1. Introduction
Global aquaculture faces the dual challenges of meeting escalating production demands while ensuring environmental sustainability, with FAO reports indicating record-breaking production levels [
1]. The urgent need for technological transformation in aquaculture has become increasingly apparent as traditional farming methods struggle to meet the growing global food security demands while maintaining environmental responsibility. Naylor et al. (2021) emphasized in their comprehensive review in
Nature that sustainable development necessitates precise management approaches [
2]. Boyd et al. (2020) analyzed the historical context and future challenges of sustainable aquaculture [
3], while Costello et al. (2016) highlighted the limitations of traditional farming methods in terms of management efficiency [
4]. This pressing need for enhanced monitoring and control capabilities in aquaculture operations drives the fundamental motivation for developing integrated technological solutions that can bridge the gap between traditional practices and modern precision farming requirements.
The conceptual framework of precision aquaculture has emerged from a multidisciplinary integration of various fields. O’Donncha and Grant (2019) were the first to systematically define precision aquaculture in IEEE Internet of Things Magazine [
5]. Føre et al. (2018) developed an integrated framework for precision fish farming, published in
Biosystems Engineering [
6]. Antonucci and Costa (2020) provided a critical review of engineering innovations within the field [
7]. Beveridge et al. (2013) analyzed the role of fish in addressing nutritional needs [
8], while Garlock et al. (2020) conducted a regional analysis of global aquaculture growth [
9]. Lester et al. (2018) examined the opportunities and challenges associated with offshore aquaculture [
10]. Zhou et al. (2018) published a comprehensive review of intelligent feeding control methods in
Reviews in Aquaculture [
11] and Bao et al. (2020) contributed research on integrated navigation for autonomous underwater vehicles [
12].
In the development of sensor technology, Parra et al. (2018) created low-cost sensor systems for monitoring water quality and fish behavior [
13]. Additionally, García-Magariño et al. (2017) developed agent-based simulation systems for underwater sensors [
14]. Betancourt et al. (2020) developed an integrated ROV solution for underwater net-cage inspection in fish farms using computer vision, which showcases a specialized remotely operated vehicle (ROV) design for aquaculture applications, although it is limited by traditional communication methods [
15]. Foundational research includes Akyildiz et al.’s (2005) pioneering work on underwater acoustic sensor networks, which identified fundamental challenges in underwater communication [
16]. Shi et al. (2016) established concepts of edge computing, providing theoretical foundations for distributed processing [
17]. Xiang et al. (2022) demonstrated advanced identification and quantification techniques for environmental monitoring in aquaculture systems, contributing to the understanding of environmental challenges in marine farming [
18].
The critical motivation for this research stems from four significant gaps identified through a systematic analysis of the existing literature that collectively highlight the urgent need for comprehensive technological integration in aquaculture monitoring. Current research primarily focuses on individual technological components [
13,
14,
15,
16,
17,
18], lacking a cohesive integration design that encompasses ROV hardware, communication technologies, control interfaces, and cloud services. Most studies remain confined to controlled environments and lack validation from long-term deployments in actual marine aquaculture settings [
13]. The absence of multi-platform control capabilities in existing solutions limits operational flexibility and accessibility, particularly for resource-constrained aquaculture operators. Furthermore, the lack of scalable communication architectures that can adapt to future technological advances, such as Beyond 5G networks, represents a significant limitation for long-term industry adoption.
Based on the identified research gaps and the compelling need for technological advancement in aquaculture, this study aimed to develop an integrated smart ocean aquaculture monitoring system with four primary innovative contributions. First, it integrated self-developed remotely operated vehicles (ROVs), 4G mobile communication, multi-platform control interfaces, and cloud services to address existing deficiencies in autonomous control and monitoring system integration [
19]. Second, it established communication architectures that are upgradeable to Beyond 5G/Non-Terrestrial Network (NTN) technologies, ensuring long-term technical compatibility [
20,
21]. Third, it developed integrated control systems that encompass computers, smartphones, smartwatches, and multi-site control centers to enhance operational flexibility. Fourth, it achieved a good balance between technological advancement and economic feasibility through self-development and modular design approaches, specifically targeting resource-limited regions as emphasized by Troell et al. [
22]. This study used interdisciplinary approaches and multi-site field studies to validate the comprehensive solution across diverse aquaculture environments.
2. Materials and Methods
2.1. Overall System Architecture
The smart ocean aquaculture monitoring system proposed in this research is a highly integrated platform that utilizes multiple remote control systems and mobile communication technologies as its core components. This system facilitates the refined management and real-time monitoring of aquaculture sites (
Figure 1). The overall system architecture comprises an underwater ROV, a 4G mobile communication network module, and several remote control systems. The design focus of the system is to empower aquaculture operators to perform remote control through various devices while leveraging mobile communication technology to ensure stable and reliable data transmission. This design maintains robust connectivity even in aquaculture environments that are far from land. Each component has clearly defined responsibilities and works collaboratively, ensuring that the system operates efficiently and stably across diverse aquaculture environments.
The hardware implementation employs a modular design approach, comprising two primary modules: the underwater ROV and the buoy system. The buoy system functions as a communication relay station, linking the ROV with land-based control systems. To optimize resource management, the system architecture is designed to minimize the weight of the ROV while enhancing its mobility. It transmits information and control signals through composite cables, significantly simplifying connection complexity. The system works in different aquaculture settings: offshore cage nets, oyster farms, land-based fish ponds, and similar environments. By utilizing an integrated solution, it not only enables real-time water quality monitoring but also facilitates the periodic inspection and maintenance of underwater equipment, significantly enhancing the management efficiency and productivity of the aquaculture environment.
2.2. Cloud and Software Architecture
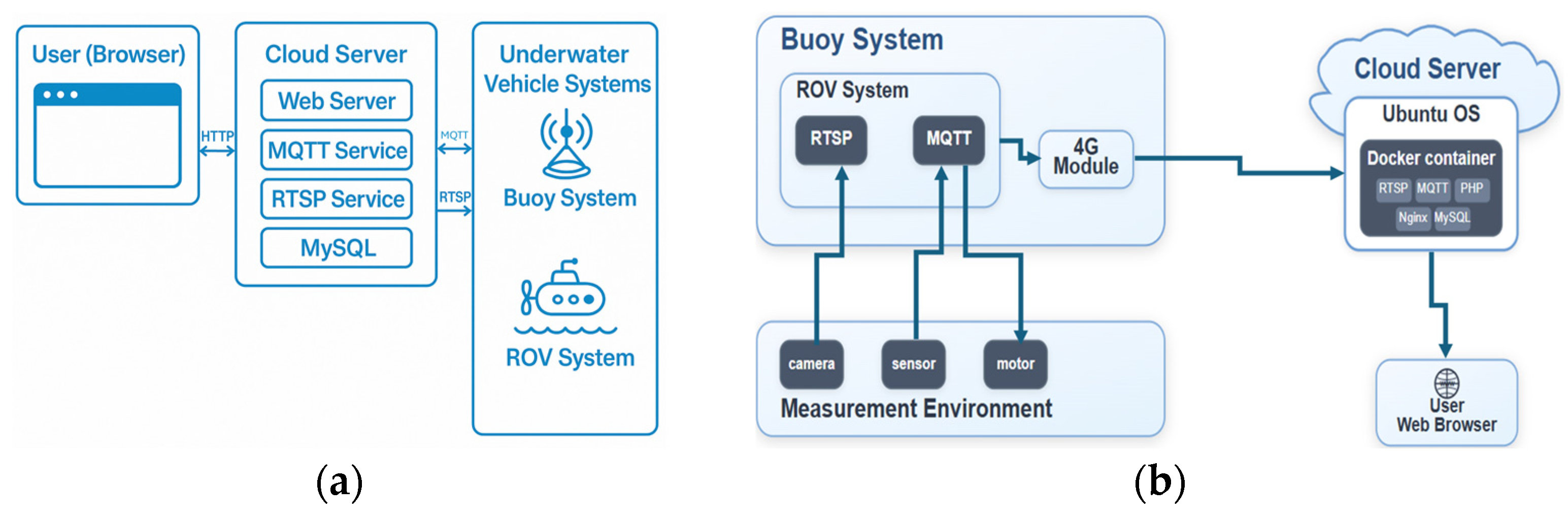
The cloud and software architecture proposed in this research (
Figure 2) integrates three core components: the client interface, cloud server platform, and underwater ROV system. This architectural design facilitates the smooth integration of various remote control and mobile communication technologies, ensuring seamless communication between different control platforms and the underwater ROV system. The RTSP service integrates H.264 encoding technology to provide high-quality 1080p video transmission at 2–4 Mbps transmission rates, with adaptive capabilities that automatically adjust to different network conditions. The system operates normally under different bandwidth environments, from 1 Mbps 480p resolution 15 fps basic requirements to 4 Mbps 1080p 30 fps. The smart aquaculture monitoring system incorporates cloud security measures aimed at preventing cyber threats and ensuring data integrity across all communication channels. The system protects network traffic through TLS1.3 encryption protocols, maintaining secure data transmission between system components.
2.3. Multiple Remote Control System Architecture
The multiple remote control system is compatible with a variety of terminal devices, enabling users to operate computers, smartphones, smartwatches, and multi-site central control centers, as well as any devices with web browsing capabilities. Through these devices, users can access web services on the cloud server, view real-time underwater environmental sensing data, and perform remote operations of the underwater ROV. To achieve multi-platform remote operation, this research developed a web-based control interface called the Smart-Fish Control System. This interface serves as the core component of the multi-remote control system, deployed on a cloud server and accessible via web browsers on computers, smartphones, and smartwatches. The control interface displays real-time video from the underwater ROV, along with real-time sensor readings, such as temperature and pH levels. Users can send control commands to the underwater ROV through this interface, allowing them to manipulate its movement direction, among other functions.
Communication between the user interface and the underwater ROV utilizes a publish/subscribe model based on the MQTT (Message Queuing Telemetry Transport) protocol. In this system, the cloud server operates as an MQTT message broker. The Smart-Fish Control System functions as an MQTT client, publishing relevant control messages—targeting various control topics, such as movement commands—to the broker when users interact with the interface. The Raspberry Pi (Raspberry Pi Foundation, Cambridge, UK) on the buoy also acts as an MQTT client, subscribing to these control topics. When the user interface publishes a control command (such as forward) to the MQTT broker, the message is promptly transmitted to the Raspberry Pi on the buoy. This publish/subscribe architectural design is both lightweight and reliable, ensuring command delivery even in situations where mobile communication networks may occasionally experience delays. The system supports a variety of control devices, enabling truly diverse remote control options:
Smartphones and Tablets: Users can access the Smart-Fish Control System via web browsers on smartphones or tablets, allowing for the comprehensive control and monitoring of underwater ROV. The touch interface of mobile devices is optimized to ensure intuitive and precise operation, making it particularly suitable for outdoor environments at aquaculture farms.
Smartwatches: A specialized, simplified control interface was developed for smartwatches, enabling users to send straightforward commands (such as instructing the underwater ROV to surface). This feature offers aquaculture operators an exceptionally convenient emergency control option.
Multi-Site Central Control Center: Professional monitoring stations established at aquaculture headquarters or research institutions, equipped with large display screens, can simultaneously oversee multiple underwater ROV systems and data from aquaculture areas, providing a comprehensive monitoring perspective.
Figure 3 shows the central control room setup at National Taiwan Ocean University, demonstrating both operator monitoring via multi-screen stations and collaborative real-time data analysis. The system design enables the simultaneous monitoring and management of multiple aquaculture farms across different regions from the central control center, significantly enhancing management efficiency and response capabilities.
2.4. Cloud Server Architecture
The cloud server features a modular design that integrates four core functions:
Web Server: Responsible for handling HTTP requests from multiple user devices and providing a unified user interface. The system allows users to log in through various platform browsers to view real-time monitoring data, watch underwater video streams, and send remote control commands.
Figure 4 shows the system control interface that integrates these comprehensive monitoring and control capabilities.
MQTT Service v2.0: This service utilizes the lightweight MQTT communication protocol, which is responsible for bidirectional data transmission. It manages the transmission of motor status control commands for the underwater ROV while also receiving and distributing water quality sensor data from the ROV system. The MQTT protocol is particularly well-suited for mobile communication environments as it can maintain reliable connections even under limited bandwidth and unstable network conditions. This ensures the accurate delivery of control commands and timely updates of sensing data. By leveraging MQTT’s publish/subscribe mechanism, the system achieves precise control of the underwater ROV and the synchronized monitoring of environmental parameters.
RTSP Service: This service is responsible for real-time underwater video streaming, ensuring the timeliness and stability of image data. The system integrates FFmpeg technology v4.4 for video conversion and compression, optimizing transmission efficiency. It is capable of maintaining image transmission in 4G mobile communication network environments.
MySQL Database: Provides long-term storage and management functions for sensor data and the operational status of underwater ROV systems.
2.5. Design of the Underwater Monitoring System
The underwater monitoring system is divided into two components. The Buoy System and the Underwater ROV System. This system functions as a communication relay node, establishing connections with the cloud server via 4G mobile communication networks. Its primary functions include the following:
Receiving and processing real-time MQTT control commands from the cloud server and forwarding them to the underwater ROV system.
Integrating RTSP video streams and MQTT sensor data from the underwater ROV system and forwarding them to the cloud server.
Collecting local water quality sensor data and transmitting it to the cloud server using the MQTT protocol.
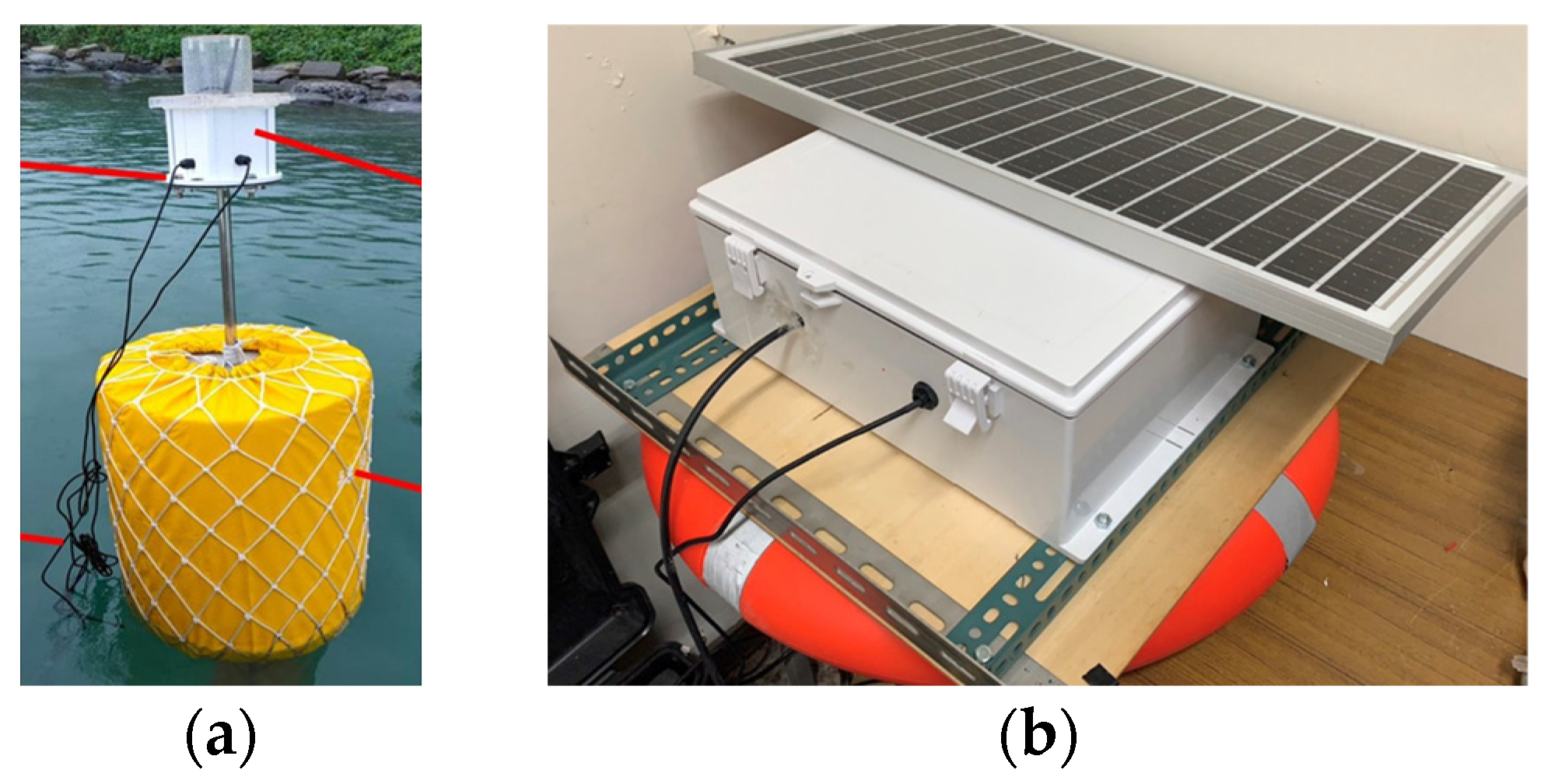
Figure 5 illustrates the communication system components, showing both the deployed buoy system and the ROV communication module configuration. The underwater ROV system communicates with the buoy system via wired connections, with primary functions including the following:
2.6. 4G Mobile Communication Network Module
Stable data communication is essential for the real-time transmission of data collected by underwater ROV and other sensing equipment to the central system. In this architecture, the mobile communication module serves as the communication backbone of the multiple remote control system, ensuring that data can be transmitted quickly and reliably. The system employs 4G mobile communication networks for data transmission, leveraging the extensive coverage provided by 4G mobile communication network base stations to facilitate remote operations.
The underwater ROV, along with its connected buoy or shore-based station, is equipped with a 4G mobile communication network data terminal that includes a SIM card for connectivity to land-based 4G base stations. This communication setup enables the real-time uploading of data collected underwater by the ROV, including sensor readings and camera images, to a cloud server or control center. Additionally, it allows for the transmission of control commands from the multiple remote control system to the ROV.
This research focuses on Chunghwa Telecom’s (Taipei, Taiwan) 4G mobile communication network, primarily due to its extensive base station coverage in Taiwan’s coastal regions. Field surveys indicate that Chunghwa Telecom boasts the densest distribution of base stations in Taiwan, with coverage in near-sea areas significantly surpassing that of other telecommunications operators. This characteristic is essential for maintaining stable communication connections in maritime aquaculture farms.
The technical architecture of the communication system includes the following:
4G Mobile Communication Network Module: This module supports multi-frequency band operation, ensuring stable connections across various regions. It provides the essential communication foundation required for multiple remote control applications. Actual measurements in maritime environments indicate that the communication system maintains average download speeds of 5–10 Mbps and upload speeds of 3–8 Mbps, fully meeting the demands of underwater ROV control and data transmission.
High-Gain Antenna: This external high-gain antenna is optimized for long-distance environments, significantly enhancing communication capabilities. It effectively addresses maritime signal attenuation issues, ensuring that commands from multiple control devices can be reliably transmitted to deep-sea areas. Actual deployment tests demonstrate that with high-gain antennas, the system can maintain stable connections in offshore environments up to 2 km from shore.
4G Mobile Communication Hardware Specifications—ASUS 4G-AX56 Router (ASUS Computer Inc., Taipei, Taiwan):
Wireless Standard: IEEE 802.11ax (Wi-Fi 6) [
23]
Maximum Data Rates: 2.4 GHz: 574 Mbps, 5 GHz: 1201 Mbps
LTE Category and Speeds: Cat.6, Maximum Download Speed: 300 Mbps, Maximum Upload Speed: 50 Mbps
Ethernet Ports: 1× Gigabit WAN, 4× Gigabit LAN
The smooth integration of the mobile communication module with the remote control system empowers aquaculture operators to conduct remote monitoring and operations using various devices.
2.7. Underwater ROVs
The underwater ROV developed in this research serves as a system component specifically designed for the integration of various remote control and mobile communication technologies. This self-developed underwater vehicle system incorporates multiple water quality sensors and underwater camera equipment, enabling the precise measurement of environmental parameters such as water temperature, pH level, dissolved oxygen concentration, and other key indicators. Additionally, it provides real-time underwater image transmission capabilities. The hardware architecture features a waterproof housing design that protects internal electronic components from water pressure and corrosion. The main structure is constructed using PVC pipes and adapter fittings, effectively balancing lightweight design with structural strength. The waterproof performance was verified through vacuum testing. The propulsion system incorporates RM-168 brushless motor thrusters paired with 20 A electronic speed controllers (ESCs) with a maximum operating current of approximately 5 A. This system is configured with both horizontal and vertical forward and reverse motors, ensuring full three-dimensional spatial mobility.
Figure 6 shows the prototype of the self-developed underwater ROV with its complete hardware configuration.
The system employs a modular design that facilitates the rapid replacement or expansion of sensing modules based on monitoring requirements, thereby enhancing environmental adaptability. The precise weight distribution design enables the vehicle to achieve stable underwater hovering, effectively reducing energy consumption and improving control flexibility. The processing and computing architecture utilizes a Raspberry Pi 3 B+ (Raspberry Pi Foundation, Cambridge, UK) as the central computing unit, in conjunction with an STM32F103C8T6 (STMicroelectronics, Geneva, Switzerland) to create a dual-processor collaborative framework. The STM32F103C8T6 is dedicated to motor control and the collection of raw sensor data, while the Raspberry Pi manages high-level computing and network communication tasks, including image processing, data acquisition, and remote transmission. This dual-controller design significantly enhances multitasking capabilities, ensuring that the underwater ROV can efficiently execute multiple remote control commands and maintain stable bidirectional data transmission through the mobile communication module.
The power management system of the underwater ROV utilizes a dual-battery configuration to optimize operational efficiency and ensure system reliability. Comprehensive power consumption testing was conducted to evaluate the system’s endurance performance under various operational conditions. The control system employs a 3.7 V/10 Ah (10,000 mAh) lithium battery to power the Raspberry Pi 3 B+ and its associated processing components. Power consumption measurements indicate that the Raspberry Pi maintains an average consumption of 5.1 W during normal operation, providing approximately 7.25 h of continuous operation. This configuration ensures sufficient operational duration for extended monitoring missions while maintaining stable communication and data processing capabilities. The propulsion system is powered by a separate 14.8 V/10.5 Ah (10,500 mAh) battery pack designed to meet the high-current demands of the four-thruster motor configuration. Detailed current consumption testing was performed across different operational modes, with results presented in
Table 2.
The test results revealed significant variations in power consumption based on operational conditions. Maximum current consumption occurred during high-intensity maneuvers in water, with individual motors drawing up to 21.5 A, which limited the operational duration to approximately 0.13 h under peak load conditions. However, during normal underwater operations, the system achieved a balanced power consumption profile, with motors drawing between 3.1 A and 4.24 A, allowing for sustained operation of approximately 0.72 h. This dual-battery architecture ensures operational independence between the control and propulsion systems, preventing power failures in critical communication functions even during intensive maneuvering operations. The power management design supports the system’s multi-platform remote control capabilities while maintaining adequate endurance for practical aquaculture monitoring applications.
2.8. Experimental Design and Progressive Deployment Strategy
To ensure a comprehensive verification of system stability and performance across diverse aquaculture environments, this research adopted a progressive deployment strategy, transitioning gradually from controlled environments to open waters. This methodological approach enabled the systematic validation of the integrated multiple remote control and mobile communication technologies under varying operational conditions. The experimental design comprised five distinct testing phases, each targeting specific environmental conditions and system capabilities, as detailed in
Table 3.
To ensure consistency and reliability throughout all testing phases, the following standardized conditions were maintained: all tests utilized identical ROV hardware configurations and sensor specifications, and a unified data collection frequency and transmission protocol were employed. This progressive deployment methodology ensured comprehensive validation of the system’s capabilities while upholding scientific rigor and reproducibility across diverse aquaculture environments.
3. Results
This research developed and validated a smart ocean aquatic farming surveillance system that integrates multiple remote control and mobile communication technologies. This system significantly enhances the efficiency of aquaculture monitoring and the precision of management through a self-developed underwater ROV. To verify the effectiveness and stability of the system integration architecture, the research team conducted on-site deployment tests in various aquaculture environments, including controlled laboratory settings and open water scenarios. The experiments focused on assessing the collaborative operational performance of multiple remote control systems and 4G mobile communication networks under different environmental conditions. The test sites were approached sequentially, starting from controlled environments and progressing to open waters: initial system validation was conducted in laboratory tanks, followed by integration testing at the Gongliao Aquatic Center’s cage aquaculture. Communication stability was assessed during offshore cage testing at Keelung Harbor, long-distance operational capabilities were verified at large-scale cage nets in Pingtung offshore waters, and, finally, the system’s adaptability was evaluated in shallow water environments at traditional fish ponds in Xuejia, Tainan.
3.1. Initial Laboratory Tank Testing
Geographic Location: Indoor controlled environment, National Taiwan Ocean University biological cultivation building.
Experiment Purpose: To verify fundamental system functions and calibrate motor control parameters prior to field deployment.
Experiment Content: The ROV was placed in a large aquaculture tank with a volume of approximately 1 cubic meter, filled with freshwater and live fish to simulate real aquaculture conditions. The ROV was equipped with sensors to measure temperature, pH, and dissolved oxygen levels, with cross-verification against handheld instruments to ensure accuracy. The communication system transmitted video via 4G mobile networks, allowing the research team to remotely control the ROV from a computer using the Smart-Fish Control System to evaluate data collection capabilities.
The test results indicated that in the initial testing environment, the underwater ROV was able to accurately execute a variety of actions, including motor speed tests, forward and backward movement, left and right turns, and descent and ascent.
In the initial testing phase, the system demonstrated the effectiveness of multiple remote control functions. Researchers successfully operated the ROV using various control terminals, including smartphones, tablets, smartwatches, and multi-site central control centers, with seamless and smooth transitions between platforms.
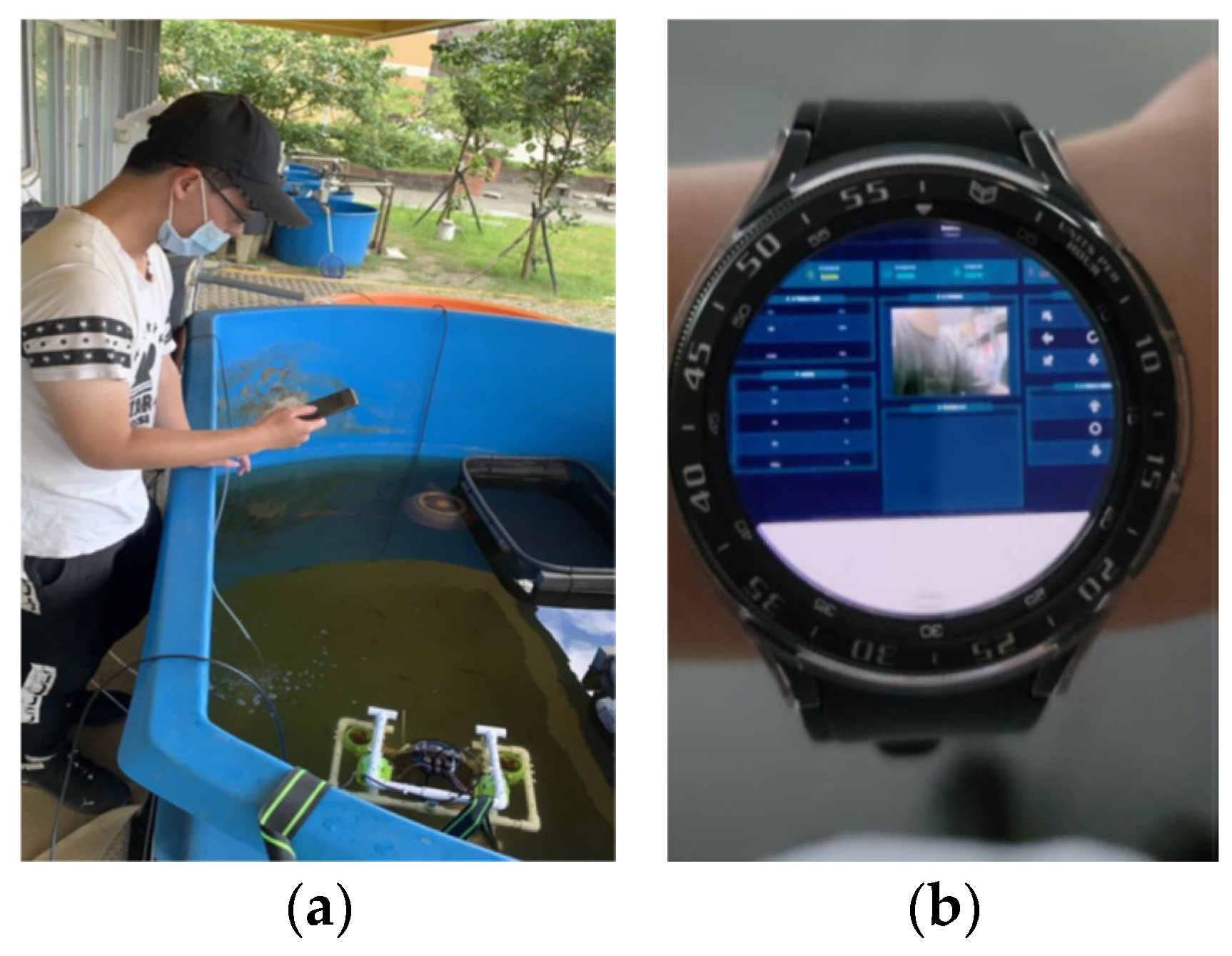
Figure 7 illustrates the smart device-controlled ROV monitoring capabilities, showing both smartphone and smartwatch interfaces used in laboratory and field testing environments. Through the web interface of the Smart-Fish Control System, all control commands were accurately transmitted to the ROV, enabling it to execute actions according to preset motion modes, with control delay times maintained at an average of 1 to 2 s. Notably, this network-based remote control method allowed personnel at the National Taiwan Ocean University control center to obtain and analyze water quality data and fish activity in the aquaculture tank in real-time, significantly enhancing monitoring efficiency.
3.2. Deployment Site–Gongliao Aquatic Center Cage Aquaculture
Geographic Location: Gongliao District, northeastern Taiwan.
Experiment Purpose: To assess the feasibility of cage aquaculture in this region and evaluate the potential application of underwater ROV for smart monitoring.
Experiment Content: The self-constructed underwater ROV, equipped with cameras and sensors, conducted underwater monitoring by recording water quality parameters, such as dissolved oxygen and pH levels, as well as the growth status of cultured organisms. The integration of various remote control technologies enabled users to operate the ROV in real-time and acquire data through multiple platforms, including computers and mobile devices.
In the cage tests conducted at the Gongliao Aquatic Center, various remote control technologies demonstrated excellent adaptability. The research team utilized different control platforms—computers, tablets, and smartphones—to operate the underwater ROV, transmitting control commands to the site through 4G mobile communication networks.
Figure 8 demonstrates the smartphone-based operations in cage net aquaculture, showing the practical implementation of mobile control capabilities. Test results indicated that in near-shore environments, the signal coverage of the 4G mobile communication network was robust, enabling smooth real-time image transmission. Additionally, sensor data—including temperature, dissolved oxygen, and pH levels—transmitted via the MQTT protocol could be reliably returned to the database, allowing the remote monitoring system to display and analyze changes in the cage environment in real-time.
Water quality monitoring data indicated that the ROV camera could effectively display the condition of the cage structure. It was particularly adept at detecting sediment accumulation at the bottom of the cage and identifying potential damage areas on the net surface. This technology offers comprehensive monitoring capabilities that are not attainable through traditional manual inspections.
3.3. Long-Term Communication System Performance Evaluation
To comprehensively assess the reliability and stability of the integrated communication system, an extended field study was conducted at the Gongliao Aquatic Center from December 24 to January 10. This long-term deployment provided valuable insights into the system’s performance under varying environmental conditions and operational scenarios. During the 18-day testing period, the system collected and analyzed a total of 324,800 data transmission events.
Real-time Performance: About 63% of sensor data and control commands reached the cloud server within 1 s, demonstrating the system’s capability for near-real-time monitoring and control operations.
Overall System Reliability: 95.60% of all data transmissions were successfully completed within 2 s, indicating excellent overall system reliability even under varying 4G network conditions in the coastal aquaculture environment.
Sustained Operational Efficiency: The system achieved an average transmission rate of 15 data points per minute, with a success rate of 83.54%. This confirmed the system’s suitability for continuous long-term monitoring applications.
These results demonstrate that the integrated 4G mobile communication system provides stable data transmission capabilities essential for smart aquaculture monitoring. The high success rate indicates that the system can reliably maintain communication links between the underwater ROV, buoy relay station, and cloud server infrastructure. The performance metrics obtained from this extensive field study provide essential validation data for the practical deployment of the multi-platform remote control system, confirming its readiness for operational use in commercial aquaculture settings. To address potential scenarios of telemetry communication loss and ensure operational continuity, the system incorporates robust data protection and recovery mechanisms. The underwater ROV and buoy relay station are equipped with local buffering capabilities for both sensor data and video information. This ensures that critical monitoring data is preserved during communication interruptions and automatically transmitted once connectivity is restored.
3.4. Deployment Site–Keelung Harbor Offshore Cage
Geographic Location: Offshore of Keelung Harbor, Northern Taiwan.
Experiment Purpose: To investigate the effects of cage aquaculture technology in marine environments and analyze the associated environmental challenges.
Experiment Content: The ROV monitored environmental parameters, such as temperature and salinity, while assessing the stability of the cage structure.
Figure 9 shows the installation of cage nets in the open sea environment off Keelung Harbor, representing the challenging offshore testing conditions. The integration of multiple remote control technologies enabled operators to adjust the ROV’s path in real-time, allowing for adaptation to dynamic changes in the marine environment.
The Keelung offshore test showcased the system’s performance in more challenging environments. Operators were able to select the most suitable control interface based on the prevailing communication conditions. The system successfully transmitted critical environmental parameters, such as temperature and salinity, in real-time, enabling operators to adjust monitoring strategies immediately based on this data. These results demonstrated the system’s reliability and flexibility in offshore environments.
3.5. Deployment Site—Large-Scale Cage Net in Pingtung Offshore Waters
The deployment of large-scale cage nets in the offshore waters of Pingtung pre-sented a significant challenge to the system. In areas distant from the shore, the signals of the 4G mobile communication network became unstable. Tests demonstrated that even in these challenging environments, the system could still maintain basic monitoring functions by switching between different control platforms and communication modes.
Figure 11 provides underwater and control views from the monitoring equipment, illustrating the operational capabilities and interface perspectives during large-scale cage net monitoring.
3.6. Deployment Site–Xuejia Fish Pond
Geographic Location: Xuejia District, southwestern Taiwan, characterized by a freshwater or brackish water environment.
Experiment Purpose: To investigate the effectiveness and stability of aquaculture technology in freshwater and brackish water environments.
Experiment Content: The underwater ROV monitored fish pond water quality parameters in fish ponds, including conductivity and dissolved oxygen, as well as the growth conditions of cultured organisms. The integration of multiple remote control technologies facilitated remote operation and real-time data transmission.
In the tests conducted at the Xuejia fish ponds, the system exhibited excellent adaptability, comparable to that of cage environments. Thanks to improved network coverage in terrestrial settings, all control platforms functioned seamlessly. Notably, the tablet control mode proved particularly valuable in this context (
Figure 12), as its large screen enabled operators to simultaneously monitor multiple water quality parameters and underwater images, thereby facilitating precise operations. Researchers successfully operated the underwater ROV from the central control center to perform water quality monitoring and biological observations, obtaining and analyzing critical data such as dissolved oxygen levels, pH, and conductivity in real-time. This data was compared with traditional manual sampling methods, resulting in a significant reduction in labor input and sampling time.
4. Discussion
4.1. System Integration Innovation and Performance Analysis
The core innovation of this research lies in achieving smooth integration between heterogeneous control platforms and mobile communication technologies, resulting in combined benefits that exceed what individual components can achieve. Unlike traditional systems that depend on single control interfaces with limited communication ranges [
15,
16], this integrated approach facilitates genuine anytime, anywhere, multi-platform monitoring. The web-based Smart-Fish Control System showcases an exceptional architectural design by integrating ROV control, real-time imaging, and sensor data into a cohesive interface. Testing across five different locations demonstrated effective system performance: approximately 63% of transmissions succeeded within 1 s, with an overall reliability of 95.60% within 2 s during the extended Gongliao deployment. The system demonstrated consistent performance across diverse deployment scenarios, validating system reliability in various environmental conditions. This performance consistency provides empirical evidence that the multi-platform integration approach achieves superior performance compared to traditional single-interface systems, with measurable improvements in both reliability and operational flexibility. This integration facilitates dynamic platform switching based on operational requirements, creating practical synergistic workflows. Operators receive water quality anomaly alerts on smartwatches, conduct preliminary assessments via smartphones, and perform comprehensive analyses through centralized control centers. The system demonstrates significant advantages compared to existing commercial ROV systems (
Table 4). Commercial solutions such as the CHASING M2 PRO (5.7 kg), SEAMOR Marine ROV (21 kg), and Triton XLS 150 (4400 kg) lack remote control capabilities and depend on proprietary interfaces, while this system, weighing only 5.5 kg, offers multi-platform accessibility through standard 4G networks at dramatically reduced cost. The integration of YOLO recognition technology and dual-battery configuration provides 7.25 h of operation for the control system and 0.72 h for intensive maneuvering, effectively addressing resource constraints in developing regions.
4.2. Environmental Adaptability and Fault-Tolerant Performance
Testing across diverse aquaculture environments revealed environment-specific optimization patterns and system resilience. Near-shore environments, such as the Gongliao Aquatic Center and Xuejia fish ponds, demonstrated optimal performance with stable 4G coverage, enabling seamless multi-platform operation. Offshore deployments, particularly in Pingtung, presented moderate challenges due to signal fluctuations, yet underscored the system’s adaptive capabilities. The modular architecture facilitates automatic platform switching in response to varying network conditions, with smartphones emerging as the preferred choice for daily monitoring, tablets offering superior visual experiences for detailed inspections, and centralized control centers being essential for long-term analysis. Regarding fault redundancy and system reliability, the multiple remote control system features built-in fault redundancy capabilities. When smartphone control is unavailable due to network issues or battery depletion, users can effortlessly switch to alternative devices, ensuring continuous monitoring operations. This redundancy greatly enhances overall system reliability while maintaining operational flexibility across a range of environments, from freshwater to seawater and from near-shore to deep-sea applications.
4.3. Industry Transformation Framework and Future Development Trajectory
Autonomous System Transition and Technical Evolution: The current manual control system provides a solid foundation for autonomous development using a dual-processor setup, consisting of a Raspberry Pi 3 B+ and an STM32F103C8T6. This setup allows for a clear distinction between high-level decision-making and low-level motor control, thereby facilitating the progressive integration of adaptive navigation algorithms tailored for dynamic aquaculture environments. Additionally, it incorporates visual positioning and SLAM technology to enhance spatial awareness, as well as AI-driven intelligent recognition using YOLO for autonomous anomaly detection. Industry Impact and Application Prospects: This integration model addresses critical industry challenges, including labor shortages, an aging workforce, and demands for precision management. The system transforms traditional aquaculture from location-dependent operations to technology-enabled remote management, which is particularly crucial for Taiwan’s resource-limited coastal regions. Early adoption demonstrates the potential for global scalability while enabling operators to overcome location constraints and reduce the need for manual inspections.
Advanced development directions encompass enhanced multi-platform collaboration featuring intelligent control processes informed by user behavior and environmental awareness. The system will incorporate Augmented Reality (AR) and Virtual Reality (VR) control interfaces that provide intuitive remote operation experiences, simulating physical presence on-site. Additionally, collaborative monitoring across aquaculture farms via cloud-based platforms will allow individual operators to manage multiple dispersed sites. Integration with Beyond 5G and NTN technologies will extend operational range to deep-sea environments while ensuring economic accessibility through a modular design that supports incremental capability expansion. This research establishes a new paradigm that bridges traditional aquaculture practices with advanced technology, offering a viable pathway for industry-wide digital transformation. By integrating progressive technologies, the system aims to achieve fully automated inspection tasks and wireless operational capabilities, advancing toward truly autonomous intelligent aquaculture management. This approach provides scalable, technology-driven solutions for precision monitoring across various operational scales.
5. Conclusions
This research developed an innovative smart ocean aquaculture monitoring system integrating multiple remote control systems and mobile communication technologies as core design components. The comprehensive system architecture comprises three interconnected components: the underwater ROV, the buoy communication relay system, and the cloud server infrastructure. The cloud server incorporates four functional modules (Web Server, MQTT Service, RTSP Service, and MySQL Database) that facilitate smooth integration between heterogeneous control interfaces and mobile communication networks. The underwater ROV features a dual-controller architecture combining microcontroller units (MCUs) and Raspberry Pi 3 B+, equipped with underwater cameras and multifunctional water quality sensors to provide robust hardware foundations for extensive remote monitoring capabilities.
The main contribution of this research is integrating multiple control platforms while keeping communication reliable through existing 4G mobile networks. Unlike traditional aquaculture monitoring systems constrained by single control interfaces and limited communication ranges, this system enables operators to access and control the ROV through computers, smartphones, smartwatches, and multi-site central control centers, realizing true anytime, anywhere, multi-platform monitoring capabilities. The system architecture maintains flexible upgrade pathways to Beyond 5G and low-orbit satellite communications, ensuring long-term scalability for deep-sea aquaculture applications.
Comprehensive field validation across five distinct environments—including controlled laboratory settings, the Gongliao Aquatic Center, Keelung Harbor offshore cages, large-scale Pingtung offshore installations, and Xuejia freshwater ponds—demonstrated exceptional operational performance and communication stability. Quantitative analysis of over 500,000 data transmission events showed approximately 63% real-time transmission success within one second and 95.60% overall reliability within two seconds, validating the system’s practical applicability across diverse aquaculture environments. The integration enables real-time image transmission and sensor data collection, significantly enhancing water quality monitoring accuracy and operational efficiency compared to traditional manual inspection methods.
However, this research acknowledges several limitations that warrant consideration. First, the system’s performance remains dependent on 4G network coverage, which may limit applications in extremely remote offshore areas until Beyond 5G infrastructure becomes widely available. Second, the current ROV operational duration of 0.72 h under normal underwater conditions, while sufficient for routine monitoring, may require enhancement for extended inspection missions. Third, the system requires initial technical training for operators to maximize multi-platform capabilities, potentially creating adoption barriers in resource-limited regions. From a cost-effectiveness perspective, the modular design approach utilizing commercial hardware components significantly reduces implementation costs compared to proprietary ROV systems. The system’s TWD 3000–5000 estimated cost range make it particularly accessible for small-scale aquaculture operators, representing an approximate 60–80% cost reduction compared to equivalent commercial solutions such as the CHASING M2 PRO or SEAMOR Marine ROV systems. The multi-platform control capability eliminates the need for specialized control equipment, further reducing operational costs while improving monitoring flexibility.
The maturation of Beyond 5G and low-orbit satellite communication technologies will significantly expand this system’s operational capabilities in remote ocean environments. Future development directions include enhanced autonomous navigation algorithms, artificial intelligence-driven anomaly detection using integrated YOLO recognition technology, and collaborative monitoring networks enabling individual operators to manage multiple dispersed aquaculture sites. This research demonstrates that smart aquaculture monitoring systems integrating multiple remote control and mobile communication technologies can effectively facilitate the transformation of traditional aquaculture practices into precise, automated, and intelligent operations. The approach provides particularly valuable technical support and new approaches for small-scale aquaculture operators in Taiwan and other resource-limited regions, contributing to the sustainable development of global aquaculture industries through accessible and scalable technological advancement.
Author Contributions
Y.-H.L. contributed to the conception and supervision of this work (conceptualization, resources, methodology, writing—original draft, software), collected and analyzed the data, and interpreted the results. C.-F.S. contributed to the conception of this work (project administration, software). J.-J.W. contributed to the writing, design, and validation of this work. Y.-X.W. contributed to the writing and supervision of this work (writing—review and editing, software, project administration). C.-H.Y. contributed to the writing, design, and validation of this work. C.-C.C. contributed to the conception of this work, validation, data visualization, writing—review and editing, and funding acquisition. All authors have read and agreed to the published version of the manuscript.
Funding
The corresponding author would like to thank the National Science and Technology Council of Taiwan for their financial support (grant number MOST 111-2221-E-019-030 and NSTC 110-2221-E-019-041).
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare that there are no conflicts of interest regarding the publication of this paper.
Abbreviations
| AIoT | Artificial Intelligence of Things |
| IoT | Internet of Things |
| MQTT | Message Queuing Telemetry Transport |
| NTN | Non-Terrestrial Network |
| ROV | Remotely Operated Underwater Vehicle |
| RTSP | Real-Time Streaming Protocol |
| SIM | Subscriber Identity Module |
| 3GPP | 3rd Generation Partnership Project |
| FAO | Food and Agriculture Organization |
| Beyond 5G | Post-5G/Next-generation 5G |
| MCU | Microcontroller Unit |
| ESC | Electronic Speed Controller |
| AI | Artificial Intelligence |
| AR | Augmented Reality |
| VR | Virtual Reality |
| SLAM | Simultaneous Localization and Mapping |
References
- Food and Agriculture Organization of the United Nations. The State of World Fisheries and Aquaculture 2022: Towards Blue Transformation; FAO: Rome, Italy, 2022. [Google Scholar] [CrossRef]
- Naylor, R.L.; Hardy, R.W.; Buschmann, A.H.; Bush, S.R.; Cao, L.; Klinger, D.H.; Little, D.C.; Lubchenco, J.; Shumway, S.E.; Troell, M. A 20-Year Retrospective Review of Global Aquaculture. Nature 2021, 591, 551–563. [Google Scholar] [CrossRef] [PubMed]
- Boyd, C.E.; D’Abramo, L.R.; Glencross, B.D.; Huyben, D.C.; Juarez, L.M.; Lockwood, G.S.; McNevin, A.A.; Tacon, A.G.J.; Teletchea, F.; Tomasso, J.R.; et al. Achieving Sustainable Aquaculture: Historical and Current Perspectives and Future Needs and Challenges. J. World Aquac. Soc. 2020, 51, 578–633. [Google Scholar] [CrossRef]
- Costello, C.; Ovando, D.; Clavelle, T.; Strauss, C.K.; Hilborn, R.; Melnychuk, M.C.; Branch, T.A.; Gaines, S.D.; Szuwalski, C.S.; Cabral, R.B.; et al. Global Fishery Prospects under Contrasting Management Regimes. Proc. Natl. Acad. Sci. USA 2016, 113, 5125–5129. [Google Scholar] [CrossRef] [PubMed]
- O’Donncha, F.; Grant, J. Precision Aquaculture. IEEE Internet Things Mag. 2019, 2, 26–30. [Google Scholar] [CrossRef]
- Føre, M.; Frank, K.; Norton, T.; Svendsen, E.; Alfredsen, J.A.; Dempster, T.; Eguiraun, H.; Watson, W.; Stahl, A.; Sunde, L.M.; et al. Precision Fish Farming: A New Framework to Improve Production in Aquaculture. Biosyst. Eng. 2018, 173, 176–193. [Google Scholar] [CrossRef]
- Antonucci, F.; Costa, C. Precision Aquaculture: A Short Review on Engineering Innovations. Aquac. Int. 2020, 28, 41–57. [Google Scholar] [CrossRef]
- Beveridge, M.C.M.; Thilsted, S.H.; Phillips, M.J.; Belton, B.; Troell, M.; Leschen, W.; Little, D.C.; McAndrew, B.; Dickson, K.M.; Mair, G.C.; et al. Meeting the Food and Nutrition Needs of the Poor: The Role of Fish and the Opportunities and Challenges Emerging from the Rise of Aquaculture. J. Fish Biol. 2013, 83, 1067–1084. [Google Scholar] [CrossRef] [PubMed]
- Garlock, T.; Asche, F.; Anderson, J.; Bjørndal, T.; Kumar, G.; Lorenzen, K.; Ropicki, A.; Smith, M.D.; Tveterås, R. A Global Blue Revolution: Aquaculture Growth Across Regions, Species, and Countries. Rev. Fish. Sci. Aquac. 2020, 28, 107–116. [Google Scholar] [CrossRef]
- Lester, S.E.; Gentry, R.R.; Kappel, C.V.; White, C.; Gaines, S.D. Offshore Aquaculture in the United States: Untapped Potential in Need of Smart Policy. Proc. Natl. Acad. Sci. USA 2018, 115, 7162–7165. [Google Scholar] [CrossRef] [PubMed]
- Zhou, C.; Xu, D.; Lin, K.; Sun, C.; Yang, X. Intelligent Feeding Control Methods in Aquaculture with an Emphasis on Fish: A Review. Rev. Aquac. 2018, 10, 975–993. [Google Scholar] [CrossRef]
- Bao, J.; Li, D.; Qiao, X.; Rauschenbach, T. Integrated Navigation for Autonomous Underwater Vehicles in Aquaculture: A Review. Inf. Process. Agric. 2020, 7, 139–151. [Google Scholar] [CrossRef]
- Parra, L.; Sendra, S.; García, L.; Lloret, J. Design and Deployment of Low-Cost Sensors for Monitoring the Water Quality and Fish Behavior in Aquaculture Tanks during the Feeding Process. Sensors 2018, 18, 750. [Google Scholar] [CrossRef] [PubMed]
- García-Magariño, I.; Lacuesta, R.; Lloret, J. ABS-FishCount: An Agent-Based Simulator of Underwater Sensors for Measuring the Amount of Fish. Sensors 2017, 17, 2606. [Google Scholar] [CrossRef] [PubMed]
- Betancourt, J.; Coral, W.; Colorado, J. An Integrated ROV Solution for Underwater Net-Cage Inspection in Fish Farms Using Computer Vision SN. Appl. Sci. 2020, 2, 1946. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater Acoustic Sensor Networks: Research Challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Shi, W.; Cao, J.; Zhang, Q.; Li, Y.; Xu, L. Edge Computing: Vision and Challenges. IEEE Internet Things J. 2016, 3, 637–646. [Google Scholar] [CrossRef]
- Xiang, S.; Xie, Y.; Sun, X.; Du, H.; Wang, J. Identification and Quantification of Microplastics in Aquaculture Environment. Front. Mar. Sci. 2022, 8, 804208. [Google Scholar] [CrossRef]
- Akram, W.; Casavola, A.; Kapetanović, N.; Miškovic, N. A Visual Servoing Scheme for Autonomous Aquaculture Net Pens Inspection Using ROV. Sensors 2022, 22, 3525. [Google Scholar] [CrossRef] [PubMed]
- 3GPP. Study on Scenarios and Requirements for Next Generation Access Technologies 3GPP TR 38.913, Version 16.0.0; 3GPP: Sophia Antipolis, France, 2020.
- Kodheli, O.; Lagunas, E.; Maturo, N.; Sharma, S.K.; Shankar, B.; Monserrat, J.F.; Duncan, J.C.M.; Spano, D.; Chatzinotas, S.; Kisseleff, S.; et al. Satellite Communications in the New Space Era: A Survey and Future Challenges. IEEE Commun. Surv. Tutor. 2020, 23, 70–109. [Google Scholar] [CrossRef]
- Troell, M.; Naylor, R.L.; Metian, M.; Beveridge, M.; Tyedmers, P.H.; Folke, C.; Arrow, K.J.; Barrett, S.; Crépin, A.S.; Ehrlich, P.R.; et al. Does Aquaculture Add Resilience to the Global Food System? Proc. Natl. Acad. Sci. USA 2014, 111, 13257–13263. [Google Scholar] [CrossRef] [PubMed]
- IEEE 802.11ax-2021; IEEE Standard for Information Technology—Telecommunications and Information Exchange Between Systems—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications—Amendment 1: Enhancements for High-Efficiency WLAN. IEEE: New York, NY, USA, 2021.
Figure 1.
Overall architecture of the smart ocean aquaculture monitoring system.
Figure 1.
Overall architecture of the smart ocean aquaculture monitoring system.
Figure 2.
Cloud and software architecture for underwater vehicle communication. (a) Overall software architecture diagram; (b) Software component connection architecture diagram.
Figure 2.
Cloud and software architecture for underwater vehicle communication. (a) Overall software architecture diagram; (b) Software component connection architecture diagram.
Figure 3.
Central control room setup at National Taiwan Ocean University. (a) Operator monitoring ROV data via multi-screen station. (b) Researchers analyzing real-time data collaboratively.
Figure 3.
Central control room setup at National Taiwan Ocean University. (a) Operator monitoring ROV data via multi-screen station. (b) Researchers analyzing real-time data collaboratively.
Figure 4.
System control interface displaying a real-time monitoring dashboard that includes video streaming, sensor data visualization, and controls for remotely operated vehicle functions.
Figure 4.
System control interface displaying a real-time monitoring dashboard that includes video streaming, sensor data visualization, and controls for remotely operated vehicle functions.
Figure 5.
Deployment and power configuration of communication modules in the ROV system. (a) Deployed buoy system serving as communication relay; (b) Close-up of ROV communication module with integrated solar panel.
Figure 5.
Deployment and power configuration of communication modules in the ROV system. (a) Deployed buoy system serving as communication relay; (b) Close-up of ROV communication module with integrated solar panel.
Figure 6.
Prototype of the self-developed underwater ROV.
Figure 6.
Prototype of the self-developed underwater ROV.
Figure 7.
Smart device-controlled ROV monitoring. (a) Smartphone-controlled laboratory test at National Taiwan Ocean University. (b) Smartwatch interface during offshore testing at Keelung Harbor.
Figure 7.
Smart device-controlled ROV monitoring. (a) Smartphone-controlled laboratory test at National Taiwan Ocean University. (b) Smartwatch interface during offshore testing at Keelung Harbor.
Figure 8.
Smartphone-based operations in cage net aquaculture at the Gongliao Aquatic Center.
Figure 8.
Smartphone-based operations in cage net aquaculture at the Gongliao Aquatic Center.
Figure 9.
Installation of cage nets in the open sea off Keelung Harbor.
Figure 9.
Installation of cage nets in the open sea off Keelung Harbor.
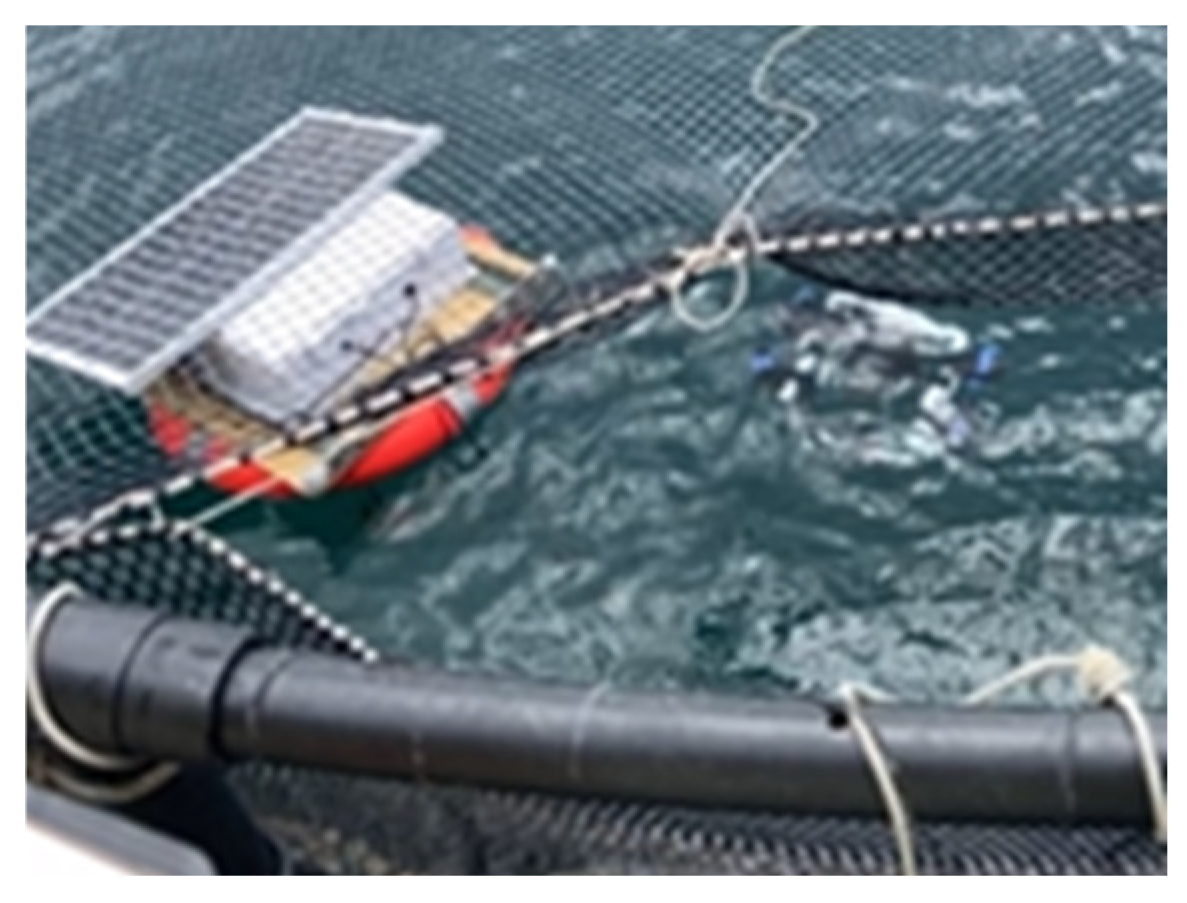
Figure 10.
Aquaculture pen monitoring setup at a large-scale cage net in Jiaque Bay, Pingtung.
Figure 10.
Aquaculture pen monitoring setup at a large-scale cage net in Jiaque Bay, Pingtung.
Figure 11.
Underwater and control views from monitoring equipment at a large-scale cage net in Jiaque Bay, Pingtung.
Figure 11.
Underwater and control views from monitoring equipment at a large-scale cage net in Jiaque Bay, Pingtung.
Figure 12.
Tablet-controlled ROV deployment at Xuejia Fish Pond.
Figure 12.
Tablet-controlled ROV deployment at Xuejia Fish Pond.
Table 1.
Introduction to water quality sensor specifications.
Table 1.
Introduction to water quality sensor specifications.
| Sensor Model | Measurement Range | Technology | Sensitivity |
|---|
| CS4751 Dissolved Oxygen Sensor | 0–40 mg/L | Polarography method | Current output 400 nA |
| CS1529 pH Sensor | pH 0–14 | Glass electrode with SNEX reference system and double salt bridge | Approximately 59 mV/pH (standard value for glass electrodes) |
| CS3740 Salinity Sensor | 0.01–500 mS/cm | Four-pole conductivity measurement, graphite electrodes | Cell constant K = 0.4 cm−1 |
Table 2.
Motor current consumption and operating duration for ROV propulsion system.
Table 2.
Motor current consumption and operating duration for ROV propulsion system.
| Operating Mode | Motor 1
(Horizontal Forward) | Motor 2
(Horizontal Reverse) | Motor 3
(Vertical Reverse) | Motor 4
(Vertical Forward) | Estimated
Operating Duration |
|---|
| Maximum Current in Air | 0.83 A | 0.94 A | 0.82 A | 0.7 A | 6.4 h |
| Maximum Current in Water | 19.4 A | 21.5 A | 19.7 A | 18.4 A | 0.13 h |
| Normal Underwater Operation | 3.5 A | 4.24 A | 3.75 A | 3.1 A | 0.72 h |
Table 3.
Progressive deployment strategy for ROV testing environments.
Table 3.
Progressive deployment strategy for ROV testing environments.
| Test Environment | Test Location | Environmental Conditions | Test Parameters/Monitoring Items | Communication Conditions | Test Items/Operation Mode |
|---|
| Laboratory Controlled Environment Testing | Indoor aquaculture tanks at the Marine Biology Cultivation Hall, National Taiwan Ocean University | 1–5 cubic meter cultivation tanks utilizing both freshwater and seawater environments | Temperature, pH value, dissolved oxygen levels | 4G mobile network video transmission | Motor speed calibration, basic motion control (forward/backward movement, turning, ascending/descending); Validation method: Cross-comparison between ROV sensor readings and handheld instruments |
| Nearshore Cage Environment Testing | Gongliao Aquatic Center cage aquaculture farm | Nearshore marine environment with relatively stable network coverage | Water quality parameters (dissolved oxygen, pH value), aquaculture organism growth conditions | - | Control method: Multi-platform remote control system integration testing |
| Offshore Cage Environment Testing | Keelung Harbor offshore cage (offshore from National Taiwan Ocean University Small Boat Pier) | Dynamic offshore environment with significant current and wave influences | Temperature, salinity, cage structure stability | Assessment of communication stability in offshore environments | Operation mode: Real-time path adjustment and monitoring strategy optimization |
| Long-distance Large-scale Cage Testing | Pingtung offshore large-scale cage (Jiajin offshore cage) | Offshore environment at considerable distance from shore | Aquaculture organism density, distribution, health status, cage structure | System adaptability verification in areas with unstable 4G signals | System performance: Verification of multi-platform communication integration advantages |
| Shallow Water Aquaculture Environment Testing | Traditional fish ponds in Xuejia, Tainan | Shallow freshwater/brackish water environment | Conductivity, dissolved oxygen, pH value | - | - |
Table 4.
Comparative analysis of ROV technical specifications.
Table 4.
Comparative analysis of ROV technical specifications.
Innovation
Category | This Study | CHASING M2 PRO | SEAMOR Marine ROV | Triton XLS 150 |
|---|
Remote Control
Architecture | 4G/5G wireless
network-based
remote control | Cable-tethered
control only | Cable-tethered
control only | Cable-tethered
control only |
Multi-Platform
Integration | Smartphones,
tablets,
computers,
smartwatches,
centralized control | Dedicated
controller only | Shore-based
platform only | Shore-based
platform only |
Real-time
Data Transmission | Cloud-based
architecture with 95.6%
reliability within
2 s | Local storage only | Tethered
transmission only | Tethered real-time |
| Communication Protocol | MQTT, RTSP,
4G/5G networks | Cable-based data
transmission | Fiber optic or
twisted-pair tether | Fiber optic tether |
| Cost-Effectiveness | TWD 3000–5000 | TWD 8000–12,000 | TWD 15,000–50,000 | TWD 500,000+ |
| AI Integration | YOLO object
recognition technology | 4K camera with
EIS anti-shake | EISHD camera
with LED lighting | Low-light CCD,
color zoom cameras |
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}