1. Introduction
An effective design of the ship hull and propulsion system is based on the full knowledge of fluid dynamics under the ship’s real transportation condition. Accurate prediction of the self-propulsion performance is one of the most important factors for the energy-efficient design of a ship. In general, it is believed that the evaluation of the ship’s hydrodynamic performance with high accuracy and confidence level can be achieved at model-scale through towing tank experiments or numerical simulations. Then, full-scale ship performance prediction can be obtained by extrapolating the model-scale results according to the law of similarity and the extrapolating method recommended by ITTC (The International Towing Tank Conference). This way is reliable for classical ships and typical propulsion systems, but it remains questionable for new types of hull form, propeller and energy-saving devices, especially on very large ships with high Reynolds number. Since the full-scale sea trial test is unavailable during the design stage, the numerical method is an effective and efficient way to investigate full-scale ship’s performance and local flow characteristics.
Currently, the most state-of-art numerical tools in marine hydrodynamic analysis are based on Reynolds-averaged Navier–Stokes (RANS) equations and realized by the finite-volume method. For model-scale ship, the workshop on CFD in Ship Hydrodynamics [
1] hold every five years in Gothenburg and Tokyo witnessed the development of Computational Fluid Dynamics (CFD) methods. Time-averaged RANS is able to accurately predict the mean flow field and force coefficients for ships with no drift angle [
2]. However, the practice cases for full-scale ship is relatively less. In early 2000, Dubigneau et al. [
3] also applied the full-scale CFD method to optimize hull form and found a significant difference in design results. At the same time, Leer–Andersen and Larsson [
4] performed an experimental and numerical investigation on full-scale ship to evaluate the effect of different surface topographies on skin friction. As a result, a modification on friction resistance calculations were added to the CFD code SHIPFLOW. Wall roughness is the most challenging issue in full-scale simulation. Bhushan et al. [
5] studied the modeling of wall roughness and demonstrates the versatility of a two-point, multilayer wall function in computing model- and full-scale ship flows. A systematic analysis including friction resistance prediction, self-propelled simulation, and seakeeping calculation were performed in their work and the result shows that rough-wall simulation predicted better results.
With the development of novelty ship forms, propeller, and ESDs, scale effect becomes the most challenging part in predicting ship resistance, propulsion performance, and energy-saving effect. Full-scale performance estimation with model-scale results uses friction correlation line and form factor and refers to the ITTC guidelines [
6]. The ITTC guidelines assume that the form factor is the same for model- and full-scale ship and is independent of ship speed. Min and Kang [
7] questioned these assumptions and performed towing tank tests for a series of Reynolds number. As form factor increased with the Reynolds number, they suggested a new extrapolating procedure for the prediction of the full-scale ship resistance. Katsui et al. [
8], Eca and Hoekstra [
9] also proposed their recommendations on friction correlation lines. Park [
10] studied the scale effect of form factor depending on change in the Reynolds number with the CFD method and made a comparison with three kinds of friction resistance curves. He concludes that the self-propulsion components were sensitively influenced by large and small correlations owing to the different the revolution, thrust and torque of propellers and will cancel each other by analysis step.
For the prediction of ship’s powering performance, scale effect on stern flow field and hull/propeller interaction is more significant [
11]. Starke and Bosschers [
12] discussed the scale effects in ship powering performance with a hybrid RANS-BEM method. Their result shows a maximum difference of 3% in thrust, which is higher than the difference in hull resistance. Lin and Kouh [
13] focused on the scale effect of the thrust deduction factor. They assumed that the thrust deduction factor is not the same for model and full scales which is in contrast to the ITTC documents. Their research proposed an innovative self-propulsion balancing procedure and derived a simplified model for full-scale prediction. The large discrepancies between the wake fields of model-scale and actual ships are assumed to be the main source of the scale effect of ship performance. Wang et al. [
14] resolved the viscous flow fields of ship at different scales by the RANS method and analyzed the scale effect that relies on the axial nominal wake field. They concluded that the reciprocal of mean axial wake fraction of propeller disc exhibits a near liner dependence on Reynolds number in logarithmic scale and the wake width in medium and outer radius reveals negative exponent power function dependence on Reynolds number in logarithmic scale. Guo et al. [
15] studied the method to correct scale effect in the design procedure, they proposed a non-geometrically similar model to produce a closer wake field to that of an actual ship. Their method could help to access the full-scale flow field with model-scale experiments or simulations and has been successfully applied to the KRISO container ship (KCS).
Park et al. [
16] combined the model-scale and full-scale computation to predict wake fraction for full-scale ship, and proposed a reliable and efficient propulsive performance prediction method for full scale ships with ESDs. Shen et al. [
17] studied the scale effects for rudder bulb and rudder thrust fin on propulsion efficiency based on a numerical approach. Their result shows that the model scale simulations predicted 4.85% gains in terms of propulsive efficiency while full scale simulations indicated 2.28% efficiency gains.
For the numerical methods of self-propulsion simulation, several approaches have been developed by previous researchers, including fully discretized propeller approaches and some RANS/potential coupling approaches. The former one will consider the real propeller geometry and solve the rotation region and stationary region within a unique RANS model, such as multiple reference frame method [
18], sliding mesh method and dynamic overset method [
19]. These approaches are certainly time-consuming due to the large discrepancy between propeller rotation period and ship’s traveling wave period. The later ones introduced actuator disk method or body force method to simulate the effect of propeller rotation, many attempts such as momentum theory [
20], boundary element method [
12,
21] or optimal circulation lifting line theory [
22,
23] are performed to produce propeller’s body force in ship wake. Free surface treatment is another important issue in simulating the self-propulsion. Usually, double-model approach is the first choice considering the computational cost, this is conducted by replacing the free surface with a slip wall [
24]. A more realistic method is the VOF method, Wang et al. [
25] analyzed the interaction of hull-propeller-rudder system considering free surface by RANS method and VOF model at model and full scale.
The series workshops on CFD in ship hydrodynamics have successfully promoted the world-wide validation of model-scale simulations. However, the accessible validation data is extremely rare for full-scale simulations. Studies on full-scale CFD always validate their results by the extrapolation from towing tank test data. The most well-known project for the validation study of full-scale CFD method is the EU cooperative project EFFORT (European Full-scale Flow Research and Technology) funded by the European Framework 5 program [
26] which developed an appropriate physical modelling for full scale flows and validated the numerical method with direct full-scale measurements. More recently, a workshop on ship scale hydrodynamic computer simulations has been organized by the Lloyd’s register to provide a basic platform for worldwide CFD comparison and validation [
27]. Ponkratov and Zegos [
28] directly compared their full -scale self-propulsion simulation of a ship at the same conditions recorded at the sea trial. Mikkelsen [
24] made a comparison between sea trial measurements, ship scale CFD, model tank experiments and in-service performance.
In this article, we first focus on the flow field in the stern region to analyze the scale effect in the interaction of hull-propeller and free surface. Simulations were performed for a commercial bulk carrier propelled by a five-bladed, right-handed propeller at light ballast condition. A verification study on grid convergence is performed for full-scale simulation with global and local mesh refinements. Two sets of free surface treatments are included to analyze the free surface effect on the propulsion performance and local flow field evolution. Scale effect on ship wake, propeller bearing force and vortex evolution will be analyzed. Then, the method for full-scale self-prolusion balancing will be discussed for different free treatments and their effect on powering performance prediction will be analyzed. The most important part relies on the validation of CFD methods. Differ from the previous researchers who utilizing only towing tank experiments or single sea trail data, we introduce statistical sea trail results for the first time from nine times sea trail test for nine new-built ships with the same hull form, propeller and appendages. The uncertainty among the data acquisition of full-scale ship was thus reduced to a minimum up to now.
This article is organized as follows:
Section 2 gives the mathematical models used in this study including governing equations and computation setup, and
Section 3 presents the sea trail method and the analysis procedure of sea trail data. Then the simulation results will be analyzed and discussed in
Section 4, including scale effect analysis and self-propulsion performance predictions. Detailed comparison of statistical sea trail results, towing tank experiments and CFD simulations is presented in this section to validate the powering predictions in a direct and reliable way. In
Section 5, a short conclusion is presented and plan for future research is given.
3. Sea Trails and Data Analysis
Full-scale simulation could avoid the scaling errors induced by the assumptions in extrapolating the speed prediction. But CFD method still suffers doubts on its accuracy and reliability due to the lack of validation. In this article, sea trials especially speed tests were carried out for 9 bulk carriers with the same hull form, propeller, and rudder. All these 9 bulk carriers were built in the same shipyard and the sea trail tests were carried out by the same team from China Ship Scientific Research Center. Then, the statistical results after correction and analysis were used to validate the full-scale simulation.
The sea trail tests followed the International Organization for Standardization requirement ISO 15016:2015 [
29], including ship heading, ship speed, shaft torque, shaft power, shaft revolution and trial environmental conditions such as water depth, relative wind speed and direction, wave height, wave period and wave direction. All trails were conducted under various engine settings at ballast draught. Prior to every trial, water temperature and density, air temperature, fore draught, midship draught, aft draught were measured at the trial site. For each engine setting, the speed trial is carried out using Double Runs, i.e., each run is followed by a return run in exactly the opposite direction and at the same engine settings.
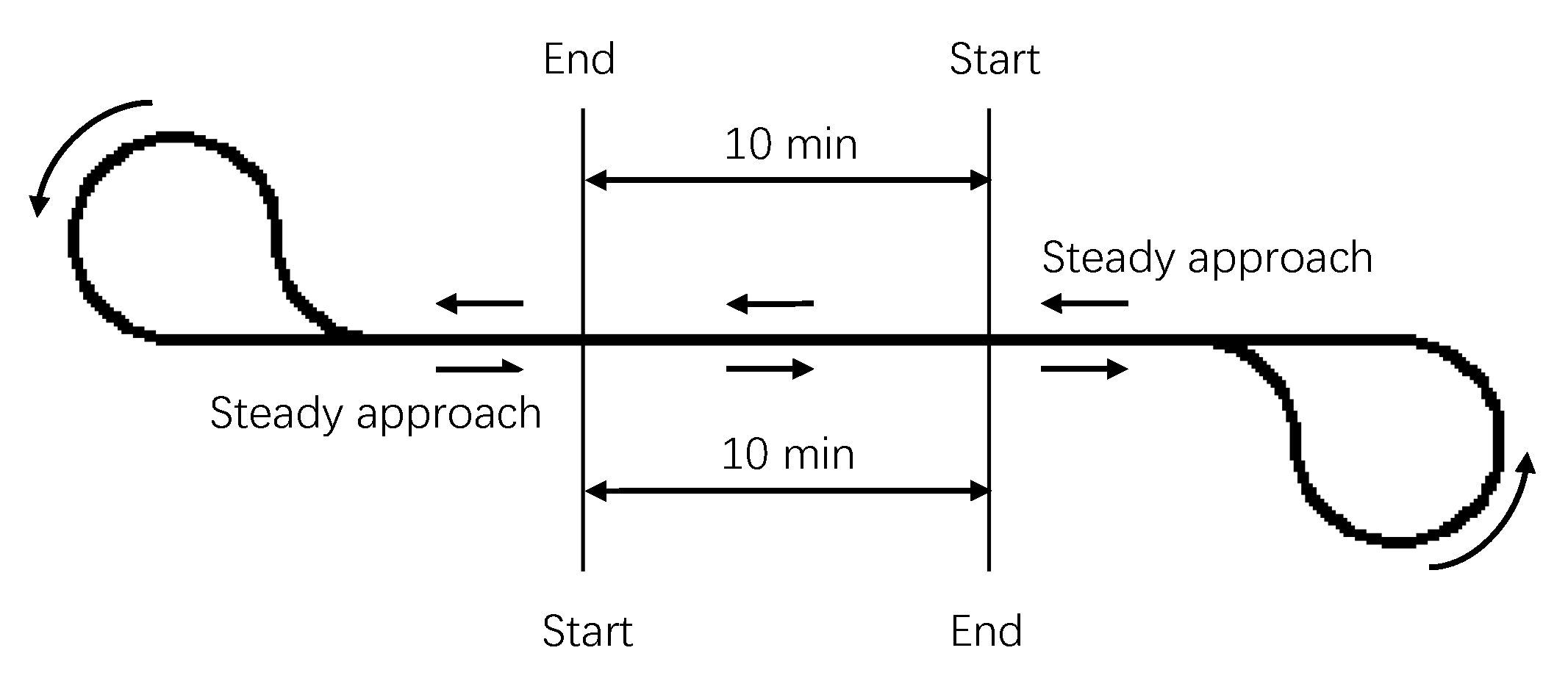
3.1. Ship Heading and Speed Measurement
For all double runs, ship heading and ship’s speed over ground were measured by an independent Differential Global Position System (DGPS) installed on the ships.
Figure 4 shows an illustration of the ship’s track during the Double Runs. The steady approach was long enough to ensure that the tested ships are in a steady condition prior to the commencement of each speed run. The test duration was 10 min for all speed runs.
3.2. Shaft Torque, Power and Revolution Measurements
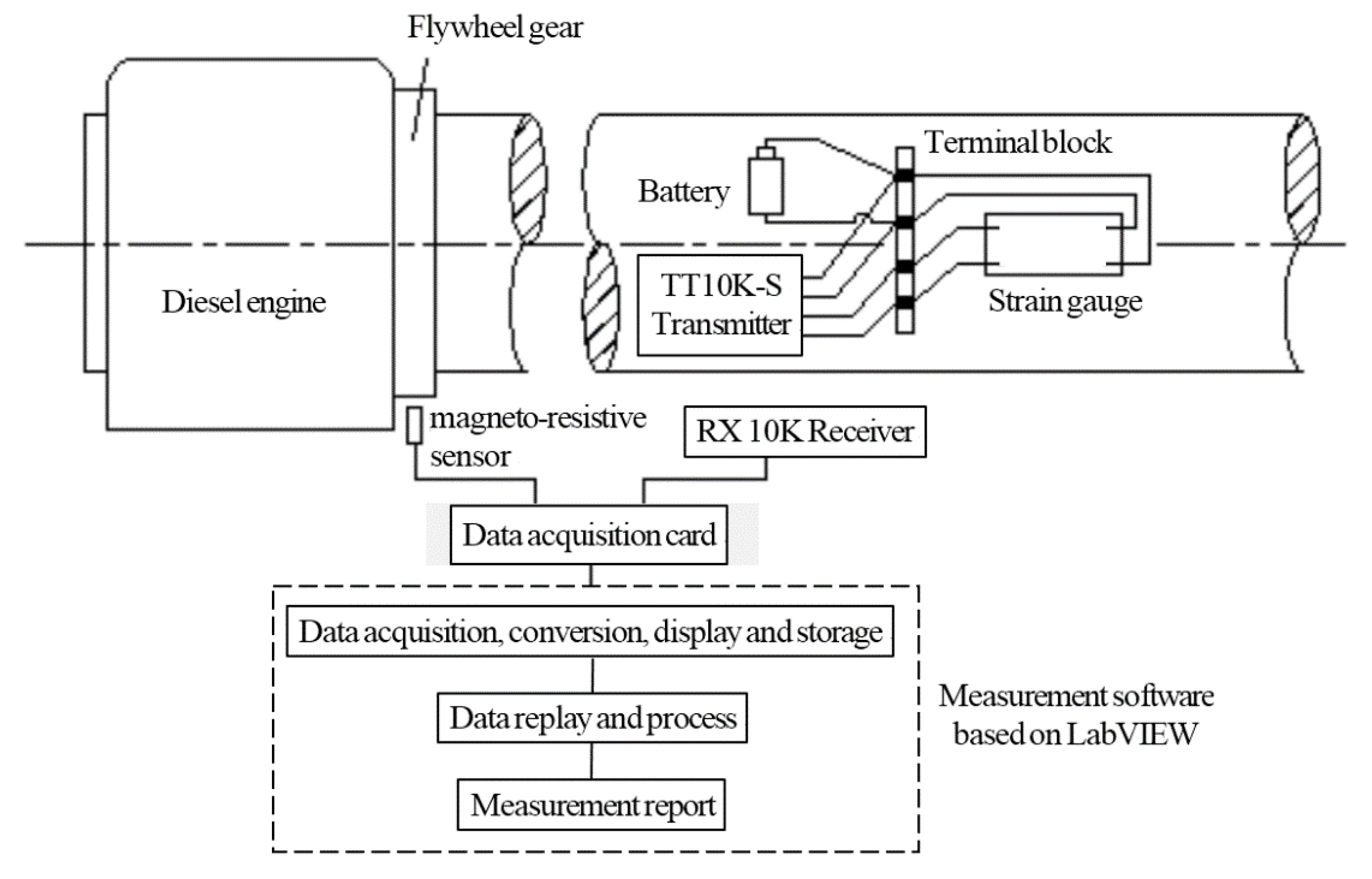
Shaft torque and shaft power were measured by the torque telemetry system installed by CSSRC on the intermediate shaft. The system consists of the strain gauge, terminal block, TT10K torque telemetry system, magneto-resistive sensor, data acquisition card, and measurement software.
Figure 5 shows the system composition proposed by Yun et al. [
30].
Shaft torque could be obtained by measuring the surface shear strain force. Then, shaft power could be calculated by shaft torque and shaft revolution. As shown in
Figure 5, the strain gauge was used to measure the surface shear strain force. One strain gauge is composed of two sets of resistance strain foils along the axis with an angle of 45° and 135°, the four-strain foils are connected by a full-bridge circuit used for converting the change in electric resistance value into a voltage signal. TT10K torque telemetry system (Binsfeld Engineering Inc., Maple City, MI, USA) is composed of 9 V battery, TT10K-S transmitter, and RX 10K receiver. The TT10K-S transmitter is fixed on the shaft and rotates with the shaft. Providing the bridge voltage for the full-bridge circuit of the strain gauge, the measured voltage signal is amplified and transmitted via an antenna. The RX 10K receiver receives and outputs signals in voltage with the range of 0–10 V. The magnitude of the output voltage is proportional to the shaft torque, as shown in the following formula:
where
Me is shaft torque in
,
MFS is the full scale torque in
,
is the full scale output (10 V) of system,
is the elasticity modulus of shaft in
,
and
is the inner and outer diameter of shaft in
mm,
is the bridge excitation voltage in
V,
is the gage factor which is specified on strain gage package,
is the number of active gages which is 4,
is the Poisson’s ratio of shaft material,
is telemetry transmitter gain.
Shaft revolution was measured by a magneto-resistive sensor that can perceive the movement of objects within a distance of 3 mm. The magneto-resistive sensor was installed directly to the flywheel and was about 2 mm away from the tooth surface. When the flywheel rotating through a tooth, the magneto-resistive sensor could output an inductive pulse, and the shaft revolution can be calculated based on the number of pulses accumulated in a specified time period as follows:
where
n is the shaft revolution in
r/min,
is the counting time period in seconds;
is the number of pulses accumulated in the counting time period,
is the number of flywheel teeth.
After measuring the output torque and shaft revolution under a certain engine setting, shaft power can be calculated according to the following formula:
3.3. Trail Environment Measurement and Data Analysis
Directly simulating the sea trail environment is difficult and time-consuming with current CFD methods and could introduce more unknown uncertainties. Thus, it is better to compare and validate the CFD simulation results with ship performance data in still water. As it is difficult to carry out sea trials under ideal conditions, in practice, certain corrections for environmental conditions, such as water depth, wind, waves, current and deviating ship draught, are performed to achieve the corresponding still water performance of target ships. Therefore, during the speed trials, not only ship speed, shaft power, and shaft revolution, but also the relevant environmental conditions were measured at the same time. Water depth was measured by the ship’s echo-sounder, relative wind speed and direction were measured by the ship’s anemometer and wave data were observed by multiple experienced mariners.
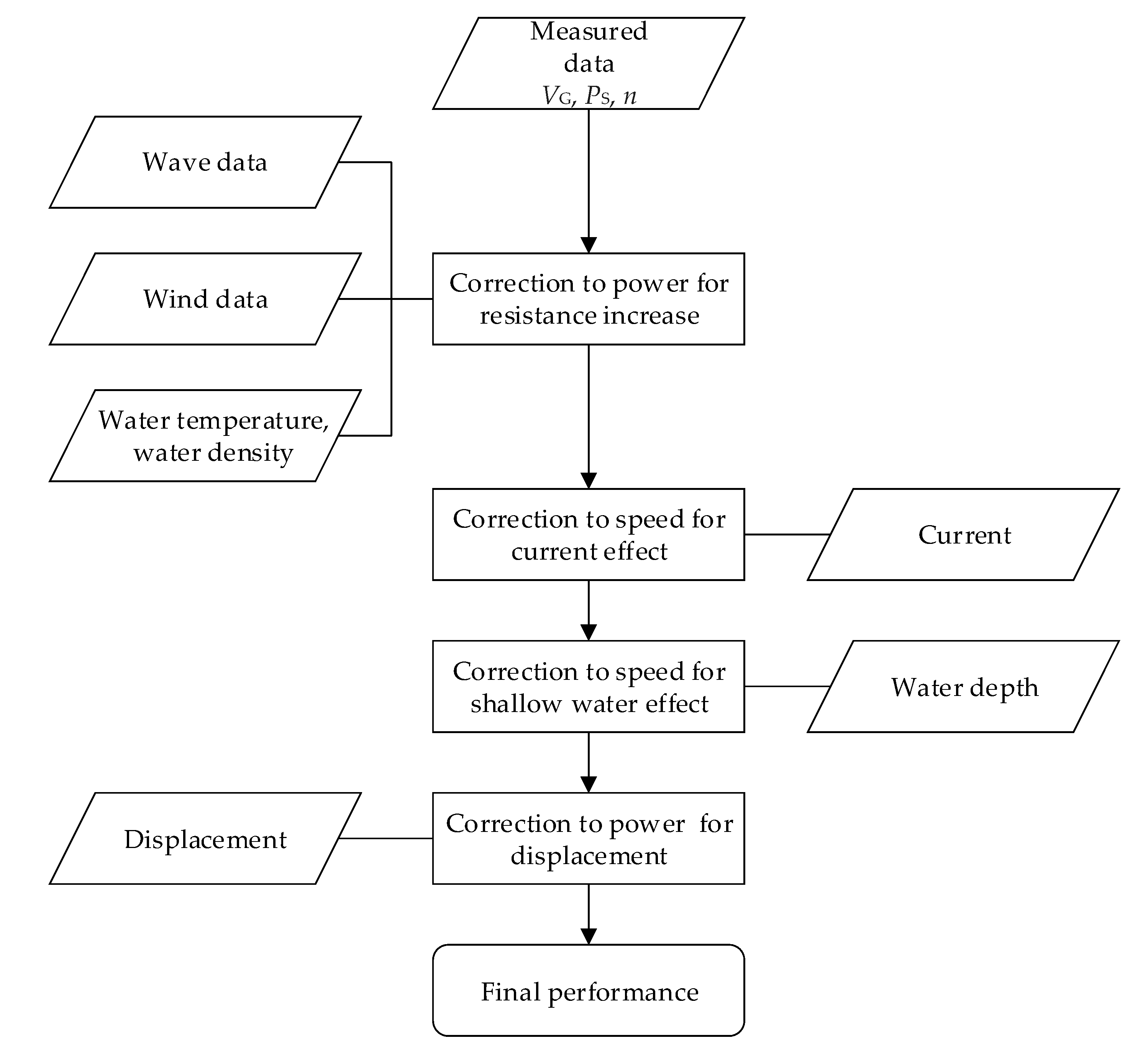
In order to obtain ship’s powering performance under ideal conditions, i.e., no wind, no wave, no current and deep water at 15 °C, the speed trial data were analyzed following the ISO 15016:2015 standard [
29]. The analysis procedure includes corrections to power and speed considering the environmental influences. The analysis procedure could be basically divided into several steps, as shown in
Figure 6.
For each run, the total resistance increase associated with the measured power is calculated. The total resistance increase comes from relative wind, waves, and deviation of water temperature and water density. Then correction to power due to the total resistance increase is conducted based on the ‘direct power’ method. Additionally, the current effect is corrected by the ‘iterative’ method, the shallow water effect is corrected by the ‘Lackenby’ method and the displacement effect is corrected by Admiral-formula which applied to the power values. Finally, the ship’s performance in terms of ship speed, power and shaft revolution under ideal conditions could be obtained.
5. Discussion
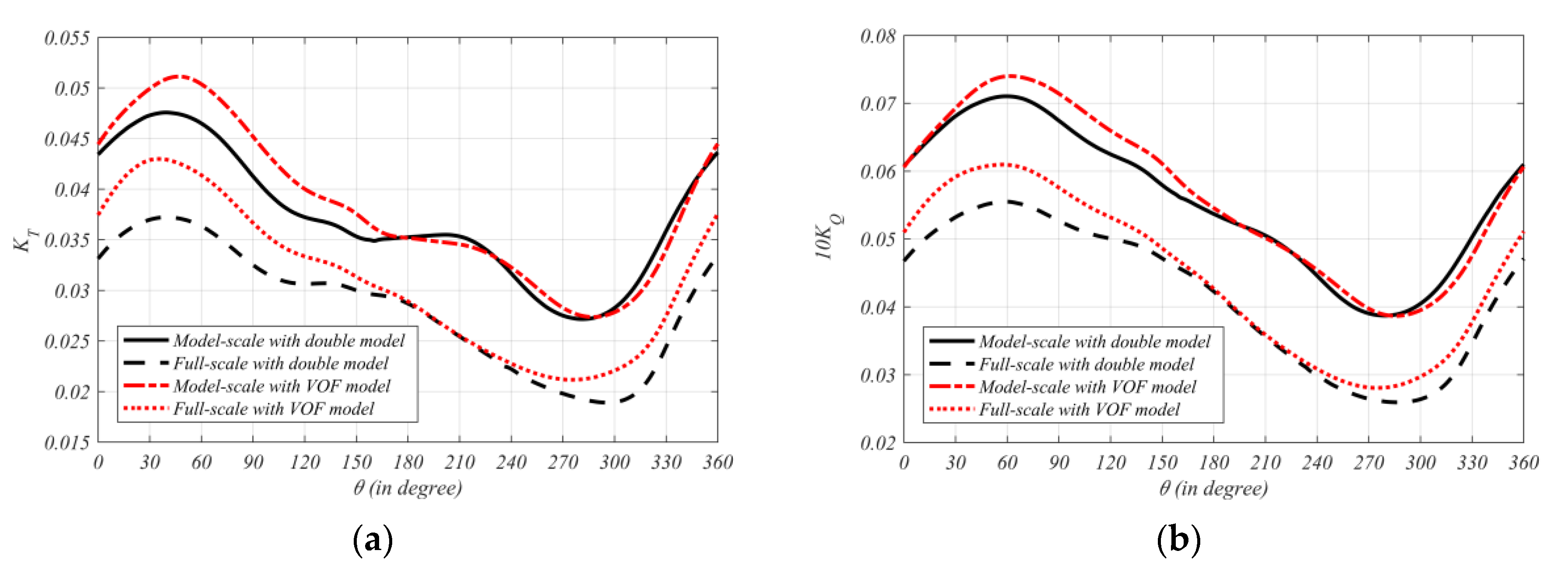
Numerical simulations are performed for a commercial bulk carrier in light ballast condition to investigate the complicated interaction around the propeller and to predict the self-propulsion performance. Free surface effects are considered with double-model and VOF model respectively to quantify the difference between the two methods. Scale-effect of hull-propeller interaction under the free surface is detailed presented by wake field, propeller unsteady force and trailing vortex transportation.
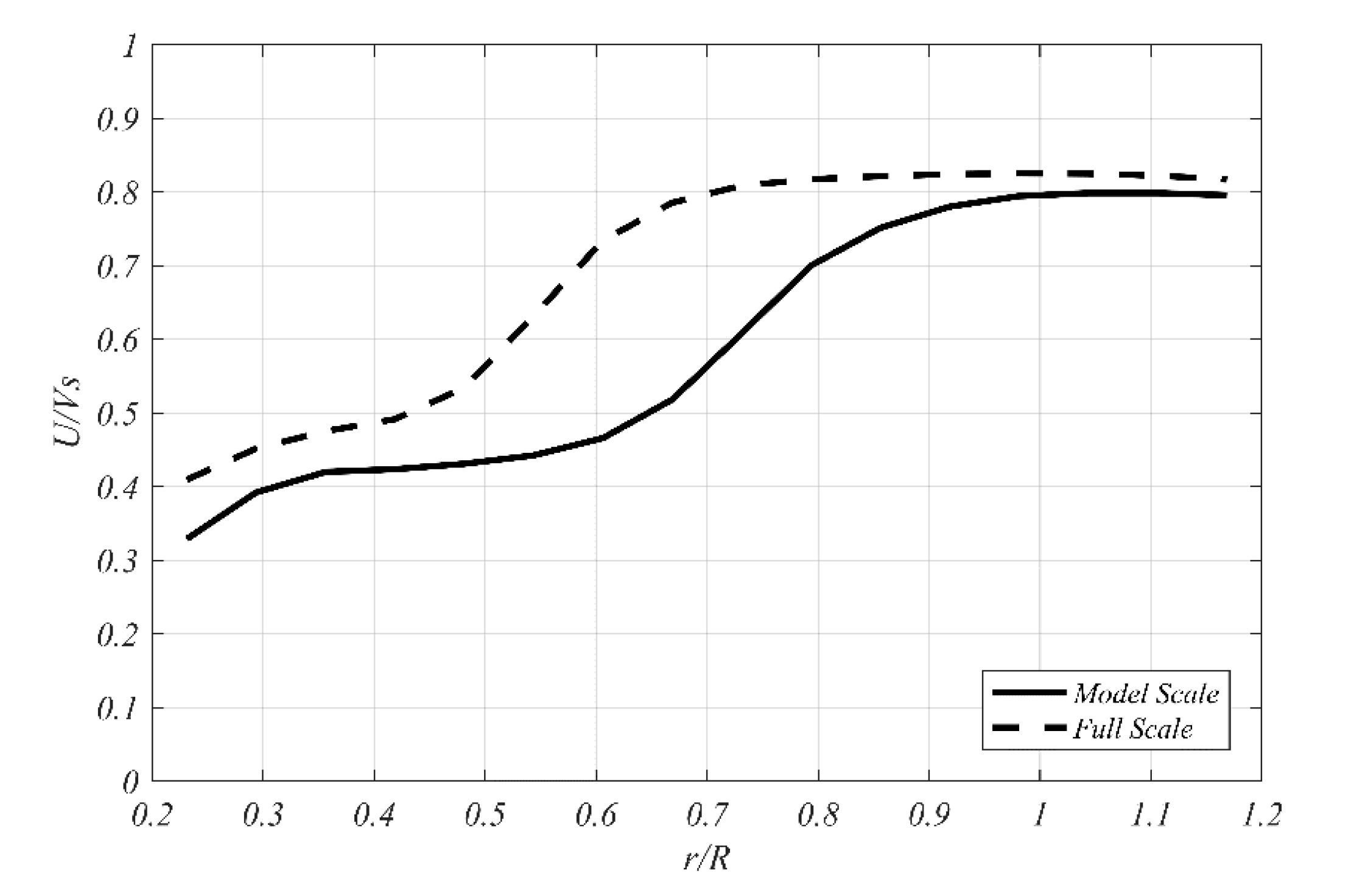
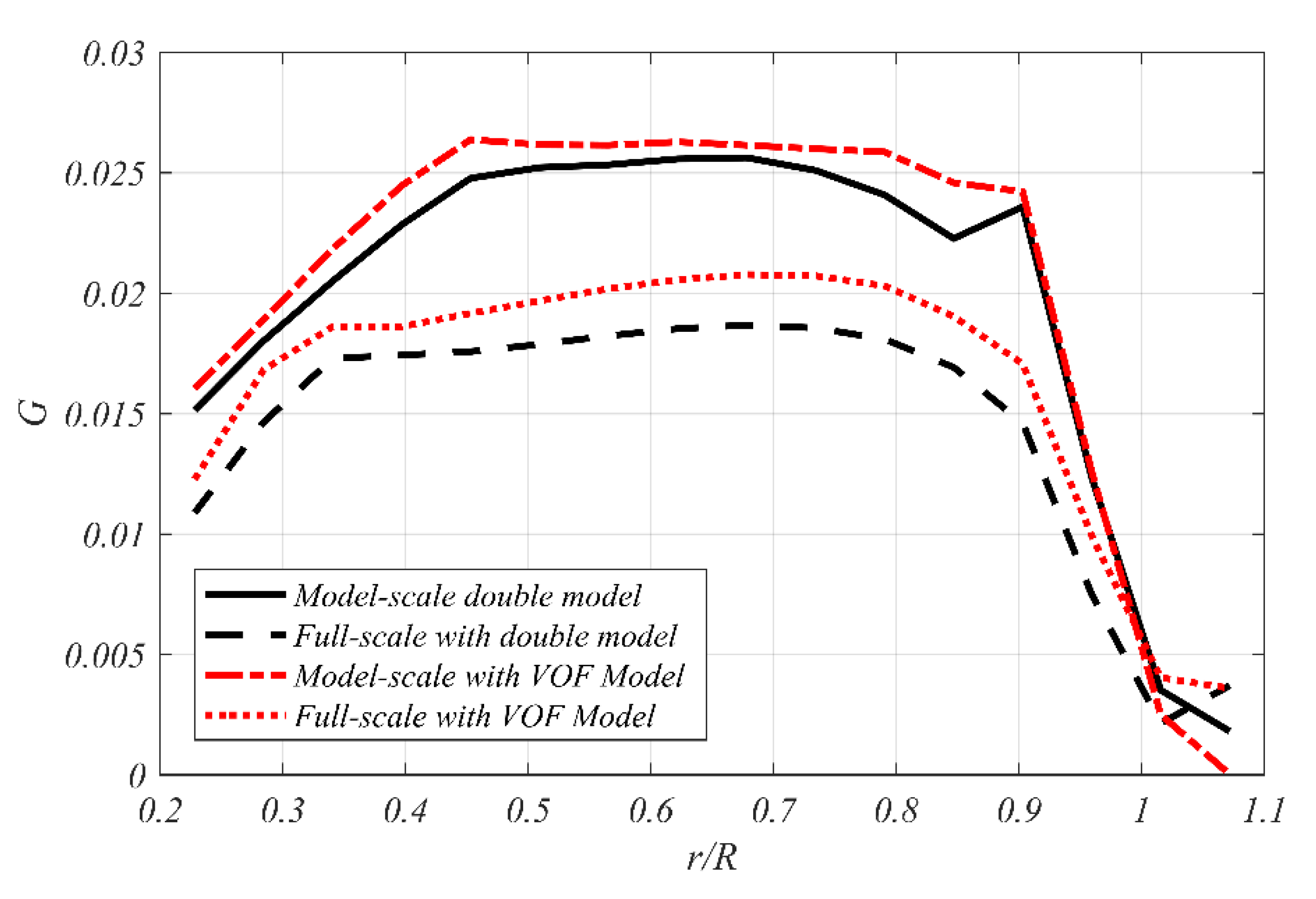
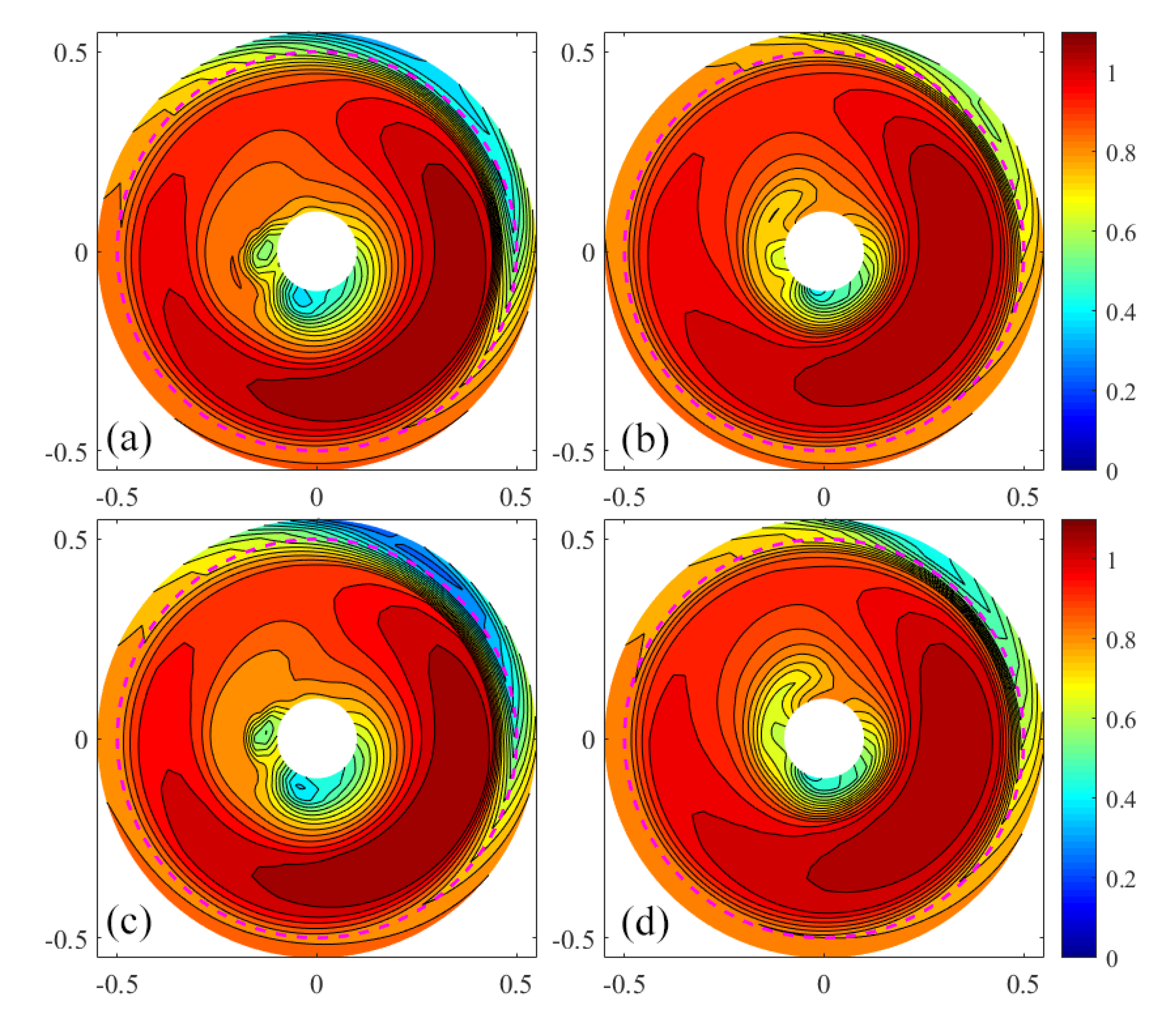
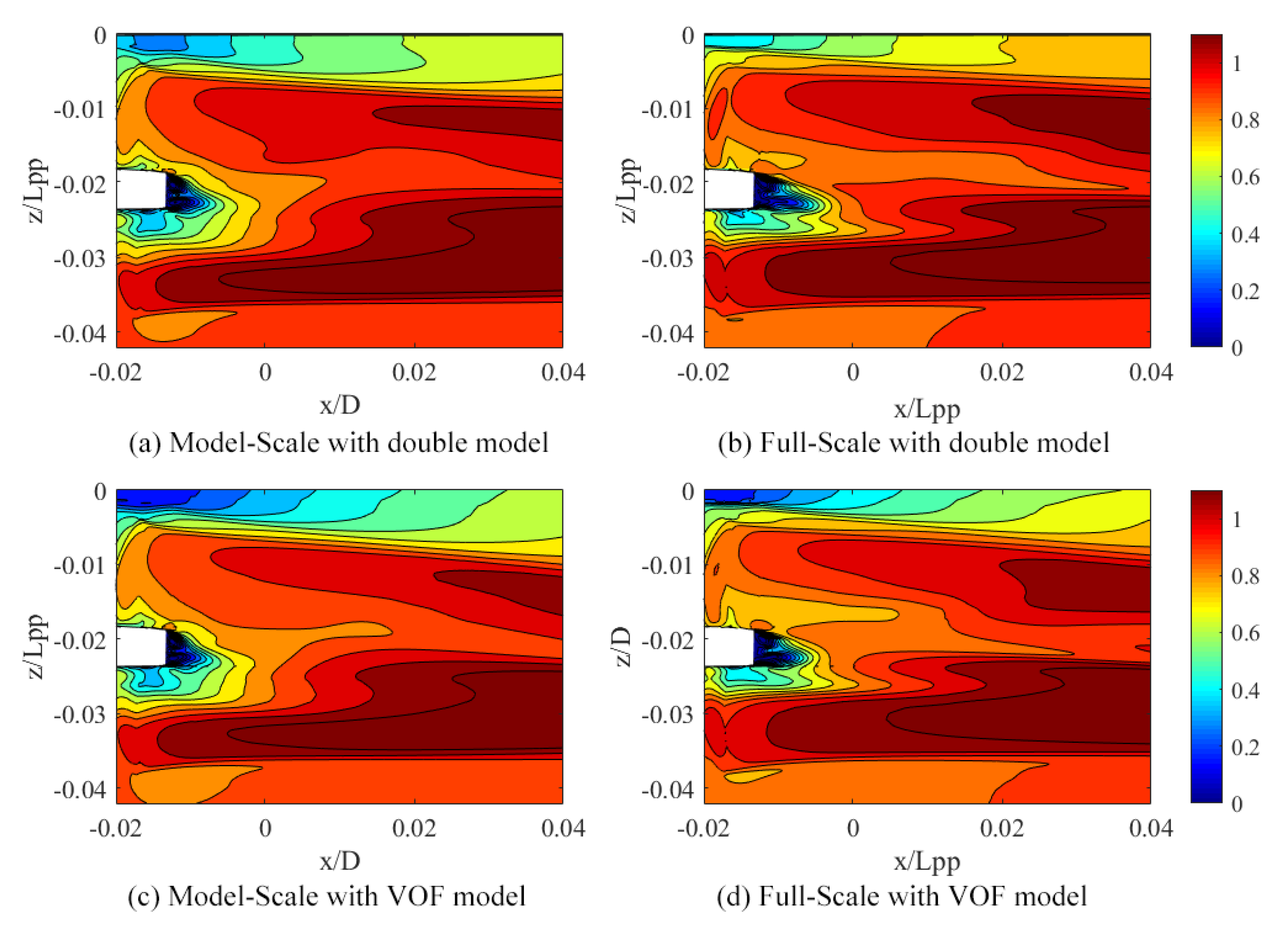
The most significant scale effect appears in the ship wake. Full-scale simulation can produce a smaller high wake region around the shaft, which is the main source of the difference in propeller hydrodynamic performance. The overall circumferential axial velocity is higher for full-scale ship and makes propeller working with a high advance ratio. The propeller loading is significantly higher for model-scale ships according to the analysis of circulation distribution and downstream flow fields. Free surface treatments have non-negligible effect on propeller loading. Compared to the most realistic modeling of the free surface by the VOF model, the double-model treatment apparently underestimates the propeller loading. This phenomenon should be considered in the prediction of self-propulsion performance especially for ballast condition.
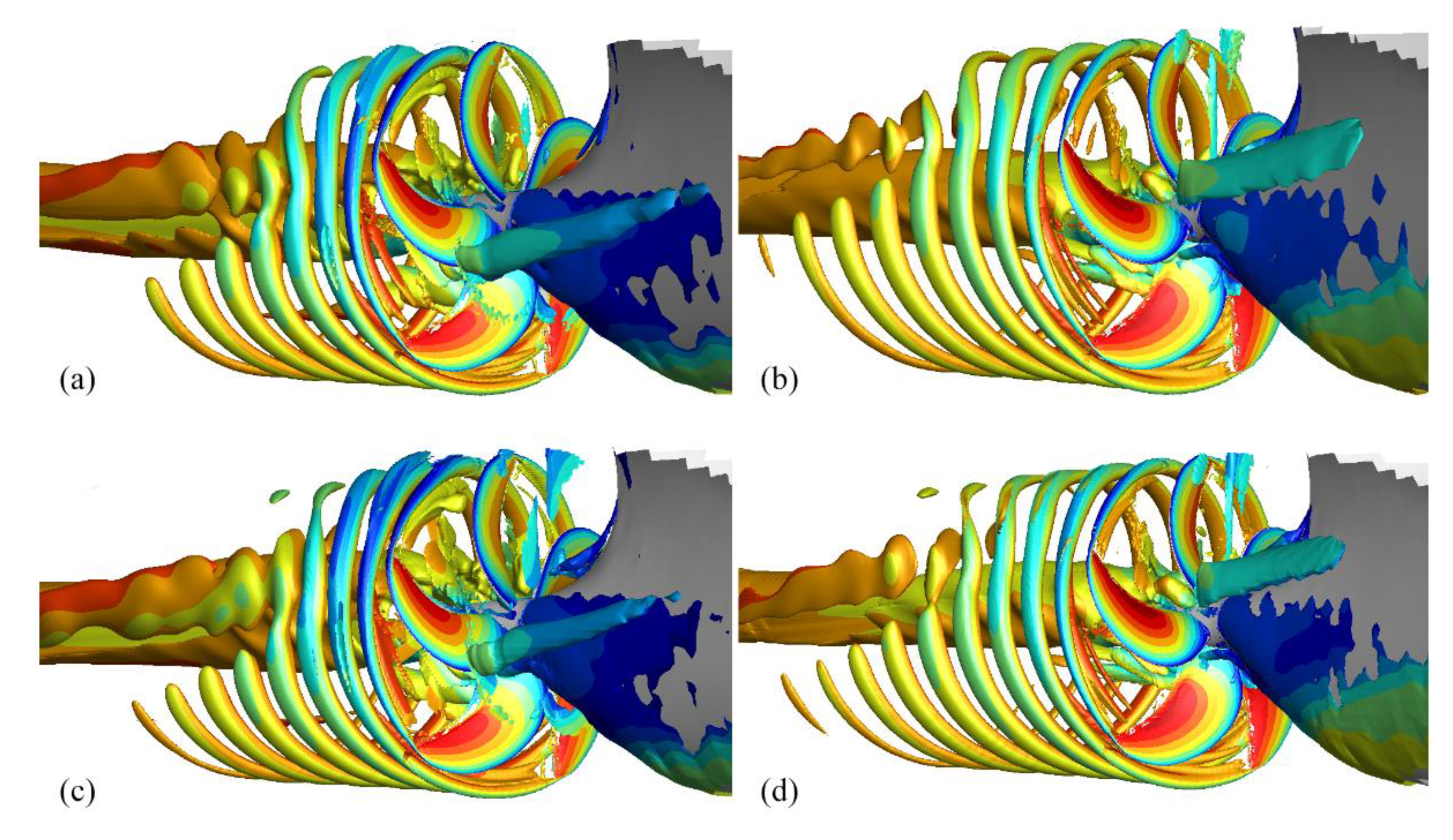
A non-dimensional vortex recognition criterion is introduced to make the vortex structure comparable at different Reynolds numbers. Full-scale and model-scale ship can produce similar trailing vortex sheet, which is more stable at full-scale condition due to the more favorable inflow. The interaction of ship shedding vortex, tip vortex and free surface impact the evolution of the vortex sheet. So, scale effect also originates from ship’s boundary layer separation. Free surface treatments have a small effect on the propeller vortex sheet, the symmetry free surface boundary condition could make propeller tip vortex more vulnerable to break up in downstream.
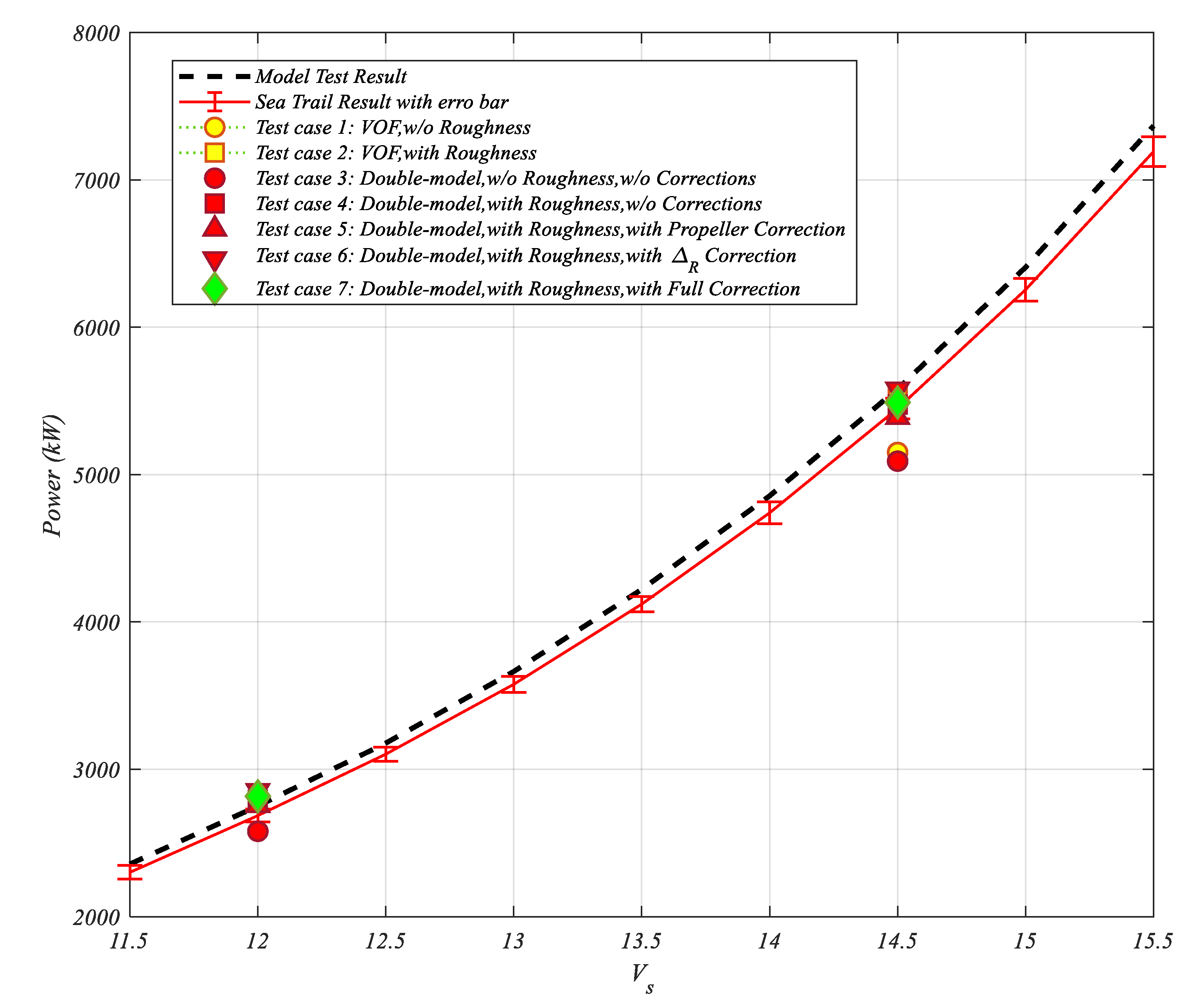
It is well known that considering free surface with VOF in self-propulsion simulation requires a large amount of computational resources. Therefore, we compared the effect of free surface treatments on ship’s self-propulsion balance to offer some suggestions for engineering practice with a more time-saving double-model approach. It could be concluded that the simplification of free surface treatment does not only affect the wave-making resistance for bare hull but also the propeller performance and propeller induced ship resistance. In this case, ignore the free surface correction on propeller performance and propeller induced resistance brings up to 5% more uncertainty to the result of power prediction. According to the simple treatment in this article, roughness is another important factor in full-scale simulation because it has up to approximately 7% effect on the delivery power. As have been discussed by other researchers, the appropriate direct modeling of roughness in CFD method still remains questionable and more experiments, numerical studies and modeling method developments should be made in the future.
The validation data provided by 9 times of sea trail test shows good quality with low uncertainty. For this ship, the towing tank prediction overestimates the power at service speed. Because the detailed information of the extrapolating method is unknown to us in this research, we prefer the statistical sea trial results to validate the CFD predictions. As a result, the numerical simulations of full-scale ship self-propulsion show good agreement with the sea trail data especially for cases that have considered both roughness and free surface effects. Predictions without the consideration of hull surface roughness significantly underestimates the delivery power.
In the future, more scientific studies should be performed to deeply investigate the mechanism of these mutual interactions. Quantitative, statistical or analytical models should be established in the future for better application to industrial design activities. Numerous efforts shall be made in the future to investigate more influence factors like wall roughness modeling, weather condition, and ship motions effect. Also, more detailed and systematical analysis of uncertainty in full-scale simulation and sea trails should be performed in the future to identify the confidence level of currently used predicting methodology.

 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}