
Prediction of Target-Induced Multipath Interference Acoustic Fields in Shallow-Sea Ideal Waveguides and Statistical Characteristics of Waveguide Invariants

Abstract
1. Introduction
2. Acoustic Scattering by Targets in Ideal Acoustic Waveguides
3. Numerical Simulation of Scattered Acoustic Fields
3.1. Numerical Simulation Model and Parameters
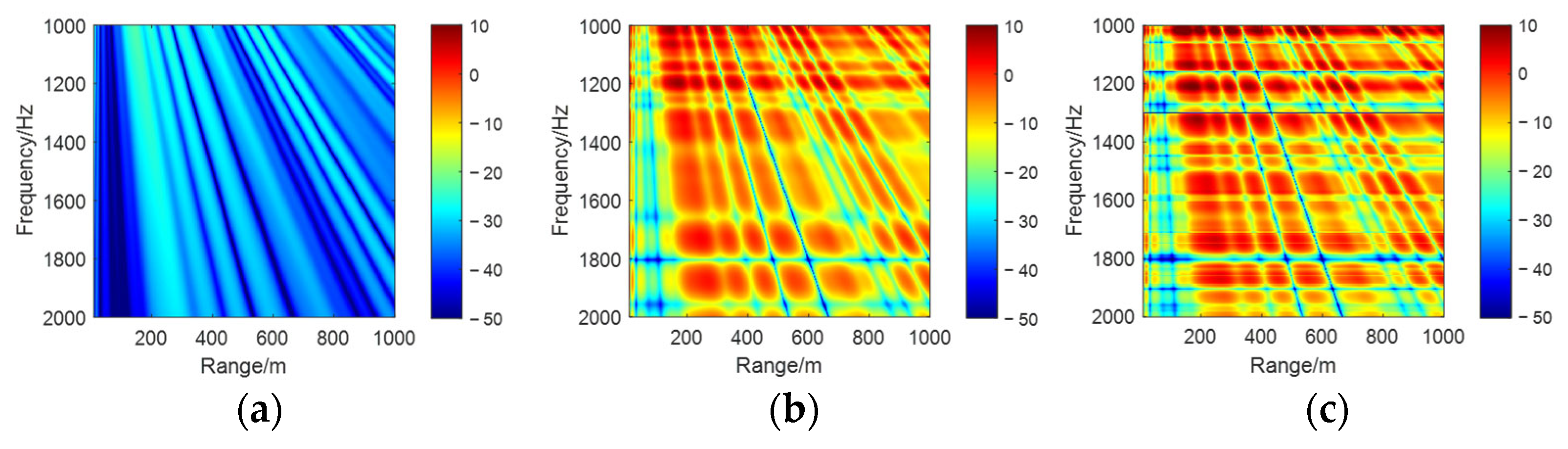
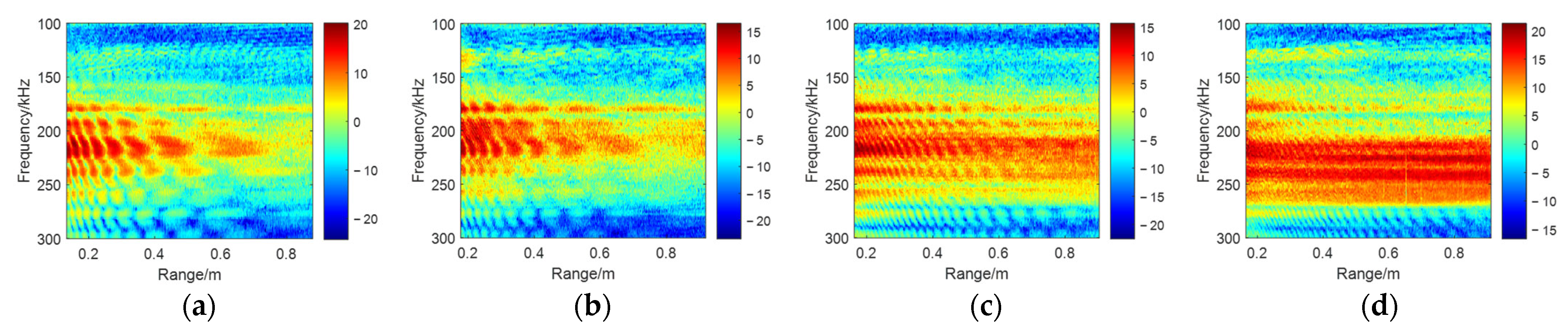
3.2. Numerical Simulation of Range–Frequency Spectra
4. Mechanisms and Interference Fringe Prediction of Target-Induced Acoustic Scattering with Multipath Coupling
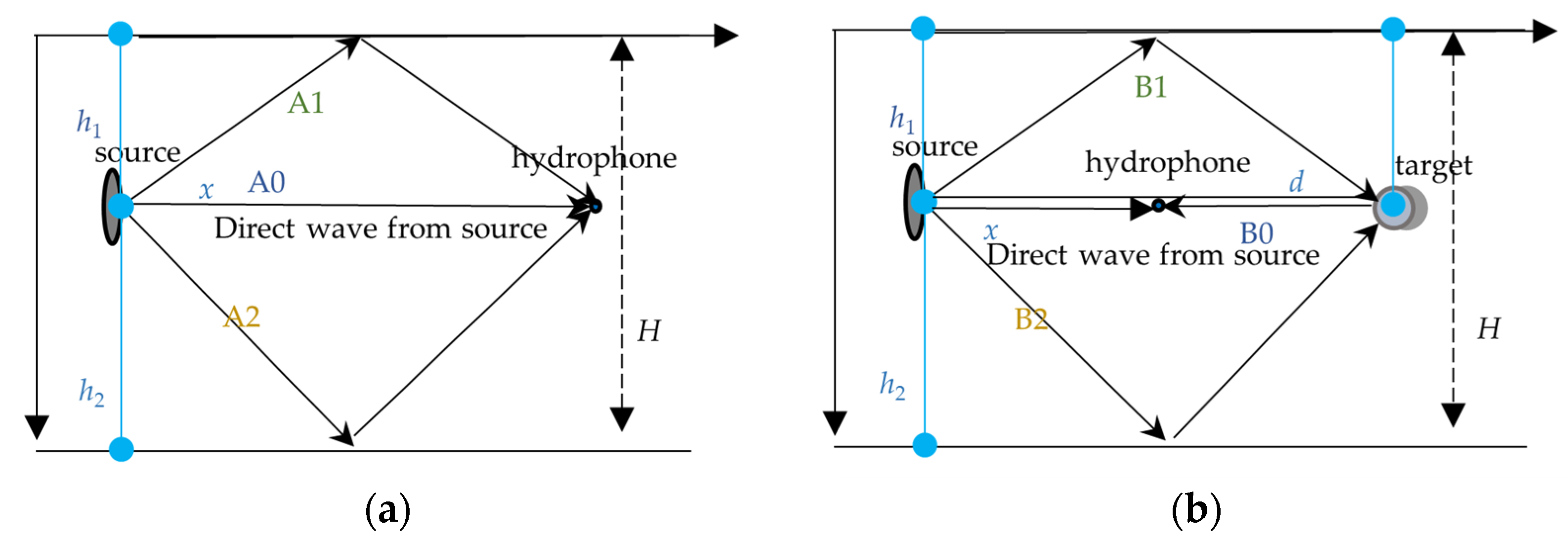
4.1. Mechanisms of Target-Induced Acoustic Scattering with Multipath Coupling
4.2. Interference Fringe Prediction Equation
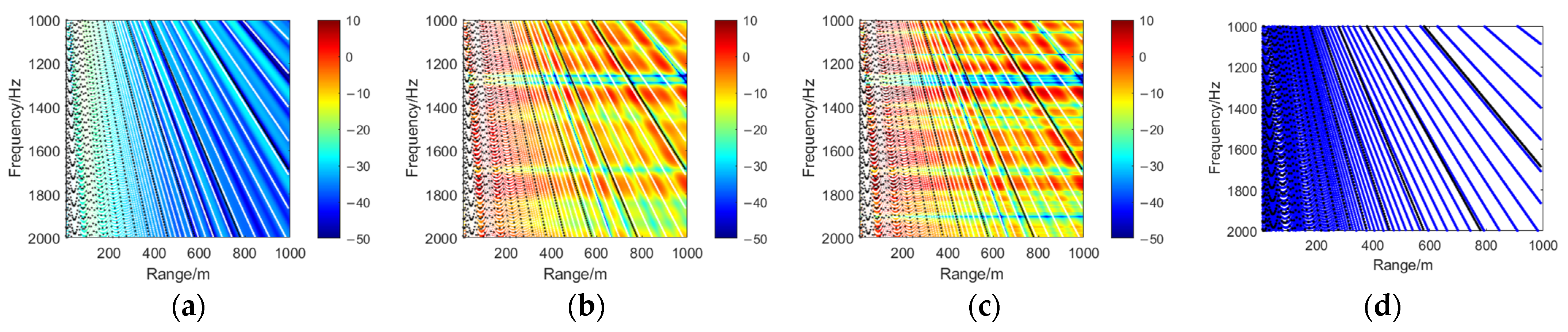
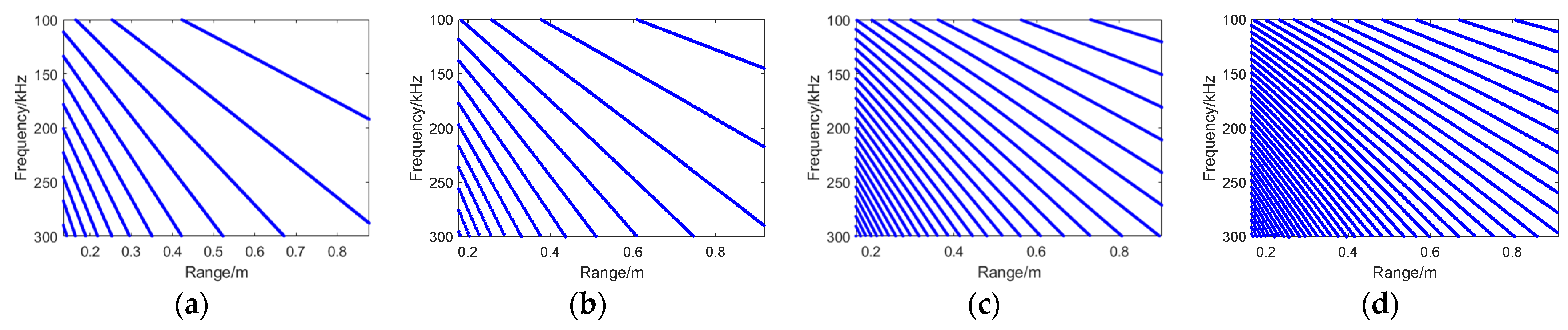
4.3. Numerical Simulation of Acoustic Fields and Interference Fringe Prediction
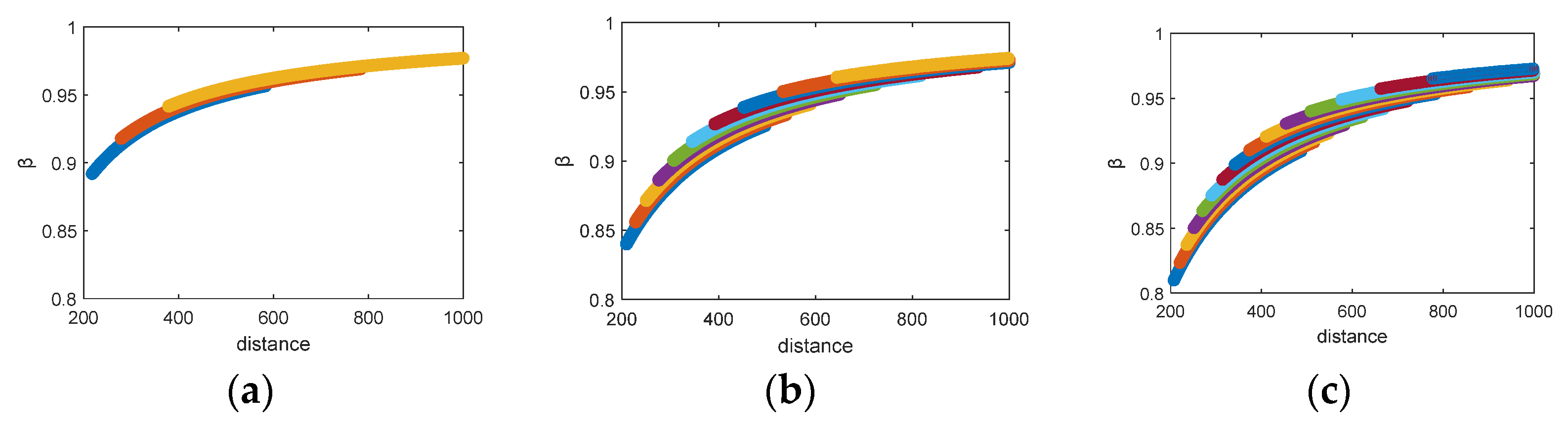
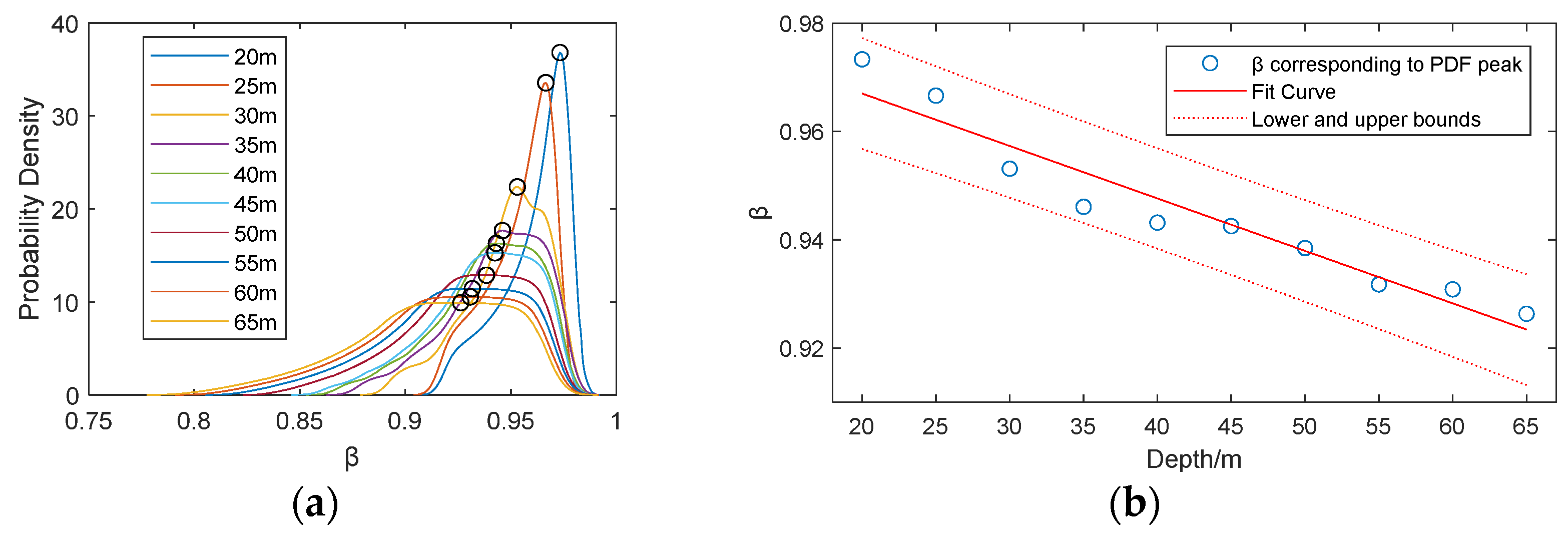
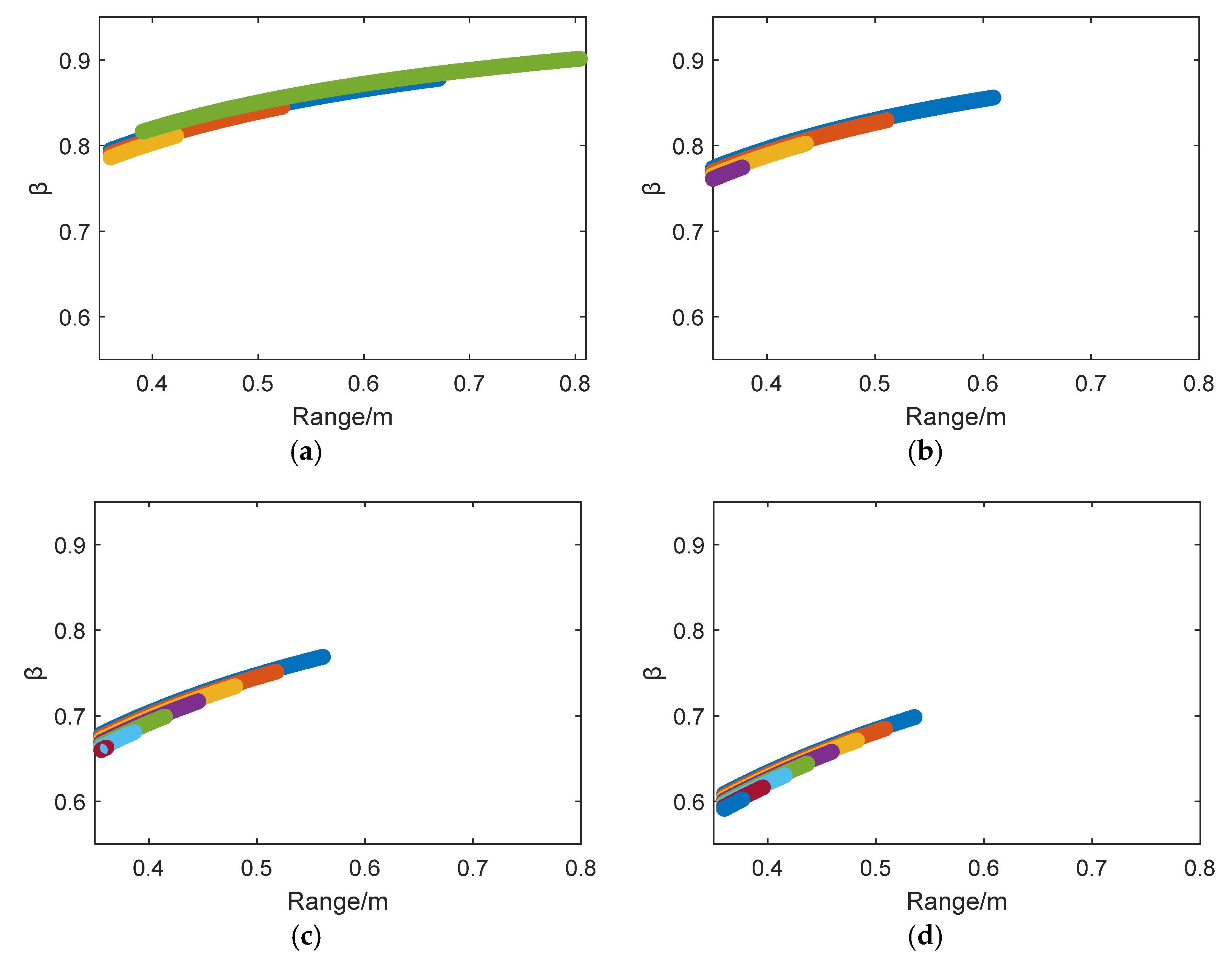
4.4. Statistical Characterization of Interference Fringes
5. Experimental Data Processing and Results Analysis
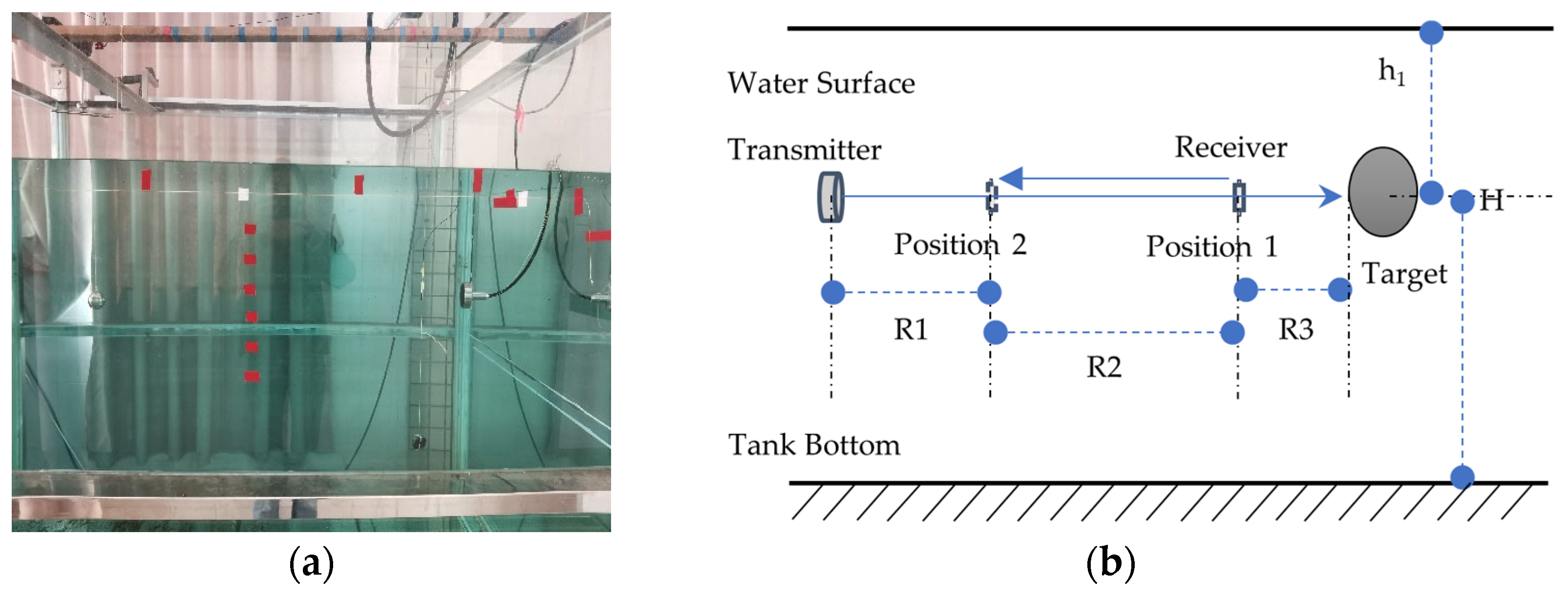
5.1. Experimental Design and Setup
5.2. Time-Domain Echo Characteristics and Analysis
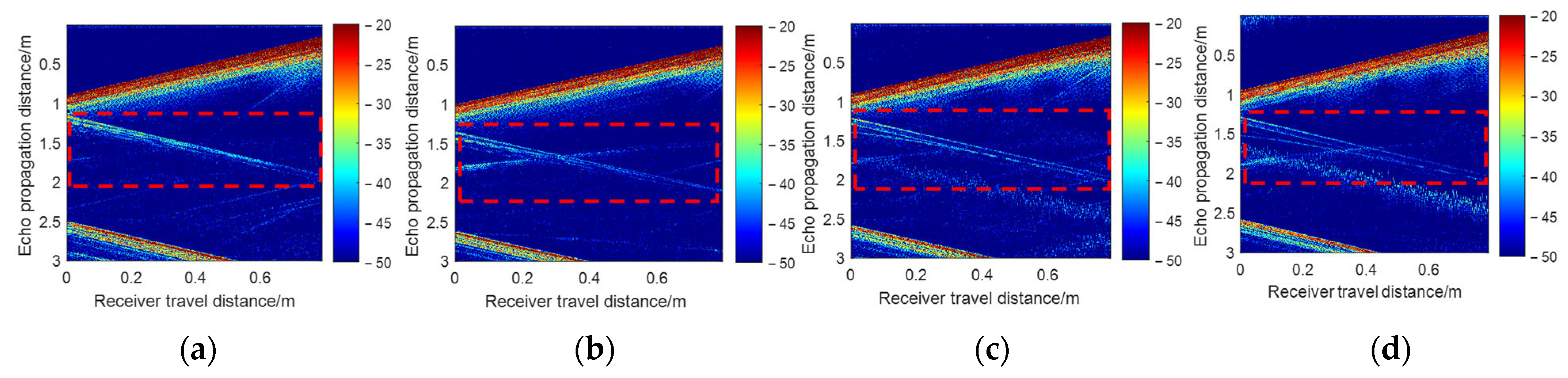
5.3. Interference Fringe Extraction and Validation
6. Results and Discussion
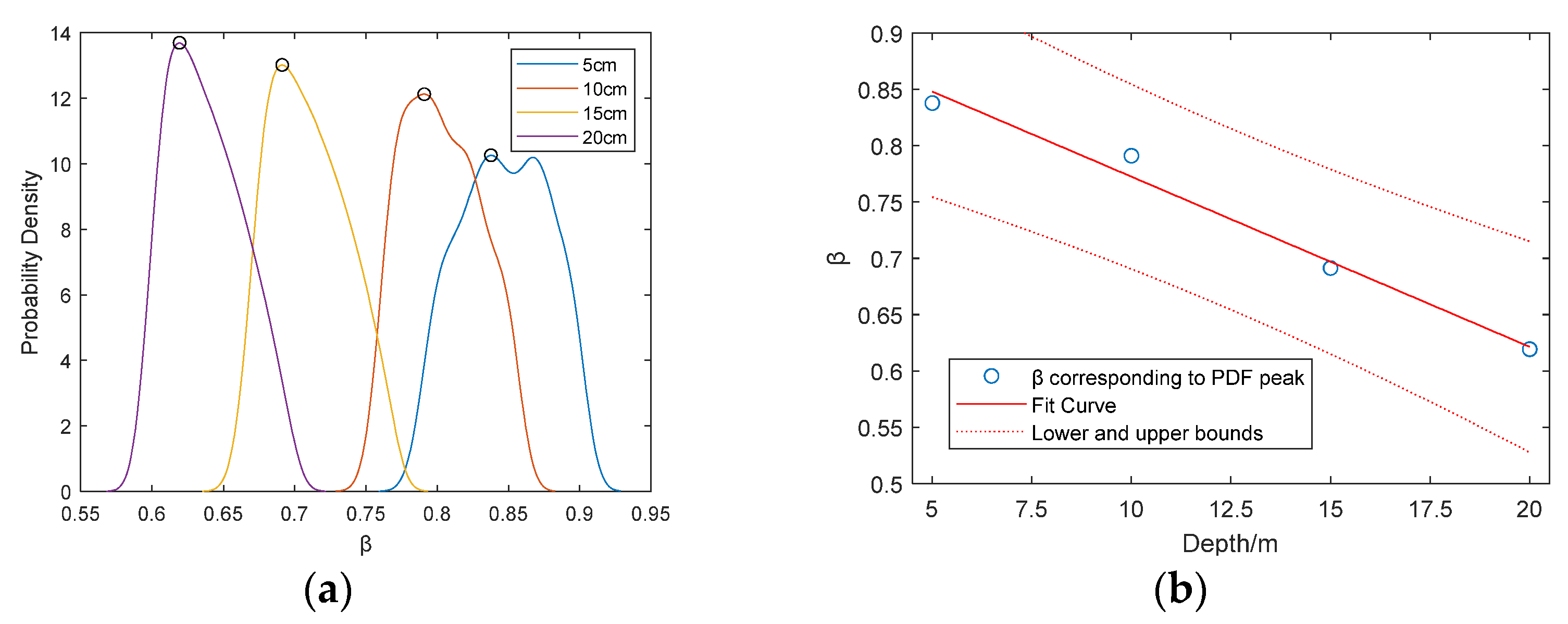
6.1. Statistical Characterization of Waveguide Invariants
6.2. Comparative Analysis
7. Results and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, P.; Zhou, G.; Fan, J.; Wang, B.; Feng, Z. Analysis of acoustic scattering mechanism of a near-bottom suspended elastic sphere. Acta Acust. 2024, 49, 880–888. [Google Scholar] [CrossRef]
- Sun, T.; Yan, Z.; Fan, J.; Zhang, H. Method for Characterizing Active Sonar Interference Fringes Based on the Sum of Curvature. Comput. Eng. 2022, 48, 49–54. [Google Scholar] [CrossRef]
- Dzenis, N.L.; Chuprov, S.D. Influence of Motion of a Monochromatic Source on the Spatial Interference Structure of the Field in a Plane-layered Waveguide. Sov. Phys. Acoust. 1986, 32, 242–243. [Google Scholar]
- Su, X.; Zhang, R.; Li, F. Calculation of the waveguide invariant of acoustic fields by using frequency-shift compensation method. Tech. Acoust. 2007, 26, 1073–1076. [Google Scholar] [CrossRef]
- He, C.; Quijano, J.E.; Zurk, L.M. Enhanced Kalman filter algorithm using the invariance principle. IEEE J. Ocean. Eng. 2009, 34, 575–585. [Google Scholar]
- Zhu, H.; Piao, S.; Zhang, H.; Liu, W. An extraction method for the interference striation of acoustic vector fields in shallow water. Acta Acust. 2016, 41, 30–40. [Google Scholar]
- Lu, L.; Ma, L. Analysis of waveguide time-frequency based on Warping transform. Acta Phys. Sin. 2015, 64, 297–302. [Google Scholar]
- Yao, Y.; Sun, C.; Liu, X.H.; Li, M. Waveguide invariant estimation based on correlation coefficient of tonal acoustic intensity interference fluctuation. J. Northwestern Polytech. Univ. 2023, 41, 612–620. [Google Scholar] [CrossRef]
- Mo, S.; Wang, B.; Li, T. Vector waveguide invariant estimation based on the lines segment detector algorithm. J. Harbin Eng. Univ. 2023, 44, 1748–1757. [Google Scholar]
- Li, M.; Zhao, A.; Song, X. Waveguide invariant extraction technique in shallow water. In Proceedings of the 2017 National Conference on Acoustics, Hangzhou, China, 22 September 2017. [Google Scholar]
- Li, M. Extraction Techniques for Waveguide Invariants in Shallow-Sea Acoustic Fields. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Liu, Z.; Guo, L.; Yan, C. Source depth discrimination in negative thermocline using waveguide invariant. Acta Acust. 2019, 44, 925–933. [Google Scholar]
- Wang, W.; Su, L.; Wang, Z.; Hu, T.; Ren, Q.; Guo, S.; Ma, L. A broadband source depth estimation based on frequency domain interference pattern structure of vertical array beam output in direct zone of deep sea. Acta Acust. 2021, 46, 161–170. [Google Scholar]
- Dun, J.; Zhou, S.; Qi, Y.; Liu, C. Simulation Study on Detection and Localization of a Moving Target Under Reverberation in Deep Water. J. Mar. Sci. Eng. 2024, 12, 2360. [Google Scholar] [CrossRef]
- Xu, J.; Guo, L.; Yan, C. Source depth estimation using frequency domain interference structure in deep ocean bottom bounce area. Acta Acust. 2023, 48, 425–436. [Google Scholar]
- Li, X.; Wang, B.; Bi, X.; Wu, H. A fast inversion method for ocean parameters based on dispersion curves with a single hydrophone. Acta Oceanol. Sin. 2022, 41, 71–85. [Google Scholar] [CrossRef]
- Zhai, Z.; Li, F.; Zhang, B.; Zhai, Z.; Hu, C. Broadband source localization by matching interference structure in the direct zone of deep water using a bottom-mounted horizontal array. Acta Acust. 2025, 5, 433–444. [Google Scholar] [CrossRef]
- Zakharenko, A.; Trofimov, M.; Petrov, P. Improving the performance of mode-based sound propagation models by using perturbation formulae for eigenvalues and eigenfunctions. J. Mar. Sci. Eng. 2021, 9, 934. [Google Scholar] [CrossRef]
- Kozitskiy, S. Coupled-mode parabolic equations for the modeling of sound propagation in a shallow-water waveguide with weak elastic bottom. J. Mar. Sci. Eng. 2022, 10, 1355. [Google Scholar] [CrossRef]
- Su, X.; Qin, J.; Yu, X. Interference Pattern Anomaly of an Acoustic Field Induced by Bottom Elasticity in Shallow Water. J. Mar. Sci. Eng. 2023, 11, 647. [Google Scholar] [CrossRef]
- Mei, X.; Zhang, B.; Zhai, D. Bearing-Only Multi-Target Localization Incorporating Waveguide Characteristics for Low Detection Rate Scenarios in Shallow Water. J. Mar. Sci. Eng. 2024, 12, 2300. [Google Scholar] [CrossRef]
- Ingenito, F. Scattering from an object in a stratified medium. J. Acoust. Soc. Am. 1987, 82, 2051–2059. [Google Scholar] [CrossRef]
- Folds, D.L.; Loggins, C.D. Transmission and reflection of ultrasonic waves in layered media. J. Acoust. Soc. Am. 1977, 62, 1102–1109. [Google Scholar] [CrossRef]
- Quijano, J.E.; Campbell, R.L.; Oesterlein, T.G. Experimental observations of active invariance striations in a tank environment. J. Acoust. Soc. Am. 2010, 128, 611–618. [Google Scholar] [CrossRef] [PubMed]
- Lan, C.; Zhang, H. Calculation and measurement of the propagation velocity of the Franz wave. Acta Acust. 1988, 13, 147–149. [Google Scholar] [CrossRef]
- Flax, L.; Varadan, V.K.; Varadan, V.V. Scattering of an obliquely incident acoustic wave by an infinite cylinder. J. Acoust. Soc. Am. 1980, 68, 1832–1835. [Google Scholar] [CrossRef]
- Wu, Y. Acoustic Scattering Characteristics and Feature Extraction of Underwater Spherical and Cylindrical Objects. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2019. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension/m | Density/kg·m−3 | Longitudinal Wave Speed/m·s−1 | Shear Wave Speed/m·s−1 | |
|---|---|---|---|---|
| Water | Depth 100 | 1000 | 1500 | - |
| Rigid Sphere | Radius 5 | - | - | - |
| Elastic Sphere | Radius 5 | 7900 | 6420 | 3040 |
| ID | Wave Type | Propagation Path/m |
|---|---|---|
| A0 | Direct Wave From Source | x |
| A1 | Source → Sea Surface → Hydrophone | |
| A2 | Source → Seafloor → Hydrophone | |
| B0 | Source → Target → Hydrophone | |
| B1 | Source → Sea Surface → Target → Hydrophone | |
| B2 | Source → Seafloor → Target →Hydrophone |
| Depth/m | Waveguide Invariant Range/β | Probability Density Peak/β |
|---|---|---|
| 20 | 0.91–0.98 | 0.97 |
| 30 | 0.89–0.98 | 0.95 |
| 40 | 0.86–0.98 | 0.94 |
| 50 | 0.84–0.98 | 0.93 |
| 60 | 0.81–0.98 | 0.92 |
| Depth/cm | Waveguide Invariant Range/β | Probability Density Peak/β | ||
|---|---|---|---|---|
| Prediction Formula | Peak Extraction | Prediction Formula | Peak Extraction | |
| 5 | 0.76–0.90 | 0.66–0.91 | 0.83 | 0.79 |
| 10 | 0.75–0.85 | 0.70–0.87 | 0.79 | 0.77 |
| 15 | 0.66–0.76 | 0.61–0.72 | 0.69 | 0.67 |
| 20 | 0.59–0.69 | 0.60–0.70 | 0.61 | 0.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhang, P.; Li, J. Prediction of Target-Induced Multipath Interference Acoustic Fields in Shallow-Sea Ideal Waveguides and Statistical Characteristics of Waveguide Invariants. J. Mar. Sci. Eng. 2025, 13, 1100. https://doi.org/10.3390/jmse13061100
Zhang Y, Zhang P, Li J. Prediction of Target-Induced Multipath Interference Acoustic Fields in Shallow-Sea Ideal Waveguides and Statistical Characteristics of Waveguide Invariants. Journal of Marine Science and Engineering. 2025; 13(6):1100. https://doi.org/10.3390/jmse13061100
Chicago/Turabian StyleZhang, Yuanhang, Peizhen Zhang, and Jincan Li. 2025. "Prediction of Target-Induced Multipath Interference Acoustic Fields in Shallow-Sea Ideal Waveguides and Statistical Characteristics of Waveguide Invariants" Journal of Marine Science and Engineering 13, no. 6: 1100. https://doi.org/10.3390/jmse13061100
APA StyleZhang, Y., Zhang, P., & Li, J. (2025). Prediction of Target-Induced Multipath Interference Acoustic Fields in Shallow-Sea Ideal Waveguides and Statistical Characteristics of Waveguide Invariants. Journal of Marine Science and Engineering, 13(6), 1100. https://doi.org/10.3390/jmse13061100