
Numerical Analysis of Hydrodynamic Interactions Based on Ship Types


Abstract
1. Introduction
1.1. Ship-Bank Interaction and Bank Effect
1.2. Shallow Water Effects
1.3. Propeller and Hull Interaction
1.4. Additional Studies
2. Materials and Methods
2.1. Coordinate System and Motion Equations
2.2. Numerical Solution Algorithm (Implemented in Fortran Power Station 90)
- Input Variables: In the Fortran code, the geometric properties of the hull, physical properties of the fluid, and initial conditions are set as input variables.
- Velocity Potential Calculation: The velocity potential , which satisfies the boundary conditions, is computed using numerical methods implemented in Fortran. Iteration loops and array operations are used to update the values of the velocity potential at each grid point.
- Boundary Condition Application: The boundary conditions for the hull surface, bank wall, and free surface are implemented in the Fortran code. Efficient handling of boundary conditions is achieved using Fortran’s array and indexing capabilities.
- Vortex Strength Calculation: The vortex strength is computed using the integral equations. Numerical integration methods in Fortran are used to track the vortex distribution at each time step.
- Assumptions and Navigation Conditions: In this study, it is assumed that the target ships pass parallel to a semi-circular bank wall. Various geometric and environmental conditions, such as the radius of the semi-circular shape, the proximity to the wall, and the water depth near the wall, are specified. The navigation conditions of the target ships were assumed to be a ship velocity of 4 knots with no yaw rate (yaw rate = 0), and the distances were expressed in terms of the ship’s length L .
- Postprocessing and Output: Fortran, being a language specialized in numerical computation, allows efficient and stable performance of complex calculations such as those involved in this study. The hydrodynamic forces and moments were calculated using the Fortran-based algorithm, and the numerical results were saved in output files. These results were subsequently visualized in Microsoft Excel 2019 for further analysis and comparison.
2.3. Target Ships
2.4. Verification of the Numerical Method
3. Numerical Analysis of Hydrodynamic Forces and Moments
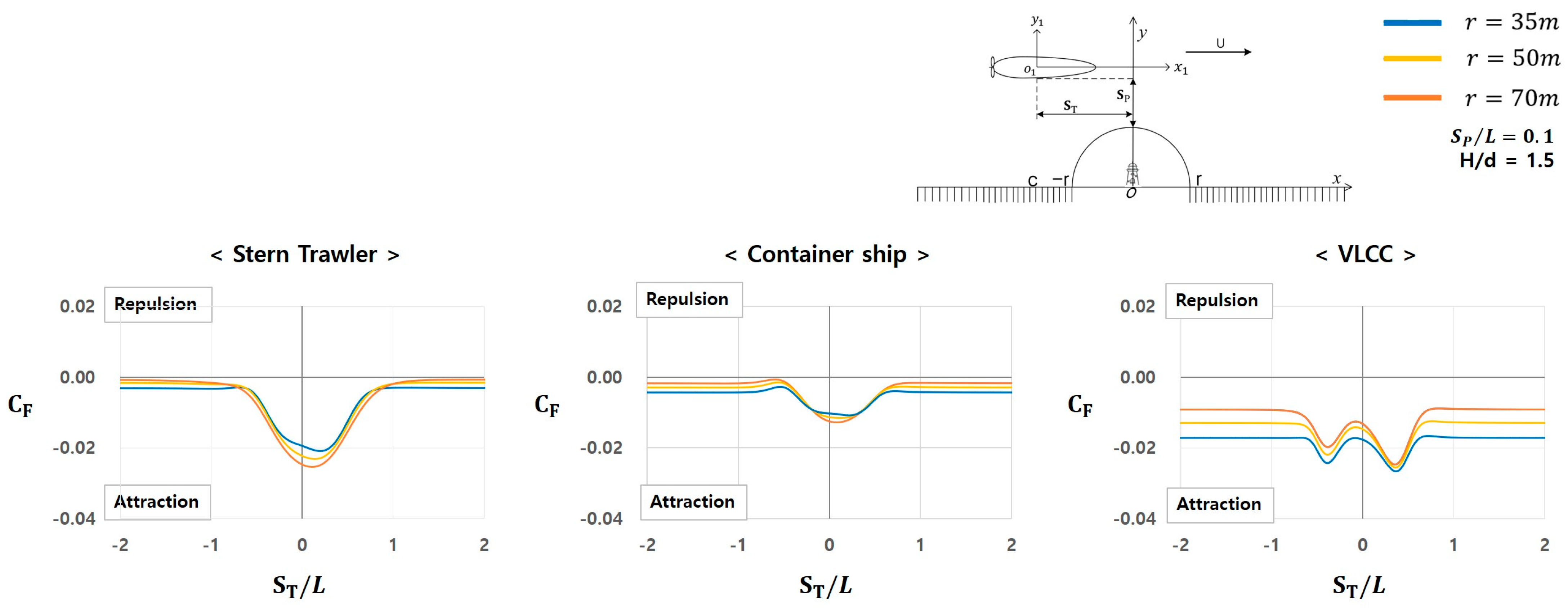
3.1. Forces and Moments Depending on the Radius of the Semi-Circular Shape
- Distance from the lateral side of the hull to the semi-circular shape : 0.1 L.
- Ratio of the water depth to the ship draft : 1.5.
- Radius of the semi-circular shape: 35, 50, and 70 m.
3.1.1. Characteristics of Hydrodynamic Forces
- Stern trawler: a slight attractive force begins to develop at approximately , sharply increasing near . This force peaks after passing and then decreases near , eventually becoming negligible.
- Container ship: although the magnitudes of the forces differ, the overall characteristics are similar to those of a stern trawler.
- VLCC: exhibits relatively different characteristics from those of the stern trawler and container ship. A significant attractive force is generated at approximately , with the force fluctuating between increases and decreases in the range of . Beyond , the force is stabilized.
3.1.2. Characteristics of Hydrodynamic Moments
- Stern trawler: At approximately , the bow repulsive moment sharply increases, reaching its maximum near . This moment then rapidly decreases, transitioning into a bow attractive moment shortly after . The bow attractive moment peaked near and then diminishes, becoming negligible at approximately .
- Container ship: Exhibits a trend similar to that of the stern trawler. However, the magnitude of the hydrodynamic moment is smaller than that of the stern trawler.
- VLCC: Shows completely different characteristics from those of the stern trawler and container ship. Unlike the other two target vessels, the VLCC generates a relatively large bow repulsive moment, starting at approximately . This repulsive moment fluctuates between increases and decreases within the range of and then stabilizes beyond . However, the phenomenon of the bow moving inward toward the bank wall from the original course does not occur.
3.1.3. Comparison of Hydrodynamic Forces and Moments Among the Target Ships
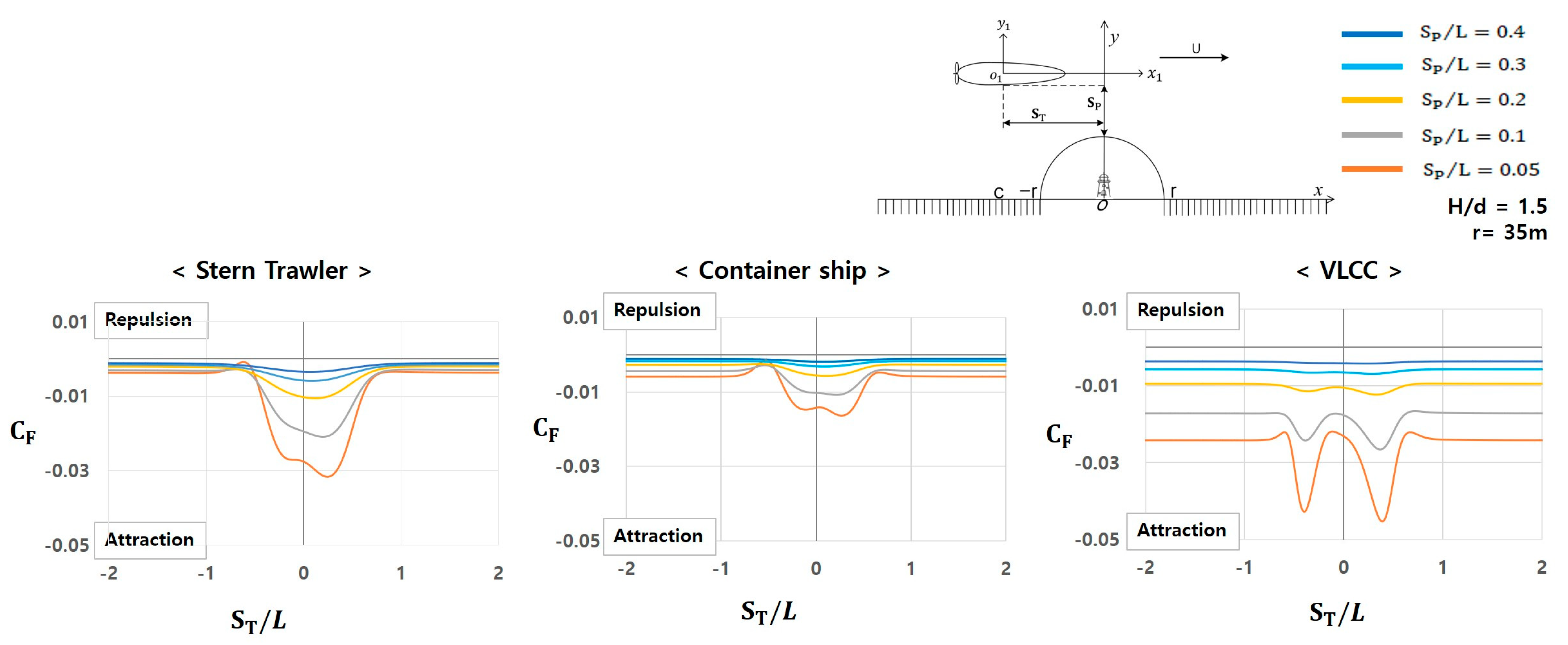
3.2. Forces and Moments Depending on the Lateral Distance from the Bank Wall
- Distance from the lateral side of the hull to the semi-circular shape : 0.05, 0.1, 0.2, 0.3, and 0.4 L.
- Ratio of the water depth to the ship draft : 1.5.
- Radius of the semi-circular shape: 35 m.
3.2.1. Characteristics of Hydrodynamic Forces
- Stern trawler: A slight attractive force is generated at approximately , which gradually increased from . This force reaches its maximum near , then decreases, and becomes minimal at approximately . However, at , unlike the range , the attractive force temporarily decreases near , and the force alternates between increasing and decreasing near . From these results, it can be concluded that the stern trawler exhibits critical hydrodynamic force characteristics at approximately .
- Container ship: Overall, it exhibits characteristics similar to those of the stern trawler; however, the quantitative magnitude of the force is smaller than that of the stern trawler.
- VLCC: Exhibits relatively different characteristics from those of the stern trawler and container ship. A significant attractive force is observed at approximately .0, which increases and decreases repeatedly in the range of , then stabilizes at approximately . Additionally, the VLCC exhibits differences in the magnitudes of the hydrodynamic forces. Notably, at , the attractive force increases and decreases sharply between , unlike that observed in the range . This is considered a critical hydrodynamic force characteristic of the VLCC and requires careful attention.
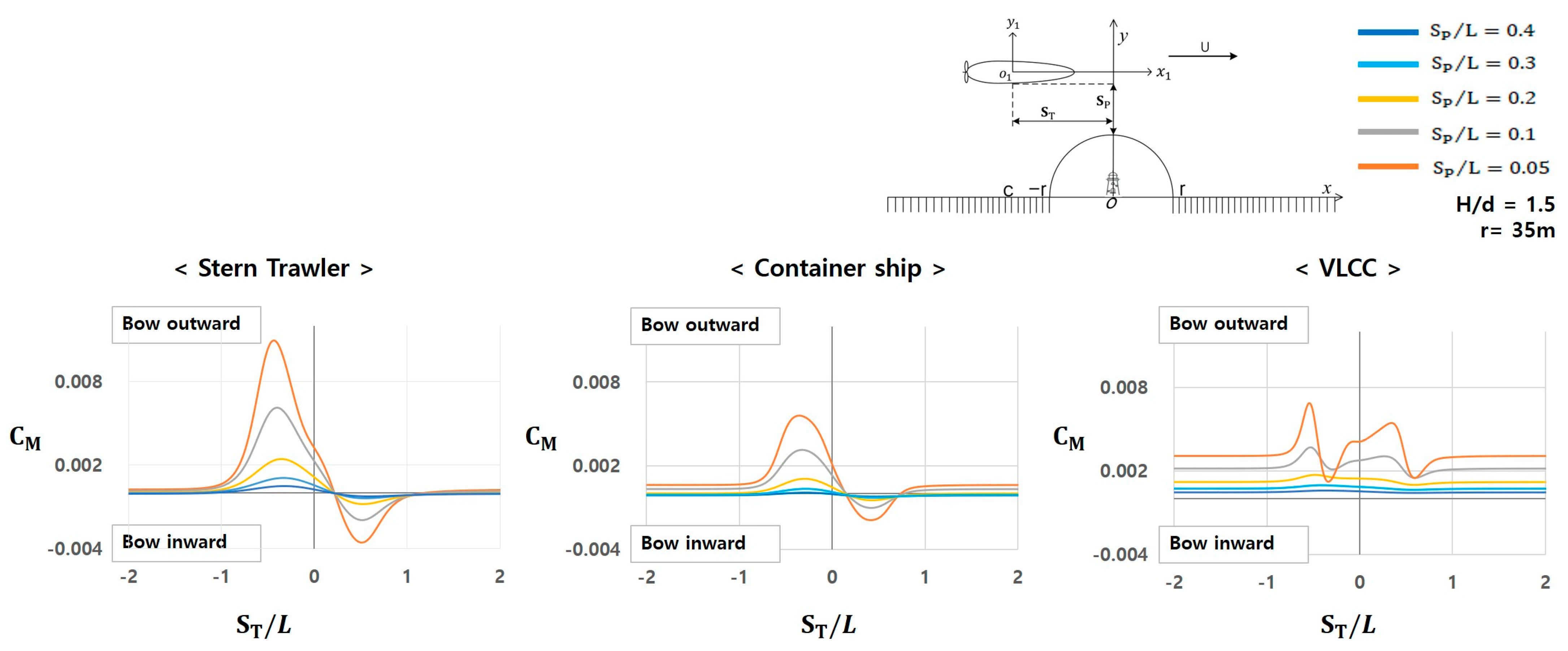
3.2.2. Characteristics of Hydrodynamic Moments
- Stern trawler: The bow repulsive moment starts to sharply increase at approximately 0 and reaches its maximum near , then decreases sharply and transitions to the bow attractive moment after . This attractive moment reaches its maximum near , begins to decrease, and becomes minimal at approximately .
- Container ship: Shows a similar trend to that of the stern trawler, but its magnitude is smaller than that of the stern trawler.
- VLCC: Shows completely different characteristics from those of the stern trawler and container ship. A relatively large bow repulsive moment occurred at approximately , unlike the other two target ships. This repulsive moment increases and decreases irregularly in the range of , then stabilizes after . Additionally, at , both the quantitative magnitude and irregularity of the bow repulsive moment are increased compared with those in the range of . However, the phenomenon of the bow moving inward toward the bank wall from the original course does not occur.
3.2.3. Comparison of Hydrodynamic Forces and Moments Among the Target Ships
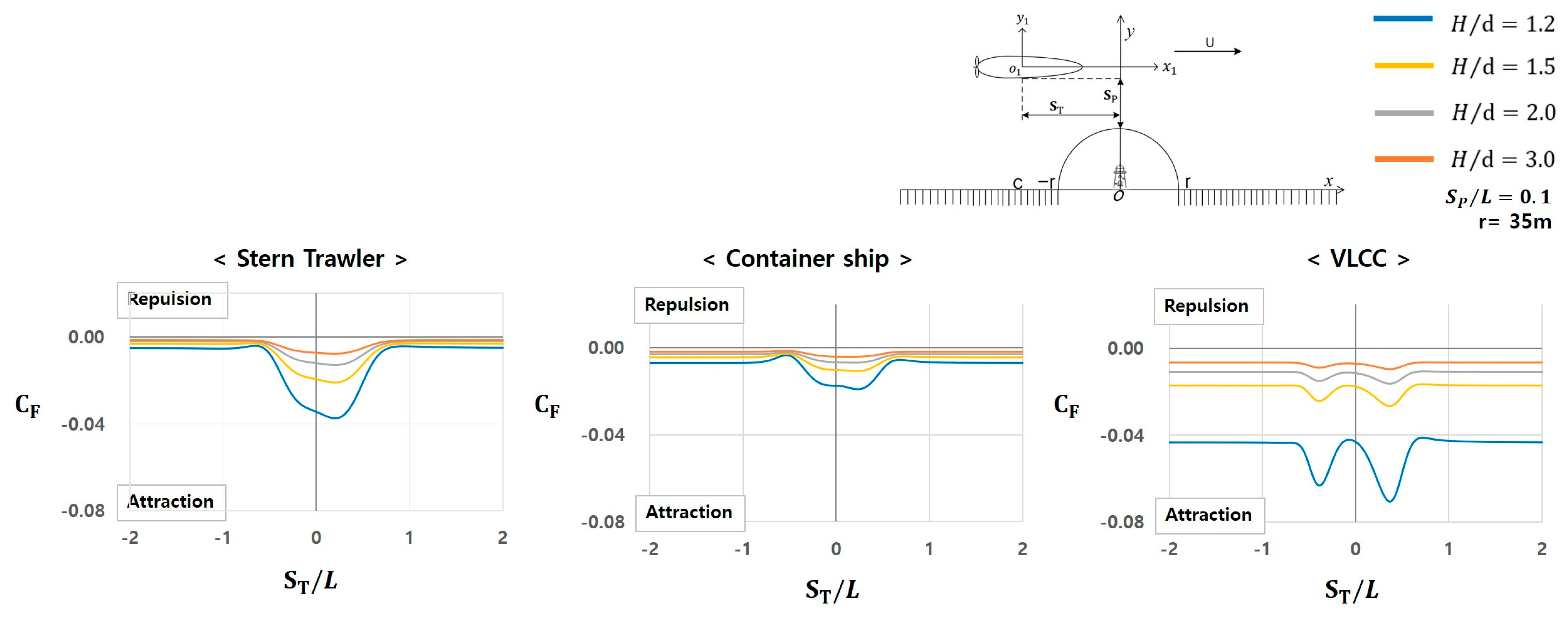
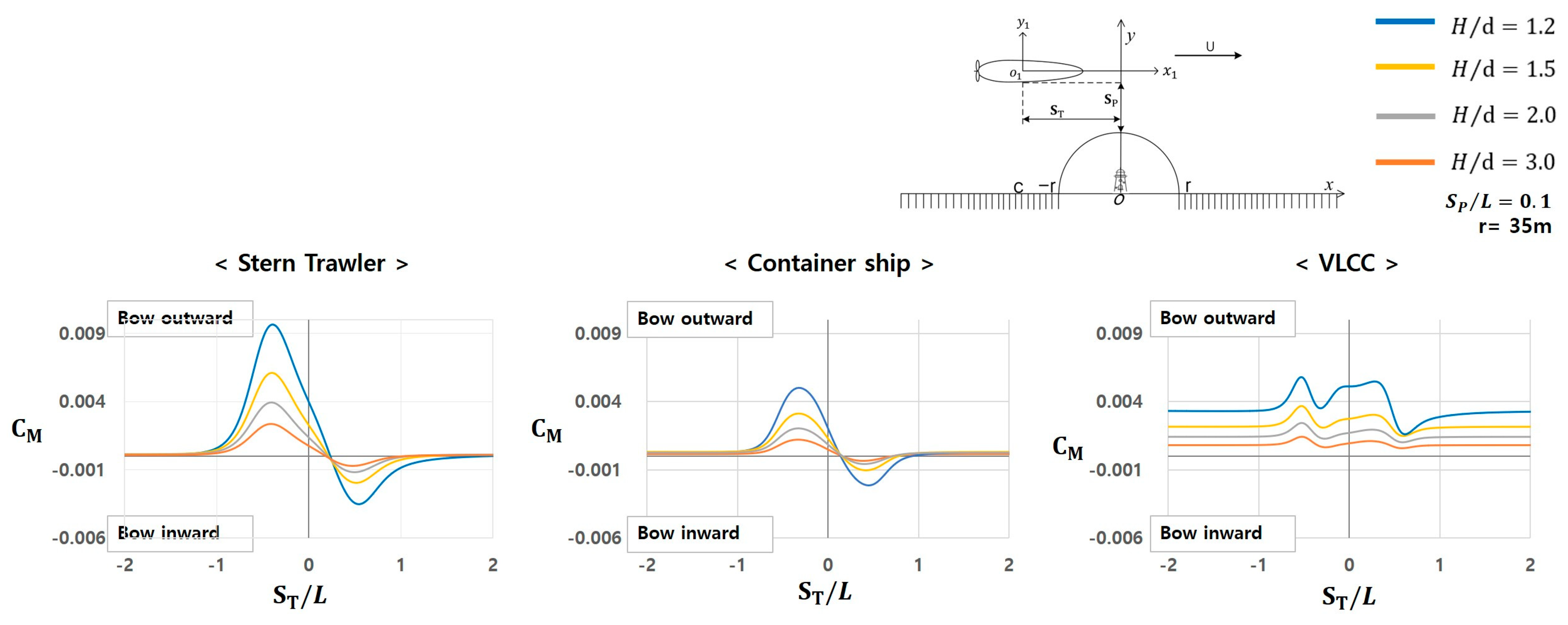
3.3. Forces and Moments Depending on Water Depth Around the Bank Wall
- Distance from the lateral side of the hull to the semi-circular shape : 0.1 m.
- Ratio of the water depth to the ship draft : 1.2, 1.5, 2.0, and 3.0.
- Radius of the semi-circular shape: 35 m.
3.3.1. Characteristics of Hydrodynamic Forces
- Stern trawler: A slight attractive force is observed near , which increases at approximately and reaches its maximum near . Subsequently, the force decreases and becomes minimal near .
- Container ship: Shows a similar pattern to that of the stern trawler; however, the magnitude of the attractive force is smaller.
- VLCC: Exhibits entirely different characteristics from those of the stern trawler and container ship. A significant attractive force occurs at approximately , which increases and decreases in the range of 5. Subsequently, it stabilizes at approximately . Furthermore, the attractive force at is significantly larger than that at , which is considered a noteworthy characteristic that requires attention.
3.3.2. Characteristics of Hydrodynamic Moments
- Stern trawler: The generation of the bow repulsive moment sharply increases at approximately , reaching its maximum magnitude near , then decreases again before transitioning to the bow attractive moment after . This attractive moment peaks at approximately before undergoing a gradual decrease.
- Container ship: Exhibits a trend similar to that of the stern trawler, although the magnitude of the moment is relatively smaller.
- VLCC: Shows relatively different characteristics from those of the stern trawler and container ship. A relatively large bow repulsive moment is observed at approximately . This repulsive moment fluctuates within the range of before stabilizing after .
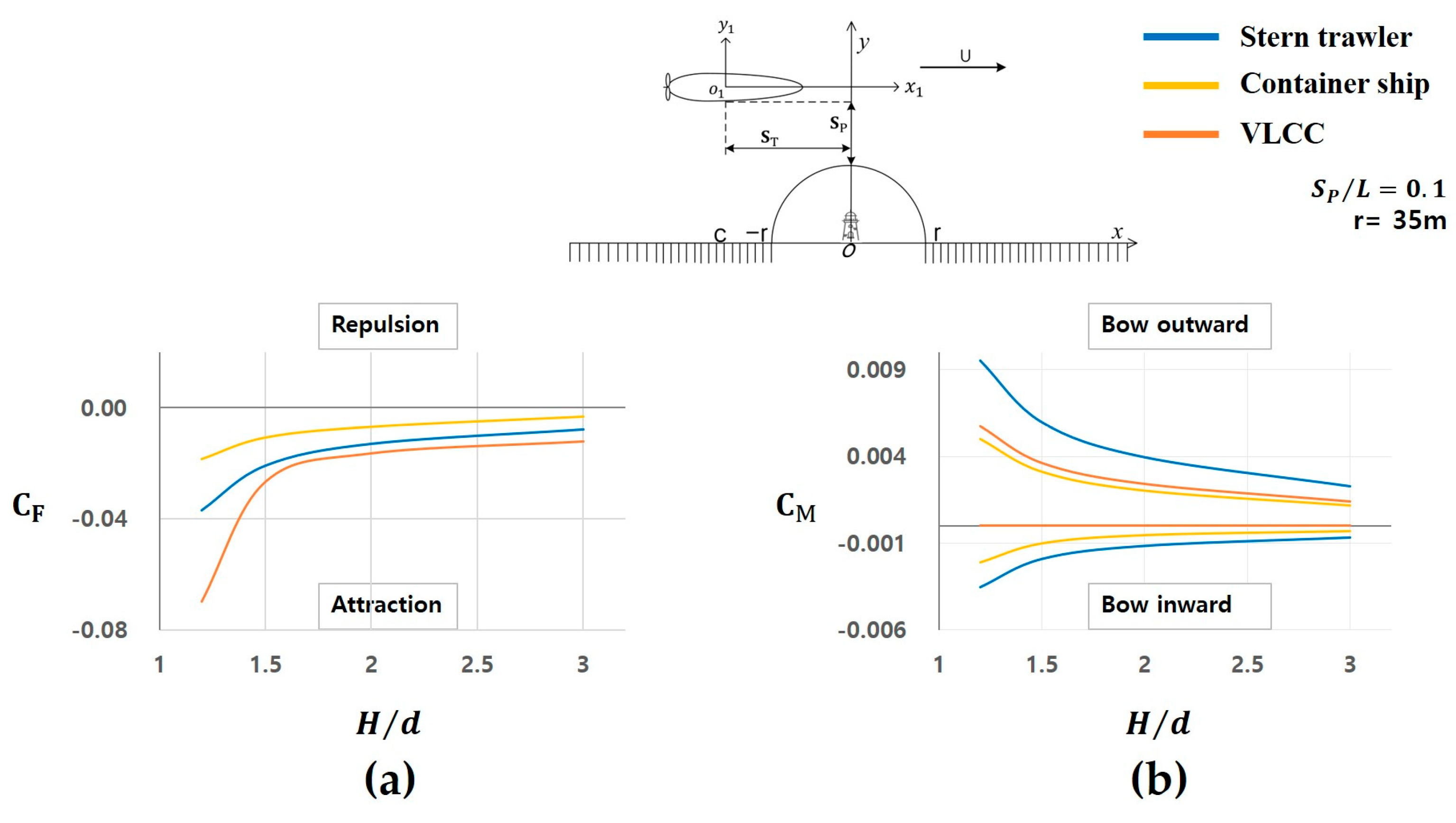
3.3.3. Comparison of Hydrodynamic Forces and Moments Among the Target Ships
4. Discussion
4.1. Variability in Hydrodynamic Characteristics
4.2. Practical Implications for Navigators
4.3. Contribution to Maritime Safety
5. Conclusions
- All three ships experienced attractive lateral forces regardless of their hull form.
- The magnitude of the attractive force was the highest for the VLCC, which has the largest block coefficient () and the lowest Froude number (Fr = 0.037), indicating a fuller hull and slower dynamic response.
- The container ship showed the weakest force, which can be attributed to its slender hull shape with the highest length-to-breadth ratio () and a small block coefficient (), reducing the blockage effect near the wall.
- The stern trawler, with intermediate hull characteristics (, ), exhibited lateral forces between those of the other two ships.
- The stern trawler experienced the most significant yaw moments. This may be due to its relatively short length and moderate breadth, making it more sensitive to asymmetrical flow near the bank.
- The container ship showed similar moment tendencies but with reduced amplitude, likely due to its longer hull stabilizing the yaw response.
- The VLCC, despite its large size, exhibited small yaw moments, which may be due to its greater longitudinal inertia and smoother pressure distribution along its hull.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Resolution MSC 137(76); Standards for Ship Manoeuvrability. IMO (International Maritime Organization): London, UK, 2002; pp. 1–6.
- BBC. The Cost of the Suez Canal Blockage. 2021. Available online: https://www.bbc.com/news/business-56559073 (accessed on 24 March 2025).
- Baric, M.; Mohovic, R.; Mohovic, D.; Pavic, V. The Simulation of Sloped Bank Effect Influence on Container Ship Trajectory. J. Mar. Sci. Eng. 2021, 9, 1283. [Google Scholar] [CrossRef]
- Zou, L.; Zou, Z.J. A Comparative Numerical Study of Bank Effects on a Cruise Ship in Crabbing Motion Based on URANS Method. Appl. Ocean Res. 2022, 126, 103258. [Google Scholar] [CrossRef]
- Delefortrie, G.; Verwilligen, J.; Eloot, K.; Lataire, E. Bank Interaction Effects on Ships in 6 DOF. Ocean Eng. 2024, 310, 118614. [Google Scholar] [CrossRef]
- Ma, S.J.; Zhou, M.G.; Zou, Z.J. Hydrodynamic Interaction among Hull, Rudder and Bank for a Ship Sailing Along a Bank in Restricted Waters. J. Hydrodyn. Ser. B 2013, 25, 809–817. [Google Scholar] [CrossRef]
- Lee, C.K.; Kang, I.K. A Study on the Hydrodynamic Interaction Forces Between Ship and Bank Wall in the Proximity of Bank. Korean Soc. Fish. Ocean Technol. 2004, 40, 73–77. Available online: http://db.koreascholar.com/Article/Detail/256465 (accessed on 24 March 2025).
- Yasukawa, H. Maneuvering Hydrodynamic Derivatives and Course Stability of a Ship Close to a Bank. Ocean Eng. 2019, 188, 106149. [Google Scholar] [CrossRef]
- Kijima, K.; Qing, H. Manoeuvering Motion of a Ship in the Proximity of Bank Wall. J. Soc. Nav. Archit. Jpn. 1987, 162, 125–132. [Google Scholar] [CrossRef] [PubMed]
- Kijima, K.; Furukawa, Y.; Qing, H. The Interaction Effects Between Two Ships in the Proximity of Bank Wall. Trans. West-Jpn. Soc. Nav. Archit. 1991, 81, 101–112. [Google Scholar]
- Kijima, K.; Furukawa, Y. A Ship Maneuvering Motion in the Proximity of Pier. In Proceedings of the International Committee on Manoeuvering and Control of Marine Craft, Southampton, UK, 7–9 September 1994; pp. 211–222. [Google Scholar]
- Martić, I.; Degiuli, N.; Borčić, K.; Grlj, C.G. Numerical Assessment of the Resistance of a Solar Catamaran in Shallow Water. J. Mar. Sci. Eng. 2023, 11, 1706. [Google Scholar] [CrossRef]
- Martić, I.; Anušić, B.; Degiuli, N.; Grlj, C.G. Numerically Investigating the Effect of Trim on the Resistance of a Container Ship in Confined and Shallow Water. Appl. Sci. 2024, 14, 6570. [Google Scholar] [CrossRef]
- Lee, C.K.; Kim, S.H.; Yim, J.B.; Lee, S.M. Study on the Maneuvering Characteristics of a Fishing Vessel in Shallow Water. Nav. Eng. J. 2019, 131, 95–104. [Google Scholar]
- Kim, S.H.; Lee, C.K.; Chae, Y.B. Prediction of Maneuverability in Shallow Water of Fishing Trawler by Using Empirical Formula. J. Mar. Sci. Eng. 2021, 9, 1392. [Google Scholar] [CrossRef]
- Hadi, E.S.; Tuswan, T.; Azizah, G.; Ali, B.; Samuel, S.; Hakim, M.L.; Satrio, D. Influence of the Canal Width and Depth on the Resistance of 750 DWT Perintis Ship Using CFD Simulation. Brodogradnja 2023, 74, 117–144. [Google Scholar] [CrossRef]
- Kaidi, S.; Smaoui, H.; Sergent, P. Numerical Estimation of Bank-Propeller-Hull Interaction Effect on Ship Manoeuvring Using CFD Method. J. Hydrodyn. Ser. B 2017, 29, 154–167. [Google Scholar] [CrossRef]
- Wang, C.; Diao, M.; Tong, S.; Jiang, L.; Tang, X.; Jiang, P. Numerical Simulation Study on Ship Manoeuvrability in Mountainous Rivers: Comprehensively Considering Effects of Nonuniform Flow, Shallow Water, Narrow Banks, Winds and Waves. Ocean Eng. 2024, 306, 118109. [Google Scholar] [CrossRef]
- Yasukawa, H. Ship Maneuvering Motions in the Proximity of Bank. Trans. West-Jpn. Soc. Nav. Archit. 2002, 104, 41–52. [Google Scholar]
- Yasukawa, H. Bank Effect on Ship Maneuverability in a Channel with Varying Width. Trans. West-Jpn. Soc. Nav. Arch. 1991, 81, 85–100. [Google Scholar]
- Yasukawa, H. Ship Manoeuvring Motions Between Two Ships Navigating in the Proximity. Trans. West-Jpn. Soc. Nav. Arch. 2002, 105, 43–54. [Google Scholar]
- Taylor, P.J. The blockage coefficient for flow about an arbitrary body immersed in a channel. J. Ship Res. 1973, 17, 97–105. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of the Ship | L (m) | B (m) | d (m) | V (knot) | |||
|---|---|---|---|---|---|---|---|
| Stern trawler | 85.0 | 15.4 | 5.3 | 5.52 | 0.592 | 4.0 | 0.071 |
| Container ship | 175.0 | 25.375 | 9.502 | 6.90 | 0.5717 | 4.0 | 0.050 |
| VLCC | 325.0 | 53.0 | 22.05 | 6.13 | 0.831 | 4.0 | 0.037 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.-K.; Kim, S.-H. Numerical Analysis of Hydrodynamic Interactions Based on Ship Types. J. Mar. Sci. Eng. 2025, 13, 1075. https://doi.org/10.3390/jmse13061075
Lee C-K, Kim S-H. Numerical Analysis of Hydrodynamic Interactions Based on Ship Types. Journal of Marine Science and Engineering. 2025; 13(6):1075. https://doi.org/10.3390/jmse13061075
Chicago/Turabian StyleLee, Chun-Ki, and Su-Hyung Kim. 2025. "Numerical Analysis of Hydrodynamic Interactions Based on Ship Types" Journal of Marine Science and Engineering 13, no. 6: 1075. https://doi.org/10.3390/jmse13061075
APA StyleLee, C.-K., & Kim, S.-H. (2025). Numerical Analysis of Hydrodynamic Interactions Based on Ship Types. Journal of Marine Science and Engineering, 13(6), 1075. https://doi.org/10.3390/jmse13061075