
An Investigation of Reverberation Received by a Vertical Antenna at Short Ranges in Shallow Seas


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
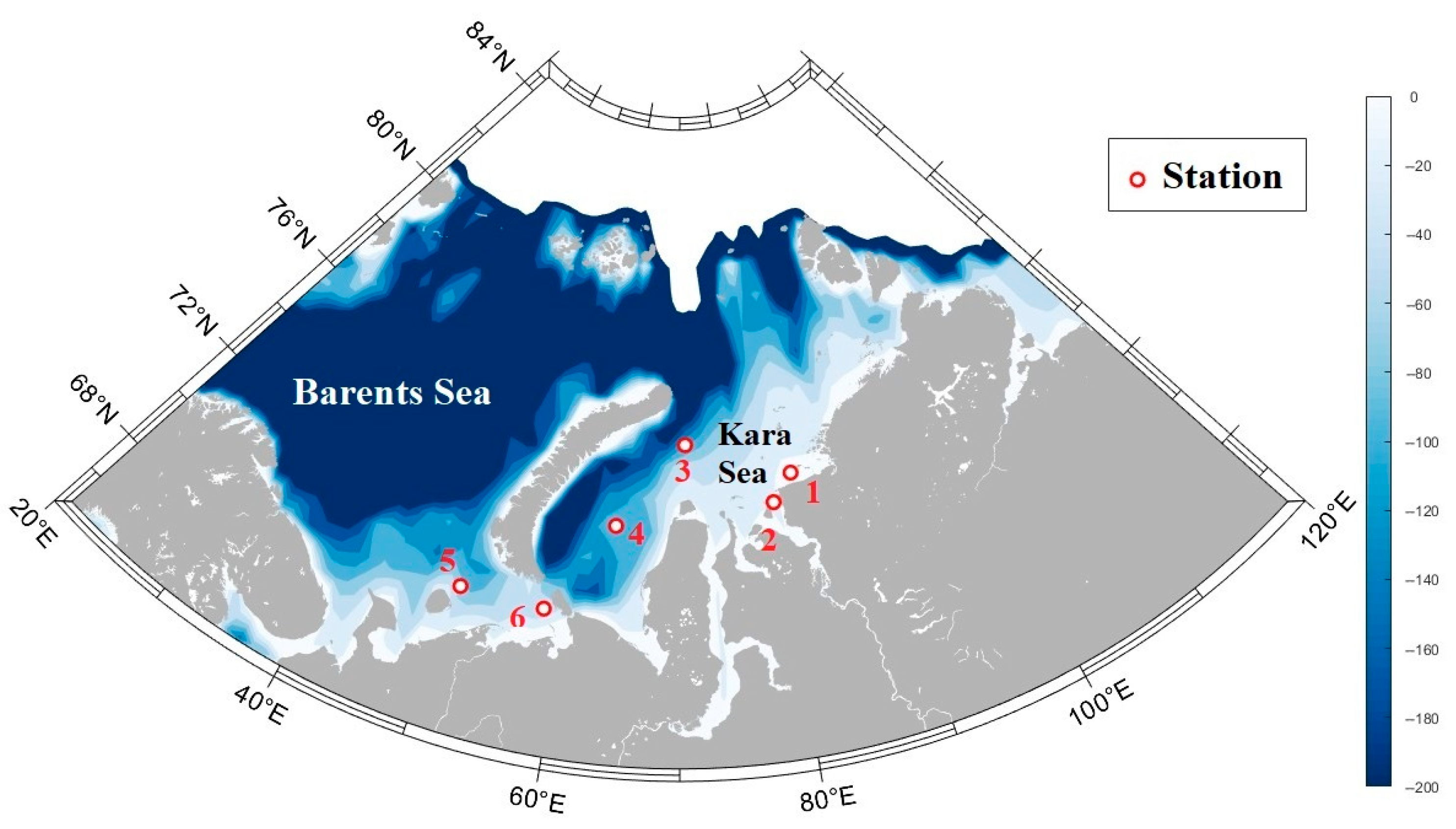
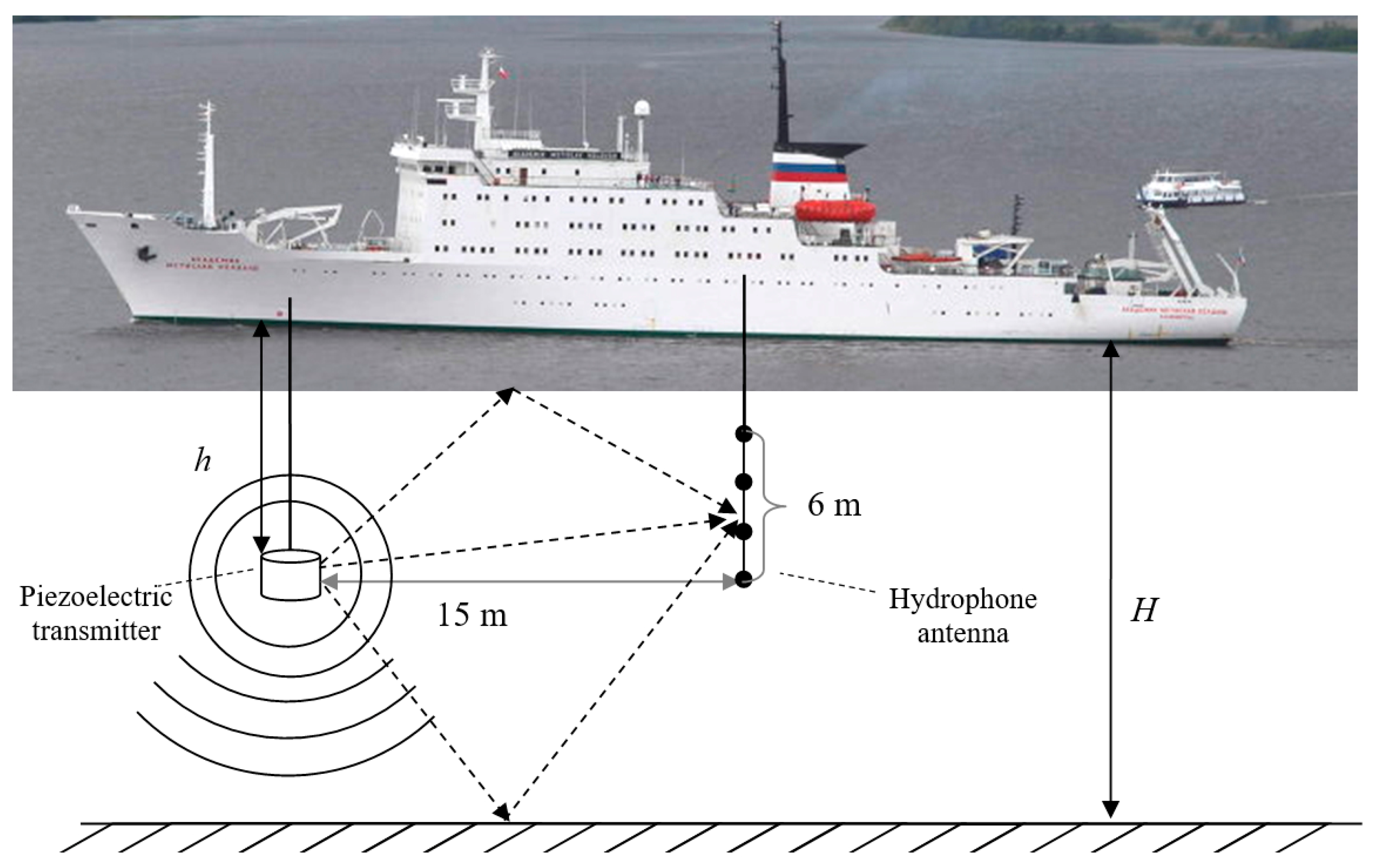
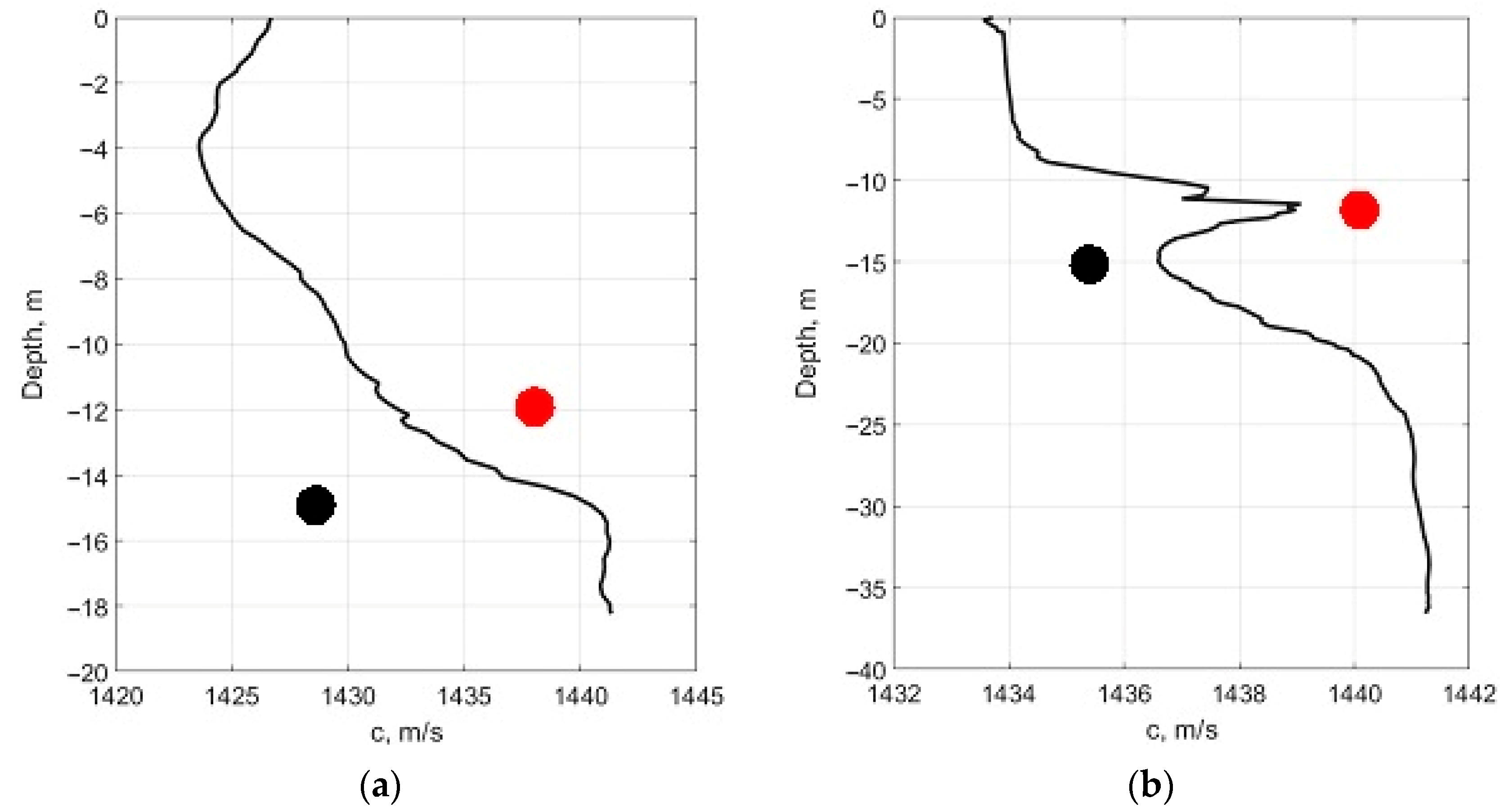
2.1. Experimental Information
2.2. Model
3. Results
3.1. General Results
3.2. Bottom Reflected Parameters Statistics
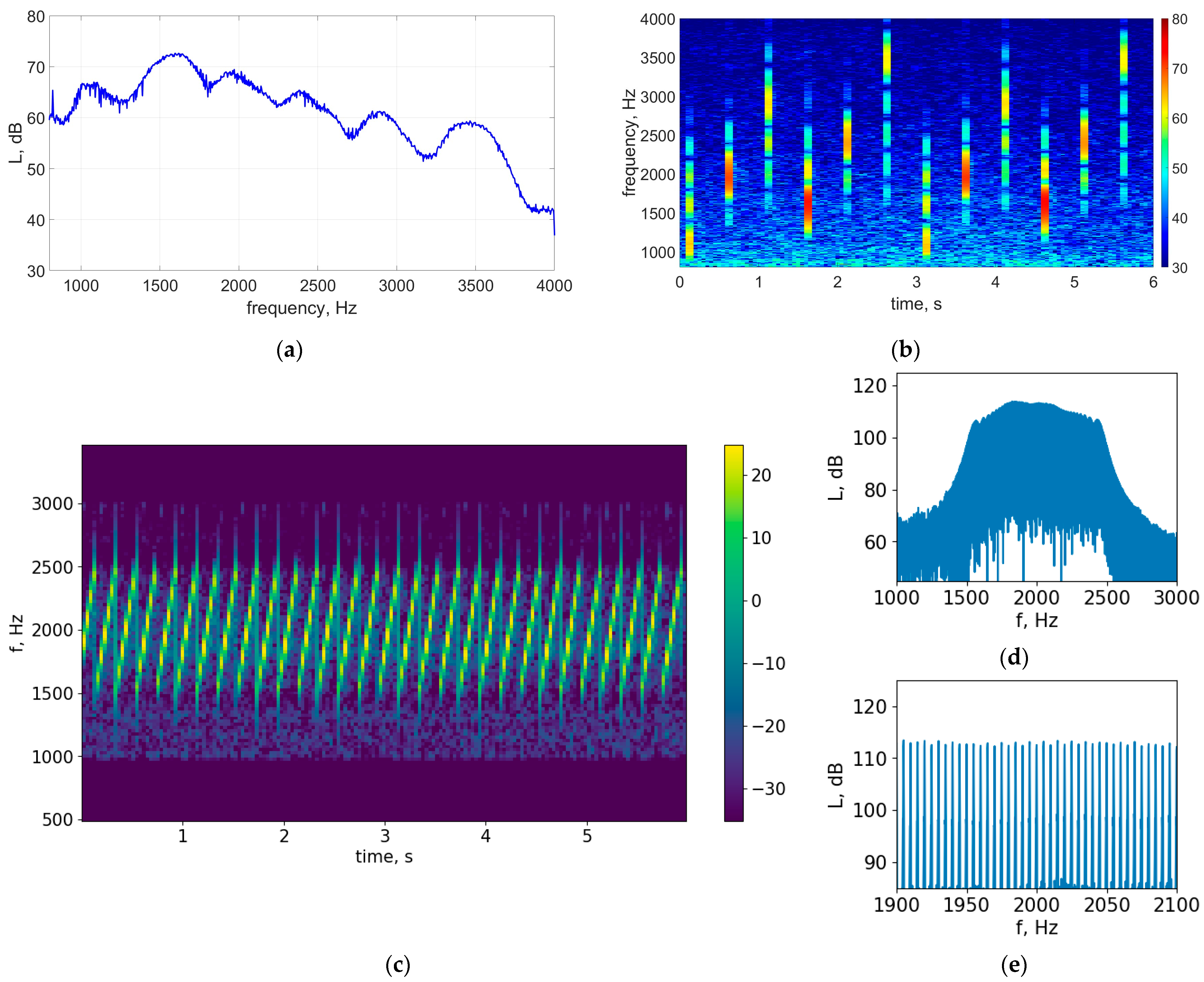
3.3. Narrowband Analysis of Surface Reverberation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| RV “AMK” | Research vessel “Akademik Mstislav Keldysh” |
| ADC | Analog-to-digital converter |
| PTFM | Pulse-train frequency-modulated signal |
References
- Mirza, J.; Kanwal, F.; Salaria, U.A.; Ghafoor, S.; Aziz, I.; Atieh, A.; Almogren, A.; Haq, A.U.; Kanwal, B. Underwater temperature and pressure monitoring for deep-sea SCUBA divers using optical techniques. Sec. Opt. Photonics 2024, 12, 1417293. [Google Scholar] [CrossRef]
- Joshi, B.; Xanthidis, M.; Roznere, M.; Burgdorfer, N.J.; Mordohai, P.; Li, A.Q.; Rekleitis, I. Underwater Exploration and Mapping. In Proceedings of the IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), Singapore, 19–21 September 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Charkin, A.N.; Kosobokova, K.N.; Ershova, E.A.; Syomin, V.L.; Kolbasova, G.D.; Semkin, P.Y.; Leusov, A.E.; Dudarev, O.V.; Gulenko, T.A.; Yaroshchuk, E.I.; et al. A unique warm–water oasis in the Siberian Arctic’s Chaun Bay sustained by hydrothermal groundwater discharge. Commun. Earth Environ. 2024, 5, 393. [Google Scholar] [CrossRef]
- Bjørnø, L. Chapter 5—Scattering of Sound. In Applied Underwater Acoustics; Neighbors, T.H., Bradley, D., Eds.; Elsevier: Amsterdam, The Netherlands, 2017; pp. 297–362. [Google Scholar] [CrossRef]
- Malekhanov, A.I.; Smirnov, I.P. Array acoustic signal processing in shallow-water channels under conditions of a priori uncertainty: Estimates of the efficiency loss. Acoust. Phys. 2022, 68, 382–394. [Google Scholar] [CrossRef]
- Li, P.; Wu, Y.; Guo, W.; Cao, C.; Ma, Y.; Li, L.; Leng, H.; Zhou, A.; Song, J. Striation-Based Beamforming with Two-Dimensional Filtering for Suppressing Tonal Interference. J. Mar. Sci. Eng. 2023, 11, 2117. [Google Scholar] [CrossRef]
- Dmitrieva, D.; Romasheva, N. Sustainable Development of Oil and Gas Potential of the Arctic and Its Shelf Zone: The Role of Innovations. J. Mar. Sci. Eng. 2020, 8, 1003. [Google Scholar] [CrossRef]
- Krylov, A.A.; Ananiev, R.A.; Chernykh, D.V.; Alekseev, D.A.; Balikhin, E.I.; Dmitrevsky, N.N.; Novikov, M.A.; Radiuk, E.A.; Domaniuk, A.V.; Kovachev, S.A.; et al. A Complex of Marine Geophysical Methods for Studying Gas Emission Process on the Arctic Shelf. Sensors 2023, 23, 3872. [Google Scholar] [CrossRef]
- Li, Z.; Yang, Y.; Wen, H.; Zhou, H.; Ruan, H.; Zhang, Y. The Extraction and Validation of Low-Frequency Wind-Generated Noise Source Levels in the Chukchi Plateau. J. Mar. Sci. Eng. 2025, 13, 49. [Google Scholar] [CrossRef]
- Brekhovskikh, L.M.; Godin, O.A. Acoustics of Layered Media I. Plane and Quasi-Plane Waves; Springer Series on Wave Phenomena; Springer: Berlin, Germany, 1990; Volume 5, 240p, ISBN 3-540-51038-9. [Google Scholar]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics; Springer: New York, NY, USA, 2011. [Google Scholar]
- Hassantabar Bozroudi, S.H.; Ciani, D.; Mohammad Mahdizadeh, M.; Akbarinasab, M.; Aguiar, A.C.B.; Peliz, A.; Chapron, B.; Fablet, R.; Carton, X. Effect of Subsurface Mediterranean Water Eddies on Sound Propagation Using ROMS Output and the Bellhop Model. Water 2021, 13, 3617. [Google Scholar] [CrossRef]
- Salin, M.B.; Ermoshkin, A.V.; Razumov, D.D.; Salin, B.M. Models of the formation of Doppler spectrum of surface reverberation for sound waves of the meter range. Acoust. Phys. 2023, 69, 687–698. [Google Scholar] [CrossRef]
- Isakson, M.J.; Chotiros, N.P. Finite element modeling of acoustic scattering from fluid and elastic rough interfaces. IEEE J. Ocean. Eng. 2015, 40, 475–484. [Google Scholar] [CrossRef]
- Ellis, D.D. Modelling Bottom Scattering and Target Echoes from Data Collected During the 2013 Target and Reverberation Experiment. In Proceedings of the UACE2017—4th Underwater Acoustics Conference and Exhibition, Skiathos, Greece, 3–8 September 2017; pp. 245–252. [Google Scholar]
- Tang, D.; Hefner, B.T.; Jackson, D.R. Direct-Path Backscatter Measurements Along the Main Reverberation Track of TREX13. IEEE J. Ocean. Eng. 2019, 44, 983. [Google Scholar] [CrossRef]
- Lunkov, A.A. Interference structure of low-frequency reverberation signals in shallow sea. Acoust. J. 2015, 61, 596–604. (In Russian) [Google Scholar] [CrossRef]
- Jenserud, T.; Ivansson, S. Measurements modeling of effects of out-of-plane reverberation on the power delay profile for underwater acoustic channels. IEEE J. Ocean. Eng. 2015, 40, 807–821. [Google Scholar] [CrossRef]
- Jung, Y.; Lee, K. Observation of the Relationship between Ocean Bathymetry and Acoustic Bearing-Time Record Patterns Acquired during a Reverberation Experiment in the Southwestern Continental Margin of the Ulleung Basin, Korea. J. Mar. Sci. Eng. 2021, 9, 1259. [Google Scholar] [CrossRef]
- Jung, Y.; Seong, W.; Lee, K.; Kim, S. A Depth-Bistatic Bottom Reverberation Model and Comparison with Data from an Active Triplet Towed Array Experiment. Appl. Sci. 2020, 10, 3080. [Google Scholar] [CrossRef]
- Isakson, M.J.; Chotiros, N.P. Finite element modeling of reverberation and transmission loss in shallow water waveguides with rough boundaries. J. Acoust. Soc. Am. 2011, 129, 1273–1279. [Google Scholar] [CrossRef]
- Urick, R.J. Principles of Underwater Sound; McGraw-Hill: New York, NY, USA, 1975. [Google Scholar]
- Samchenko, A.; Dolgikh, G.; Yaroshchuk, I.; Korotchenko, R.; Kosheleva, A. Geoacoustic Digital Model for the Sea of Japan Shelf (Peter the Great Bay). Geosciences 2024, 14, 288. [Google Scholar] [CrossRef]
- Sidorov, D.D.; Petnikov, V.G.; Lunkov, A.A. Broadband sound field in a shallow-water waveguide with a non-uniform bottom. Acoust. J. 2023, 69, 608–619. (In Russian) [Google Scholar] [CrossRef]
- Trzcinska, K.; Tegowski, J.; Pocwiardowski, P.; Janowski, L.; Zdroik, J.; Kruss, A.; Rucinska, M.; Lubniewski, Z.; Schneider von Deimling, J. Measurement of Seafloor Acoustic Backscatter Angular Dependence at 150 kHz Using a Multibeam Echosounder. Remote Sens. 2021, 13, 4771. [Google Scholar] [CrossRef]
- Hartstra, I.; Colin, M.; Prior, M. Active sonar performance modelling for Doppler-sensitive pulses. Proc. Meet. Acoust. 2021, 44, 022001. [Google Scholar] [CrossRef]
- Kalinina, V.I.; Vyugin, P.N.; Kapustin, I.A. Physical modeling of the method of coherent probing of low-contrast bottom layers in a laboratory pool. Acoust. Phys. 2024, 70, 536–550. [Google Scholar] [CrossRef]
- Salin, M.; Razumov, D. Multi-domain boundary element method for sound scattering on a partly perturbed water surface. J. Theor. Comput. Acoust. 2020, 28, 2050006. [Google Scholar] [CrossRef]
- Purdon, J. Calming the Waves: Using Legislation to Protect Marine Life from Seismic Surveys; South African Institute of International Affairs Policy Insights: Johannesburg, South Africa, 2018; Volume 58. [Google Scholar]
- Zuikova, E.M.; Baydakov, G.A.; Titchenko, Y.A.; Salin, M.B. 3 cm Doppler scatterometer with full polarization sensing. J. Radio Electron. 2021, 2021, 1–22. [Google Scholar] [CrossRef]
- Liu, Z.; Tao, Q.; Sun, W.; Fu, X. Deconvolved Fractional Fourier Domain Beamforming for Linear Frequency Modulation Signals. Sensors 2023, 23, 3511. [Google Scholar] [CrossRef]
- Ellis, D.D.; Crowe, D.V. Bistatic reverberation calculations using a three-dimensional scattering function. J. Acoust. Soc. Am. 1991, 89, 2207–2214. [Google Scholar] [CrossRef]
- Andreeva, I.B. Comparative assessments of surface, bottom and volume scattering of sound in the ocean. Acoust. J. 1995, 41, 699–705. Available online: http://www.akzh.ru/pdf/1995_5_699-705.pdf (accessed on 1 June 2025). (In Russian).
- Guo, R.; Wang, X.; Cai, Z. Comparison research on reverberation strength excited by PTFM and CW signals. In Proceedings of the IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1677–1681. [Google Scholar] [CrossRef]
- Guan, C.; Zhou, Z.; Zeng, X. Optimal waveform design using frequency-modulated pulse trains for active sonar. Sensors 2019, 19, 4262. [Google Scholar] [CrossRef]
- Ermoshkin, A.V.; Dosaev, A.S.; Razumov, D.D.; Tsvetkov, K.A.; Salin, M.B. Manifestation of the nonlinearity of wind waves in coherent remote sensing signals. Radiophys. Quantum Electron. 2025. in print. [Google Scholar]
- Baidakov, G.A.; Dosaev, A.S.; Razumov, D.D.; Salin, M.B. Estimation of broadening of the spectra of short surface waves in the presence of long waves. Radiophys. Quantum Electron. 2018, 61, 332–341. [Google Scholar] [CrossRef]
- Salin, M.B.; Potapov, O.A.; Salin, B.M.; Chashchin, A.S. Measuring the characteristics of backscattering of sound on a rough surface in the near-field zone of a phased array. Acoust. Phys. 2016, 62, 74–88. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kosteev, D.A.; Ermoshkin, A.V.; Kalinina, V.I.; Salin, M.B. An Investigation of Reverberation Received by a Vertical Antenna at Short Ranges in Shallow Seas. J. Mar. Sci. Eng. 2025, 13, 1122. https://doi.org/10.3390/jmse13061122
Kosteev DA, Ermoshkin AV, Kalinina VI, Salin MB. An Investigation of Reverberation Received by a Vertical Antenna at Short Ranges in Shallow Seas. Journal of Marine Science and Engineering. 2025; 13(6):1122. https://doi.org/10.3390/jmse13061122
Chicago/Turabian StyleKosteev, Dmitry A., Alexey V. Ermoshkin, Vera I. Kalinina, and Mikhail B. Salin. 2025. "An Investigation of Reverberation Received by a Vertical Antenna at Short Ranges in Shallow Seas" Journal of Marine Science and Engineering 13, no. 6: 1122. https://doi.org/10.3390/jmse13061122
APA StyleKosteev, D. A., Ermoshkin, A. V., Kalinina, V. I., & Salin, M. B. (2025). An Investigation of Reverberation Received by a Vertical Antenna at Short Ranges in Shallow Seas. Journal of Marine Science and Engineering, 13(6), 1122. https://doi.org/10.3390/jmse13061122