Sensitivity and Directivity Analysis of Piezoelectric Ultrasonic Cantilever-Based MEMS Hydrophone for Underwater Applications

 , and
, and
Abstract
1. Introduction
2. Materials and Methods
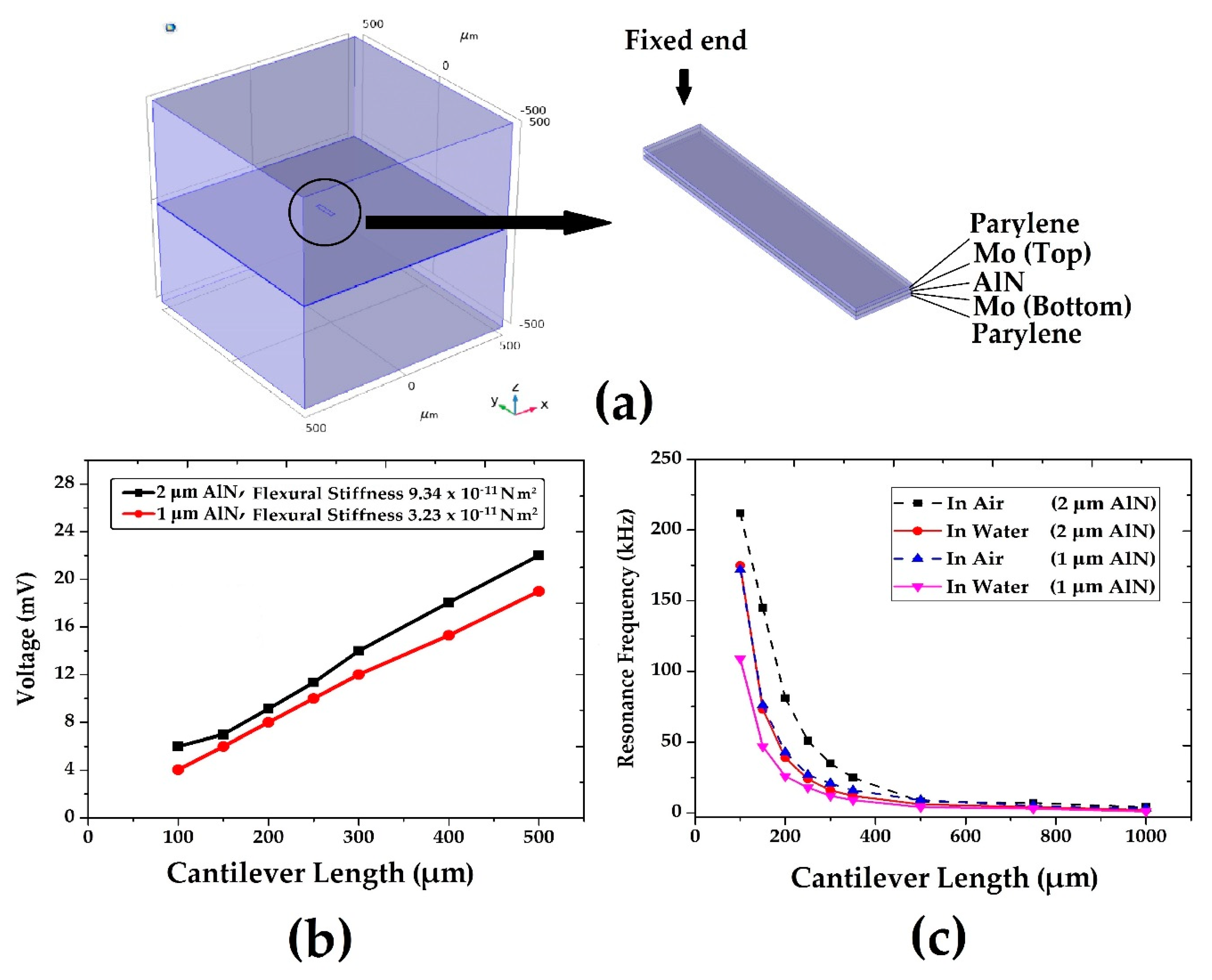
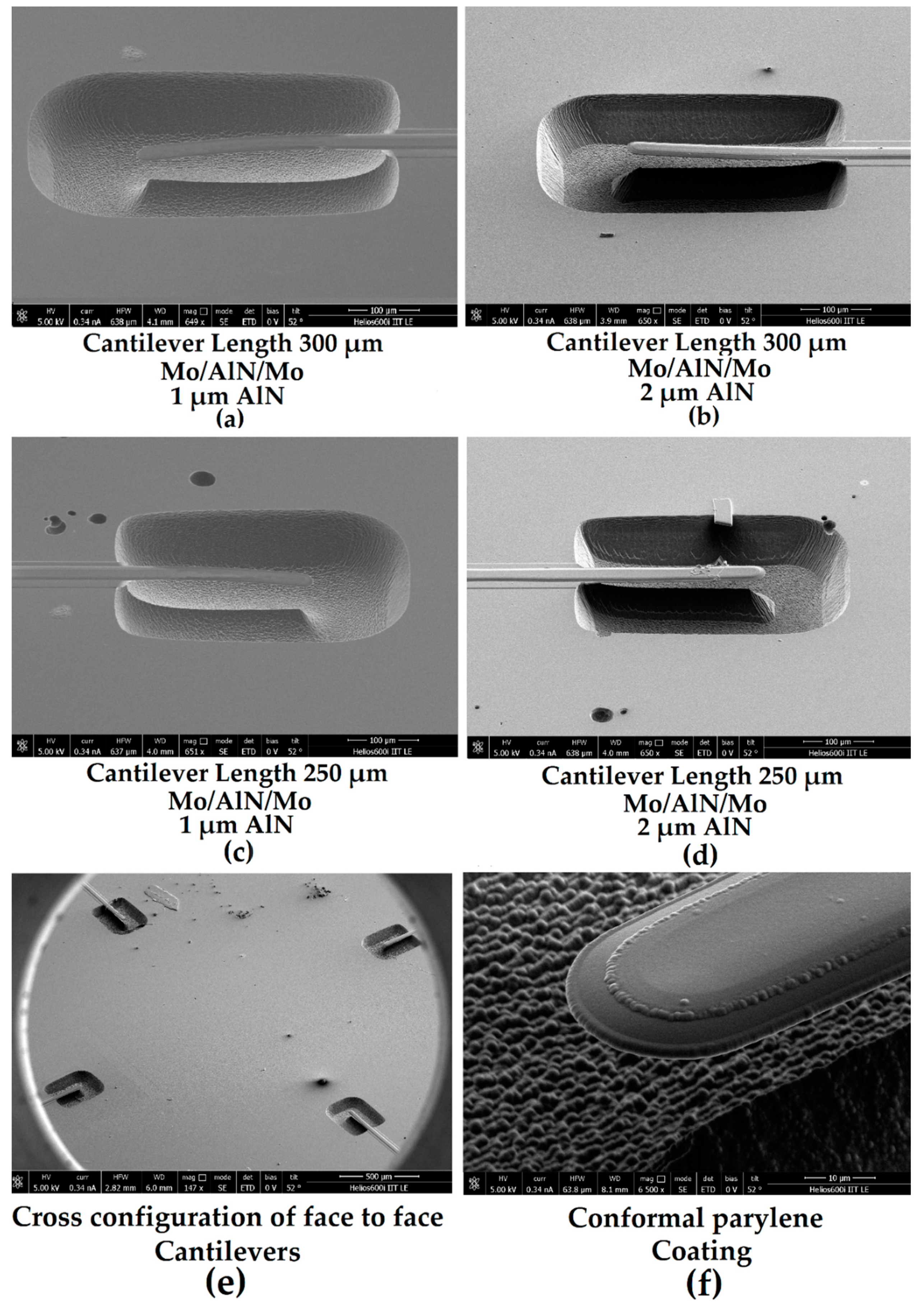
Device Design and Fabrication
3. Results and Discussion
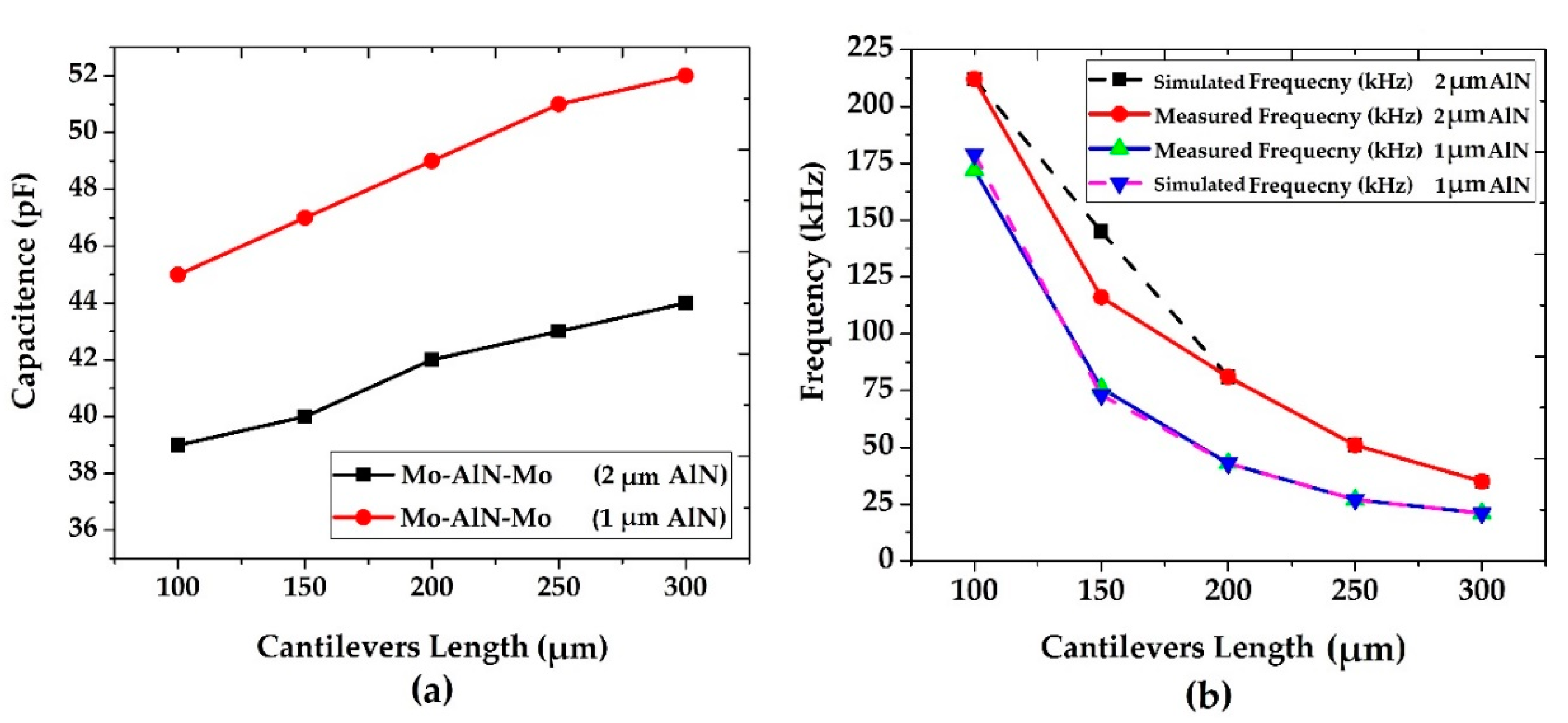
3.1. Underwater Characterization
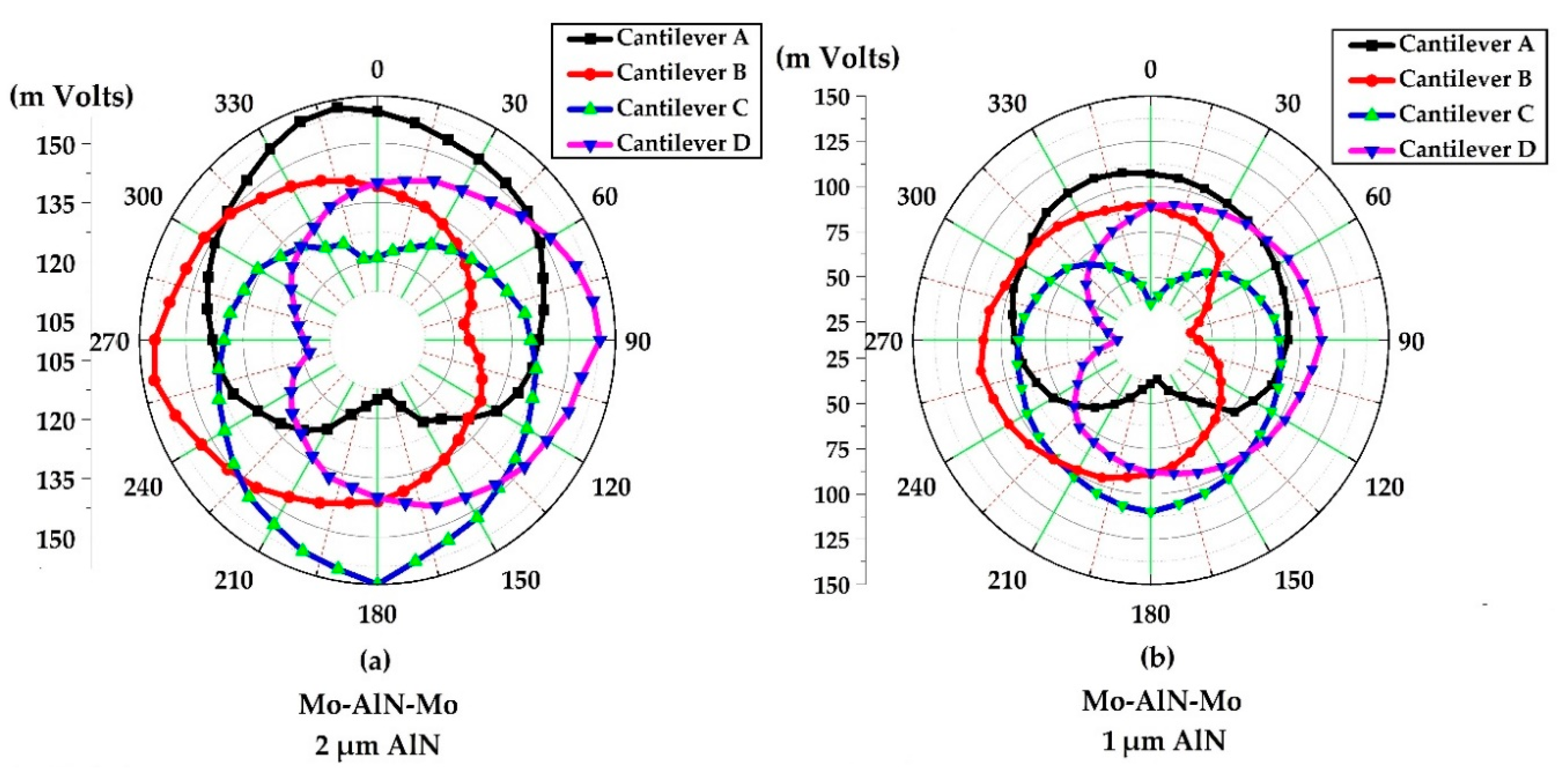
3.2. Directionality
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Guan, L.; Xue, C.; Zhang, G.; Zhang, W.; Wang, P. Advancements in Technology and Design of NEMS Vector Hydrophone. Microsyst. Technol. 2011, 17, 459–467. [Google Scholar] [CrossRef]
- Chang, L. Foundations of MEMS, 2nd ed.; Gilfillan, A., Ed.; Pearson Education: London, UK, 2012; Chapter 3; p. 122. ISBN 0-13-249736-0. [Google Scholar]
- Yang, J.; Zhang, M.; Si, C.; Han, G.; Ning, J.; Yang, F.; Wang, X. A T-Shape Aluminum Nitride Thin-Film Piezoelectric MEMS Resonant Accelerometer. J. Microelectromech. Syst. 2019, 28, 776–781. [Google Scholar] [CrossRef]
- Wang, Y.; Yan, J.; Cheng, H.; Chen, N.; Yan, P.; Ouyang, J. Low Thermal Budget Lead Zirconate Titanate Thick Films Integrated on Si for Piezo-MEMS Applications. Microelectron. Eng. 2020, 219, 111145. [Google Scholar] [CrossRef]
- Guojun, Z.; Panpan, W.; Linggang, G.; Jijun, X.; Wendong, Z. Improvement of the MEMS Bionic Vector Hydrophone. Microelectron. J. 2011, 42, 815–819. [Google Scholar] [CrossRef]
- Xue, C.; Chen, S.; Zhang, W.; Zhang, B.; Zhang, G.; Qiao, H. Design, Fabrication, and Preliminary Characterization of a Novel MEMS Bionic Vector Hydrophone. Microelectron. J. 2007, 38, 1021–1026. [Google Scholar] [CrossRef]
- Rockstad, H.K.; Kenny, T.W.; Kelly, P.J.; Gabrielson, T.B. A Microfabricated Electron-Tunneling Accelerometer as a Directional Underwater Acoustic Sensor. Am. Inst. Phys. 2008, 57, 57–68. [Google Scholar] [CrossRef]
- Swartz, R.G.; Plummer, J.D. Integrated Silicon-PVF2 Acoustic Transducer Arrays. IEEE Trans. Electron. Devices 1979, 26, 1921–1931. [Google Scholar] [CrossRef]
- Akasheh, F.; Myers, T.; Fraser, J.D.; Bose, S.; Bandyopadhyay, A. Development of Piezoelectric Micromachined Ultrasonic Transducers. Sens. Actuators A Phys. 2004, 111, 275–287. [Google Scholar] [CrossRef]
- Guan, L.; Zhang, G.; Xu, J.; Xue, C.; Zhang, W.; Xiong, J. Design of T-Shape Vector Hydrophone Based on MEMS. Sens. Actuators A Phys. 2012, 188, 35–40. [Google Scholar] [CrossRef]
- Minh-Dung, N.; Hoang-Phuong, P.; Matsumoto, K.; Shimoyama, L. A Sensitive Liquid-Cantilever Diaphragm for Pressure Sensor. In Proceedings of the 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 617–620. [Google Scholar] [CrossRef]
- Minh-Dimg, N.; Hoang-Phuong, P.; Matsumoto, K.; Shimoyama, I. A Hydrophone Using Liquid to Bridge the Gap of a Piezo-Resistive Cantilever. In Proceedings of the 17th International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers & Eurosensors XXVII, Barcelona, Spain, 16–20 June 2013; pp. 70–73. [Google Scholar] [CrossRef]
- Choi, S.; Lee, H.; Moon, W. A Micro-Machined Piezoelectric Hydrophone with Hydrostatically Balanced Air Backing. Sens. Actuators A Phys. 2010, 158, 60–71. [Google Scholar] [CrossRef]
- Tan, X.; Lv, Y.; Zhou, X.; Song, X.; Wang, Y.; Gu, G.; Guo, H.; Liang, S.; Feng, Z.; Cai, S. High Performance AlGaN/GaN Pressure Sensor with a Wheatstone Bridge Circuit. Microelectron. Eng. 2020, 219, 111143. [Google Scholar] [CrossRef]
- Amiri, P.; Kordrostami, Z. Sensitivity Enhancement of MEMS Diaphragm Hydrophones Using an Integrated Ring MOSFET Transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 2121–2130. [Google Scholar] [CrossRef] [PubMed]
- Kordrostami, Z.; Roohizadegan, S. Particle Swarm Approach to the Optimisation of Trenched Cantilever-Based MEMS Piezoelectric Energy Harvesters. IET Sci. Meas. Technol. 2019, 13, 536–543. [Google Scholar] [CrossRef]
- Malleron, K.; Gensbittel, A.; Talleb, H.; Ren, Z. Experimental Study of Magnetoelectric Transducers for Power Supply of Small Biomedical Devices. Microelectron. J. 2019, 88, 184–189. [Google Scholar] [CrossRef]
- Kashiwao, T.; Izadgoshasb, I.; Lim, Y.Y.; Deguchi, M. Optimization of Rectifier Circuits for a Vibration Energy Harvesting System Using a Macro-Fiber Composite Piezoelectric Element. Microelectron. J. 2016, 54, 109–115. [Google Scholar] [CrossRef]
- Littrell, R.; Grosh, K. Modeling and Characterization of Cantilever-Based MEMS Piezoelectric Sensors and Actuators. J. Microelectromech. Syst. 2012, 21, 406–413. [Google Scholar] [CrossRef]
- Tsai, J.M.; Daneman, M.; Boser, B.; Horsley, D.; Tang, H.Y.; Lu, Y.; Rozen, O.; Liu, F.; Lim, M.; Assaderaghi, F. Versatile CMOS-MEMS Integrated Piezoelectric Platform. In Proceedings of the 18th International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Alaska, AK, USA, 21–25 June 2015; pp. 2248–2251. [Google Scholar] [CrossRef]
- Horsley, D.A.; Przybyla, R.J.; Kline, M.H.; Shelton, S.E.; Guedes, A.; Izyumin, O.; Boser, B.E. Piezoelectric Micro Machined Ultrasonic Transducers in Consumer Electronics: The Next Little Things? In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 145–148. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, X.; Fernando, S.N.; Chai, K.T.; Gu, Y. AlN-on-SOI Platform-Based Micro-Machined Hydrophone. Appl. Phys. Lett. 2016, 109, 3–8. [Google Scholar] [CrossRef]
- Roozbeh, T.; Mojtaba, H.S.; Farrokh, A. High-Frequency AlN-on-Silicon Resonant Square Gyroscopes. J. Microelectromech. Syst. 2011, 20, 1225–1227. [Google Scholar] [CrossRef]
- Hodjat-Shamami, M.; Norouzpour-Shirazi, A.; Tabrizian, R.; Ayazi, F. A Dynamically Mode-Matched Piezoelectrically Transduced High-Frequency Flexural Disk Gyroscope. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Estoril, Portugal, 18–22 January 2015; pp. 789–792. [Google Scholar] [CrossRef]
- Goericke, F.T.; Vigevani, G.; Pisano, A.P. Bent-Beam Sensing with Triple-Beam Tuning Forks. Appl. Phys. Lett. 2013, 102. [Google Scholar] [CrossRef]
- Zuo, C.; Van Der Spiegel, J.; Piazza, G. 1.05-GHz CMOS Oscillator Based on Lateral- Field-Excited Piezoelectric AlN Contour-Mode MEMS Resonators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 82–87. [Google Scholar] [CrossRef]
- Sorokin, B.P.; Kvashnin, G.M.; Volkov, A.P.; Bormashov, V.S.; Aksenenkov, V.V.; Kuznetsov, M.S.; Gordeev, G.I.; Telichko, A.V. AlN/Single Crystalline Diamond Piezoelectric Structure as a High Overtone Bulk Acoustic Resonator. Appl. Phys. Lett. 2013, 102, 10–13. [Google Scholar] [CrossRef]
- Lin, C.M.; Yen, T.T.; Lai, Y.J.; Felmetsger, V.V.; Hopcroft, M.A.; Kuypers, J.H.; Pisano, A.P. Temperature-Compensated Aluminum Nitride Lamb Wave Resonators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 524–532. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, A.; Mohd-Yasin, F. Reactive Sputtering of Aluminum Nitride (002) Thin Films for Piezoelectric Applications: A Review. Sensors 2018, 18, 1797. [Google Scholar] [CrossRef] [PubMed]
- Liang, J.; Zhang, H.; Zhang, D.; Duan, X.; Zhang, H.; Pang, W. Design and Fabrication of Aluminum Nitride Lamb Wave Resonators towards High Figure of Merit for Intermediate Frequency Filter Applications. J. Micromech. Microeng. 2015, 25. [Google Scholar] [CrossRef]
- Kordrostami, Z.; Roohizadegan, S. A Groove Engineered Ultralow Frequency Piezomems Energy Harvester with Ultrahigh Output Voltage. Int. J. Mod. Phys. B 2018, 32, 1–17. [Google Scholar] [CrossRef]
- Ghoddus, H.; Kordrostami, Z. Harvesting the Ultimate Electrical Power from MEMS Piezoelectric Vibration Energy Harvesters: An Optimization Approach. IEEE Sens. J. 2018, 18, 8667–8675. [Google Scholar] [CrossRef]
- Ghoddus, H.; Kordrostami, Z.; Amiri, P. Performance Enhancement of MEMS-Guided Four Beam Piezoelectric Transducers for Energy Harvesting and Acceleration Sensing. Int. J. Mod. Phys. B 2019, 33, 1–16. [Google Scholar] [CrossRef]
- Asthana, P.; Khanna, G. A Broadband Piezoelectric Energy Harvester for IoT Based Applications. Microelectron. J. 2019, 93, 104635. [Google Scholar] [CrossRef]
- Abdelmageed, M.G.; Fath El-Bab, A.M.R.; Abouelsoud, A.A. Design and Simulation of Pulsatile Blood Flow Energy Harvester for Powering Medical Devices. Microelectron. J. 2019, 8, 105–113. [Google Scholar] [CrossRef]
- Sherman, C.H.; Bulter, J.L. Transducers and Arrays for Underwater Sound, 1st ed.; Springer: New York, NY, USA, 2007. [Google Scholar] [CrossRef]
- Asadnia, M.; Kottapalli, A.G.P.; Shen, Z.; Miao, J.; Triantafyllou, M. Flexible and Surface-Mountable Piezoelectric Sensor Arrays for Underwater Sensing in Marine Vehicles. IEEE Sens. J. 2013, 13, 3918–3925. [Google Scholar] [CrossRef]
- Lasky, M.; Doolittle, R.D.; Simmons, B.D.; Lemon, S.G. Recent Progress in Towed Hydrophone Array Research. IEEE J. Ocean. Eng. 2004, 29, 374–387. [Google Scholar] [CrossRef]
- Bernstein, J.J.; Finberg, S.L.; Houston, K.; Niles, L.C.; Daniel Chen, H.; Eric Cross, L.; Li, K.K.; Udayakumar, K. Micromachined High Frequency Ferroelectric Sonar Transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 960–969. [Google Scholar] [CrossRef]
- Asanuma, H.; Hashimoto, S.; Tano, S.I.; Takashima, S.I.; Nishizawa, M.; Niitsuma, H.; Shindo, Y. Development of Fiber-Optical Microsensors for Geophysical Use. In Proceedings of the 2003 International Conference on Physics and Control, Tokyo, Japan, 25–27 June 2003; p. 315. [Google Scholar] [CrossRef]
- Huttunen, T.; Kaipio, J.P.; Hynynen, K. Modeling of Anomalies Due to Hydrophones in Continuous-Wave Ultrasound Fields. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2003, 50, 1486–1500. [Google Scholar] [CrossRef] [PubMed]
- Rizzi, F.; Qualtieri, A.; Dattoma, T.; Epifani, G.; De Vittorio, M. Biomimetics of Underwater Hair Cell Sensing. Microelectron. Eng. 2015, 132, 90–97. [Google Scholar] [CrossRef]
- Abels, C.; Mastronardi, V.M.; Guido, F.; Dattoma, T.; Qualtieri, A.; Megill, W.M.; De Vittorio, M.; Rizzi, F. Nitride-Based Materials for Flexible MEMS Tactile and Flow Sensors in Robotics. Sensors 2017, 17, 1080. [Google Scholar] [CrossRef] [PubMed]
- Abdul, B.; Mastronardi, V.M.; Qualtieri, A.; Guido, F.; Algieri, L.; Rizzi, F.; De Vittorio, M. Design, Fabrication and Characterization of Piezoelectric Cantilever MEMS for Underwater Application. Micro Nano Eng. 2020, 7, 100050. [Google Scholar] [CrossRef]
- Rizzi, F.; Qualtieri, A.; Chambers, L.; Epifani, G.; Megil, M.W.; De Vittorio, M. Stress-Driven Artificial Hair Cell for Flow Sensing. In Flow Sensing in Air and Water; Bleckmann, H., Mogdans, J., Coombs, S.L., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; Chapter 9; pp. 499–520. [Google Scholar] [CrossRef]
- Qualtieri, A.; Rizzi, F.; Todaro, M.T.; Passaseo, A.; Cingolani, R.; De Vittorio, M. Stress-Driven AlN Cantilever-Based Flow Sensor for Fish Lateral Line System. Microelectron. Eng. 2011, 88, 2376–2378. [Google Scholar] [CrossRef]
- Qualtieri, A.; Rizzi, F.; Epifani, G.; Ernits, A.; Kruusmaa, M.; De Vittorio, M. Parylene-Coated Bioinspired Artificial Hair Cell for Liquid Flow Sensing. Microelectron. Eng. 2012, 98, 516–519. [Google Scholar] [CrossRef]
- Lim, Y.; Joh, C.; Seo, H.; Kim, J.; Roh, Y. Design and Fabrication of a Multimode Ring Vector Hydrophone. Jpn. J. Appl. Phys. 2014, 53. [Google Scholar] [CrossRef]
- Butler, A.L.; Butler, J.L.; Dalton, W.L.; Rice, J.A. Multimode Directional Telesonar Transducer. Ocean. Conf. Rec. 2000, 2, 1289–1292. [Google Scholar] [CrossRef]
- Sessler, G.M.; West, J.E. Directional Transducers. IEEE Trans. Audio Electroacoust. 1971, 19, 19–23. [Google Scholar] [CrossRef]
- Caruso, F.; Alonge, G.; Bellia, G.; De Domenico, E.; Grammauta, R.; Larosa, G.; Mazzola, S.; Riccobene, G.; Pavan, G.; Papale, E.; et al. Long-Term Monitoring of Dolphin Biosonar Activity in Deep Pelagic Waters of the Mediterranean Sea. Sci. Rep. 2017, 7, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Madaro, F.; Mehdipour, I.; Caricato, A.; Guido, F.; Rizzi, F.; Carlucci, A.P.; De Vittorio, M. Available Energy in Cars’ Exhaust System for IoT Remote Exhaust Gas Sensor and Piezoelectric Harvesting. Energies 2020, 13, 4169. [Google Scholar] [CrossRef]
- COMSOL. Material Database; COMSOL: Burlington, MA, USA, 2020. [Google Scholar]
- Bao, M.H. Analysis and Design Principles of MEMS Devices, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2005; Chapter 2; pp. 71–72. [Google Scholar] [CrossRef]
- Hang, G.J.; Li, Z.; Wu, S.J.; Xue, C.Y.; Yang, S.E.; Zhang, W.D. A Bionic Fish Cilia Median-Low Frequency Three-Dimensional Piezoresistive MEMS Vector Hydrophone. Nano-Micro Lett. 2014, 6, 136–142. [Google Scholar] [CrossRef]
- Onda Hydrophone Corporation. Available online: http://www.generex.co.jp/Ultrasonic/Hydrophone/pdf/2013_ONDA_HNP_120913.pdf (accessed on 20 June 2020).
- Brüel & Kjær. Technical Documentation: Hydrophones—Types 8103, 8104, 8105 and 8106; Brüel & Kjær: Nærum, Denmark, 1992; p. 8. Available online: http://www.lthe.fr/LTHE/IMG/pdf/DocBruelKjaerHydro.pdf (accessed on 8 October 2020).
- Liu, L.; Zhang, W.; Zhang, G.; Guan, L.; Xue, C.; Zhang, H.; Xue, N. Research on Double T-Shape MEMS Bionic Vector Hydrophone and Its Application in Obstacle Avoidance Sonar. Sens. Rev. 2015, 35, 76–84. [Google Scholar] [CrossRef]
- Guan, L.; Zhang, G.; Xue, C.; Zhang, W.; Xiong, J.; Xu, J. Design of T-shape vector hydrophone based on MEMS. In Proceedings of the 2011 16th International Solid-State Sensors, Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011; pp. 20–23. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Thickness | Poisson Ratio | Density (g/cm3) | Young Modulus (GPa) | Relative Permittivity |
|---|---|---|---|---|---|
| Molybdenum | 200 nm (Top and Bottom) | 0.29 | 10.1 | 315 | 1 |
| Aluminum Nitride Parylene | 1 µm and 2 µm 1 µm | 0.27 0.40 | 3.30 1.28 | 348 2.80 | 9 - |
| Reference | Cantilevers (L X W X T) µm | Sensitivity (dB) | Frequency Band Width | Transduction Mechanisms |
|---|---|---|---|---|
| [57] [3] [58] [59] [55] [1] [6] | - 1000 × 120 × 10 1500 × 130 × 20 3500 × 130 × 20 - 1000 × 120 × 15 5000 × 150 | −211 −197 −180 −180 −180 −170 −165 | 20 kHz to 180 kHz @ 40 Hz 20Hz to 2 kHz 20 Hz to 2.5 kHz 25 Hz to 1.5 kHz 40 Hz to 4 kHz 20 Hz to 2 kHz | Commercial, Needle-Based Piezo-resistive Piezo-resistive Piezo-resistive Piezo-resistive Piezo-resistive Piezo-resistive |
| MEMS Hydrophone (In this paper) | 300 × 70 × 2.4 | −163 | 20 kHz to 200 kHz | Piezo-electric |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdul, B.; Mastronardi, V.M.; Qualtieri, A.; Algieri, L.; Guido, F.; Rizzi, F.; De Vittorio, M. Sensitivity and Directivity Analysis of Piezoelectric Ultrasonic Cantilever-Based MEMS Hydrophone for Underwater Applications. J. Mar. Sci. Eng. 2020, 8, 784. https://doi.org/10.3390/jmse8100784
Abdul B, Mastronardi VM, Qualtieri A, Algieri L, Guido F, Rizzi F, De Vittorio M. Sensitivity and Directivity Analysis of Piezoelectric Ultrasonic Cantilever-Based MEMS Hydrophone for Underwater Applications. Journal of Marine Science and Engineering. 2020; 8(10):784. https://doi.org/10.3390/jmse8100784
Chicago/Turabian StyleAbdul, Basit, Vincenzo Mariano Mastronardi, Antonio Qualtieri, Luciana Algieri, Francesco Guido, Francesco Rizzi, and Massimo De Vittorio. 2020. "Sensitivity and Directivity Analysis of Piezoelectric Ultrasonic Cantilever-Based MEMS Hydrophone for Underwater Applications" Journal of Marine Science and Engineering 8, no. 10: 784. https://doi.org/10.3390/jmse8100784
APA StyleAbdul, B., Mastronardi, V. M., Qualtieri, A., Algieri, L., Guido, F., Rizzi, F., & De Vittorio, M. (2020). Sensitivity and Directivity Analysis of Piezoelectric Ultrasonic Cantilever-Based MEMS Hydrophone for Underwater Applications. Journal of Marine Science and Engineering, 8(10), 784. https://doi.org/10.3390/jmse8100784