Performance Simulation of the Transportation Process Risk of Bauxite Carriers Based on the Markov Chain and Cloud Model



Abstract
1. Introduction
2. Literature Review
3. Methods
3.1. Transportation Risk Assessment
3.2. Markov Chain
3.3. Cloud Model
3.4. Markov Chain Cloud Simulation
4. Results
4.1. Data Collection
4.2. Markov Property Judgment
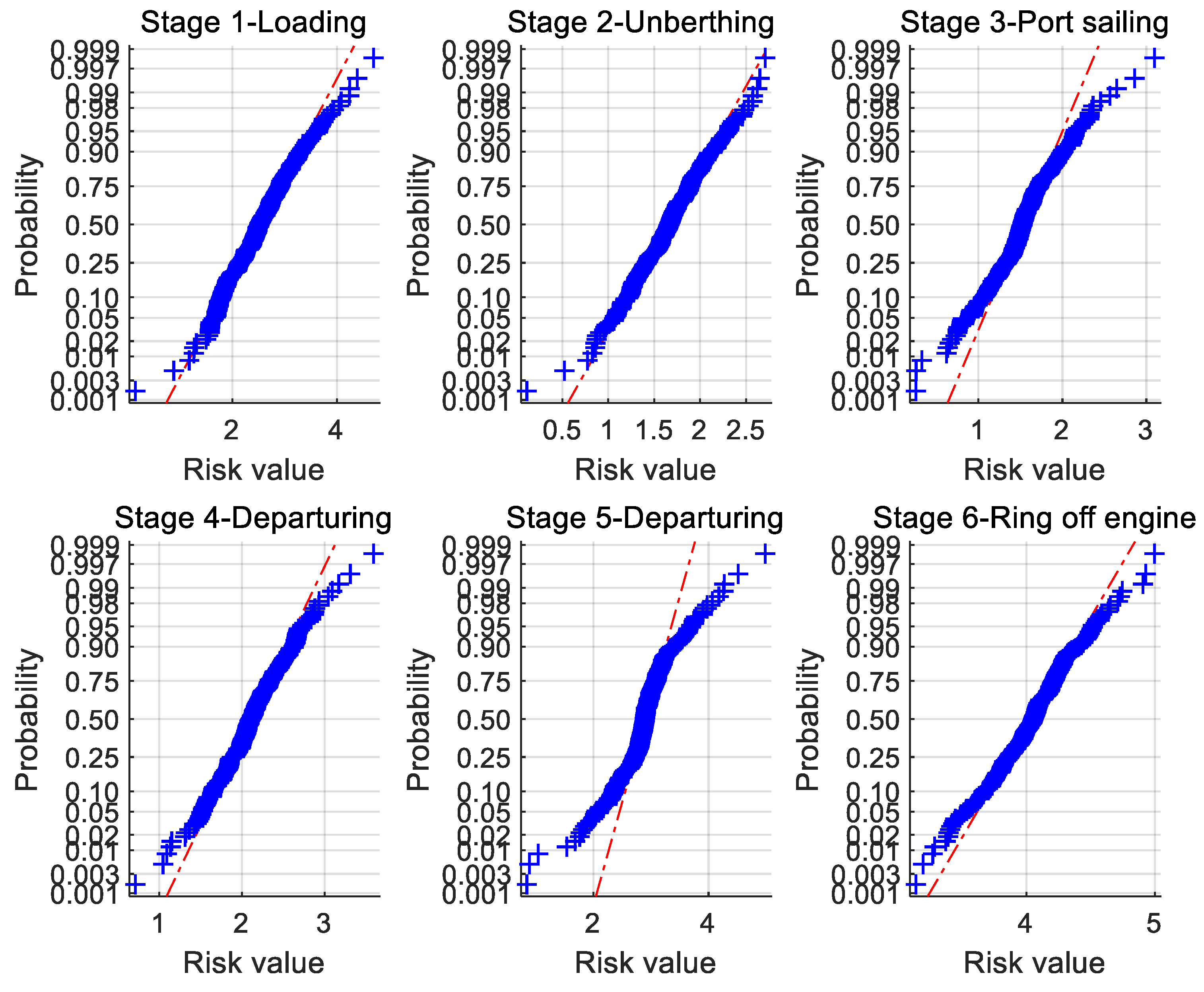
4.3. Cloud Simulation
4.4. Status Transfer of Process Risk
5. Analysis and Discussion
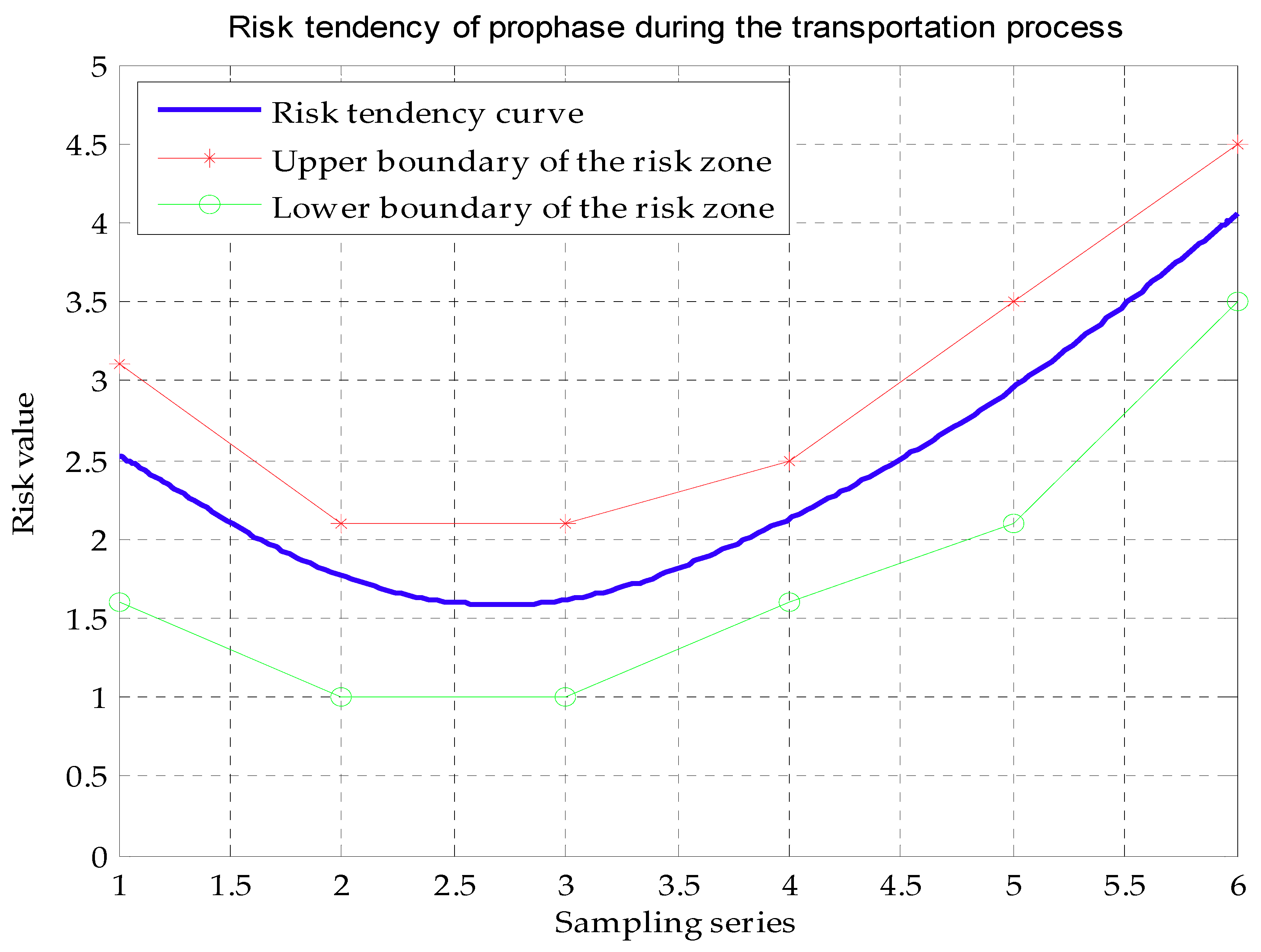
5.1. Tendency of Risk
5.2. Characteristics of Process Risk
- The initial moisture content of the cargo, the conformity of the stowage plan, the weather condition during the cargo loading process, the safety status of the ship, the competence and preparation of the seafarers contribute to the initial risks of the whole transportation process. As a result, the loading stage of the bauxite transportation is at a relatively higher risk status. The special property of the bauxite determines the basic value for the overall risk of the carrier, which is consistent with the practice of shipping. According to the interviews and questionnaires, some risks are hidden in the stages of pre-loading and loading. A total of 65% of seafarers put more emphasis on the inspection of the suitability of the ship prior to loading. A total of 47% of seafarers stated that there is a certain amount of false information provided by shippers prior to loading. A total of 50% of seafarers said that the ship detected water content occasionally in accordance with the IMSBC code. A total of 47% of the seafarers thought good cooperation and communication was lacking between the ship and shore during the process of loading and unloading the bauxite.
- Once loading is completed, the engine trial and the irregular rotation of propeller lead to the vibration of the whole ship, which has negative effects on the status of the bauxite and results in the formation of volatility risk. During unberthing, the risk imposed on the carrier has due to the great fluctuation. The overall risk was low due to the assistance of tugboats and the pilot on board at the wharf apron and harbor waters. However, because of the frequent change of the course and speed, the external interference on the bauxite carrier fluctuates. Therefore, the risk of this phrase is referred to as volatility risk.
- After passing the approach channel offshore, the bauxite carrier encounters a greater disturbance from the complexity of the navigation environment, due to such things as the wind, current and waves [49]. Due to great hull vibrations and wave swings of the ship in the coastal sea, a huge influence on the liquefaction characteristics of bauxite occurred. The risk of the transverse inclination was aggravated on the basis of the small angle heel produced by cargo shifts and compaction. That is the derivative risk in the ocean navigation stage during the transportation process. The risk status in the stages of departure and sea-voyages gradually increase.
- As the bauxite carrier sails farther away from the land and the risk of bauxite liquefaction greatly increases, this is referred to as the derivative risk of the transportation process.
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- China’s Imported Bauxite Was 82.62 Million Tons in 2018. Available online: http://www.mofcom.gov.cn/article/i/jyjl/k/201902/20190202834585.shtml (accessed on 15 February 2019).
- Munro, M.C.; Mohajerani, A. Liquefaction incidents of mineral cargoes on board bulk carriers. Adv. Mater. Sci. Eng. 2016, 2016, 5219474. [Google Scholar] [CrossRef]
- International Association of Dry Cargo Shipowners. Bulk Carrier Casualty Report (Years 2008 to 2017 and the Trends). Available online: https://www.intercargo.org/bulk-carrier-casualty-report-2017/ (accessed on 3 May 2018).
- International Association of Dry Cargo Shipowners. Media Release, 31 January 2019.
- Insurance Companies Appeal Shipowners to Pay Attention to Bauxite Transportation. Available online: http://www.eworldship.com/html/2015/ ship_finance_0109/97262.html (accessed on 9 January 2015).
- IMO: Bauxite Liquefaction Sank Bulk Jupiter. Available online: https://worldmaritimenews.com/archives/172059/imo-bauxite-liquefaction-sank-bulk-jupiter/ (accessed on 21 September 2015).
- Munro, M.C.; Mohajerani, A. Moisture content limits of iron ore fines to prevent liquefaction during transport: Review and experimental study. Int. J. Mineral Process. 2016, 148, 137–146. [Google Scholar] [CrossRef]
- Muzamir, H.; Siti, H.A.; Wan, N.W.J. Basic properties of Gebeng bauxite in accordance to IMSBC Code. Indian J. Sci. Technol. 2017, 10, 1–5. [Google Scholar] [CrossRef]
- Rahman, M.; Mal, B.; Lo, S.R. Prediction of undrained monotonic and cyclic liquefaction behavior of sand with fines based on the equivalent granular state parameter. Int. J. Geomech. 2014, 14, 254–266. [Google Scholar] [CrossRef]
- Wu, A.X.; Sun, Y.Z. Granular Dynamic Theory and Its Applications; Metallurgical Industry Press: Beijing, China; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Buchanan, S.J.; So, H.B.; Kopittke, P.M.; Menzies, N.W. Influence of texture in bauxite residues on void ratio, water holding characteristics, and penetration resistance. Geoderma 2010, 158, 421–426. [Google Scholar] [CrossRef]
- Wang, H.L.; Koseki, J.; Sato, T.; Chiaro, G.; Tian, J.T. Effect of saturation on liquefaction resistance of iron ore fines and two sandy soils. Soils Found. 2016, 56, 732–744. [Google Scholar] [CrossRef]
- Gandhi, R.L.; Norwood, J.; Che, Y.G. Cross-Country Bauxite Slurry Transportation. Essential Readings in Light Metals: Alumina and Bauxite; Springer: Cham, Switzerland, 2016; Volume 1, pp. 70–71. [Google Scholar]
- IMO. MSC 85/26/Add.2 ANNEX 3. International Maritime Solid Bulk Cargoes (IMSBC) Code; International Maritime Organization: London, UK, 2008. [Google Scholar]
- Cai, W.S.; Gao, J.Y.; Zhang, F.J.; Jin, Y.L. Coupling effects between sloshing of liquefied nickel ore and ship motion. Navig. China 2014, 3, 54–58. [Google Scholar]
- Portella, R.B.; Andrade, L.F.; Neto, T.G.; Coelho, N. Single-pour/single pass loading an innovative concept for a new generation of ore carriers. In Proceedings of the 30th International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- Lamba, D.; Barsan, E.; Varsami, C.; Arsenie, A. Simulations performed on a bulk carrier in order to analyze the ship’s stability. Green Mar. Technol. 2015, 717–724. [Google Scholar] [CrossRef]
- Ding, J.H.; Jin, Y.L.; Wang, H. ALE-based parallel numerical simulation for sloshing problem of liquefied ore fines cargo. J. Ship Mech. 2015, 19, 927–933. [Google Scholar]
- Spandonidis, C.C. Modelling and Numerical/Experimental Investigation of Granular Cargo Shift in Maritime Transportation. Ph.D. Thesis, National Technical University of Athens, Athens, Greece, 2016. [Google Scholar]
- Hull Department and Research Institute. ClassNK’s Approach to Safe Carriage of Nickel Ore; ClassNK TECHNICAL BULLETIN: Tokyo, Japan, 2012; pp. 33–37. [Google Scholar]
- Rose, T.P. Solid Bulk Shipping: Cargo Shift, Liquefaction and the Transportable Moisture Limit. Master’s Thesis, University of Oxford, Oxford, UK, 2014. [Google Scholar]
- Wang, H. Effects of Ship Motion on the Transportable Moisture Limit Determination for the Liquefied Cargoes. Master’s Thesis, Dalian Maritime University, Dalian, China, 2015. [Google Scholar]
- Ding, S. Numerical study on vibration characteristics of a cargo ship. Ship Sci. Technol. 2017, 39, 19–21. [Google Scholar]
- Munro, M.C.; Mohajerani, A. Variation of the geotechnical properties of Iron Ore Fines under cyclic loading. Ocean Eng. 2016, 126, 411–431. [Google Scholar] [CrossRef]
- Drzewieniecka, B. Safety aspect of handling and carriage of solid bulk cargoes by sea. Sci. J. Marit. Univ. Szczec. 2014, 39, 63–66. [Google Scholar]
- Holmes, R.; Williams, K.; Honeyands, T.; Orense, R.; Roberts, A.; Pender, M.; McCallum, D.; Krull, T. Bulk commodity characterisation for transportable moisture limit determination. In Proceedings of the International Mineral Processing Congress, Québec City, QC, Canada, 11–15 September 2016. [Google Scholar]
- Ju, L.; Vassalos, D.; Boulougouris, E. Numerical assessment of cargo liquefaction potential. Ocean Eng. 2016, 120, 383–388. [Google Scholar] [CrossRef]
- Shi, D.D.; Wang, F. Discrete element simulation on seismic liquefaction of saturated free-field sand deposits. J. Shanghai Marit. Univ. 2017, 38, 96–102. [Google Scholar]
- Wang, Y.G.; Tan, J.H. Research progress on ship stability and capsizing in random waves. J. Ship Mech. 2010, 14, 191–201. [Google Scholar]
- Zhang, J.W.; Wu, W.Q.; Hu, J.Q. Quantitative study on safety degree of ship capsizing in stochastic waves. J. Dalian Marit. Univ. 2016, 42, 28–34. [Google Scholar]
- Zhong, Z.Y. The effect of ship’s rolling on the movement of cargo in hatch. J. Ningbo Univ. 1997, 10, 110–113. [Google Scholar]
- Zhao, Y.L.; Meng, S.X. Safety transportation of easily fluidized cargoes. J. Dalian Marit. Univ. 2012, 38, 15–18. [Google Scholar]
- Koromila, I.A.; Spandonidis, C.C.; Spyrou, K.J. Experimental investigation of cargo liquefaction and impact on the stability of a bulk-carrier. In Proceedings of the 13th International Ship Stability Workshop, Brest Brittany, France, 23–26 September 2013. [Google Scholar]
- Zou, Y.J.; Shen, C.; Xi, X.Y. Numerical Simulations on the Capsizing of Bulk Carriers with Nickel Ores. J. Navig. 2013, 66, 919–930. [Google Scholar] [CrossRef]
- Andrei, C.; Pazara, R.H. The impact of bulk cargoes liquefaction on ship’s intact stability. UPB Sci. Bull. 2013, 75, 12–16. [Google Scholar]
- Hu, S.P.; Li, F.M.; Xi, Y.T.; Wu, J.J. Novel simulation on Coupling Mechanism of Risk Formation Segments for Marine Traffic System. J. Basic Sci. Eng. 2015, 23, 409–419. [Google Scholar]
- Hu, S.P.; Huang, C.H.; Deng, H.; Huang, D.Z. Markov chain model for the dynamic simulation of process risk in ship pilotage at harbor. J. Harbin Eng. Univ. 2017, 38, 1391–1398. [Google Scholar]
- Hu, S.P.; Xuan, S.Y.; Liu, Y.; Fu, S.S.; Xi, Y.T. Dynamic simulation of process risk on ship navigation at the arctic northeast route. Chin. J. Polar Res. 2019, 31, 84–93. [Google Scholar]
- Wu, J.J.; Liu, Y.X.; Hu, S.P.; Zhao, Y.H. Hidden Markov model for risk estimation of ship carrying liquefiable cargoes. China Saf. Sci. J. 2017, 21, 73–78. [Google Scholar]
- Barrass, C.B.; Derrett, D.R. Simplified Stability Information. In Ship Stability for Masters and Mates, 7th ed.; Butterworth-Heinemann Elsevier Ltd.: Oxford, UK, 2012; pp. 441–446. [Google Scholar]
- Xie, D.W.; Shi, S.L. Mine water inrush prediction based on cloud model theory and Markov model. J. Cent. South Univ. Sci. Technol. 2012, 43, 2308–2315. [Google Scholar]
- Hu, S.P.; Li, X.D.; Fang, Q.G.; Yang, Z.L. Use of Bayesian method for assessing vessel traffic risks at sea. Int. J. Inf. Technol. Decis. Mak. 2008, 7, 627–638. [Google Scholar] [CrossRef]
- Li, K.X.; Yin, J.B.; Bang, H.S.; Yang, Z.L. Bayesian network with quantitative input for maritime risk analysis. Transp. A Transp. Sci. 2014, 10, 89–118. [Google Scholar] [CrossRef]
- Khan, B.; Khan, F.; Veitch, B.; Yang, M. An operational risk analysis tool to analyze marine transportation in Arctic waters. Reliab. Eng. Syst. Saf. 2018, 169, 485–502. [Google Scholar] [CrossRef]
- Zhang, X. Study on ship oil-spill risk assessment based on small samples. Ship Eng. 2009, 31, 76–80. [Google Scholar]
- Gucma, L.; Smalko, Z. Selected problems and methods of navigational risk assessment. In Proceedings of the 12th International Congress of the International Maritime Association of the Mediterranean, Lisboa, Portugal, 26–30 September 2005. [Google Scholar]
- Hermanns, H.; Katoen, J.; Meyer-Kayser, J.; Siegle, M. A markov chain model checker. Lect. Notes Comput. Sci. 2000, 1785, 347–362. [Google Scholar]
- Li, D.Y.; Meng, H.J.; Shi, X.M. Membership clouds and membership cloud generators. J. Comput. Res. Dev. 1995, 32, 15–20. [Google Scholar]
- Pak, J.Y.; Yeo, G.T.; Oh, S.W.; Yang, Z.L. Port safety evaluation from a captain’s perspective: The Korean experience. Saf. Sci. 2015, 72, 172–181. [Google Scholar] [CrossRef]
- Liu, X. To prevent the risk of nickel ore transportation. China Ship Surv. 2016, 8, 68–71. [Google Scholar]
- Global Bauxite Working Group. IMO-CCC4/INF.10. Global Bauxite Working Group Report on Research into the Bauxite during Shipping; International Maritime Organization: London, UK, 2017. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Risk Grade | Very Low | Low | Medium | High | Very High |
|---|---|---|---|---|---|
| Risk value | [0, 1] | [1, 2] | [2, 3] | [3, 4] | [4, 5] |
| Ex | 0 | 1.5 | 2.5 | 3.5 | 5 |
| En | 1/3 | 1/6 | 1/6 | 1/6 | 1/3 |
| He | 1/25 | 1/30 | 1/30 | 1/30 | 1/25 |
| Sampling Site | Wharf (t1) | Wharf Apron (t2) | Harbor Basin (t3) | Inner Channel (t4) | Outer Channel (t5) | Coastal Sea (t6) |
|---|---|---|---|---|---|---|
| No.1 | 1.6 | 1.5 | 1.5 | 2.0 | 3.0 | 4.2 |
| No.2 | 3.0 | 1.0 | 2.0 | 2.0 | 2.5 | 4.0 |
| No.3 | 2.8 | 2.0 | 1.3 | 2.4 | 3.2 | 4.5 |
| No.4 | 3.0 | 1.6 | 1.0 | 1.8 | 2.1 | 3.8 |
| No.5 | 2.7 | 2.1 | 1.5 | 2.5 | 3.5 | 4.2 |
| No.6 | 1.8 | 1.5 | 1.3 | 1.6 | 2.5 | 3.5 |
| No.7 | 3.1 | 1.8 | 2.1 | 2.5 | 3.0 | 4.0 |
| No.8 | 2.3 | 1.9 | 1.5 | 2.0 | 3.5 | 4.2 |
| Position | Wharf | Wharf Apron | Harbor Basin | Inner Channel | Outer Channel | Coastal Sea |
|---|---|---|---|---|---|---|
| Ex | 2.5375 | 1.6750 | 1.5250 | 2.1000 | 2.9125 | 4.0500 |
| En | 0.5992 | 0.3447 | 0.3290 | 0.3447 | 0.1097 | 0.1097 |
| He | 0.1669 | 0.0788 | 0.1592 | 0.0858 | 0.4935 | 0.1091 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Hu, S.; Jin, Y.; Fei, J.; Fu, S. Performance Simulation of the Transportation Process Risk of Bauxite Carriers Based on the Markov Chain and Cloud Model. J. Mar. Sci. Eng. 2019, 7, 108. https://doi.org/10.3390/jmse7040108
Wu J, Hu S, Jin Y, Fei J, Fu S. Performance Simulation of the Transportation Process Risk of Bauxite Carriers Based on the Markov Chain and Cloud Model. Journal of Marine Science and Engineering. 2019; 7(4):108. https://doi.org/10.3390/jmse7040108
Chicago/Turabian StyleWu, Jianjun, Shenping Hu, Yongxing Jin, Jiangang Fei, and Shanshan Fu. 2019. "Performance Simulation of the Transportation Process Risk of Bauxite Carriers Based on the Markov Chain and Cloud Model" Journal of Marine Science and Engineering 7, no. 4: 108. https://doi.org/10.3390/jmse7040108
APA StyleWu, J., Hu, S., Jin, Y., Fei, J., & Fu, S. (2019). Performance Simulation of the Transportation Process Risk of Bauxite Carriers Based on the Markov Chain and Cloud Model. Journal of Marine Science and Engineering, 7(4), 108. https://doi.org/10.3390/jmse7040108