
Improved Super-Twisting Sliding Mode Control of a Brushless Doubly Fed Induction Generator for Standalone Ship Shaft Power Generation Systems



Abstract
1. Introduction
- (1)
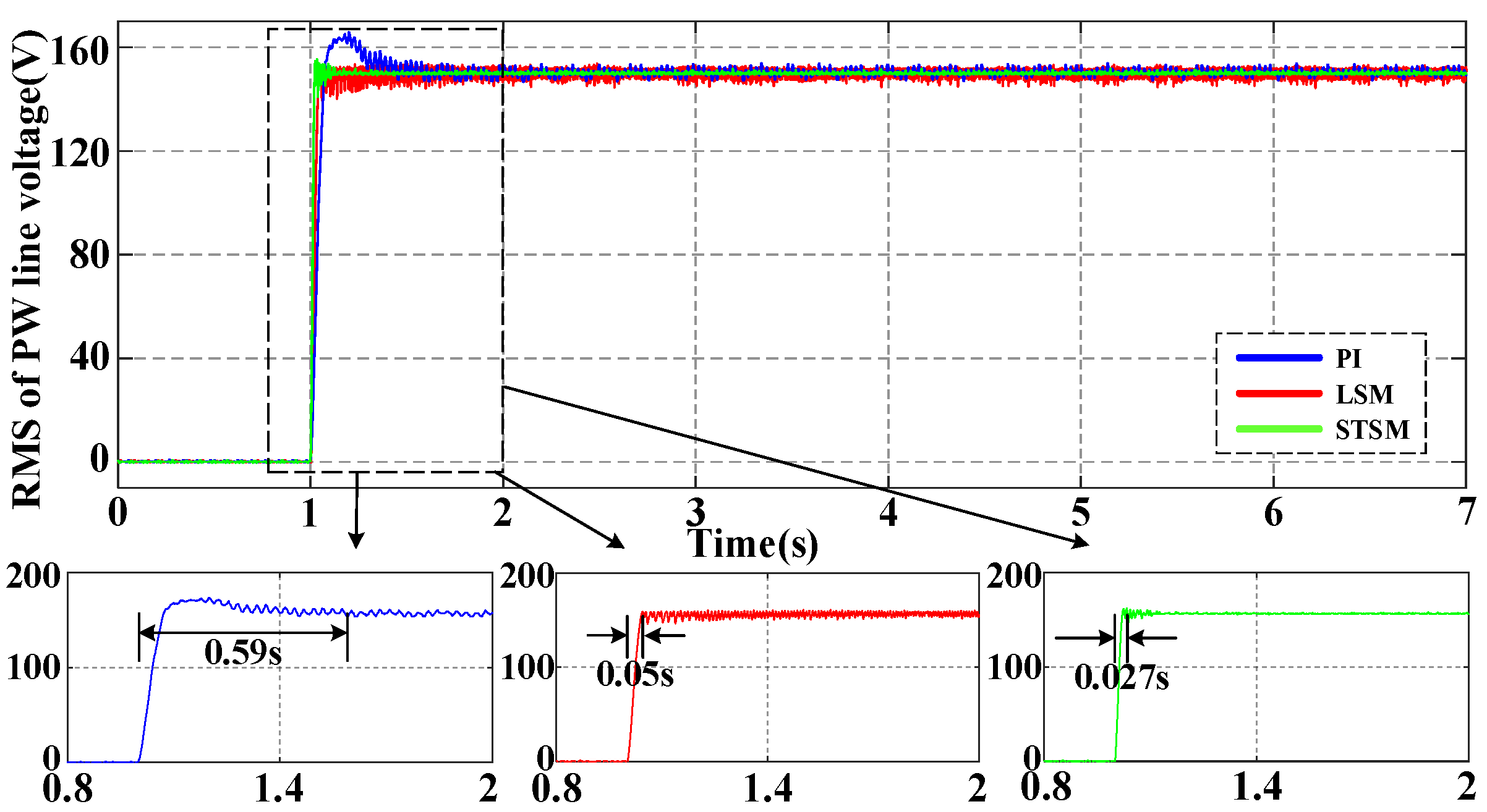
- Compared with traditional controllers, the improved STSM control method avoids the low-pass filter and improves the transient response of the terminal voltage.
- (2)
- The matched and mismatched uncertainties in BDFIG-based ship shaft power generation systems are considered and compensated.
2. BDFIG Mathematical Model with Perturbations
2.1. Traditional BDFIG Model
2.2. Parameter Perturbation Analysis
3. STSM Controller Design
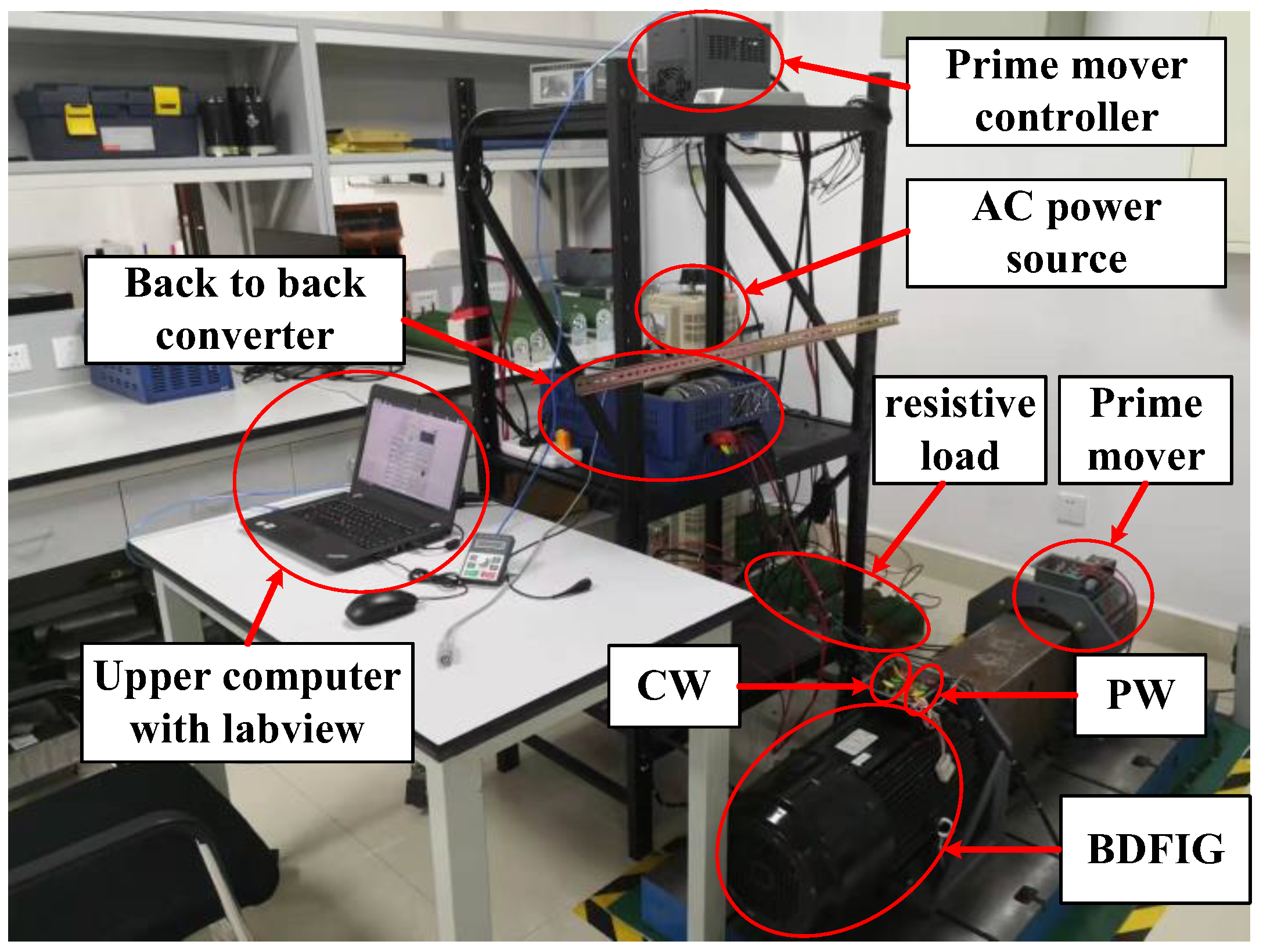
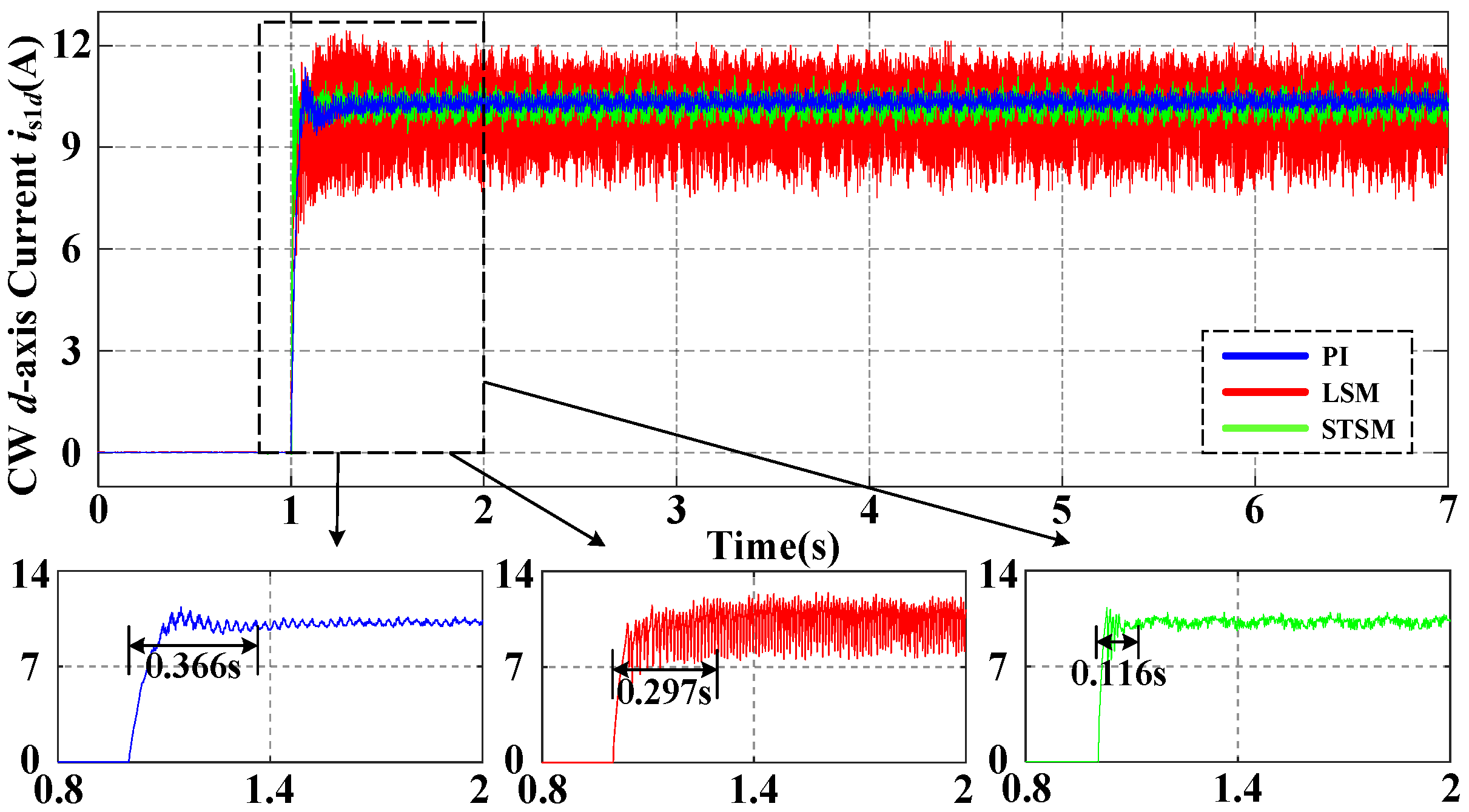
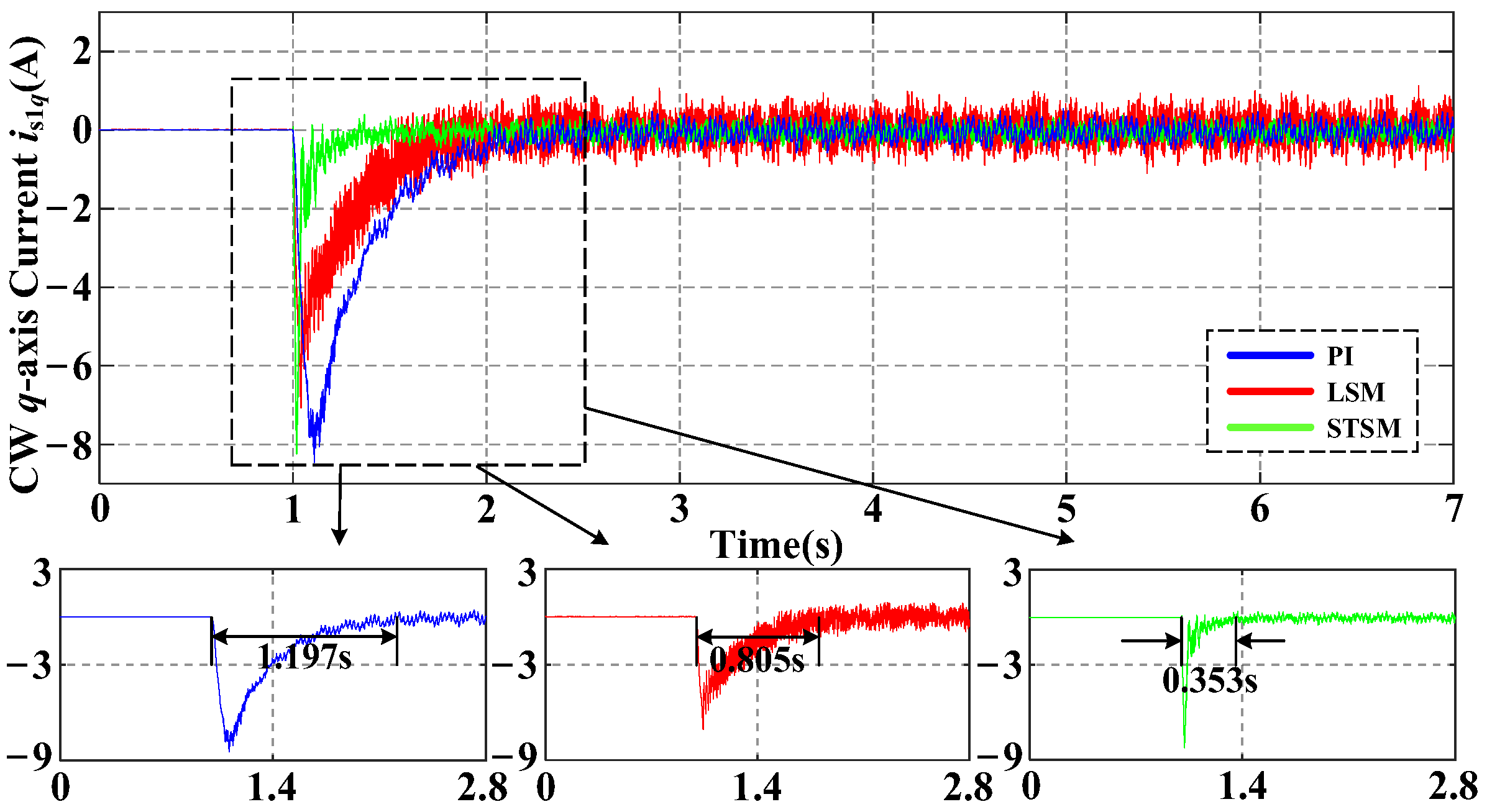
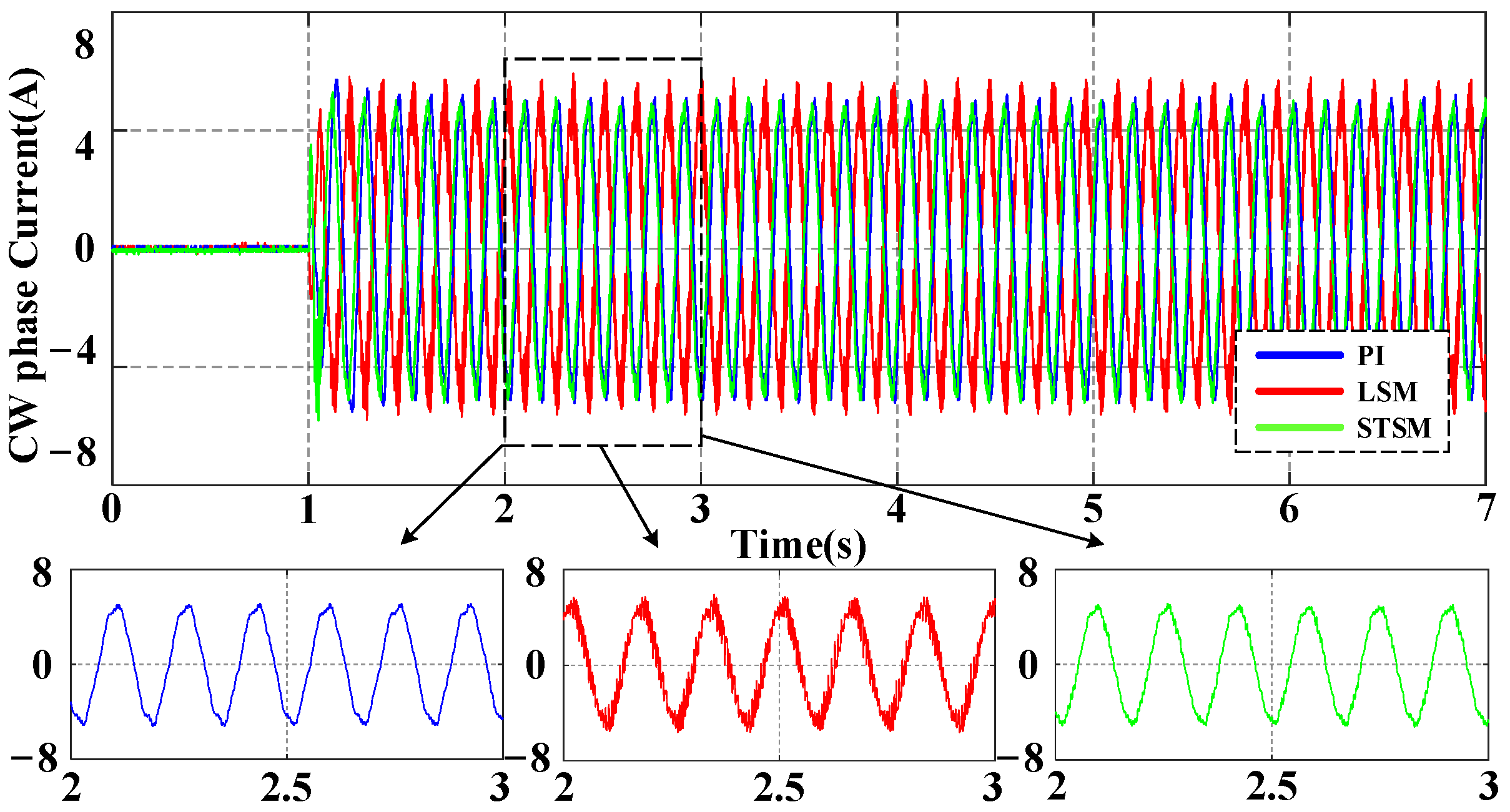
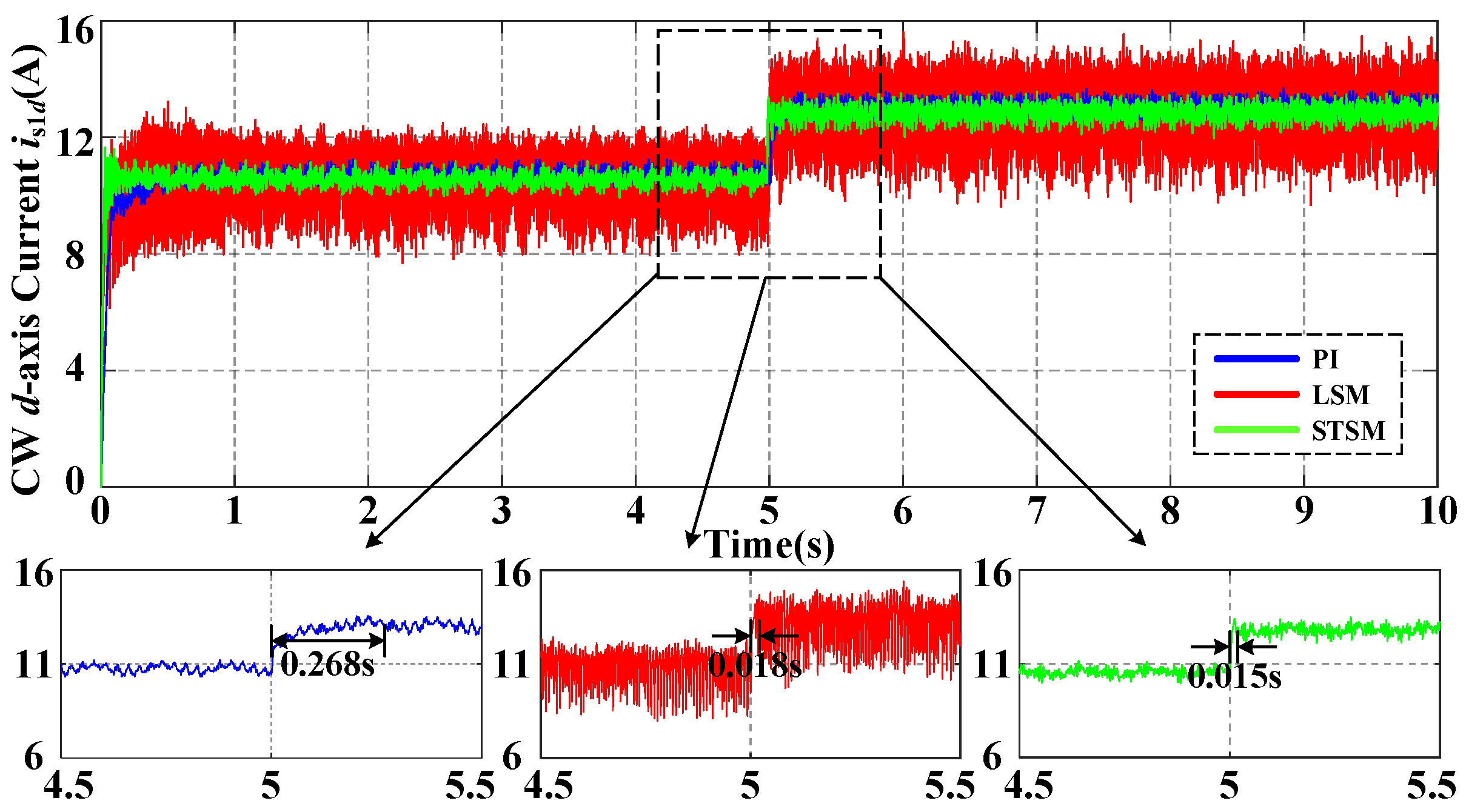
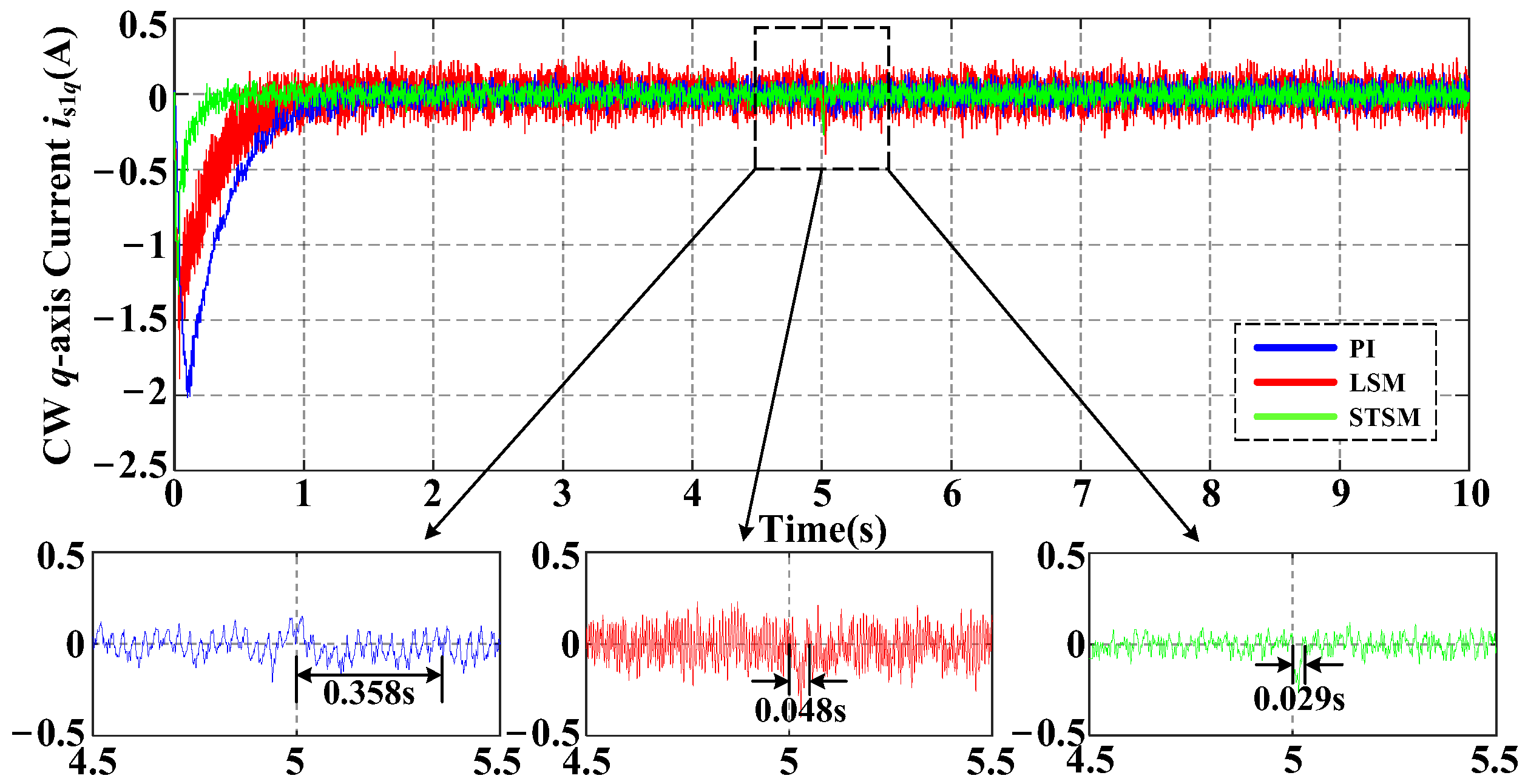
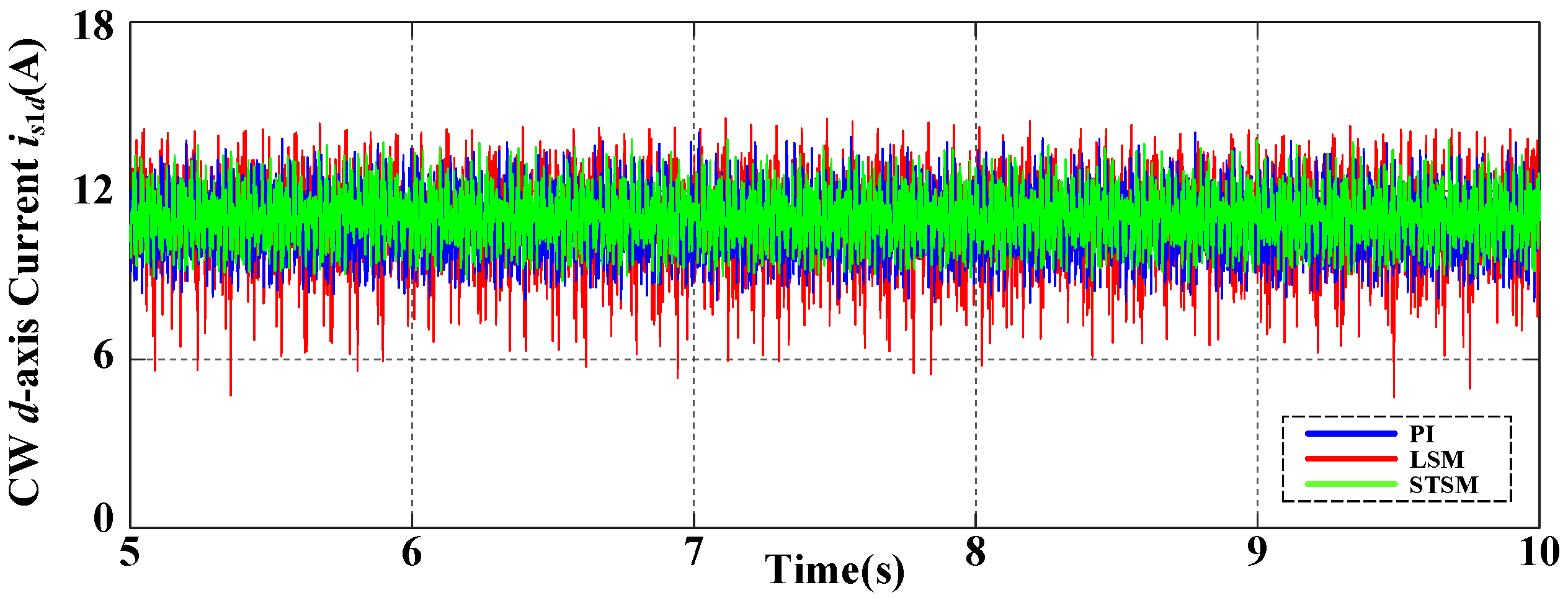
4. Experimental Results
5. Conclusions
- (1)
- Real-world component selection and constraints: idealized components are assumed in the theoretical controller design and experimental validation. However, practical applications face challenges related to the component’s selection, bandwidth limitations, noise sensitivity, the cost-effectiveness of high-bandwidth sensors, and marine operating conditions (vibration, high temperature, high humidity).
- (2)
- Computational complexity: the improved STSM method, while effective, has high computational requirements, especially for the existing control chip of the ships.
- (1)
- Hardware implementation: to verify the controller’s effectiveness, rigorous tests simulating real marine environments and using commercial chip will be conducted in our future studies.
- (2)
- Algorithm optimization: methods reducing the computational burden of the proposed improved STSM will be explored in our future research.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| STSM | super-twisting sliding mode |
| BDFIG | brushless doubly fed induction generator |
| CW | control winding |
| PW | power winding |
| SMC | sliding mode control |
| ISMC | integral SMC |
| VC | vector control |
| TSMC | terminal sliding mode control |
| STSMC | super-twisting sliding mode controller |
| PI | Proportional integral |
| LSM | linear sliding mode |
| ADRC | active disturbance rejection control |
References
- Liu, Y.; Hussien, M.G.; Xu, W.; Shao, S.; Rashad, E.M. Recent Advances of Control Technologies for Brushless Doubly-Fed Generators. IEEE Access 2021, 9, 123324–123347. [Google Scholar] [CrossRef]
- Knight, A.M.; Betz, R.E.; Dorrell, D.G. Design and Analysis of Brushless Doubly Fed Reluctance Machines. IEEE Trans. Ind. Appl. 2021, 49, 50–58. [Google Scholar] [CrossRef]
- Abad, G.; Lopez, J.; Rodriguez, M.; Marroyo, L.; Iwanski, G. Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Boldea, I.; Tutelea, L.N.; Wu, C.; Blaabjerg, F.; Liu, Y.; Hussien, M.G.; Xu, W. Fractional kVA Rating PWM Converter Doubly Fed Variable Speed Electric Generator Systems: An Overview in 2020. IEEE Access 2021, 9, 117957–117968. [Google Scholar] [CrossRef]
- Xu, W.; Dong, D.; Liu, Y.; Yu, K.; Gao, J. Improved sensorless phase control of stand-alone brushless doubly-fed machine under unbalanced loads for ship shaft power generation. IEEE Trans. Energy Convers. 2018, 33, 2229–2239. [Google Scholar] [CrossRef]
- Vadim, K.; Goncharov, N. Problem statement on the vessel braking within ice channel, Transportation Safety and Environment. Transp. Saf. Environ. 2021, 3, 50–56. [Google Scholar]
- Chen, X.; Wei, C.; Xin, Z.; Zhao, J.; Xian, J. Ship Detection under Low-Visibility Weather Interference via an Ensemble Generative Adversarial Network. J. Mar. Sci. Eng. 2023, 11, 2065. [Google Scholar] [CrossRef]
- Shao, S.; Abdi, E.; Barati, F.; McMahon, R. Stator-flux-oriented vector control for brushless doubly fed induction generator. IEEE Trans. Ind. Electron. 2009, 56, 4220–4228. [Google Scholar] [CrossRef]
- Hussien, M.G.; Liu, Y.; Xu, W.; Junejo, A.K.; Allam, S.M. Improved MRAS Rotor Position Observer Based on Control Winding Power Factor for Stand-Alone Brushless Doubly-Fed Induction Generators. IEEE Trans. Energy Convers. 2022, 37, 707–717. [Google Scholar] [CrossRef]
- Poza, J.; Oyarbide, E.; Sarasola, I.; Rodriguez, M. Vector control design and experimental evaluation for the brushless doubly fed machine. IET Electr. Power Appl. 2009, 3, 247–256. [Google Scholar] [CrossRef]
- Boudjema, Z.; Taleb, R.; Djeriri, Y.; Yahdou, A. A novel direct torque control using second order continuous sliding mode of a doubly fed induction generator for a wind energy conversion system. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 965–975. [Google Scholar] [CrossRef]
- Sadeghi, R.; Madani, S.M.; Ataei, M.; Kashkooli, M.R.A.; Ademi, S. Super-twisting sliding mode direct power control of a brushless doubly fed induction generator. IEEE Trans. Ind. Electron. 2018, 65, 9147–9156. [Google Scholar] [CrossRef]
- Yan, X.; Cheng, M. A robustness-improved control method based on ST-SMC for cascaded brushless doubly fed induction generator. IEEE Trans. Ind. Electron. 2020, 68, 7061–7071. [Google Scholar] [CrossRef]
- Sankhwar, P. Application of Permanent Magnet Synchronous Motor for Electric Vehicle. Indian J. Des. Eng. 2024, 4, 1–6. [Google Scholar] [CrossRef]
- Guo, H.; Zhang, X. Extended State Observer (ESO) Based Control Strategy with Parameter Optimization for Brushless Doubly-fed Machine. In Proceedings of the 2017 2nd International Conference on Automatic Control and Information Engineering (ICACIE 2017), Hong Kong, China, 26–28 August 2017. [Google Scholar]
- Utkin, V.; Poznyak, A.; Orlov, Y.; Polyakov, A. Conventional and high order sliding mode control. J. Frankl. Inst. 2020, 357, 10244–10261. [Google Scholar] [CrossRef]
- Pan, Y.; Yang, C.; Pan, L.; Yu, H. Integral sliding mode control: Performance, modification, and improvement. IEEE Trans. Ind. Inform. 2017, 14, 3087–3096. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Han, F. On nonsingular terminal sliding-mode control of nonlinear systems. Automatica 2013, 49, 1715–1722. [Google Scholar] [CrossRef]
- Feng, Y.; Han, F.; Yu, X. Chattering free full-order sliding-mode control. Automatica 2014, 50, 1310–1314. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control. 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Levant, A. Chattering analysis. IEEE Trans. Autom. Control. 2010, 55, 1380–1389. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. Strict Lyapunov functions for the super-twisting algorithm. IEEE Trans. Autom. Control. 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Manzanilla, A.; Ibarra, E.; Salazar, S.; Zamora, Á.E.; Lozano, R.; Muñoz, F. Super-twisting integral sliding mode control for trajectory tracking of an Unmanned Underwater Vehicle. Ocean. Eng. 2021, 234, 109164. [Google Scholar] [CrossRef]
- Yang, X.; Qin, Y.; Zhan, J.; Li, Y.; Hao, S.; Fu, Z. Direct Power Control of BDFRG Based on Novel Integral Sliding Mode Control. Recent Adv. Electr. Electron. Eng. 2024, 17, 1–16. [Google Scholar] [CrossRef]
- Zhan, Y.; Guo, Y.; Zhu, J. Terminal sliding mode speed controller based on vector control for brushless doubly fed machine. In Proceedings of the 2011 International Conference on Applied Superconductivity and Electromagnetic Devices, Sydney, Australia, 14–16 December 2011. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Capacity | 3 kW | Rr | 8.691 Ω |
| PW pole pairs | 1 | Rs | 4.21 Ω |
| PW pole pairs | 2 | Rs1 | 3.10 Ω |
| Natural speed | 1000 rpm | Ls | 1.510 H |
| Speed range | 700–1200 rpm | Ls1 | 0.8908 H |
| PW rated voltage | 380 V | Lr | 2.134 H |
| PW rated current | 4.5 A | Lsr | 1.466 H |
| CW rated voltage | 350 V | Ls1r | 0.5911 H |
| CW rated current | 8 A | Rotor type | Wound rotor |
| Name | Convergence Time | Steady-State Accuracy | Chattering |
|---|---|---|---|
| ADRC | 4.50 s | 1.2 × 10−2 | free |
| ISMC | 3.15 s | 1.12 × 10−4 | exists |
| TSMC | 2.31 s | 1 × 10−2 | exists |
| Standard STSMC | 3.85 s | 4 × 10−2 | free |
| Improved STSMC | 0.83 s | 3 × 10−6 | free |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fei, X.; Zhou, M.; Jiang, Y.; Jiang, L.; Liu, Y.; Yan, Y. Improved Super-Twisting Sliding Mode Control of a Brushless Doubly Fed Induction Generator for Standalone Ship Shaft Power Generation Systems. J. Mar. Sci. Eng. 2025, 13, 1358. https://doi.org/10.3390/jmse13071358
Fei X, Zhou M, Jiang Y, Jiang L, Liu Y, Yan Y. Improved Super-Twisting Sliding Mode Control of a Brushless Doubly Fed Induction Generator for Standalone Ship Shaft Power Generation Systems. Journal of Marine Science and Engineering. 2025; 13(7):1358. https://doi.org/10.3390/jmse13071358
Chicago/Turabian StyleFei, Xueran, Minghao Zhou, Yingyi Jiang, Longbin Jiang, Yi Liu, and Yan Yan. 2025. "Improved Super-Twisting Sliding Mode Control of a Brushless Doubly Fed Induction Generator for Standalone Ship Shaft Power Generation Systems" Journal of Marine Science and Engineering 13, no. 7: 1358. https://doi.org/10.3390/jmse13071358
APA StyleFei, X., Zhou, M., Jiang, Y., Jiang, L., Liu, Y., & Yan, Y. (2025). Improved Super-Twisting Sliding Mode Control of a Brushless Doubly Fed Induction Generator for Standalone Ship Shaft Power Generation Systems. Journal of Marine Science and Engineering, 13(7), 1358. https://doi.org/10.3390/jmse13071358