Wireless Remote Control for Underwater Vehicles



Abstract
1. Introduction
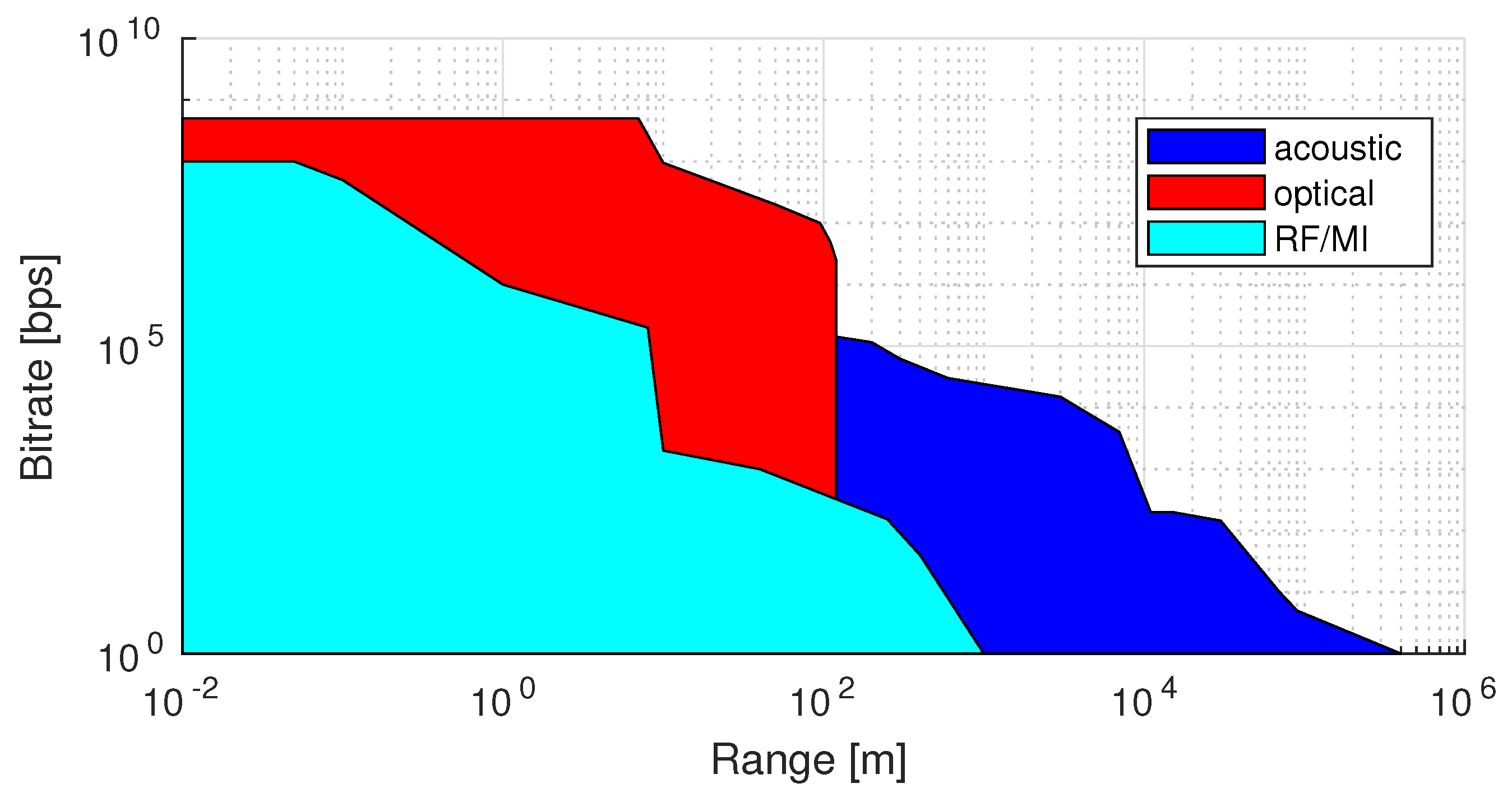
2. Underwater Communication Technologies
2.1. Underwater Acoustic Communications
2.2. Optical Communications
2.3. Radio Frequency and Magneto-Inductive Communications
2.4. Modem Selection and Considerations
3. Requirements and Definition of Working Modes for ROV Control
3.1. Raw Data Streams Analysis
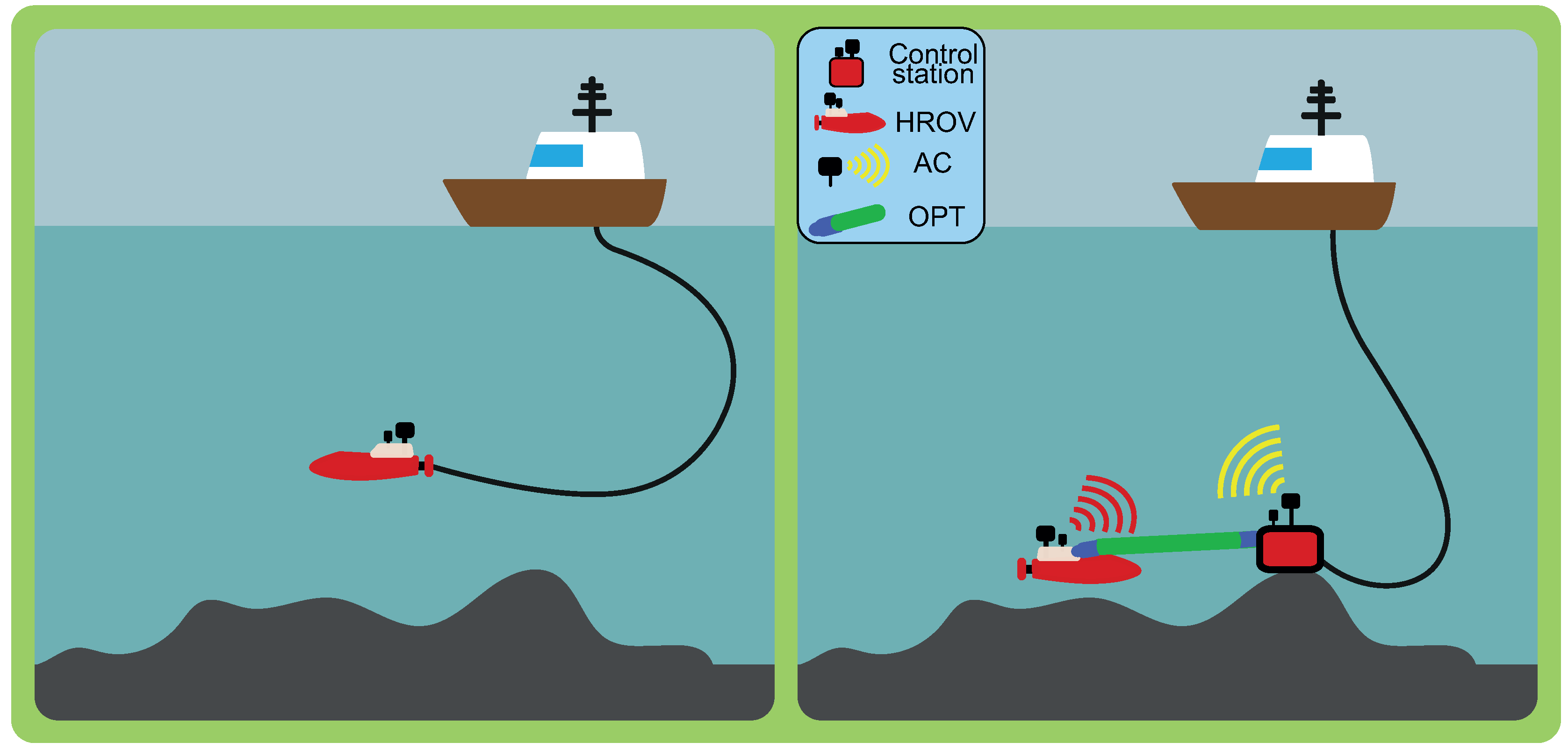
3.2. Short-Range Full-Capacity Wireless Mode
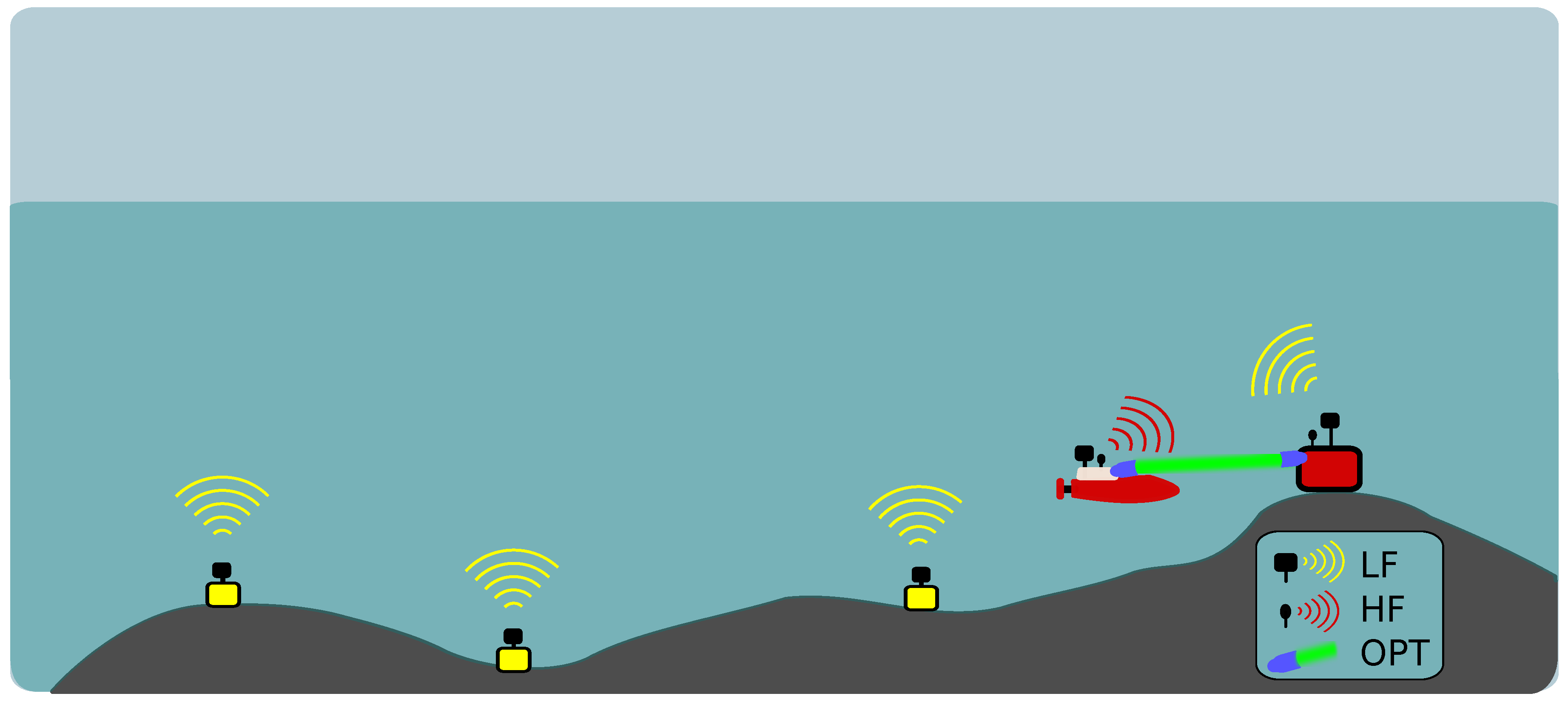
3.3. Mid-Range Low-Capacity Wireless Mode
3.4. Long-Range Minimum Control Wireless Mode
4. Scenario Description and Simulation Setup
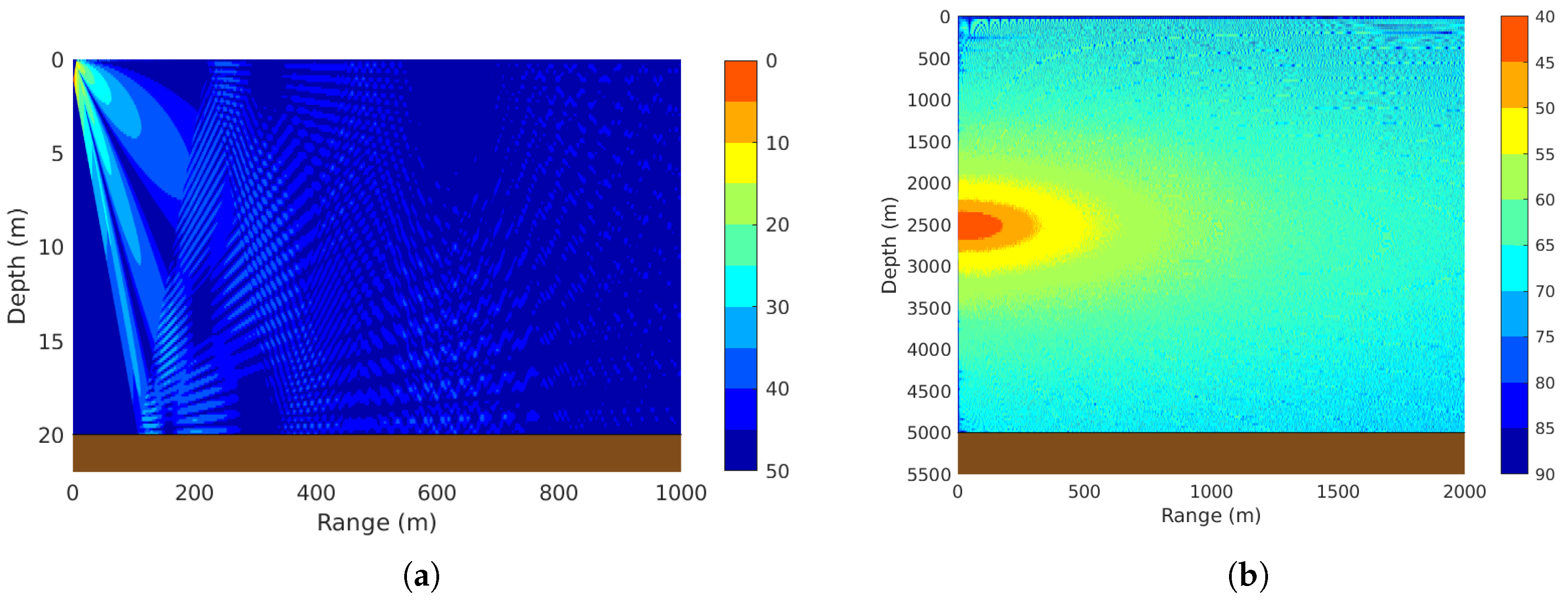
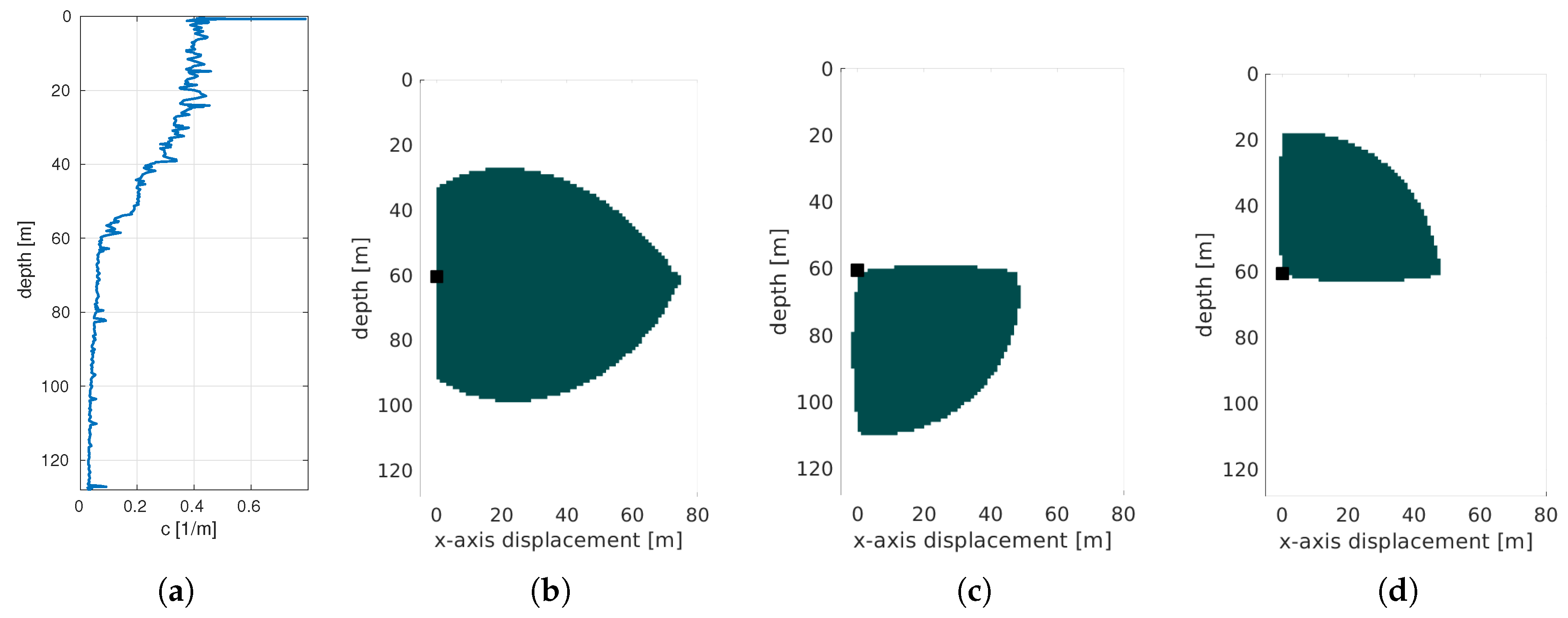
4.1. Optical Modem Simulator
4.2. Acoustic Modem Simulator
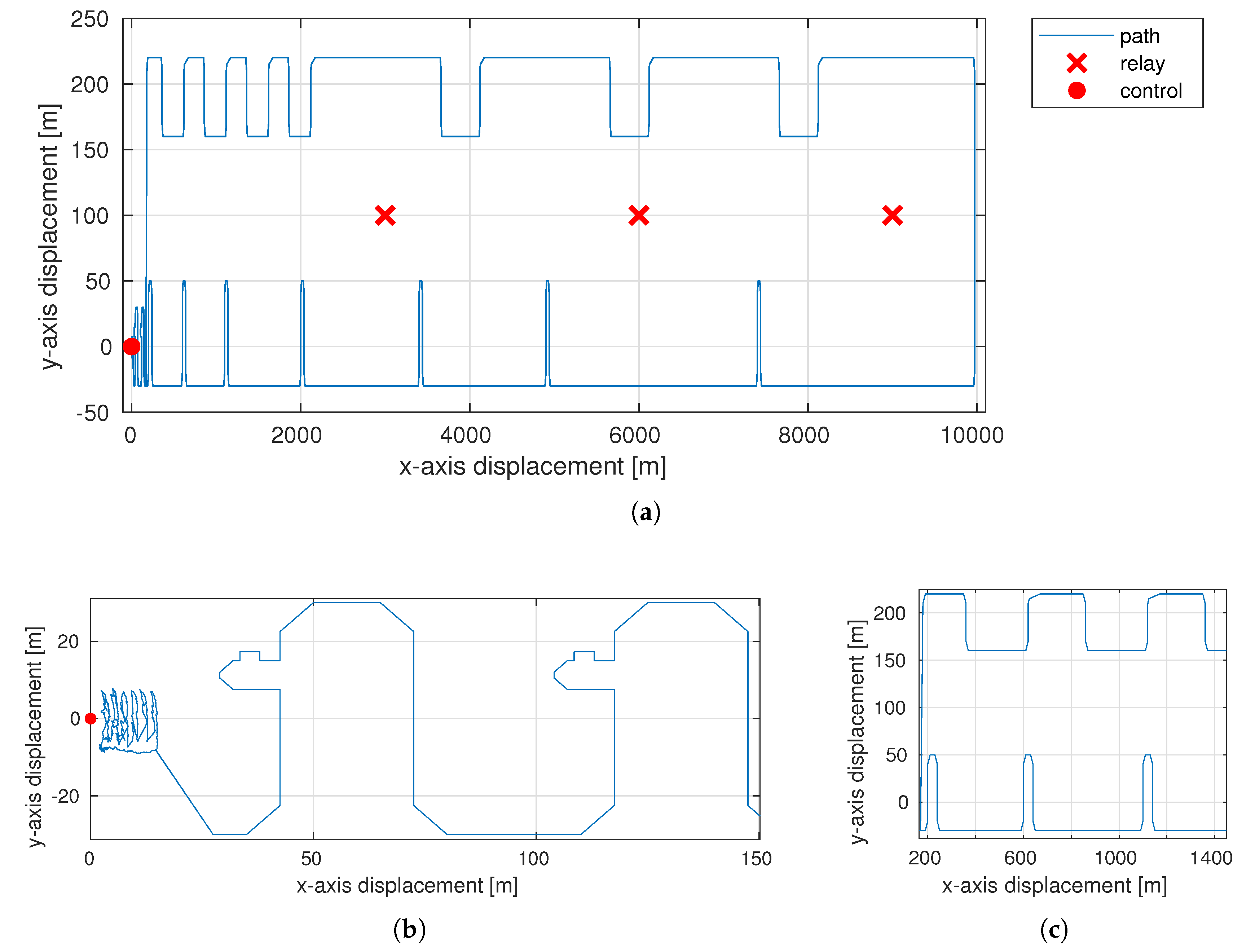
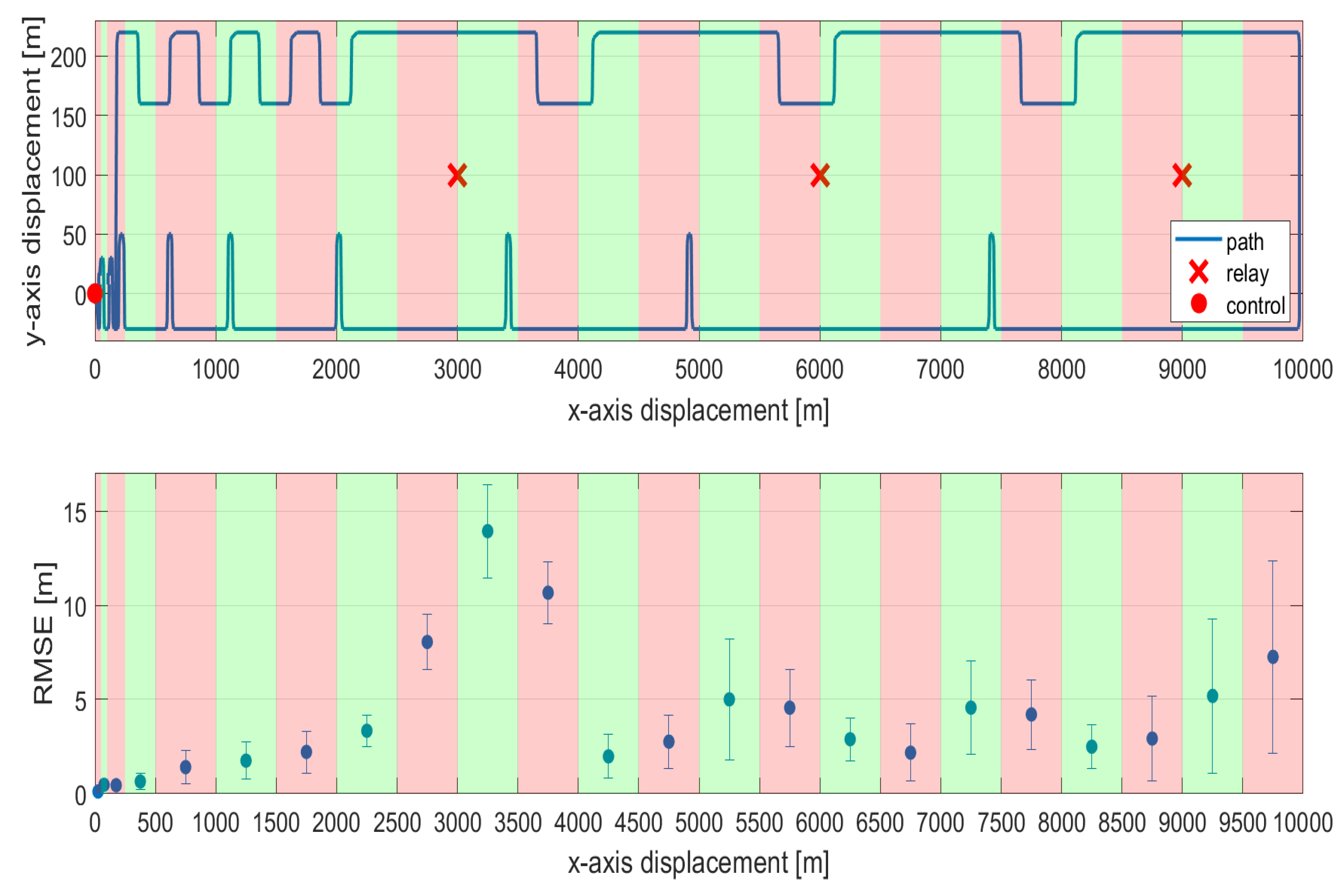
4.3. Nodes Deployment, Position Control, and Path
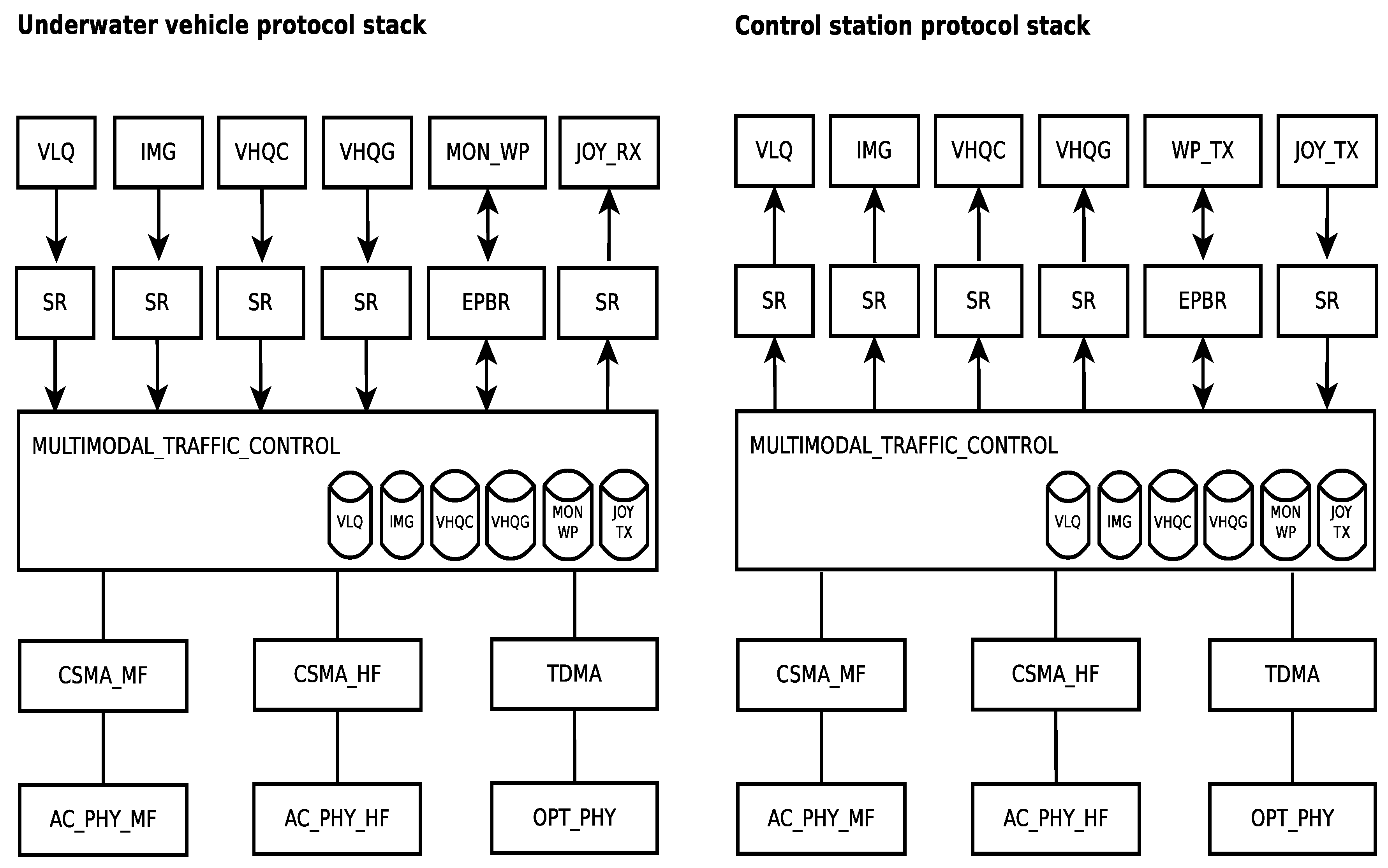
- JOY_TX, used to transmit the joystick control packet;
- WP_TX, used to transmit the way-point control packets.
4.4. Application Layers On-Board the Underwater Vehicle
- MON_WP, a periodic application layer used to transmit monitoring packets with a size of 56 bytes every 6 seconds. This application layer also receives the way-point packets transmitted by the WP_TX application layer presented in Section 4.3 and sets the next way-point of the underwater vehicle accordingly.
- JOY_RX, an application layer used to receive the joystick position control by the JOY_TX application layer presented in Section 4.3 and to move the underwater vehicle accordingly.
- IMG, an application layer generating sporadic 4160 × 2336 pixel JPEG images with a size of 2.5 Megabytes, divided in packets with size 2 kilobytes. The images are generated on average every 1800 s according to a Poisson process.
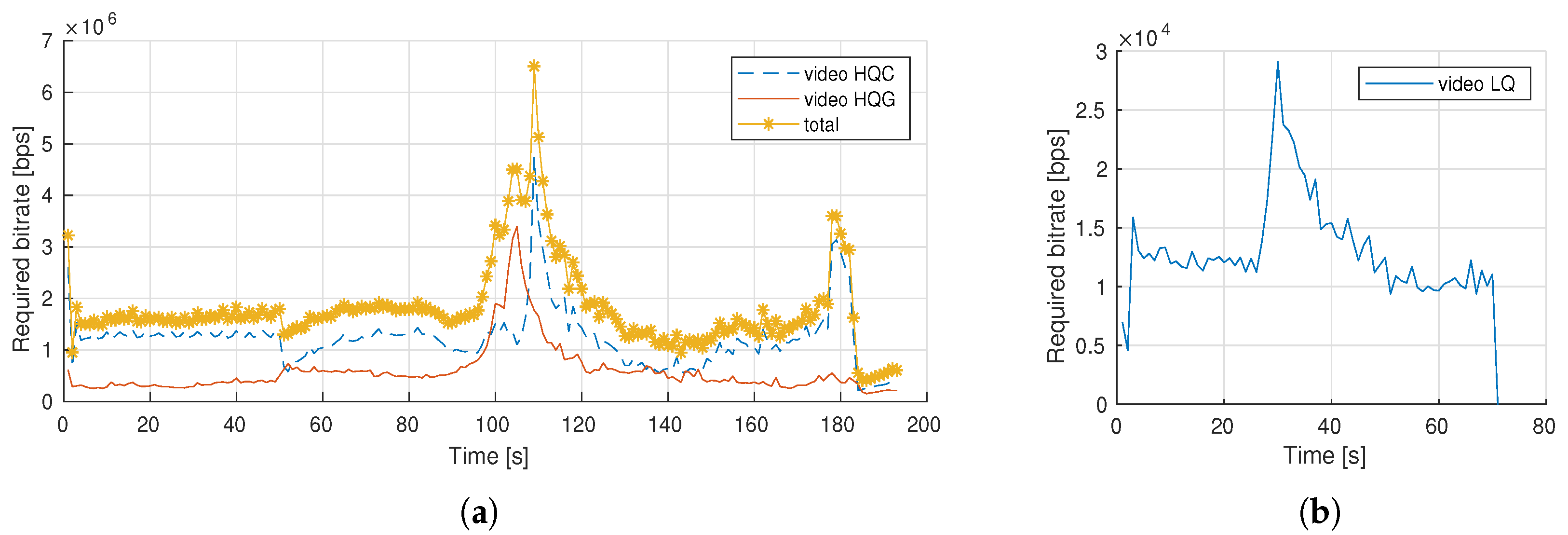
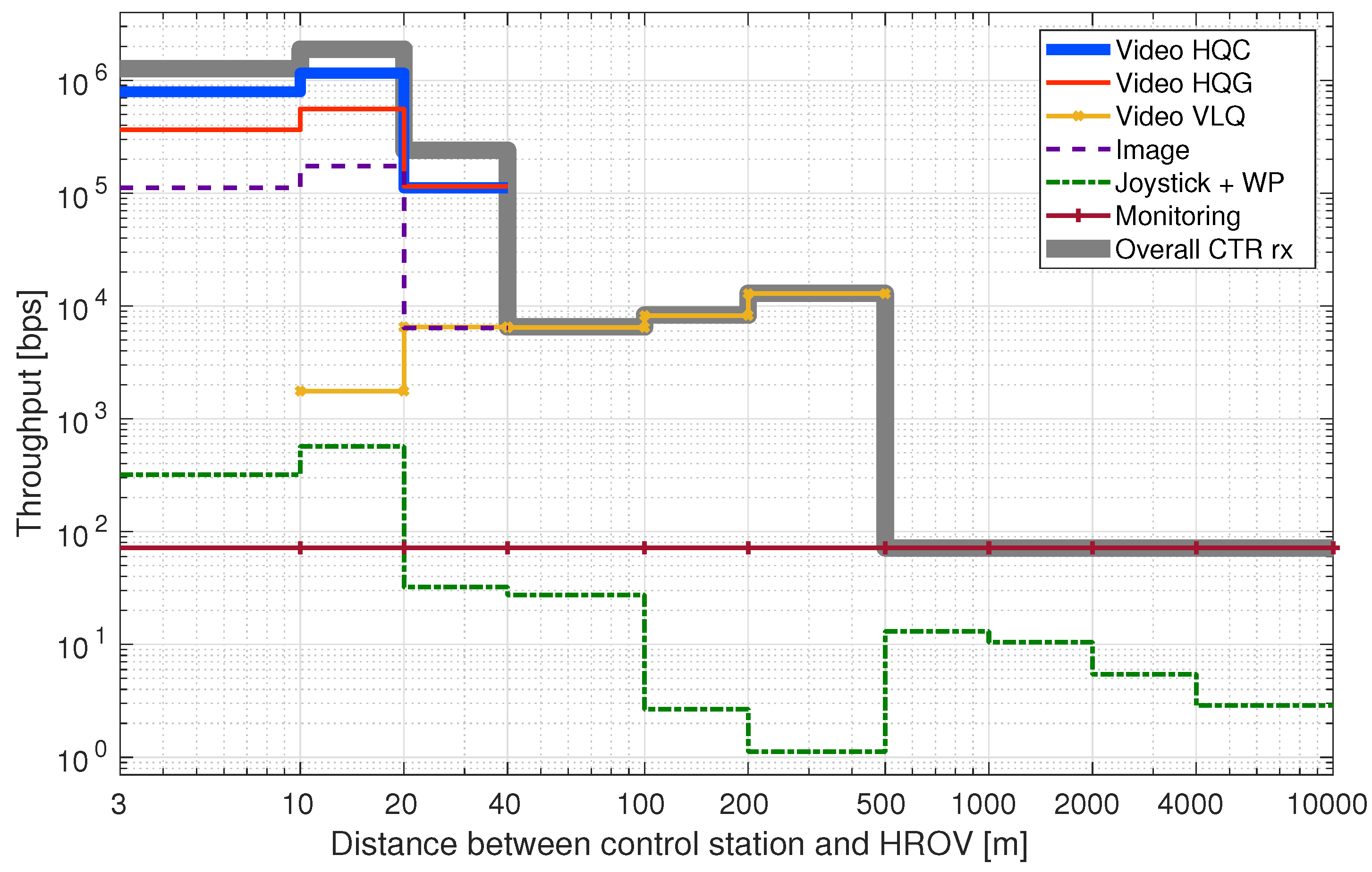
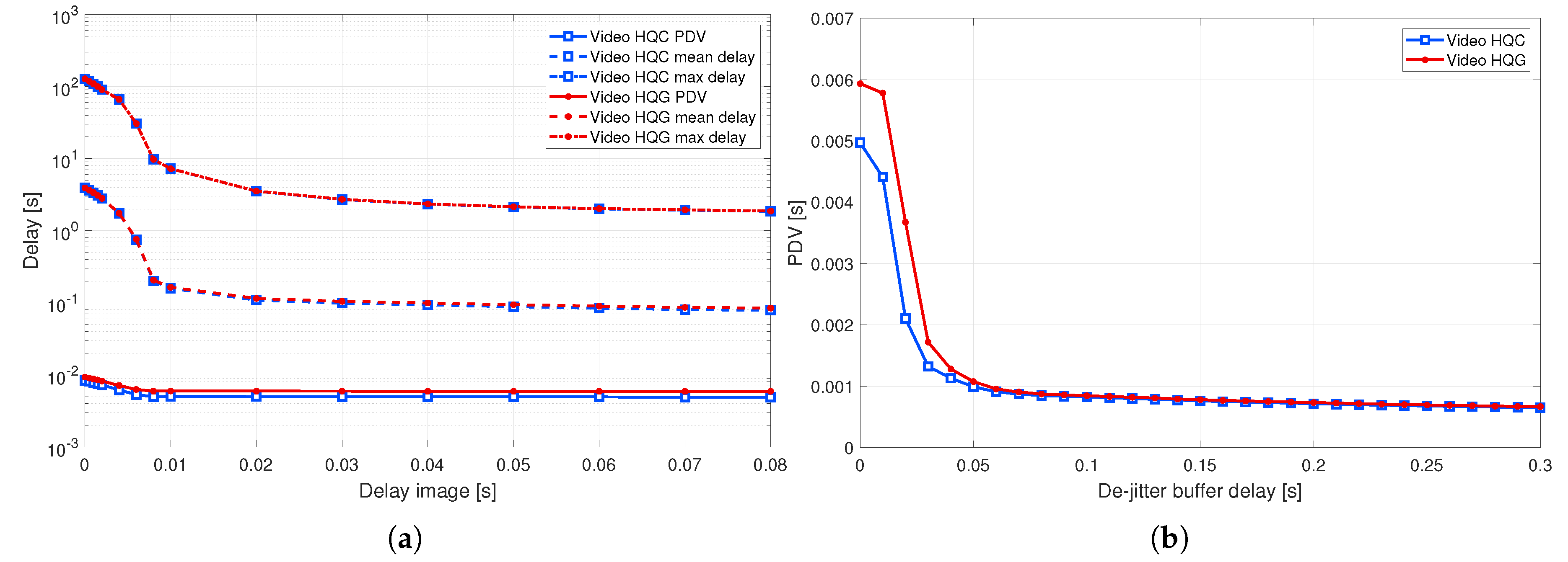
- VHQC, an application layer transmitting a high-quality real-time video stream, with an average bit rate of 1.3 Mbps. The packets were generated according to a 705 × 576 px at 25 fps video file with the instantaneous bit rate depicted in Figure 7a: in our simulation setup, each packet contained a frame, and the transmission period was 0.04 s.
- VHQG, an application layer transmitting a high-quality grey-scale real-time video stream, with average bit rate 0.6 Mbps. The packets were generated according to a 705 × 576 px at 25 fps video with the instantaneous bit rate depicted in Figure 7a: in our simulation setup, each packet contained a frame, and the transmission period was 0.04 s.
- VLQ, an application layer transmitting a very low-quality low-rate video, with average bit rate of 13.68 kbps. The packets were generated according to a 200 × 96 px at 5 fps video file with the instantaneous bit rate depicted in Figure 7b: in our simulation setup, each packet contained a frame, and the transmission period was 0.2 s.
4.5. Routing Protocols
4.6. Multimodal Layer
5. Simulation Results
5.1. Joystick and Way-Point Position Control
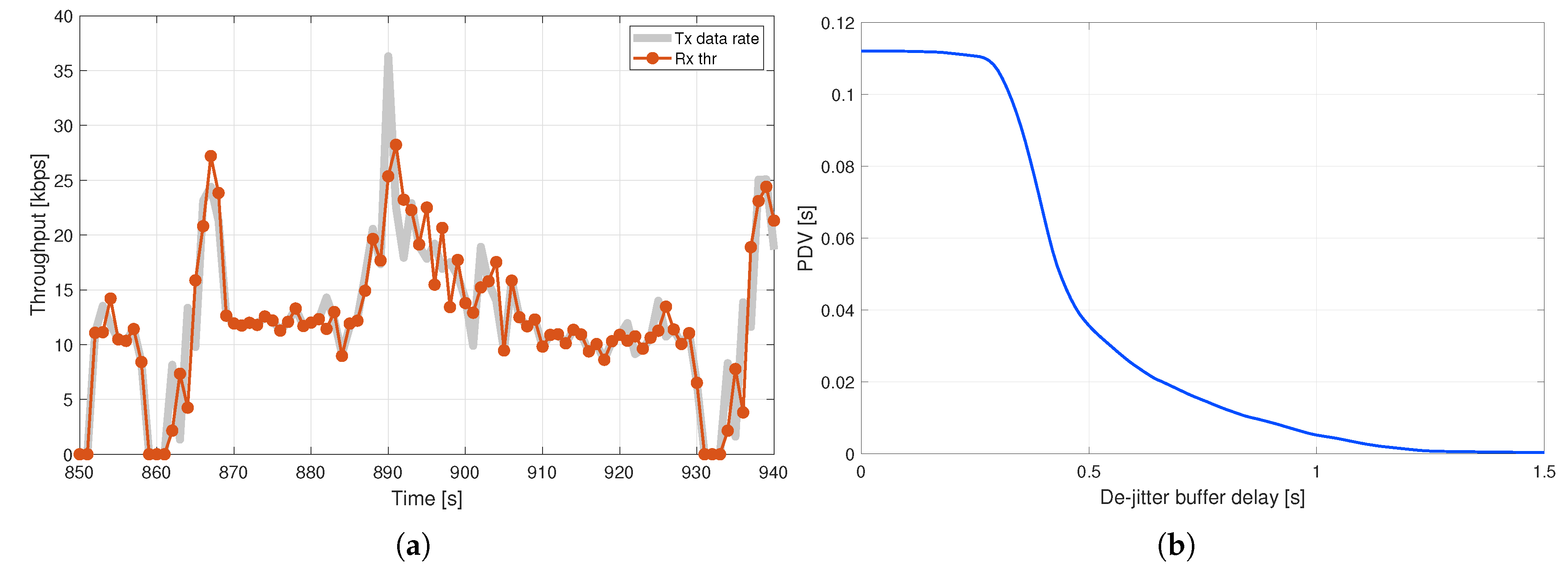
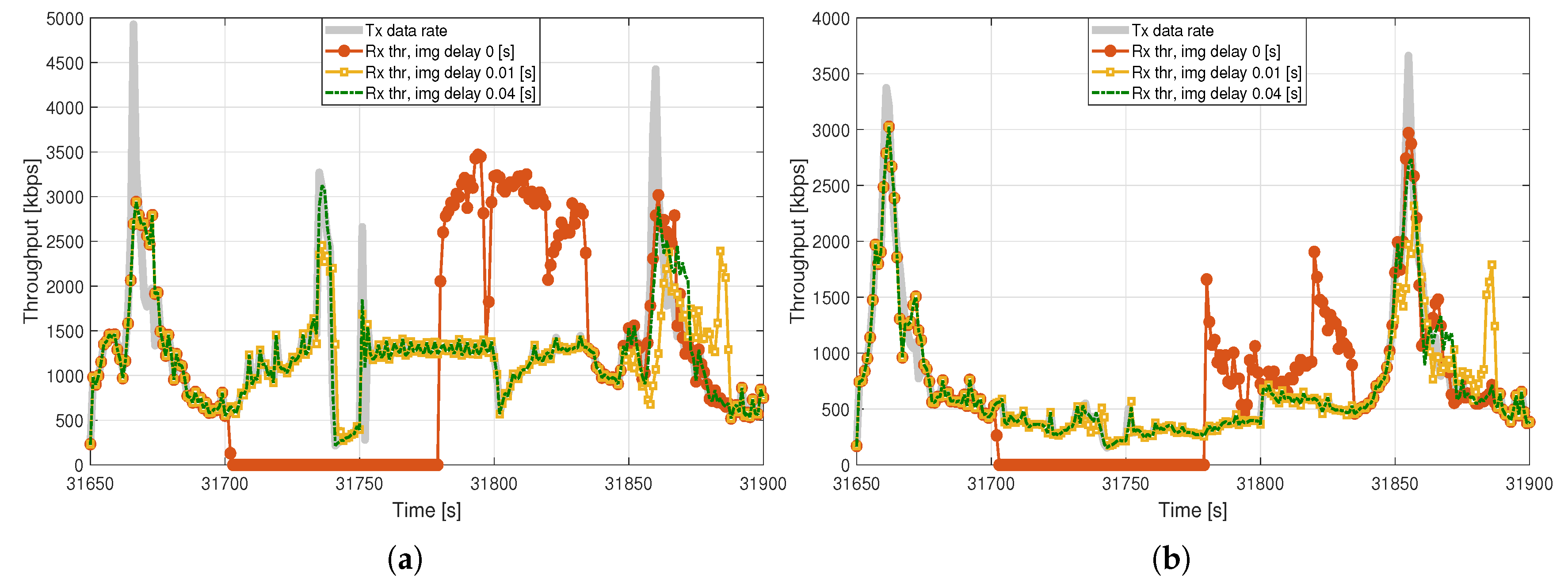
5.2. Video and Images: Traffic Shaping and Video De-Jittering Buffer
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Capocci, R.; Dooly, G.; Omerdic, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-Class Remotely Operated Vehicles-A Review. J. Mar. Sci. Eng. 2017, 5, 13. [Google Scholar] [CrossRef]
- Kraken Seavision. Available online: https://krakenrobotics.com/products/seavision/ (accessed on 21 September 2020).
- Campagnaro, F.; Francescon, R.; Casari, P.; Diamant, R.; Zorzi, M. Multimodal Underwater Networks: Recent Advances and a Look Ahead. In Proceedings of International Conference on Underwater Networks & Systems; Association for Computing Machinery, New York, NY, USA, 2017. [Google Scholar]
- Wireless For Subsea Seatooth. Available online: https://www.wfs-tech.com/product/seatooth/ (accessed on 21 September 2020).
- Ardelt, G.; Mackenberg, M.; Markmann, J.; Esemann, T.; Hellbruck, H. A Flexible and Modular Platform for Development of Short-Range Underwater Communication. In Proceedings of the 11th ACM International Conference on Underwater Networks & Systems, Shanghai, China, 24–26 October 2016. [Google Scholar]
- Inacio, S.I.; Pereira, M.R.; Santos, H.M.; Pessoa, L.M.; Teixeira, F.B.; Lopes, M.J.; Aboderin, O.; Salgado, H.M. Dipole Antenna for Underwater Radio Communications. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016. [Google Scholar]
- Sonardyne BlueComm Optical Modem. Available online: https://www.sonardyne.com/product-category/wireless-communications/very-high-data-rate/ (accessed on 21 September 2020).
- Caiti, A.; Ciaramella, E.; Conte, G.; Cossu, G.; Costa, D.; Grechi, S.; Nuti, R.; Scaradozzi, D.; Sturniolo, A. OptoCOMM: Introducing a new optical underwater wireless communication modem. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016. [Google Scholar]
- AQUAmodem Op1 Optical Modem Page. Available online: http://www.aquatecgroup.com/aquamodem/aquamodem-op1 (accessed on 21 September 2020).
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. ACM Mob. Comput. Commun. Rev. 2007, 11, 34–43. [Google Scholar] [CrossRef]
- Develogic Subsea Systems. Available online: http://www.develogic.de/ (accessed on 21 September 2020).
- Freitag, L.; Grund, M.; Singh, S.; Partan, J.; Koski, P.; Ball, K. The WHOI Micro-Modem: An Acoustic Communications and Navigation System for Multiple Platforms. 2005. Available online: http://www.whoi.edu (accessed on 21 September 2020).
- Bowen, A.D.; Jakuba, M.V.; Farr, N.E.; Ware, J.; Taylor, C.; Gomez-Ibanez, D.; Machado, C.R.; Pontbriand, C. An Un-Tethered ROV for Routine Access and Intervention in the Deep Sea. In Proceedings of the 2013 Oceans-San Diego, San Diego, CA, USA, 21–25 October 2013. [Google Scholar]
- Campagnaro, F.; Guerra, F.; Favaro, F.; Calzado, V.S.; Forero, P.; Zorzi, M.; Casari, P. Simulation of a Multimodal Wireless Remote Control System for Underwater Vehicles. In Proceedings of the 10th International Conference on Underwater Networks & Systems, Washington, DC, USA, 22–24 October 2015. [Google Scholar]
- Signori, A.; Campagnaro, F.; Zorzi, M. Multi-Hop Range Extension of a Wireless Remote Control for Underwater Vehicles. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Tena, I. Navigating Underwater Autonomy. ROV Planet Mag. 2020, 1, 8037–8051. Available online: https://issuu.com/rovplanet/docs/rovplanet_magazine_022__web_ (accessed on 21 September 2020).
- Maslin, E. Winning the subsea space race. IET Eng. Technol. 2020, 15, 8037–8051. [Google Scholar]
- Diamant, R.; Campagnaro, F.; De Grazia, M.D.F.; Casari, P.; Testolin, A.; Calzado, V.S.; Zorzi, M. On the Relationship between the Underwater Acoustic and Optical Channels. IEEE Trans. Wirel. Commun. 2017, 16, 8037–8051. [Google Scholar] [CrossRef]
- Sani, M.I.; Siregar, S.; Kurniawan, A.P.; Irwan, M.A. FIToplankton: Wireless Controlled Remotely-operated Underwater Vehicle (ROV) for Shallow Water Exploration. Int. J. Electr. Comput. Eng. (IJECE) 2018, 8, 3325–3332. [Google Scholar] [CrossRef]
- Cruz, N.A.; Ferreira, B.M.; Kebkal, O.; Matos, A.C.; Petrioli, C.; Petroccia, R.; Spaccini, D. Investigation of Underwater Acoustic Networking Enabling the Cooperative Operation of Multiple Heterogeneous Vehicles. Mar. Technol. Soc. J. 2013, 47, 43–58. [Google Scholar] [CrossRef][Green Version]
- Centelles, D.; Soriano, A.; Marin, R.; Sanz, P.J. Wireless HROV Control with Compressed Visual Feedback Using Acoustic and RF Links. J. Intell. Robot. Syst. 2020, 99, 713–728. [Google Scholar] [CrossRef]
- BlueROV2. Available online: https://bluerobotics.com/store/rov/bluerov2/ (accessed on 21 September 2020).
- Ali, M.F.; Perera, T.D.P.; Morapitiya, S.S.; Jayakody, D.N.K.; Panic, S.; Garg, S. A Hybrid RF/FSO and Underwater VLC Cooperative Relay Communication System. In Proceedings of the 14th International Forum on Strategic Technology (IFOST-2019), Tomsk, Russia, 14–17 October 2019. [Google Scholar]
- EXRAY. Available online: https://www.hydromea.com/exray-wireless-underwater-drone/ (accessed on 21 September 2020).
- LUMA. Available online: https://www.hydromea.com/underwater-wireless-communication/ (accessed on 21 September 2020).
- Miller, N. An Underwater Communication System. IEEE IRE Trans. Commun. Syst. 1959, 7, 249–251. [Google Scholar] [CrossRef]
- Porter, M. Bellhop Code. Available online: http://oalib.hlsresearch.com/Rays/index.html (accessed on 21 September 2020).
- Teledyne-Benthos Acoustic Modems. Available online: http://www.teledynemarine.com/acoustic-modems/ (accessed on 21 September 2020).
- Underwater Acoustic Modems. Available online: https://evologics.de/acoustic-modems (accessed on 21 September 2020).
- AQUASENT Acoustic Modems. Available online: http://www.aquasent.com/acoustic-modems/ (accessed on 21 September 2020).
- LinkQuest Underwater Acoustic Modems. Available online: http://www.link-quest.com/html/models1.htm (accessed on 21 September 2020).
- Communication Design. Available online: http://www.aquatecgroup.com/19-solutions/107-communication-design (accessed on 21 September 2020).
- MATS 3G multi-modulation acoustic telemetry system. Available online: http://www.sercel.com/products/Pages/mats3g.aspx (accessed on 21 September 2020).
- Modems for Underwater Communication. Available online: https://www.kongsberg.com/maritime/products/Acoustics-Positioning-and-Communication/modems/ (accessed on 21 September 2020).
- Freitag, L.; Ball, K.; Partan, J.; Koski, P.; Singh, S. Long range acoustic communications and navigation in the Arctic. In Proceedings of the OCEANS 2015-MTS/IEEE Washington, Washington DC, USA, 19–22 October 2015. [Google Scholar]
- Popoto Modem. Available online: http://popotomodem.com/ (accessed on 21 September 2020).
- Cario, G.; Casavola, A.; Lupia, M.; Rosace, C. SeaModem: A Low-Cost Underwater Acoustic Modem for Shallow Water Communication. In Proceedings of the OCEANS 2015-Genova, Genova, Italy, 19–22 October 2015. [Google Scholar]
- Sonardyne. Underwater Acoustic Modem 6. Available online: https://www.sonardyne.com/product/underwater-acoustic-modems/ (accessed on 21 September 2020).
- Low Cost Underwater Acoustic modem for Makers of Underwater Things and OEMs! Available online: https://dspcommgen2.com/news-flash-low-cost-acoustic-modems-and-transducers-available-for-sale-now/ (accessed on 21 September 2020).
- Subnero. Available online: https://subnero.com/ (accessed on 21 September 2020).
- SeaTrac Technology. Available online: https://www.blueprintsubsea.com/seatrac/technology.php (accessed on 21 September 2020).
- Shimura, T.; Kida, Y.; Deguchi, M. High-rate acoustic communication at the data rate of 69 kbps over the range of 3600 m developed for vertical uplink communication. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019. [Google Scholar]
- Binnerts, B.; Mulders, I.; Blom, K.; Colin, M.; Dol, H. Development and demonstration of a live data streaming capability using an underwater acoustic communication link. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Otnes, R.; Locke, J.; Komulainen, A.; Blouin, S.; Clark, D.; Austad, H.; Eastwood, J. Dflood network protocol over commercial modems. In Proceedings of the 2018 Fourth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 28–30 August 2018. [Google Scholar]
- Dol, H.; Colin, M.; van Walree, P.; Otnes, R. Field experiments with a dual-frequency-band underwater acoustic network. In Proceedings of the 2018 Fourth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 28–30 August 2018. [Google Scholar]
- Underwater Communication Systems. Available online: https://www.wartsila.com/marine/build/sonars-naval-acoustics/underwater-communication-systems (accessed on 21 September 2020).
- L3HARRIS. Available online: https://www2.l3t.com/oceania/ (accessed on 21 September 2020).
- Tapparello, C.; Casari, P.; Toso, G.; Calabrese, I.; Otnes, R.; van Walree, P.; Goetz, M.; Nissen, I.; Zorzi, M. Performance Evaluation of Forwarding Protocols for the RACUN Network. In Proceedings of the Eighth ACM International Conference on Underwater Networks and Systems, Kaohsiung, Taiwan, 11–13 November 2013. [Google Scholar]
- Potter, J.; Alves, J.; Green, D.; Zappa, G.; Nissen, I.; McCoy, K. The JANUS underwater communications standard. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Lerici, Italy, 3–5 September 2014. [Google Scholar]
- Sherlock, B.; Neasham, J.A.; Tsimenidis, C.C. Implementation of a spread-spectrum acoustic modem on an android mobile device. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017. [Google Scholar]
- Morozs, N.; Mitchell, P.D.; Zakharov, Y.; Mourya, R.; Petillot, Y.R.; Gibney, T.; Dragone, M.; Sherlock, B.; Neasham, J.A.; Tsimenidis, C.C.; et al. Robust TDA-MAC for practical underwater sensor network deployment: Lessons from USMART sea trials. In Proceedings of the Thirteenth ACM International Conference on Underwater Networks & Systems, Shenzhen, China, 3–5 December 2018. [Google Scholar]
- Benson, B.; Li, Y.; Faunce, B.; Domond, K.; Kimball, D.; Schurgers, C.; Kastner, R. Design of a Low-Cost Underwater Acoustic Modem. IEEE Embed. Syst. Lett. 2010, 2, 58–61. [Google Scholar] [CrossRef]
- Tritech Micron Modem—Acoustic Modem. Available online: https://www.tritech.co.uk/product/micron-data-modem (accessed on 21 September 2020).
- Desert Star Systems. SAM-1 Technical Reference Manual. Available online: https://desertstarsystems.nyc3.digitaloceanspaces.com/Manuals/SAM-1TechnicalReferenceManual.pdf (accessed on 21 September 2020).
- DiveNET: Sealink. Available online: https://www.divenetgps.com/sealink (accessed on 21 September 2020).
- Renner, B.C.; Heitmann, J.; Steinmetz, F. ahoi: Inexpensive, Low-power Communication and Localization for Underwater Sensor Networks and AUVs. ACM Trans. Sens. Networks 2020, 16, 1–46. [Google Scholar] [CrossRef]
- Water Linked Modem M64. Available online: https://waterlinked.com/product/modem-m64/ (accessed on 21 September 2020).
- Sanchez, A.; Blanc, S.; Yuste, P.; Perles, A.; Serrano, J.J. An Ultra-Low Power and Flexible Acoustic Modem Design to Develop Energy-Efficient Underwater Sensor Networks. Sensors 2012, 12, 6837–6856. [Google Scholar] [CrossRef] [PubMed]
- Pelekanakis, C.; Stojanovic, M.; Freitag, L. High rate acoustic link for underwater video transmission. In Proceedings of the MTS/IEEE OCEANS, San Diego, CA, USA, 22–26 September 2003. [Google Scholar]
- Riedl, T.; Singer, A. Towards a Video-Capable Wireless Underwater Modem: Doppler Tolerant Broadband Acoustic Communication. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Lerici, Italy, 3–5 September 2014. [Google Scholar]
- Campagnaro, F.; Francescon, R.; Tronchin, D.; Zorzi, M. On the Feasibility of Video Streaming through Underwater Acoustic Links. In Proceedings of the 2018 Fourth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 28–30 August 2018. [Google Scholar]
- Rahmati, M.; Gurney, A.; Pompili, D. Adaptive Underwater Video Transmission via Software-Defined MIMO Acoustic Modems. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018. [Google Scholar]
- Kebkal, O.; Komar, M.; Kebkal, K. D-MAC: Hybrid Media Access Control for Underwater Acoustic Sensor Networks. In Proceedings of the 2010 IEEE International Conference on Communications Workshops, Cape Town, South Africa, 23–27 May 2010. [Google Scholar]
- Beaujean, P.P.; Spruance, J.; Carlson, E.A.; Kriel, D. HERMES—A high-speed acoustic modem for real-time transmission of uncompressed image and status transmission in port environment and very shallow water. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar]
- Demirors, E.; Shankar, B.G.; Santagati, G.E.; Melodia, T. SEANet: A Software-Defined Acoustic Networking Framework for Reconfigurable Underwater Networking. In Proceedings of the 10th International Conference on Underwater Networks & Systems, Washington DC, USA, 22–24 October 2015. [Google Scholar]
- Underwater Wireless Acoustic Video Communications Channel. Available online: http://www.baltrobotics.com/index.php/products-services-mnu/item/269-underwater-wireless-acoustic-video-communications-channel (accessed on 21 September 2020).
- Robust and Reliable, Broadband Underwater Acoustic Communications. Available online: http://marecomms.ca/index.html (accessed on 21 September 2020).
- Singh, S.; Webster, S.E.; Freitag, L.; Whitcomb, L.L.; Ball, K.; Bailey, J.; Taylor, C. Acoustic communication performance of the WHOI Micro-Modem in sea trials of the Nereus vehicle to 11,000 m depth. In Proceedings of the OCEANS, Biloxi, MS, USA, 26–29 October 2009. [Google Scholar]
- Aquatec Group. Available online: http://www.aquatecgroup.com/ (accessed on 21 September 2020).
- Signori, A.; Campagnaro, F.; Zorzi, M. Modeling the Performance of Optical Modems in the DESERT Underwater Network Simulator. In Proceedings of the 2018 Fourth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 28–30 August 2018. [Google Scholar]
- Hanson, F.; Radic, S. High bandwidth underwater optical communication. Appl. Opt. 2008, 47, 277–283. [Google Scholar] [CrossRef] [PubMed]
- Doniec, M.; Xu, A.; Rus, D. Robust Real-Time Underwater Digital Video Streaming using Optical Communication. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6-10 May 2013. [Google Scholar]
- Khalighi, M.A.; Hamza, T.; Bourennane, S.; Léon, P.; Opderbecke, J. Underwater Wireless Optical Communications Using Silicon Photo-Multipliers. IEEE Photonics J. 2017, 9, 1–14. [Google Scholar] [CrossRef]
- Release of MC100 Underwater Optical Wireless Communication Modem. Available online: https://www.shimadzu.com/news/g16mjizzgbhz3--y.html (accessed on 21 September 2020).
- Sonardyne Bluecomm Underwater Wireless Optical Communication System. Available online: https://www.sonardyne.com/app/uploads/2016/06/BlueComm.pdf (accessed on 21 September 2020).
- Liu, X.; Yi, S.; Zhou, X.; Fang, Z.; Qiu, Z.J.; Hu, L.; Cong, C.; Zheng, L.; Liu, R.; Tian, P. 34.5 m underwater optical wireless communication with 2.70 Gbps data rate based on a green laser diode with NRZ-OOK modulation. Opt. Express 2017, 25, 27937–27947. [Google Scholar] [CrossRef]
- Wang, J.; Lu, C.; Li, S.; Xu, Z. 100 m/500 Mbps underwater optical wireless communication using an NRZ-OOK modulated 520 nm laser diode. Opt. Express 2019, 27, 12171–12181. [Google Scholar] [CrossRef]
- ULTRA Subsea High-Bandwith Comms. Available online: http://www.oceanit.com/products/ultra (accessed on 21 September 2020).
- Study of Adaptive Underwater Optical Wireless Communication with Photomultiplier Tube Suruga Bay. Available online: http://www.godac.jamstec.go.jp/catalog/data/doc_catalog/media/KR17-11_leg2_all.pdf (accessed on 21 September 2020).
- Optical Communications. Available online: https://www.saphotonics.com/communications-sensing/optical-communications/ (accessed on 21 September 2020).
- Campagnaro, F.; Calore, M.; Casari, P.; Calzado, V.S.; Cupertino, G.; Moriconi, C.; Zorzi, M. Measurement-based Simulation of Underwater Optical Networks. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–20 June 2017. [Google Scholar]
- About Penguin Automated Systems. Available online: http://www.penguinasi.com/ (accessed on 21 September 2020).
- Baiden, G.; Bissiri, Y. High Bandwidth Optical Networking for Underwater Untethered TeleRobotic Operation. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007. [Google Scholar]
- Gois, P.; Sreekantaswamy, N.; Basavaraju, N.; Rufino, M.; Botelho, L.S.J.; Gomes, J.; Pascoal, A. Development and Validation of Blue Ray, an Optical Modem for the MEDUSA class AUVs. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016. [Google Scholar]
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A Survey of Underwater Optical Wireless Communications. IEEE Commun. Surv. Tutorials 2017, 19, 204–238. [Google Scholar] [CrossRef]
- IMM (Inductive Modem Module). Available online: https://www.seabird.com/communications/imm-inductive-modem-module/family?productCategoryId=54627870427 (accessed on 21 September 2020).
- RBR Inductive Modem. Available online: https://rbr-global.com/products/systems/inductive-modem (accessed on 21 September 2020).
- Ulti-modem Underwater Inductive Modem. Available online: https://www.soundnine.com/inductive-modems/ (accessed on 21 September 2020).
- Diamant, R.; Campagnaro, F.; Dahan, S.; Francescon, R.; Zorzi, M. Development Of A Submerged Hub For Monitoring The Deep Sea. In Proceedings of the UACE2017, Skiathos, Greece, 3–8 September 2017. [Google Scholar]
- Inductive Modems on Ice. Available online: https://www.nortekgroup.com/assets/documents/Nortek-Aquadopp-and-Ross-Ice-Shelf-research-Eco-Magazine-March-2019.pdf (accessed on 21 September 2020).
- WFS Seatooth Mark IV. Available online: https://www.sut.org/wp-content/uploads/2015/09/Brendan-Hyland-v-3-Subsea-Control-Down-Under-Subsea-Internet-of-Things-final-v2.pdf (accessed on 21 September 2020).
- WiSub Maelstrom. Available online: http://www.wisub.com/products/maelstrom/ (accessed on 21 September 2020).
- Power and Communication—Electrical Interfaces. Available online: https://www.bluelogic.no/products/electrical-interfaces (accessed on 21 September 2020).
- Hobson, B.W.; McEwen, R.S.; Erickson, J.; Hoover, T.; McBride, L.; Shane, F.; Bellingham, J.G. The Development and Ocean Testing of an AUV Docking Station for a 21” AUV. In Proceedings of the IEEE/OES Oceans, Vancouver, BC, Canada, 18–21 June 2007. [Google Scholar]
- Ahmed, N.; Hoyt, J.; Radchenko, A.; Pommerenke, D.; Zheng, Y.R. A multi-coil Magneto-Inductive transceiver for low-cost wireless sensor networks. In Proceedings of the UComms, Sestri Levante, Italy, 3–5 September 2014. [Google Scholar]
- Bousquet, J.F.; Dobbin, A.A.; Wang, Y. A Compact Low-Power Underwater Magneto-Inductive Modem. In Proceedings of the ACM WUWNet, Shanghai, China, 24–26 October 2016. [Google Scholar]
- Ahmed, N.; Radchenko, A.; Pommerenke, D.; Zheng, Y.R. Design and Evaluation of Low-Cost and Energy-Efficient Magneto-Inductive Sensor Nodes for Wireless Sensor Networks. IEEE Syst. J. 2019, 131, 1135–1144. [Google Scholar] [CrossRef]
- Sojdehei, J.J.; Wrathall, P.N.; Dinn, D.F. Magneto-inductive (MI) communications. MTS/IEEE Oceans 2001. An Ocean Odyssey. In Proceedings of the Conference Proceedings (IEEE Cat. No.01CH37295), Honolulu, HI, USA, 5–8 November 2001. [Google Scholar]
- Communication with Submarines. Available online: https://en.wikipedia.org/wiki/Communication_with_submarines (accessed on 21 September 2020).
- World Heritage Grimeton Radio Station. Available online: https://grimeton.org/?lang=en (accessed on 21 September 2020).
- The World’s Largest ‘Radio’ Station. Available online: https://pages.hep.wisc.edu/~prepost/ELF.pdf (accessed on 21 September 2020).
- Extremely Low Frequency Transmitter Site Clam Lake, Wisconsin. Available online: https://fas.org/nuke/guide/usa/c3i/fs_clam_lake_elf2003.pdf (accessed on 21 September 2020).
- ZEVS, The Russian 82 Hz Elf Transmitter. Available online: http://www.vlf.it/zevs/zevs.htm (accessed on 21 September 2020).
- Vickery, K. Acoustic positioning systems. A practical overview of current systems. In Proceedings of the 1998 Workshop on Autonomous Underwater Vehicles (Cat. No.98CH36290), Cambridge, MA, USA, 20–21 August 1998. [Google Scholar]
- USBL Positioning Systems. Available online: https://www.ixblue.com/products/range/usbl-positioning-systems (accessed on 21 September 2020).
- Coccolo, E.; Campagnaro, F.; Signori, A.; Favaro, F.; Zorzi, M. Implementation of AUV and Ship Noise for Link Quality Evaluation in the DESERT Underwater Framework. In Proceedings of the Thirteenth ACM International Conference on Underwater Networks & Systems, WUWNet ’18, Shenzhen, China, 3–5 December 2018. [Google Scholar]
- Fraunhofer CML. Available online: https://www.cml.fraunhofer.de/en.html (accessed on 21 September 2020).
- RoboVaaS Robotic Vessels as-a-Service. Available online: https://www.martera.eu/projects/robovaas (accessed on 21 September 2020).
- Centre for Robotics and Intelligent Systems. Available online: www.cris.ul.ie (accessed on 21 September 2020).
- WET Labs. Available online: https://www.comm-tec.com/Prods/mfgs/WetLabs_Prods.html (accessed on 21 September 2020).
- EM 2040P MKII Multibeam Echo Sounder. Available online: https://www.kongsberg.com/maritime/products/mapping-systems/multibeam-echo-sounders/em-2040p-mkii-multibeam-echosounder-max.-550-m (accessed on 21 September 2020).
- Available online: https://www.qstar.eu/ageotec-rov (accessed on 21 September 2020).
- Murthy, C.S.R.; Manimaran, G. Resource Management in Real-time Systems and Networks; The MIT Press: Cambridge, MA, USA, 2001; p. 205. [Google Scholar]
- Demichelis, C.; Chimento, P. IP Packet Delay Variation Metric for IP Performance Metrics (IPPM); RFC 3393; IETF: Fremont, CA, USA, 2002. [Google Scholar]
- Fouladi, S.; Emmons, J.; Orbay, E.; Wu, C.; Wahby, R.S.; Winstein, K. Salsify: Low-Latency Network Video through Tighter Integration between a Video Codec and a Transport Protocol. In Proceedings of the 15th USENIX Symposium on Networked Systems Design and Implementation (NSDI 18), Renton, WA, USA, 9–11 April 2018; pp. 267–282. [Google Scholar]
- Dong, J. Network Dictionary; Javvin Technologies Inc.: Silicon Valley, CA, USA, 2007; p. 268. [Google Scholar]
- Campagnaro, F.; Francescon, R.; Guerra, F.; Favaro, F.; Casari, P.; Diamant, R.; Zorzi, M. The DESERT Underwater Framework v2: Improved Capabilities and Extension Tools. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August 30–1 September 2016. [Google Scholar]
- Campagnaro, F.; Favaro, F.; Casari, P.; Zorzi, M. On the Feasibility of Fully Wireless Remote Control for Underwater Vehicles. In Proceedings of the 2014 48th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 2–5 November 2014. [Google Scholar]
- Odetti, A.; Bibuli, M.; Bruzzone, G.; Caccia, M.; Spirandelli, E.; Bruzzone, G. e-URoPe: A reconfgurable AUV/ROV for man-robot underwater cooperation. IFAC-PapersOnLine 2017, 50, 11203–11208. [Google Scholar] [CrossRef]
- Ferretti, R.; Bibuli, M.; Caccia, M.; Chiarella, D.; Odetti, A.; Zereik, E.; Bruzzone, G. Towards Posidonia Meadows Detection, Mapping and Automatic recognition using Unmanned Marine Vehicles. IFAC-PapersOnLine 2017, 50, 12386–12391. [Google Scholar] [CrossRef]
- Bibuli, M.; Zereik, E.; Bruzzone, G.; Caccia, M.; Ferretti, R.; Odetti, A. Practical Experience towards Robust Underwater Navigation. IFAC-PapersOnLine 2018, 51, 281–286. [Google Scholar] [CrossRef]
- Campagnaro, F.; Guerra, F.; Diamant, R.; Casari, P.; Zorzi, M. Implementation of a Multimodal Acoustic-Optic Underwater Network Protocol Stack. In Proceedings of the 11th ACM International Conference on Underwater Networks & Systems, Shanghai, China, 10–13 April 2016. [Google Scholar]
| 1. | An ROV pilot technician controls the movement of the vehicle from a ship’s cabin or another indoor location on the surface. |
| 2. | In this paper, we consider only acoustic modems with an omnidirectional beam pattern, as we do not know the ROV trajectory in advance. |














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer and Model | Max Range | Bit Rate | |
|---|---|---|---|
| LF | Sercel MATS3G 12 kHz [33] | 15 km | {20, 200} bps secure data with coding, {0.8, 7.4} kbps high rate with no coding |
| EvoLogics S2C R 7/17 [29] | 7 km | {1, 7} kbps raw bit rate with no coding, {0.6, 4} kbps net data rate with coding | |
| WHOI MicroModem [12] | [6, 11] km | {0.2, 5.4} kbps in vertical links [68] | |
| LinkQuest UWM10000 [31] | 7 km | 5 kbps raw bit rate, 2 kbps payload data rate | |
| Kongsberg cNODE LF [34] | few kms | up to 4.5 kbps | |
| Benthos ATM 960 LF [28] | 6 | {0.08, 2.4} kbps | |
| AQUATEC AQUAmodem1000 [69] | 10 km | {0.1, 2} kbps | |
| AquaSeNT AM-D2000 [30] | 5 km | {0.375, 1.5} kbps | |
| DiveNET: Sealink R [55] | 2.5 km | {0.56, 1.2} kbps in shallow water | |
| Develogics HAM.NODE [11] | 30 km | 145 bps | |
| DiveNET: Sealink {C,S} [55] | 8 km | 80 bps in shallow water | |
| MF | Sercel MATS3G 34 kKHz [33] | 5 km | {20, 300} bps secure data with coding, {1, 24.6} kbps high rate with no coding |
| LinkQuest UWM2000 series [31] | 1 km | 17.8 kbps raw bit rate, {0.3:6} kbps payload data rate | |
| Subnero WNC [40] | [3, 5] km | 15 kbps | |
| EvoLogics S2C R 18/34 [29] | 3.5 km | {1, 13.9} kbps raw bit rate with no coding, {0.6, 9} kbps net data rate with coding | |
| Popoto Modem [36] | [1, 8] km | {0.08, 10} kbps | |
| AquaSeNT AM-OFDM-13A [30] | 5 km | {1.5, 9} kbps | |
| Sonardyne 6G [38] | 1.5 km | {0.2, 9} kbps | |
| Kongsberg cNODE MF [34] | 1 km | up to 4.5 kb/s | |
| Benthos ATM 960 MF, band C [28] | 1.5 km | {0.08, 2.4} kbps, 15 kbps possible in very quiet deep ocean environments | |
| Applicon Seamodem [37] | 100 s of m | {0.75,2} kbps | |
| DSPComm Aquacomm Gen2 [39] | 8 km | {0.1, 1} kbps | |
| Blueprint Subsea X150 USBL Beacon[41] | 1 km | 100 s bps | |
| DiveNET: Sealink M [55] | 1 km | 80 bps | |
| HF | Rutgers MIMO modem [62] | 10 s of m | {100, 250} kbps |
| Northeastern SEANet prototype [65] | 10 s of m | {41, 250} kbps | |
| BaltRobotics Prototype [66] | [100, 200] m | {1, 115} kbps | |
| MIT Prototype [59] | 200 m | 100 kbps | |
| FAU Hermes modem prototype [64] | 150 m | 87.7 kbps | |
| EvoLogics S2C M HS [29] | 300 m | {2, 62.5 kbps raw bit rate with no coding, {1.2, 35} kbps net data rate with coding | |
| Marecomms ROAM Prototype [67] | 0.6 km 1 km expected | 26.7 kbps actual throughput in shallow water 50 kbps expected in the new version | |
| AHOI modem [56] | 200 m | 200 bps | |
| Waterlinked M64 [57] | 200 m | 64 bps |
| Manufacturer and Model | Max Range | Bit Rate | |
|---|---|---|---|
| Laser | FUDAN modem [76] | 34.5 m | 2.70 Gbps |
| Oceanit ultra [78] | 100 m | 1 Gbps | |
| USTC modem [77] | 100 m | 500 Mbps | |
| Sonardyne BlueComm 5000 [75] | 7 m | 500 Mbps | |
| SA Photonics Neptune [80] | 200 m | 200 Mbps customized, with beam steering capabilities | |
| MC100 [74] | 10 m | 95 Mbps | |
| JAMSTEC modem [79] | 50 m | 20 Mbps | |
| LED SR | Sant’Anna OptoCOMM [8] | 10 m | 10 Mbps |
| Sonardyne BlueComm 100 [7] | 15 m | 5 Mbps | |
| CoSa optical [5] | 20 m | 2 Mbps | |
| ENEA PoC [81] | 1 m | 2 Mbps | |
| IST Medusa Optical Modem [84] | 10 m | {20, 200} kbps | |
| Aquatec AQUAmodem Op1 [9] | 1 m | 80 kbps | |
| LED MR | Penguin Automated Systems [82] | [10, 300] m | {1.5, 100} Mbps custom |
| Sonardyne BlueComm 200 [7] | 120 m | 10 Mbps | |
| Sonardyne BlueComm 200 UV [7] | 75 m | 10 Mbps | |
| MIT AquaOptical modem [72] | 50 m | 4 Mbps | |
| Ifremer optical modem [73] | 60 m | 3 Mbps | |
| Hydromea Luma 500ER [25] | 50 m | 500 kbps |
| Manufacturer and Model | Max Range | Bit Rate | |
|---|---|---|---|
| (E)VLF-RF | VLF (3–30) kHz [99,100] | 20 m below the sea surface, inland antenna size = 2 km | 300 bps one way, from land to underwater |
| ELF (3–300) Hz [102,103] | hundreds of meters below the sea surface, inland ground dipole size = [52, 60] km | 1 bps one way, from land to underwater | |
| MI | Dalhousie Univ. Prototype [96] | 10 m | 8 kbps |
| inductive modems for mooring lines [86,87,88] | up to few kilometers from tx using the mooring line, few cm from the mooring line | {1, 2} kbps | |
| MST Prototype [97] | 40 m | 1 kbps | |
| CSS/MISL Prototype [98] | [250, 400] m | {153, 40} bps | |
| RF | WiSub Maelstrom [92] | 5 cm | 100 Mbps |
| CoSa WiFi [5] | 10 cm | {10, 50} Mbps | |
| WFS Seatooth S500 [91] | 10 cm | 10 Mbps | |
| INESC TEC Dipole [6] | 1 m | 1 Mbps | |
| CoSa EF Dipole [5] | [1, 8] m | {0.2, 1} Mbps | |
| WFS Seatooth Mark IV SR [4] | [5, 7] m | 2.4 kbps | |
| WFS Seatooth Mark IV MR [4] | [30, 45] m | 100 bps |
| SRM Mode | MRM mode | LRM Mode | |
|---|---|---|---|
| Joystick position control | ✓ | ✗ | ✗ |
| Way-point position control | ✓ | ✓ | ✓ |
| Video High Quality | ✓ | ✗ | ✗ |
| Video Very Low Quality | ✓ | ✓ | ✗ |
| Gripper remote control | ✓ | ✗ | ✗ |
| Transmit HD image | ✓ | ✗ | ✗ |
| Take and store HD image | ✓ | ✓ | ✓ |
| Light intensity control | ✓ | ✓ | ✓ |
| Status Monitoring | ✓ | ✓ | ✓ |
| LBL positioning | ✓ | ✓ | ✓ |
| Optical modem | ✓ | ✗ | ✗ |
| HF acoustic modem | ✗ | ✓ | ✗ |
| MF LBL acoustic modem | ✓ | ✓ | ✓ |
| Max range | 10 s of meters | 100 s of meters | 10 km |
| ROV -> control station | 2 Mbps, low latency, no jitter | 15 kbps | 76 bps |
| Control station -> ROV | 4.5 kbps, low latency | 160 bps | 50 bps |
| Parameter | Description |
|---|---|
| Optical attenuation coefficient | 0.02–0.5 depending on the sea depth |
| Optical light noise conditions | Low light noise caused by external artificial sources. |
| Optical wavelength and data rate | 470 nm, 4 Mbps |
| Optical MAC | TDMA (90% HROV, 10% control station) |
| Optical range | from 25 m to 75 m, depending on depth and alignment |
| MF data rate, carrier frequency, bandwidth | 4 kbps, 24 kHz and 12 kHz |
| HF data rate, carrier frequency, bandwidth | 30 kbps, 150 kHz and 60 kHz |
| HF MAC | CSMA |
| MF MAC | CSMA |
| General acoustic parameters | s = 1, w = 1 m/s, g = 1.75 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Campagnaro, F.; Signori, A.; Zorzi, M. Wireless Remote Control for Underwater Vehicles. J. Mar. Sci. Eng. 2020, 8, 736. https://doi.org/10.3390/jmse8100736
Campagnaro F, Signori A, Zorzi M. Wireless Remote Control for Underwater Vehicles. Journal of Marine Science and Engineering. 2020; 8(10):736. https://doi.org/10.3390/jmse8100736
Chicago/Turabian StyleCampagnaro, Filippo, Alberto Signori, and Michele Zorzi. 2020. "Wireless Remote Control for Underwater Vehicles" Journal of Marine Science and Engineering 8, no. 10: 736. https://doi.org/10.3390/jmse8100736
APA StyleCampagnaro, F., Signori, A., & Zorzi, M. (2020). Wireless Remote Control for Underwater Vehicles. Journal of Marine Science and Engineering, 8(10), 736. https://doi.org/10.3390/jmse8100736