) Design Situation
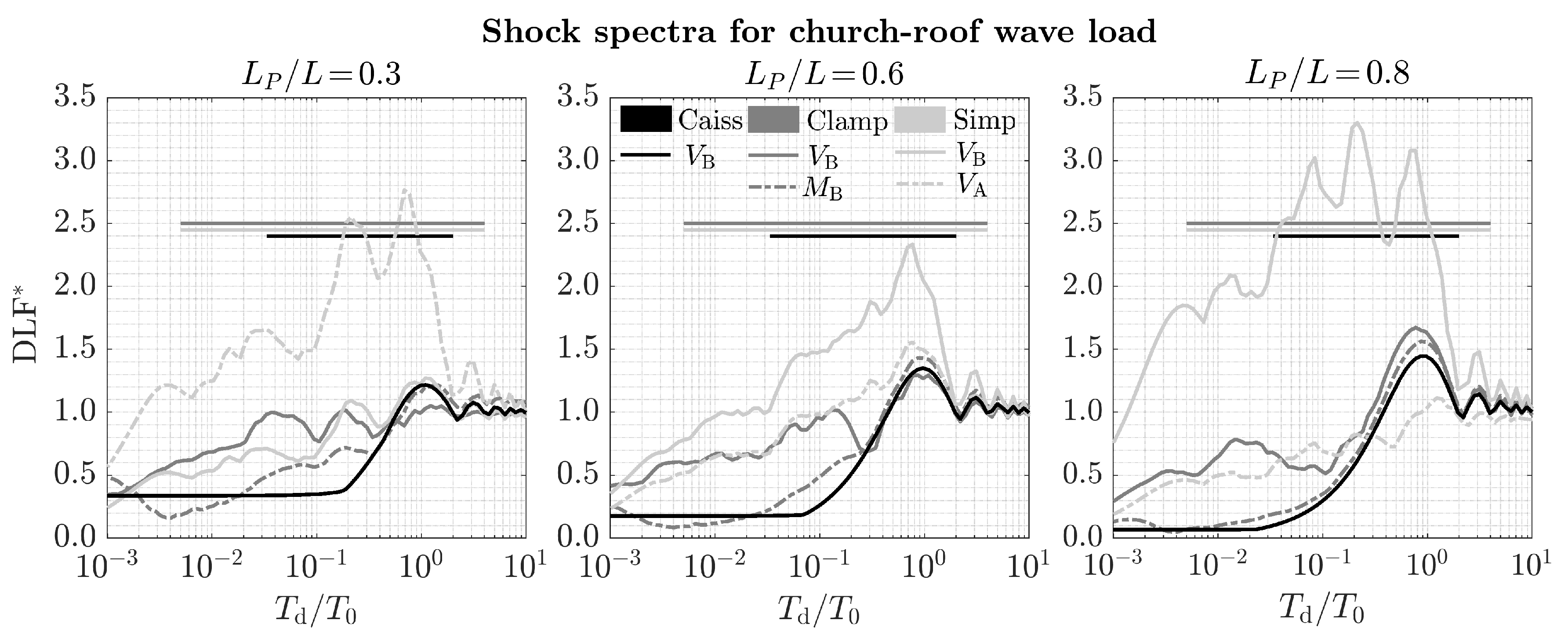
4.2. Dynamic Load Factors for All Other Design Situations (Shock-Spectra)
4.3. Investigation of the GT-Deviation
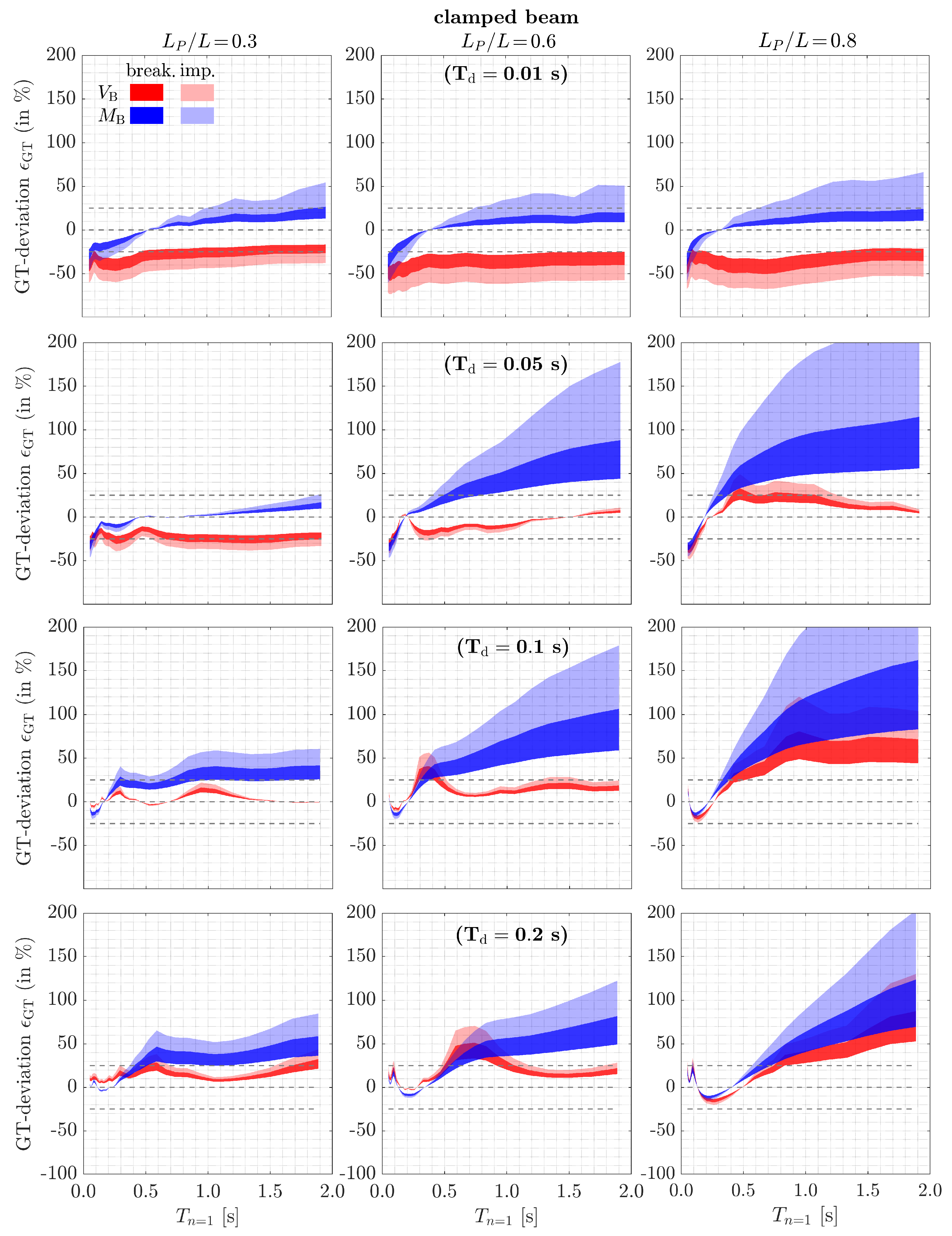
4.3.1. GT-Deviations for the Clamped Beam
4.3.2. GT-Deviations for the Simply Supported Beam
5. Discussion
5.1. Comparison of Model Uncertainties
5.1.1. Model Uncertainties Related to Lack of Knowledge and Deliberate Simplifications-Type (a) and (b)
5.1.2. Model Uncertainties Related to Differences in Dynamic Behavior-Type (c)
5.1.3. Total Uncertainties-Type (a), (b), and (c)
5.1.4. Model Uncertainties in Probabilistic Assessments
5.2. Practical Recommendations for the Assessment of Individual Structures
5.3. Final Remark
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tieleman, O.; Tsouvalas, A.; Hofland, B.; Peng, Y.; Jonkman, S. A three dimensional semi-analytical model for the prediction of gate vibrations immersed in fluid. Mar. Struct. 2019, 65, 134–153. [Google Scholar] [CrossRef]
- Brusewicz, K.; Wersocki, W.; Jankowski, R. Modal Analysis of a Steel Radial Gate Exposed to Different Water Levels. Arch. -Hydro-Eng. Environ. Mech. 2017, 64, 37–47. [Google Scholar] [CrossRef]
- Goda, Y. Random Seas and Design of Maritime Structures, 3rd ed.; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2009. [Google Scholar]
- Technische Adviescommissie voor de Waterkeringen (TAW). Leidraad Kunstwerken; TAW: Delft, The Netherlands, 2003. [Google Scholar]
- US Army Corps of Engineers. Coastal Engineering Manual; US Army Corps of Engineers: Washington, DC, USA, 2002; Volume 1110. [Google Scholar]
- van Bree, B.; Delhez, R.; Jongejan, R.; Casteleijn, A. Werkwijzer Ontwerpen Waterkerende Kunstwerken-Ontwerpverificaties Voor de Hoogwatersituatie. Groene Versie; Technical Report; Rijkswaterstaat-Water, Verkeer en Leefomgeving Waterkeringen: Utrecht, The Netherlands, 2018. (In Dutch) [Google Scholar]
- Delhez, R.; van Bree, B. WTI 2017 Toetsregels Kunstwerken. Toetsspoorrapport Sterkte en Stabiliteit Puntconstructies; Technical Report 1220087-004-GEO-0007; Deltares: Delft, The Netherlands, 2015. (In Dutch) [Google Scholar]
- Allsop, N.W.H.; Vicinanza, D.; McKenna, J.E. Wave Forces on Vertical and Composite Breakwaters; Technical Report SR 443; HR Wallingford: Wallingford, UK, 1996; Available online: https://eprints.hrwallingford.com/1/ (accessed on 6 January 2020).
- Castellino, M.; Sammarco, P.; Romano, A.; Martinelli, L.; Ruol, P.; Franco, L.; De Girolamo, P. Large impulsive forces on recurved parapets under non-breaking waves. A numerical study. Coast. Eng. 2018, 136, 1–15. [Google Scholar] [CrossRef]
- de Almeida, E.; Hofland, B. Validation of pressure-impulse theory for standing wave impact loading on vertical hydraulic structures with short overhangs. Coast. Eng. 2020, 159, 103702. [Google Scholar] [CrossRef]
- Kamikubo, K.; Yamamoto, Y.; Sugawara, K.; Kimura, K.; Shimizu, T. Experimental Study on Damage to Wave Splash Barrier for a Coastal Road. J. Jpn. Soc. Civ. Eng. Ser. Coast. Eng. 2009, 65, 821–825. [Google Scholar] [CrossRef]
- Kortenhaus, A.; Oumeraci, H. Classification of wave loading on monolithic coastal structures. Proc. Coast. Eng. Conf. 1998, 1, 867–880. [Google Scholar]
- Holthuijsen, L. Waves in Oceanic and Coastal Waters; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Kolkman, P.; Jongeling, T. Dynamic Behaviour of Hydraulic Structures. Part B: Structures in Waves; Technical Report; WL Delft Hydraulics Publication: Delft, The Netherlands, 2007. [Google Scholar]
- Chen, X.; Hofland, B.; Molenaar, W.; Capel, A.; Gent, M.R.V. Use of impulses to determine the reaction force of a hydraulic structure with an overhang due to wave impact. Coast. Eng. 2019, 147, 75–88. [Google Scholar] [CrossRef]
- Cuomo, G.; Piscopia, R.; Allsop, W. Evaluation of wave impact loads on caisson breakwaters based on joint probability of impact maxima and rise times. Coast. Eng. 2010, 58, 9–27. [Google Scholar] [CrossRef]
- Cuomo, G.; Lupoi, G.; Shimosako, K.; Takahashi, S. Dynamic response and sliding distance of composite breakwaters under breaking and non-breaking wave attack. Coast. Eng. 2011, 58, 953–969. [Google Scholar] [CrossRef]
- Breteler, M.K. Praktijkproeven Op Glaswand in Waterkering van Neer en Golfoverslagproeven; Technical Report ENW-T-20-11; Deltares: Delft, The Netherlands, 2020. (In Dutch) [Google Scholar]
- Tuin, H.; Voortman, H.; Wijdenes, T.; Van der Stelt, W.; Van Goolen, D.; Van Lierop, P.; Lous, L.; Kortlever, W. Spectral analysis of wave forces for the design of rolling gates of the lock of Amsterdam. In Proceedings of PIANC-World Congress Panama City; PIANC: Brussels, Belgium, 2018. [Google Scholar]
- Visser, T. Ontwerpnota Stormvloedkering Oosterschelde. Boek 4: De Sluitingsmiddelen; Technical Report; Rijkswaterstaat, Deltadienst: The Hague, The Netherlands, 2003. [Google Scholar]
- Loginov, V. Dynamic analysis of the stability of harbour protective structures under the action of wave impacts. Tr. SNIIMF 1958, 19, 58–68. [Google Scholar]
- Hayashi, T. Virtual mass and the damping factor of the breakwater during rocking, and the modification by their effect on the expression of the thrusts exerted upon breakwater by the action of breaking waves. Coast. Eng. Jpn. 1965, 8, 105–117. [Google Scholar] [CrossRef]
- Ito, Y.; Fujishima, M.; Kitatani, T. On the Stability of Breakwaters; Technical Report PARI Report 005-14; Port and Airport Research Institute: Yokosuka, Japan, 1966. (In Japanese) [Google Scholar]
- Moroz, L.; Smirnov, G. Dynamic analysis of vertical structures. Sb. Tr. MISI 1970, 78, 4–17. (In Russian) [Google Scholar]
- Oumeraci, H.; Kortenhaus, A. Analysis of the dynamic response of caisson breakwaters. Coast. Eng. 1994, 22, 159–183. [Google Scholar] [CrossRef]
- Goda, Y. Dynamic response of upright breakwaters to impulsive breaking wave forces. Coast. Eng. 1994, 22, 135–158. [Google Scholar] [CrossRef]
- Goda, Y. A new method of wave pressure calculation for the design of composite breakwater. Rept. Port Habour Res. Inst. 1973, 12, 31–70. (In Japanese) [Google Scholar]
- Goda, Y. A new method of wave pressure calculation for the design of composite breakwater. In Proceedings of the 14th Conference on Coastal Engineering, Copenhagen, Denmark, 24–28 June 1974; ASCE: Reston, VA, USA; pp. 1702–1720. [Google Scholar]
- Tanimoto, K.; Moto, K.; Ishizuka, S.; Goda, Y. An investigation on design wave formulae of composite-type breakwaters. In Proceedings of the 23rd Conference Coastal Engineering, Honolulu, HI, USA, 11–17 July 1976; pp. 11–16. (In Japanese). [Google Scholar]
- Takahashi, S.; Shimasako, K.; Sasaki, H. Experimental study on wave forced acting on perforated wall caisson breakwaters. Rept. Port Habour Res. Inst. 1991, 30, 3–34. (In Japanese) [Google Scholar]
- Takahashi, S.; Shimosaka, K. Wave pressure on a perforated wall. In Proceedings of the International Conference on Hydro-Technical Engineering for Port and Harbor Construction, Yokosuka, Japan, 19–21 October 1994. [Google Scholar]
- Takahashi, S.; Tanimoto, K.; Shimosako, K. Experimental Study of Impulsive Pressures on Composite Breakwaters-Fundamental Feature of Impulsive Pressure and the Impulsive Pressure Coefficient; Technical Report PARI Report 031-05-02; Port and Harbour Institute, Ministry of Transport: Yokosuka, Japan, 1993.
- Takahashi, S.; Tanimoto, K.; Shimosako, K. A Proposal of Impulsive Pressure Coefficient for the Design of Composite Breakwaters. In Hydro-port’94, Proceedings of the International Conference on Hydro-Technical Engineering for Port and Harbor Construction, Yokosuka, Japan, 19–21 October 1994; Port and Harbour Research Institute: Yokosuka, Japan, 1994; pp. 489–504. [Google Scholar]
- Goda, Y.; Fukumori, T. Laboratory investigation of wave pressures exerted upon vertical and composite walls. Rept. Port Habour Res. Inst. 1972, 11, 3–45. (In Japanese) [Google Scholar]
- Goda, Y. Experiments on the transition from nonbreaking to post breaking wave pressures. Coast. Eng. Jpn. 1972, 15, 81–90. [Google Scholar] [CrossRef]
- Goda, Y.; Kakizaki, S. Study on finite anplitude standing waves and their pressurs upon a vertical wall. Coast. Eng. Jpn. 1967, 10, 1–11. [Google Scholar] [CrossRef]
- Takahashi, S. Design of Vertical Breakwaters; Technical Report; Port and Airport Research Institute Japan: Yokosuka, Japan, 1996. [Google Scholar]
- Goda, Y. Motion of composite breakwater on elastic foundation under the action of impulsive breaking wave pressure. Rept. Port Habour Res. Inst. 1973, 12, 3–29. (In Japanese) [Google Scholar]
- Tanimoto, K.; Takahashi, S.; Kitatani, T. Experimental study of impact breaking wave forces on a vertical wall-caisson of composite breakwater. Rept. Port Habour Res. Inst. 1981, 20, 3–39. (In Japanese) [Google Scholar]
- Ditlevsen, O. Model uncertainty in structural reliability. Struct. Saf. 1982, 1, 73–86. [Google Scholar] [CrossRef]
- Hofland, B.; Kaminski, M.; Wolters, G. Large Scale Wave Impacts on a Vertical Wall; Smith, J.M., Lynett, P., Eds.; Coastal Engineering Proceedings No 32 (2010); Coastal Engineering, 2011; Available online: https://journals.tdl.org/icce/index.php/icce/about/contact (accessed on 6 January 2020).
- Cuomo, G.; Allsop, W.; Bruce, T.; Pearson, J. Breaking wave loads at vertical seawalls and breakwaters. Coast. Eng. 2010, 57, 424–439. [Google Scholar] [CrossRef]
- El Baroudi, A.; Razafimahery, F. Transverse vibration analysis of Euler-Bernoulli beam carrying point masse submerged in fluid media. Int. J. Eng. Technol. 2015, 4, 369–380. [Google Scholar] [CrossRef]
- Spijkers, J.M.J.; Vrouwenvelder, A.C.W.M.; Klaver, E.C. Structural Dynamics CT4140-Part 1 Structural Vibrations; Lecture Notes; Delft University of Technology, Faculty of Civil Engineering and Geosciences: Delft, The Netherlands, 2005. [Google Scholar]
- Van der Meer, J.; Juhl, J.; Van Driel, G. Probabilistic Calculations of Wave Forces on Vertical Structures. In MAST G6-S Coastal Structures, Proceedings of the Final Overall Workshop, Lisbon, Portugal, 5–6 November 1992; Allsop, N.W.H., Ed.; HR Wallingford: Wallingford, UK, 1992. [Google Scholar]
- Van der Meer, J.W.; d’Angremond, K.; Juhl, J. Probabilistic calculations of wave forces on vertical structures. Coast. Eng. 1994, 1994, 1754–1767. [Google Scholar]
- Bruining, J. Wave forces on Vertical Breakwaters. Reliability of Design Formula. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 1994. [Google Scholar]
- Hou, H.S.; Chiou, Y.D.; Chien, C.H. Experimental Study and Theoretical Comparison of Irregular Wave Pressures on Deepwater Composite Breakwaters. In Proceedings of the 16th Conference on Ocean Engineering, Yokosuka, Japan, 19–21 October 1994. [Google Scholar]
- Gurhan, G.; Unsalan, D. A comparative study of the first and second order theories and Goda’s formula for wave-induced pressure on a vertical breakwater with irregular waves. Ocean Eng. 2005, 32, 2182–2194. [Google Scholar] [CrossRef]
- Davenport, A. On the assessment of the reliability of wind loading on low buildings. J. Wind. Eng. Ind. Aerodyn. 1983, 11, 21–37. [Google Scholar] [CrossRef]
- van Maris, B. Wave Loads on Vertical Walls-Validation of Design Methods for non-Breaking Waves of Bimodal Spectra. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value (s) |
|---|---|---|
| Investigated wave loads | ||
| relative moment-arm wave load | 0.3, 0.6, 0.8 | |
| impact loading duration | 0.01–0.2 s | |
| relative rise time | 0.5 | |
| relative impulsive magnitude | ||
| - (slightly) breaking wave loads | 1–2.5 | |
| - impact wave loads | 2.5-10 | |
| Caisson structures (proxy for GT caissons) | ||
| relative caisson width | 1.25 | |
| relative center of gravity | 0.5 | |
| ratio horizontal and rotational period of vibration | 0.94 | |
| range of horizontal period of vibration | 0.1–0.3 s * | |
| Slender hydraulic structures | ||
| range of first modal period of vibration | 0.05–2 s |
| Clamped | Simply Supported | |
|---|---|---|
| modal frequency | , | |
| modal shape | ||
| with , |
| Reaction | |||
|---|---|---|---|
| horizontal | force | 0.83 | 0.30 |
| moment | 0.75 | 0.53 | |
| vertical | force | 0.71 | 0.35 |
| moment | 0.67 | 0.55 | |
| Pulsating Waves | Breaking Waves | Impact Waves | |||||
|---|---|---|---|---|---|---|---|
| Structure | Reaction | V | V | V | |||
| clamped | base shear () | - | - | 0.95 | 0.27 | 0.98 | 0.42 |
| base moment () | - | - | 0.75 | 0.26 | 0.67 | 0.26 | |
| simply supported | lower shear () | - | - | 1.44 | 0.38 | 1.66 | 0.55 |
| upper shear () | - | - | 1.18 | 0.40 | 1.30 | 0.55 | |
| Pulsating Waves | Breaking Waves | Impact Waves | |||||
|---|---|---|---|---|---|---|---|
| Structure | Reaction | V | V | V | |||
| clamped | base shear () | 0.83 | 0.30 | 0.79 | 0.41 | 0.81 | 0.53 |
| base moment () | 0.83 | 0.30 | 0.62 | 0.40 | 0.55 | 0.40 | |
| simply supported | lower shear () | 0.83 | 0.30 | 1.20 | 0.50 | 1.38 | 0.65 |
| upper shear () | 0.83 | 0.30 | 0.98 | 0.51 | 1.08 | 0.65 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meinen, N.E.; Steenbergen, R.D.J.M.; Hofland, B.; Jonkman, S.N. Applicability of the Goda–Takahashi Wave Load Formula for Vertical Slender Hydraulic Structures. J. Mar. Sci. Eng. 2020, 8, 868. https://doi.org/10.3390/jmse8110868
Meinen NE, Steenbergen RDJM, Hofland B, Jonkman SN. Applicability of the Goda–Takahashi Wave Load Formula for Vertical Slender Hydraulic Structures. Journal of Marine Science and Engineering. 2020; 8(11):868. https://doi.org/10.3390/jmse8110868
Chicago/Turabian StyleMeinen, Nadieh Elisabeth, Raphaël Daniël Johannes Maria Steenbergen, Bas Hofland, and Sebastiaan Nicolaas Jonkman. 2020. "Applicability of the Goda–Takahashi Wave Load Formula for Vertical Slender Hydraulic Structures" Journal of Marine Science and Engineering 8, no. 11: 868. https://doi.org/10.3390/jmse8110868
APA StyleMeinen, N. E., Steenbergen, R. D. J. M., Hofland, B., & Jonkman, S. N. (2020). Applicability of the Goda–Takahashi Wave Load Formula for Vertical Slender Hydraulic Structures. Journal of Marine Science and Engineering, 8(11), 868. https://doi.org/10.3390/jmse8110868