
A Computational Study on the Excitation Forces of Partially Submerged Propellers for High-Speed Boats


Abstract
1. Introduction
2. Computation Method
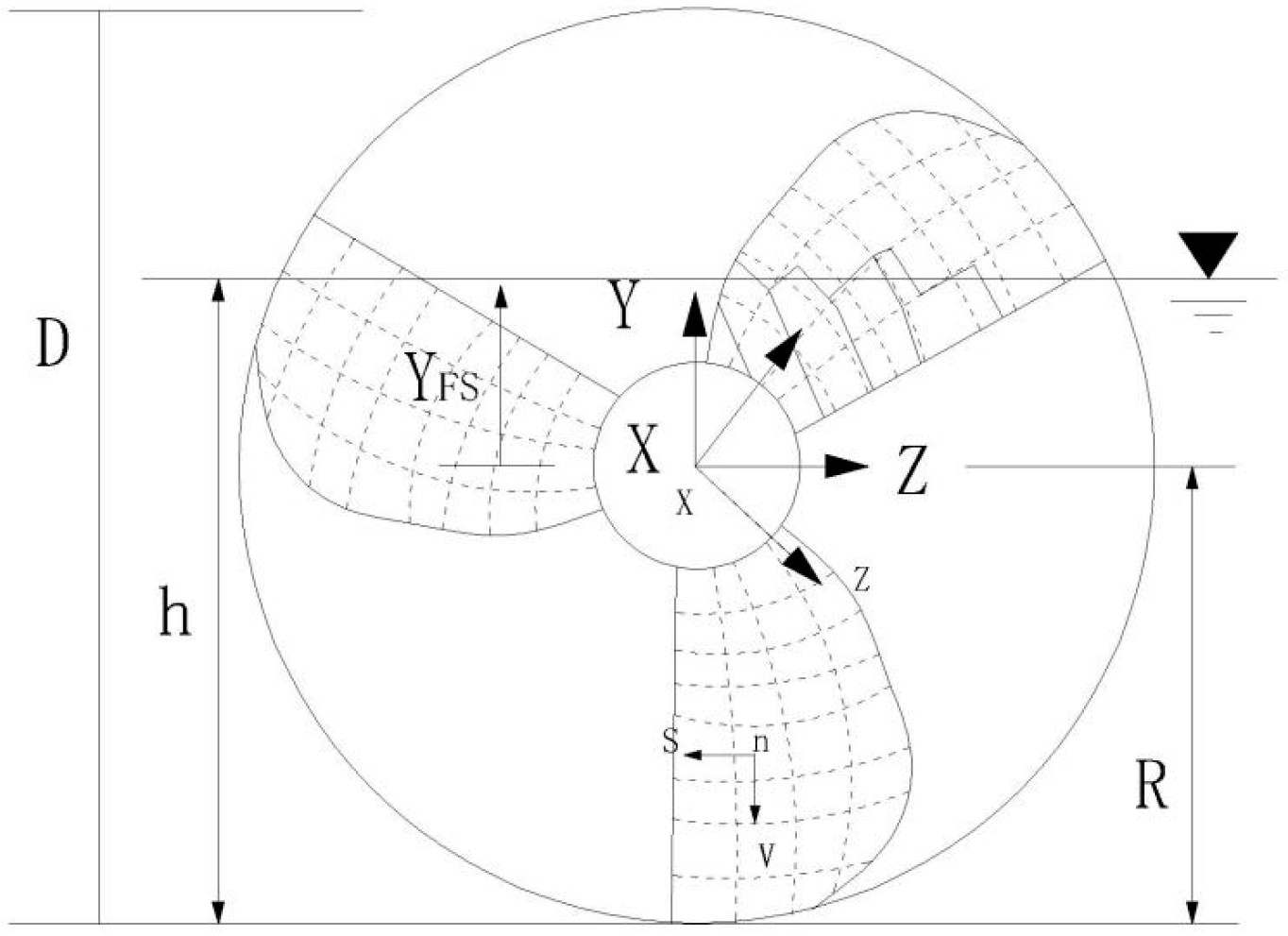
2.1. Linearized Boundary Conditions for Free Surfaces
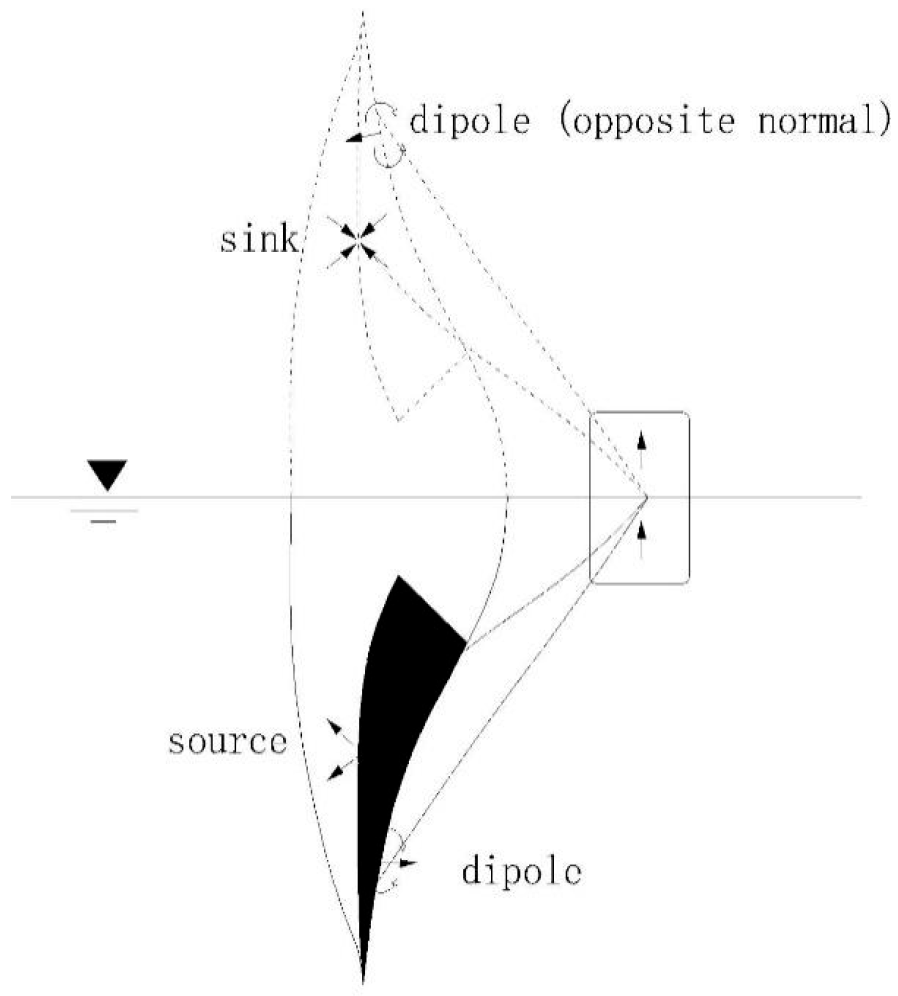
2.2. Boundary Integral Equation
2.3. Moving Boundary Conditions for Wetted Blade Surfaces
2.4. Dynamic Boundary Conditions for a Ventilated Cavity Surface
2.5. Moving Boundary Conditions for a Ventilated Cavitation Surface
3. Numerical Simulation
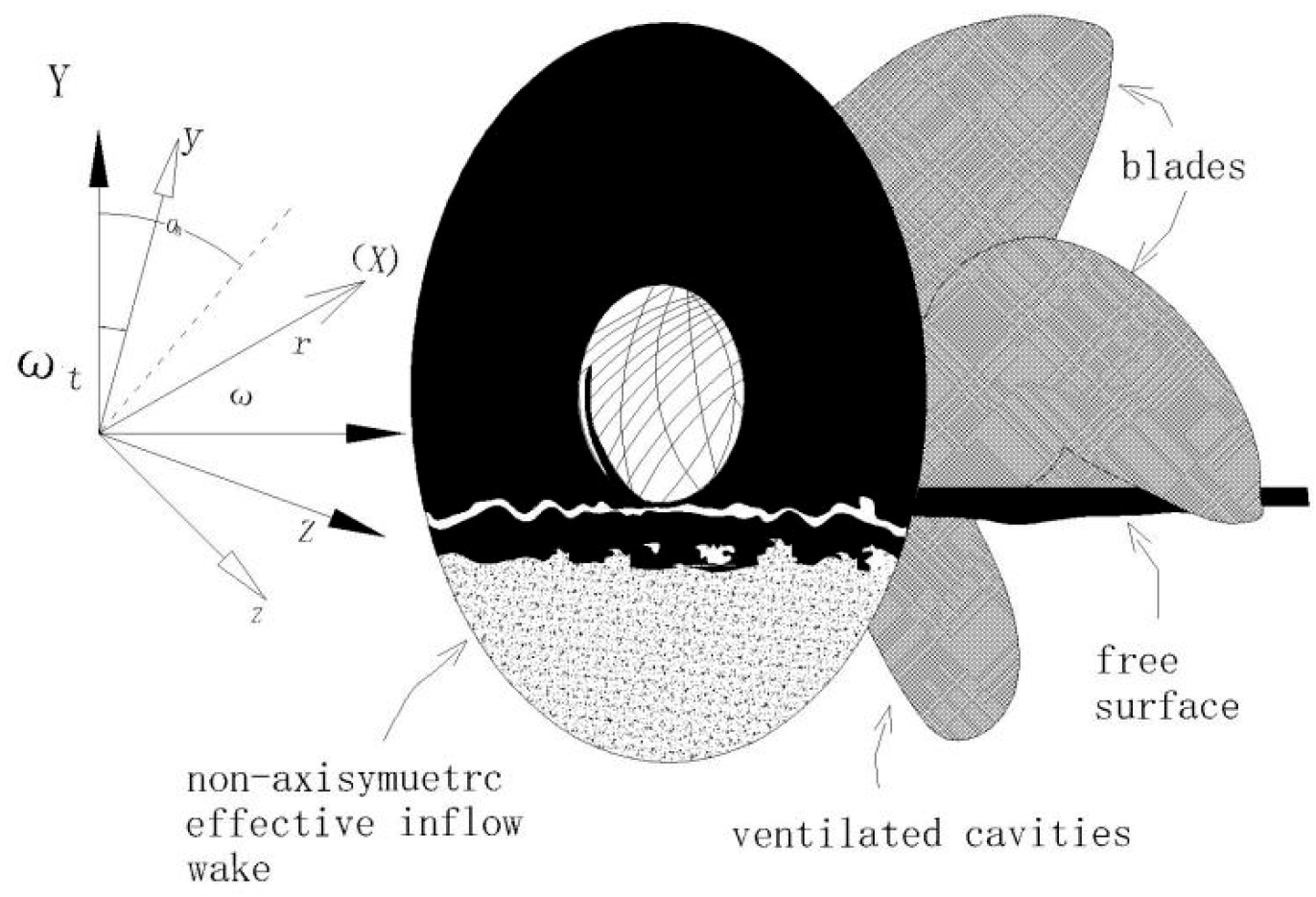
3.1. Fluid Domain Modeling
3.2. Governing Equations
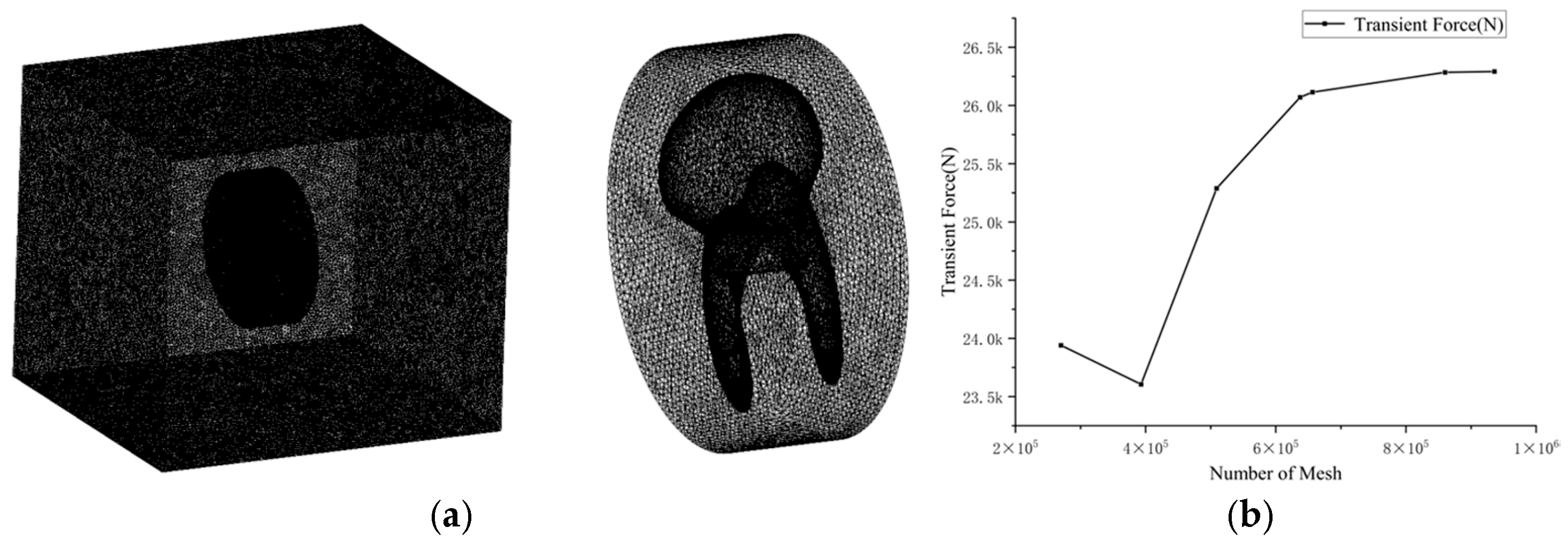
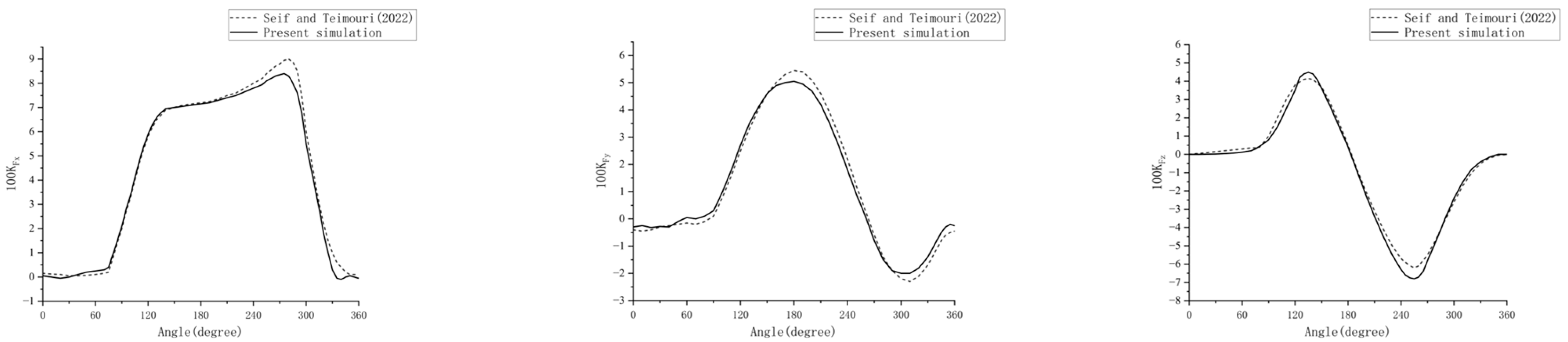
3.3. Meshing and Model Validation
3.4. Boundary Conditions and Initial Conditions
4. Computation Results and Analysis
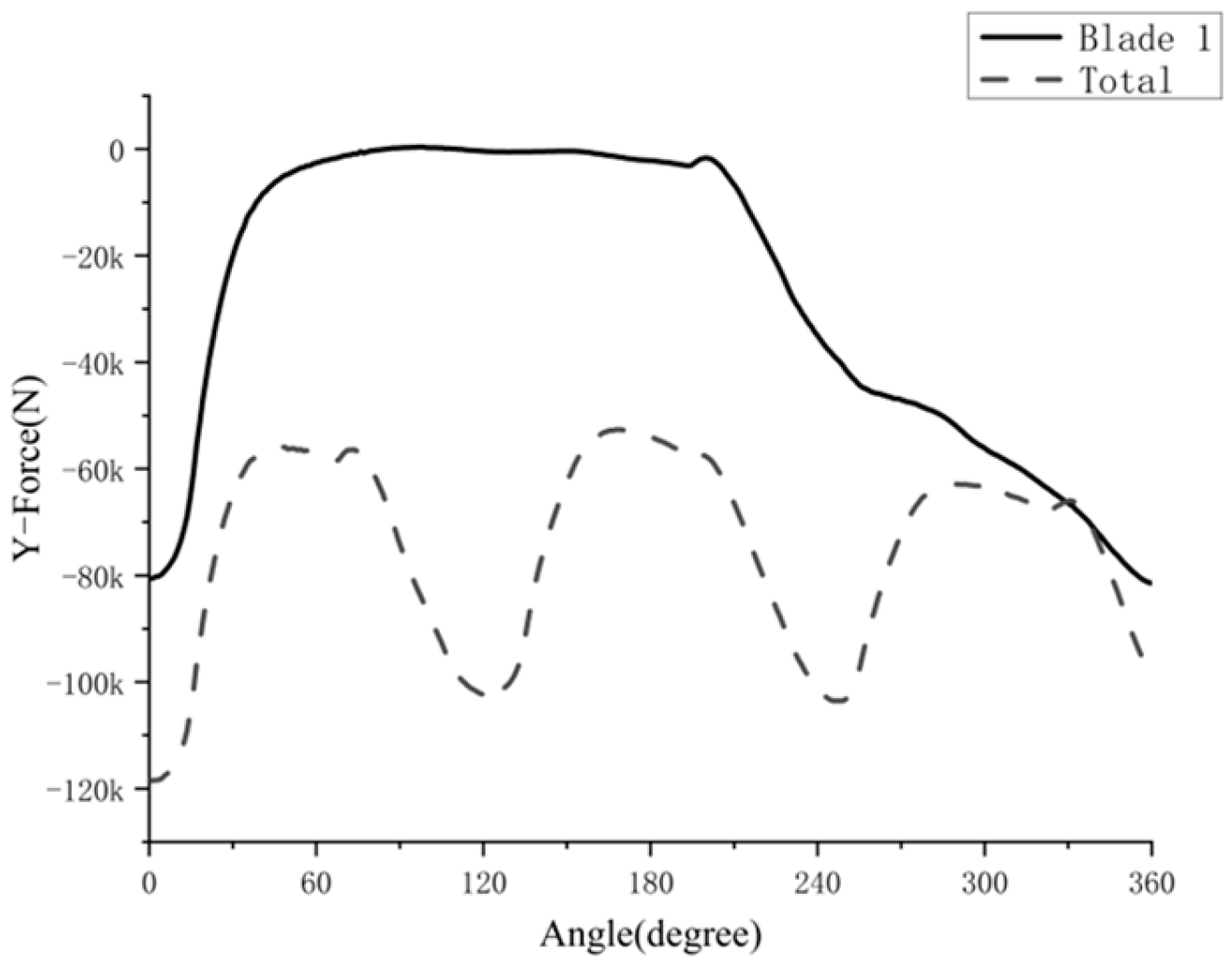
4.1. Force–Time Analysis
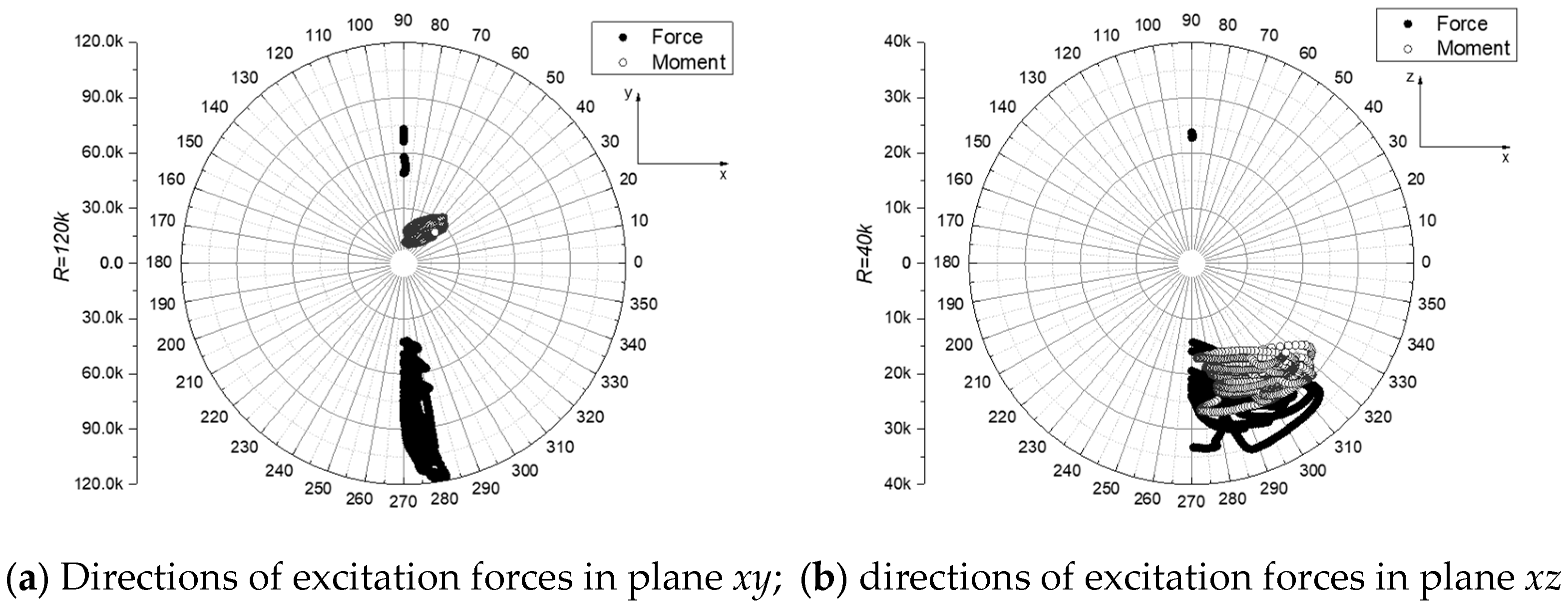
4.2. Vector Orientation
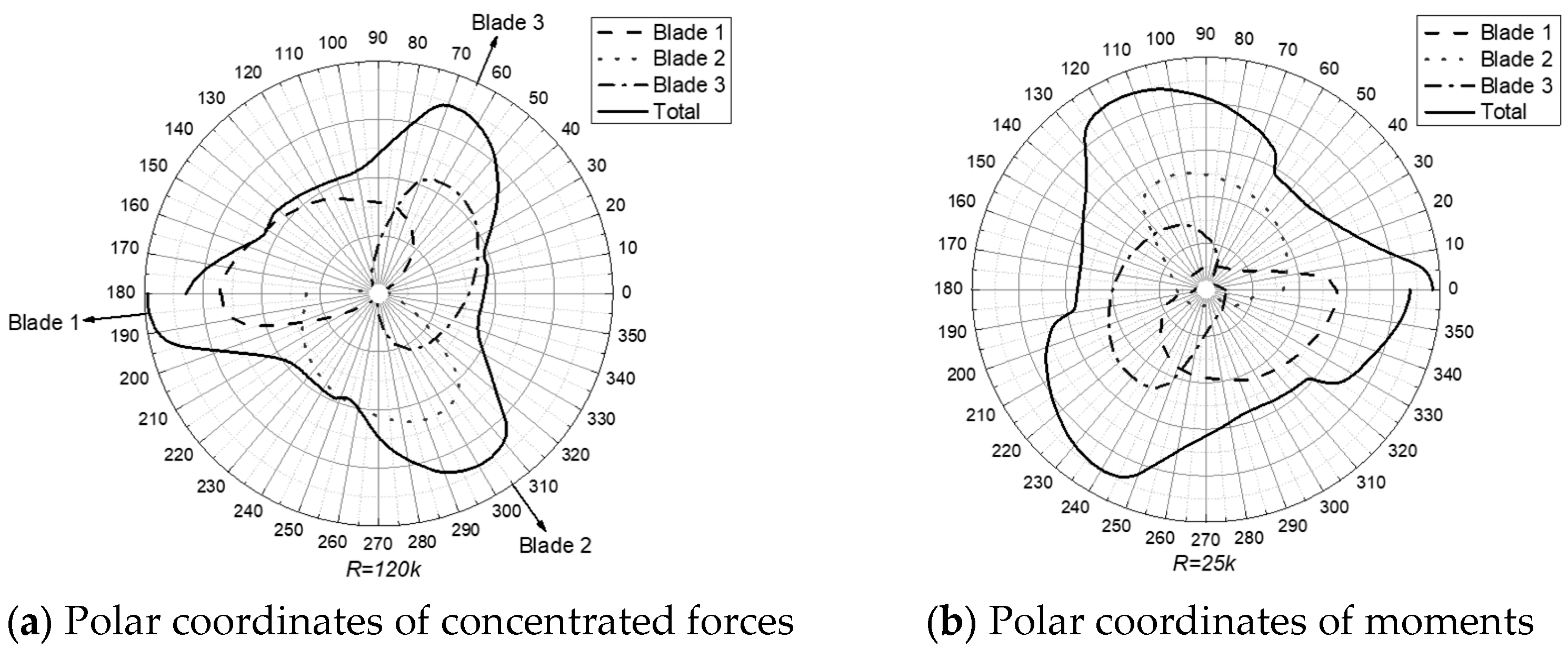
4.3. Analysis of Phase Relationships in Excitation Forces and Visualization of Blade Contributions
5. Conclusions and Future Work
- (1)
- This study outlined theoretical computational considerations for assessing propeller performance, grounded in fluid dynamics principles related to water entry. A numerical simulation model was subsequently employed to investigate the periodic characteristics of six force components (in the shaft, vertical, and lateral directions) of a partially submerged propeller under the simulated conditions.
- (2)
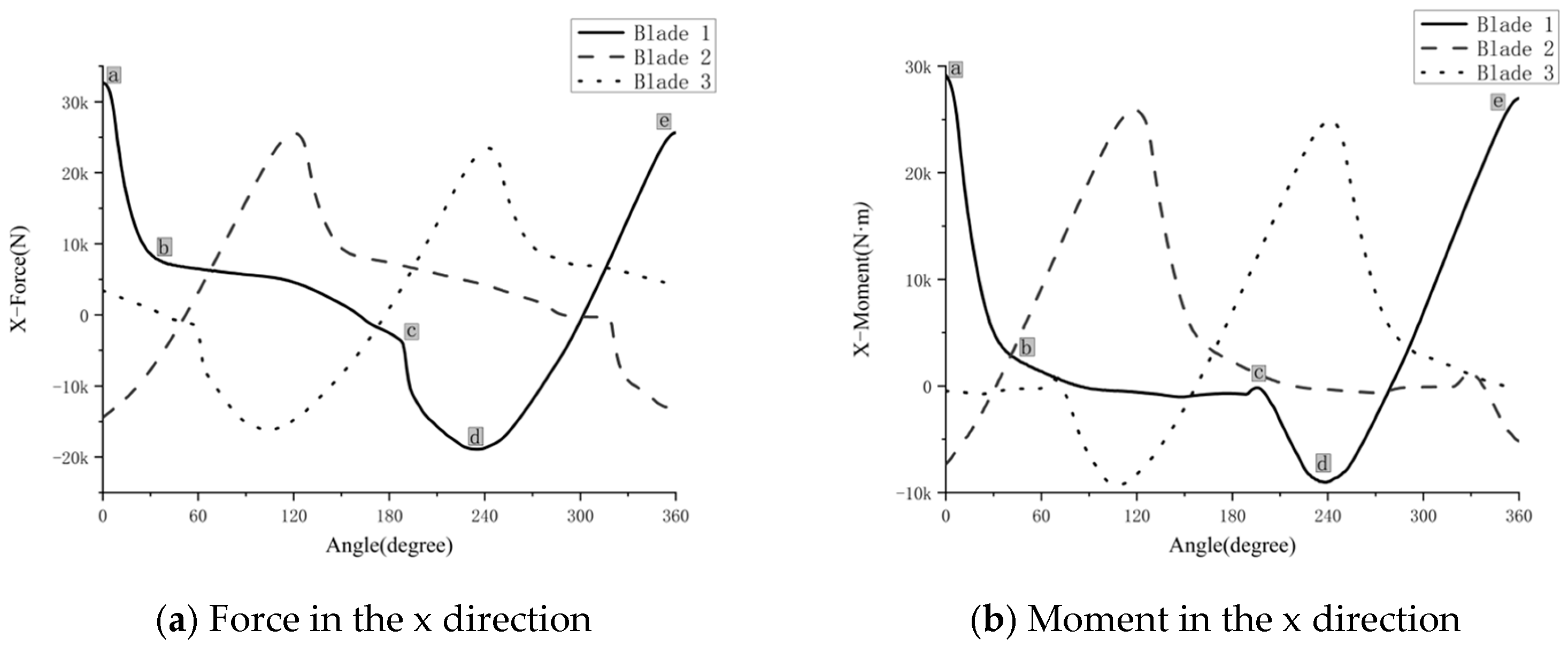
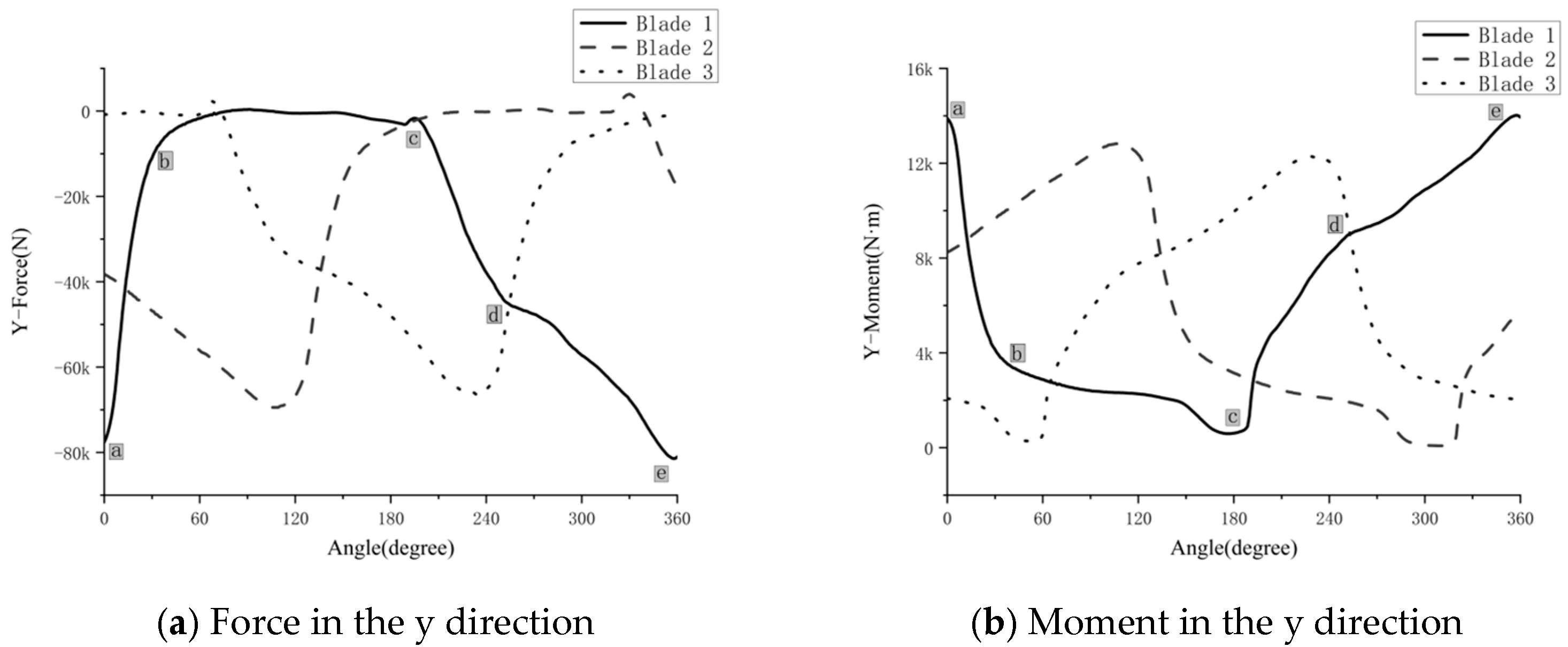
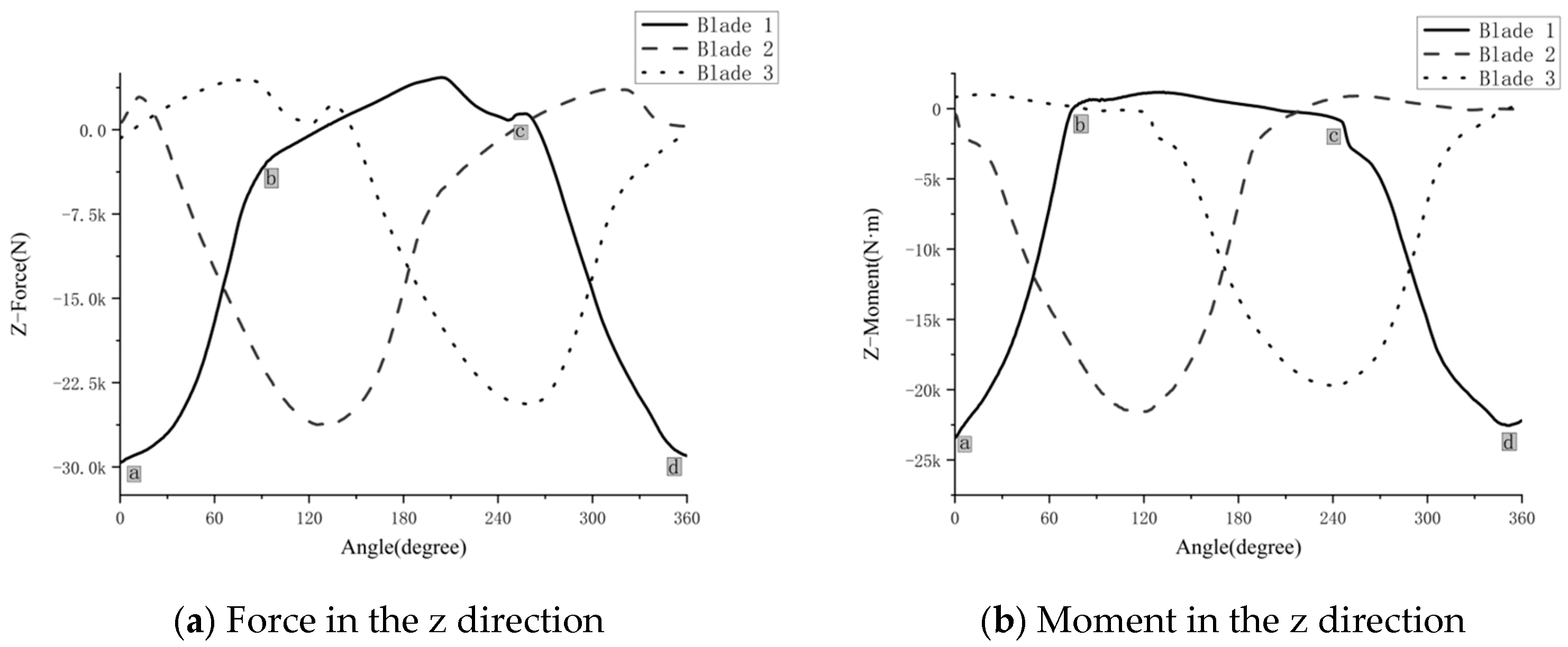
- The excitation loads (encompassing both forces and moments) acting on a single blade of the partially submerged propeller, as characterized by the current CFD model, exhibited highly dynamic characteristics under the simulated conditions. Pulsation amplitudes of the non-axial forces and bending moments were observed to often reach levels corresponding to 50–80% of their respective peak magnitudes. Such pronounced, multi-axial, and unsteady loads, identified in this computational exploration, are considered potentially significant dynamic inputs to the shafting system.
- (3)
- A visualization technique using polar coordinates was utilized to explore the simulated phase relationships between individual blade excitation forces and the total propeller forces. This approach may offer a means to better understand how the sequential loading of blades, based on their angular positions derived from the CFD simulation, could contribute to the overall periodic excitation patterns observed.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chaitanya, N.; Murthy, Y.S.; Madaka, R.M.M.R.; Balaji, R.; Narayanan, J.; Hulmani, R.M. Vibrartion Analysis of Fibre Glass Contra Rotating Propeller of Fishing Vessel. In Proceedings of the OCEANS 2022—Chennai, Chennai, India, 21–24 February 2022; pp. 1–5. [Google Scholar]
- Tian, J.; Zhang, Z.; Ni, Z.; Hua, H. Flow-induced vibration analysis of elastic propellers in a cyclic inflow: An experimental and numerical study. Appl. Ocean Res. 2017, 65, 47–59. [Google Scholar] [CrossRef]
- Zhu, J.C.; Zhu, H.H.; Yan, X.P.; Jiang, P. A Research on the Influence of Vessel-Propeller Coupling Effect to Shaft’s Lateral Vibration. Appl. Mech. Mater. 2012, 226–228, 106–112. [Google Scholar] [CrossRef]
- Javanmardi, N.; Ghadimi, P. Hydroelastic analysis of a semi-submerged propeller using simultaneous solution of Reynolds-averaged Navier–Stokes equations and linear elasticity equations. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 232, 199–211. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, L.; Hua, H. Longitudinal vibration of marine propeller-shafting system induced by inflow turbulence. J. Fluids Struct. 2017, 68, 264–278. [Google Scholar] [CrossRef]
- Huang, Q.; Yan, X.; Zhang, C.; Zhu, H. Coupled transverse and torsional vibrations of the marine propeller shaft with multiple impact factors. Ocean Eng. 2019, 178, 48–58. [Google Scholar] [CrossRef]
- Jiang, X.; Zhou, X.; Chen, K. Vibration characteristics of a marine propulsion shaft excited by the effect of propeller and diesel. In Proceedings of the 2015 International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, 25–28 June 2015; pp. 893–897. [Google Scholar]
- Huang, Q.; Xia, J.; Liu, H. Friction-induced vibration of marine propeller shaft based on the LuGre friction model. J. Mech. Sci. 2023, 37, 3867–3876. [Google Scholar]
- Furuya, O. A performance-prediction theory for partially submerged ventilated propellers. J. Fluid Mech. 1985, 151, 311–335. [Google Scholar] [CrossRef]
- Young, Y. Numerical Modeling of Supercavitating and Surface-Piercing Propellers. Ph.D. Thesis, The University of Texas at Austin, Austin, TX, USA, 2002. [Google Scholar]
- Vorus, W.S. Forces on Surface-Piercing Propellers with Inclination. J. Ship Res. 1991, 35, 210–218. [Google Scholar] [CrossRef]
- Lewis, E.V. Principles of Naval Architecture; Society of Naval Architects and Marine Engineers: Jersey City, NI, USA, 1989; Volume 2, Chapter 7. [Google Scholar]
- Kudo, T.; And Ukon, Y. Calculation of supercavitating propeller performance using a vortex-lattice method. In Proceedings of the 2nd International Symposium on Cavitation, Tokyo Japan, 5–7 April 1994; pp. 403–408. [Google Scholar]
- Kudo, T.; And Kinnas, S. Application of vortex/source lattice method on supercavitating propellers. In Proceedings of the 24th American Towing Tank Conference, College Station, TX, USA, 2–3 November 1995. [Google Scholar]
- Savineau, C.; And Kinnas, S. A numerical formulation applicable to surface piercing hydrofoils and propellers. In Proceedings of the 24th American Towing Tank Conference, College Station, TX, USA, 2 November 1995. [Google Scholar]
- Rose, J.C. Methodical series model test results. In Proceedings of the Fast ’91, 1st International Conference on Fast Sea Transportation, Trondheim, Norway, 17–21 June 1991. [Google Scholar]
- Olofsson, N.A. Contribution on the Performance of Partially Submerged Propellers. In Fast ’93, 2nd International Conference on Fast Sea Transportation, Yokohama, Japan, 13–16 December 1993; Sponsored by Min Transport, Japan & Sasakawa Foundation; Japan Society of Naval Architects and Ocean Engineers: Tokyo, Japan, 1993; Volume 1, p. 765. ISBN 4-930966-00-0. [Google Scholar]
- Olofsson, N. Force and Flow Characteristics of a Partially Submerged Propeller. Ph.D. Thesis, Department of Naval Architecture and Ocean Engineering, Chalmers University of Technology, Göteborg, Sweden, February 1996. [Google Scholar]
- Miller, W.; Szantyr, J. Model experiments with surface piercing propellers. Schiffstechnik 1998, 45, 14–21. [Google Scholar]
- Caponnetto, M. RANSE simulations of surface piercing propellers. In Proceedings of the 6th Numerical Towing Tank Symposium, Rome, Italy, 29 September–1 October 2003. [Google Scholar]
- Kinnas, S.; And Fine, N. A nonlinear boundary element method for the analysis of unsteady propeller sheet cavitation. In Proceedings of the 19th Symposium on Naval Hydrodynamics, Seoul, Republic of Korea, 23–28 August 1992; pp. 717–737. [Google Scholar]
- Young, Y.L.; Kinnas, S.A. A BEM for the prediction of unsteady midchord face and/or back propeller cavitation. J. Fluids Eng. 2001, 123, 311–319. [Google Scholar] [CrossRef]
- Young, Y.L.; Kinnas, S.A. Numerical modeling of supercavitating propeller flows. J. Ship Res. 2003, 47, 48–62. [Google Scholar] [CrossRef]
- Kinnas, S.; Choi, J.; Lee, H.; And Young, J. Numerical cavitation tunnel, Proceedings, NCT50. In Proceedings of the International Conference on Propeller Cavitation, Newcastle upon Tyne, UK, 3–5 April 2000. [Google Scholar]
- Choi, J. Vortical Inflow-Propeller Interaction Using Unsteady Three-dimensional Euler Solver. Ph.D. Thesis, Department of Civil Engineering, The University of Texas at Austin, Austin, TX, USA, August 2000. [Google Scholar]
- Shiba, H. Air-Drawing of Marine Propellers; Technical Report 9; Transportation Technical Research Institute: Istanbul, Turkey, 1953. [Google Scholar]
- Brandt, H. Modellversuche mit schiffspropellern an der wasseroberfläche. Schiff Und Hafen 1973, 5, 415–422. [Google Scholar]
- Kinnas, S.A.; Fine, N.E. A numerical nonlinear analysis of the flow around two- and three-dimensional partially cavitating hydrofoils. J. Fluid Mech. 1993, 254, 151–181. [Google Scholar] [CrossRef]
- Fine, N.E. Nonlinear Analysis of Cavitating Propellers in Nonuniform Flow. Ph.D. Thesis, Department of Ocean Engineering, Massachusetts Institute of Technology, Cambridge, MA, USA, October 1992. [Google Scholar]
- Yakhot, V.; Orszag, S.A. Renormalization group analysis of turbulence. I. Basic theory. J. Sci. Comput. 1986, 1, 3–51. [Google Scholar] [CrossRef]
- Seif, M.S.; Teimouri, M. Experimental and numerical investigation of hydrodynamic performance of a new surface piercing propeller family. Ocean Eng. 2022, 264, 112161. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Force Component (Blade 1) | Symbol | Min. Value (kN) | Max. Value (kN) | Peak-to-Peak (kN) | Pulsation Amplitude (Amp.) (kN) | Amp. as % of Max. Peak Magnitude | Amp. as % of Blade 1 Avg. Thrust |
|---|---|---|---|---|---|---|---|
| Vertical Force (Fx) | Fx | −18 | 28 | 46 | 23 | 82.1% (23/28) | 57.5% (23/40) |
| Thrust (Fy) | Fy | −80 | 0 | 80 | 40 | 50.0% (40/80) | 100% (40/40) |
| Lateral Force (Fz) | Fz | −30 | 2 | 32 | 16 | 53.3% (16/30) | 40.0% (16/40) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, F.; Liu, Y.; Wang, J.; Li, R.; Pang, L. A Computational Study on the Excitation Forces of Partially Submerged Propellers for High-Speed Boats. J. Mar. Sci. Eng. 2025, 13, 1169. https://doi.org/10.3390/jmse13061169
Wei F, Liu Y, Wang J, Li R, Pang L. A Computational Study on the Excitation Forces of Partially Submerged Propellers for High-Speed Boats. Journal of Marine Science and Engineering. 2025; 13(6):1169. https://doi.org/10.3390/jmse13061169
Chicago/Turabian StyleWei, Fangshuai, Yujun Liu, Ji Wang, Rui Li, and Lin Pang. 2025. "A Computational Study on the Excitation Forces of Partially Submerged Propellers for High-Speed Boats" Journal of Marine Science and Engineering 13, no. 6: 1169. https://doi.org/10.3390/jmse13061169
APA StyleWei, F., Liu, Y., Wang, J., Li, R., & Pang, L. (2025). A Computational Study on the Excitation Forces of Partially Submerged Propellers for High-Speed Boats. Journal of Marine Science and Engineering, 13(6), 1169. https://doi.org/10.3390/jmse13061169