
Machine Learning-Based Recursive Prediction and Application of Green’s Function of Water-Wave Radiation and Diffraction


Abstract
1. Introduction
2. Theory of Green’s Function
2.1. Green’s Function Solution for Radiation Potential
2.2. Frequency-Domain Green’s Function
3. Recursive Prediction Method and Machine Learning
3.1. Recursive Prediction Method
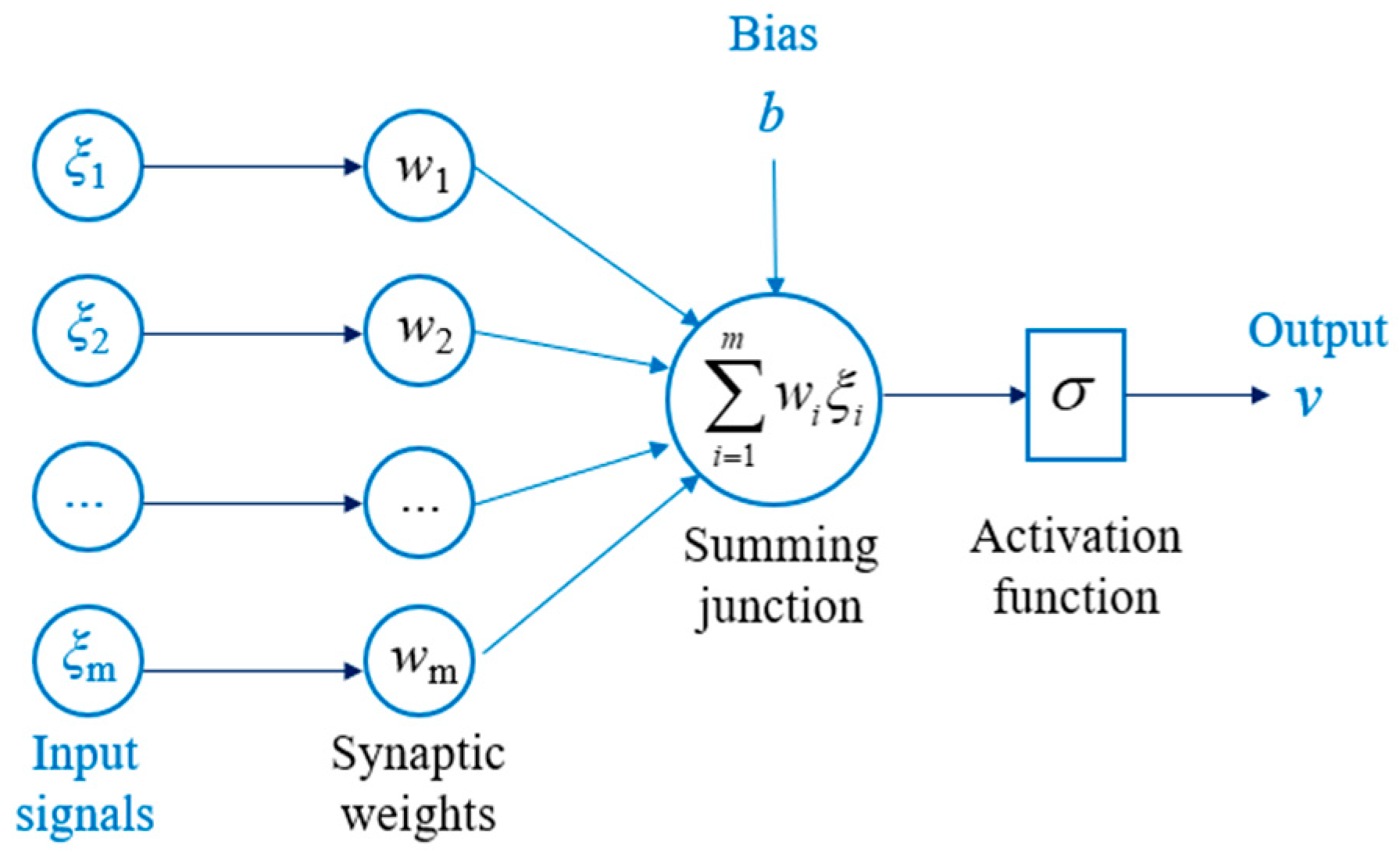
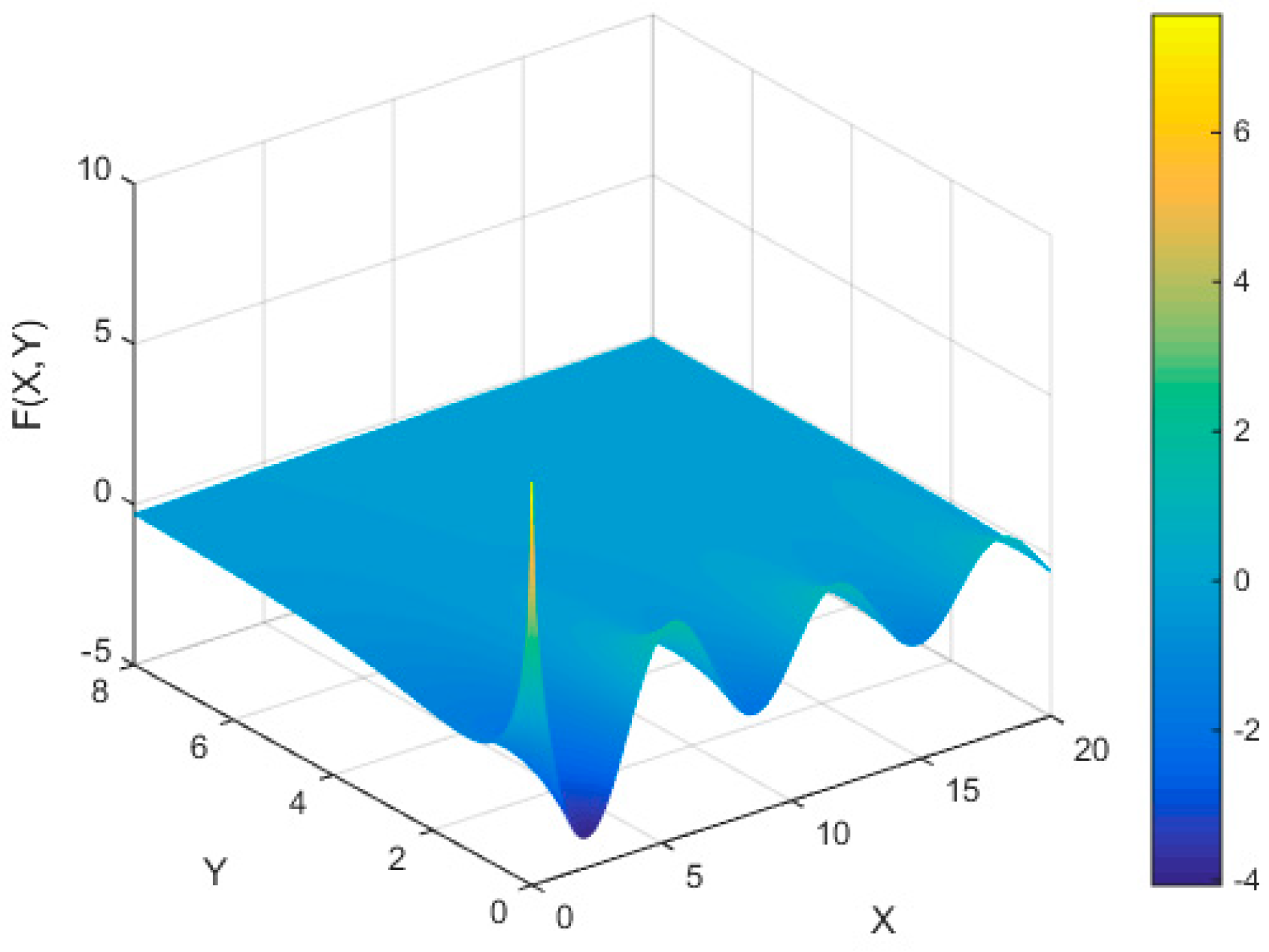
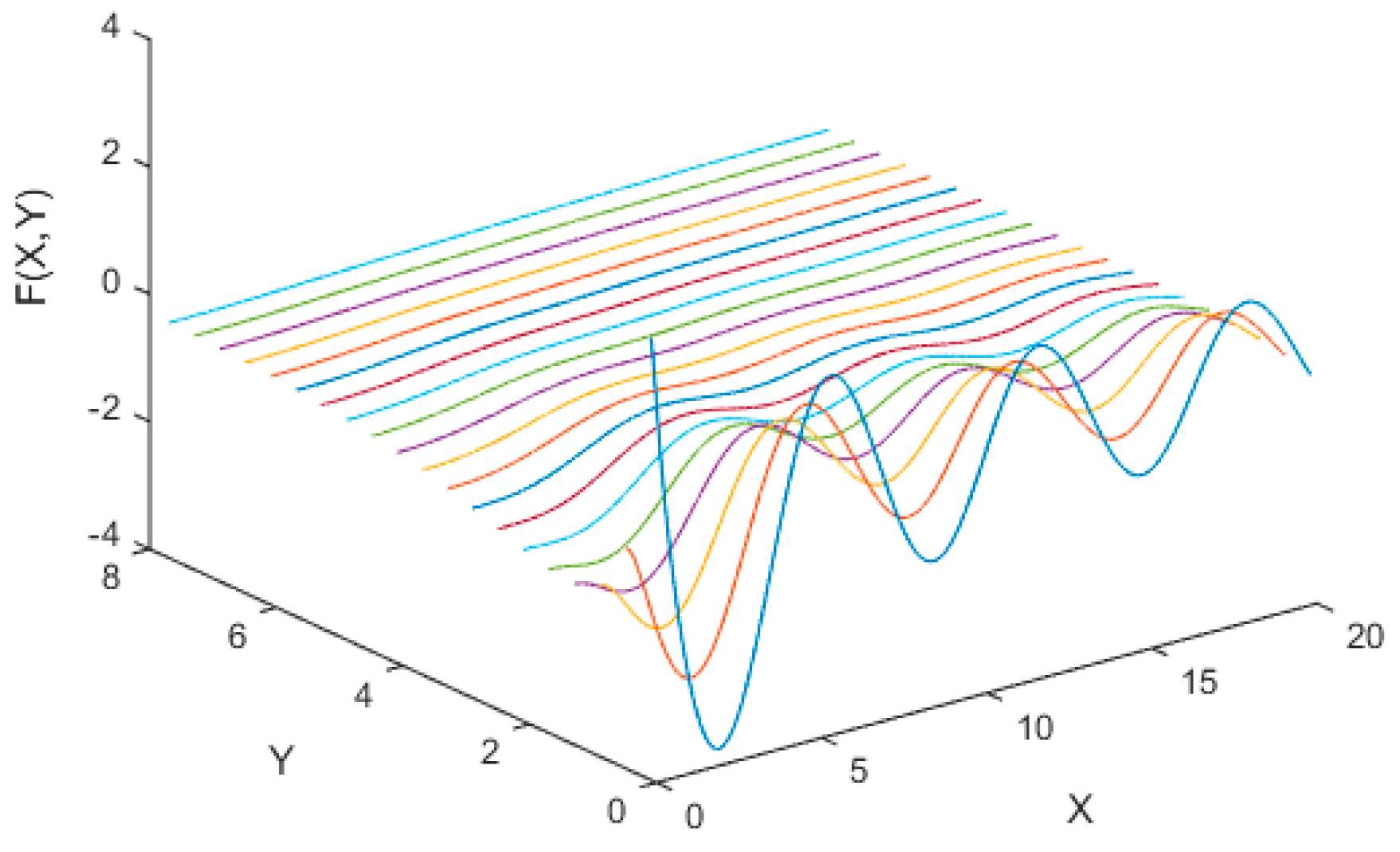
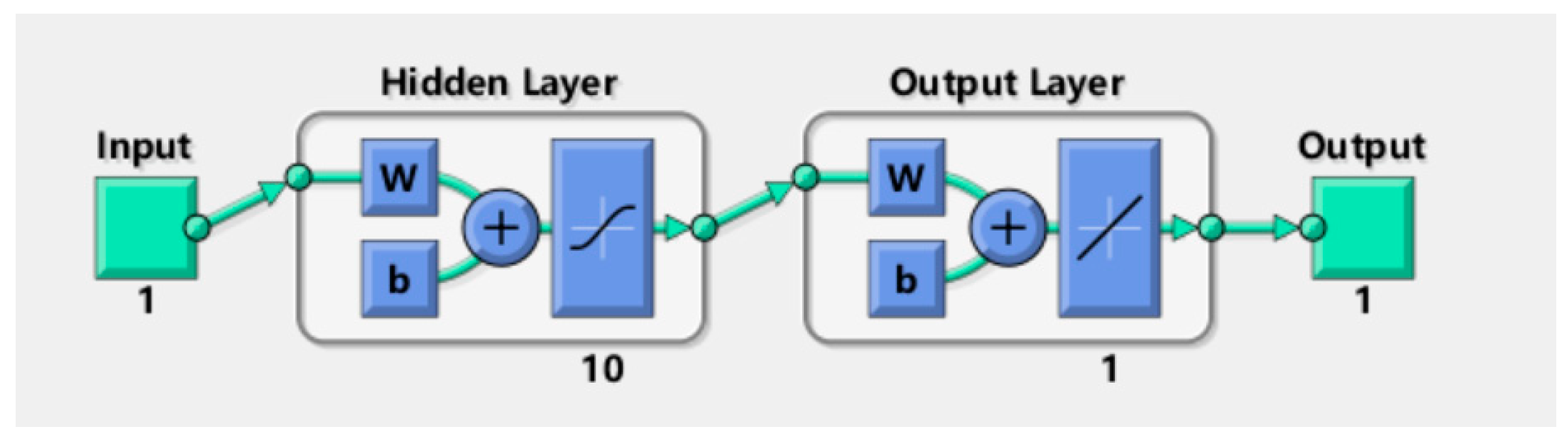
3.2. Neural Network Model of Function F and FX on Datum Line in Machine Learning
- (1)
- The training sample set density
- (2)
- The neural network complexity
- (3)
- The single datum line recursive prediction coverage range
4. Errors and Efficiency to Predict Green’s Function
4.1. Global Training Recursive Prediction
- (1)
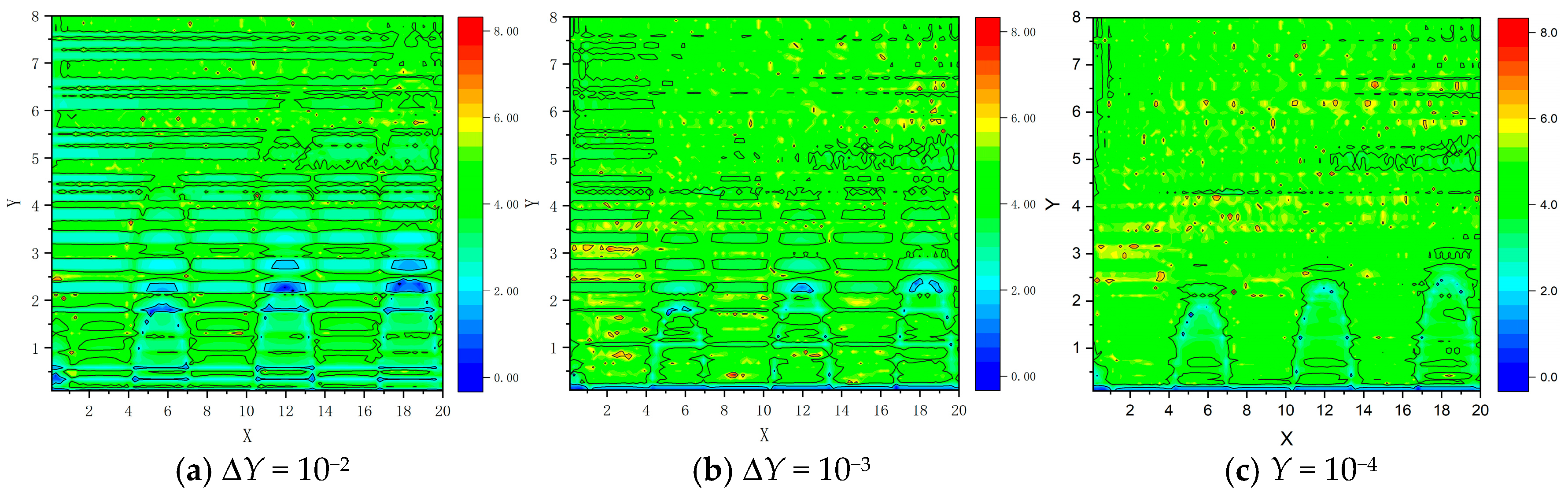
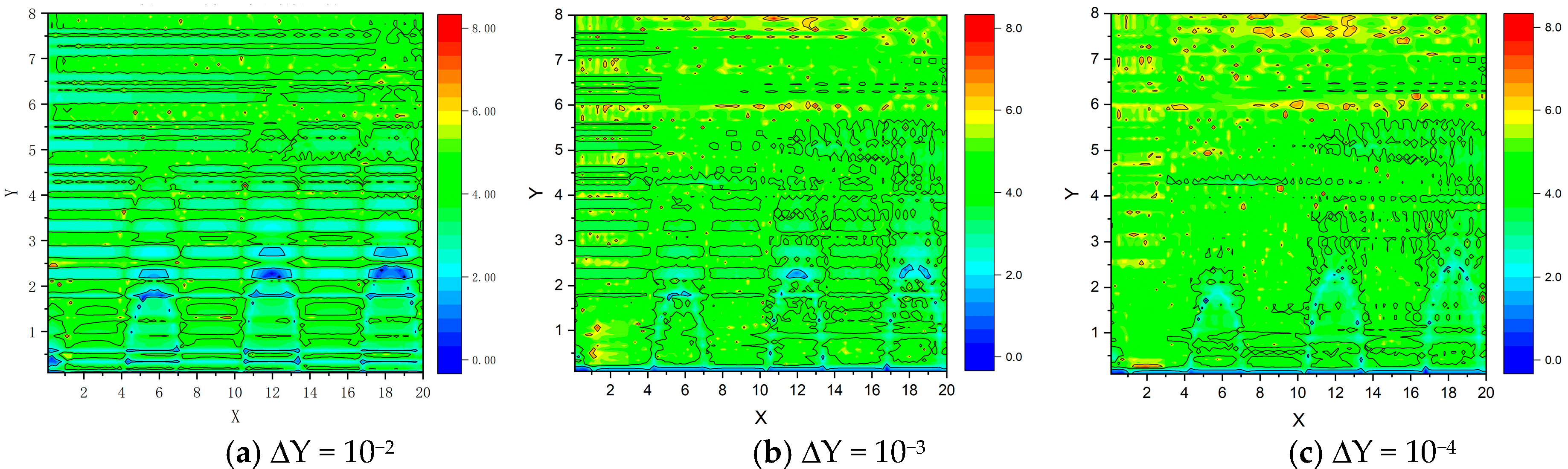
- The influence of recursive step ΔY on errors and efficiency
- (2)
- The influence of datum line interval on error and efficiency
4.2. Partitioned Training Recursive Prediction
4.3. Forecast Efficiency Comparison
5. Verification of Green’s Function Applications
5.1. Numerical Examples
5.2. Case of Ship Motion in Waves Without Speed
5.3. Case of Ship Motion in Waves with Forward Speed
6. Conclusions
- (1)
- With an appropriate recursive step size in the vertical direction, the predicted result of F(X, Y) can achieve an accuracy of 10−3 to 10−6, with most prediction points reaching at least 10−4 accuracy, which generally meets the requirements of ship hydrodynamic calculations.
- (2)
- If an appropriate recursive step size is selected, the pulsating source recursive prediction method for calculating the Green’s function far surpasses numerical methods in computational efficiency within the defined computational domain, and it is comparable to the analytical method.
- (3)
- Theoretically, if the spacing of the baseline arrangement in the computational domain can be reduced, better prediction accuracy and efficiency can be achieved. More refined partition training can further reduce the complexity of the neural networks used, thereby improving prediction efficiency. The proposed method maintains a certain advantage in efficiency while ensuring accuracy.
- (4)
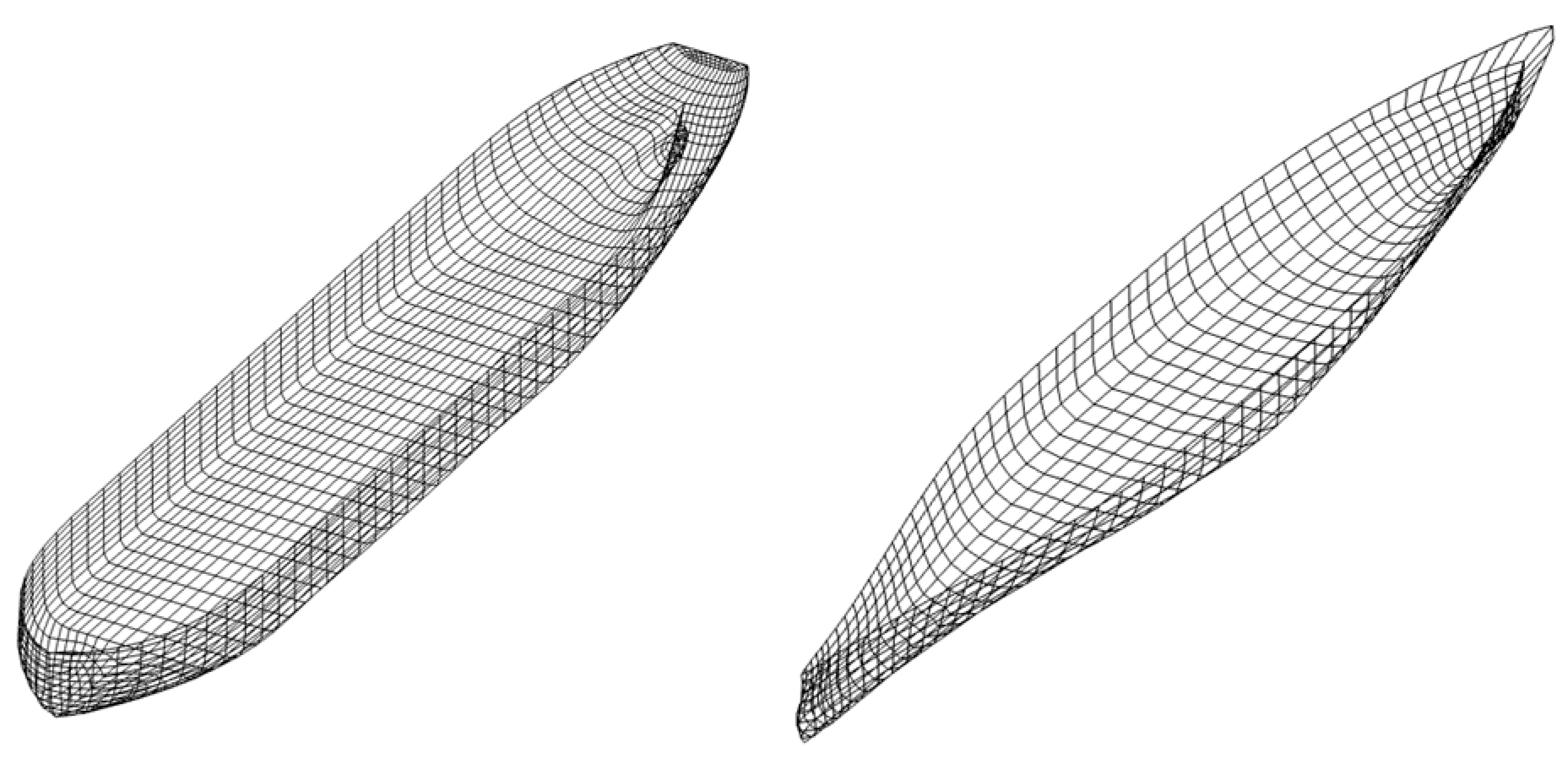
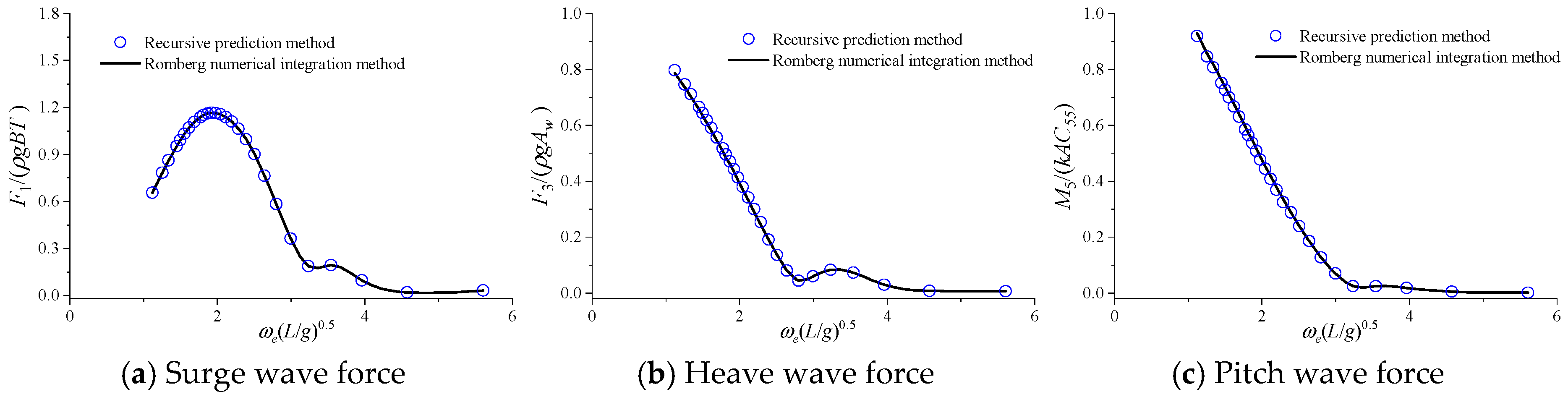
- The free-surface Green’s function and its partial derivatives are calculated using the pulsating source recursive prediction method and applied to the hydrodynamic calculations of the S175 container ship and a bulk carrier. The results are generally accurate, indicating that the method meets the needs of ship hydrodynamic calculations. The proposed method is universal and can also be applied to hydrodynamic calculations for other types of ships.
- (5)
- Since the values of the free-surface Green’s function or its partial derivatives in the far field are extremely small and vary gently, the pulsating source recursive prediction method does not yield satisfactory results. Thus, the method has certain limitations. For hydrodynamic calculations of large floating bodies like floating platforms, the pulsating source recursive prediction method can be used in the near field, while analytical methods are recommended for the far field.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhu, R.C.; Miao, G.P. Theory of Ship Motion in Waves; Shanghai Jiao Tong University Press: Shanghai, China, 2019. [Google Scholar]
- Newman, J.N. Marine Hydrodynamics; MIT Press: Cambridge, MA, USA, 1977. [Google Scholar]
- Noblesse, F. The Green function in the theory of radiation and diffraction of regular water waves by a body. J. Eng. Math. 1982, 16, 137–169. [Google Scholar] [CrossRef]
- Newman, J.N. Double-precision evaluation of the oscillatory source potential. J. Ship Res. 1984, 28, 151–154. [Google Scholar] [CrossRef]
- Newman, J.N. Algorithms for the free-surface Green function. J. Eng. Math. 1985, 19, 57–67. [Google Scholar] [CrossRef]
- Newman, J.N. The approximation of free-surface Green functions. In Wave Asymptotics; Martin, P.A., Wickham, G.R., Eds.; Retirement Meeting for Professor Fritz Ursell, University of Manchester; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Wang, R.C. The numerical approach of three dimensional free-surface green function and its derivates (Frequency domain-infinite depth). J. Hydrodyn. (A) 1992, 3, 277–286. [Google Scholar]
- Zhou, Q.B.; Zhang, G.; Zhu, L.S. The fast calculation of free-surface wave green function and its derivatives. Chin. J. Comput. Phys. 1999, 2, 3–10. [Google Scholar]
- Duan, W.Y.; Yu, D.H.; Shen, Y. Algorithm for infinite depth water wave green function and its high order derivatives. J. Ship Mech. 2016, 20, 10–22. [Google Scholar]
- Yao, X.L.; Sun, S.L.; Zhang, A.M. Efficient Calculation of 3D Frequency-domain Green Functions. Chin. J. Comput. Phys. 2009, 26, 564–568. [Google Scholar]
- Wu, H.; Zhang, C.; Zhu, Y.; Li, W.; Wan, D.; Noblesse, F. A global approximation to the Green function for diffraction radiation of water waves. Sci. Direct Eur. J. Mech. B/Fluids 2017, 65, 54–64. [Google Scholar] [CrossRef]
- Shan, P.H.; Zhu, R.C.; Wang, F.H.; Wu, J. Efficient approximation of free-surface Green function and OpenMP parallelization in frequency-domain wave—Body interactions. J. Mar. Sci. Technol. 2019, 24, 479–489. [Google Scholar] [CrossRef]
- Chang, H.Y.; Zhu, R.C.; Huang, S. Preliminary study on prediction of pulsating source Green function based on machine learning. Ocean. Eng. 2020, 38, 131–141. [Google Scholar]
- Hess, D.E.; Roddy, R.F.; Faller, W.E. Uncertainty Analysis Applied to Feedforward Neural Networks. Ship Technol. Res. 2007, 54, 114–124. [Google Scholar] [CrossRef]
- Zhou, Z.H. Machine Learning; Tsinghua University Press: Beijing, China, 2016. [Google Scholar]
- Fischer, A.; Izmailov, A.F.; Solodov, M.V. The Levenberg–Marquardt method: An overview of modern convergence theories and more. Comput. Optim. Appl. 2024, 89, 33–67. [Google Scholar] [CrossRef]
- Amini, K.; Rostami, F.; Caristi, G. An efficient Levenberg-Marquardt method with a new LM parameter for systems of nonlinear equations. Optimization 2018, 67, 637–650. [Google Scholar] [CrossRef]
- Liang, H.; Wu, H.; Noblesse, F. Validation of a global approximation for wave diffraction-radiation in deep water. Appl. Ocean. Res. 2018, 74, 80–86. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hidden Layer Structure | Optimization Algorithms | Activation Function | Vertical Coordinate Y | Number of Nodes | Vertical Coordinate Y | Number of Nodes |
|---|---|---|---|---|---|---|
| Single hidden layer | Levenberg–Marquardt [16,17] | Sigmoid | [0.1, 1.0] | 72 | [4.1, 5.0] | 24 |
| [1.1, 2.0] | 64 | [5.1, 6.0] | 16 | |||
| [2.1, 3.0] | 48 | [6.1, 8.0] | 12 | |||
| [3.1, 4.0] | 32 |
| Errors | Err < 10−2 | 10−2 < Err < 10−3 | 10−3 < Err < 10−4 | 10−4 < Err < 10−5 | Err > 10−5 | Average Time Consumption/μs | |
|---|---|---|---|---|---|---|---|
| Step Size ΔY | |||||||
| 10−2 | 3.49% | 15.00% | 34.86% | 37.41% | 9.24% | 0.239 | |
| 5 × 10−3 | 2.45% | 15.09% | 41.74% | 32.31% | 8.40% | 0.259 | |
| 10−3 | 1.40% | 3.04% | 26.31% | 52.41% | 16.84% | 0.381 | |
| 5 × 10−4 | 1.34% | 3.14% | 21.59% | 55.21% | 18.74% | 0.547 | |
| 10−4 | 1.13% | 1.02% | 14.69% | 62.65% | 20.51% | 1.841 | |
| Forecast Error | Err < 10−2 | 10−2 < Err < 10−3 | 10−3 < Err < 10−4 | 10−4 < Err < 10−5 | Err > 10−5 | Average Time Consumption/μs | |
|---|---|---|---|---|---|---|---|
| Baseline Interval | |||||||
| 0.4 | 1.51% | 4.07% | 29.40% | 49.94% | 15.09% | 0.889 | |
| 0.2 | 1.57% | 3.77% | 27.33% | 51.12% | 16.21% | 0.547 | |
| 0.1 | 1.40% | 3.04% | 26.31% | 52.41% | 16.84% | 0.381 | |
| Horizontal Coordinate X | Vertical Coordinate Y | Number of Network Nodes | Horizontal Coordinate X | Vertical Coordinate Y | Number of Network Nodes |
|---|---|---|---|---|---|
| [0.0, 3.0] | [0.1, 1.0] | 48 | [3.0, 20] | [3.1, 5.0] | 16 |
| [1.1, 1.8] | 8 | [5.1, 6.0] | 12 | ||
| [3.0, 20] | [0.1, 1.0] | 32 | [6.1, 8.0] | 8 | |
| [1.1, 3.0] | 24 |
| Forecast Error | Err < 10−2 | 10−2 < Err < 10−3 | 10−3 < Err < 10−4 | 10−4 < Err < 10−5 | Err > 10−5 | Average Time Consumption/μs | |
|---|---|---|---|---|---|---|---|
| Recursive Step Size ΔY | |||||||
| 10−2 | 2.97% | 14.35% | 37.56% | 33.18% | 11.94% | 0.166 | |
| 5 × 10−3 | 2.38% | 14.74% | 43.20% | 29.76% | 9.91% | 0.181 | |
| 10−3 | 1.43% | 2.69% | 31.55% | 43.32% | 21.02% | 0.298 | |
| 5 × 10−4 | 1.37% | 2.98% | 26.69% | 48.57% | 20.28% | 0.464 | |
| 10−4 | 1.18% | 1.58% | 20.91% | 50.52% | 25.81% | 1.675 | |
| Methods | Pulsating Source Recursive Prediction | Romberg Integration | Global Approximation (Wu) | Machine Learning (Chang) | |
|---|---|---|---|---|---|
| Test Scale | |||||
| 400,000 | 0.281 | 1.621 | 0.562 | 3.055 | |
| 800,000 | 0.316 | 1.617 | 0.589 | 3.164 | |
| 1,600,000 | 0.307 | 1.619 | 0.587 | 2.961 | |
| Parameters | Symbols | S175 | Bulk Carrier |
|---|---|---|---|
| Length between perpendiculars | LPP | 175 m | 295.2 m |
| Breadth | B | 25.4 m | 50.0 m |
| Draft | T | 9.5 m | 18.5 m |
| Waterplane area | AW | 3156 m2 | 13,798.8 m2 |
| Ship displacement | ∇ | 24742 t | 233,928 t |
| Height of gravity center | zg | 9.52 m | 14.28 m |
| Longitudinal position of gravity center | xg | −2.48 m | 0.0 m |
| Longitudinal radius of gyration | Kyy | 0.24 Lpp | 0.25 Lpp |
| Natural rolling period | Tϕ | 18 s | 5.88 s |
| Molded depth | H | 15.4 m | 25.0 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, M.; Fan, X.; Li, C.; Li, J.; He, D.; Zhu, R. Machine Learning-Based Recursive Prediction and Application of Green’s Function of Water-Wave Radiation and Diffraction. J. Mar. Sci. Eng. 2025, 13, 1488. https://doi.org/10.3390/jmse13081488
Zheng M, Fan X, Li C, Li J, He D, Zhu R. Machine Learning-Based Recursive Prediction and Application of Green’s Function of Water-Wave Radiation and Diffraction. Journal of Marine Science and Engineering. 2025; 13(8):1488. https://doi.org/10.3390/jmse13081488
Chicago/Turabian StyleZheng, Minmin, Xinsheng Fan, Chuanqing Li, Jianpeng Li, Duolun He, and Renchuan Zhu. 2025. "Machine Learning-Based Recursive Prediction and Application of Green’s Function of Water-Wave Radiation and Diffraction" Journal of Marine Science and Engineering 13, no. 8: 1488. https://doi.org/10.3390/jmse13081488
APA StyleZheng, M., Fan, X., Li, C., Li, J., He, D., & Zhu, R. (2025). Machine Learning-Based Recursive Prediction and Application of Green’s Function of Water-Wave Radiation and Diffraction. Journal of Marine Science and Engineering, 13(8), 1488. https://doi.org/10.3390/jmse13081488