
Predefined-Performance Sliding-Mode Tracking Control of Uncertain AUVs via Adaptive Disturbance Observer



Abstract
1. Introduction
- A prescribed-time convergent SM surface is presented, embedding dual performance constraints that regulate both trajectory tracking discrepancies and their rate variables, guaranteeing all error states enter designer-specified tolerance bounds within the user-defined temporal horizon;
- Utilizing the error transformation function, the constructed sliding-mode surface that meets the performance criteria remains unaffected by the initial conditions, ensuring that the error from any limited initial value can be restricted by the predetermined performance function following a specified duration;
- Taking into account uncertainties in parameters and external disturbances, a model referred to as AFTSMDO was developed to quickly estimate integrated disturbances and their derivatives in real time, without relying on the prior knowledge of disturbances.
2. Problem Formulation
2.1. Model of AUV
2.2. Assumption, Lemma, and Definition
- 1.
- are second-order differentiable functions;
- 2.
- and ;
- 3.
- In , are monotonically increasing, for any .
- 1.
- are differentiable and their derivatives are bounded;
- 2.
- ;
- 3.
- are monotonically decreasing functions in , and for any .
2.3. Control Objective
3. Main Results
3.1. AFTSMDO Design
- Step 1. It will be demonstrated that can be achieved in a finite time .
3.2. Controller Design
- 1.
- and , for any ;
- 2.
- , for any ;
- 3.
- , for any .
3.3. Stability Analysis
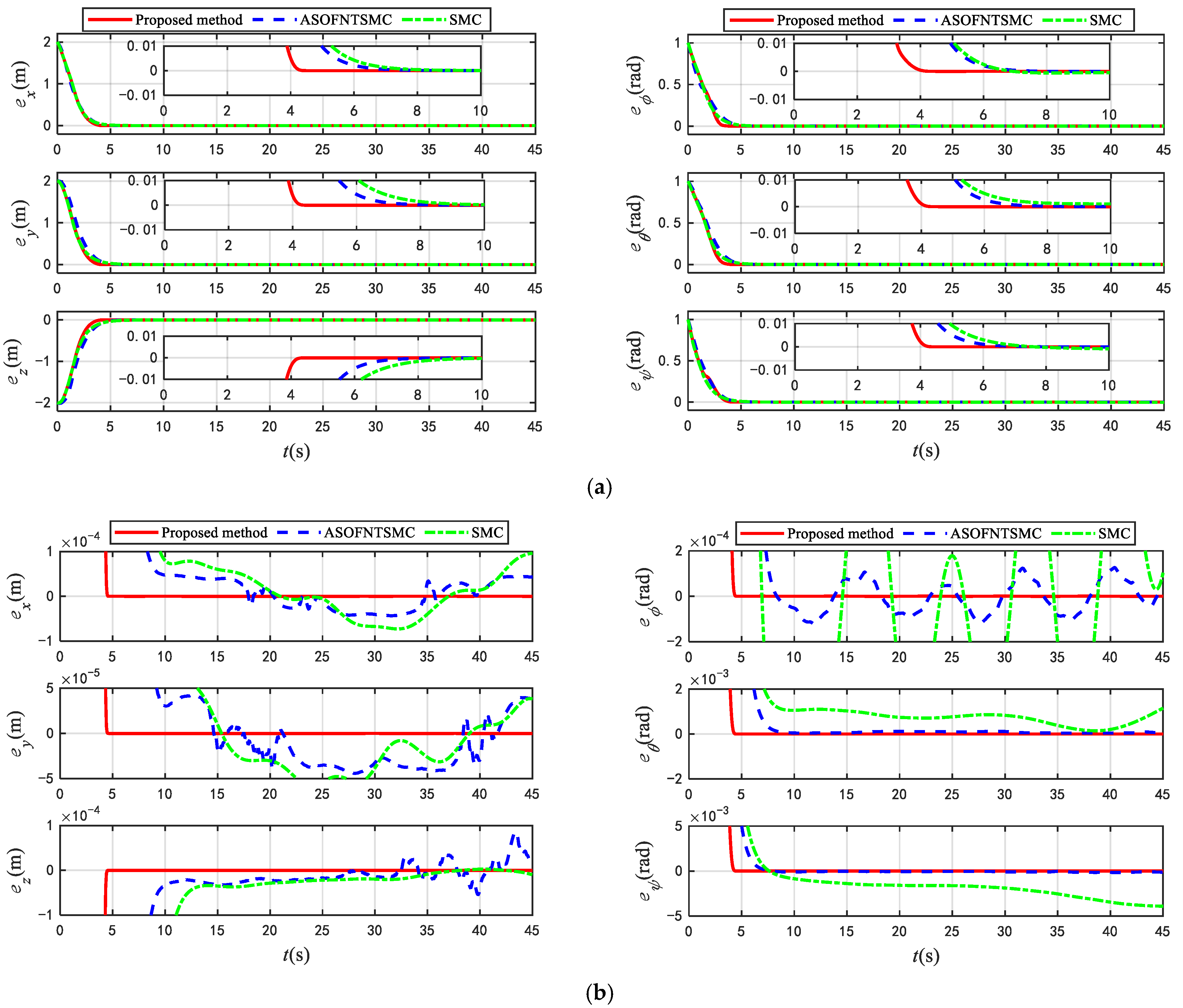
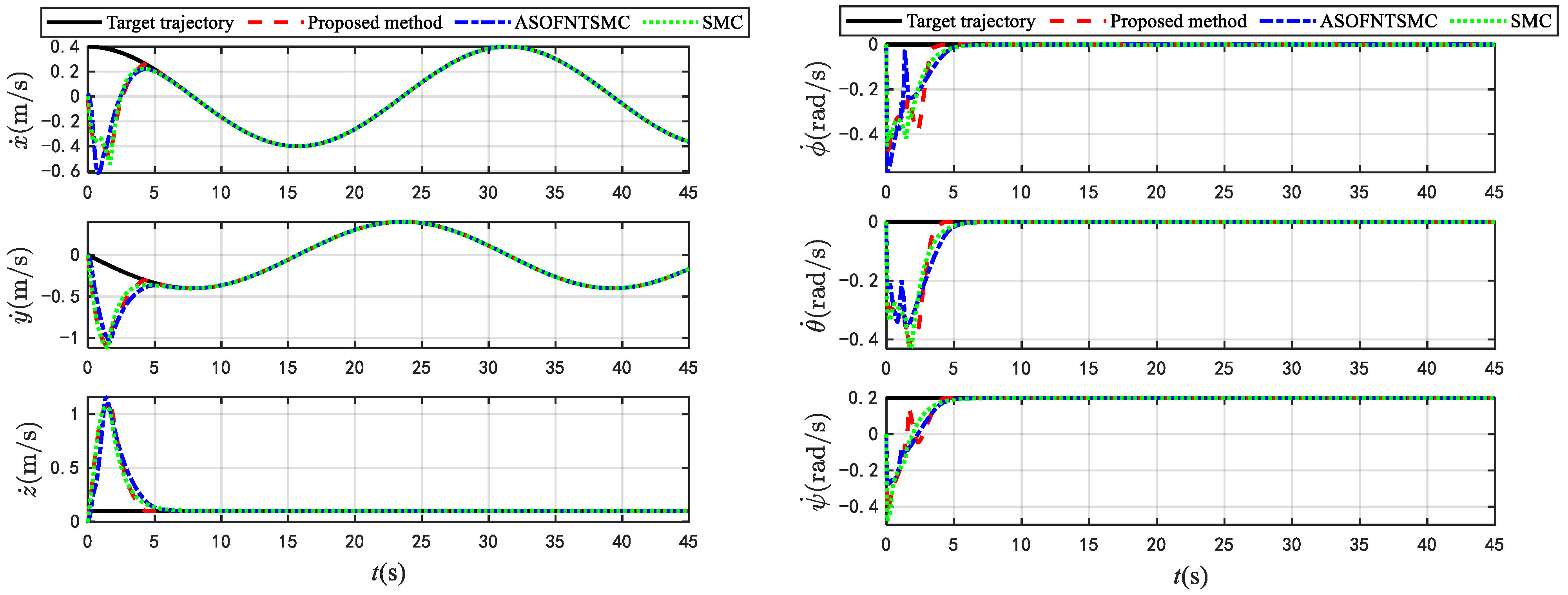
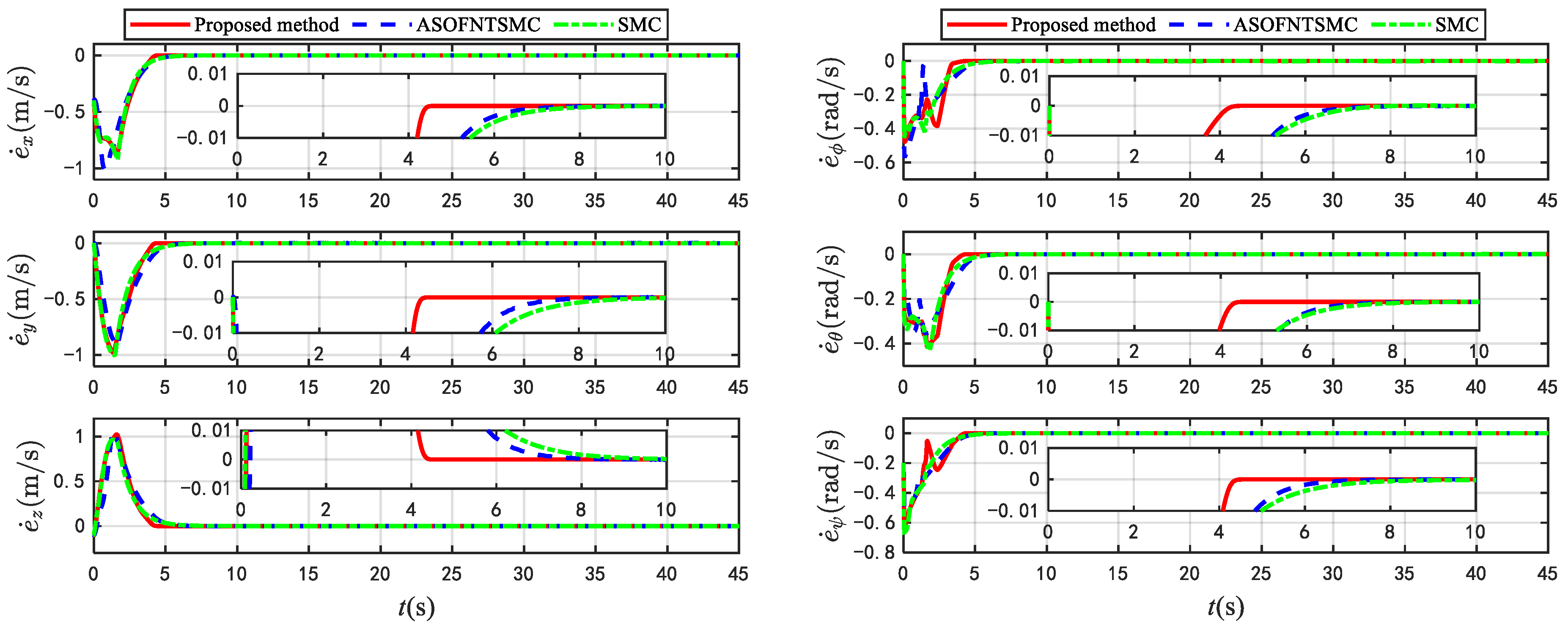
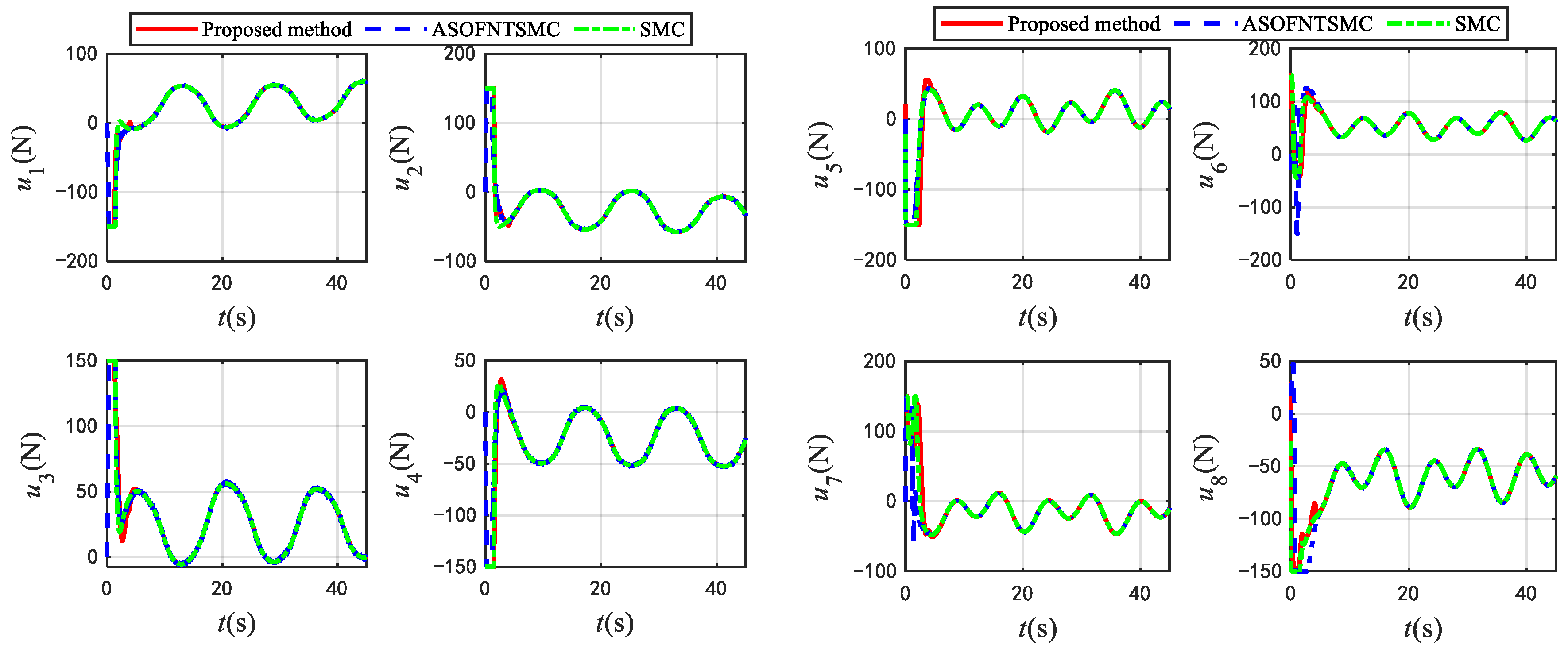
4. Simulation Verification
5. Conclusions
5.1. The Main Work
- (1)
- Parameters are not constrained by the initial conditions;
- (2)
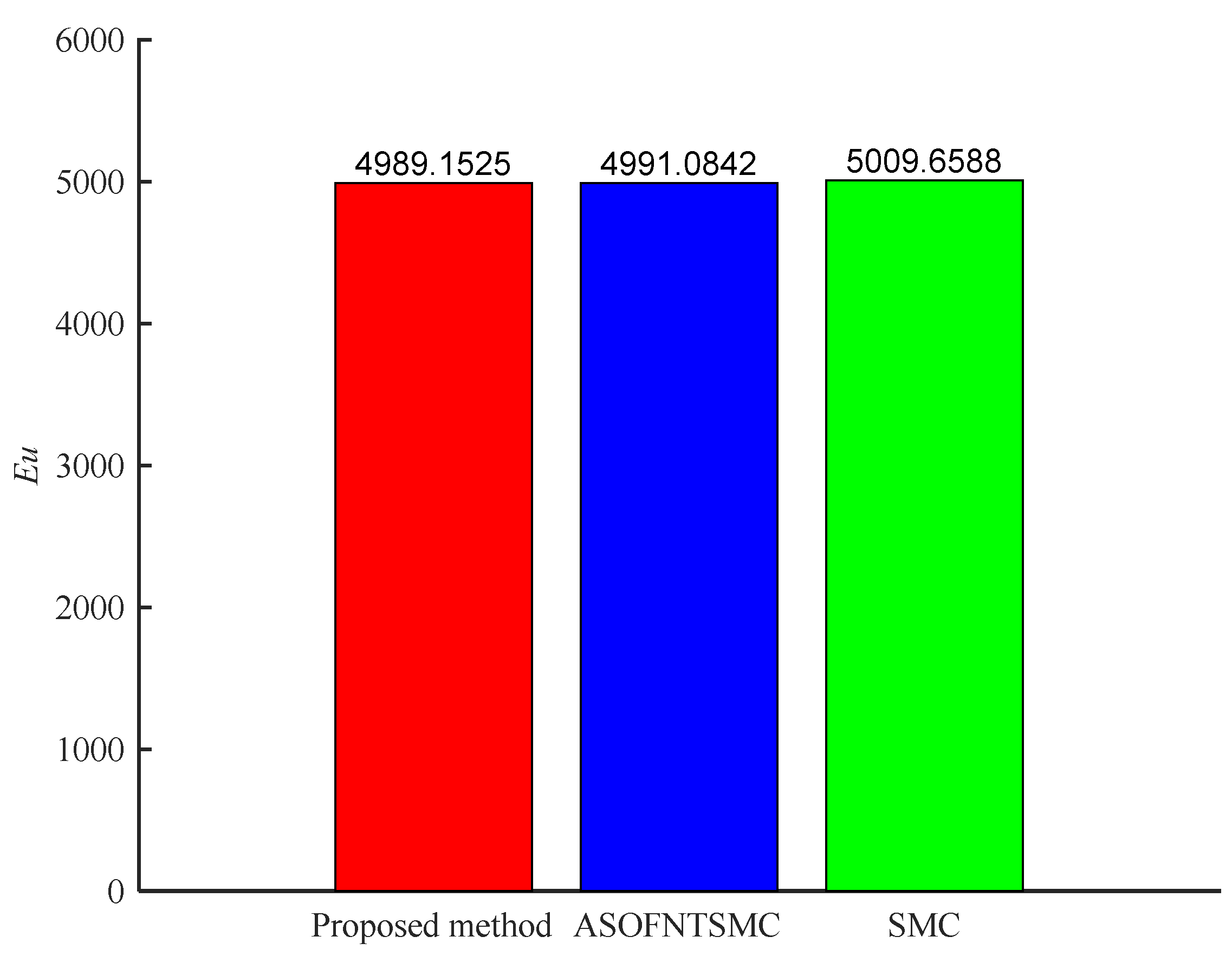
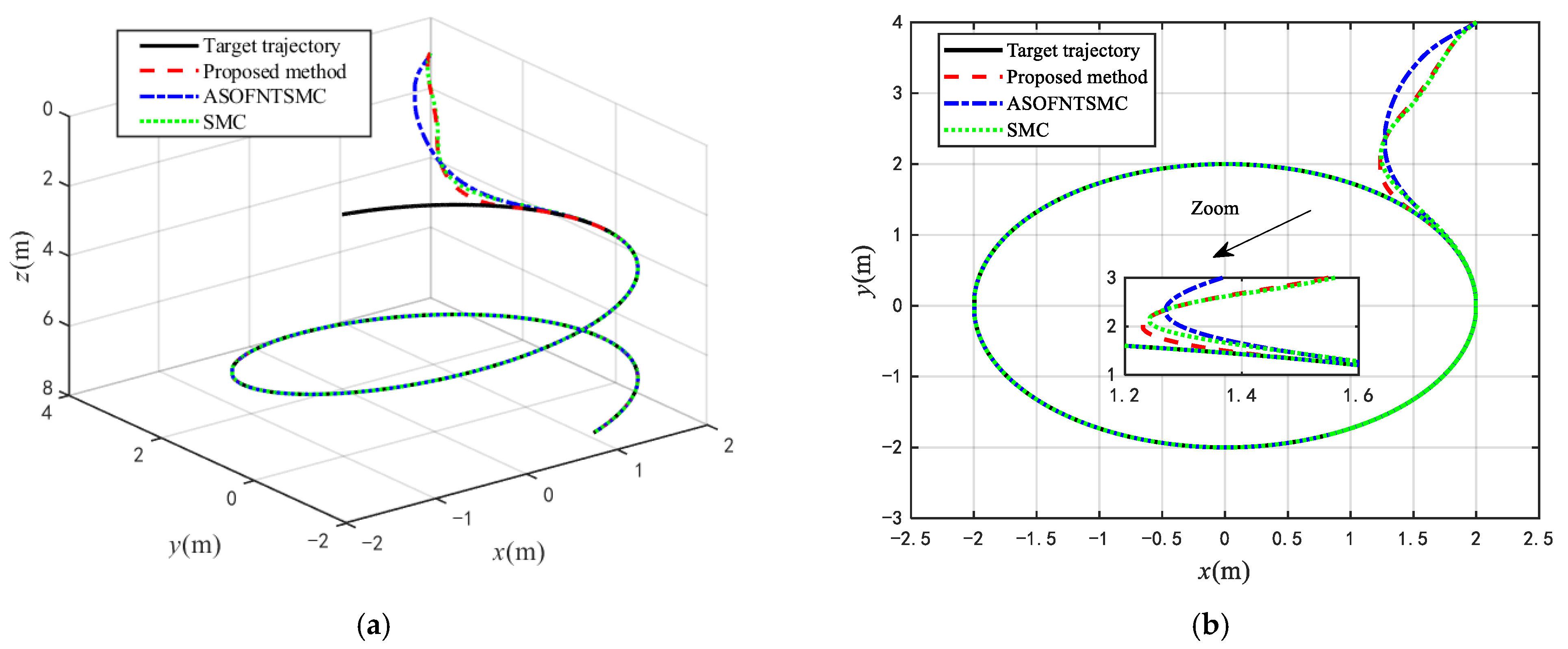
- The developed control approach effectively improves the convergence rate and tracking accuracy of the system without sacrificing a significant amount of energy.
5.2. Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- Step 1. By utilizing the contrapositive method, the Property 1 will be proved.
References
- Hu, X.; Wei, X.; Kao, Y.; Han, J. Robust Synchronization for Under-Actuated Vessels Based on Disturbance Observer. IEEE Trans. Intell. Transp. Syst. 2022, 23, 5470–5479. [Google Scholar] [CrossRef]
- Hu, X.; Zhu, G.; Ma, Y.; Li, Z.; Malekian, R.; Sotelo, M.A. Dynamic Event-Triggered Adaptive Formation with Disturbance Rejection for Marine Vehicles Under Unknown Model Dynamics. IEEE Trans. Veh. Technol. 2023, 72, 5664–5676. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Wang, J. Constrained Control of Autonomous Underwater Vehicles Based on Command Optimization and Disturbance Estimation. IEEE Trans. Ind. Electron. 2019, 66, 3627–3635. [Google Scholar] [CrossRef]
- Liang, X.; Li, Y.; Peng, Z.; Zhang, J. Nonlinear dynamics modeling and performance prediction for underactuated AUV with fins. Nonlinear Dyn. 2016, 84, 237–249. [Google Scholar] [CrossRef]
- Yan, Z.; Yu, H.; Hou, S. Diving control of underactuated unmanned undersea vehicle using integral-fast terminal sliding mode control. J. Cent. South Univ. 2016, 23, 1085–1094. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K. A robust neural network approximation-based prescribed performance output-feedback controller for autonomous underwater vehicles with actuators saturation. Engineering Applications of Artificial Intelligence 2020, 88. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes in Control and Optimization; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Yang, Y.C.; Yang, K.S.; Chen, C.Y.; Mu, L.J.; Yang, W.C. Robust trajectory control for an autonomous underwater vehicle. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–14 June 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Jiang, Y.; Guo, C.; Yu, H. Robust trajectory tracking control for an underactuated autonomous underwater vehicle based on bioinspired neurodynamics. International Journal of Advanced Robotic Systems 2018, 15. [Google Scholar] [CrossRef]
- Karkoub, M.; Wu, H.M.; Hwang, C.L. Nonlinear trajectory-tracking control of an autonomous underwater vehicle. Ocean Eng. 2017, 145, 188–198. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Robust adaptive sliding mode control of underactuated autonomous underwater vehicles with uncertain dynamics. Ocean Eng. 2019, 173, 802–809. [Google Scholar] [CrossRef]
- Cristi, R.; Papoulias, F.A. Adaptive Sliding Mode Control of Autonomous Underwater Vehicles in the Dive Plane. IEEE J. Ocean. Eng. 1990, 15, 152–160. [Google Scholar] [CrossRef]
- Lee, D.; Kim, H.J.; Sastry, S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter. Int. J. Control Autom. Syst. 2009, 7, 419–428. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles. Ocean Eng. 2017, 129, 613–625. [Google Scholar] [CrossRef]
- Zhihong, M.; Yu, X.H. Terminal sliding mode control of MIMO linear systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 44, 1065–1070. [Google Scholar] [CrossRef]
- Yu, X.; Feng, Y.; Man, Z. Terminal sliding mode control—An overview. IEEE Open J. Ind. Electron. Soc. 2020, 2, 36–52. [Google Scholar] [CrossRef]
- Tang, Y. Terminal sliding mode control for rigid robots. Automatica 1998, 34, 51–56. [Google Scholar] [CrossRef]
- Mobayen, S. An adaptive fast terminal sliding mode control combined with global sliding mode scheme for tracking control of uncertain nonlinear third-order systems. Nonlinear Dyn. 2015, 82, 599–610. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Rangel, M.A.G.; Manzanilla, A.; Suarez, A.E.Z.; Muoz, F.; Lozano, R. Adaptive Non-singular Terminal Sliding Mode Control for an Unmanned Underwater Vehicle: Real-time Experiments. Int. J. Control Autom. Syst. 2020, 18, 615–628. [Google Scholar] [CrossRef]
- Komurcugil, H. Non-singular terminal sliding-mode control of DC–DC buck converters. Control Eng. Pract. 2013, 21, 321–332. [Google Scholar] [CrossRef]
- Truong, T.N.; Vo, A.T.; Kang, H.-J. A backstepping global fast terminal sliding mode control for trajectory tracking control of industrial robotic manipulators. IEEE Access 2021, 9, 31921–31931. [Google Scholar] [CrossRef]
- Yu, X.; Zhihong, M. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2009, 49, 261–264. [Google Scholar]
- Boukattaya, M.; Mezghani, N.; Damak, T. Adaptive nonsingular fast terminal sliding-mode control for the tracking problem of uncertain dynamical systems. ISA Trans. 2018, 77, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, K.; Chen, B.; Jin, M. Model-free continuous nonsingular fast terminal sliding mode control for cable-driven manipulators. ISA Trans. 2020, 98, 483–495. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, L.; Ji, W. Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives. IEEE Trans. Transp. Electrif. 2021, 7, 2753–2762. [Google Scholar] [CrossRef]
- Song, Z.; Sun, K. Prescribed performance tracking control for a class of nonlinear system considering input and state constraints. ISA Trans. 2022, 119, 81–92. [Google Scholar] [CrossRef]
- Song, Z.; Liu, J.; Sun, K. Performance-guaranteed fault tolerant control for Euler-Lagrange systems with actuator faults and uncertain disturbance. Proc. Inst. Mech. Eng. Part I-J. Syst. Control. Eng. 09596518251322239. [CrossRef]
- Song, Z.; Sun, K. Adaptive fault tolerant control for a small coaxial rotor unmanned aerial vehicles with partial loss of actuator effectiveness. Aerospace Science and Technology 2019, 88, 362–379. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Sun, Y.; Lewis, F.L. Robust adaptive trajectory tracking control of underactuated autonomous underwater vehicles with prescribed performance. Int. J. Robust Nonlinear Control. 2019, 29, 4629–4643. [Google Scholar] [CrossRef]
- Sun, H.; Zong, G.; Cui, J.; Shi, K. Fixed-time sliding mode output feedback tracking control for autonomous underwater vehicle with prescribed performance constraint. Ocean Eng. 2022, 247, 110673. [Google Scholar] [CrossRef]
- Rong, S.; Wang, H.; Li, H.; Sun, W.; Gu, Q.; Lei, J. Performance-guaranteed fractional-order sliding mode control for underactuated autonomous underwater vehicle trajectory tracking with a disturbance observer. Ocean Eng. 2022, 263, 112330. [Google Scholar] [CrossRef]
- Wang, H.; Bai, W.; Zhao, X.; Liu, P.X. Finite-time-prescribed performance-based adaptive fuzzy control for strict-feedback nonlinear systems with dynamic uncertainty and actuator faults. IEEE Trans. Cybern. 2021, 52, 6959–6971. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Du, J.; Chen, C.P. Command-filtered robust adaptive NN control with the prescribed performance for the 3-D trajectory tracking of underactuated AUVs. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6545–6557. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Zhu, S.; Yu, W.; Song, L.; Guan, X. Adaptive prescribed performance control of nonlinear asymmetric input saturated systems with application to AUVs. J. Frankl. Inst. 2021, 358, 8330–8355. [Google Scholar] [CrossRef]
- Zhou, S.; Song, Y.; Luo, X. Fault-tolerant tracking control with guaranteed performance for nonlinearly parameterized systems under uncertain initial conditions. J. Frankl. Inst. 2020, 357, 6805–6823. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Liu, H.; Qi, Z.; Yuan, J.; Tian, X. Robust fixed-time H∞ tracking control of UUVs with partial and full state constraints and prescribed performance under input saturation. Ocean Eng. 2023, 283, 115023. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, X.; Yin, B.; Liu, W. Adaptive terminal sliding mode based thruster fault tolerant control for underwater vehicle in time-varying ocean currents. J. Frankl. Inst. 2015, 352, 4935–4961. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Adaptive second-order fast nonsingular terminal sliding mode tracking control for fully actuated autonomous underwater vehicles. IEEE J. Ocean. Eng. 2018, 44, 363–385. [Google Scholar] [CrossRef]
- Wan, L.; Cao, Y.; Sun, Y.; Qin, H. Fault-tolerant trajectory tracking control for unmanned surface vehicle with actuator faults based on a fast fixed-time system. ISA Trans. 2022, 130, 79–91. [Google Scholar] [CrossRef]
- An, S.; Wang, L.; He, Y. Robust fixed-time tracking control for underactuated AUVs based on fixed-time disturbance observer. Ocean Eng. 2022, 266, 112567. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Hu, Q.; Li, B.; Qi, J. Disturbance observer based finite-time attitude control for rigid spacecraft under input saturation. Aerosp. Sci. Technol. 2014, 39, 13–21. [Google Scholar] [CrossRef]
- Zhou, S.; Wang, X.; Song, Y. Prescribed performance tracking control under uncertain initial conditions: A neuroadaptive output feedback approach. IEEE Trans. Cybern. 2022, 53, 7213–7223. [Google Scholar] [CrossRef]
- Song, Z.; Sun, K. Prescribed performance adaptive control for an uncertain robotic manipulator with input compensation updating law. J. Frankl. Inst. 2021, 358, 8396–8418. [Google Scholar] [CrossRef]
- Zhu, Y.; Qiao, J.; Guo, L. Adaptive sliding mode disturbance observer-based composite control with prescribed performance of space manipulators for target capturing. IEEE Trans. Ind. Electron. 2018, 66, 1973–1983. [Google Scholar] [CrossRef]
- Li, J.; Du, J. Adaptive disturbance cancellation for a class of MIMO nonlinear Euler–Lagrange systems under input saturation. ISA Trans. 2020, 96, 14–23. [Google Scholar] [CrossRef]
- Sun, T.; Cheng, L.; Wang, W.; Pan, Y. Semiglobal exponential control of Euler-Lagrange systems using a sliding-mode disturbance observer. Automatica 2020, 112, 108677. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.; Wang, H.; Xu, F.; Wang, X.; Liang, B. Recursive sliding mode control with adaptive disturbance observer for a linear motor positioner. Mech. Syst. Signal Process. 2021, 146, 107014. [Google Scholar] [CrossRef]
- Edwards, C.; Shtessel, Y.B. Adaptive continuous higher order sliding mode control. Automatica 2016, 65, 183–190. [Google Scholar] [CrossRef]
- Chen, W.H.; Ballance, D.J. A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 2000, 47, 932–938. [Google Scholar] [CrossRef]
- Nguyen, Q.D.; Huang, S.-C.; Giap, V.N. Lyapunov-based fractional order of disturbance observer and sliding mode control for a secure communication of chaos-based system. Int. J. Control Autom. Syst. 2023, 21, 3595–3606. [Google Scholar] [CrossRef]
- Giap, V.N.; Nguyen, Q.D.; Trung, N.K.; Huang, S.-C. Time-varying disturbance observer based on sliding-mode observer and double phases fixed-time sliding mode control for a TS fuzzy micro-electro-mechanical system gyroscope. J. Vib. Control 2023, 29, 1927–1942. [Google Scholar] [CrossRef]
- Hwang, S.; Kim, H.S. Extended Disturbance Observer-Based Integral Sliding Mode Control for Nonlinear System via T-S Fuzzy Model. IEEE Access 2020, 8, 116090–116105. [Google Scholar] [CrossRef]
- Kumar, T.R.D.; Mija, S.J. Boundary Logic-Based Hybrid PID-SMC Scheme for a Class of Underactuated Nonlinear Systems-Design and Real-Time Testing. IEEE Trans. Ind. Electron. 2025, 72, 5257–5267. [Google Scholar] [CrossRef]
- Pal, P.; Behera, R.K.; Muduli, U.R. Eliminating Current Sensor Dependencies in DAB Converters Using a Luenberger Observer-Based Hybrid Approach. IEEE Trans. Ind. Appl. 2024, 60, 6380–6392. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, Z.; Yuan, X.; Wang, Y.; Shen, X. L2-Gain Adaptive Robust Control for Hybrid Energy Storage System in Electric Vehicles. IEEE Trans. Power Electron. 2021, 36, 7319–7332. [Google Scholar] [CrossRef]
- Karahan, O.; Karci, H. Design of robust fractional order fuzzy PID sliding mode controller based on hybrid swarm intelligence algorithm for a 6-DOF robotic manipulator. Robotica 2025, 43, 1110–1139. [Google Scholar] [CrossRef]
- Ma, Y.; He, L.; Song, T.; Wang, D. Adaptive path-tracking control with passivity-based observer by port-Hamiltonian model for autonomous vehicles. IEEE Trans. Intell. Veh. 2023, 8, 4120–4130. [Google Scholar] [CrossRef]
- Chabukswar, A.; Wandhare, R. Modified Back-Stepping Sliding Mode Controller with Robust Observer-Less Disturbance Rejection for DC Microgrid Applications. IEEE Trans. Power Electron. 2025, 40, 451–466. [Google Scholar] [CrossRef]
- Fu, B.; Che, W.; Wang, Q.; Liu, Y.; Yu, H. Improved sliding-mode control for a class of disturbed systems based on a disturbance observer. J. Frankl. Inst. 2024, 361, 106699. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, X.; Zong, G.; Wang, W. Kalman filter-based SMC for systems with noise and disturbances: Applications to magnetic levitation system. Int. J. Syst. Sci. 2025. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Adaptive non-singular integral terminal sliding mode tracking control for autonomous underwater vehicles. IET Control Theory Appl. 2017, 11, 1293–1306. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Hu, X. Robust adaptive prescribed performance control for dynamic positioning of ships under unknown disturbances and input constraints. Ocean Eng. 2020, 206, 107254. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Symbol | Definition |
|---|---|---|---|
| Positions of AUV | unknown inertia matrix perturbation vector | ||
| attitudes of AUV | nominal input force and moment vector | ||
| linear velocities | nominal terms | ||
| angular velocities | uncertainty terms | ||
| corresponding nominal terms | |||
| inertia matrix | corresponding uncertainty terms | ||
| Coriolis force and centripetal force matrices | corresponding external perturbation term | ||
| linear and quadratic damping matrix | corresponding input term | ||
| related force vector | target reference command |
| Control Scheme | Parameter |
|---|---|
| SMC | |
| ASOFNTSMC | |
| Proposed method |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Gao, Z.; Hu, Y.; Song, Z. Predefined-Performance Sliding-Mode Tracking Control of Uncertain AUVs via Adaptive Disturbance Observer. J. Mar. Sci. Eng. 2025, 13, 1252. https://doi.org/10.3390/jmse13071252
Guo Y, Gao Z, Hu Y, Song Z. Predefined-Performance Sliding-Mode Tracking Control of Uncertain AUVs via Adaptive Disturbance Observer. Journal of Marine Science and Engineering. 2025; 13(7):1252. https://doi.org/10.3390/jmse13071252
Chicago/Turabian StyleGuo, Yuhang, Zijun Gao, Yuhang Hu, and Zhankui Song. 2025. "Predefined-Performance Sliding-Mode Tracking Control of Uncertain AUVs via Adaptive Disturbance Observer" Journal of Marine Science and Engineering 13, no. 7: 1252. https://doi.org/10.3390/jmse13071252
APA StyleGuo, Y., Gao, Z., Hu, Y., & Song, Z. (2025). Predefined-Performance Sliding-Mode Tracking Control of Uncertain AUVs via Adaptive Disturbance Observer. Journal of Marine Science and Engineering, 13(7), 1252. https://doi.org/10.3390/jmse13071252