Numerical Simulation of Scour Depth and Scour Patterns in Front of Vertical-Wall Breakwaters Using OpenFOAM


Abstract
1. Introduction
2. Materials and Methods
2.1. Hydrodynamic Model on OpenFOAM Platform
2.1.1. Continuity and RANS Equations
2.1.2. Volume of Fluid (VOF) Equations
2.1.3. Turbulence Modelling
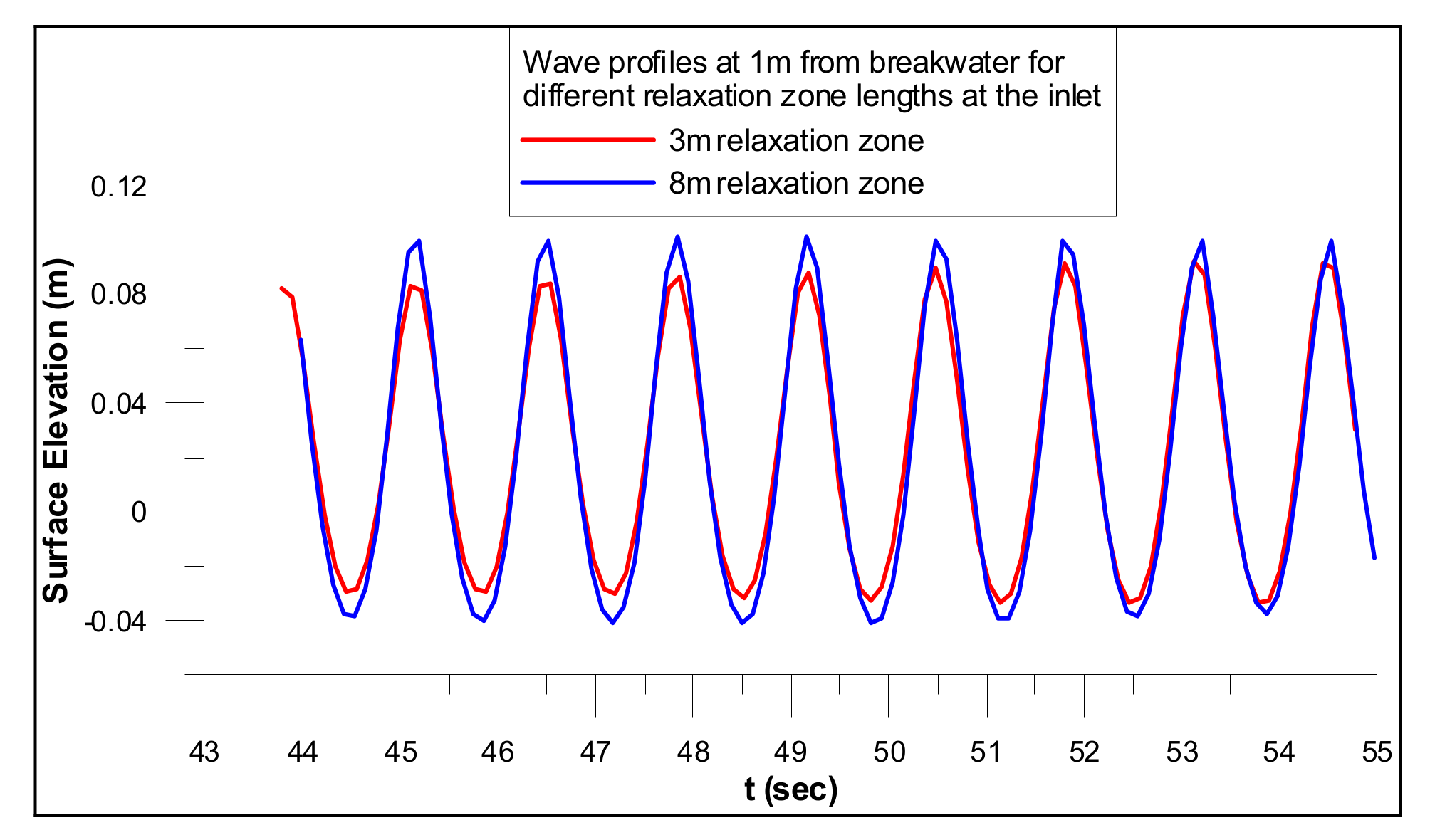
2.1.4. Wave Generation and Absorption
2.2. Morphodynamic Model
2.2.1. Bed Load and Sheet Flow
2.2.2. Suspended Load
2.2.3. Conservation of Sediment Transport
2.3. Coupling of the Two Models—Iterative Method
3. Results
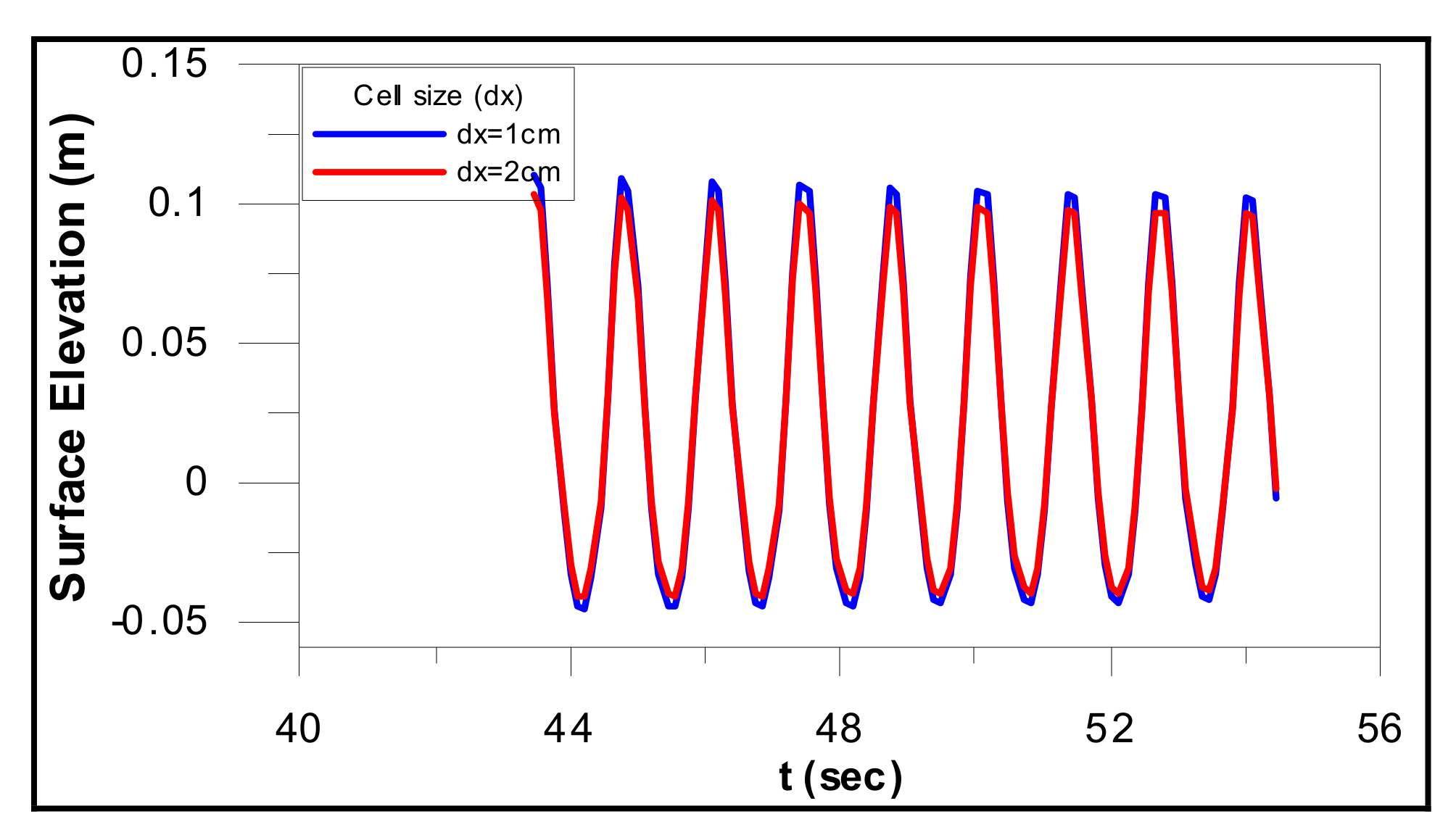
3.1. Geometry of the Model—Mesh Generation
3.2. Wave and Sediment Characteristics
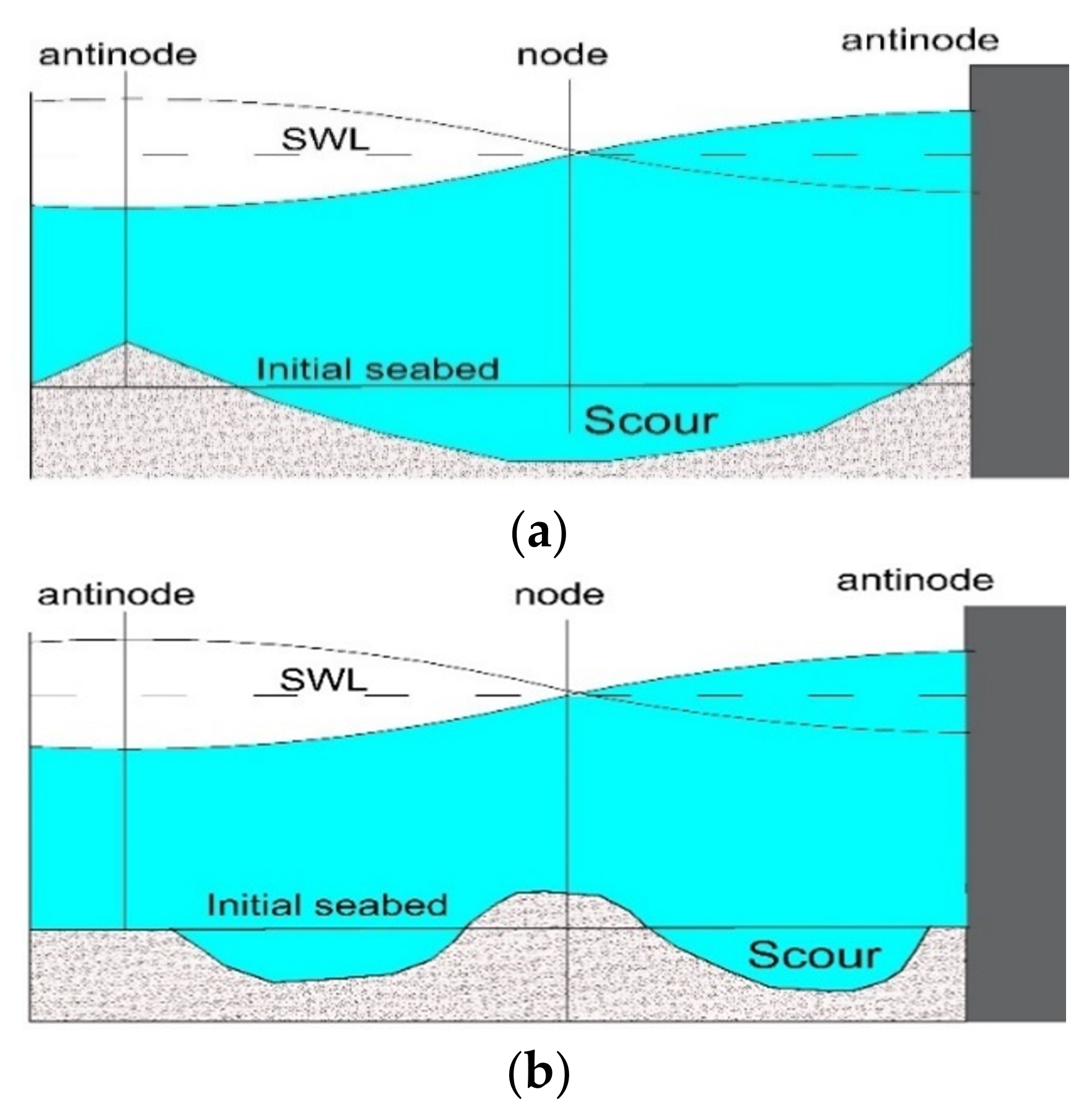
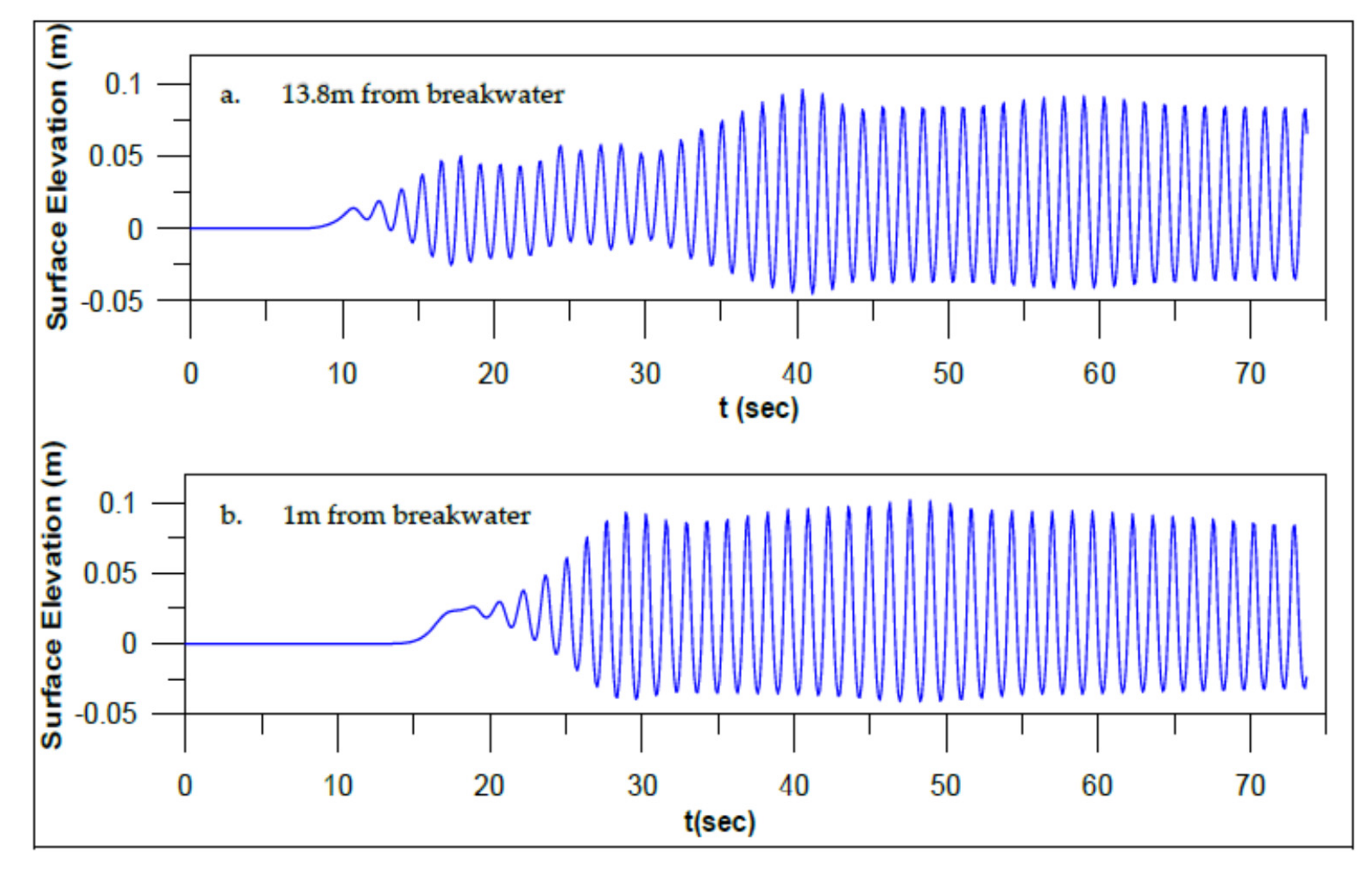
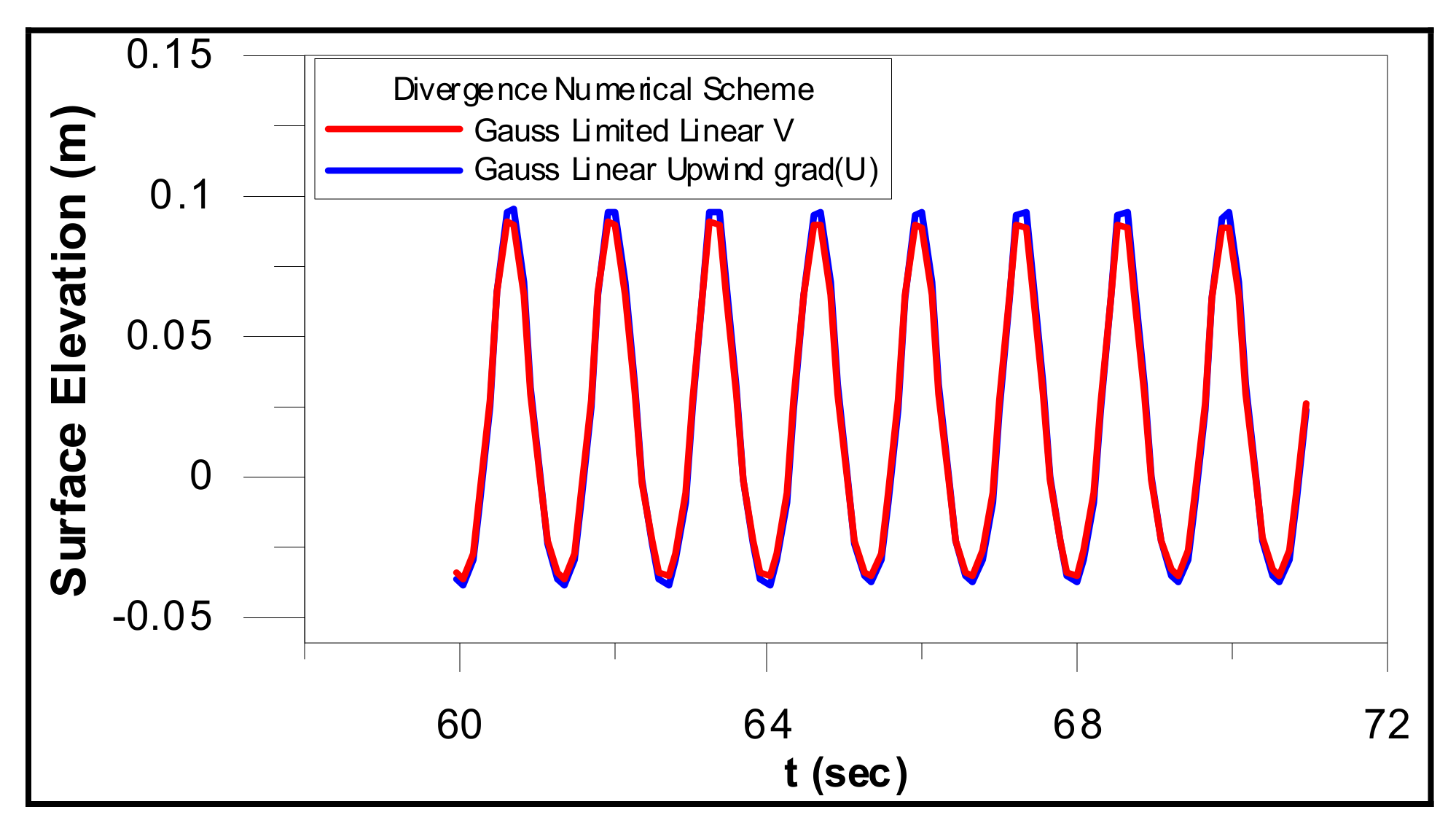
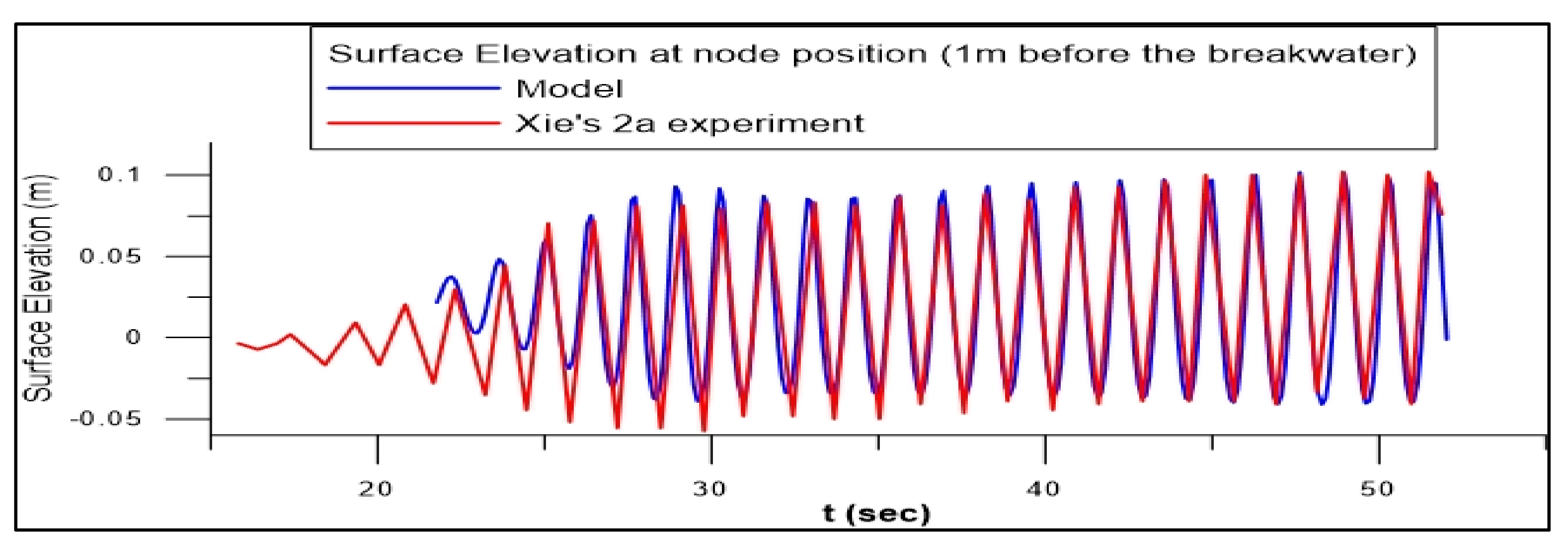
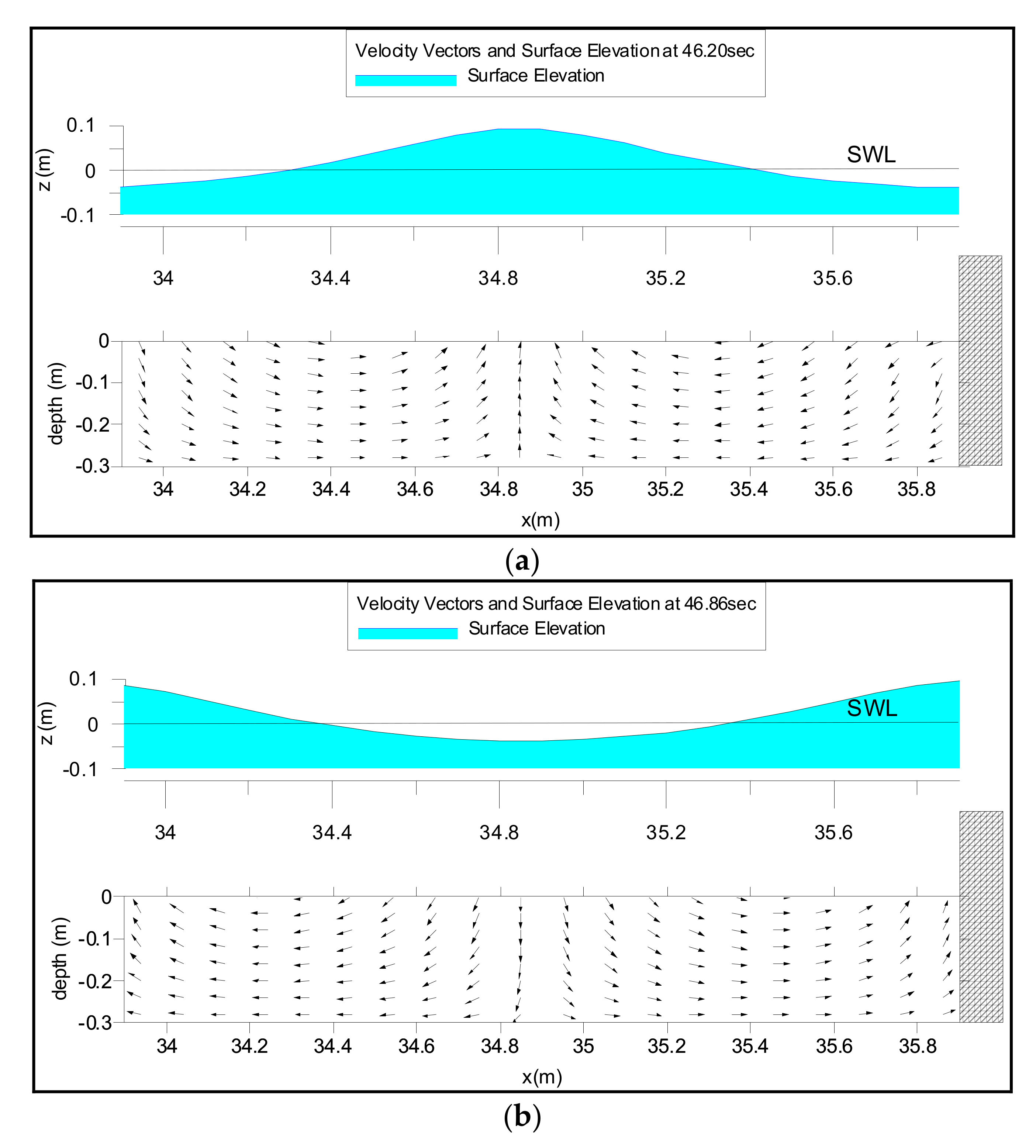
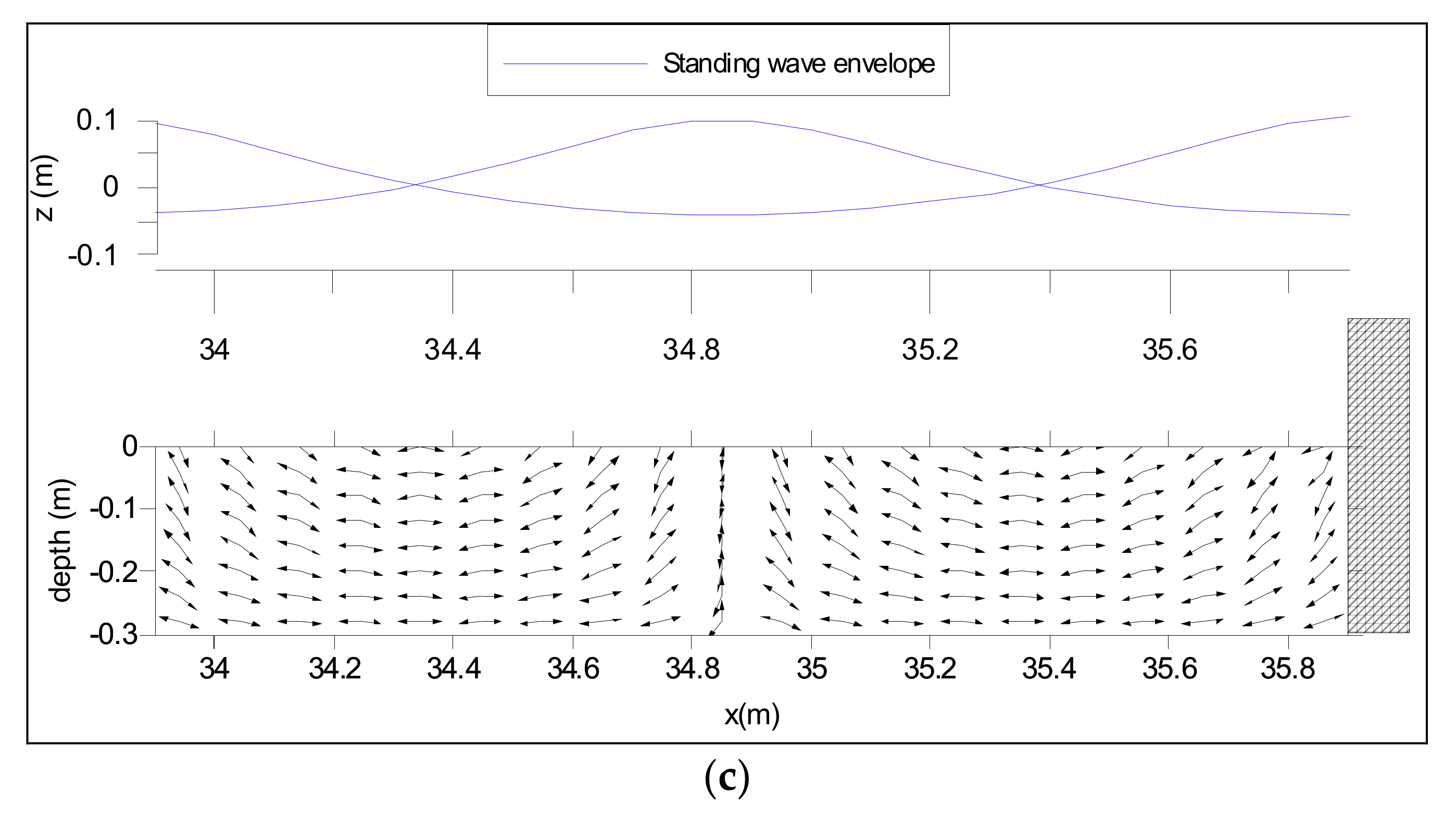
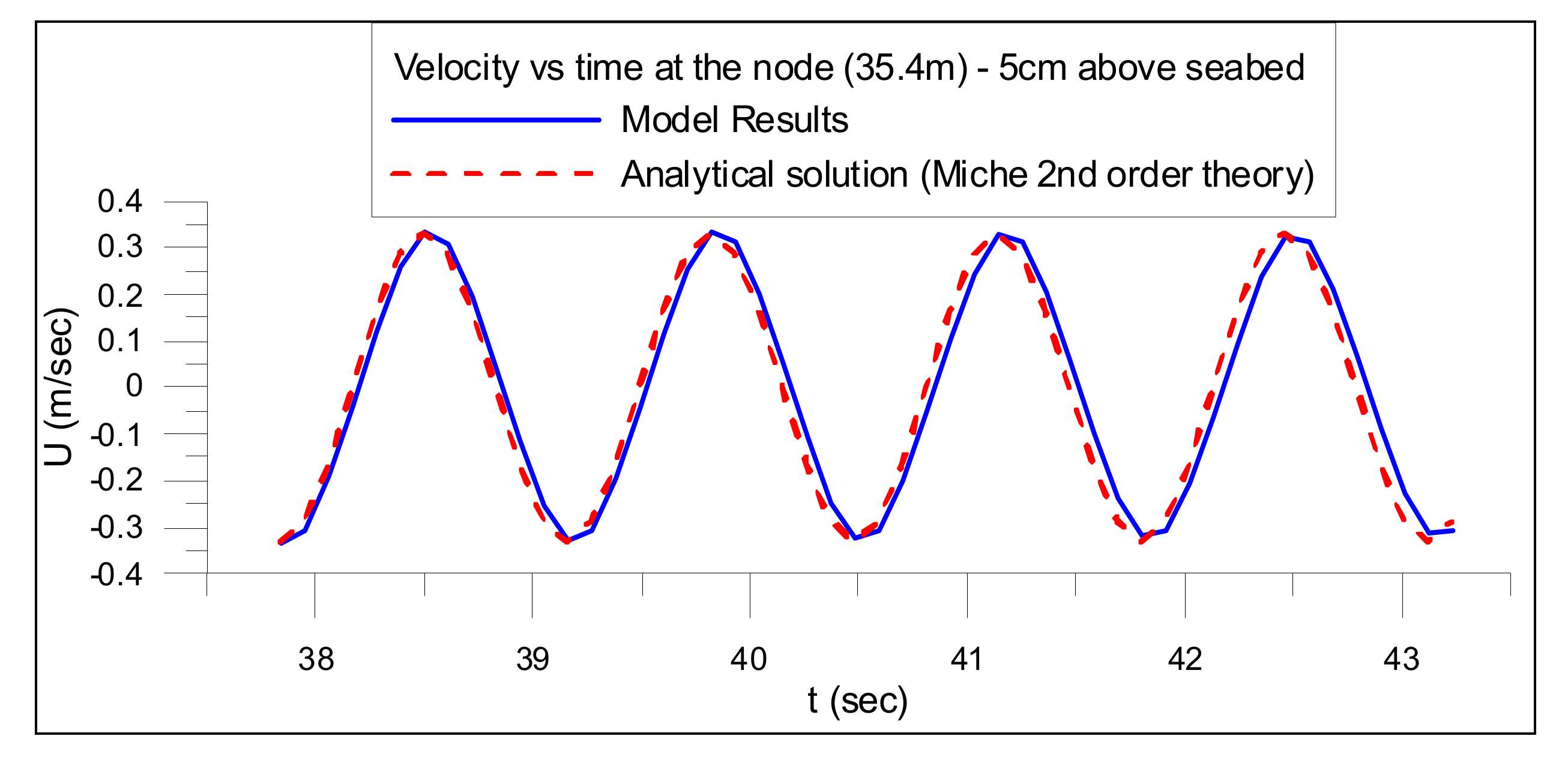
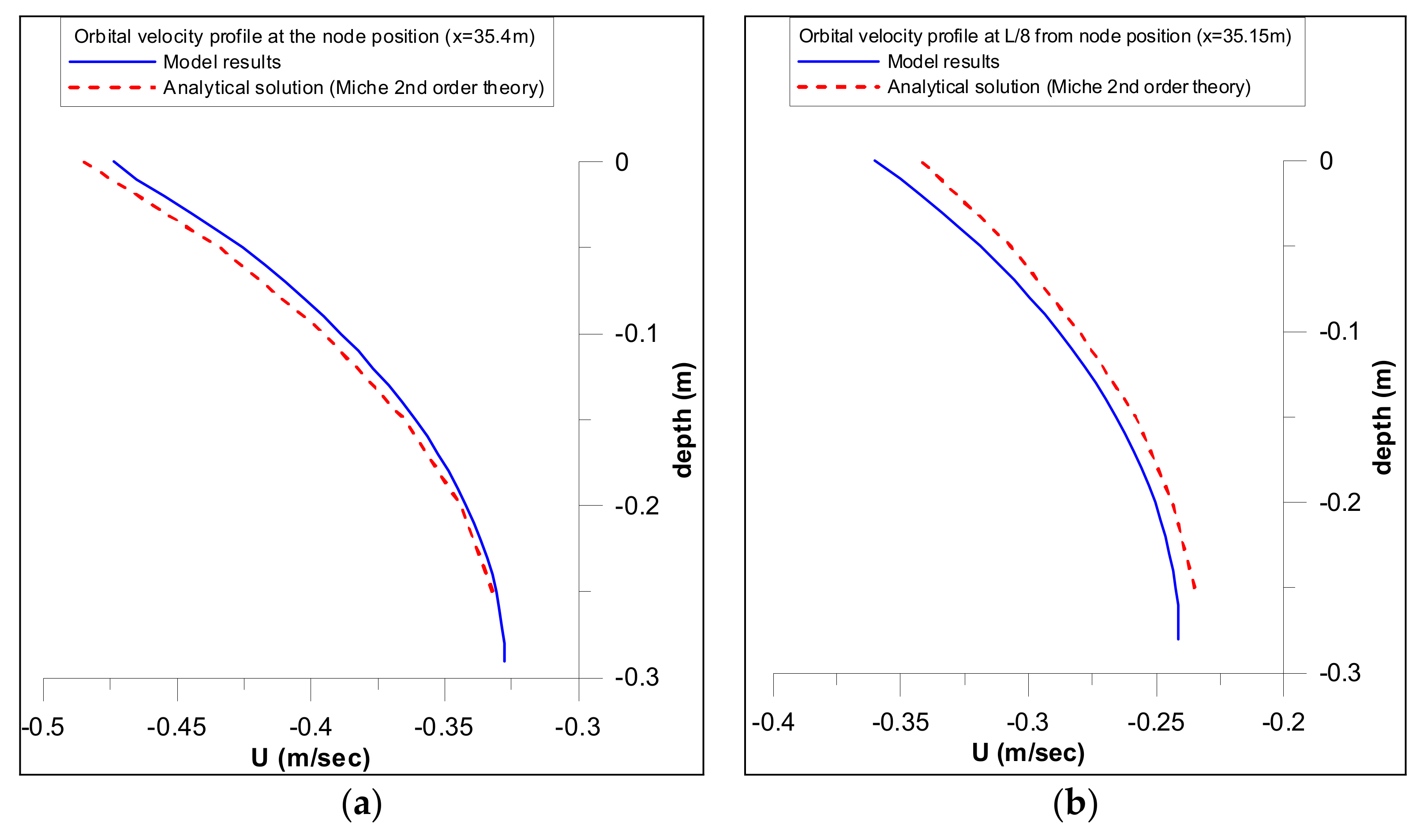
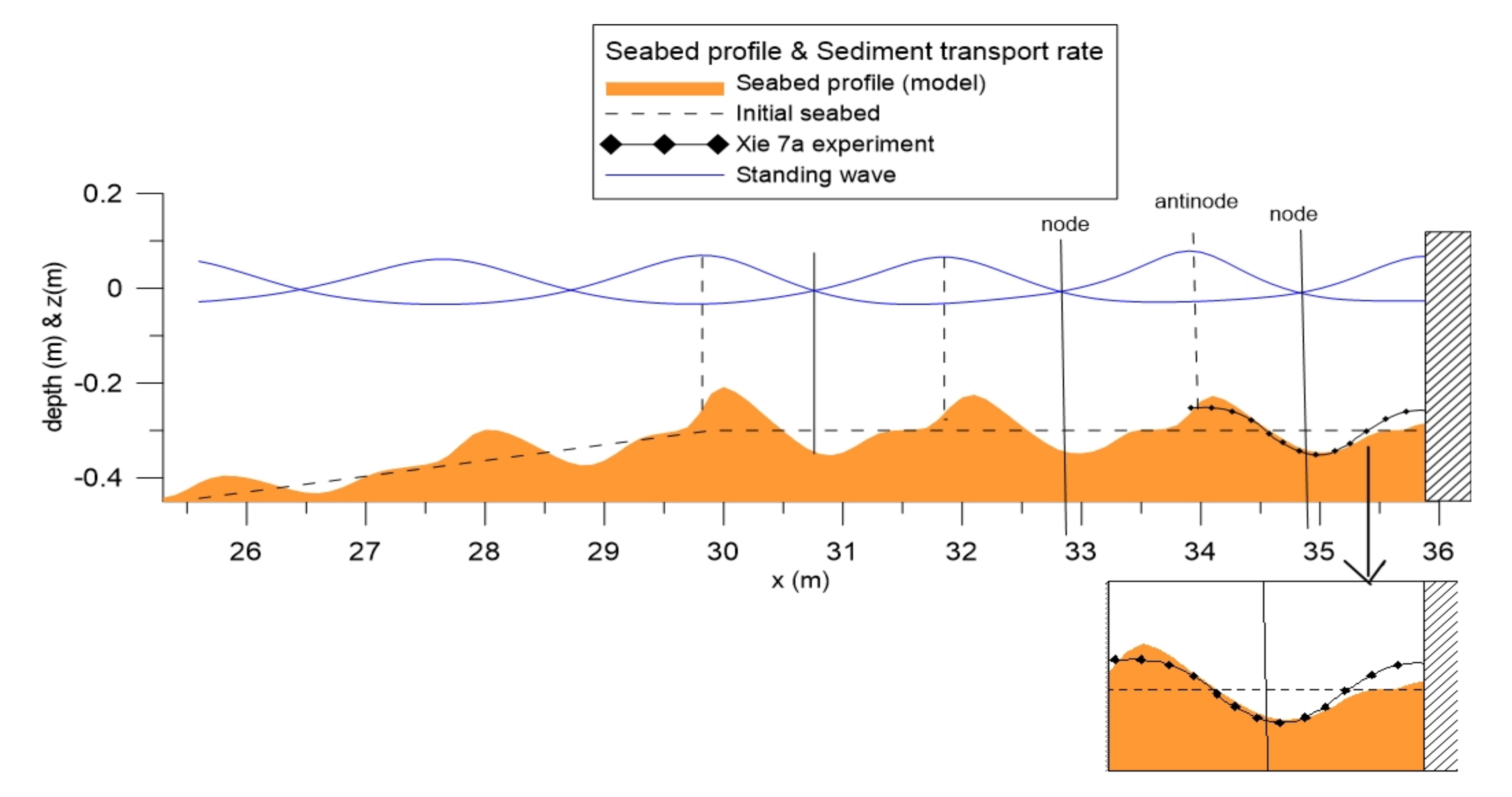
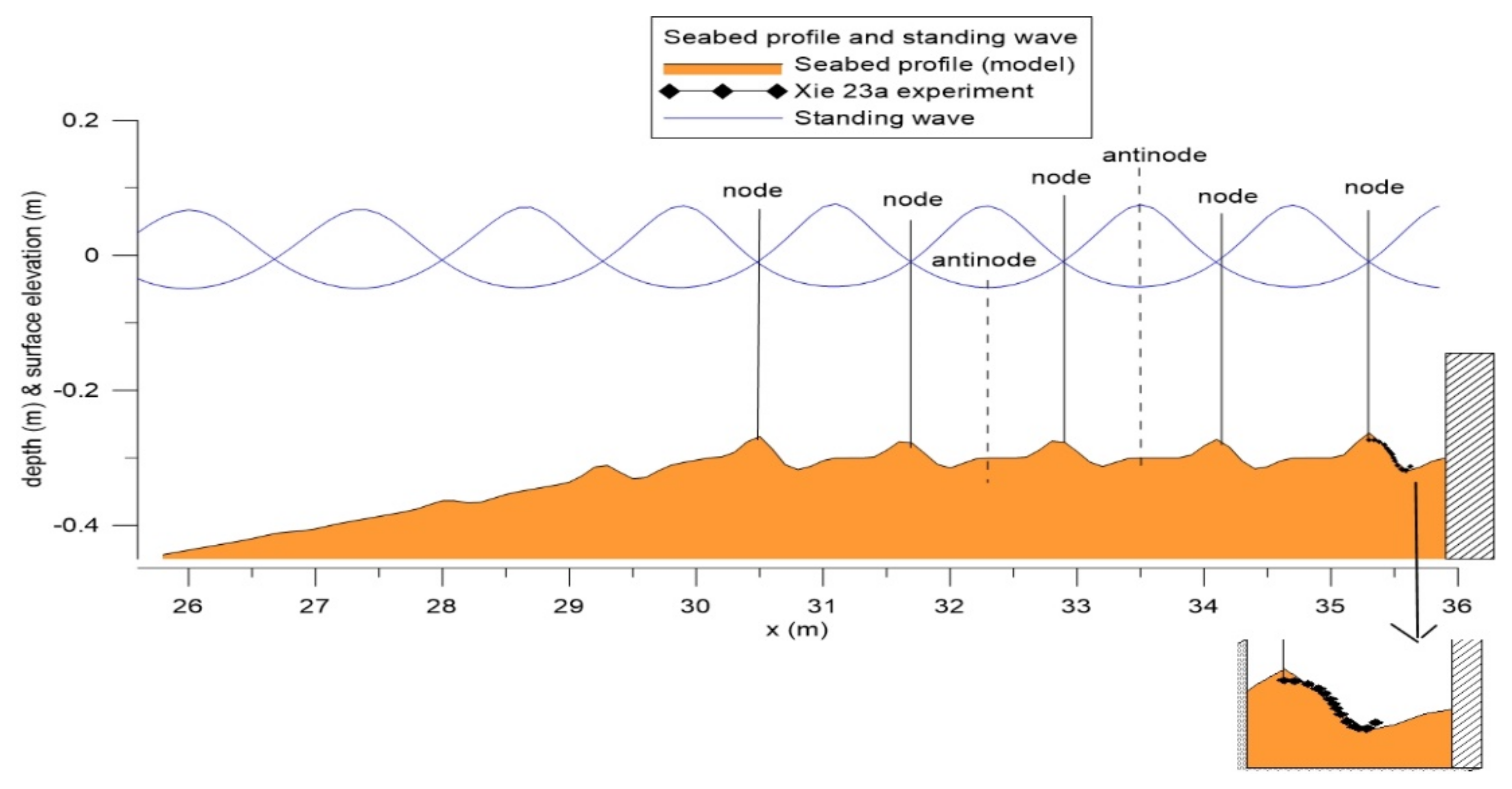
3.3. Hydrodynamic Results—Standing Wave Formation
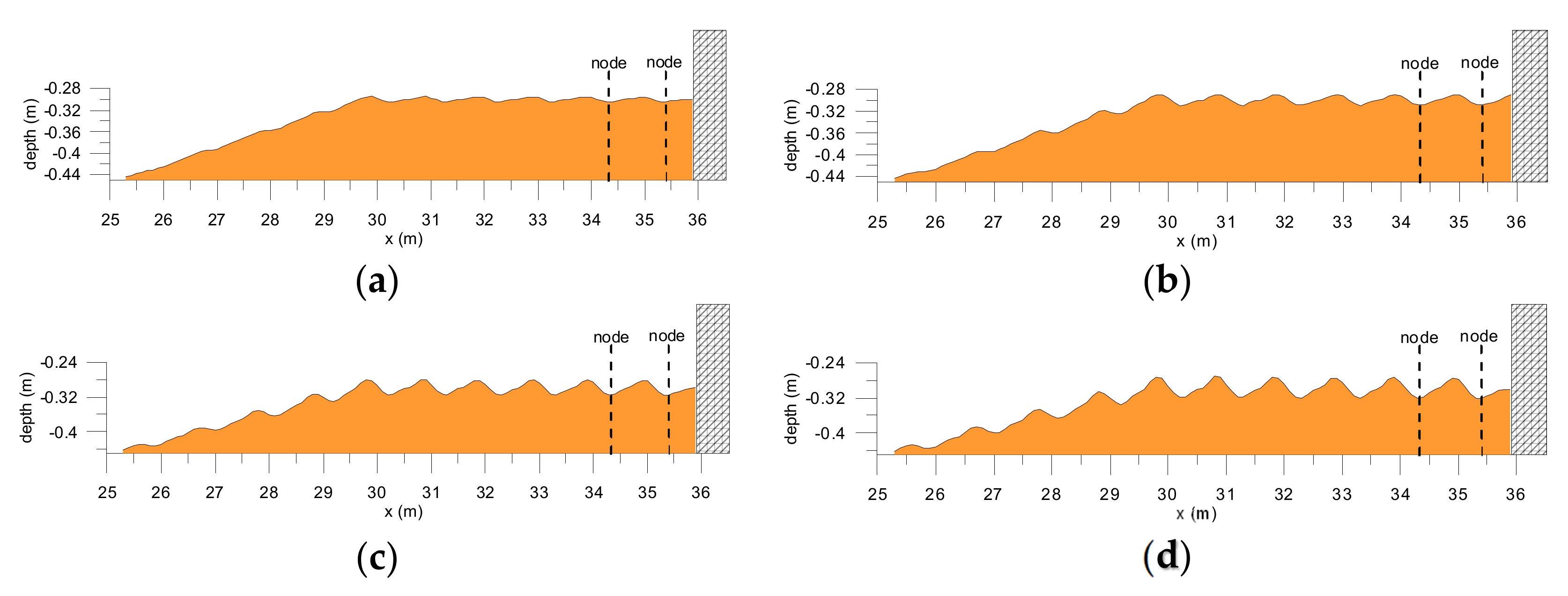
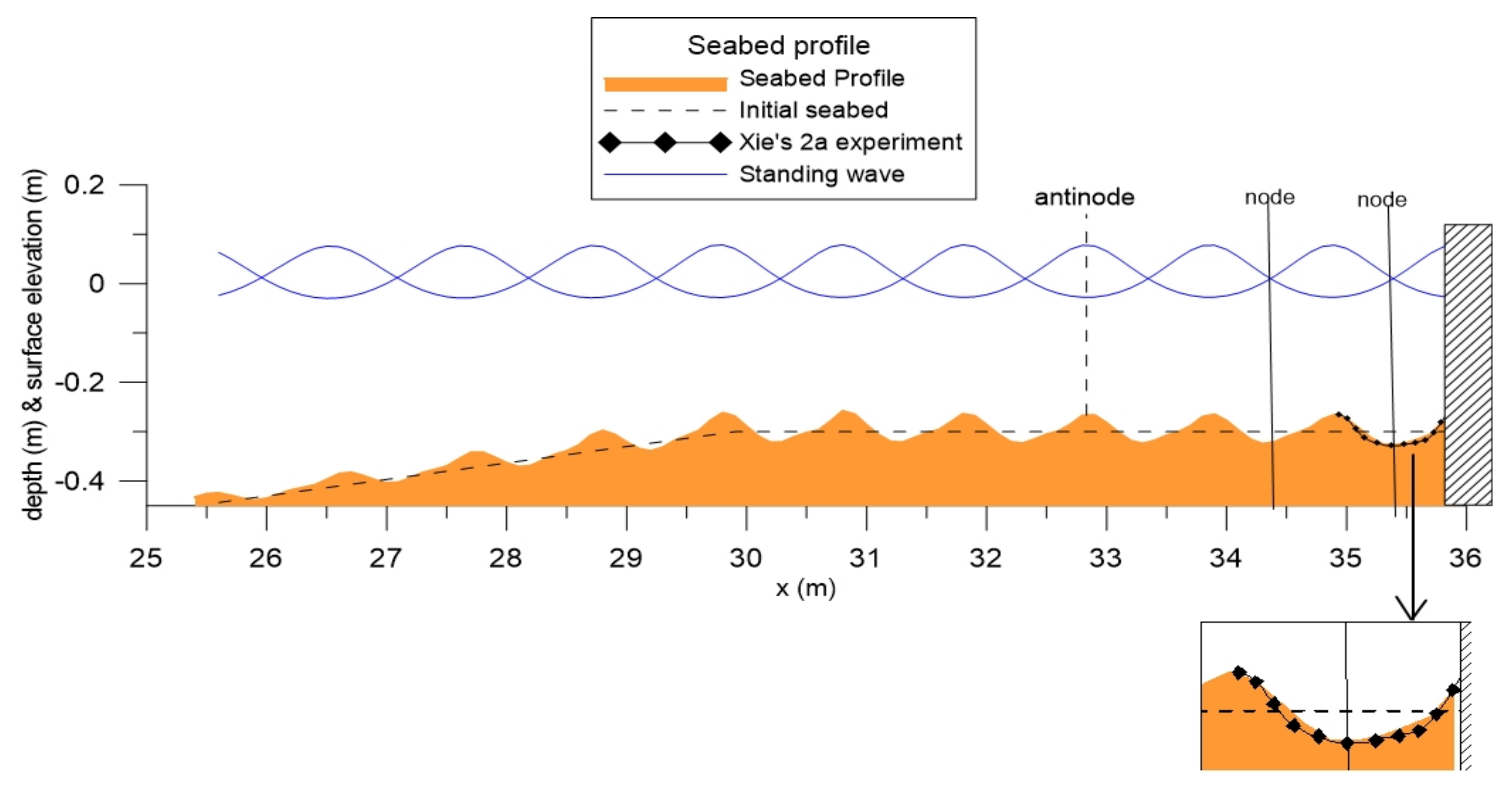
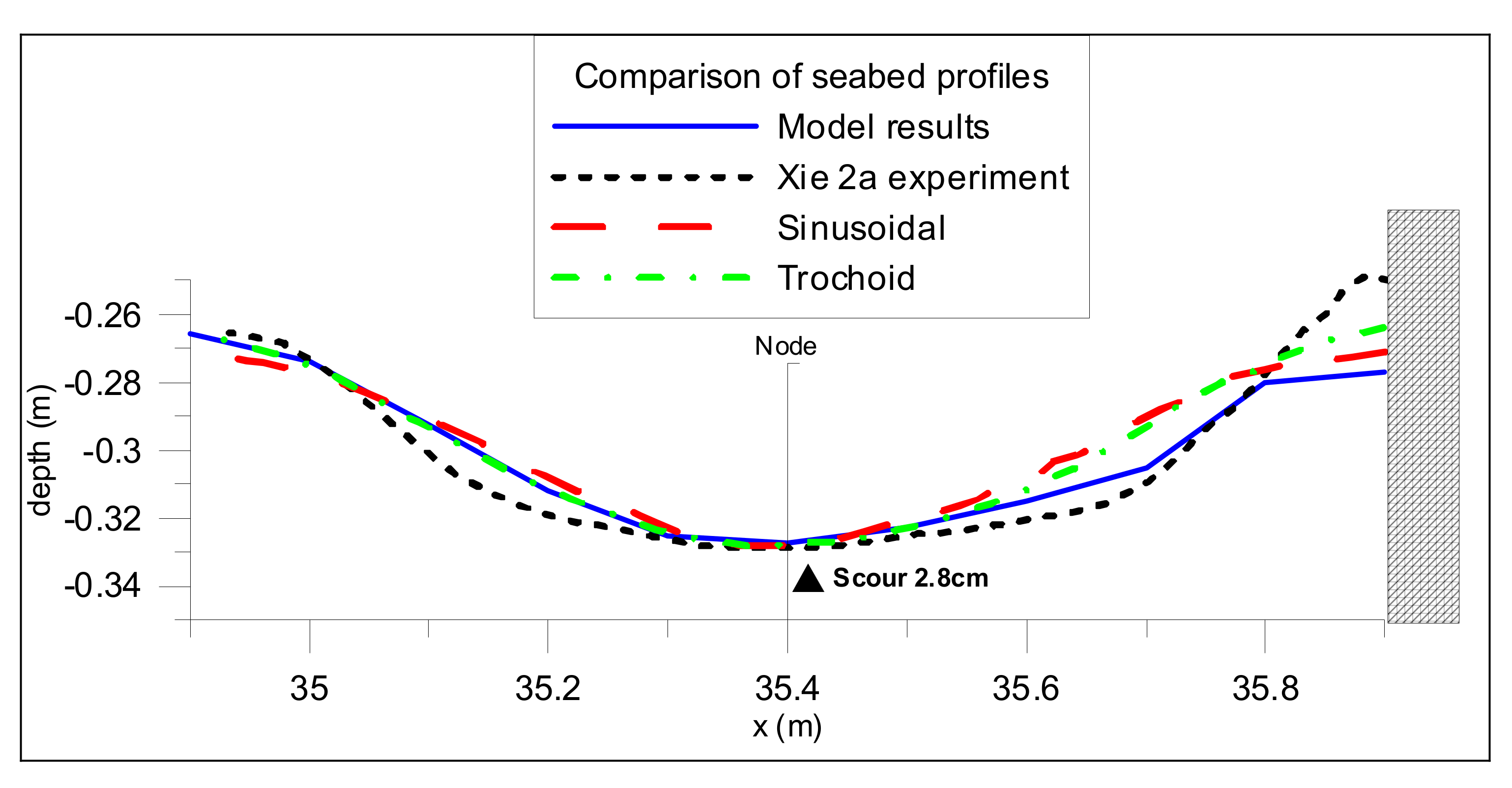
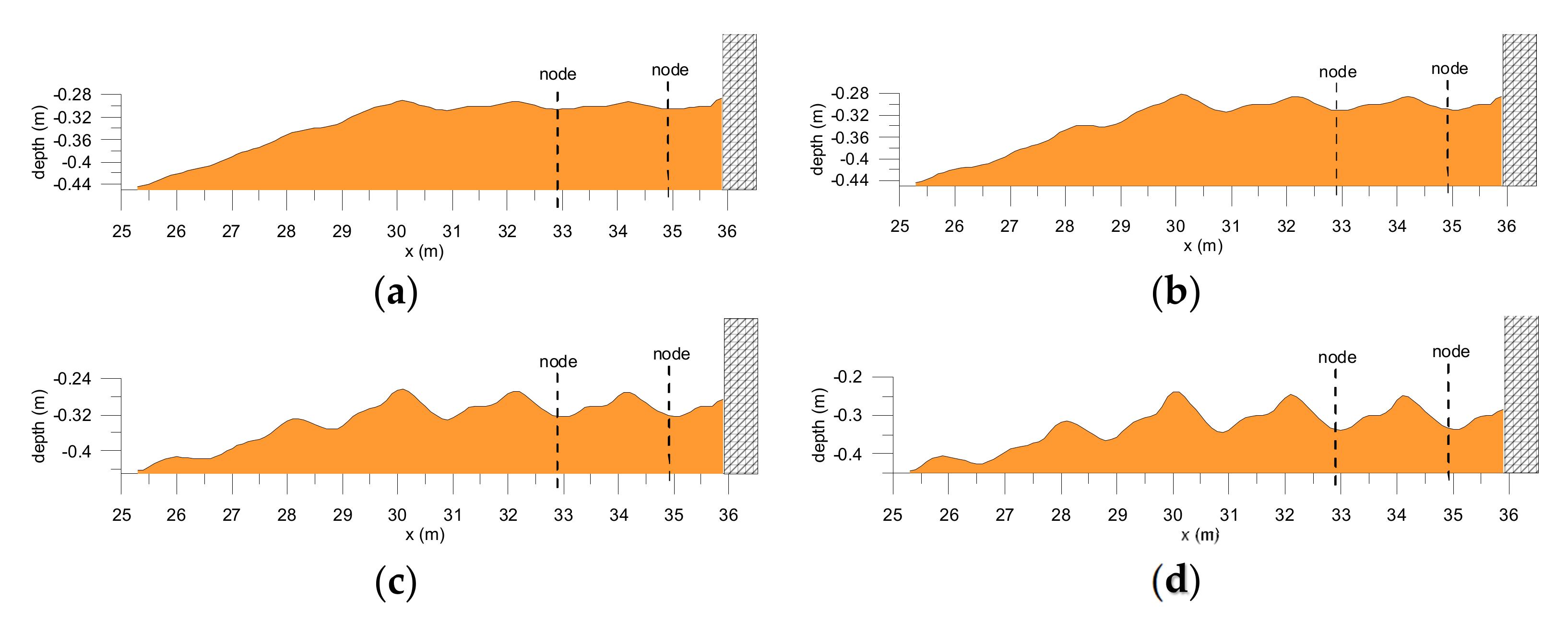
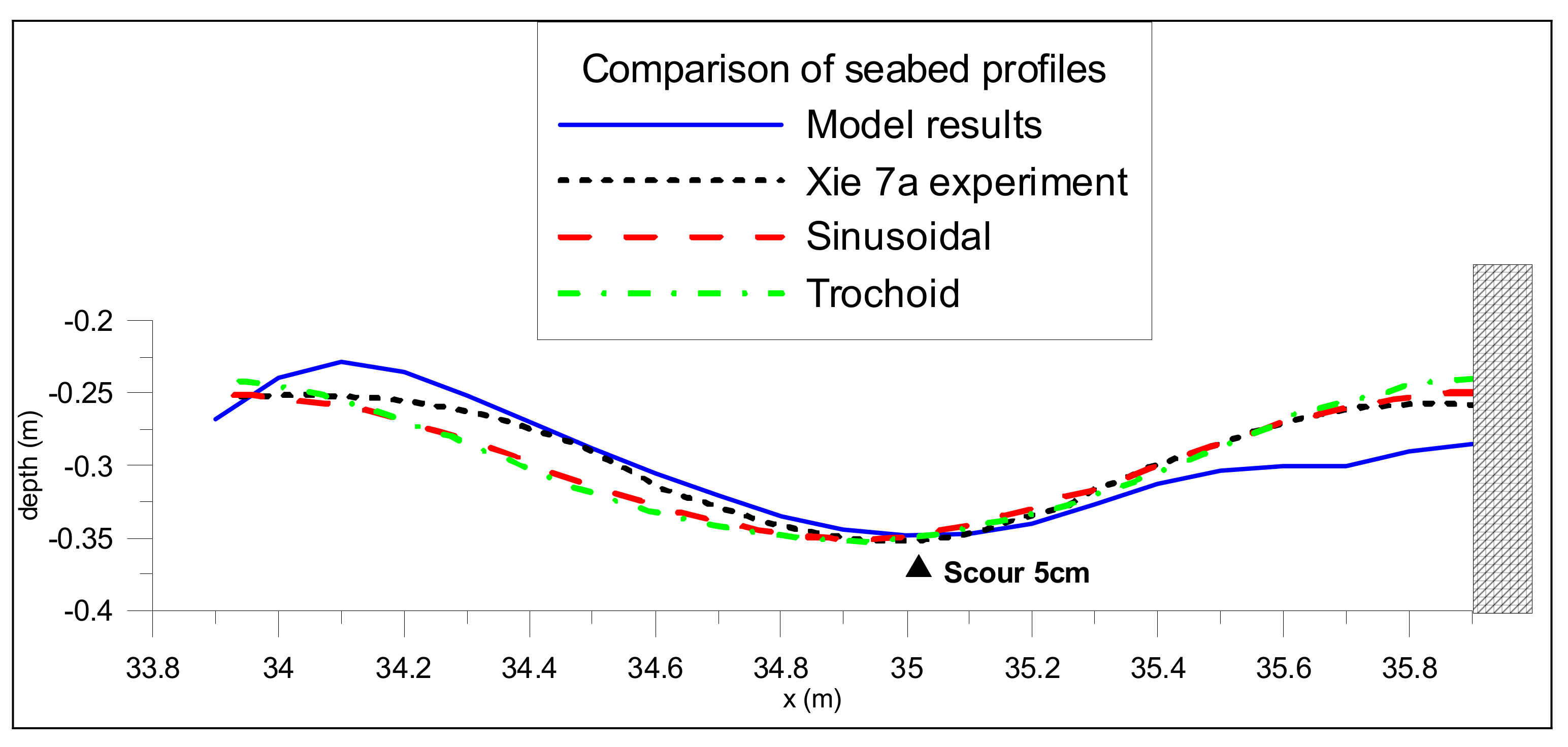
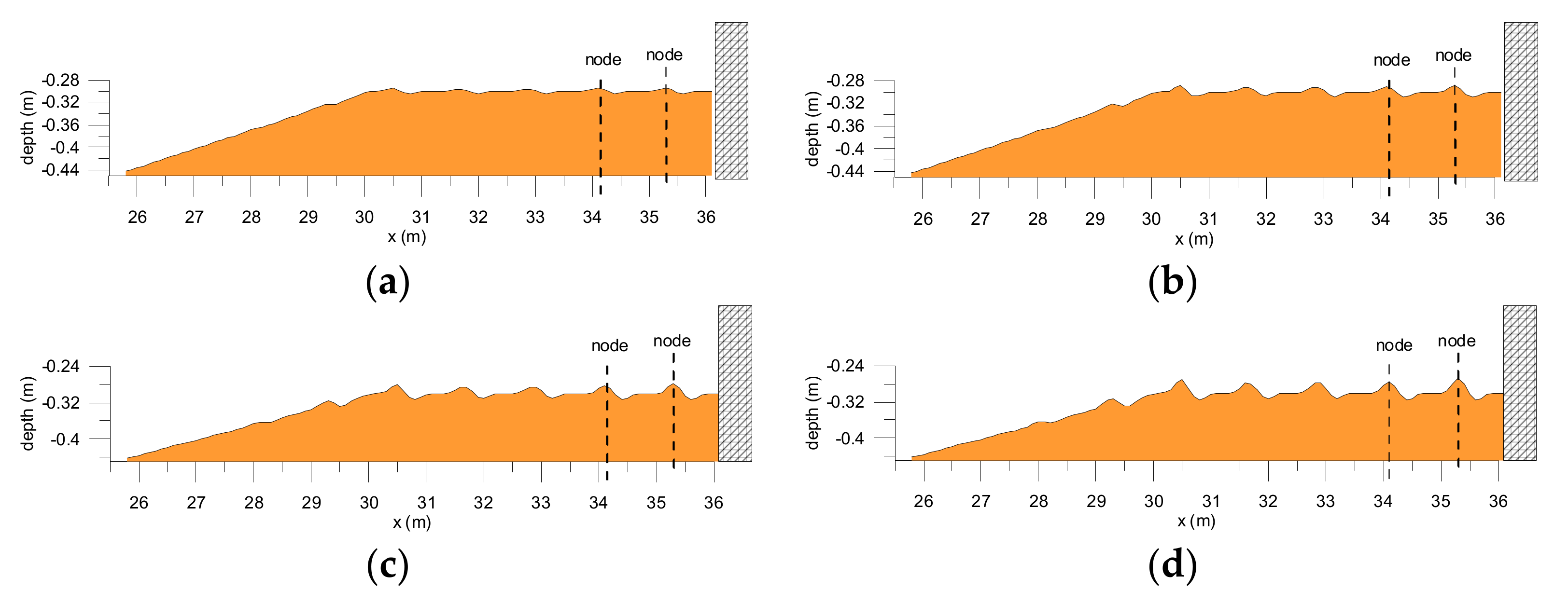
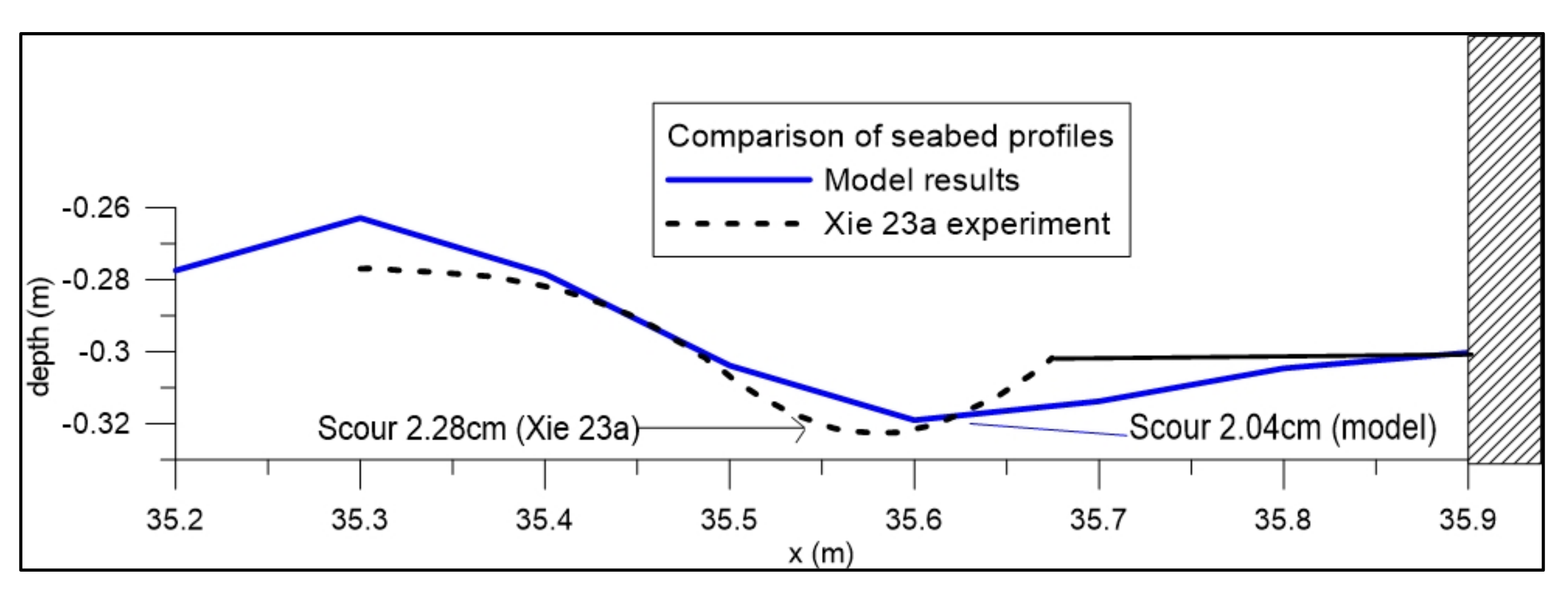
3.4. Morphodynamic Results—Scouring Depth and Scouring Patterns
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xie, S.L. Scouring Patterns in Front of Vertical Breakwaters and Their Influences on the Stability of the Foundations of the Breakwaters; Delft University of Technology: Delft, the Netherlands, 1981. [Google Scholar]
- Sumer, B.M.; Fredsøe, J. Experimental study of 2D scour and its protection at a rubble-mound breakwater. Coast. Eng. 2000, 40, 59–87. [Google Scholar] [CrossRef]
- Carter, T.G.; Liu, L.F.P.; Mei, C.C. Mass transport by waves and offshore sand bedforms. J. Waterw. Harb. Coast. Eng. ASCE 1973, 99, 165–184. [Google Scholar]
- Lee, K.; Mizutani, N. Experimental study on scour occuring at a vertical impermeable submerged breakwater. J. Appl. Ocean. Res. 2008, 30, 92–99. [Google Scholar] [CrossRef]
- Mei, C. The Applied Dynamics of Ocean Surface Waves; World Scientific: Hackensack, NJ, USA, 1989. [Google Scholar]
- Bing, C. The numerical simulation of local scour in front of a vertical-wall breakwater. J. Hydrodyn. 2007, 18, 134–138. [Google Scholar]
- Gislason, K.; Fredsøe, J.; Mayer, S.; Sumer, B.M. The mathematical modeling of the scour in front of the toe of a rubble-mound breakwater. In Book of Abstracts, Proceedings of the 27th International Coastal Engineering Conference, Sydney, Australia, 16–21 July 2000; ASCE: Reston, VA, USA, 2000; Volume 1, p. 1. [Google Scholar]
- Gislason, K.; Fredsøe, J.; Sumer, B.M. Flow under standing waves Part 1. Shear stress distribution, energy flux and steady streaming. Coast. Eng. 2009, 56, 341–362. [Google Scholar]
- Gislason, K.; Fredsøe, J.; Sumer, B.M. Flow under standing waves. Part 2. Scour and deposition in front of breakwaters. Coast. Eng. 2009, 56, 363–370. [Google Scholar] [CrossRef]
- Hajivalie, F.; Yeganeh-Bakhtiary, A.; Houshanghi, H.; Gotoh, H. Euler-Lagrange model for scour in front of vertical breakwater. Appl. Ocean Res. 2012, 34, 96–106. [Google Scholar] [CrossRef]
- Engelund, F.A.; Fredsøe, J. A sediment transport model for straight alluvial channels. Nord. Hydrol. 1976, 7, 293–306. [Google Scholar] [CrossRef]
- Karagiannis, N.; Karambas, T.; Koutitas, C. Numerical simulation of scour in front of a breakwater using OpenFoam. In Proceedings of the 4th IAHR Europe Congress, Liege, Belgium, 27–29 July 2016; pp. 309–315. [Google Scholar]
- Karagiannis, N.; Karambas, T.; Koutitas, C. Numerical simulation of scour pattern and scour depth prediction in front of a vertical breakwater using OpenFoam. In Proceedings of the 27th International Ocean and Polar Engineering Conference (ISOPE 2017), San Francisco, CA, USA, 25–30 June 2016; Volume 3, pp. 1342–1348. [Google Scholar]
- Jacobsen, N.G.; Fuhrman, D.R.; Fredsøe, J. A Wave generation toolbox for the open-source CFD library: OpenFoam. Int. J. Numer. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]
- Karagiannis, N. An Advanced Numerical Model Fully Describing the Hydro-and Morphodynamic Processes in the Coastal Zone. Ph.D. Thesis, Civil Engineering Department, Aristotle University of Thessaloniki, Thessaloniki, Greece, 2019. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Camenen, B.; Larson, M. A Unified Sediment Transport Formulation for Coastal Inlet Application; Technical report ERDC/CHL CR-07-1; US Army Engineer Research and Development Center: Vicksburg, MS, USA, 2007. [Google Scholar]
- Karagiannis, N.; Karambas, T.; Koutitas, C. Numerical simulation of wave propagation in surf and swash zone using OpenFoam. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016; Volume 3, pp. 1342–1348. [Google Scholar]
- Higuera, P.; Lara, J.L.; Losada, I.J. Realistic wave generation and active wave absorption for Navier–Stokes models: Application to OpenFOAM. Coast. Eng. 2013, 71, 102–118. [Google Scholar] [CrossRef]
- Jasak, H. Error Analysis and Estimation for the finite Volume Method with Applications to Fuid Fows. Ph.D. Thesis, Deptartment of Mechanical Engineering, Imperial College of Science, Technology and Medicine, London, UK, 1996. [Google Scholar]
- Rusche, H. Computational fluid Dynamics of Dispersed Two-Phase flows at High Phase Fractions. Ph.D. Thesis, Department of Mechanical Engineering, Imperial College of Science, Technology & Medicine, London, UK, 2003. [Google Scholar]
- Menter, F.R. Zonal Two Equation k-ω Turbulence Models for Aerodynamic Flows. AIAA Paper 1993, 1993–2906. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Karambas, T.; Koutitas, C. Surf and swash zone morphology evolution induced by nonlinear waves. J. Waterw. Port Coast. Ocean. Eng. 2002, 128, 102–113. [Google Scholar] [CrossRef]
- Karambas, T.V. Design of detached breakwaters for coastal protection: Development and application of an advanced numerical model. In Proceedings of the 33rd International Conference on Coastal Engineering, Santander, Spain, 1–6 July 2012. [Google Scholar]
- Watanabe, A. Modeling of sediment transport and beach evolution. In Nearshore Dynamics and Coastal Processes; Horikawa, K., Ed.; University of Tokyo Press: Tokyo, Japan, 1998; pp. 292–302. [Google Scholar]
- Nielsen, P. Some Basic Concepts of Wave Sediment Transport; Series Paper 20; Institute of Hydrodynamics and Hydraulic Engineering (ISVA); Technical University of Denmark: Lyngby, Denmark, 1979. [Google Scholar]
- Leont’yev, I.O. Numerical modelling of beach erosion during storm event. Coast. Eng. 1996, 29, 187–200. [Google Scholar] [CrossRef]
- Gisen, D. Generation of a 3-D Mesh Using SnappyHexMesh Featuring Anisotropic Refinement and Near-Wall Layers; ICHE: Hamburg, Germany, 2014. [Google Scholar]
- Jacobsen, N.G. A Full Hydro-And Morphodynamic Description of Breaker Bar Development. Ph.D. Thesis, Department of Mechanical Engineering, Technical University of Denmark, Lyngby, Denmark, 2011. [Google Scholar]
- Sweby, P.K. High resolution schemes using flux-limiters for hyperbolic conservation laws. SIAM J. Numer. Anal. 1984, 21, 995–1011. [Google Scholar] [CrossRef]
- Warming, R.F.; Beam, M.M. Upwind second-order difference schemes and applications in aerodynamic flows. AIAA J. 1976, 14, 1241–1249. [Google Scholar] [CrossRef]
- Karagiannis, N.; Karambas, T.; Koutitas, C. Wave overtopping numerical simulation using OpenFoam. In Proceedings of the 36th IAHR World Congress, The Hague, The Netherlands, 28 June–3 July 2015. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | D50 | wf | H | T | L | H/L | H/gT2 | d/L | H/D50 | Group |
|---|---|---|---|---|---|---|---|---|---|---|
| 2a | 106 μm | 0.7 cm/s | 7.5 cm | 1.32 s | 2.0 m | 0.0375 | 0.0044 | 0.15 | 707.5 | Fine |
| 7a | 106 μm | 0.7 cm/s | 5 cm | 2.41 s | 4.0 m | 0.0125 | 0.0009 | 0.075 | 471.7 | Fine |
| 23a | 780 μm | 11 cm/s | 6.5 cm | 1.53 s | 2.4 m | 0.0271 | 0.0028 | 0.125 | 83.3 | Coarse |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karagiannis, N.; Karambas, T.; Koutitas, C. Numerical Simulation of Scour Depth and Scour Patterns in Front of Vertical-Wall Breakwaters Using OpenFOAM. J. Mar. Sci. Eng. 2020, 8, 836. https://doi.org/10.3390/jmse8110836
Karagiannis N, Karambas T, Koutitas C. Numerical Simulation of Scour Depth and Scour Patterns in Front of Vertical-Wall Breakwaters Using OpenFOAM. Journal of Marine Science and Engineering. 2020; 8(11):836. https://doi.org/10.3390/jmse8110836
Chicago/Turabian StyleKaragiannis, Nikolaos, Theophanis Karambas, and Christopher Koutitas. 2020. "Numerical Simulation of Scour Depth and Scour Patterns in Front of Vertical-Wall Breakwaters Using OpenFOAM" Journal of Marine Science and Engineering 8, no. 11: 836. https://doi.org/10.3390/jmse8110836
APA StyleKaragiannis, N., Karambas, T., & Koutitas, C. (2020). Numerical Simulation of Scour Depth and Scour Patterns in Front of Vertical-Wall Breakwaters Using OpenFOAM. Journal of Marine Science and Engineering, 8(11), 836. https://doi.org/10.3390/jmse8110836