
Improved Model Predictive Control Algorithm for the Path Tracking Control of Ship Autonomous Berthing

Abstract
1. Introduction
- (1)
- A four-degree-of-freedom (4-DOF) ship motion model is developed, incorporating low-speed berthing, shallow water effects, and external disturbances such as wind and waves, to more accurately simulate ship dynamics in complex sea conditions.
- (2)
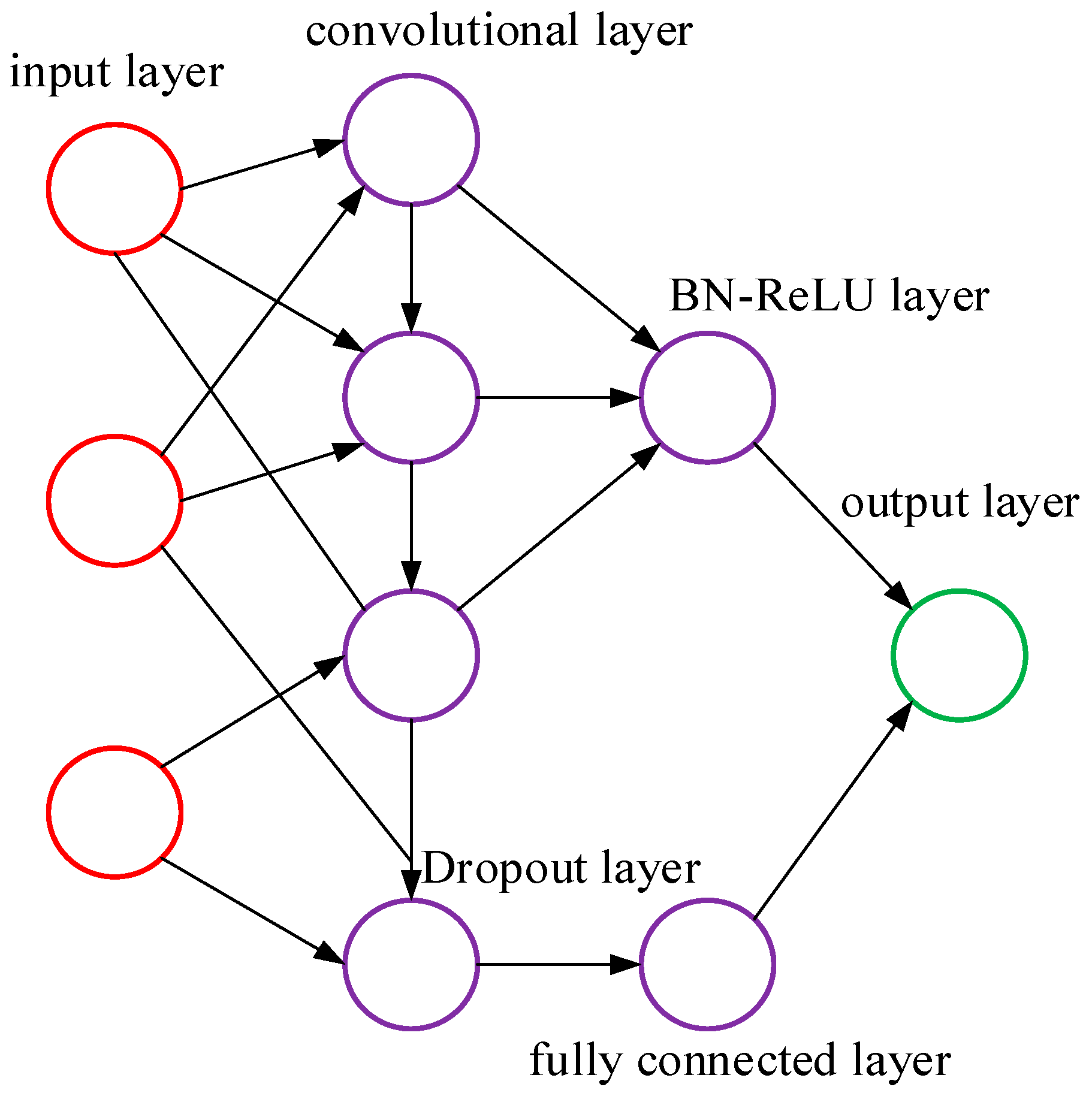
- A cooperative control framework based on CNN and NMPC is constructed to achieve high-precision path prediction and optimal control.
- (3)
- A high-precision path tracking control method is designed that accounts for ship motion constraints and environmental disturbances, effectively reducing overshoot and oscillations while enhancing system stability and robustness.
2. Mathematical Model of Ship Motion
3. Path Tracking Control Method Design
3.1. CNN
3.2. NMPC
4. Stability Analysis
- (1)
- The reference trajectory is continuously bounded.
- (2)
- Control inputs meet system controllability requirements.
- (3)
- The CNN prediction module has a finite error bound , where is adjustable.
5. Simulation Experiments
6. Conclusions
- (1)
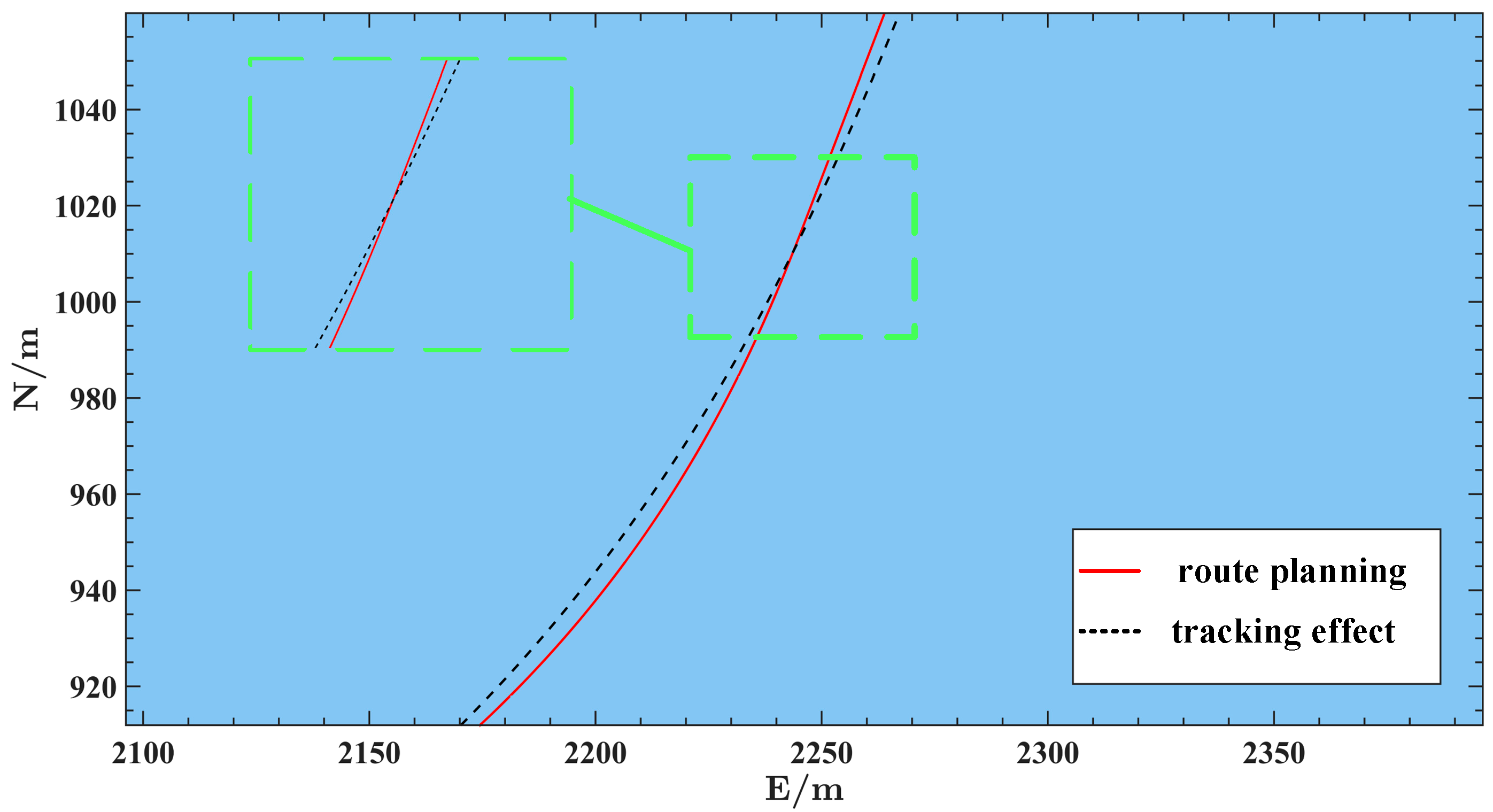
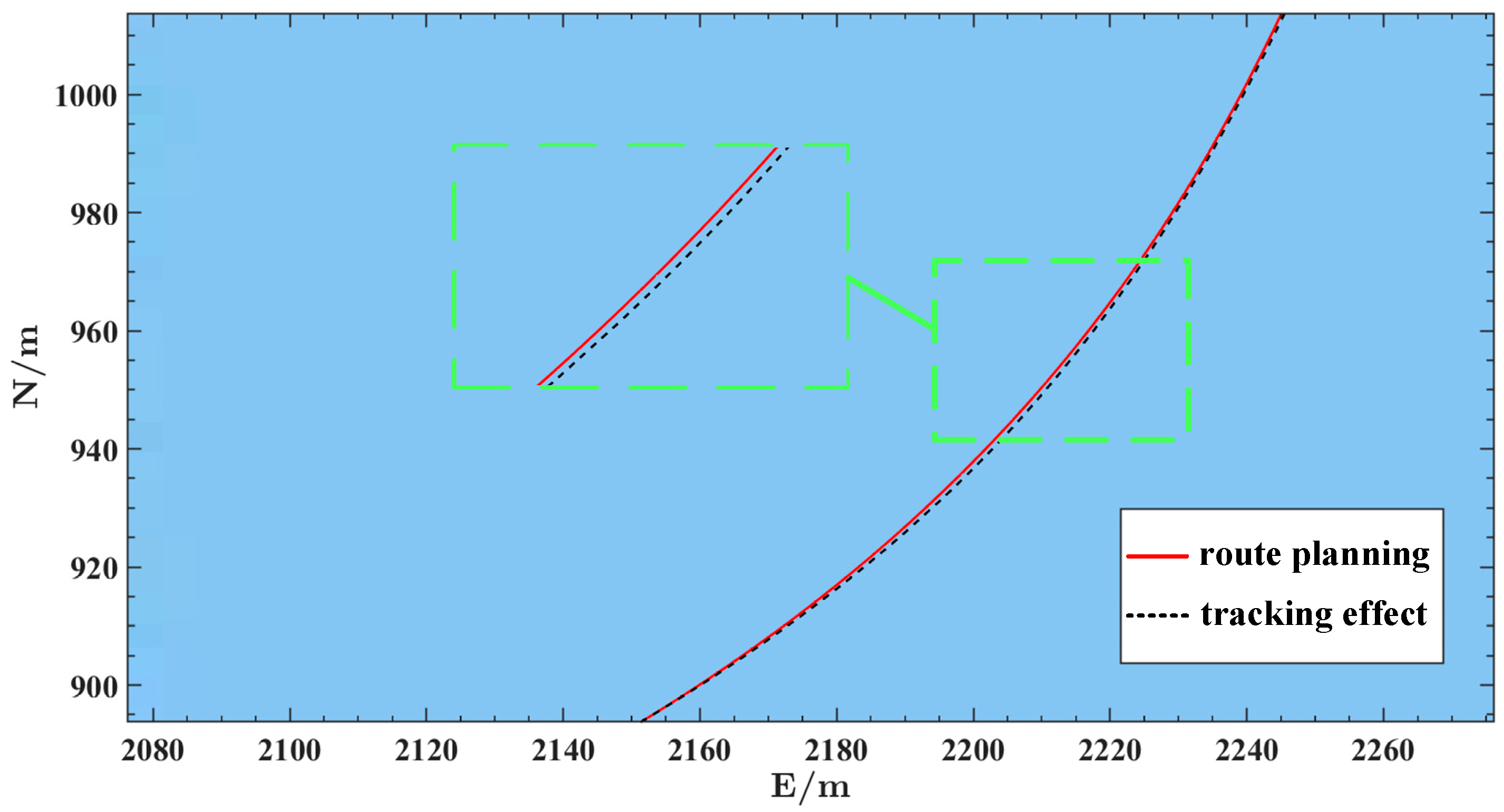
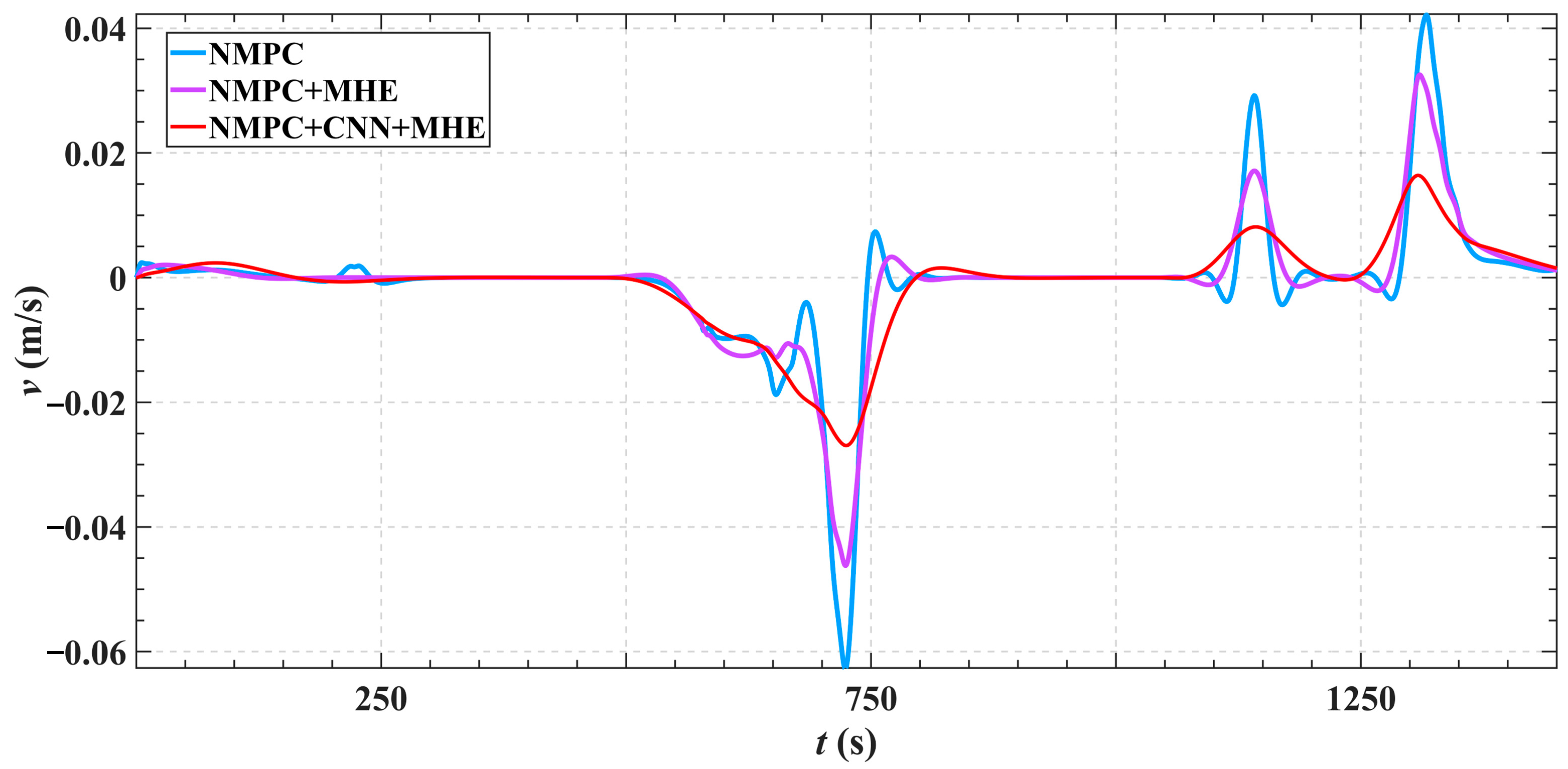
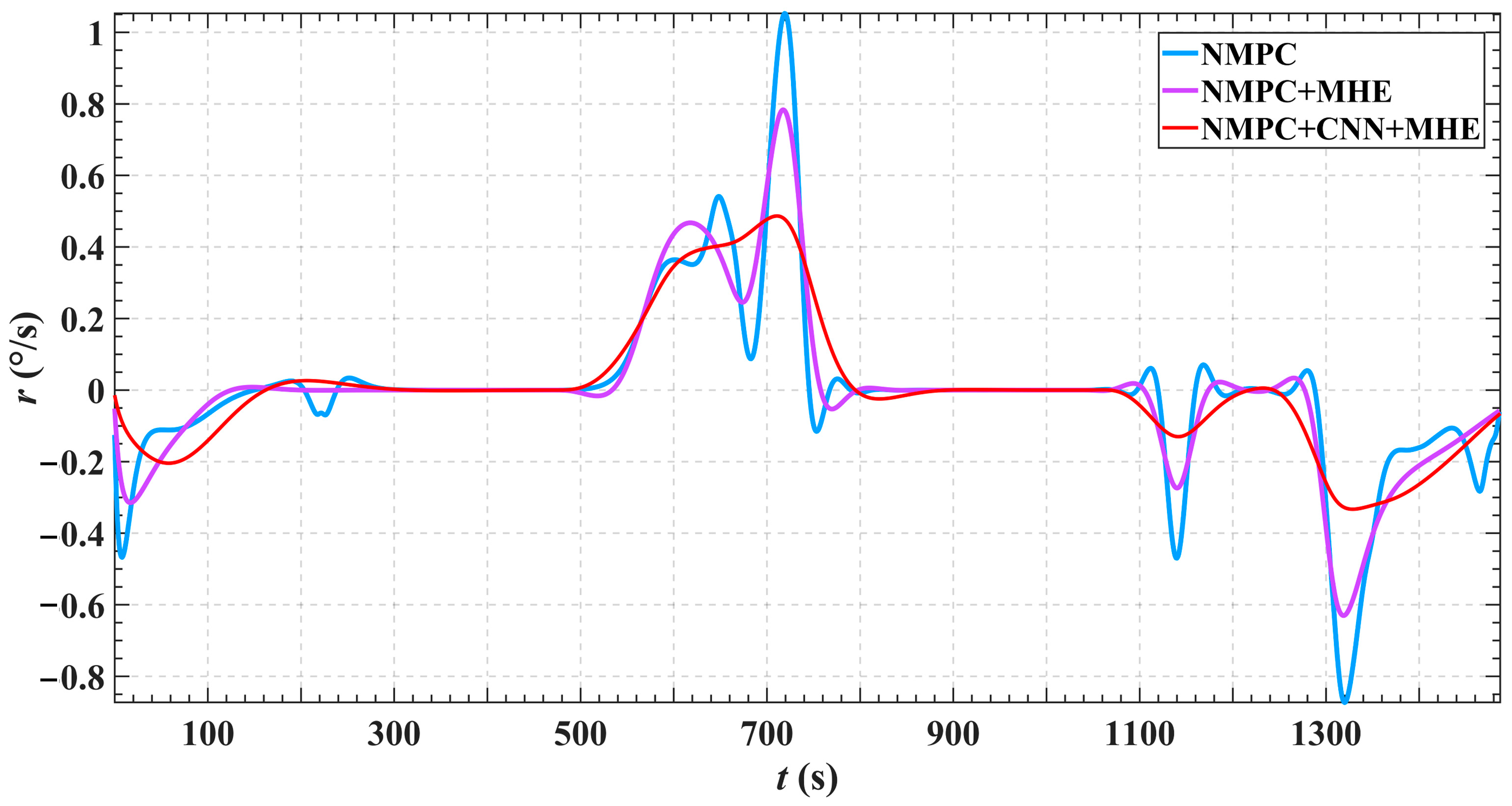
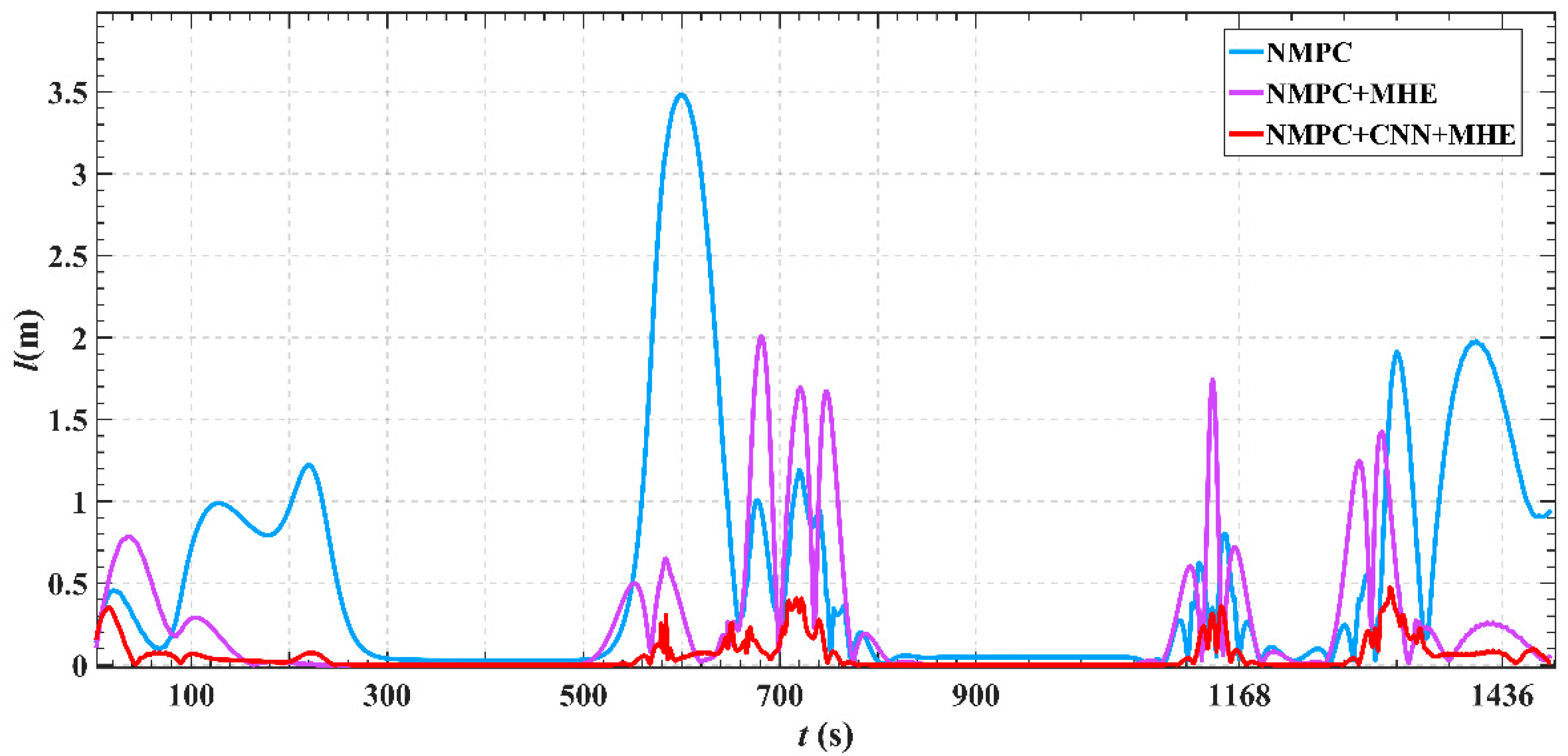
- The dynamic responses of each velocity component remain smooth with minimal fluctuations, reducing speed deviations caused by environmental disturbances. This ensures the ship maintains effective motion during berthing. The path tracking error is significantly reduced to improve the control accuracy.
- (2)
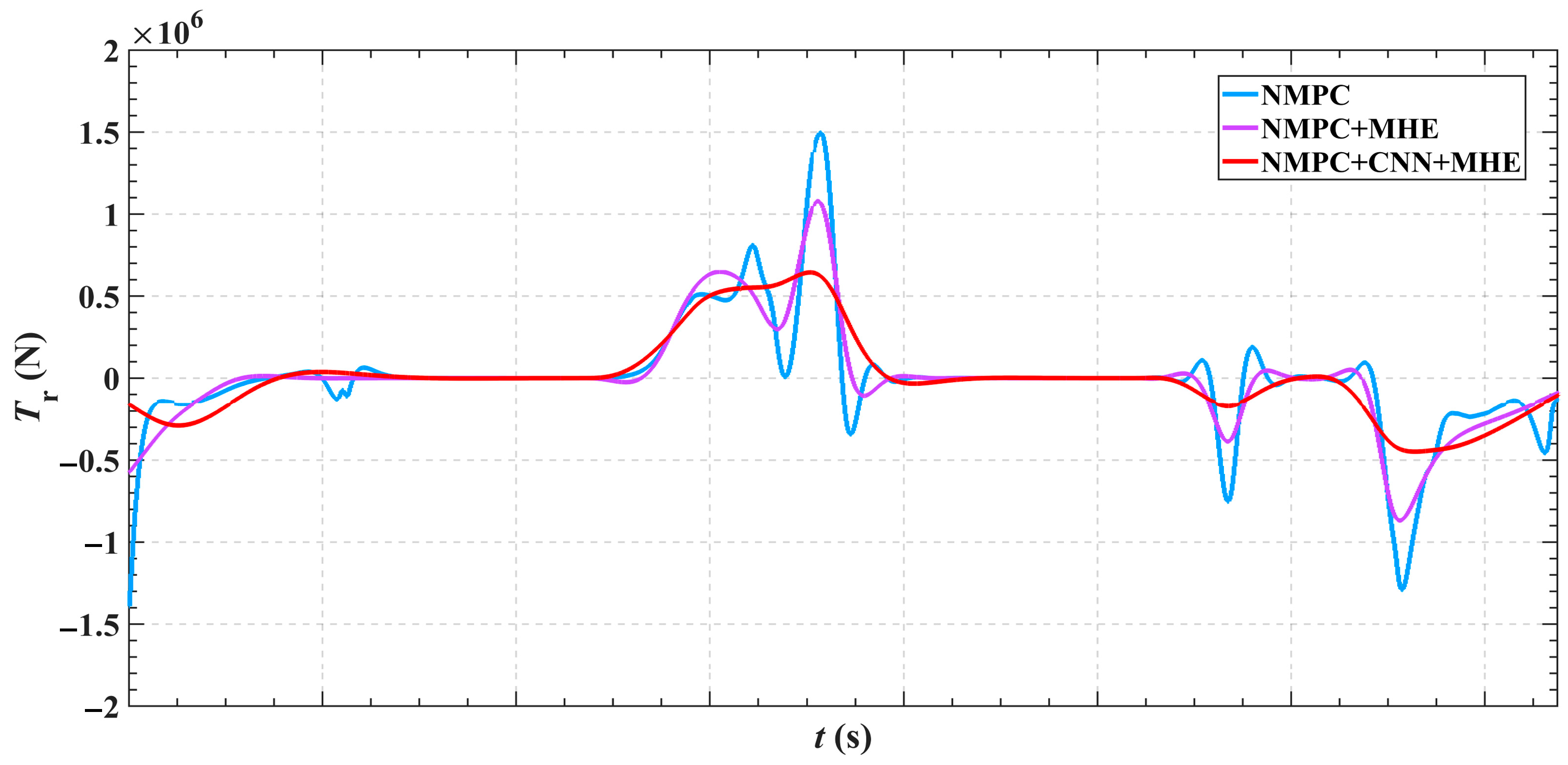
- By integrating a CNN and a moving optimization mechanism, the system demonstrates enhanced robustness and stability under complex conditions such as wind and wave disturbances. Control commands remain smooth with no significant overshoot, reflecting superior dynamic response performance.
- (3)
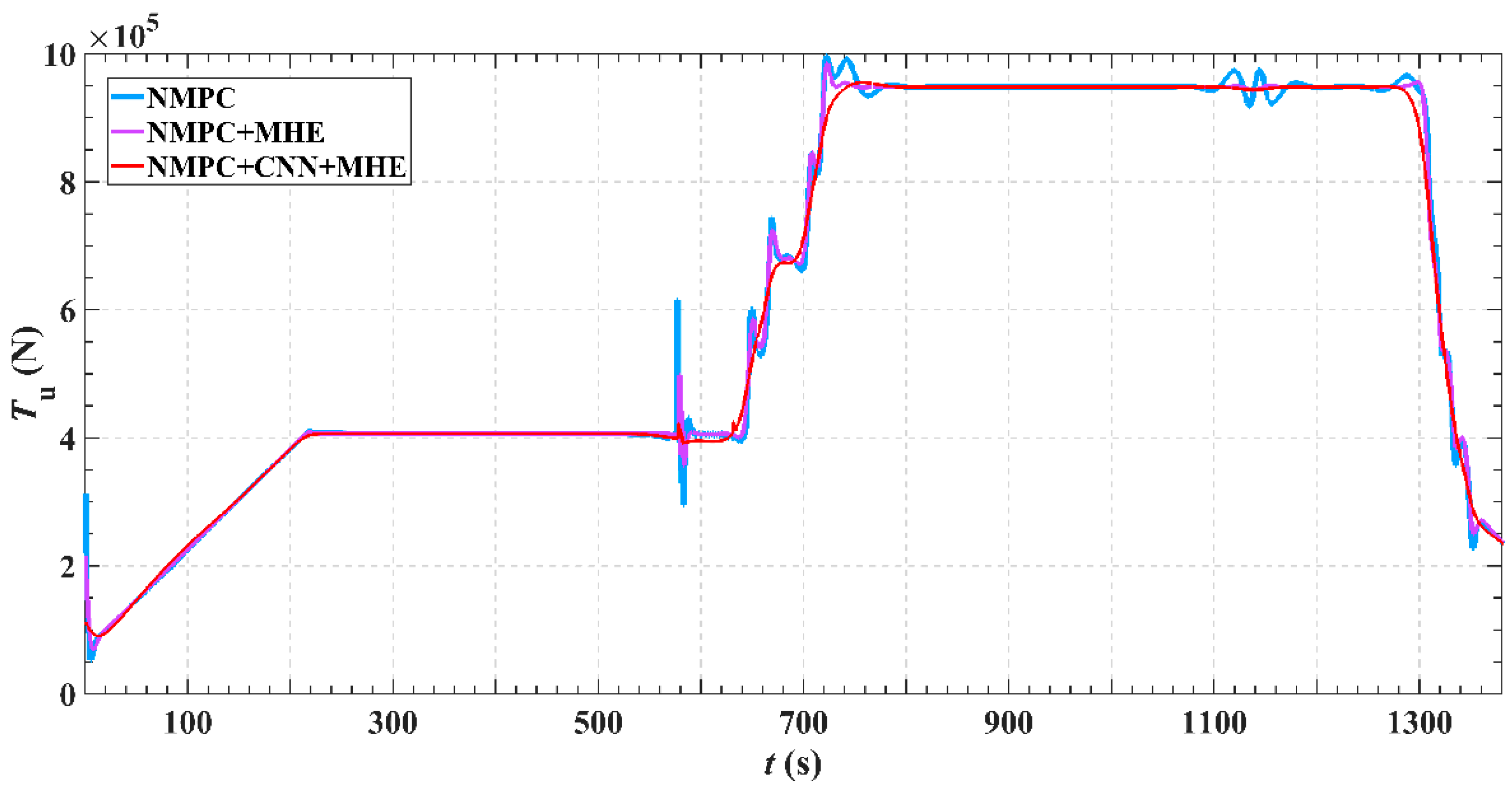
- The control inputs exhibit smooth, continuous variations without abrupt changes, enhancing both system stability and energy efficiency. This indicates that the control method can effectively handle various disturbances and path variations, demonstrating strong environmental adaptability and control robustness.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, G.Q.; Zhang, X.K.; Guan, W. Concise robust adaptive path following control for underactuated ships. J. Harbin Eng. Univ. 2014, 35, 1053–1059. (In Chinese) [Google Scholar]
- Min, B.; Zhang, X. Concise robust fuzzy nonlinear feedback track keeping control for ships using multi-technique improved LOS guidance. Ocean Eng. 2021, 224, 108734. [Google Scholar] [CrossRef]
- Zhang, X.-K.; Zhang, Q.; Ren, H.-X.; Yang, G.-P. Linear reduction of backstepping algorithm based on nonlinear decoration for ship course-keeping control system. Ocean Eng. 2018, 147, 1–8. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Chen, C.; Zhang, J.; Zhan, Z.H. Scale adaptive fitness evaluation-based particle swarm optimization for hyperparameter and architecture optimization in neural networks and deep learning. CAAI Trans. Intell. Technol. 2022, 8, 849–862. [Google Scholar] [CrossRef]
- Yuan, S.; Liu, Z.; Zheng, L.; Sun, Y.; Wang, Z. Event-based adaptive horizon nonlinear model predictive control for trajectory tracking of marine surface vessel. Ocean Eng. 2022, 258, 111082. [Google Scholar] [CrossRef]
- Song, C.; Qiao, Q.; Sui, J. Pitching Stabilization Control for Super Large Ships Based on Double Nonlinear Positive Feedback under Rough Sea Conditions. J. Mar. Sci. Eng. 2024, 12, 1657. [Google Scholar] [CrossRef]
- Song, C.; Zhang, X.; Zhang, G. Attitude prediction of ship coupled heave–pitch motions using nonlinear innovation via full-scale test data. Ocean Eng. 2022, 264, 112524. [Google Scholar] [CrossRef]
- Han, X. Ship Berthing Path Planning with Model Predictive Track Keeping Control. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2023. (In Chinese). [Google Scholar]
- Godhavn, J.; Fossen, T.; Berge, S. Non-linear and adaptive backstepping designs for tracking control of ships. Int. J. Adapt. Control. Signal Process. 1998, 12, 649–670. [Google Scholar] [CrossRef]
- Fossen, T.I.; Strand, J.P. Tutorial on nonlinear backstepping: Applications to ship control. Model. Identif. Control. 1999, 20, 83–135. [Google Scholar] [CrossRef]
- Liu, S.; Song, J.; Zhang, L.; Tan, Y. Adaptive finite-time backstepping integral sliding mode control of three-degree-of-freedom stabilized system for ship propulsion-assisted sail based on the inverse system method. J. Mar. Sci. Eng. 2024, 12, 348. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Trans. 2015, 56, 75–85. [Google Scholar] [CrossRef]
- Zhang, G.; Li, J.; Jin, X.; Liu, C. Robust adaptive neural control for wing-sail-assisted vehicle via the multiport event-triggered approach. IEEE Trans. Cybern. 2021, 52, 12916–12928. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Li, Z.; Liu, J.; Zheng, X.; Yu, X.; Kaynak, O. Adaptive neural network backstepping control method for aerial manipulator based on coupling disturbance compensation. J. Frankl. Inst. 2024, 361, 106733. [Google Scholar] [CrossRef]
- Fan, Y.; Zou, X.; Wang, G.; Mu, D. Robust adaptive path following control strategy for underactuated unmanned surface vehicles with model deviation and actuator saturation. Appl. Sci. 2022, 12, 2696. [Google Scholar] [CrossRef]
- Remmas, W.; Chemori, A.; Kruusmaa, M. Fault-tolerant control allocation for a bio-inspired underactuated AUV in the presence of actuator failures: Design and experiments. Ocean Eng. 2023, 285, 115327. [Google Scholar] [CrossRef]
- Lin, X.; Tang, Y.; Zhou, B. Improved model predictive control path tracking strategy based an online updating algorithm with cosine similarity and a horizon factor. IEEE Trans. Intell. Transp. Syst. 2021, 23, 12429–12438. [Google Scholar] [CrossRef]
- Menges, D.; Tengesdal, T.; Rasheed, A. Nonlinear Model Predictive Control for Enhanced Navigation of Autonomous Surface Vessels. IFAC-PapersOnLine 2024, 58, 296–302. [Google Scholar] [CrossRef]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. A Formation Autonomous Navigation System for Unmanned Surface Vehicles With Distributed Control Strategy. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2834–2845. [Google Scholar] [CrossRef]
- Song, C.; Guo, T.; Sui, J. Ship path planning based on improved multi-scale a* algorithm of collision risk function. Sci. Rep. 2024, 14, 30418. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Integrating dynamic event-triggered and sensor-tolerant control: Application to usv-uavs cooperative formation system for maritime parallel search. IEEE Trans. Intell. Transp. Syst. 2023, 25, 3986–3998. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, W.; Shan, Q.; Zhang, W. Cooperative path following control of USV-UAVs considering low design complexity and command transmission requirements. IEEE Trans. Intell. Veh. 2023, 9, 715–724. [Google Scholar] [CrossRef]
- Alessandri, A. Robust moving horizon estimation for nonlinear systems: From perfect to imperfect optimization. Automatica 2025, 175, 112187. [Google Scholar] [CrossRef]
- Chen, G.; Ding, C.; Yin, J.; Zhu, H.; Li, Y. Study on automatic berthing of large under-actuated vessel with multi-tug collaboration. Ocean Eng. 2025, 325, 120709. [Google Scholar] [CrossRef]
- Liu, Y.; Im, N.-K.; Zhang, Q.; Zhu, G. Adaptive auto-berthing control of underactuated vessel based on barrier lyapunov function. J. Mar. Sci. Eng. 2022, 10, 279. [Google Scholar] [CrossRef]
- Shen, Z. Ship Motion Adaptive Sliding Mode Control; Science Press: Beijing, China, 2019. (In Chinese) [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Numerical Value (kg) | Notation | Numerical Value (kg) |
|---|---|---|---|
| Control Variable | NMPC | NMPC + MHE | CNN + NMPC + MHE | Percentage Increase |
|---|---|---|---|---|
| surge and sway velocity deviation | 3.0 m | 2.0 m | 1.0 m | 66.67% |
| yaw rate | 4.5 rad/s | 3.3 rad/s | 2.3 rad/s | 48.89% |
| roll rate | 0.04 rad/s | 0.03 rad/s | 0.01 rad/s | 75.00% |
| track error | 3.4 m | 1.3 m | 0.4 m | 88.24% |
| longitudinal thrust | 8.0 × 105 N | 7.2 × 105 N | 4.4 × 105 N | 45.50% |
| yaw moment | 1.5 × 106 N | 1.3 × 106 N | 0.3 × 106 N | 80.67% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, C.; Guo, X.; Sui, J. Improved Model Predictive Control Algorithm for the Path Tracking Control of Ship Autonomous Berthing. J. Mar. Sci. Eng. 2025, 13, 1273. https://doi.org/10.3390/jmse13071273
Song C, Guo X, Sui J. Improved Model Predictive Control Algorithm for the Path Tracking Control of Ship Autonomous Berthing. Journal of Marine Science and Engineering. 2025; 13(7):1273. https://doi.org/10.3390/jmse13071273
Chicago/Turabian StyleSong, Chunyu, Xiaomin Guo, and Jianghua Sui. 2025. "Improved Model Predictive Control Algorithm for the Path Tracking Control of Ship Autonomous Berthing" Journal of Marine Science and Engineering 13, no. 7: 1273. https://doi.org/10.3390/jmse13071273
APA StyleSong, C., Guo, X., & Sui, J. (2025). Improved Model Predictive Control Algorithm for the Path Tracking Control of Ship Autonomous Berthing. Journal of Marine Science and Engineering, 13(7), 1273. https://doi.org/10.3390/jmse13071273