Experimental Investigation on Hydrodynamic Coefficients of a Column-Stabilized Fish Cage in Waves

Abstract
:1. Introduction
2. Materials and Methods
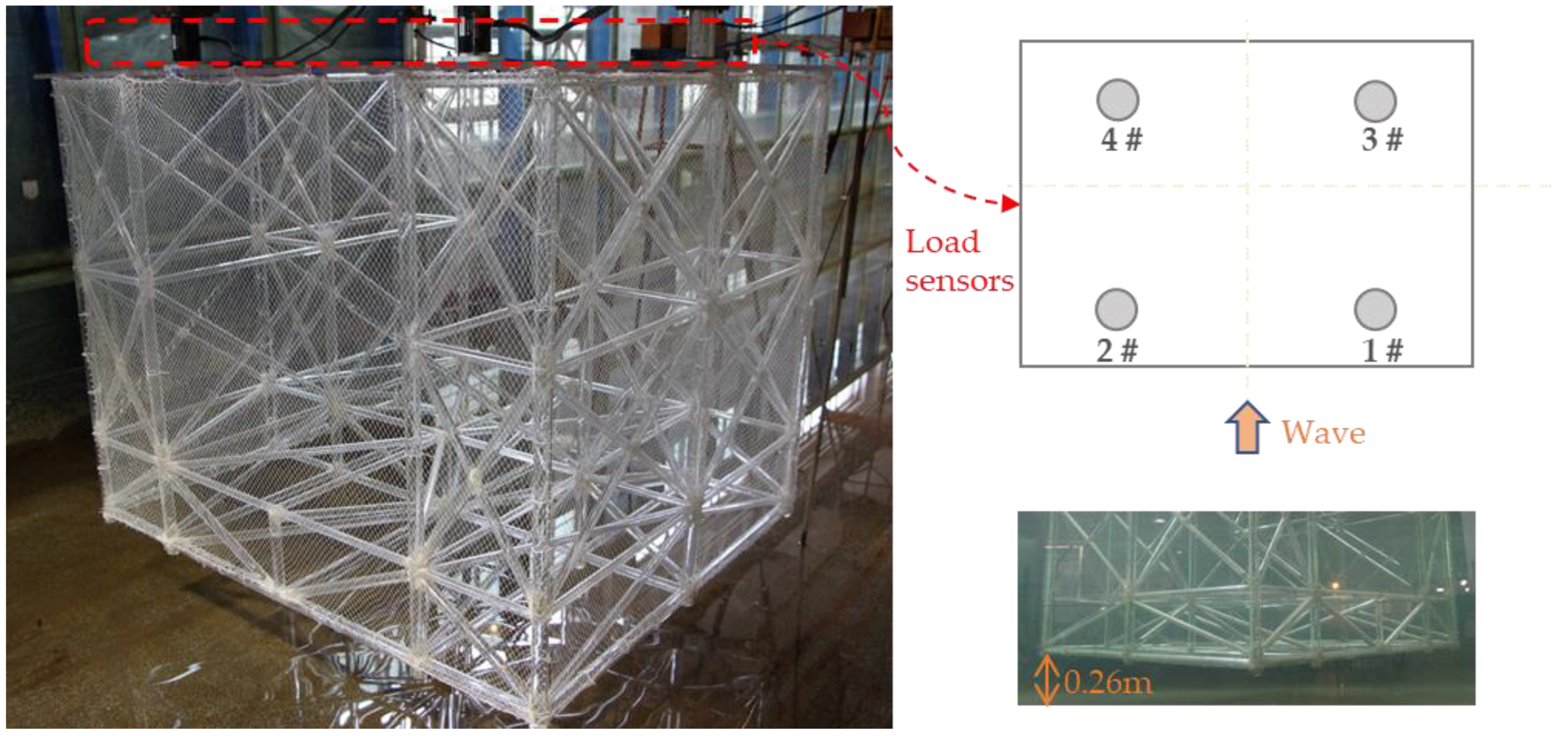
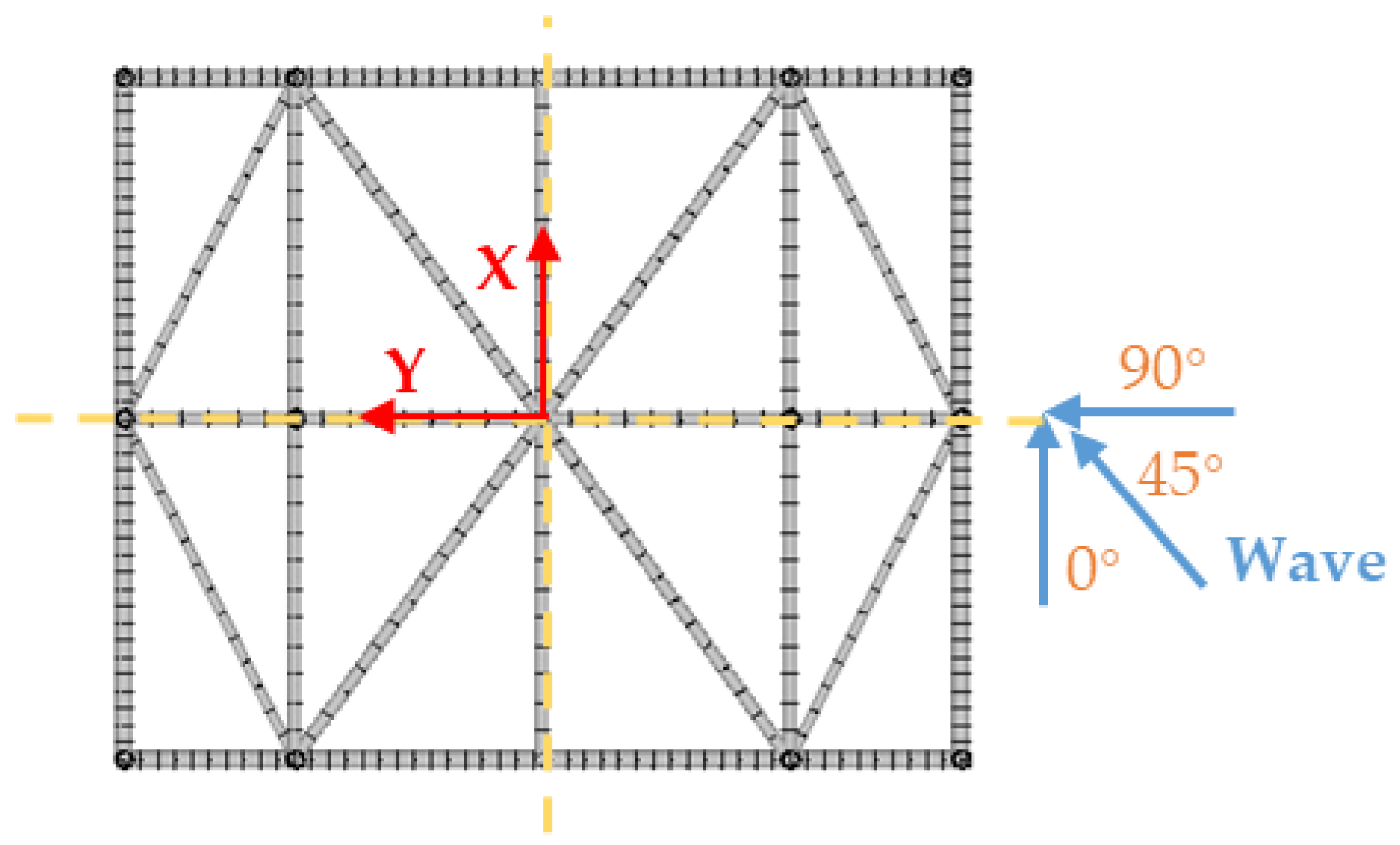
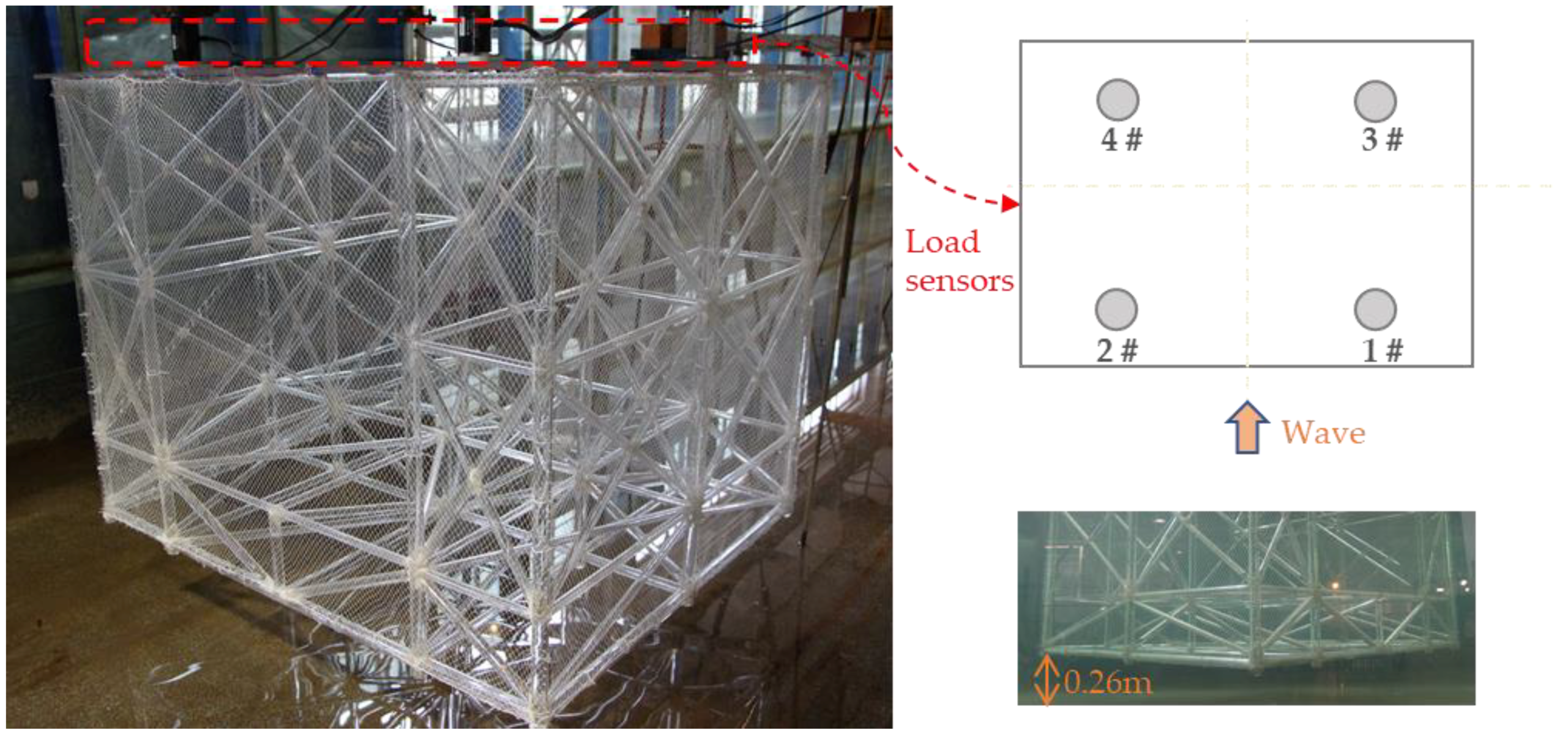
2.1. Experimental Model
2.2. Hydrodynamic Coefficient
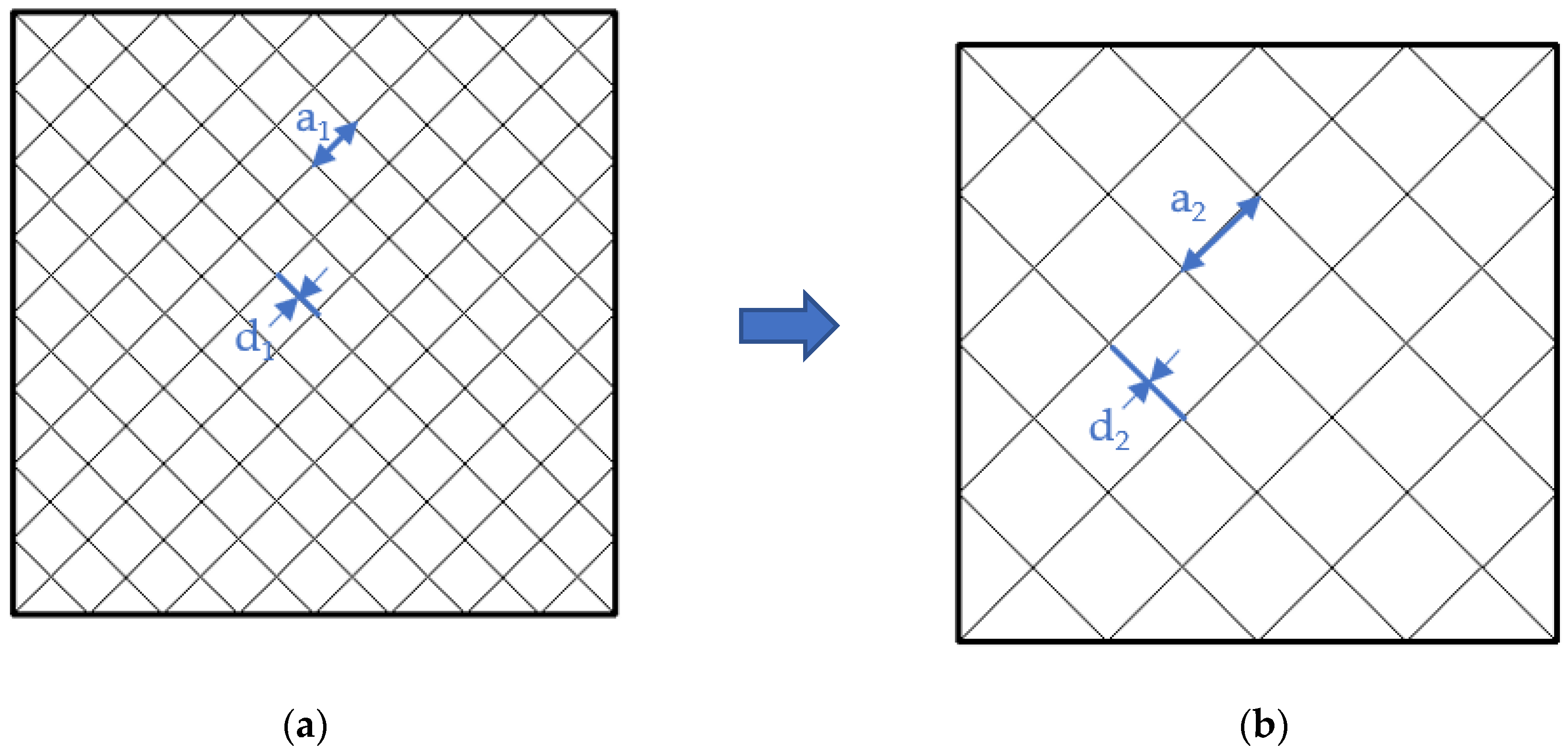
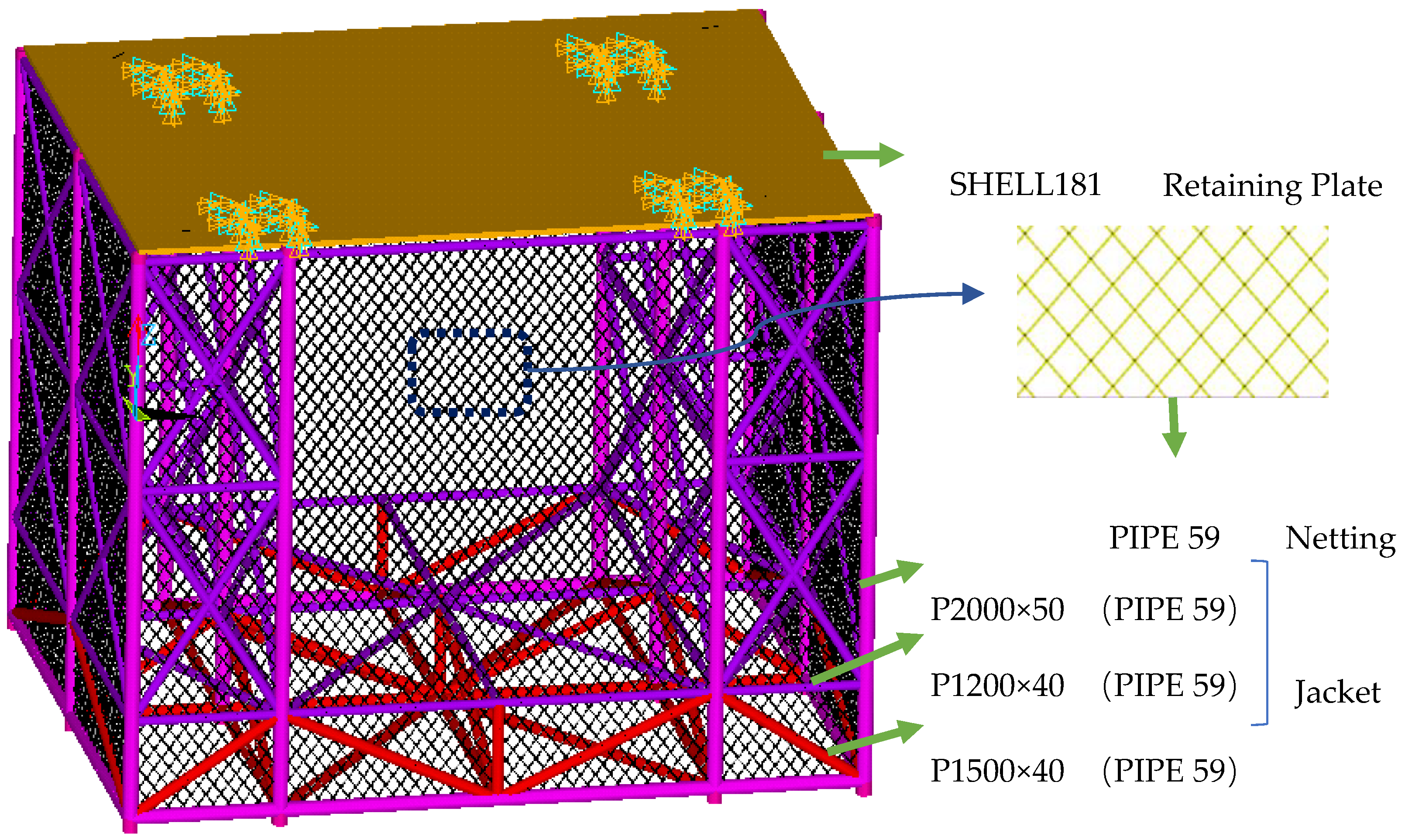
2.3. Numerical Model
3. Results
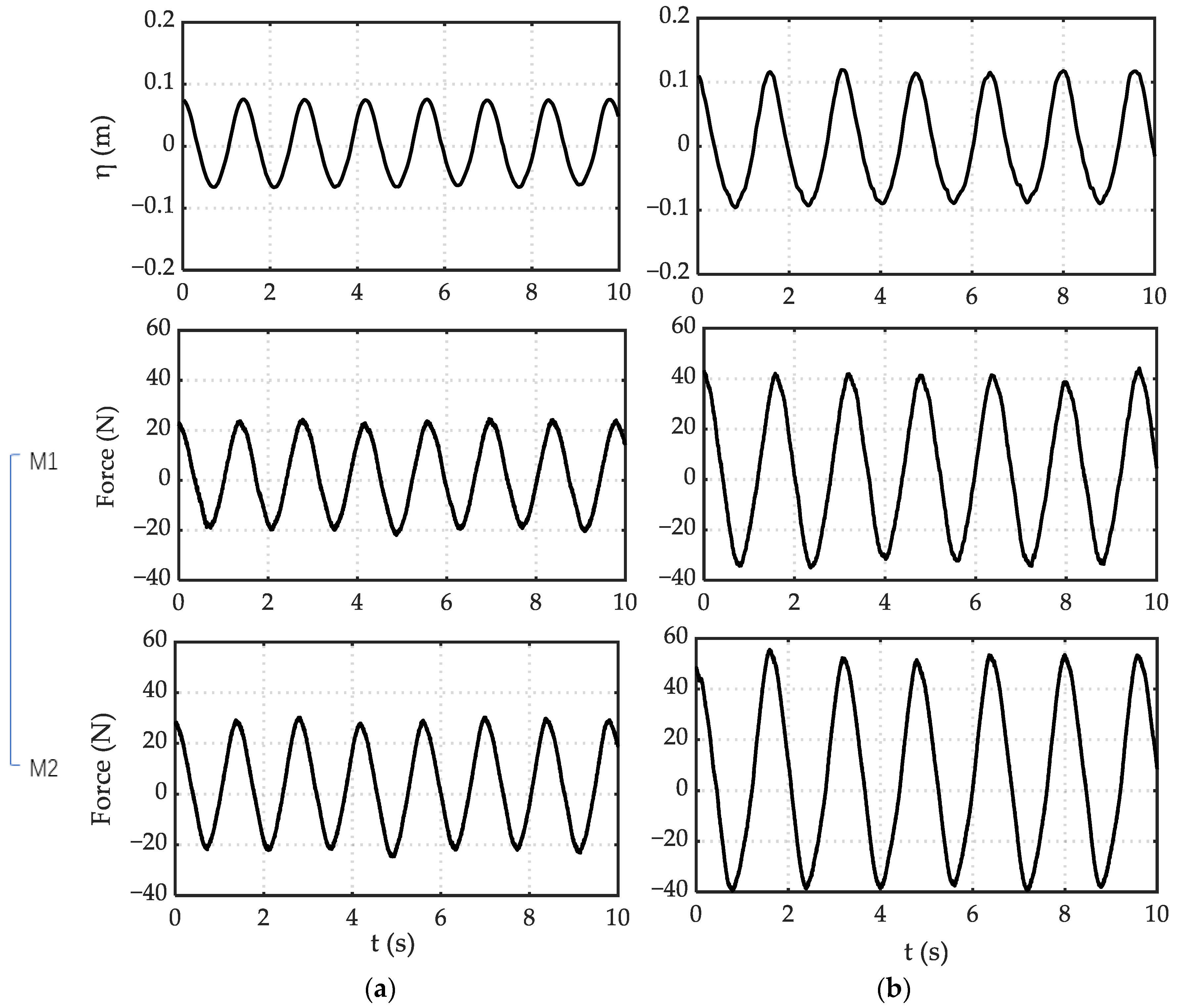
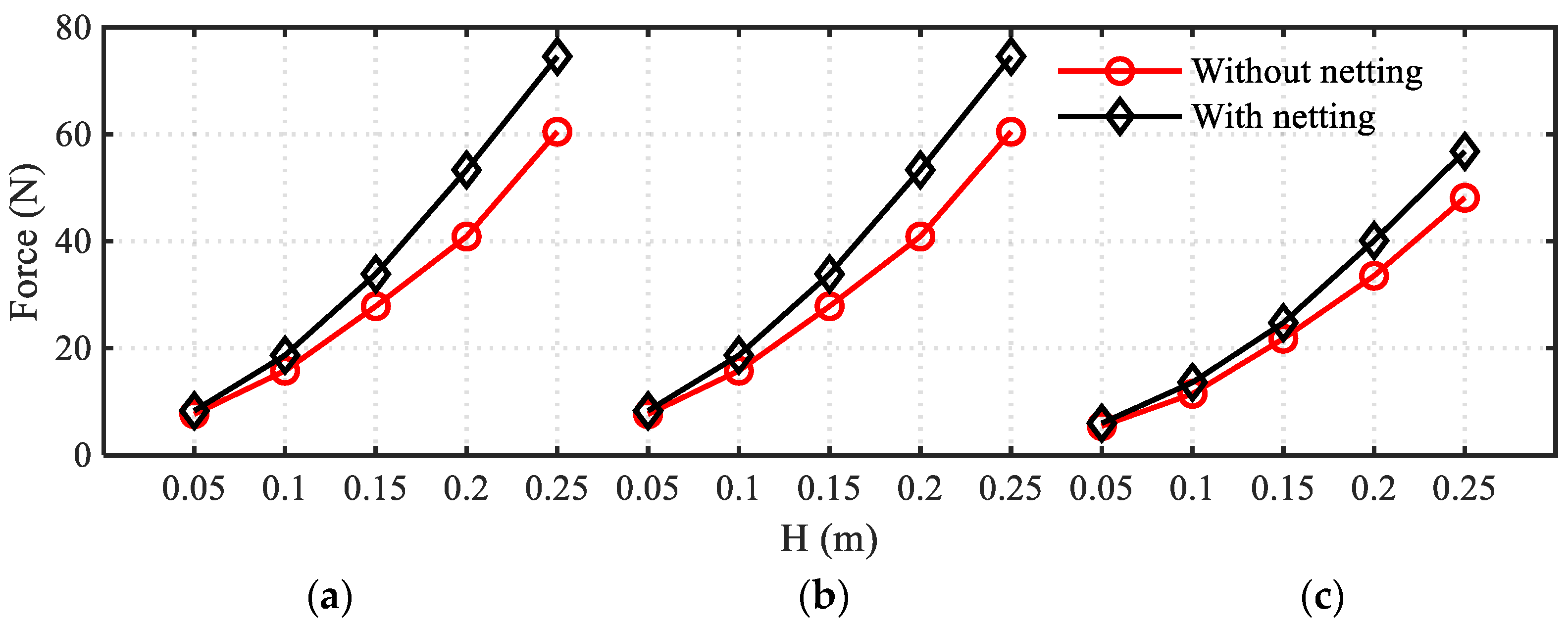
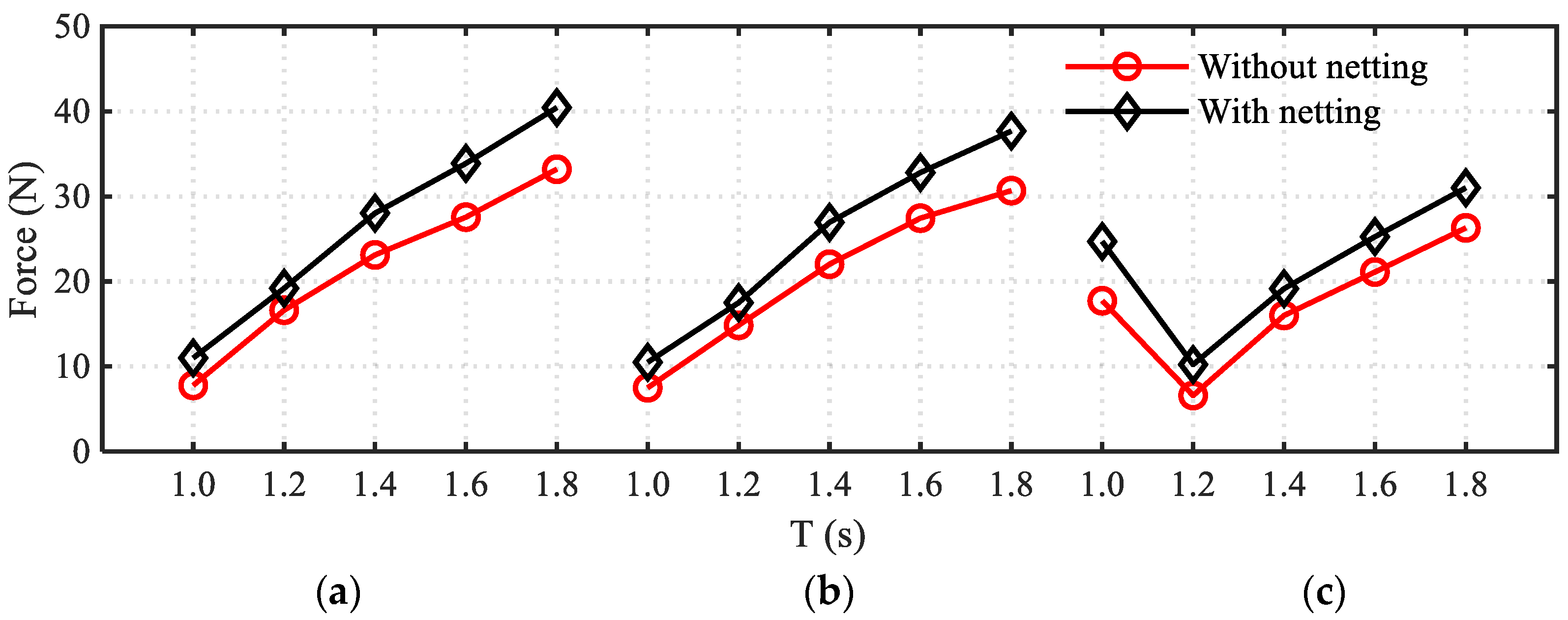
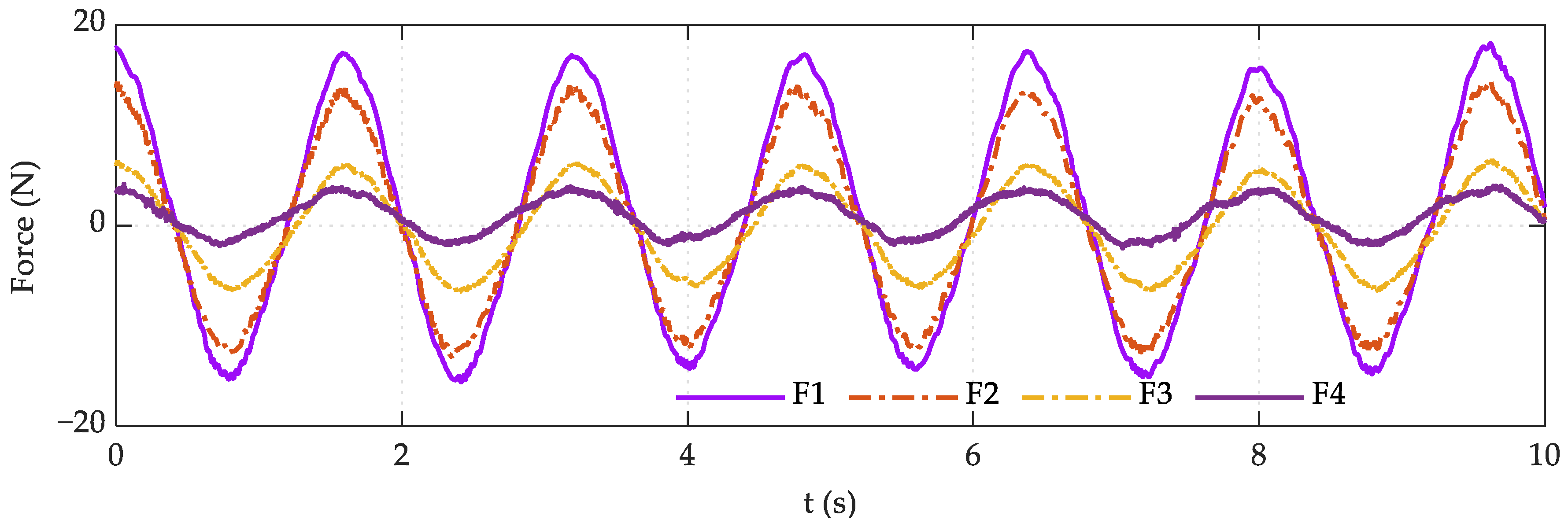
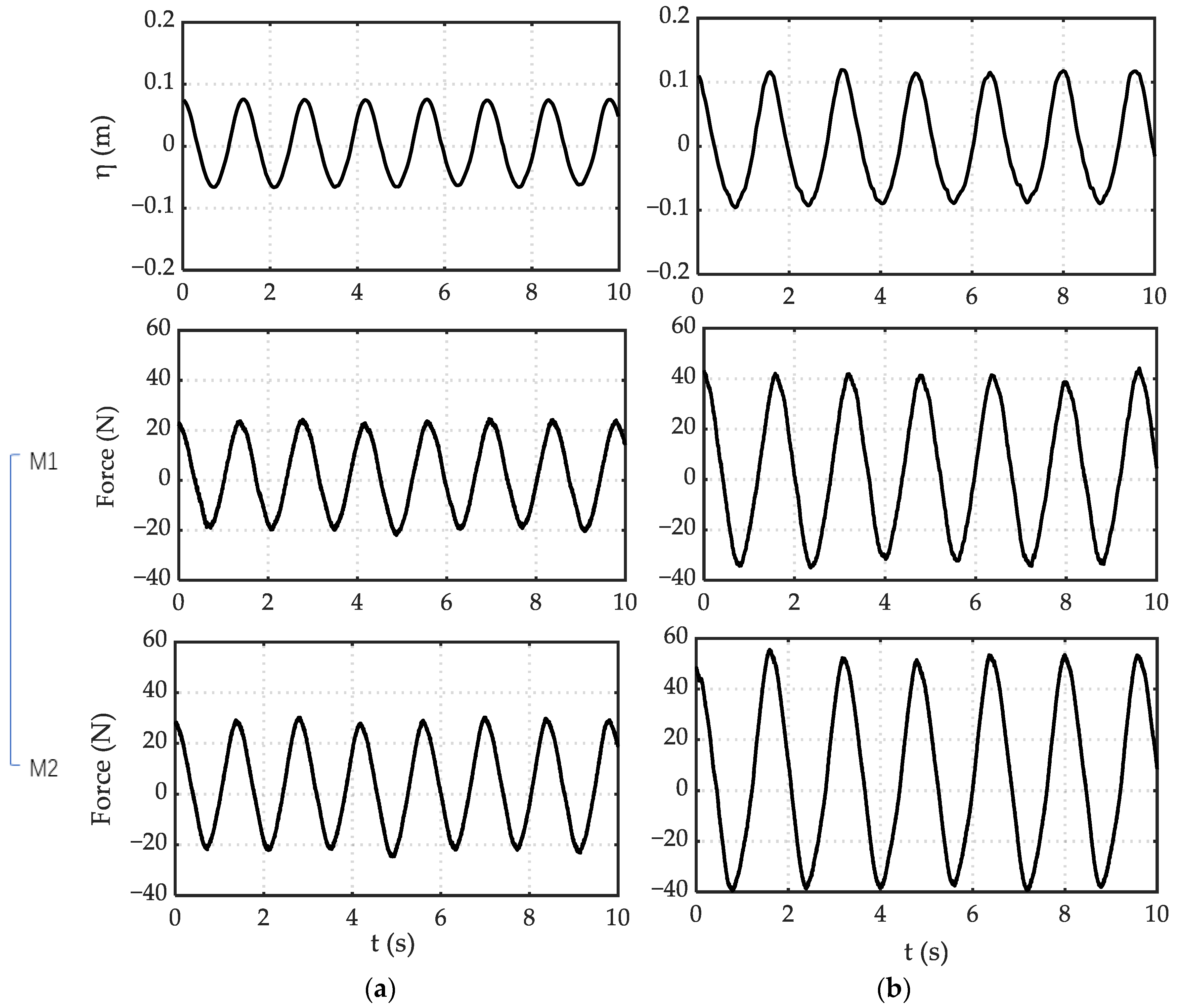
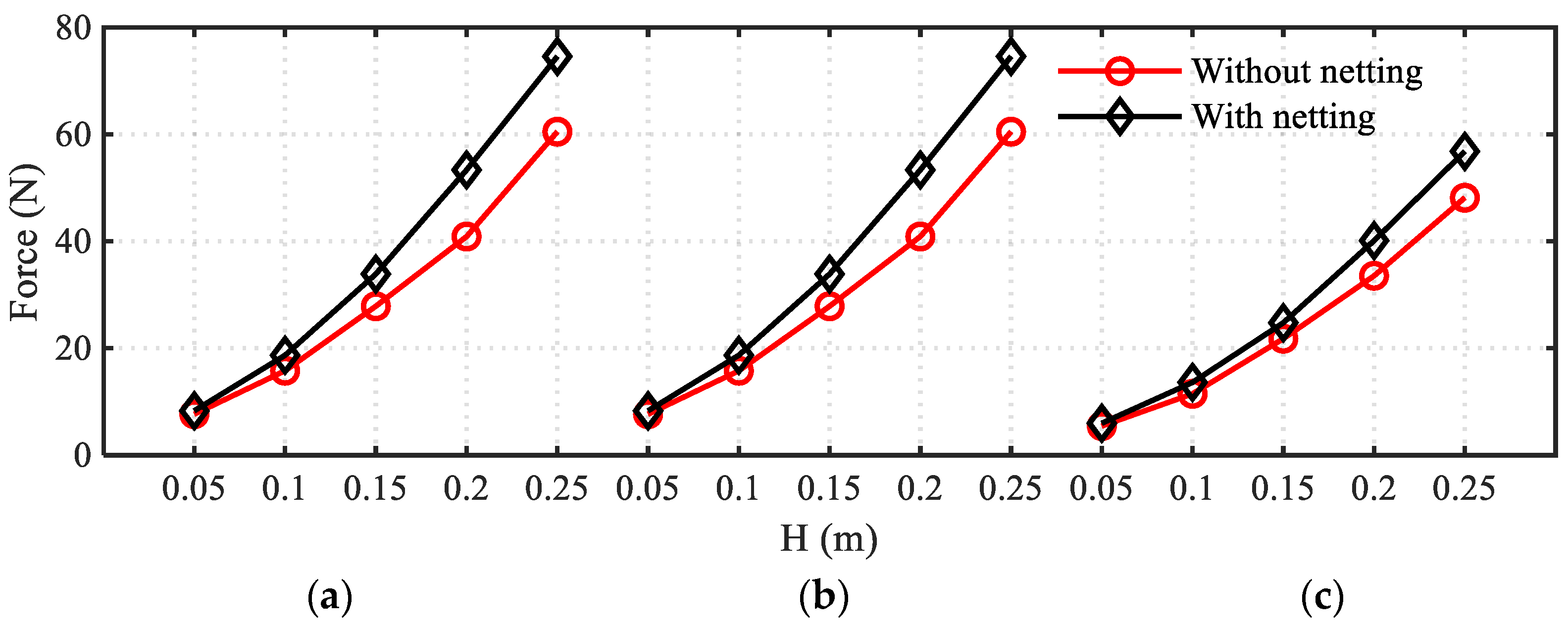
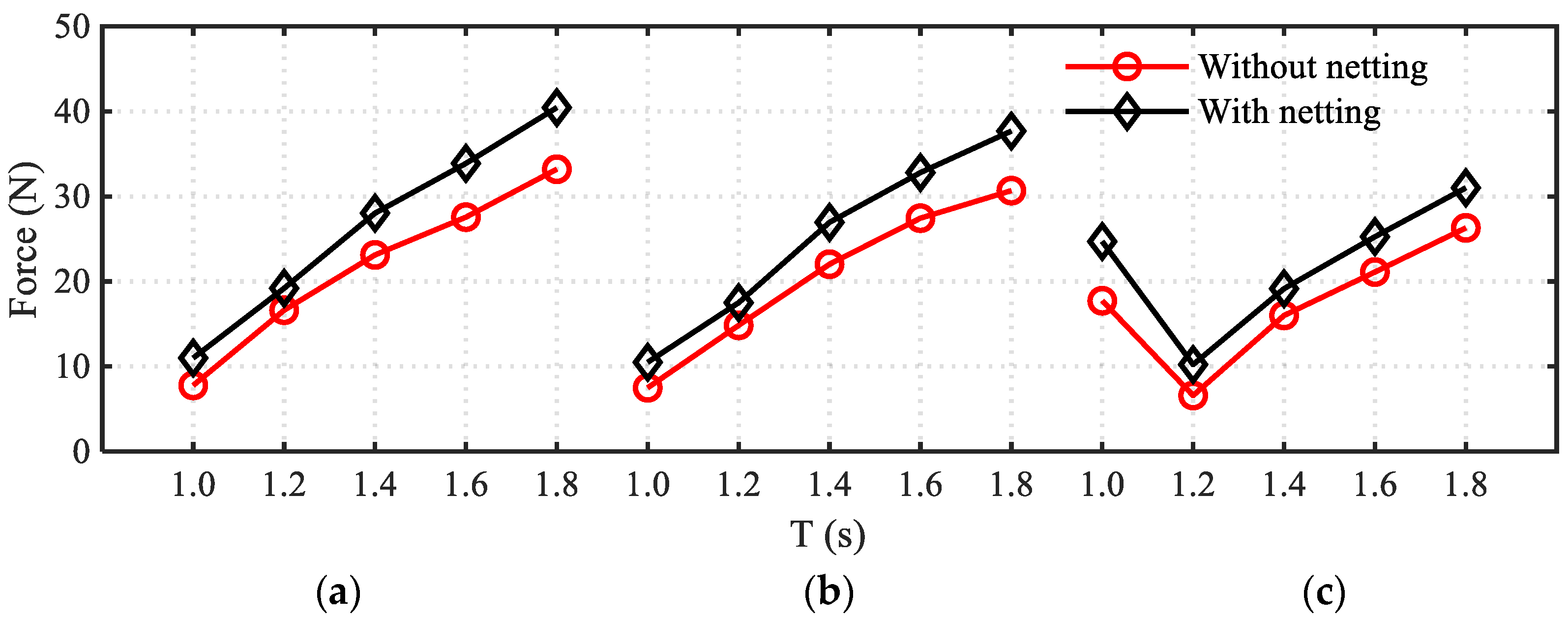
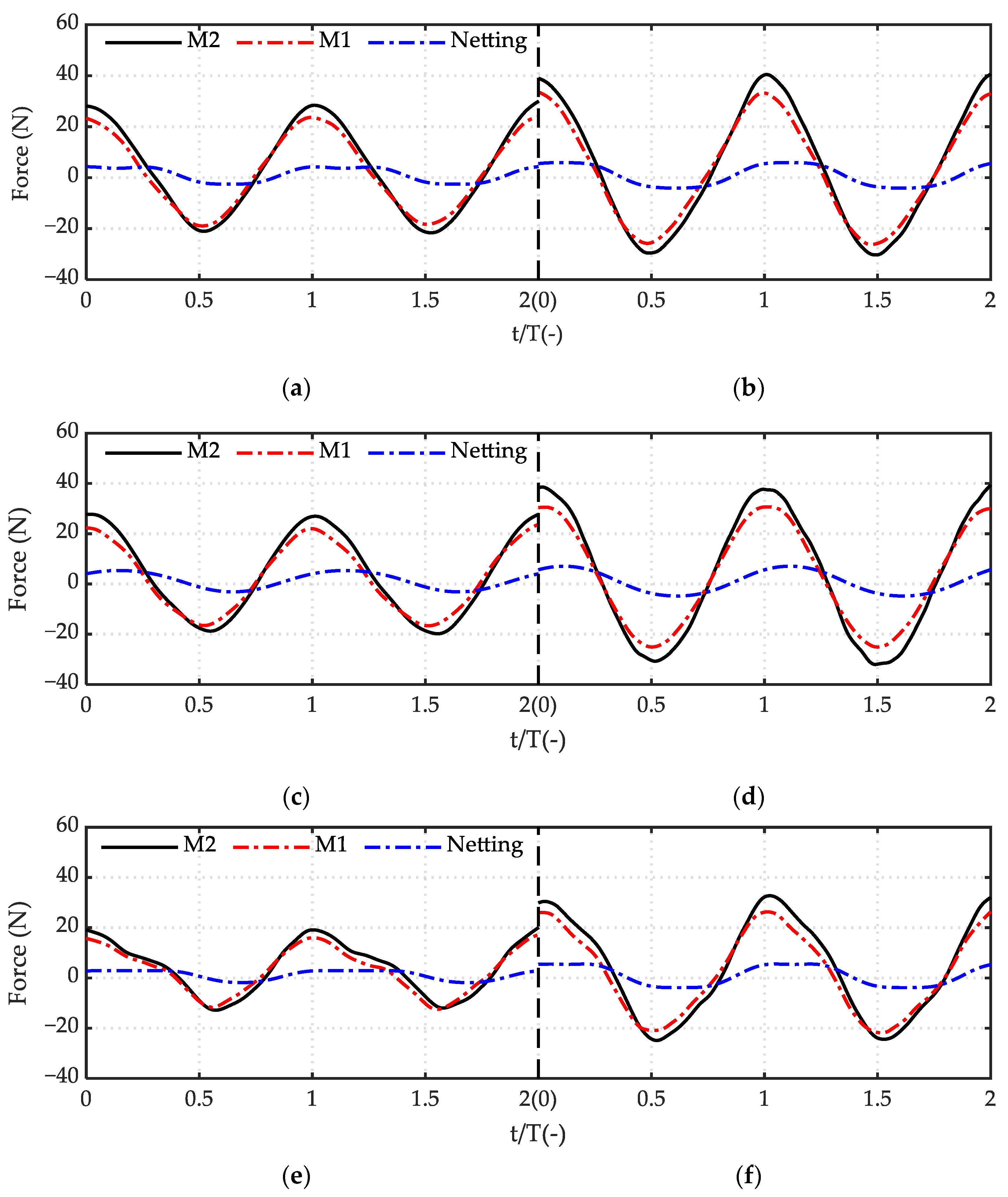
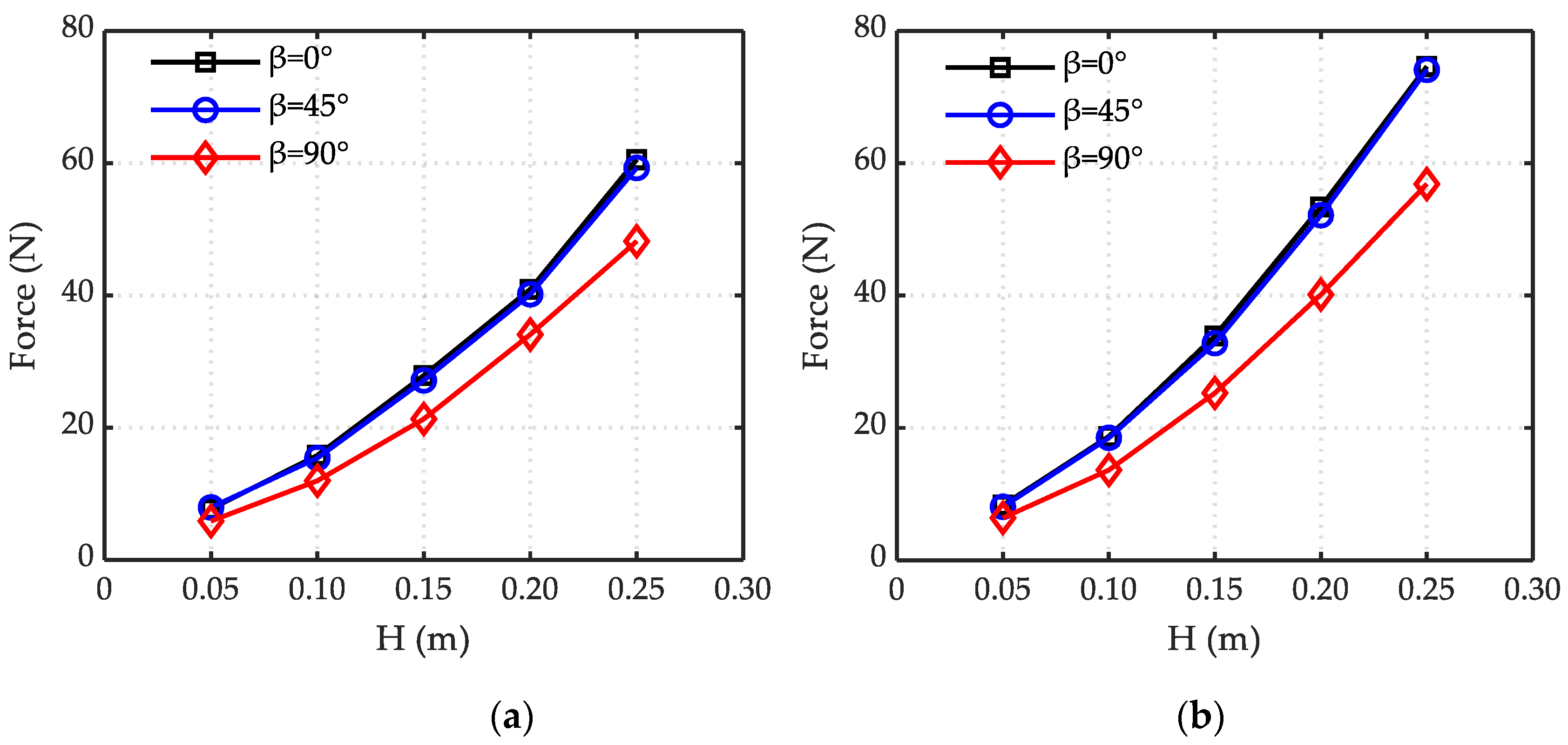
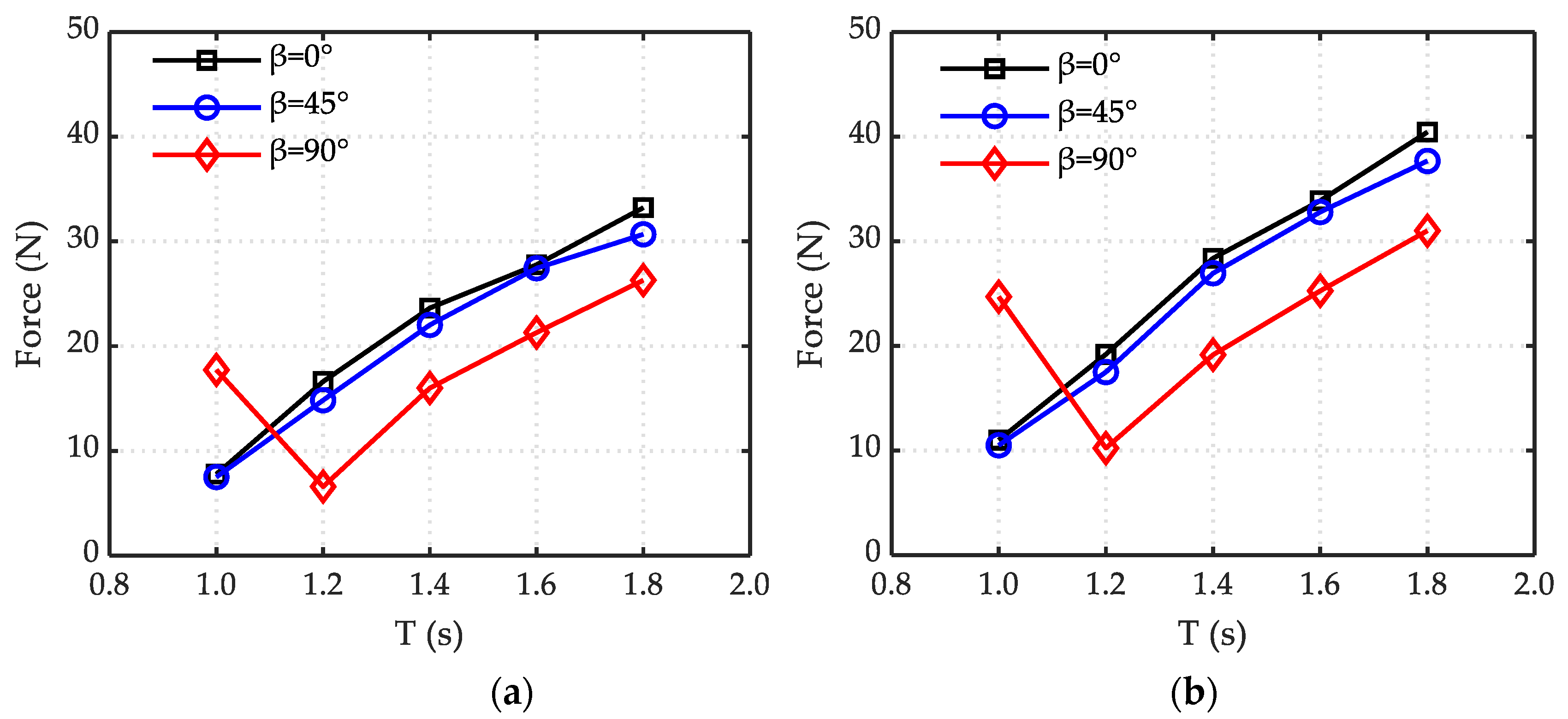
3.1. Horizontal Force on Various Models in Waves
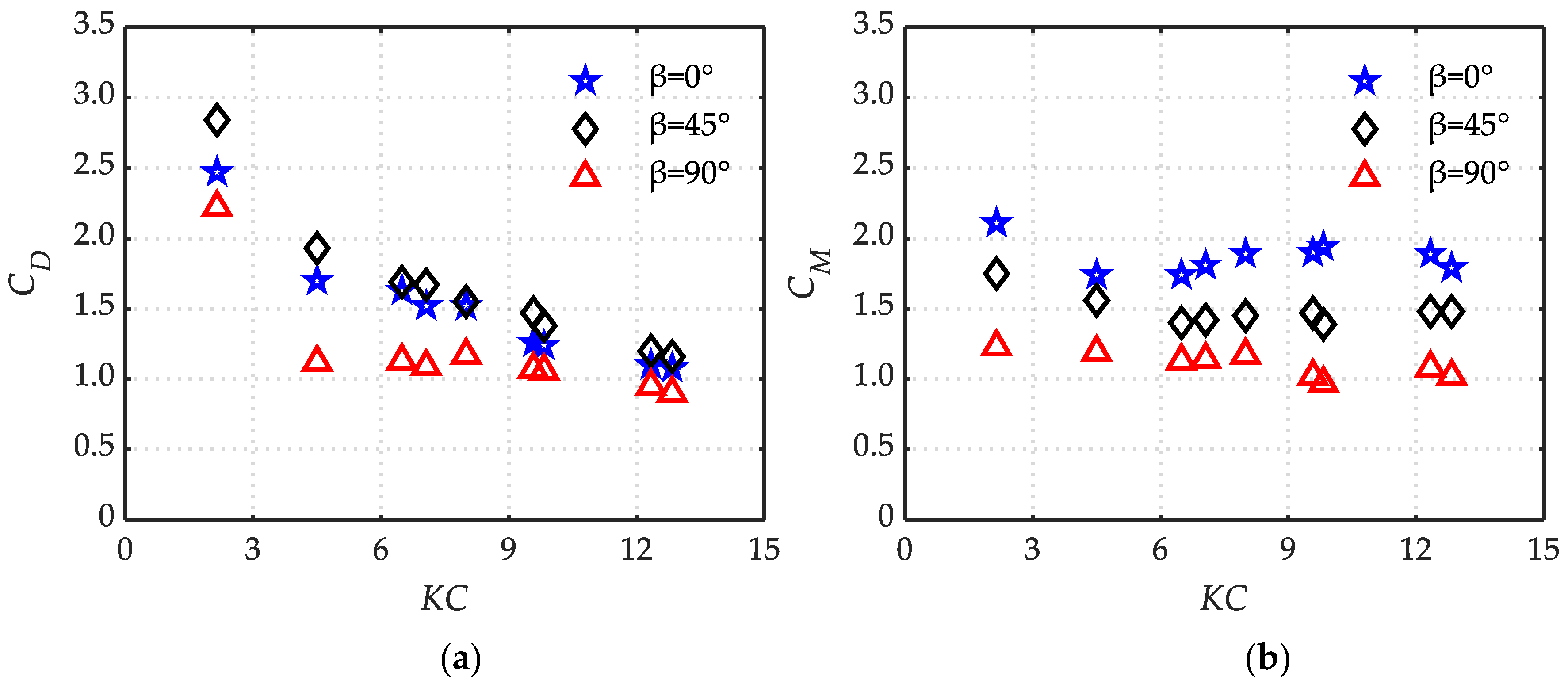
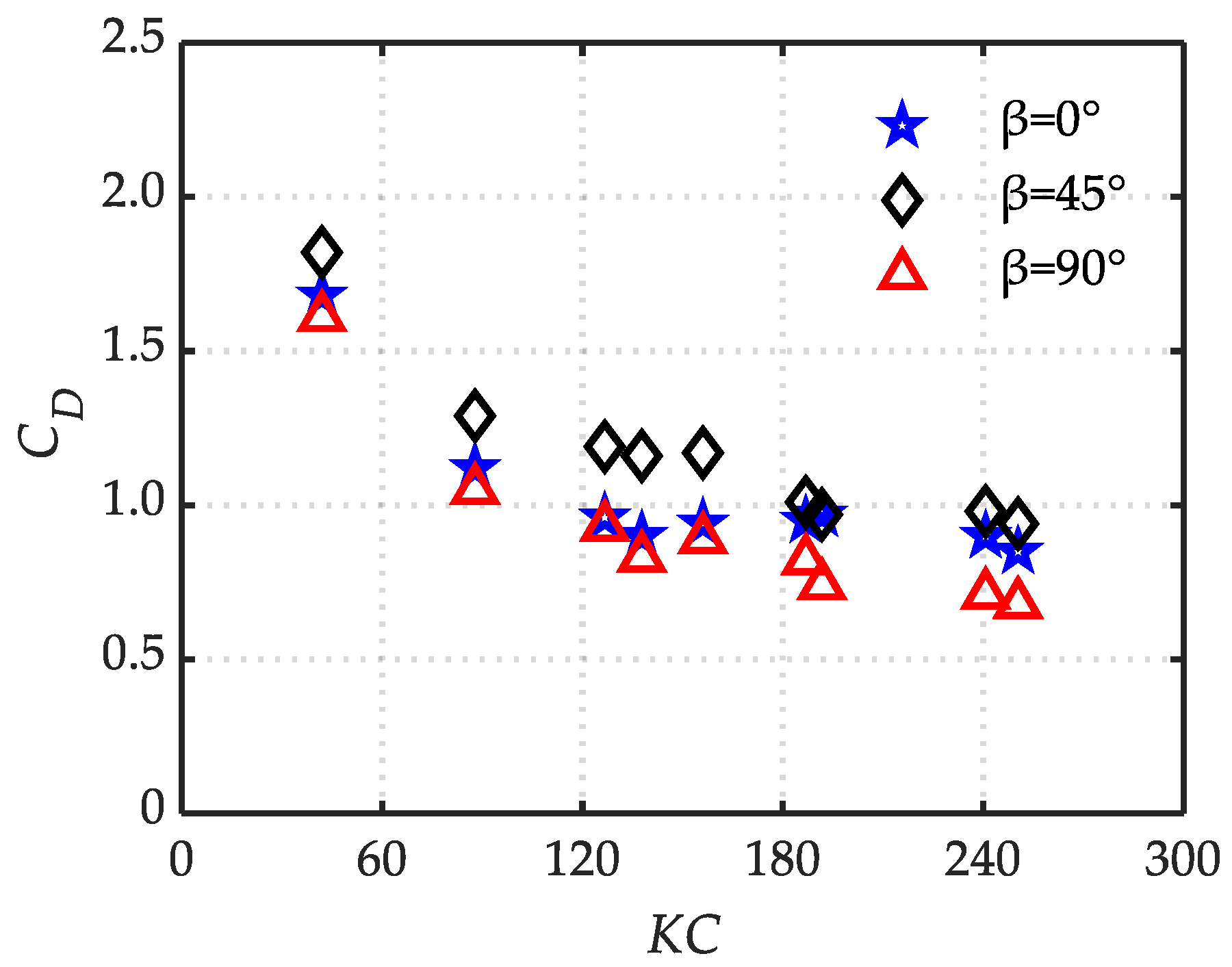
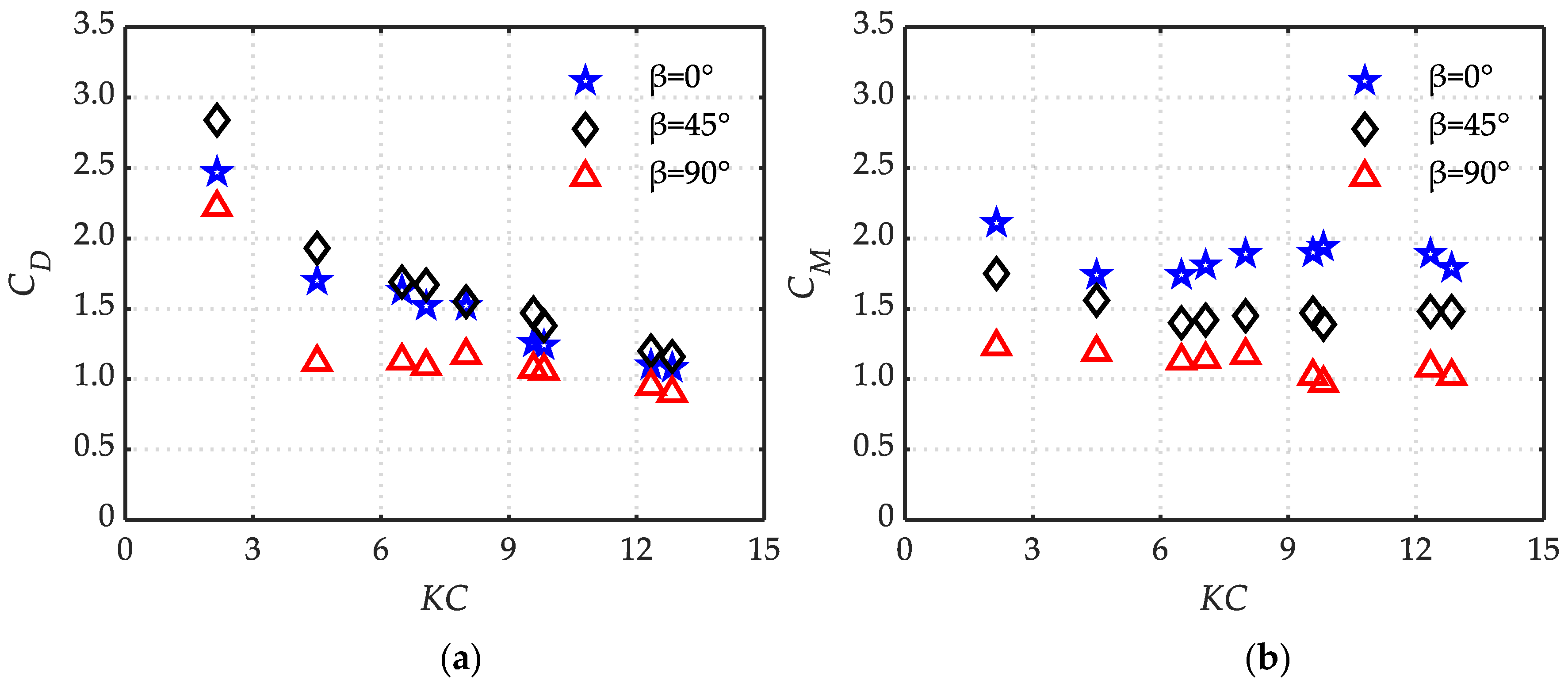
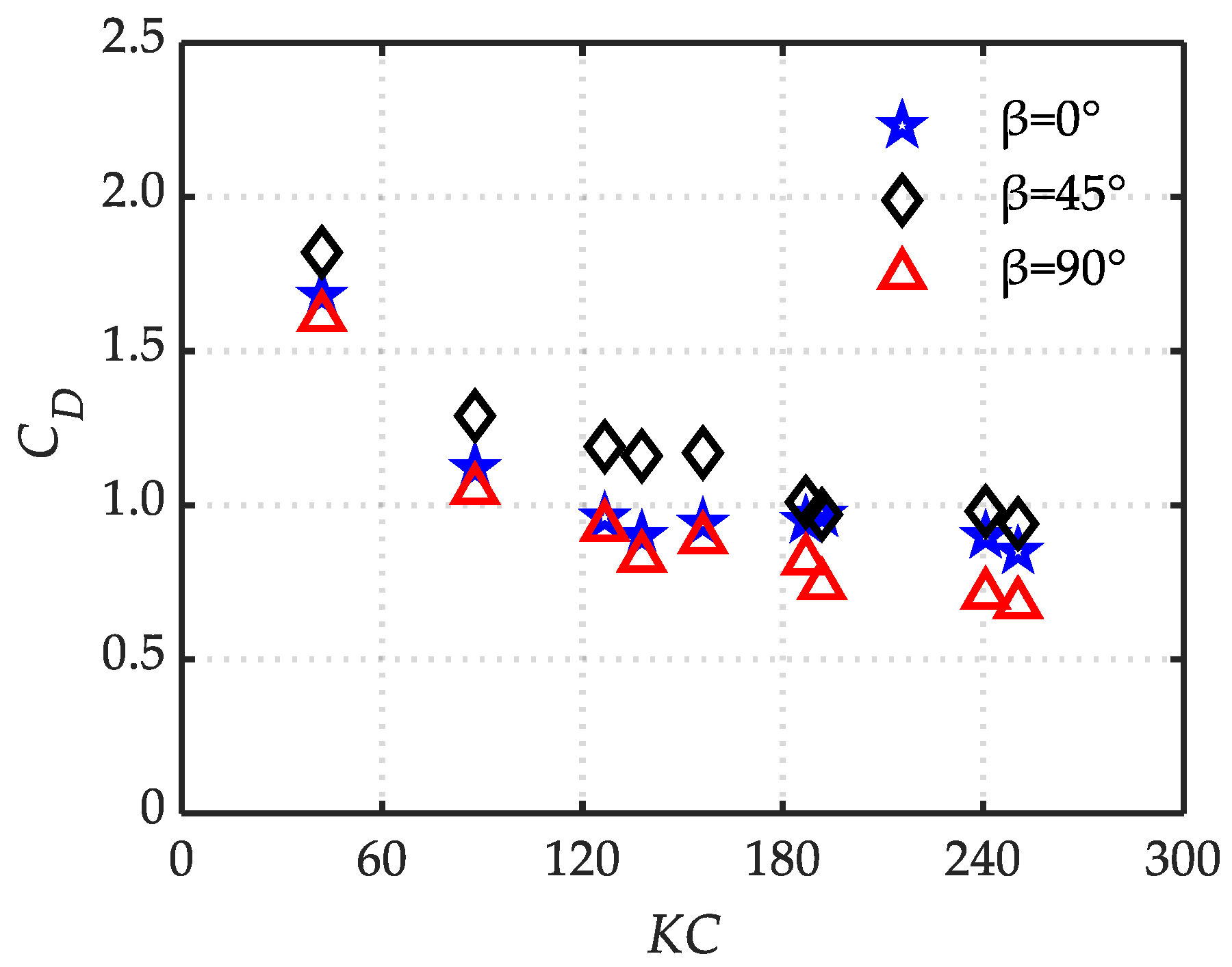
3.2. Hydrodynamic Coefficients of Various Models in Waves
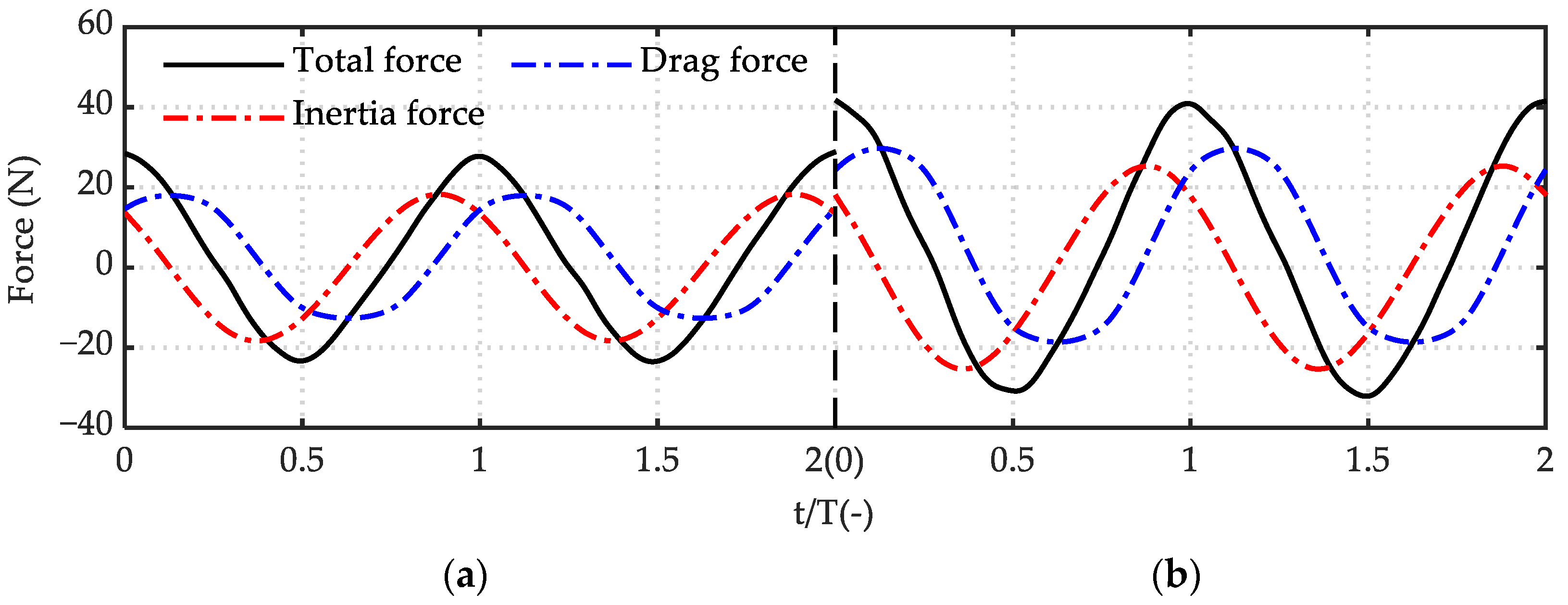
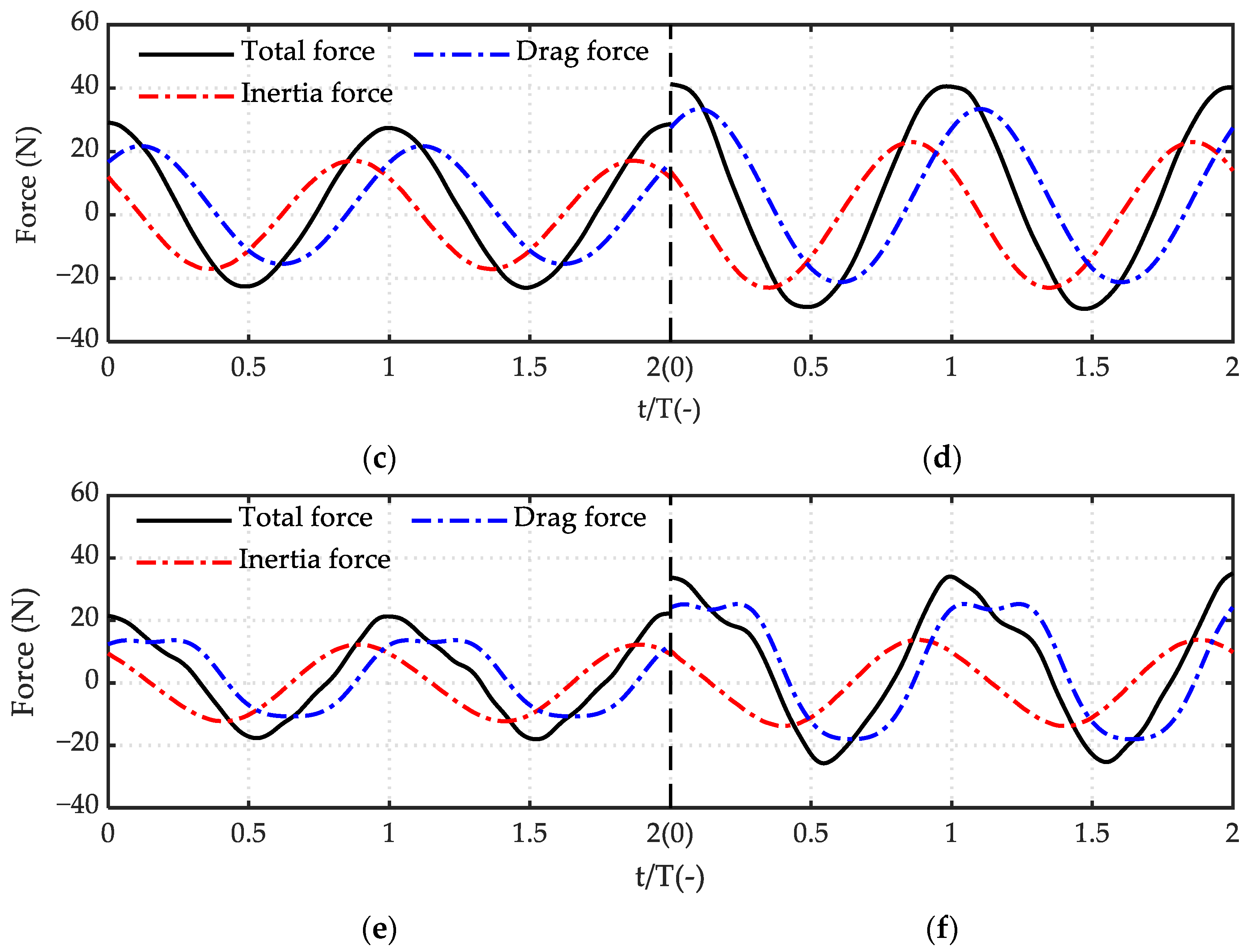
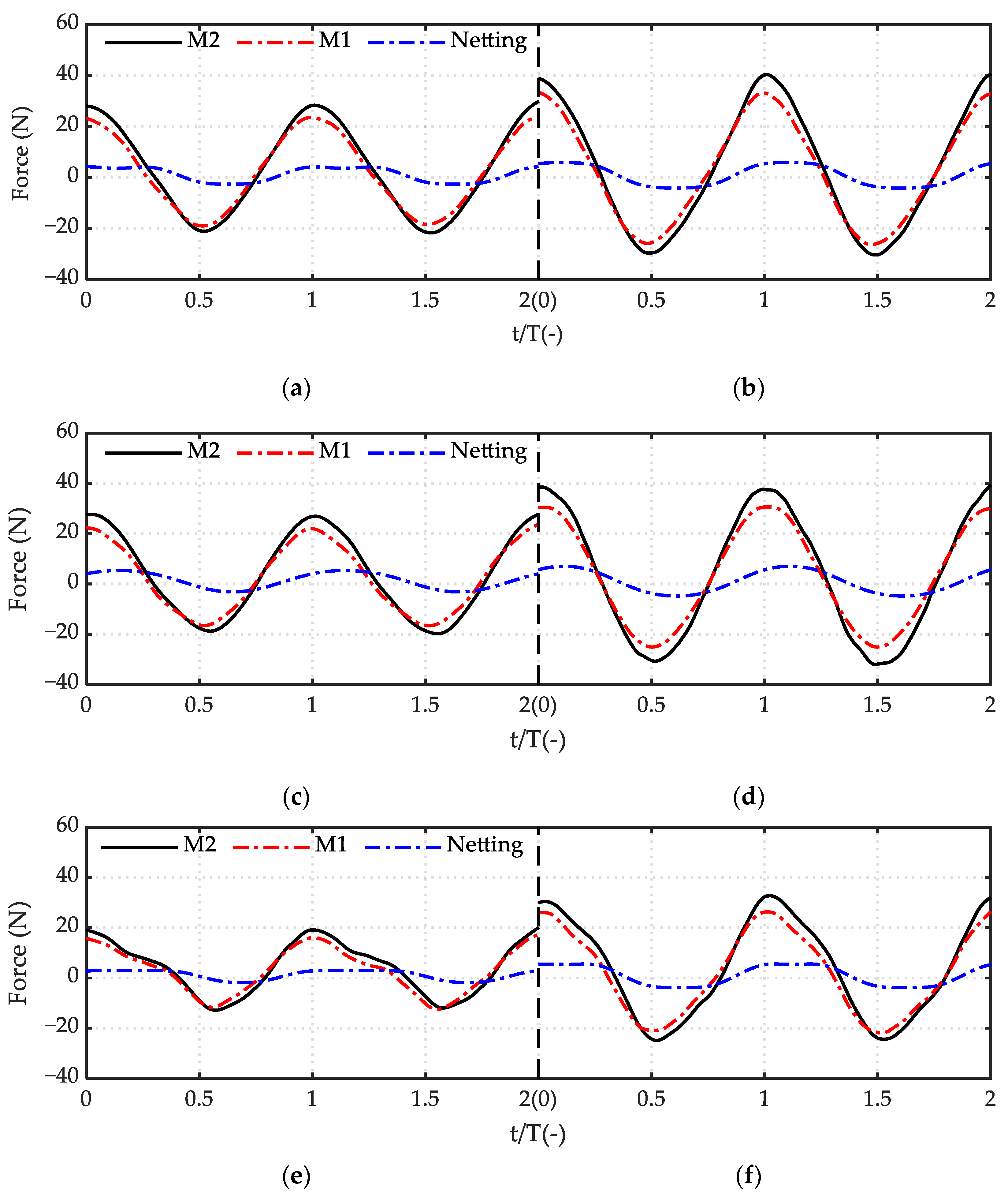
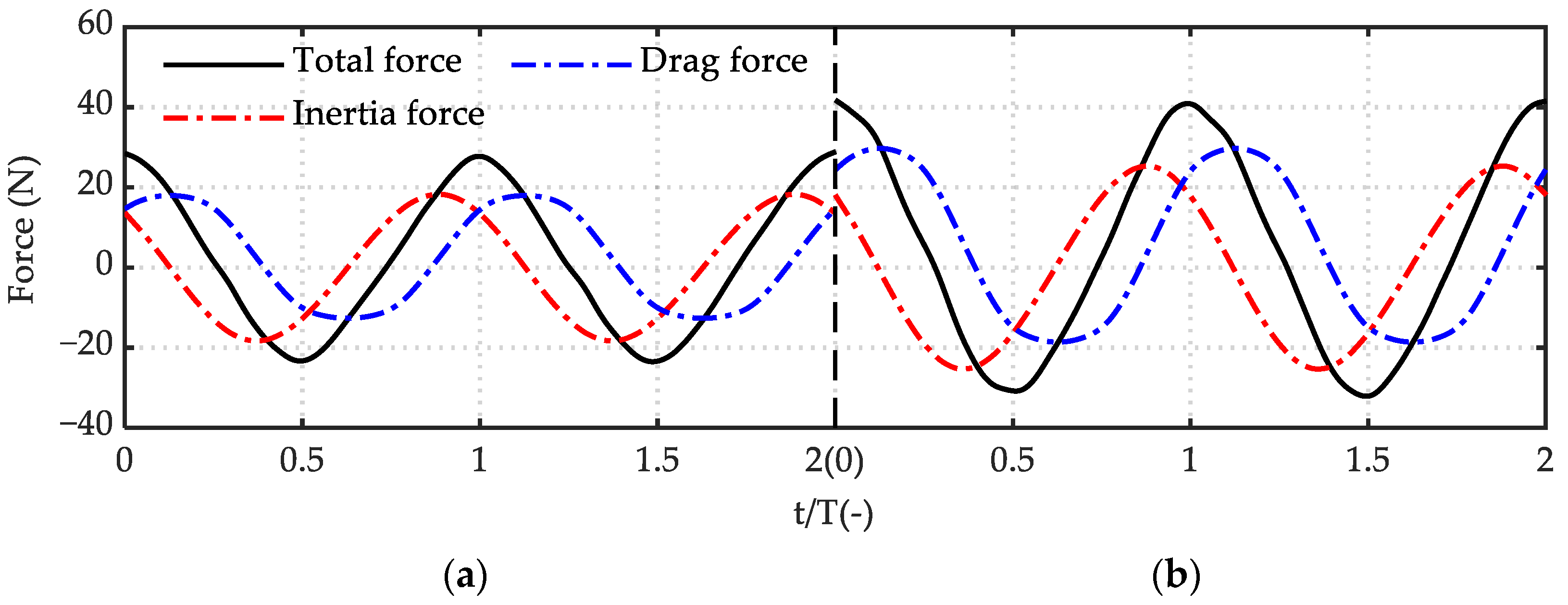
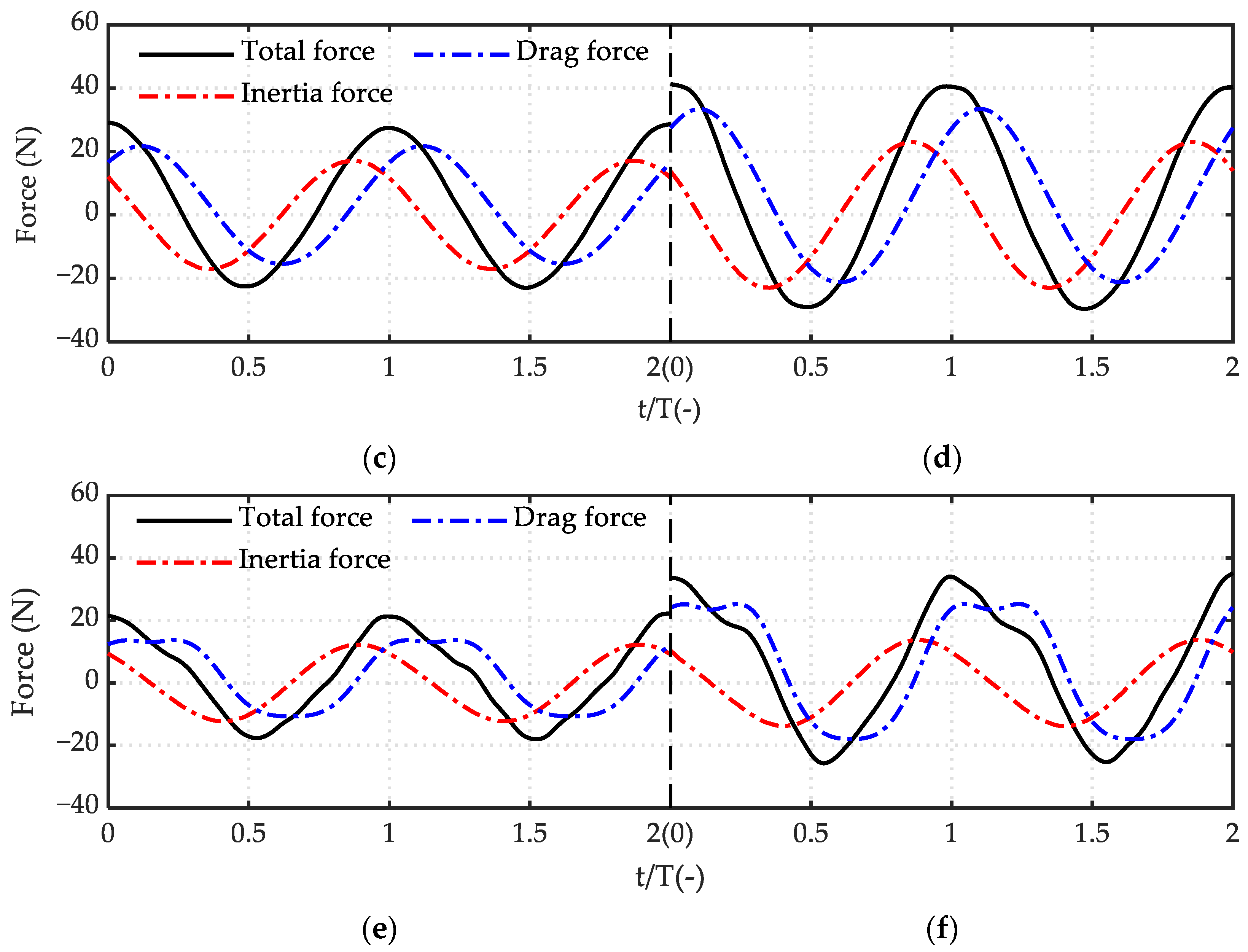
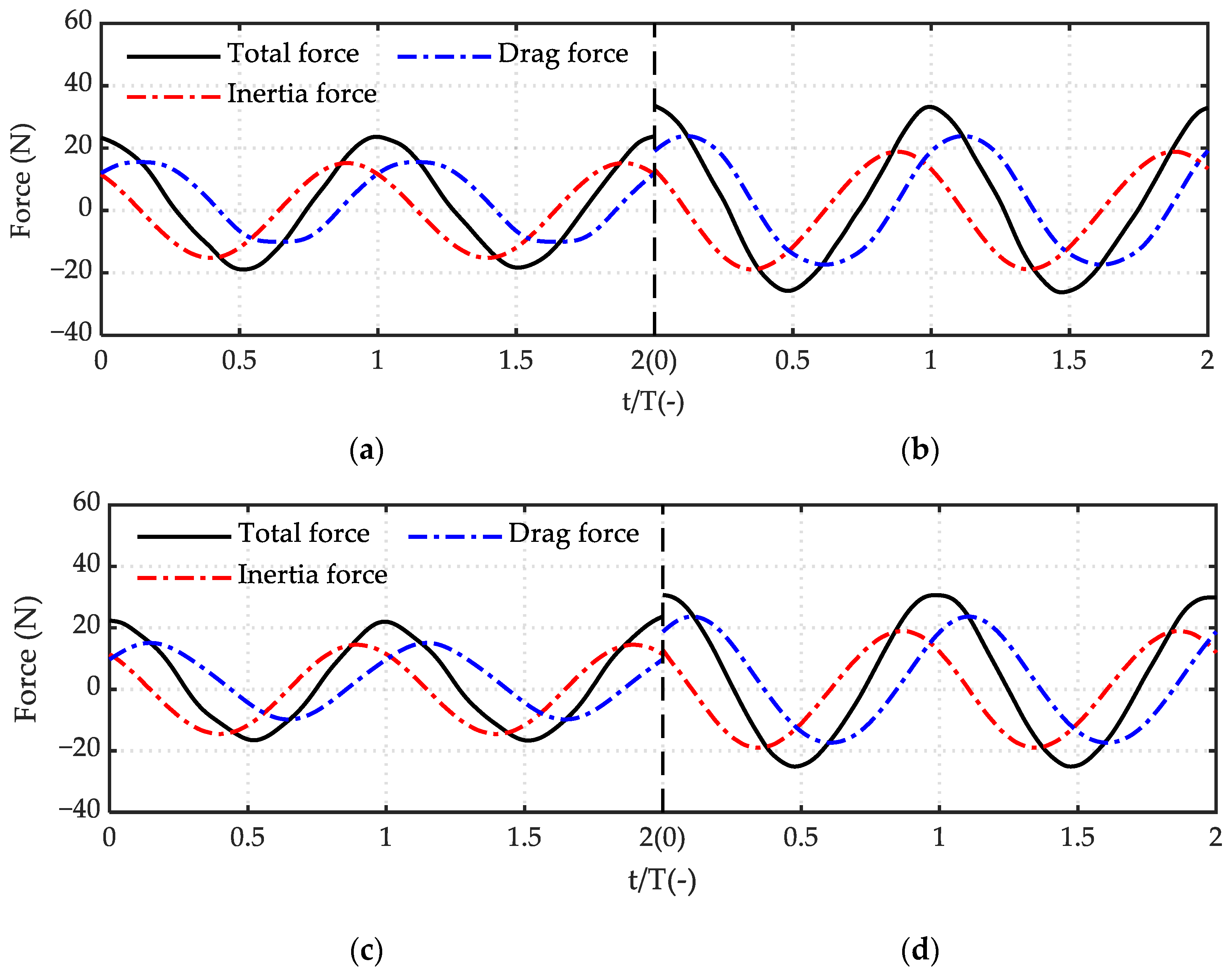
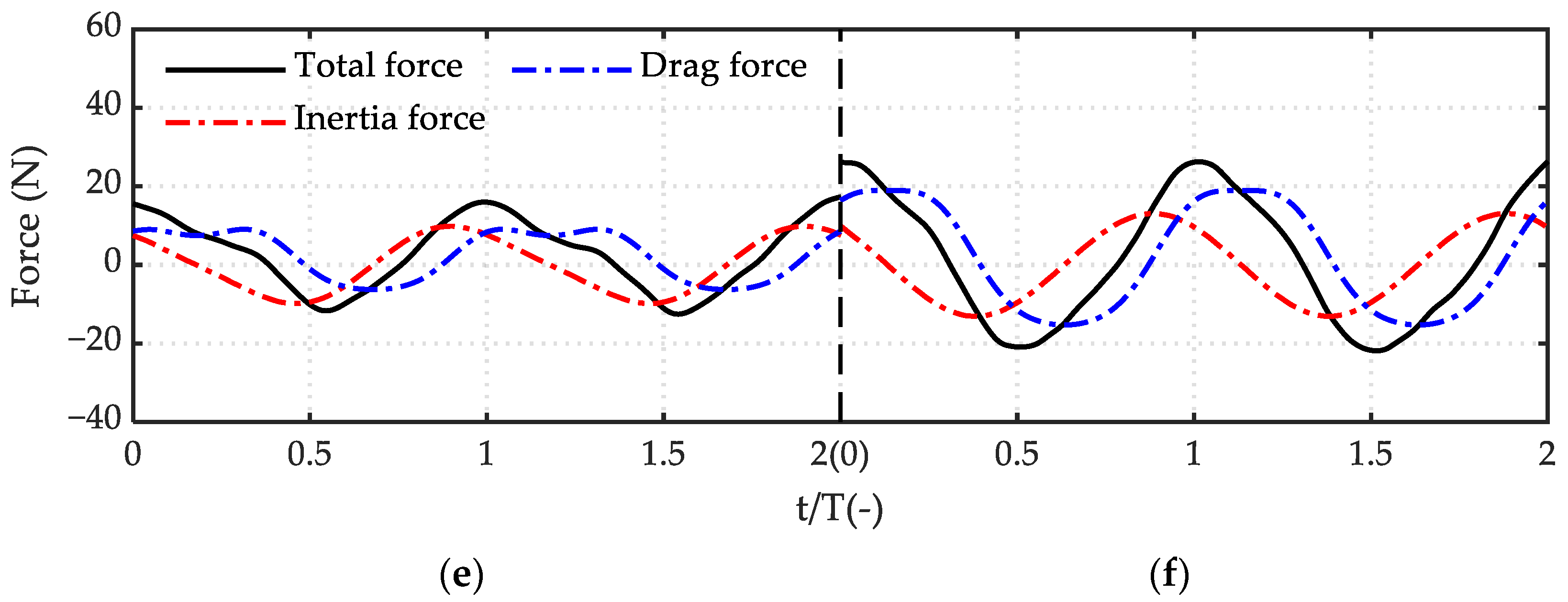
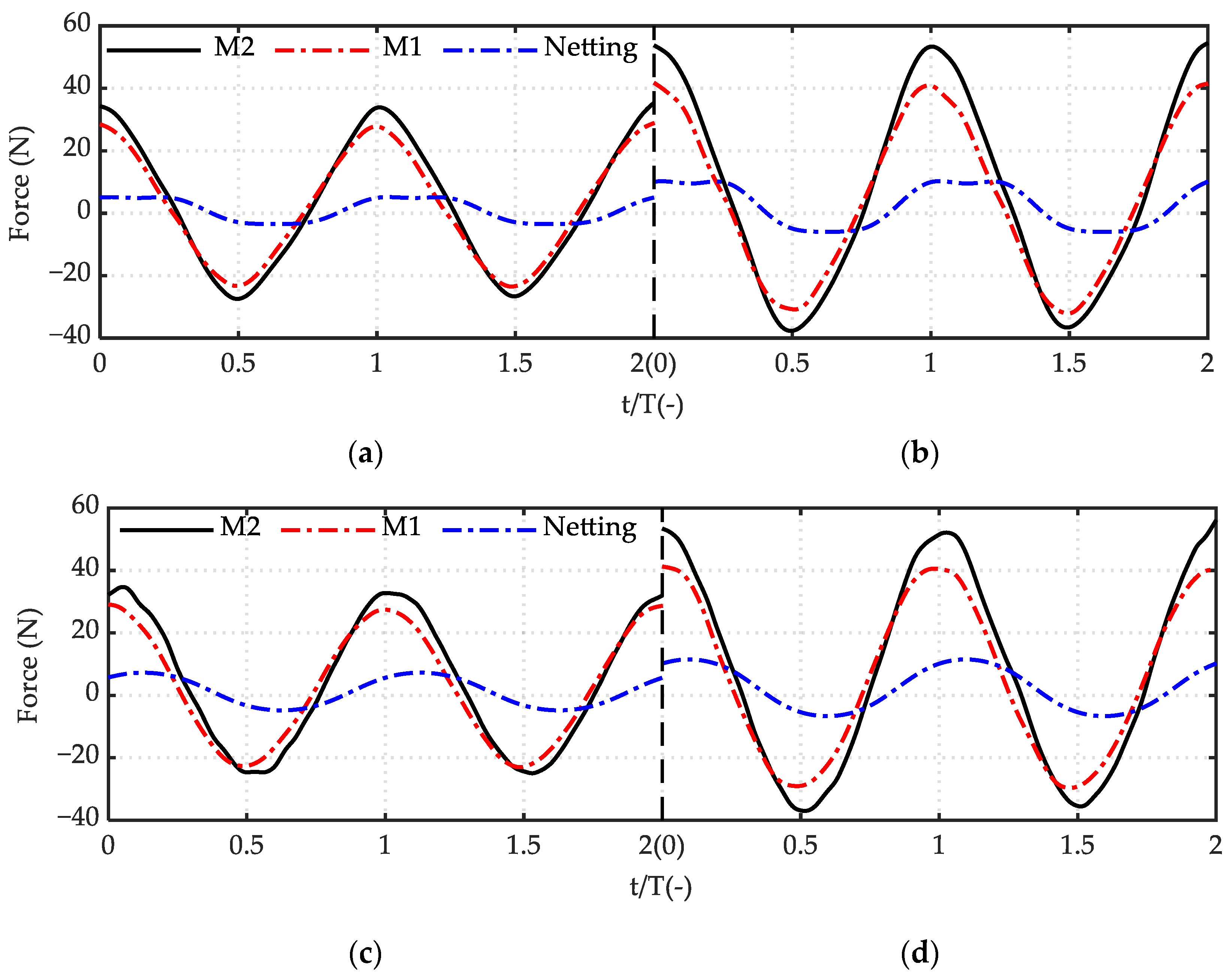
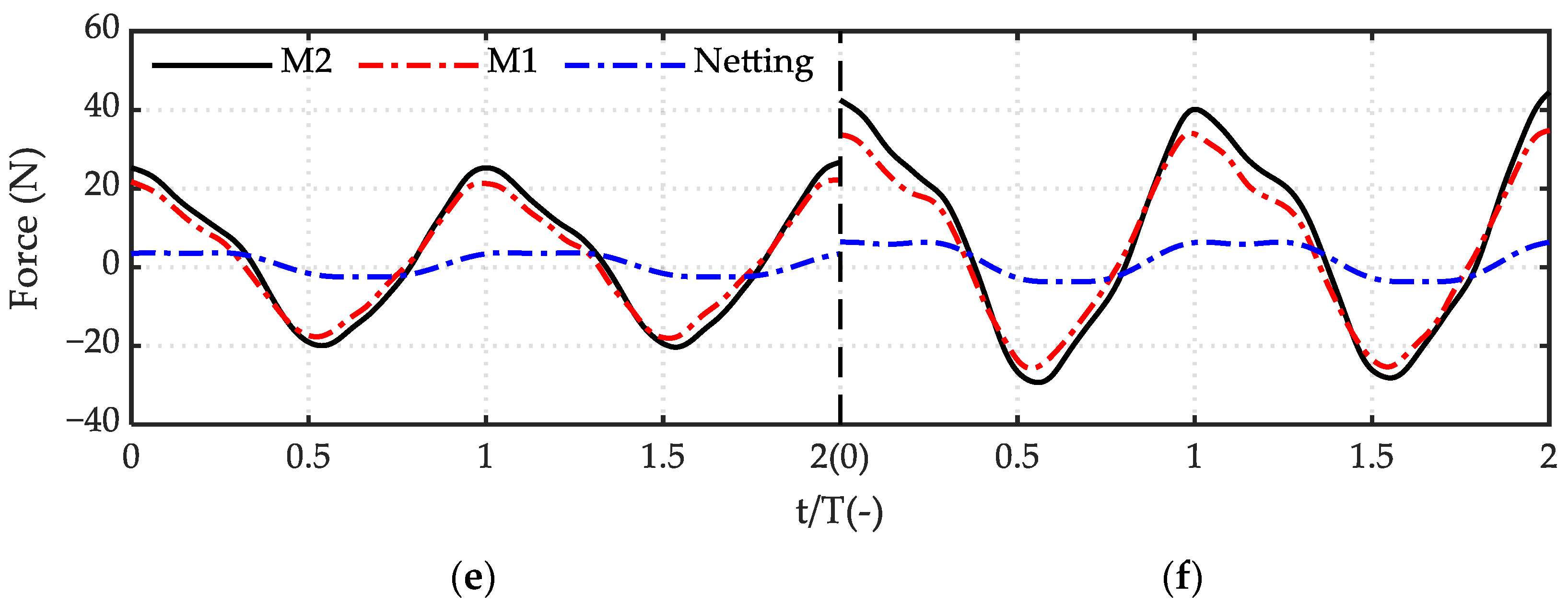
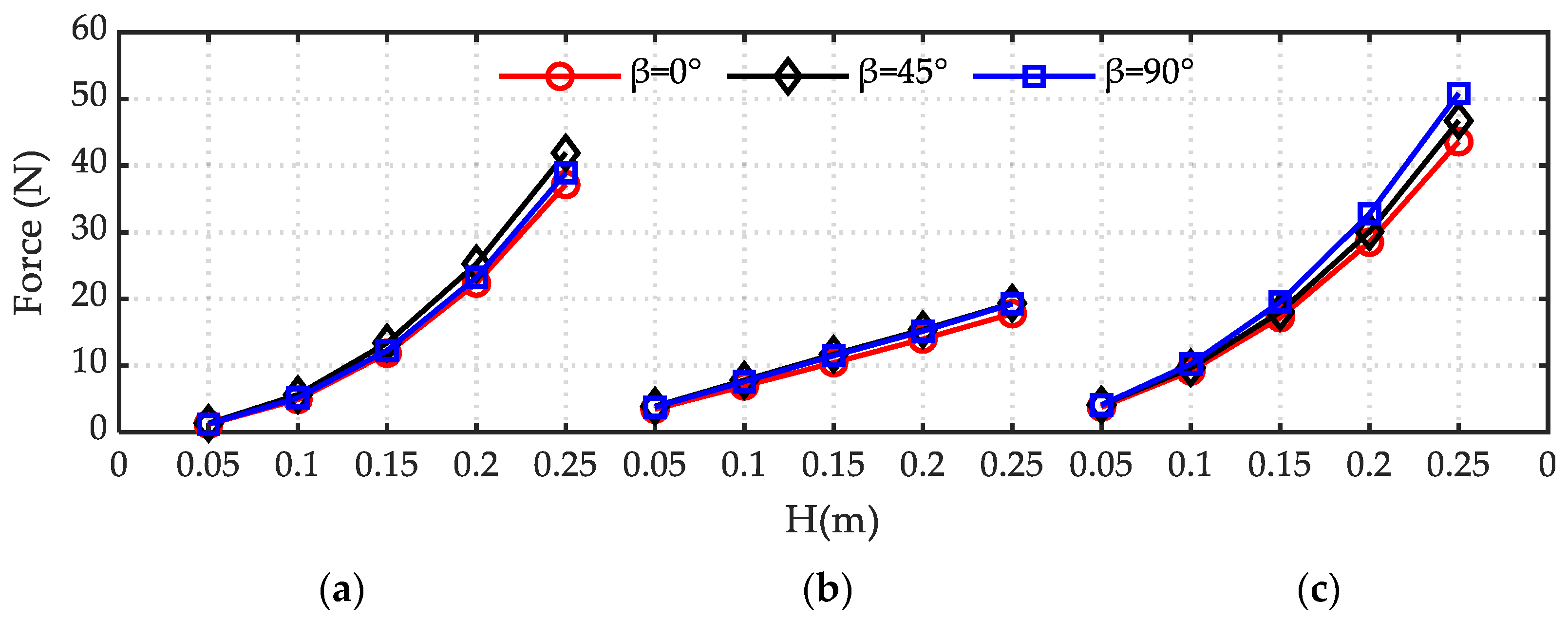
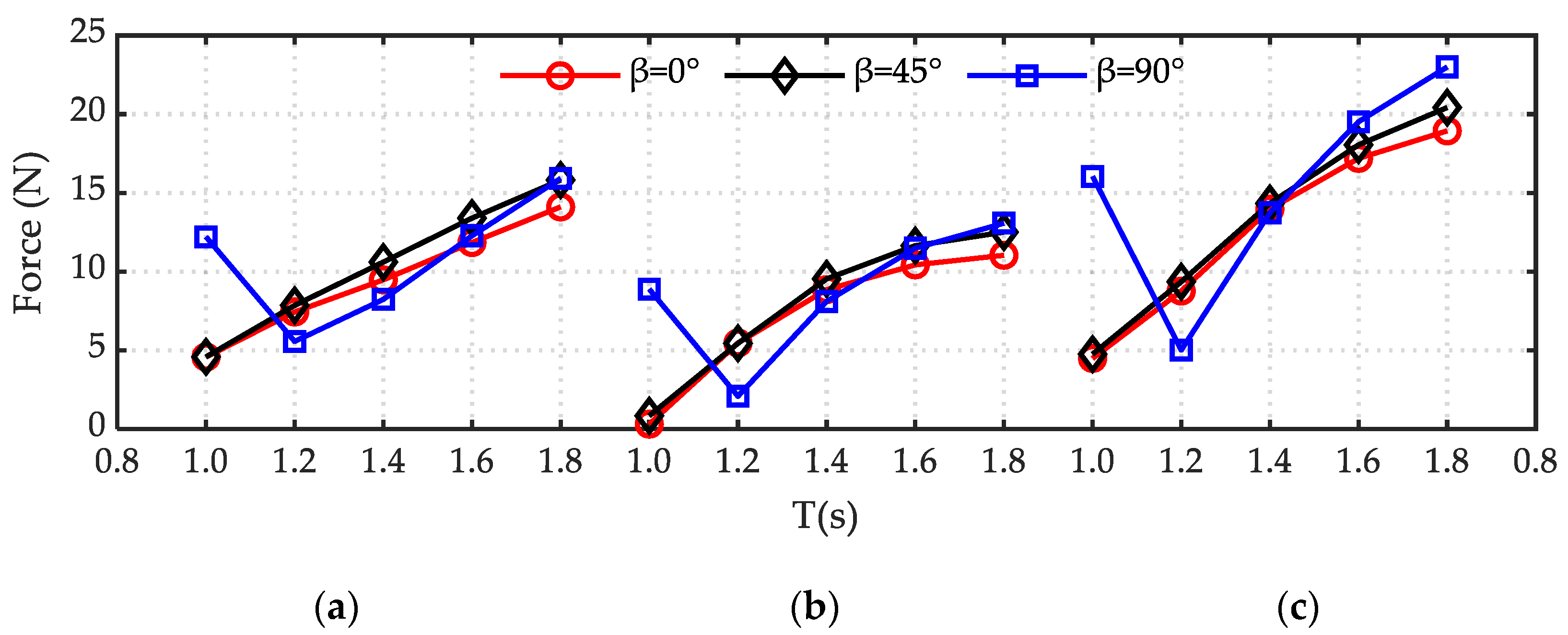
3.3. Components of Horizontal Force in Waves
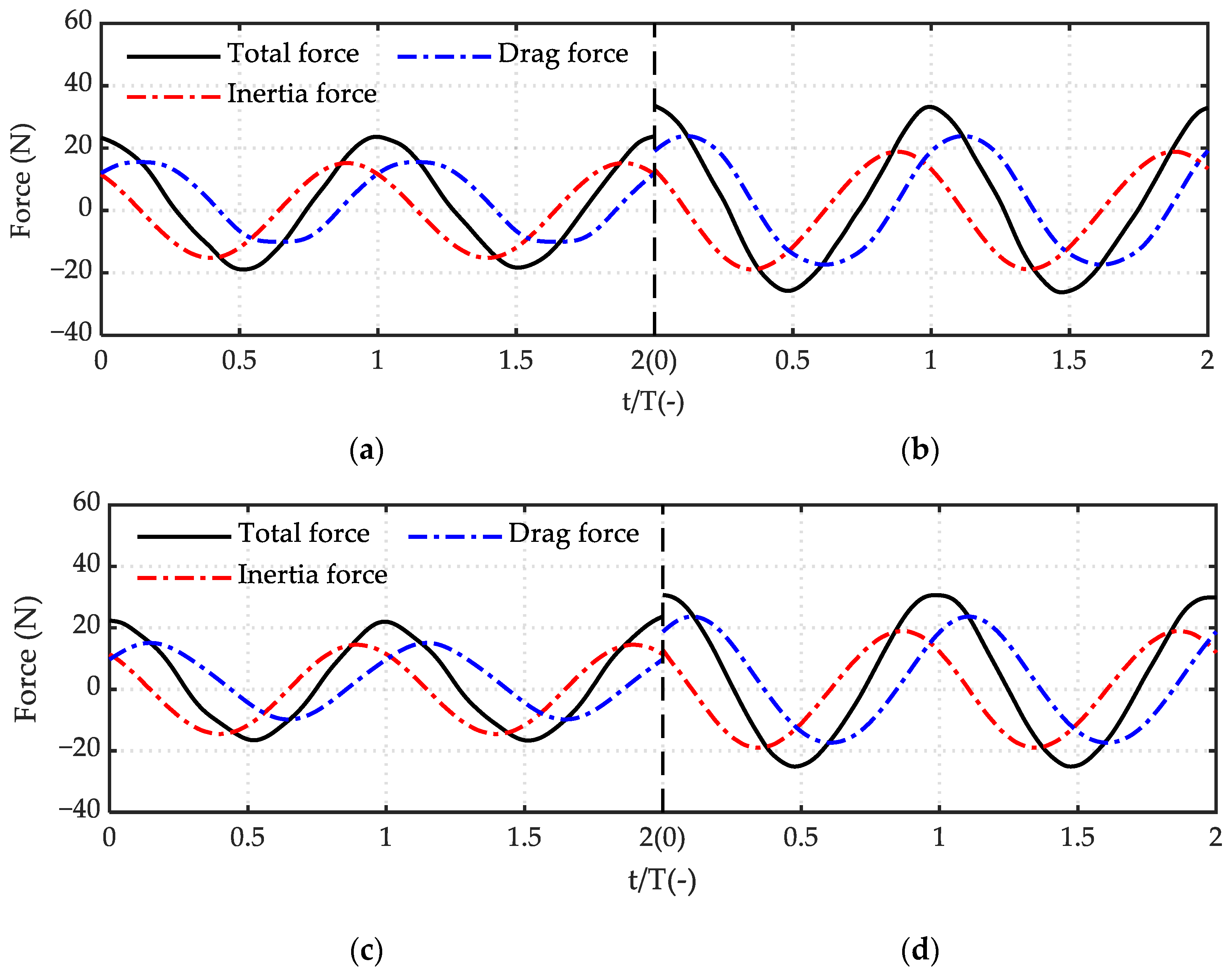
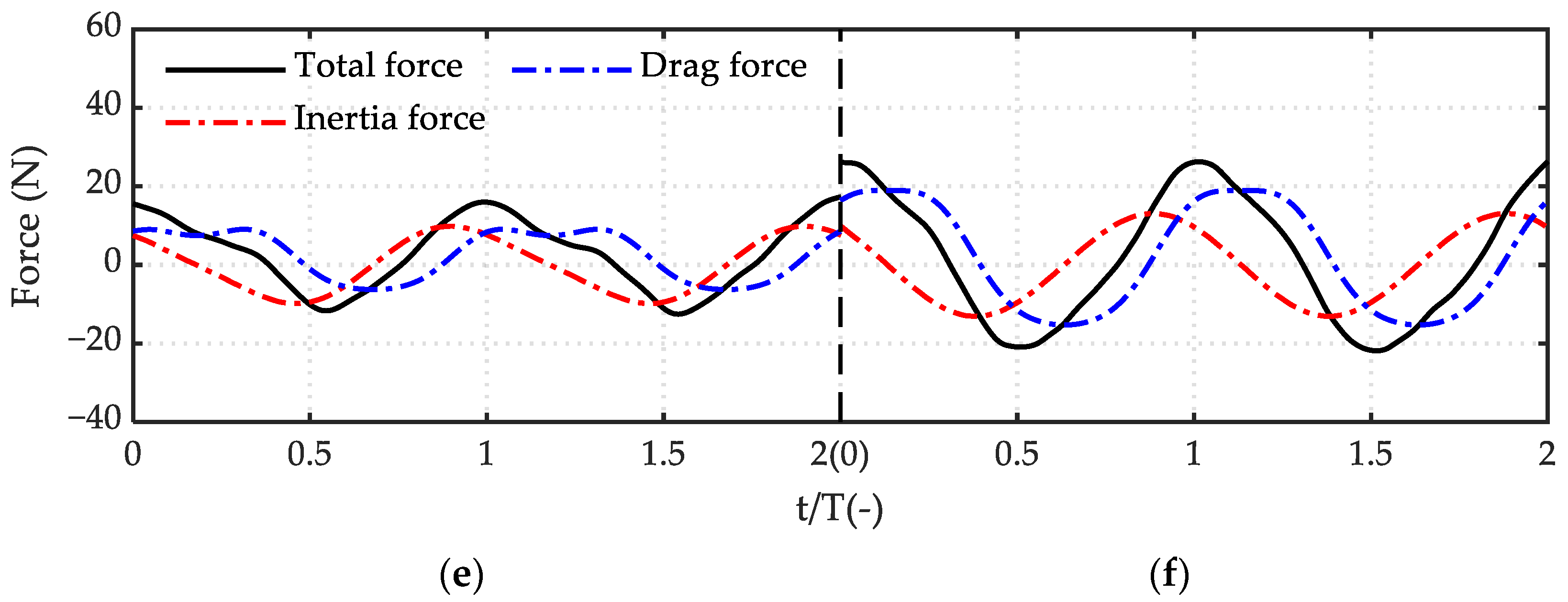
3.3.1. Components of Horizontal Force of the Jacket Structure
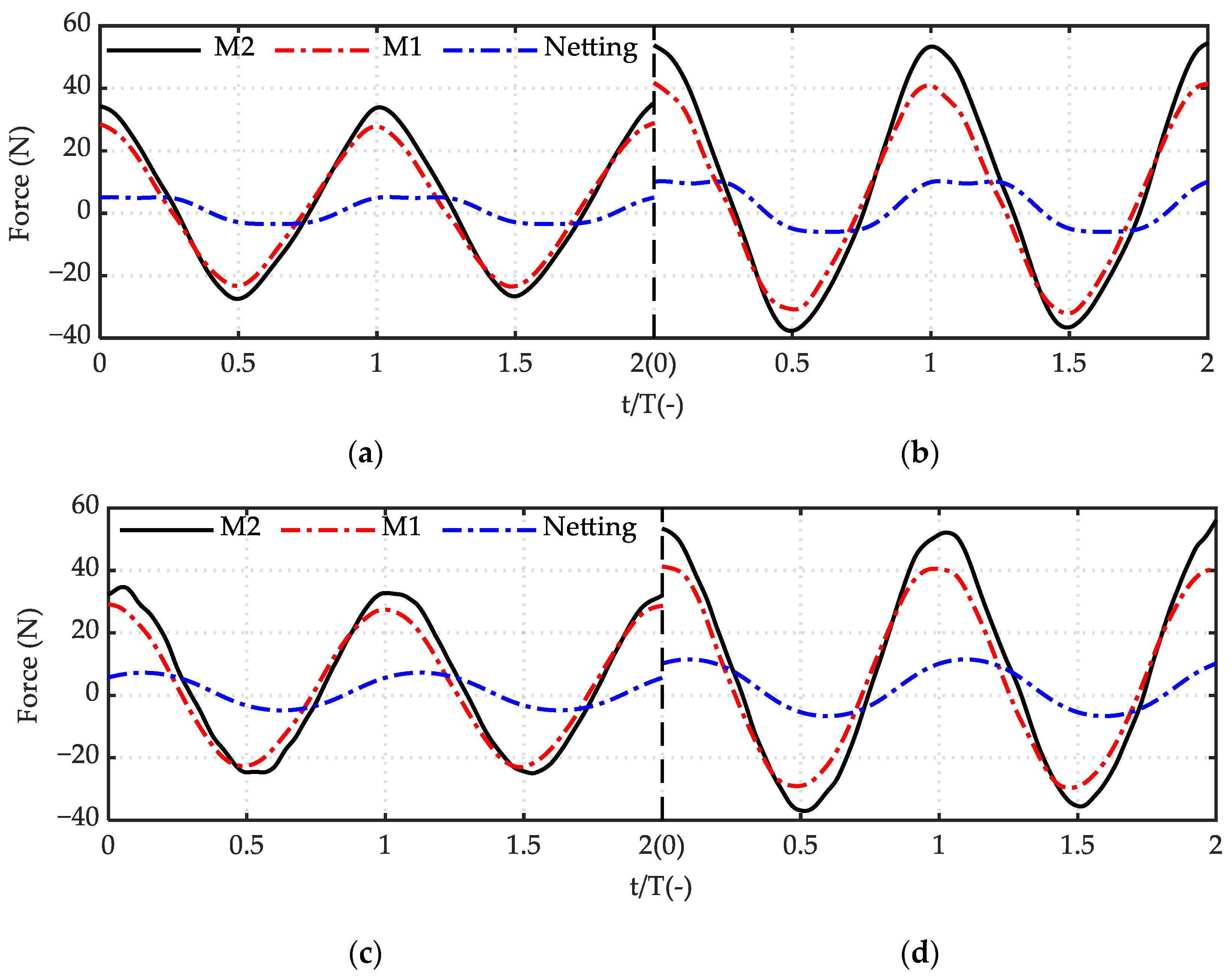
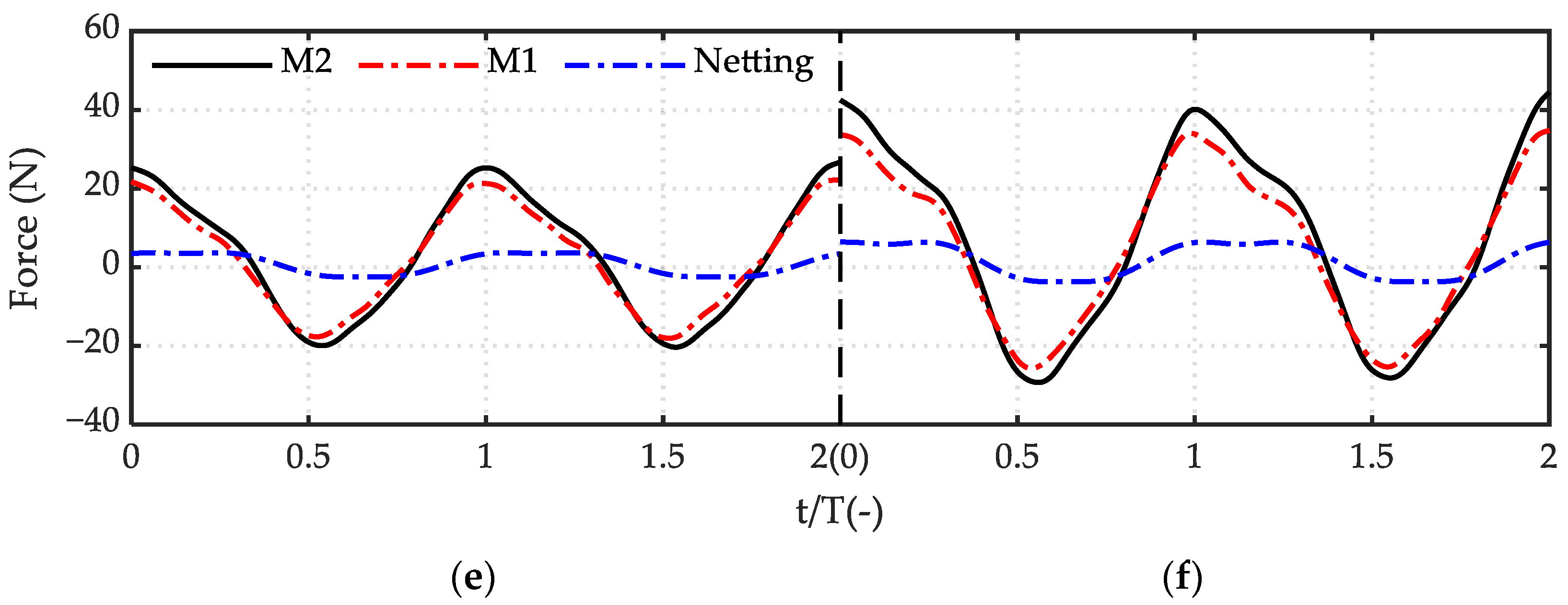
3.3.2. Components of Horizontal Force of the Fish Cage Structure
4. Discussion
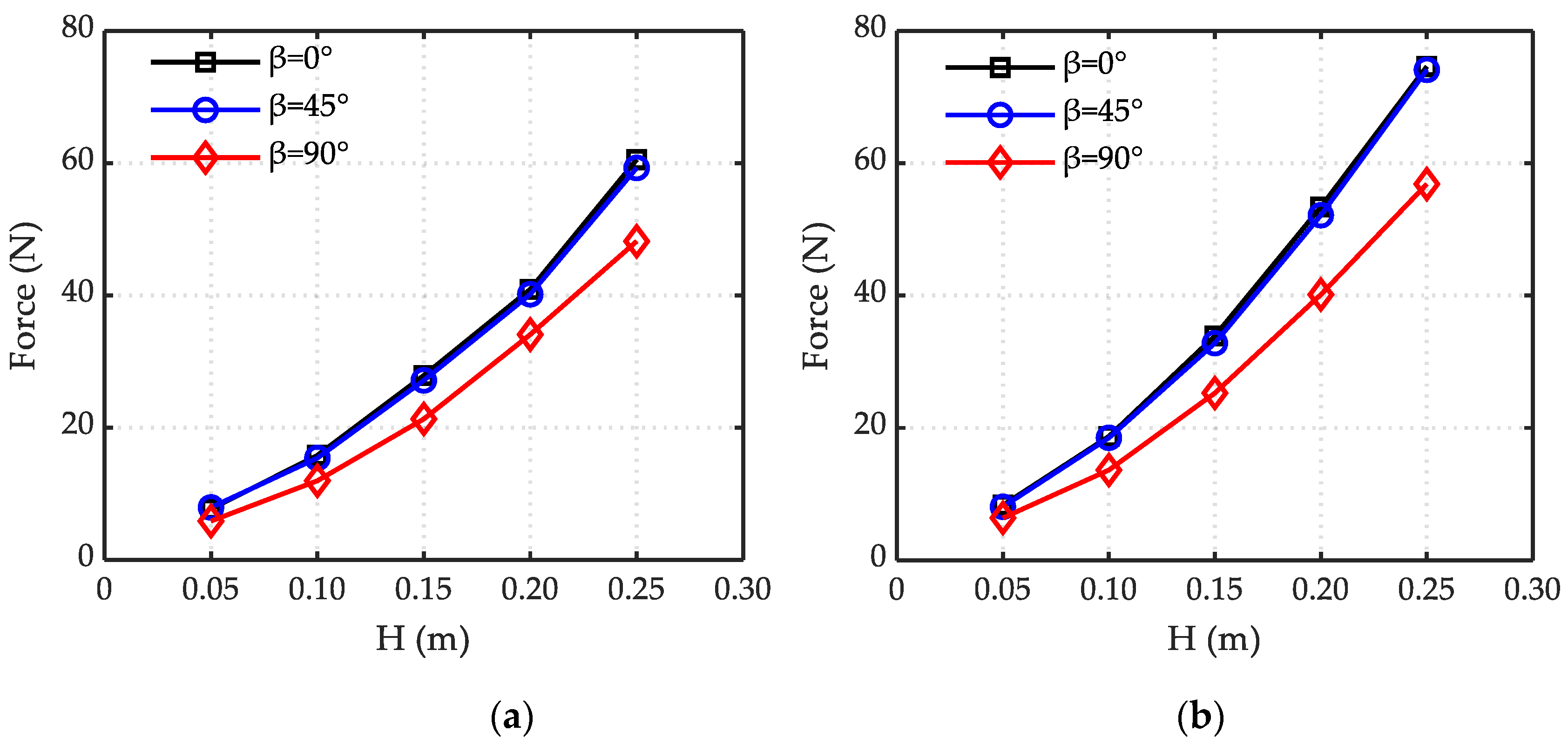
4.1. The Effect of Incident Angles on Wave Force
4.2. The Effect of Incident Angles on Hydrodynamic Coefficients
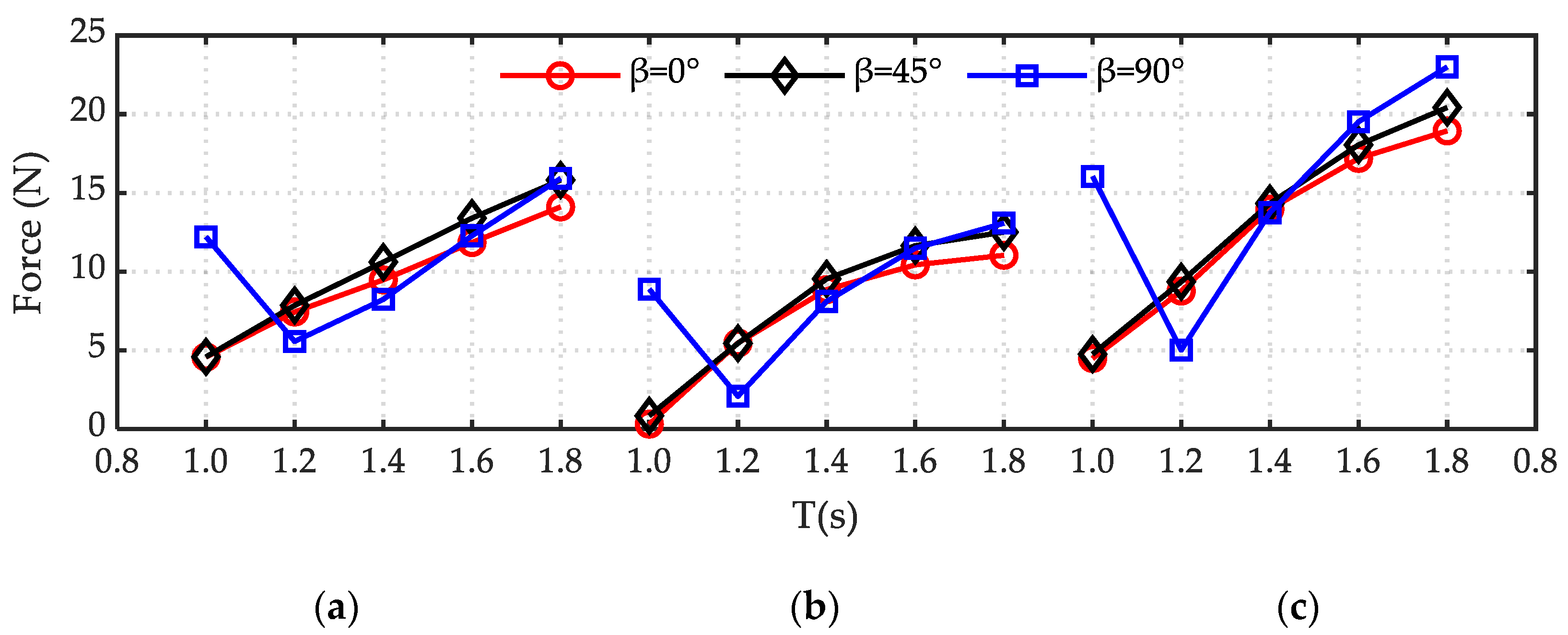
4.3. The Effect of Wave Parameters on Wave Force Components
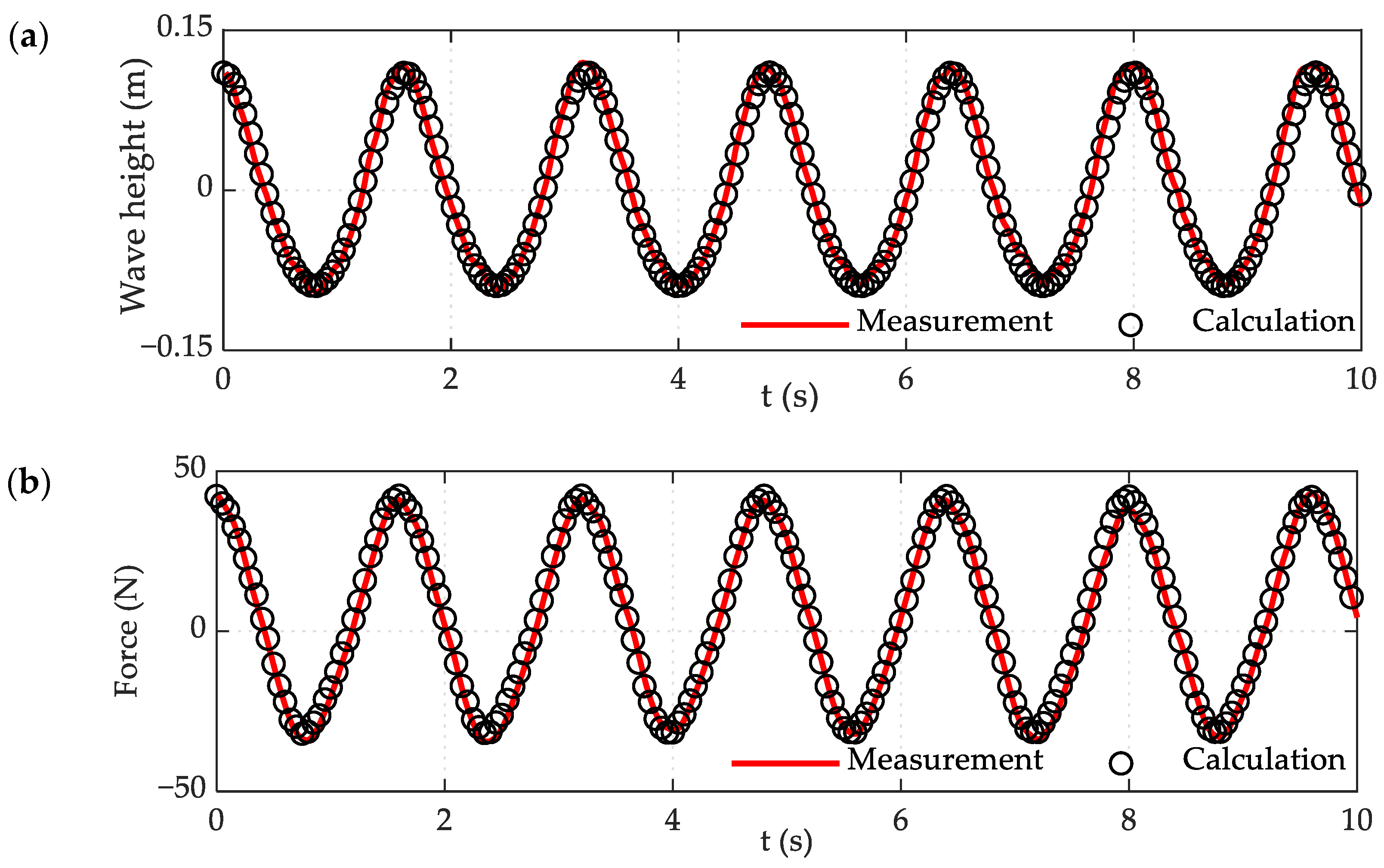
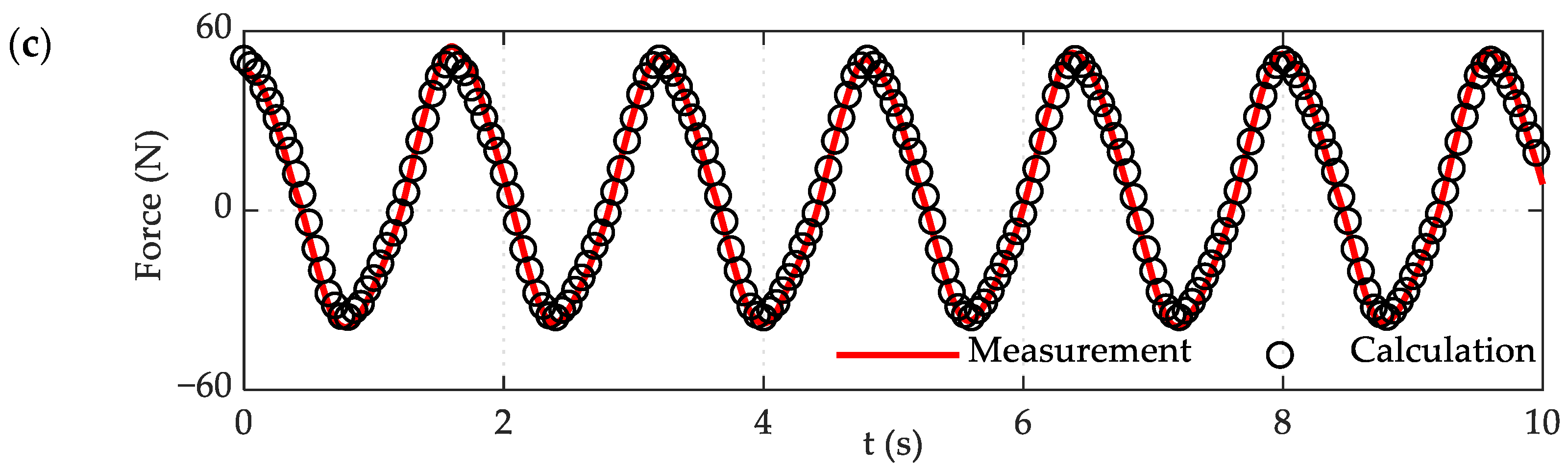
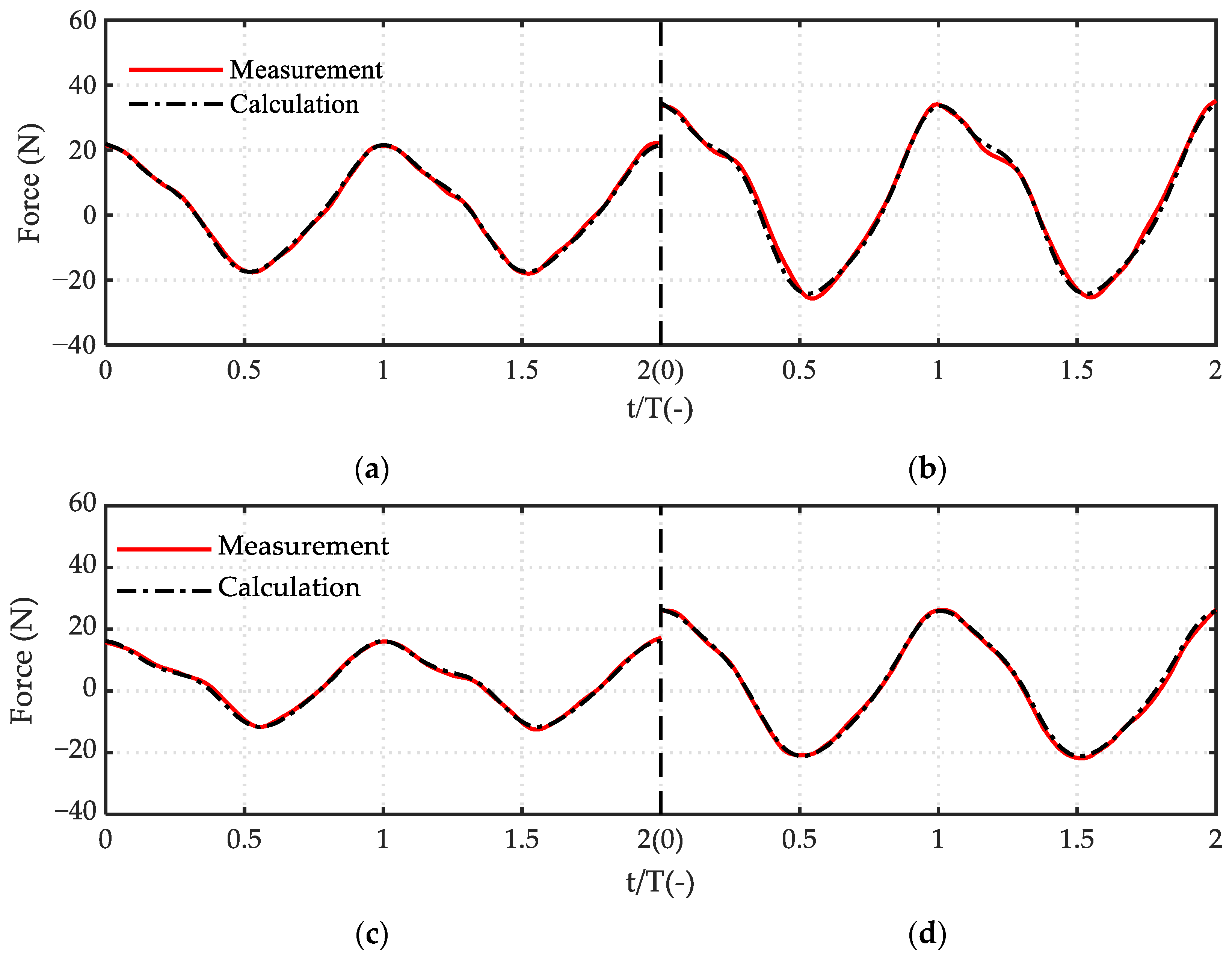
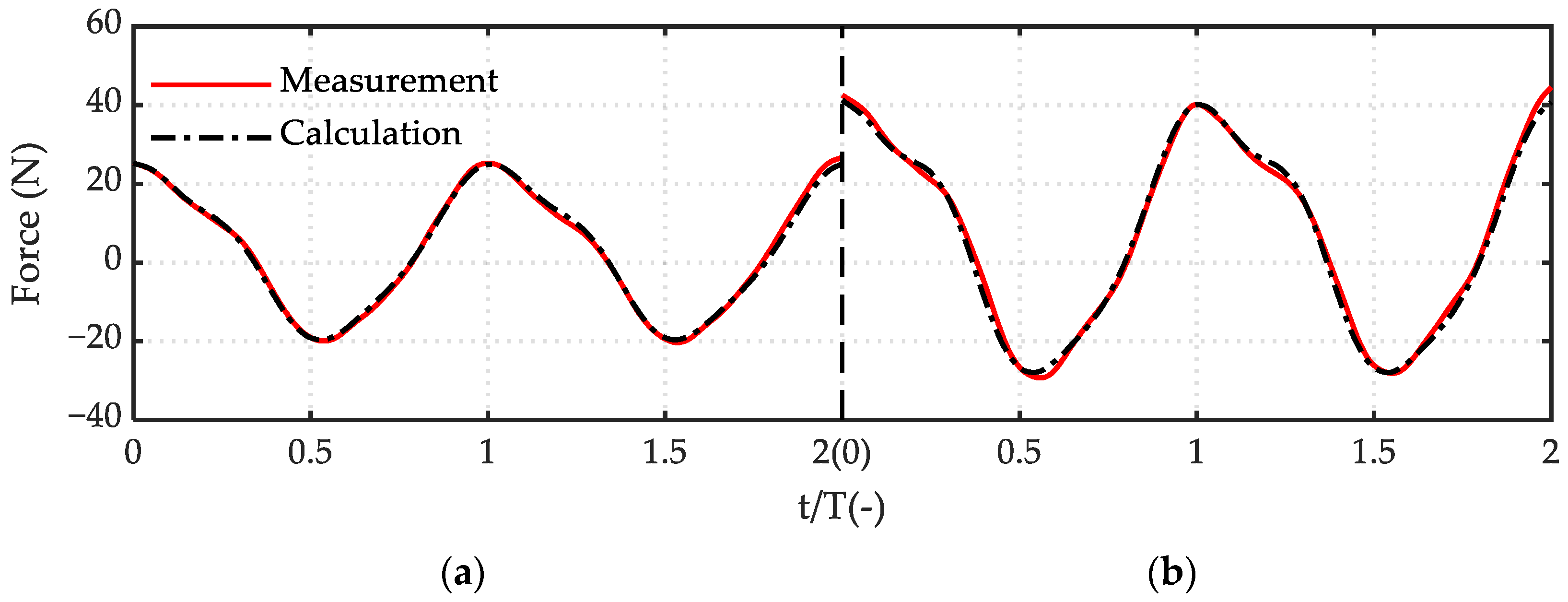
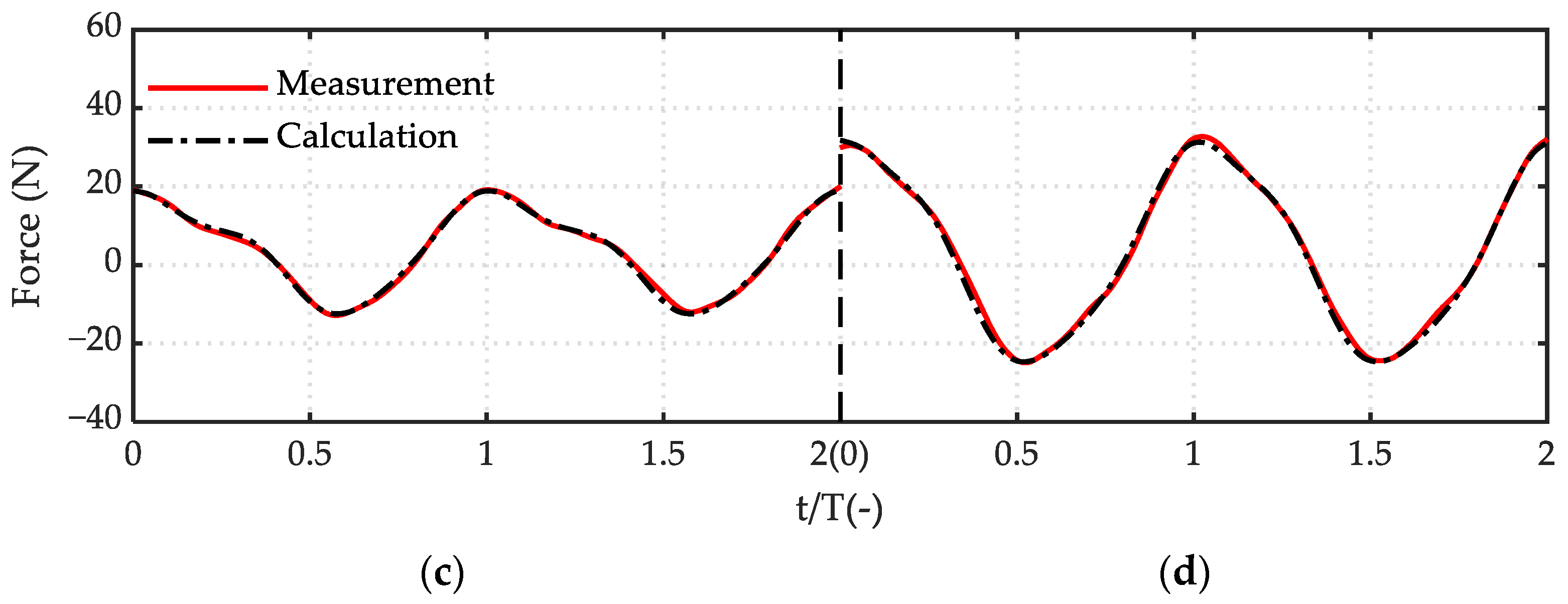
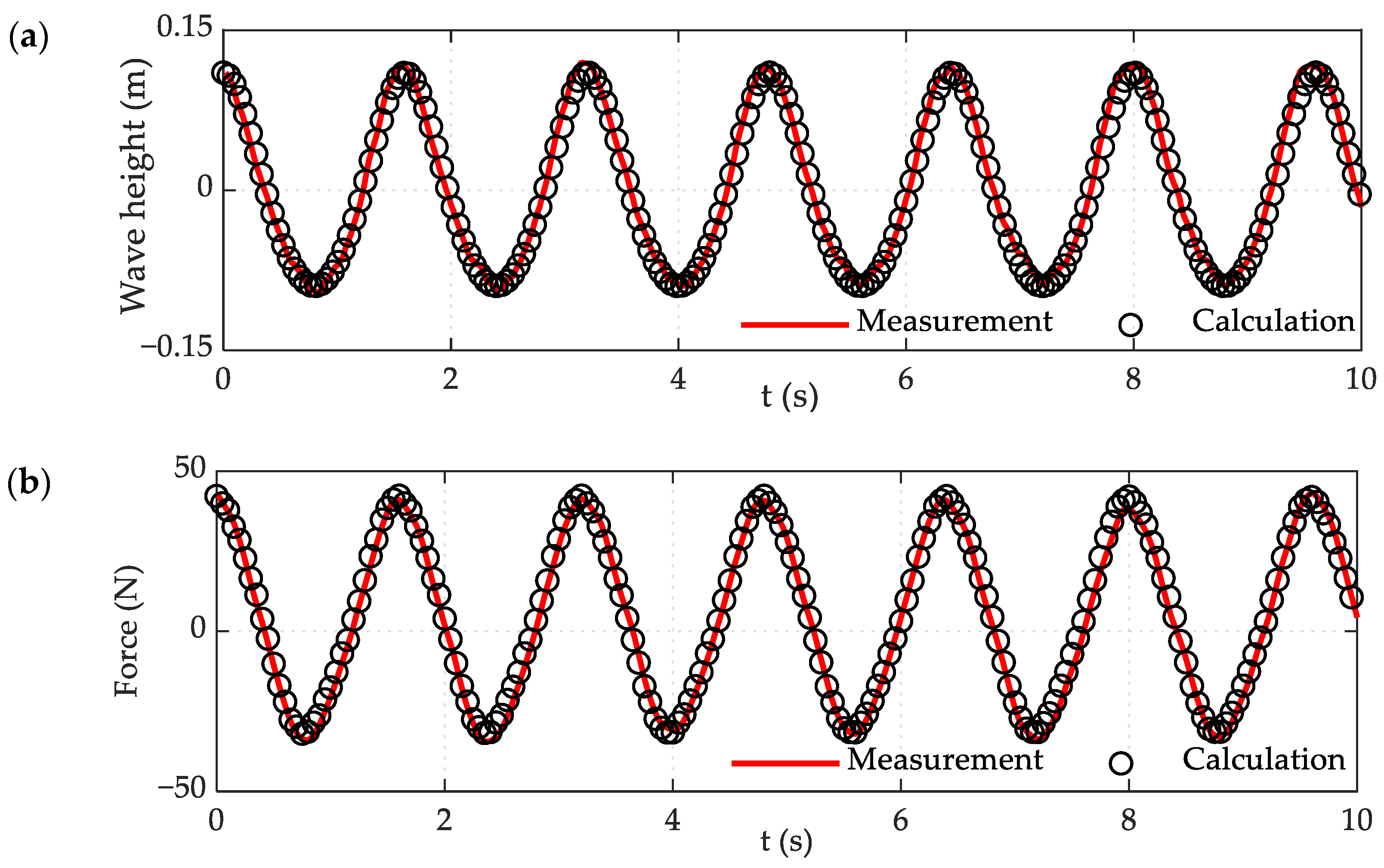
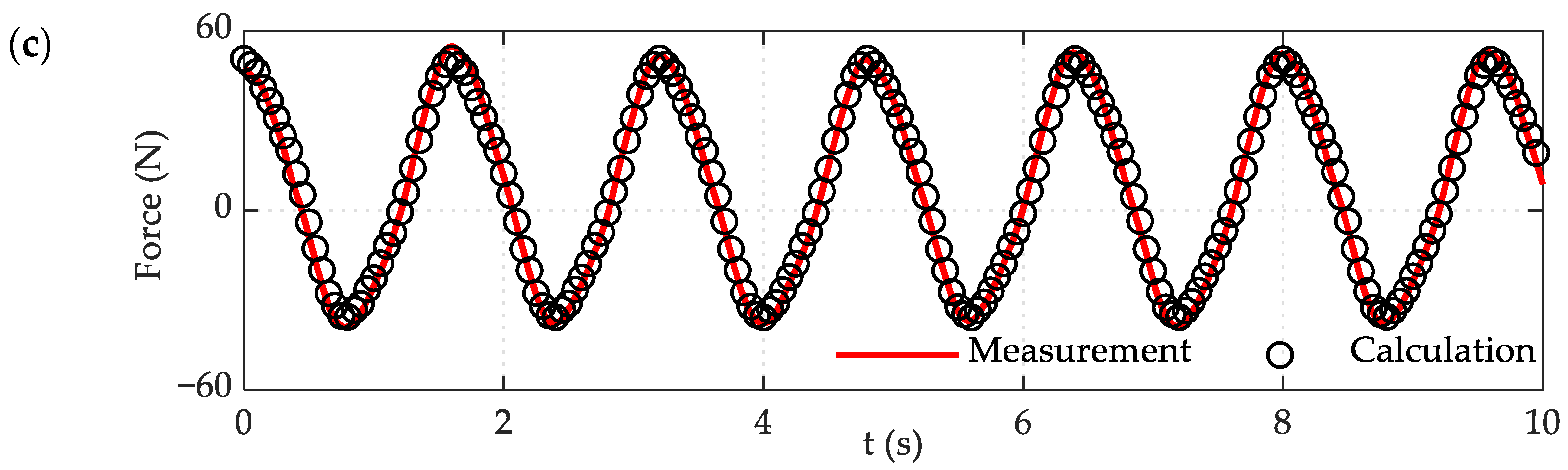
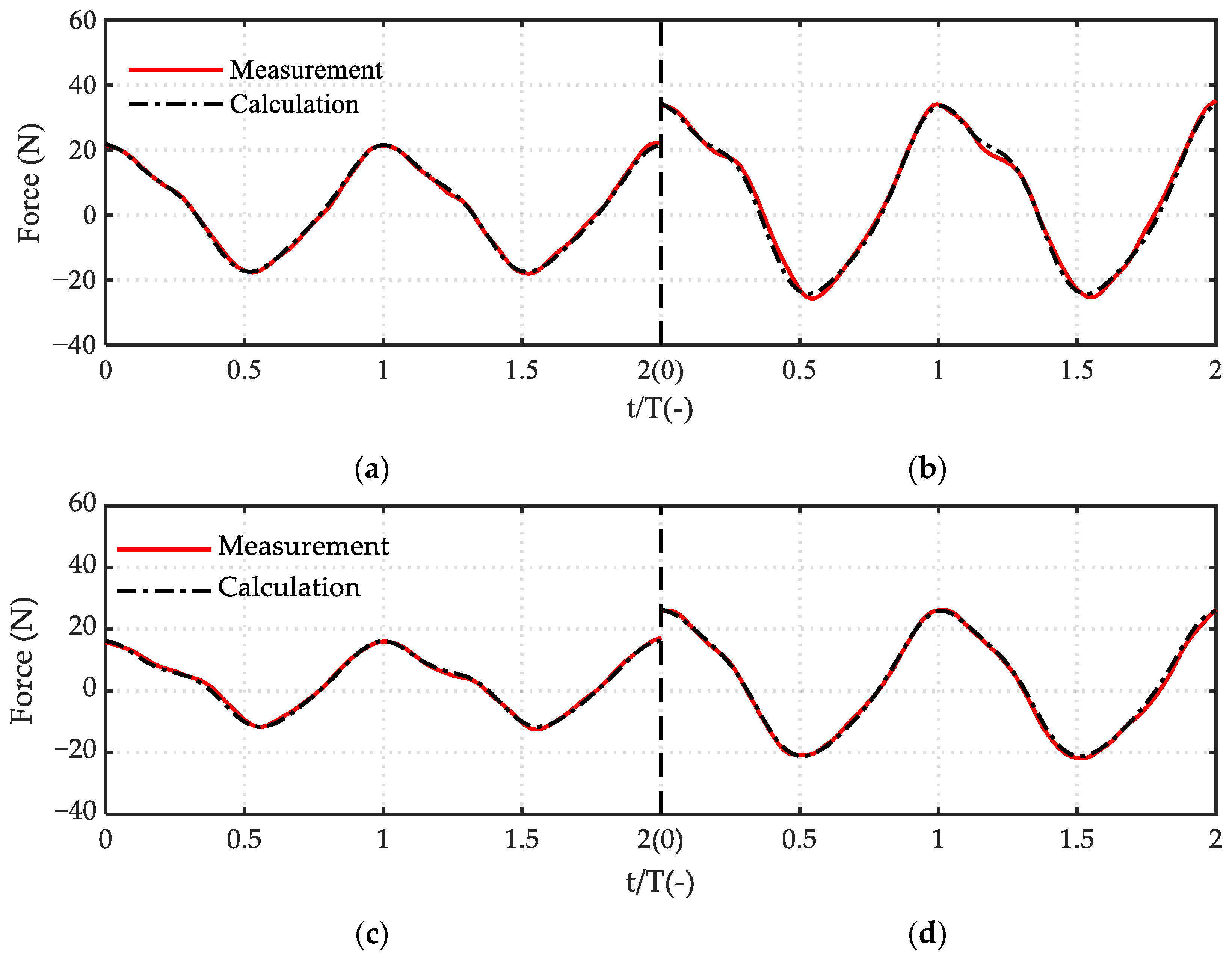
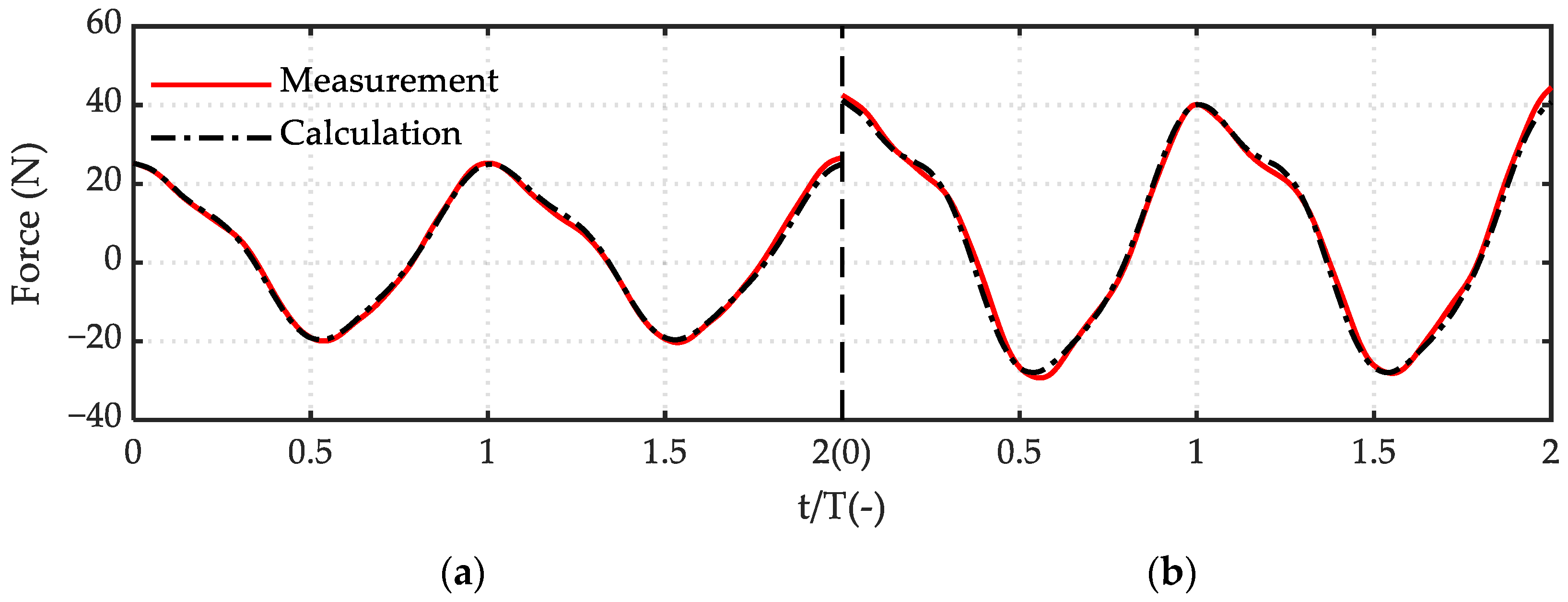
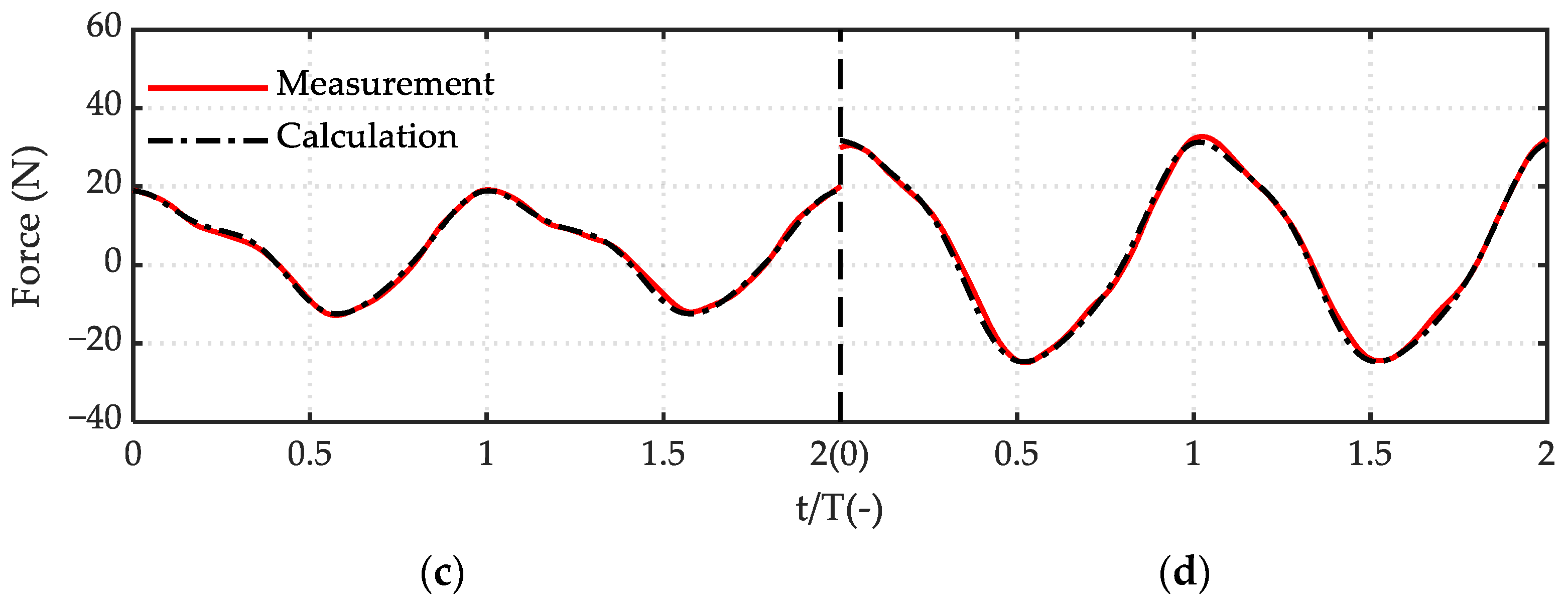
4.4. Results Comparison between Calculation and Measurement
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Klebert, P.; Lader, P.; Gansel, L.; Oppedal, F. Hydrodynamic interactions on net panel and aquaculture fish cages: A review. Ocean Eng. 2013, 58, 260–274. [Google Scholar] [CrossRef]
- Sarpkaya, T. Forces on cylinders and spheres in a sinusoidally oscillating Fluid. J. Appl. Mech. 1975, 42, 32–37. [Google Scholar] [CrossRef]
- Sundar, V.; Vengatesan, V.; Anandkumar, G.; Schlenkhoff, A. Hydrodynamic coefficients for inclined cylinders. Ocean Eng. 1998, 25, 277–294. [Google Scholar] [CrossRef]
- Bushnell, M.J. Forces on cylinder arrays in oscillating flow. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2 May 1977. [Google Scholar]
- Chakrabatri, S.K. Hydrodynamic coefficients for a vertical tube in array. Appl. Ocean Res. 1981, 3, 121–128. [Google Scholar]
- Chakrabatri, S.K. In-line and transverse forces on a tube array in tandem with waves. Appl. Ocean Res. 1982, 4, 25–32. [Google Scholar] [CrossRef]
- Kurian, V.J.; Al-Yacouby, A.M.; Sebastian, A.A.; Liew, M.S.; Idichandy, V.G. Hydrodynamic coefficients for array of tubular cylinders. In Proceedings of the Twenty-fourth International Ocean and Polar Engineering Conference, Busan, Korea, 15–20 June 2014; pp. 641–648. [Google Scholar]
- Santo, H.; Taylor, P.H.; Day, A.H.; Nixon, E.; Choo, Y.S. Current blockage and extreme forces on a jacket model in focussed wave groups with current. J. Fluids Struct. 2018, 78, 24–35. [Google Scholar] [CrossRef]
- Palm, J.; Eskilsson, C.; Bergdahl, L.; Bensow, R. Assessment of scale effects, viscous forces and induced drag on a point-absorbing wave energy converter by CFD simulations. J. Mar. Sci. Eng. 2018, 6, 124. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Wang, F.C.; Hou, X.N.; Ye, J.Q. Strength of submarine hoses in Chinese-lantern configuration from hydrodynamic loads on CALM buoy. Ocean Eng. 2018, 171, 429–442. [Google Scholar] [CrossRef]
- Gadelho, F.M.; Rodrigues, J.M.; Lavrov, A.; Guedes Soares, C. Determining hydrodynamic coefficients of a cylinder with Navier-Stokes equations. In Maritime Technology and Engineering; Guedes, S., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2014; ISBN 978-1-138-02727-5. [Google Scholar]
- Lader, P.F.; Enerhaug, B. Experimental investigation of forces and geometry of a net cage in uniform. IEEE J. Ocean. Eng. 2005, 30, 79–84. [Google Scholar] [CrossRef]
- Decew, J.; Tsukrov, I.; Risso, A.; Swift, M.R.; Celikkol, B. Modeling of dynamic behavior of a single-point moored submersible fish cage under currents. Aquac. Eng. 2010, 43, 38–45. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Bi, C.W.; Dong, G.H.; Gui, F.K.; Cui, Y.; Guan, C.T.; Xu, T.J. Numerical simulation of the flow around fishing plane nets using the porous media model. Ocean Eng. 2013, 62, 25–37. [Google Scholar] [CrossRef]
- Bi, C.W.; Zhao, Y.P.; Dong, G.H.; Xu, T.J.; Gui, F.K. Numerical simulation of the interaction between flow and flexible nets. J. Fluids Struct. 2014, 45, 180–201. [Google Scholar] [CrossRef]
- Bi, C.W.; Zhao, Y.P.; Dong, G.H.; Wu, Z.M.; Zhang, Y.; Xu, T.J. Drag on and flow through the hydroid-fouled nets in currents. Ocean Eng. 2018, 161, 195–204. [Google Scholar] [CrossRef]
- Cui, Y.; Guan, C.T.; Wan, R.; Huang, B.; Li, J. Dynamic analysis of hydrodynamic behavior of a flatfish cage system under wave conditions. China Ocean Eng. 2014, 28, 215–226. [Google Scholar] [CrossRef]
- Dong, G.H.; Tang, M.F.; Xu, T.J.; Bi, C.W.; Guo, W.J. Experimental analysis of the hydrodynamic force on the net panel in wave. Appl. Ocean Res. 2019, 87, 233–246. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Guan, C.T.; Bi, C.W.; Liu, H.F.; Cui, Y. Experimental investigations on hydrodynamic responses of a semi-submersible offshore fish farm in waves. J. Mar. Sci. Eng. 2019, 7, 238. [Google Scholar] [CrossRef]
- Huang, C.C.; Tang, H.J.; Liu, J.Y. Dynamical analysis of net cage structures for marine aquaculture: Numerical simulation and model testing. Aquac. Eng. 2006, 35, 258–270. [Google Scholar] [CrossRef]
- Xu, T.J.; Dong, G.H.; Zhao, Y.P.; Li, Y.C.; Gui, F.K. Numerical investigation of the hydrodynamic behaviors of multiple net cages in waves. Aquac. Eng. 2012, 48, 6–18. [Google Scholar] [CrossRef]
- Tsukrov, I.; Eroshkin, O.; Fredriksson, D.W.; Swift, M.R.; Celikkol, B. Finite element modeling of net panels using a consistent net element. Ocean Eng. 2003, 30, 251–270. [Google Scholar] [CrossRef]
- Morison, J.R.; Johnson, J.W.; Schaaf, S.A. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Li, Y.C.; Dong, G.H.; Gui, F.K.; Wu, H. An experimental and numerical study of hydrodynamic characteristics of submerged flexible plane nets in waves. Aquac. Eng. 2008, 38, 16–25. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Member | Model Number | Section for Prototype | Section for Model |
|---|---|---|---|
| (mm) | (mm) | ||
| Jacket (Outside diameter * Thickness) | P2000 × 50 | 2000 * 50 | 32 * 3 |
| P1500 × 40 | 1500 * 40 | 25 * 2 | |
| P1200 × 40 | 1200 * 40 | 20 * 2 |
| Test Number | Wave Height H/m | Wave Period T/s | Wave Incident Angle β (°) |
|---|---|---|---|
| A1 | 0.05 | 1.6 | 0(A), 45(B), 90(C) |
| A2 | 0.1 | 1.6 | |
| A3 | 0.15 | 1.0, 1.2, 1.4, 1.6, 1.8 | |
| A4 | 0.2 | 1.6 | |
| A5 | 0.25 | 1.6 |
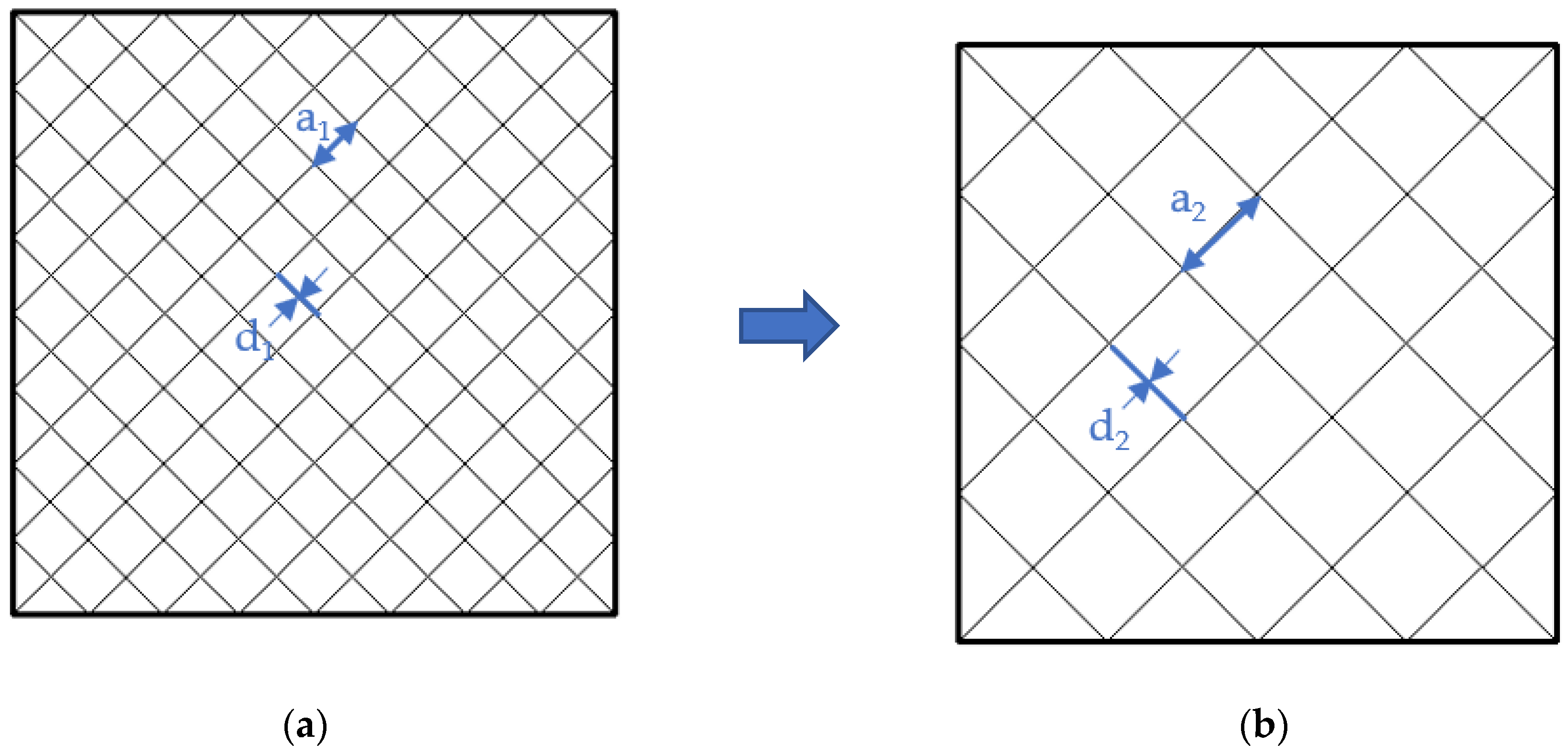
| Parameter Type | Experimental Values | Numerical Values |
|---|---|---|
| Mesh size (mm) | 12 | 24 |
| Twine diameter (mm) | 0.82 | 1.64 |
| Horizontal shrinkage coefficient | 0.6 | 0.6 |
| Vertical shrinkage coefficient | 0.8 | 0.8 |
| Solidity ratio | 0.137 | 0.137 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.-P.; Chen, Q.-P.; Bi, C.-W.; Cui, Y. Experimental Investigation on Hydrodynamic Coefficients of a Column-Stabilized Fish Cage in Waves. J. Mar. Sci. Eng. 2019, 7, 418. https://doi.org/10.3390/jmse7110418
Zhao Y-P, Chen Q-P, Bi C-W, Cui Y. Experimental Investigation on Hydrodynamic Coefficients of a Column-Stabilized Fish Cage in Waves. Journal of Marine Science and Engineering. 2019; 7(11):418. https://doi.org/10.3390/jmse7110418
Chicago/Turabian StyleZhao, Yun-Peng, Qiu-Pan Chen, Chun-Wei Bi, and Yong Cui. 2019. "Experimental Investigation on Hydrodynamic Coefficients of a Column-Stabilized Fish Cage in Waves" Journal of Marine Science and Engineering 7, no. 11: 418. https://doi.org/10.3390/jmse7110418
APA StyleZhao, Y.-P., Chen, Q.-P., Bi, C.-W., & Cui, Y. (2019). Experimental Investigation on Hydrodynamic Coefficients of a Column-Stabilized Fish Cage in Waves. Journal of Marine Science and Engineering, 7(11), 418. https://doi.org/10.3390/jmse7110418