
Unified Underwater Communication Positioning Navigation and Timing Network System Design and Application


 ,
,
Abstract
1. Introduction
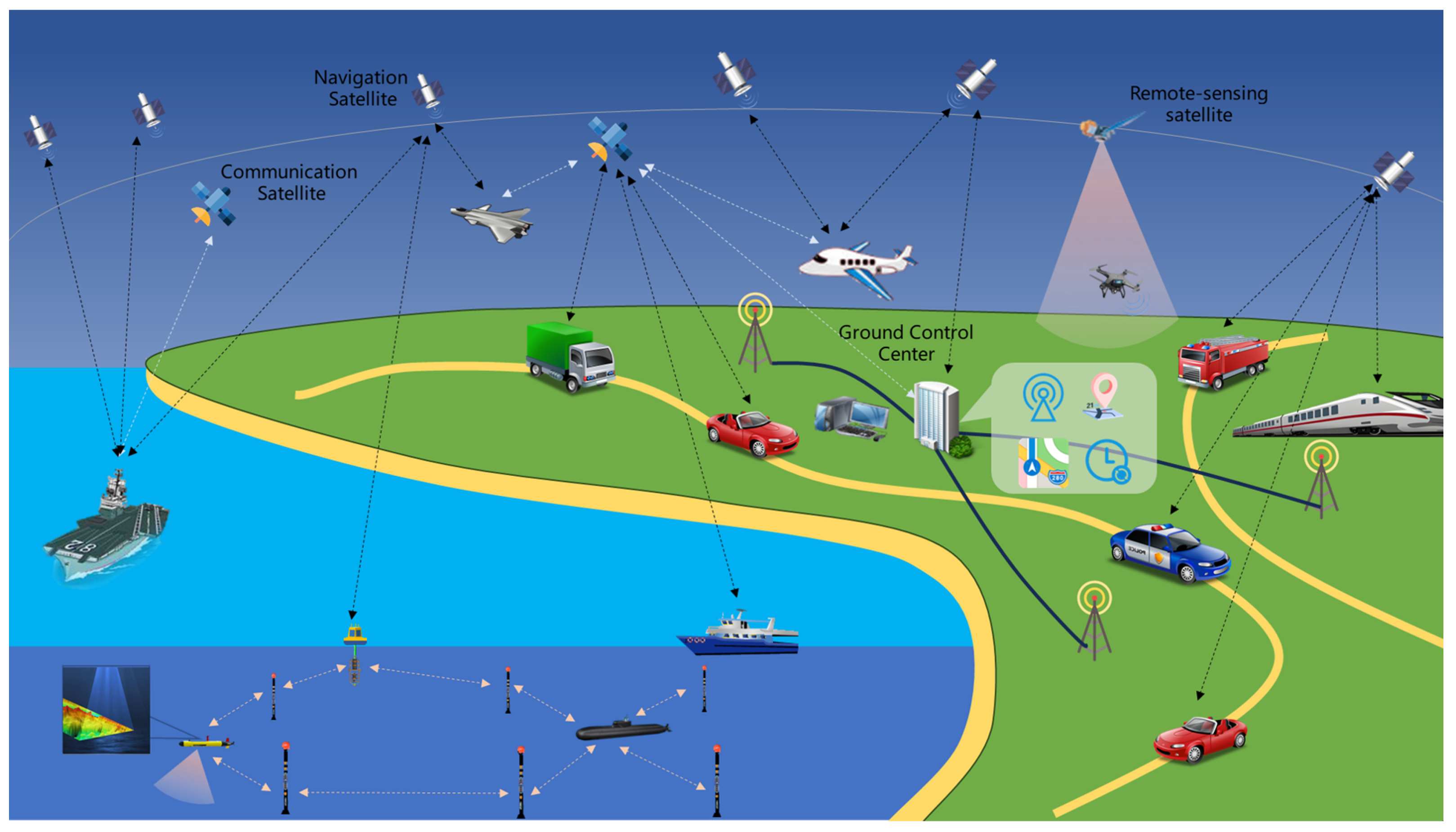
- Since the magnetic wave, the main information carrier of the current PNT system, is unable to propagate far in water because of energy absorption, scattering, and seawater conductivity [5,6], the traditional PNT system cannot work properly underwater. In addition, as a new application field, more systematic research and implementation of the underwater PNT system are needed.
- Sound, a mechanical wave, has been demonstrated to be the sole medium capable of propagating over long distances underwater [7]. Several issues are associated with the acoustic channel, including restricted bandwidth, prolonged latency, dynamic time-space properties, and significant Doppler effect [4].
- Due to the low communication rate, the design of CPNT signals presents a considerable challenge to maximize the use of communication resources.
- Assessment and performance boundary analysis for integrated multifunction acoustic network systems lack systematic theoretical support.
- Given the high costs of sea trials, most analyses are simulation-based, which poses difficulties in accessing experimental data from actual sea trials.
- The design of the unified system architecture for the underwater CPNT system has been carried out.
- A CPNT network performance analysis model based on the Cramér–Rao bound was established.
- The improved performance of the network system in CPNT utilizing the model designed above has been illustrated.
- The results of theoretical analysis, simulation, and sea trials are compared, confirming their effectiveness.
2. Related Work
3. Key Challenges
3.1. Underwater Communication
3.2. Localization
3.3. Networking
3.4. Integrated Design
4. Overall Design and System Analysis
4.1. System Overall Design
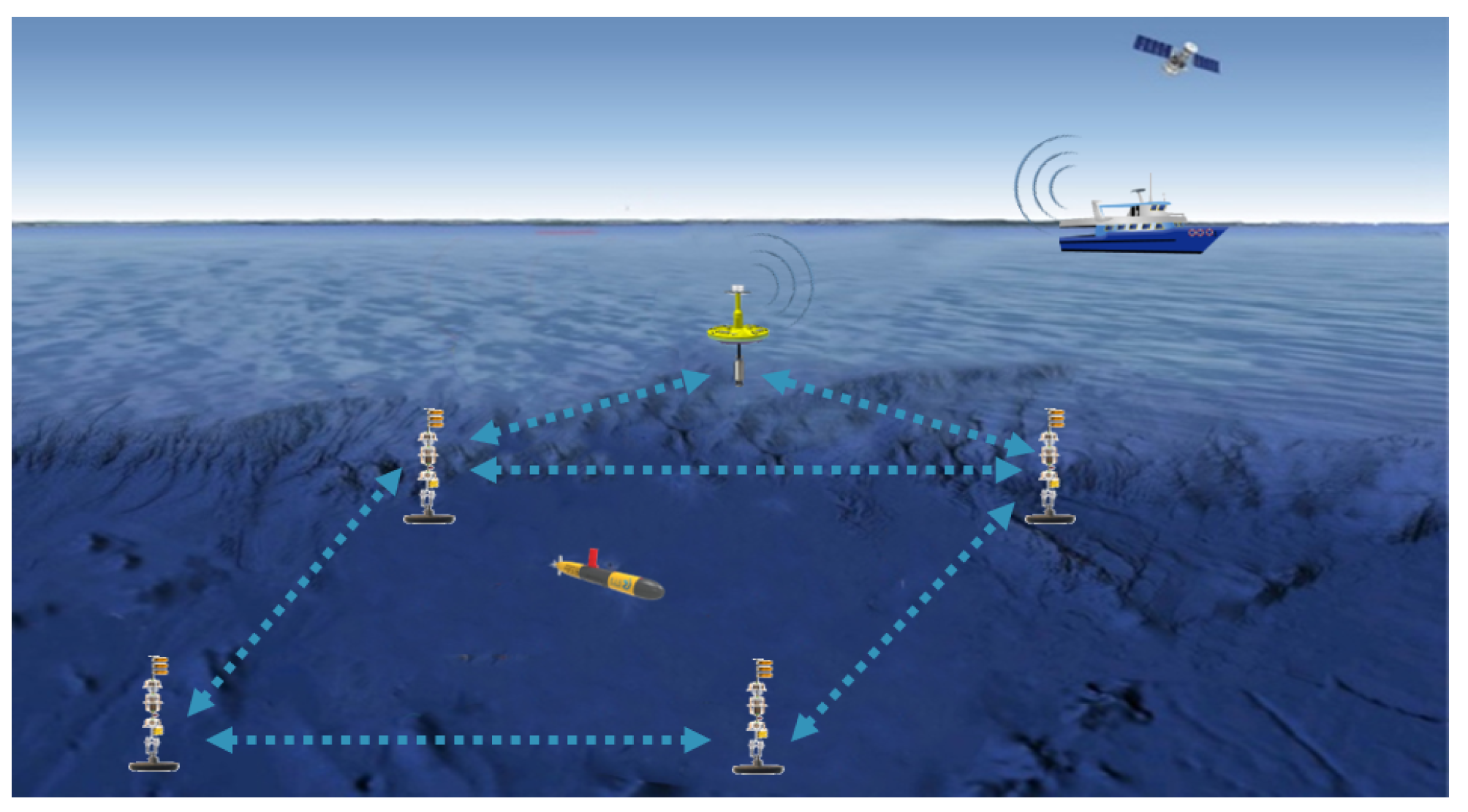
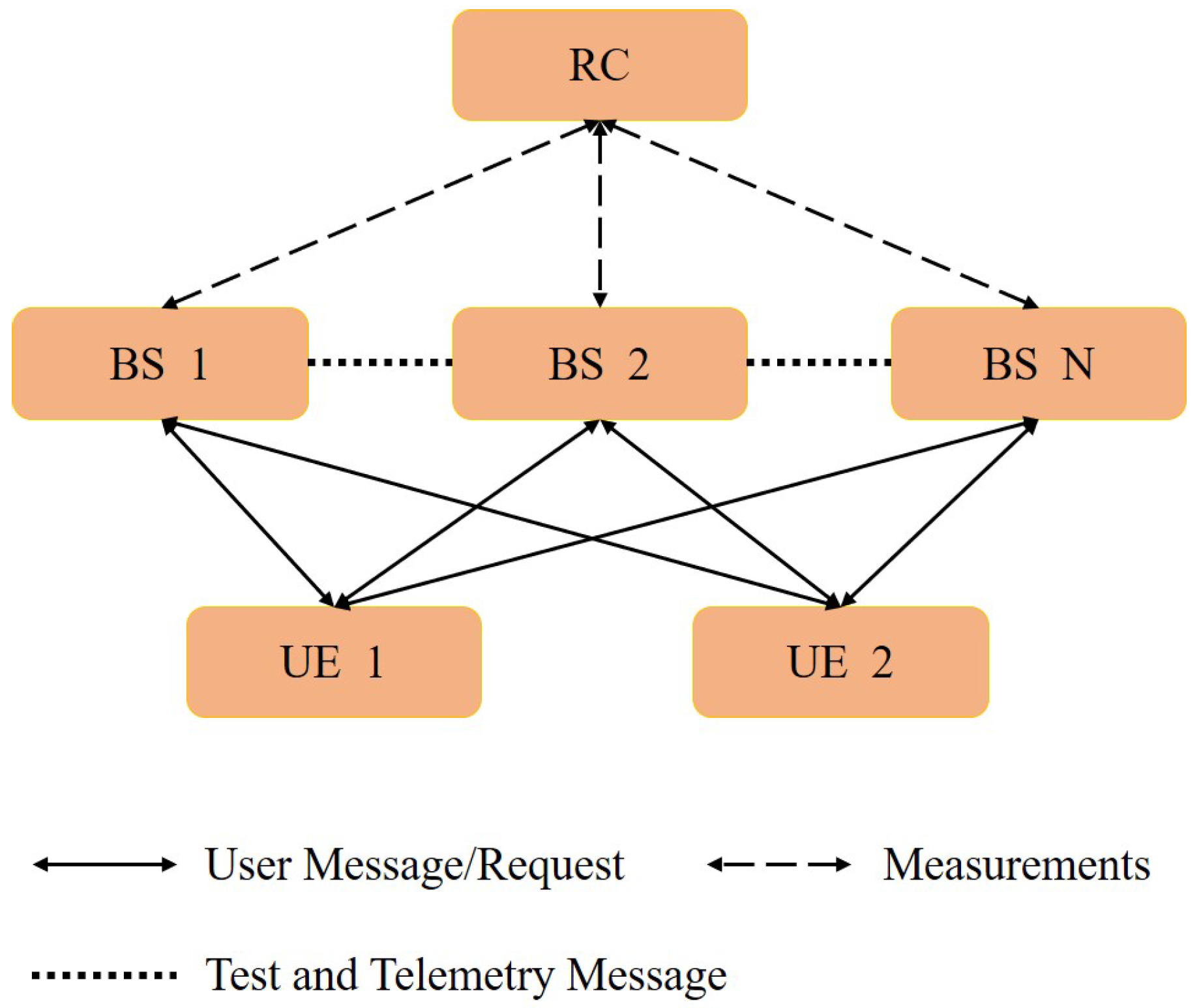
- During the positioning process, as the underwater targets pass through the deployment area, the subsurface buoys will receive beacon signals and transmit the signal to the surface control center. If the signal is received by more than four buoys with the same time label, the surface control center will be able to calculate the target’s position and transmit it to underwater vehicles;
- The positioning calculation can be performed on underwater targets if they possess the position information of the buoys;
- During the communication process, both upstream and downstream information flow through the link alongside with the positioning signal between the surface control center and underwater moving targets.
- Definitionis an underwater network system that is able to provide an integrated CPNT service for underwater fixed or mobile nodes.
- System CompositionA system consists of subsurface buoys (base station), moving targets (beacons), and a surface control center.
- System FunctionsA system possesses the following functions:
- Providing information transmission service through underwater acoustic communication network;
- Providing positioning and tracking service for underwater moving targets;
- Providing position and time calibration service for underwater equipment.
- System SupportTo ensure the reliability and performance of the system, several supporting measures are needed:
- Subsurface buoy position calibration during deployment and working phase;
- Subsurface buoy status monitoring during whole system lifetime.
System Advantages
4.2. Theoretical Analysis
4.2.1. Overview
4.2.2. Theoretical Basis Derivation
- Communication Rate RAcoustic communication is the foundation for underwater positioning, and a higher communication rate allows more aided positioning information to be transmitted, such as the depth of the platform where the beacon is installed, speed, acceleration, attitude and some other parameters to help improve the accuracy of position estimation. Assuming that the higher the communication rate R, the lower the variance of measured noise is:
- ReliabilityReliability will affect the packet loss rate and number of retransmissions, which will influence the effectiveness and accuracy of the measurement. Assuming that the higher the reliability, the lower the variance of measured noise is:
- Communication Distance DAs communication distance increases, signal attenuation and noise increase, and multi-path effect is more obvious, which will affect measurement accuracy. Assuming that the measurement noise is proportional to communication distance:
- Timing Accuracy TTiming service will directly affect the accuracy of measured time difference. And the higher the accuracy, the lower the variance of measured noise:According to the above analysis, the variance of measured noise can be represented as:is the proportional coefficient.We utilize Fisher Information Matrix (FIM) to calculate CRLB, and elements of FIM of TDOA positioning system can be represented as:With substituted, we obtain
4.3. System Implementation
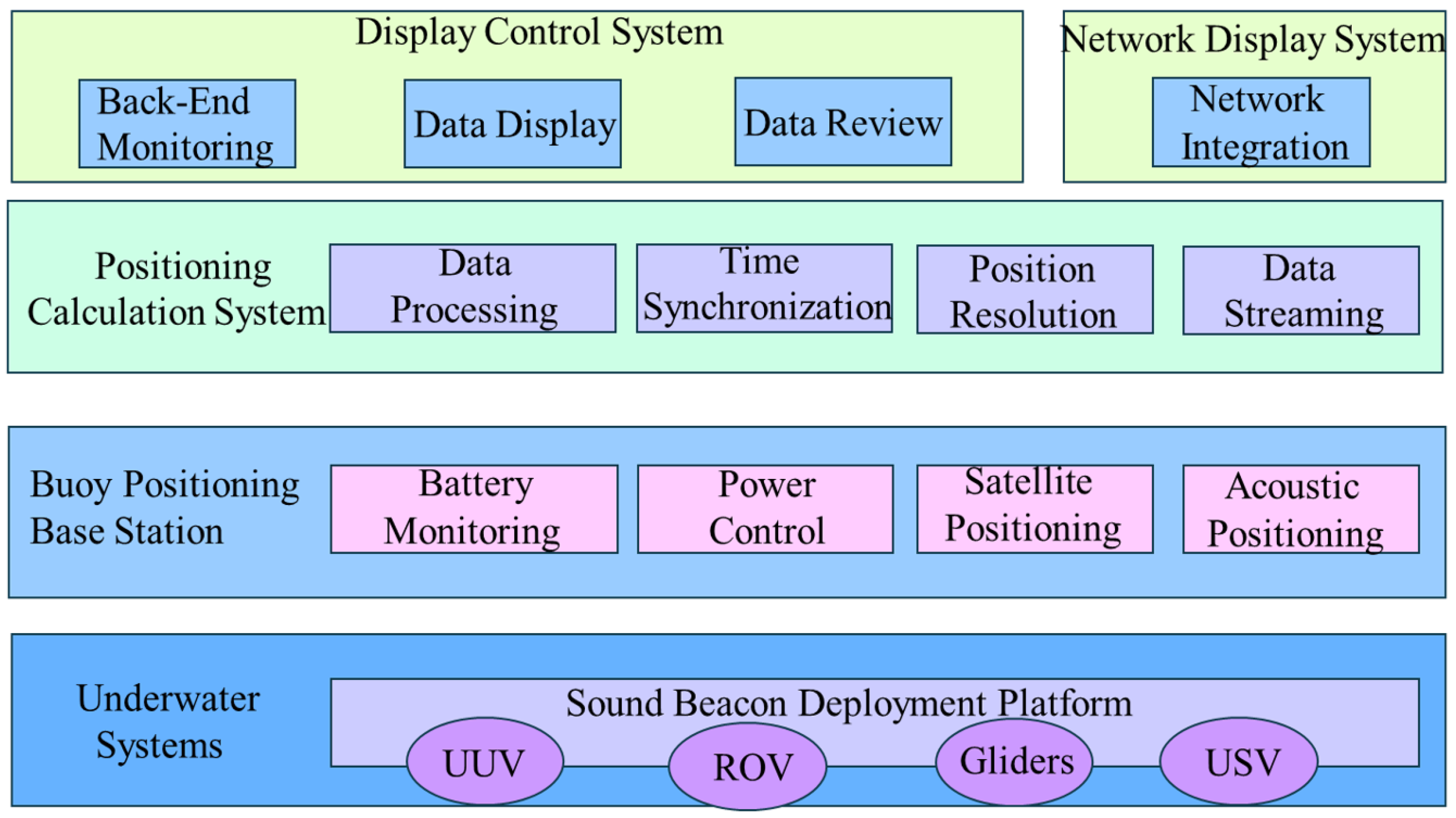
4.3.1. System Framework Design
4.3.2. Integrated Signal Design
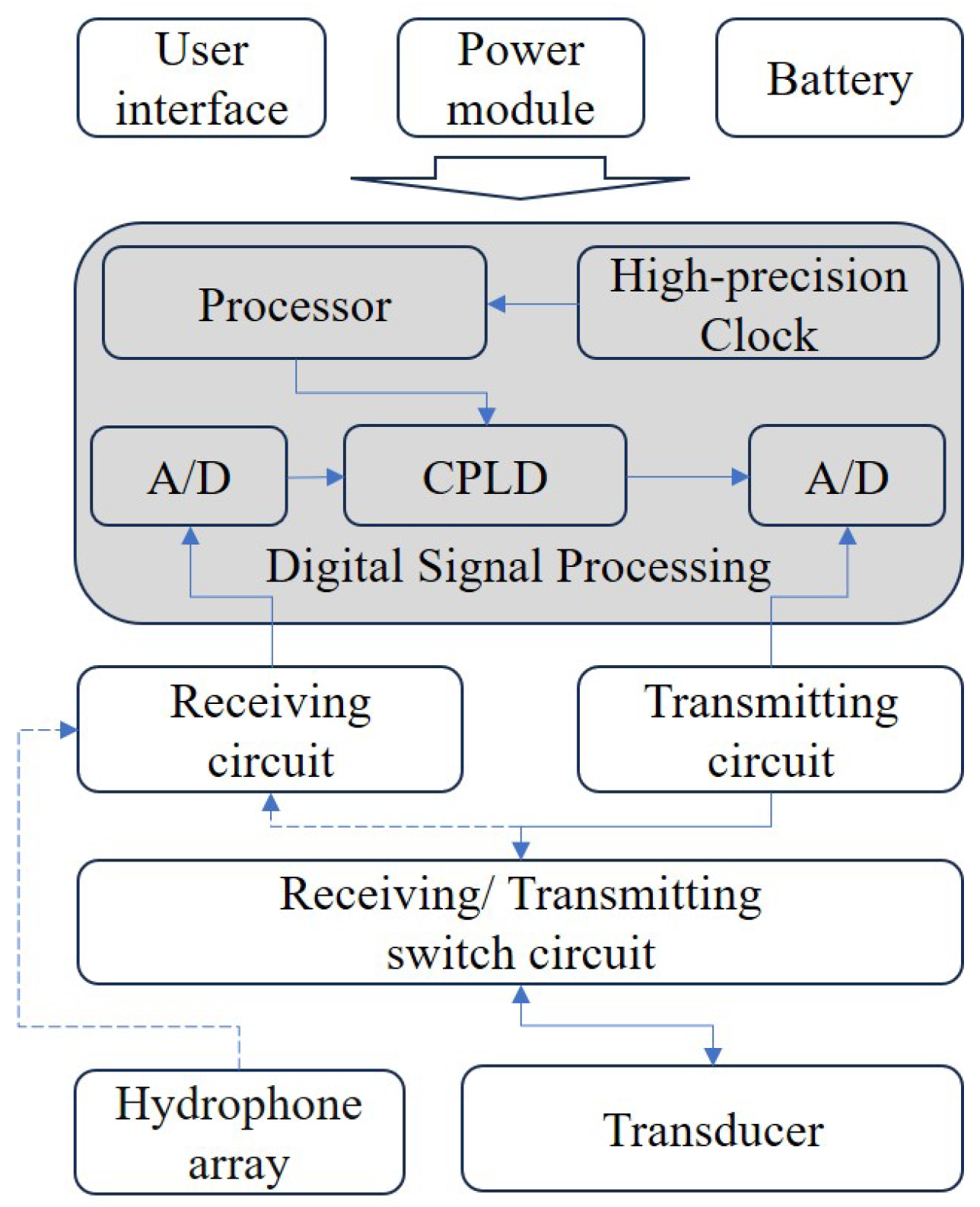
4.3.3. Integrated Hardware and Software Design
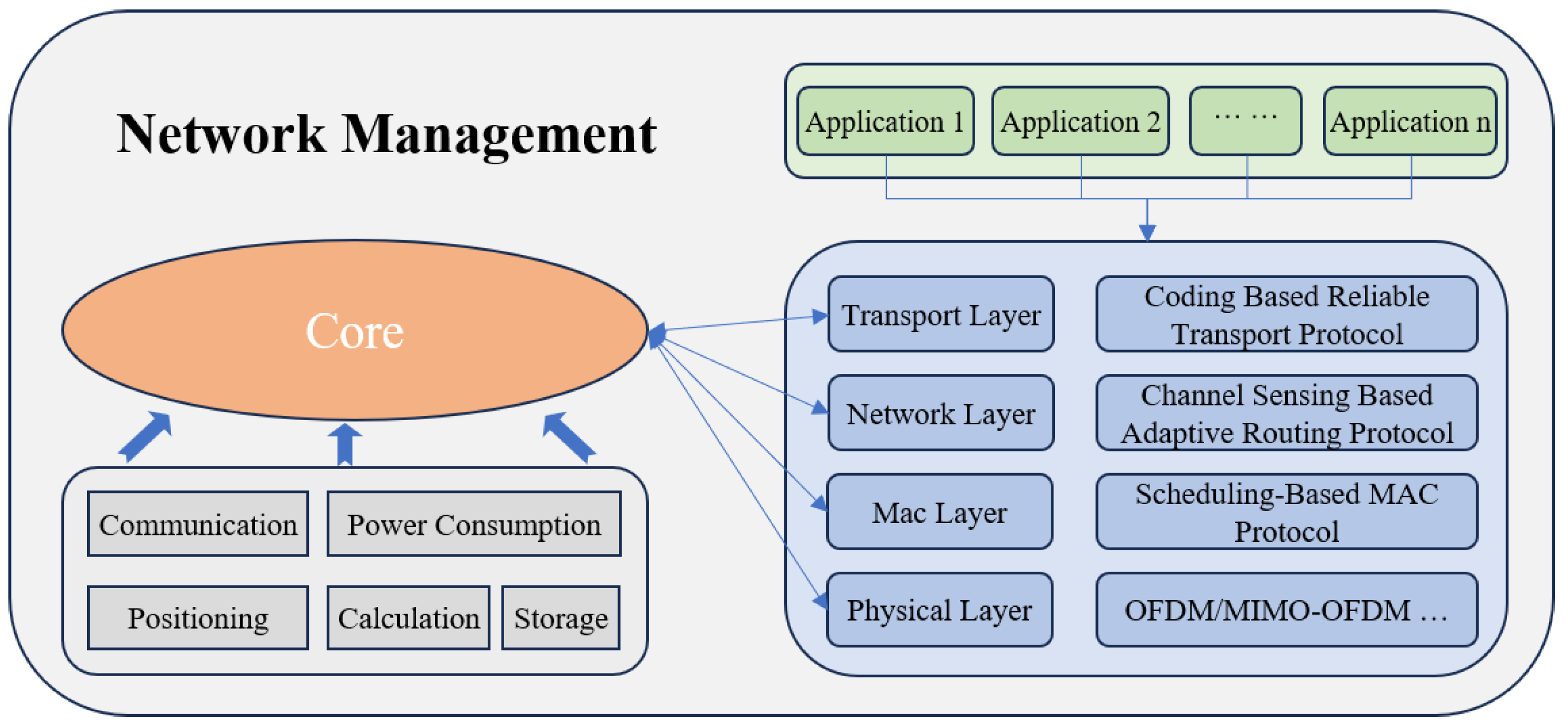
4.3.4. Network Management
5. Case Study
5.1. Architecture and Implementation of the System
5.2. System Brief
5.3. Experiment Results
5.3.1. Time Synchronization
5.3.2. Depth Information Transmission
5.3.3. Velocity Estimation
6. Discussion
7. Conclusions
- The theoretical analysis based on the Cramér-Rao bound illustrates the feasibility of the unified architecture, demonstrating that, along with an increase in communication rate, reliability, and timing accuracy, measured noise can be reduced.
- The integrated design combines the CPNT service together, while it can effectively reduce hardware and software redundancy. A real system was constructed and the results of the sea trial indicate that the implemented system can provide an integrated CPNT service under the designed framework.
- We investigate the key performance parameters of positioning and navigation. We evaluated the localization error under two distinct timing drift conditions, with variance 1.671 when equals to 1 × 10−3 and variance 0.501 for 1 × 10−4 respectively. The results reveal that larger localization errors are primarily induced by more significant timing errors. We take the depth information transmission as an application of communication, and realize the calculation of position with 3 beacons, improving the positioning continuity by 7.68%. For velocity estimation, which is an important parameter in navigation service, the velocity estimation error is less than 1 m/s, with angle error less than 30°, proving the navigation capability of our system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Deployment analysis in underwater acoustic wireless sensor networks. In Proceedings of the 1st International Workshop on Underwater Networks, Los Angeles, CA, USA, 25 September 2006; pp. 48–55. [Google Scholar]
- Wang, Z.; Wei, L.; Lu, X.; Peng, Z.; Cui, J.H. Towards power efficient deployment for underwater sensing systems. In Proceedings of the 2015 IEEE 12th International Conference on Networking, Sensing and Control, Taipei, Taiwan, China, 9–11 April 2015; pp. 625–630. [Google Scholar]
- Li, Z.; Chitre, M.; Stojanovic, M. Underwater acoustic communications. Nat. Rev. Electr. Eng. 2024, 83–95. [Google Scholar] [CrossRef]
- Cui, J.H.; Kong, J.; Gerla, M.; Zhou, S. The challenges of building mobile underwater wireless networks for aquatic applications. IEEE Netw. 2006, 20, 12–18. [Google Scholar]
- Kawamura, T.; Matsushita, T.; Kaneko, Y.; Kawai, N.; Matsui, Y.; Horii, A.; Yoshida, H. Conceptual Design and Propagation Characteristics of an Underwater Electromagnetic Communication System for Ocean Environment Sensor Systems. In Proceedings of the 2024 18th European Conference on Antennas and Propagation (EuCAP), Glasgow, UK, 17–20 March 2024; pp. 1–5. [Google Scholar]
- Goh, J.H.; Shaw, A.; Al-Shamma’a, A.I. Underwater wireless communication system. J. Phys. Conf. Ser. 2009, 178, 012029. [Google Scholar] [CrossRef]
- Boukerche, A.; Sun, P. Design of algorithms and protocols for underwater acoustic wireless sensor networks. ACM Comput. Surv. (CSUR) 2020, 53, 1–34. [Google Scholar] [CrossRef]
- Reinhart, R. Lunar Communications and Navigation: Lunar Communications, Position, Navigation, and Time (CPNT) Architecture. In Proceedings of the Glenn Space Technology Symposium, Cleveland, OH, USA, 15–17 July 2024. [Google Scholar]
- Gola, K.K.; Arya, S. Underwater acoustic sensor networks: Taxonomy on applications, architectures, localization methods, deployment techniques, routing techniques, and threats: A systematic review. Concurr. Comput. Pract. Exp. 2023, 35, e7815. [Google Scholar] [CrossRef]
- Pu, W. A survey of localization techniques for underwater wireless sensor networks. J. Comput. Electron. Inf. Manag. 2023, 11, 10–15. [Google Scholar] [CrossRef]
- Igbinenikaro, O.P.; Adekoya, O.O.; Etukudoh, E.A. A comparative review of subsea navigation technologies in offshore engineering projects. Int. J. Front. Eng. Technol. Res. 2024, 6, 019–034. [Google Scholar] [CrossRef]
- Sameer Babu, T.P.; Ameer, P.M.; David Koilpillai, R. Synchronization techniques for underwater acoustic communications. Int. J. Commun. Syst. 2023, 36, e5563. [Google Scholar] [CrossRef]
- Giordano, P.; Malman, F.; Swinden, R.; Zoccarato, P.; Ventura-Traveset, J. The Lunar Pathfinder PNT experiment and Moonlight navigation service: The future of lunar position, navigation and timing. In Proceedings of the 2022 International Technical Meeting of The Institute of Navigation, Long Beach, CA, USA, 25–27 January 2022; pp. 632–642. [Google Scholar]
- Lilley, R.; Erikson, R. DME/DME for alternate position, navigation, and timing (APNT). APNT White Paper, August, 2012. Available online: https://www.faa.gov/sites/faa.gov/files/about/office_org/headquarters_offices/ato/20120723APNT_DMEWhitePaper_dc.pdf (accessed on 28 May 2025).
- Lo, S.; Chen, Y.H.; Enge, P.; Peterson, B.; Erikson, R.; Lilley, R. Distance measuring equipment accuracy performance today and for future alternative position navigation and timing (APNT). In Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, TN, USA, 16–20 September 2013; pp. 711–721. [Google Scholar]
- Lo, S.C.; Peterson, B.; Akos, D.; Narins, M.; Loh, R.; Enge, P. Alternative position navigation & timing (APNT) based on existing DME and UAT ground signals. In Proceedings of the 24th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 19–23 September 2011; pp. 3309–3317. [Google Scholar]
- Han, S.; Gong, Z.; Meng, W.; Li, C.; Gu, X. Future alternative positioning, navigation, and timing techniques: A survey. IEEE Wirel. Commun. 2016, 23, 154–160. [Google Scholar] [CrossRef]
- Zhang, T.; Han, G.; Lin, C.; Guizani, N.; Li, H.; Shu, L. Integration of communication, positioning, navigation and timing for deep-sea vehicles. IEEE Netw. 2020, 34, 121–127. [Google Scholar] [CrossRef]
- Pan, X.; Liu, M.; Zhu, J.; Huo, L.; Peng, Z.; Liu, J.; Cui, J.H. RAP-MAC: A Robust and Adaptive Pipeline MAC Protocol for Underwater Acoustic String Networks. Remote Sens. 2024, 16, 2195. [Google Scholar] [CrossRef]
- Gou, Y.; Zhang, T.; Yang, T.; Liu, J.; Song, S.; Cui, J.H. A deep MARL-based power-management strategy for improving the fair reuse of UWSNs. IEEE Internet Things J. 2022, 10, 6507–6522. [Google Scholar] [CrossRef]
- Zhu, J.; Pan, X.; Peng, Z.; Liu, M.; Guo, J.; Zhang, T.; Gou, Y.; Cui, J.H. A uw-cellular network: Design, implementation and experiments. J. Mar. Sci. Eng. 2023, 11, 827. [Google Scholar] [CrossRef]
- Zhu, J.; Pan, X.; Peng, Z.; Liu, M.; Guo, J.; Cui, J.H. uw-wifi: Small-scale data collection network-based underwater internet of things. J. Mar. Sci. Eng. 2024, 12, 481. [Google Scholar] [CrossRef]
- Pan, X.; Zhu, J.; Liu, M.; Wang, X.; Peng, Z.; Liu, J.; Cui, J. An on-demand scheduling-based MAC protocol for UW-WiFi networks. J. Mar. Sci. Eng. 2023, 11, 765. [Google Scholar] [CrossRef]
- Zhang, T.; Gou, Y.; Liu, J.; Yang, T.; Cui, J.H. UDARMF: An underwater distributed and adaptive resource management framework. IEEE Internet Things J. 2021, 9, 7196–7210. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Alraie, H.; Alahmad, R.; Ishii, K. Double the data rate in underwater acoustic communication using OFDM based on subcarrier power modulation. J. Mar. Sci. Technol. 2024, 29, 457–470. [Google Scholar] [CrossRef]
- Mary, D.; Ko, E.; Yoon, D.; Shin, S.; Park, S. Energy Optimization Techniques in Underwater Internet of Things: Issues, State-of-the-Art, and Future Directions. Water 2022, 14, 3240. [Google Scholar] [CrossRef]
- Khalil, R.; Saeed, N.; Babar, M.; Jan, T.; Din, S. Bayesian Multidimensional Scaling for Location Awareness in Hybrid-Internet of Underwater Things. IEEE/CAA J. Autom. Sin. 2021, 9, 496–509. [Google Scholar] [CrossRef]
- Mostafa, M.; Esmaiel, H.; Mohamed, E. A comparative study on underwater communications for enabling C/U plane splitting based hybrid UWSNs. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference, Austin, TX, USA, 10–13 April 2018. [Google Scholar]
- Hanson, F.; Radic, S. High bandwidth underwater optical communication. Appl. Opt. 2008, 47, 277–283. [Google Scholar] [CrossRef] [PubMed]
- Gulbahar, B.; Akan, O.B. A communication theoretical modeling and analysis of underwater magneto-inductive wireless channels. IEEE Trans. Wirel. Commun. 2012, 11, 3326–3334. [Google Scholar] [CrossRef]
- Gussen, C.M.; Diniz, P.S.; Campos, M.L.; Martins, W.A.; Costa, F.M.; Gois, J.N. A survey of underwater wireless communication technologies. J. Commun. Inf. Sys. 2016, 31, 242–255. [Google Scholar] [CrossRef]
- Han, S.; Noh, Y.; Liang, R.; Chen, R.; Cheng, Y.J.; Gerla, M. Evaluation of underwater optical-acoustic hybrid network. China Commun. 2014, 11, 49–59. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Theocharidis, T.; Kavallieratou, E. Underwater communication technologies: A review. Telecommun. Syst. 2025, 88, 54. [Google Scholar] [CrossRef]
- Boukerche, A.; Oliveira, H.; Nakamura, E.; Loureiro, A. Localization systems for wireless sensor networks. IEEE Wirel. Commun. 2007, 14, 6–12. [Google Scholar] [CrossRef]
- Saeed, N.; Çelik, A.; Al-Naffouri, T.; Alouini, M. Energy Harvesting Hybrid Acoustic-Optical Underwater Wireless Sensor Networks Localization. Sensors 2017, 18, 51. [Google Scholar] [CrossRef]
- Donovan, G. Position Error Correction for an Autonomous Underwater Vehicle Inertial Navigation System (INS) Using a Particle Filter. IEEE J. Ocean. Eng. 2012, 37, 431–445. [Google Scholar] [CrossRef]
- Montanari, A.; Campagnaro, F.; Zorzi, M. An adaptive MAC-agnostic ranging scheme for underwater acoustic mobile networks. Comput. Netw. 2024, 247, 110430. [Google Scholar] [CrossRef]
- Sathish, K.; Chinthaginjala, R.; Kim, W.; Rajesh, A.; Corchado, J.; Abbas, M. Underwater Wireless Sensor Networks with RSSI-Based Advanced Efficiency-Driven Localization and Unprecedented Accuracy. Sensors 2023, 23, 6973. [Google Scholar] [CrossRef] [PubMed]
- Qin, Y.; Liu, H.; Yin, R.; Dong, M.; Zhao, S.; Deng, Y. Robust multi-model mobile target localization scheme based on underwater acoustic sensor networks. Ocean. Eng. 2023, 291, 116441. [Google Scholar] [CrossRef]
- Liu, F.; Chen, H.; Li, Y.; Xie, L. Virtual-network-reconstruction-based underwater acoustic localization framework: Theory and experiment validation. Ocean. Eng. 2024, 297, 117114. [Google Scholar] [CrossRef]
- Guo, J.; Song, S.; Liu, J.; Wan, L.; Yu, Y.; Han, G. An MC-CDMA-based MAC Protocol for Efficient Concurrent Communication in Mobile Underwater Acoustic Networks. IEEE Trans. Mob. Comput. 2024, 23, 12428–12443. [Google Scholar] [CrossRef]
- Ullah, I.; Chen, J.; Su, X.; Esposito, C.; Choi, C. Localization and Detection of Targets in Underwater Wireless Sensor Using Distance and Angle Based Algorithms. IEEE Access 2019, 7, 45693–45704. [Google Scholar] [CrossRef]
- Khan, H.; Hassan, S.; Jung, H. On Underwater Wireless Sensor Networks Routing Protocols: A Review. IEEE Sens. J. 2020, 20, 10371–10386. [Google Scholar] [CrossRef]
- Le, S.N.; Peng, Z.; Cui, J.H.; Zhou, H.; Liao, J. Sealinx: A multi-instance protocol stack architecture for underwater networking. In Proceedings of the 8th International Conference on Underwater Networks & Systems, Kaohsiung, Taiwan, China, 11–13 November 2013; pp. 1–5. [Google Scholar]
- Liu, J.; Yu, M.; Wang, X.; Liu, Y.; Wei, X.; Cui, J. RECRP: An Underwater Reliable Energy-Efficient Cross-Layer Routing Protocol. Sensors 2018, 18, 4148. [Google Scholar] [CrossRef]
- Su, Y.; Fan, R.; Jin, Z. ORIT: A Transport Layer Protocol Design for Underwater DTN Sensor Networks. IEEE Access 2019, 7, 69592–69603. [Google Scholar] [CrossRef]
- Wang, K.; Gao, H.; Xu, X.; Jiang, J.; Yue, D. An Energy-Efficient Reliable Data Transmission Scheme for Complex Environmental Monitoring in Underwater Acoustic Sensor Networks. IEEE Sens. J. 2015, 16, 4051–4062. [Google Scholar] [CrossRef]
- Liu, Z.; Liang, Z.; Yuan, Y.; Chan, K.; Guan, X. Energy-Efficient Data Collection Scheme Based on Value of Information in Underwater Acoustic Sensor Networks. IEEE Internet Things J. 2024, 11, 18255–18265. [Google Scholar] [CrossRef]
- Yan, J.; Guan, X.; Yang, X.; Chen, C.; Luo, X. A Survey on Integration Design of Localization, Communication and Control for Underwater Acoustic Sensor Networks. IEEE Internet Things J. 2025, 12, 6300–6324. [Google Scholar] [CrossRef]
- Wang, G.; Zhu, J.; Hu, S.; Peng, Z.; Cui, J.H. An Asynchronous Multi-Cluster Network System for AUV Swarm Communication and Positioning: Design and Trial. IEEE Internet Things J. 2025. [Google Scholar] [CrossRef]
- Liu, M.; Zhu, J.; Pan, X.; Wang, G.; Liu, J.; Peng, Z.; Cui, J.H. A distributed intelligent buoy system for tracking underwater vehicles. J. Mar. Sci. Eng. 2023, 11, 1661. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Acoustic Communication | Radio Wave Communication |
|---|---|---|
| Propagation Speed [31] | 1500 m/s | 3 × 108 m/s |
| Drawbacks [32] | Doppler, latency and shadow zones | High attenuation |
| Reliable Communication Distance [32] | Kilometers | Few meters |
| Energy Efficiency | low energy-efficiency (≈100 bits/Joule for several km) [33] | ≈9850 bits/Joule for 10 m range [31] |
| Data Rate [32] | 1.5 to 50 kbps (@0.5 km); 0.6 to 3.0 kbps (@28–120 km) | 1 to 10 Mbps (@1–2 m); 50 to 100 bps (@200 m) |
| Bandwidth | 100 kHz (<1 kHz for very long distance, >100 kHz for very short distance) [34] | 3–30 MHz [35] |
| Communication | Positioning | |
|---|---|---|
| Dual-HFM | Signal Detection, Synchronization | Estimation of Signal Arrival Times |
| CP-OFDM | Delivery of Communication Aiding Information | Delivery of Positioning Aiding Information |
| ZP-OFDM | Carrying Communication Data Payloads | Carrying Node Position Information |
| Parameter | Value |
|---|---|
| Carrier frequency | 24 kHz |
| Bandwidth | 6 kHz |
| Sampling rate | 96 kHz |
| 37 ms | |
| 5.3 ms | |
| 290.6 ms | |
| 170.6 ms | |
| 150 ms | |
| (CP-/ZP-OFDM) Number of sub-carriers | 1024/1024 |
| (CP-/ZP-OFDM) Number of data-carriers | 224/672 |
| (CP-/ZP-OFDM) Number of pilots | 672/256 |
| (CP-/ZP-OFDM) Number of null sub-carriers | 128/96 |
| Mean (w/o Skew) | Variance (w/o Skew) | Mean (with Skew) | Variance (with Skew) | |
|---|---|---|---|---|
| 1 × 10−3 | 2.361 | 0.490 | 2.764 | 1.671 |
| 1 × 10−4 | 2.361 | 0.490 | 2.362 | 0.501 |
| Total Points | 3 Points Positioning | 4 Points Positioning | Continuity Enhancement |
|---|---|---|---|
| 729 | 677 | 52 | 7.68% |
| Communication | Positioning | Navigation | Timing | Networking | System Implementation | |
|---|---|---|---|---|---|---|
| ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Underwater acoustic sensor networks [9] | ✓ | ✓ | ✓ | |||
| Underwater localization [10] | ✓ | ✓ | ||||
| Subsea navigation technologies [11] | ✓ | ✓ | ||||
| Underwater timing techniques [12] | ✓ | ✓ | ||||
| PNT and Moonlight navigation [13] | ✓ | ✓ | ✓ | ✓ | ||
| APNT [14,15,16,17] | ✓ | ✓ | ✓ | ✓ | ||
| Integration of CPNT for deep-sea vehicles [18] | ✓ | ✓ | ✓ | ✓ | ||
| Adaptive Pipeline MAC Protocol [19] | ✓ | ✓ | ✓ | |||
| An on-demand scheduling-based MAC protocol [23] | ✓ | ✓ | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huo, L.; Liu, M.; Wen, H.; Peng, Z.; Liu, Y.; Guo, X.; Cui, J.-H. Unified Underwater Communication Positioning Navigation and Timing Network System Design and Application. J. Mar. Sci. Eng. 2025, 13, 1094. https://doi.org/10.3390/jmse13061094
Huo L, Liu M, Wen H, Peng Z, Liu Y, Guo X, Cui J-H. Unified Underwater Communication Positioning Navigation and Timing Network System Design and Application. Journal of Marine Science and Engineering. 2025; 13(6):1094. https://doi.org/10.3390/jmse13061094
Chicago/Turabian StyleHuo, Lipeng, Mengzhuo Liu, Heng Wen, Zheng Peng, Yusha Liu, Xiaoxin Guo, and Jun-Hong Cui. 2025. "Unified Underwater Communication Positioning Navigation and Timing Network System Design and Application" Journal of Marine Science and Engineering 13, no. 6: 1094. https://doi.org/10.3390/jmse13061094
APA StyleHuo, L., Liu, M., Wen, H., Peng, Z., Liu, Y., Guo, X., & Cui, J.-H. (2025). Unified Underwater Communication Positioning Navigation and Timing Network System Design and Application. Journal of Marine Science and Engineering, 13(6), 1094. https://doi.org/10.3390/jmse13061094