
Energy-Optimized Path Planning and Tracking Control Method for AUV Based on SOC State Estimation


Abstract
1. Introduction
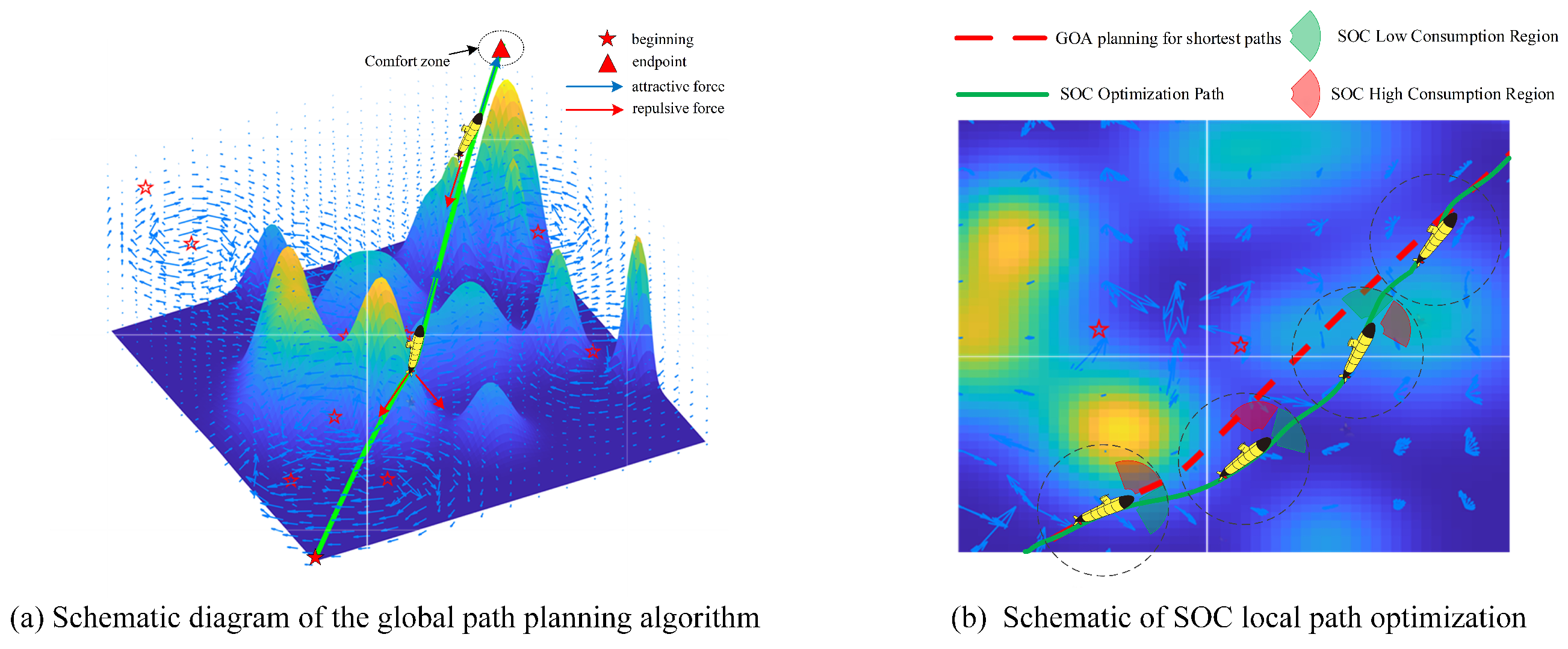
- In view of the fact that AUVs cannot replenish energy underwater, a new GOA-PF path planning method for optimizing SOC is proposed.
- In view of the anti-interference ability of AUV path tracking and avoiding excessive energy loss, a SOC-optimized NMPC control method is proposed.
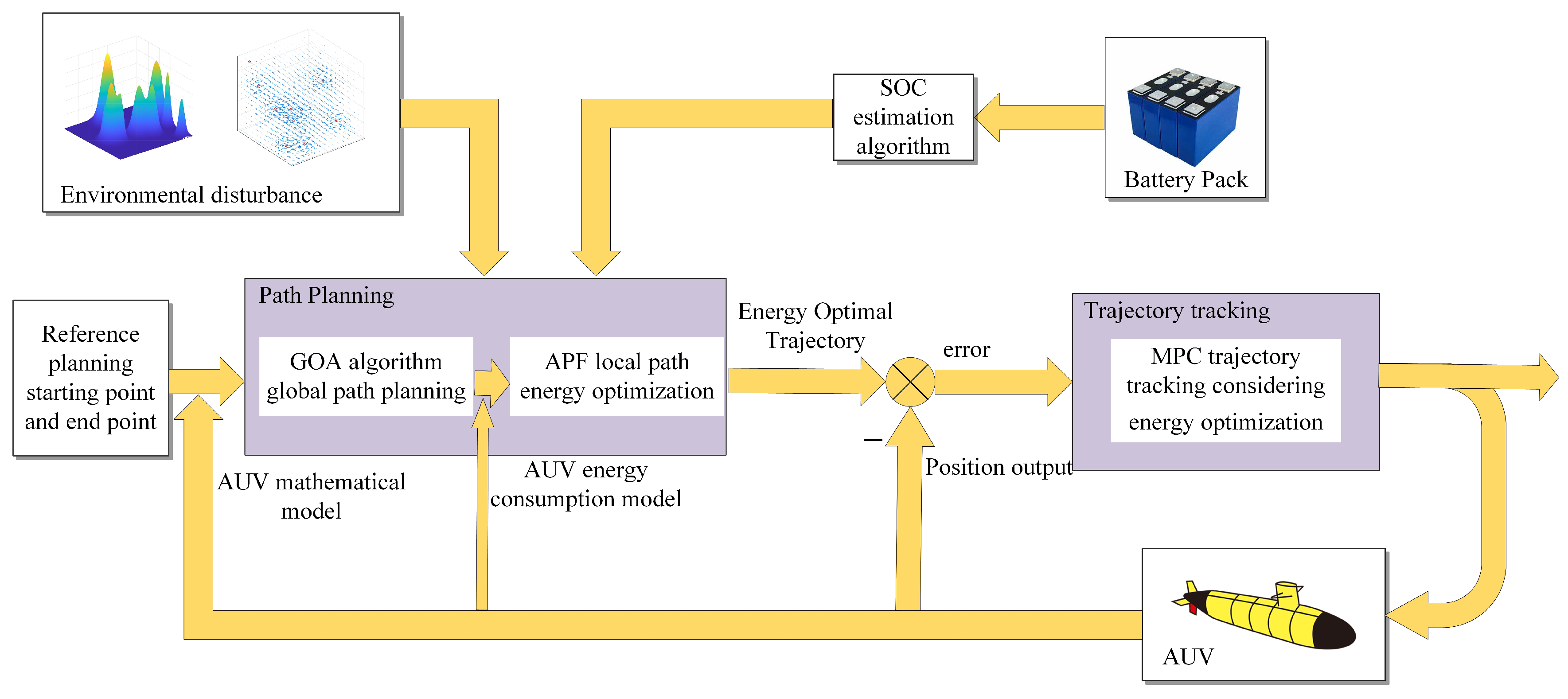
- An integrated framework of path planning and tracking control based on SOC optimization is proposed. By combining path planning with SOC optimization and continuing to pay attention to the dynamic management of SOC in the path tracking stage, the unified optimization of path selection and energy management during the AUV mission execution is achieved.
2. AUV System Description and Modeling
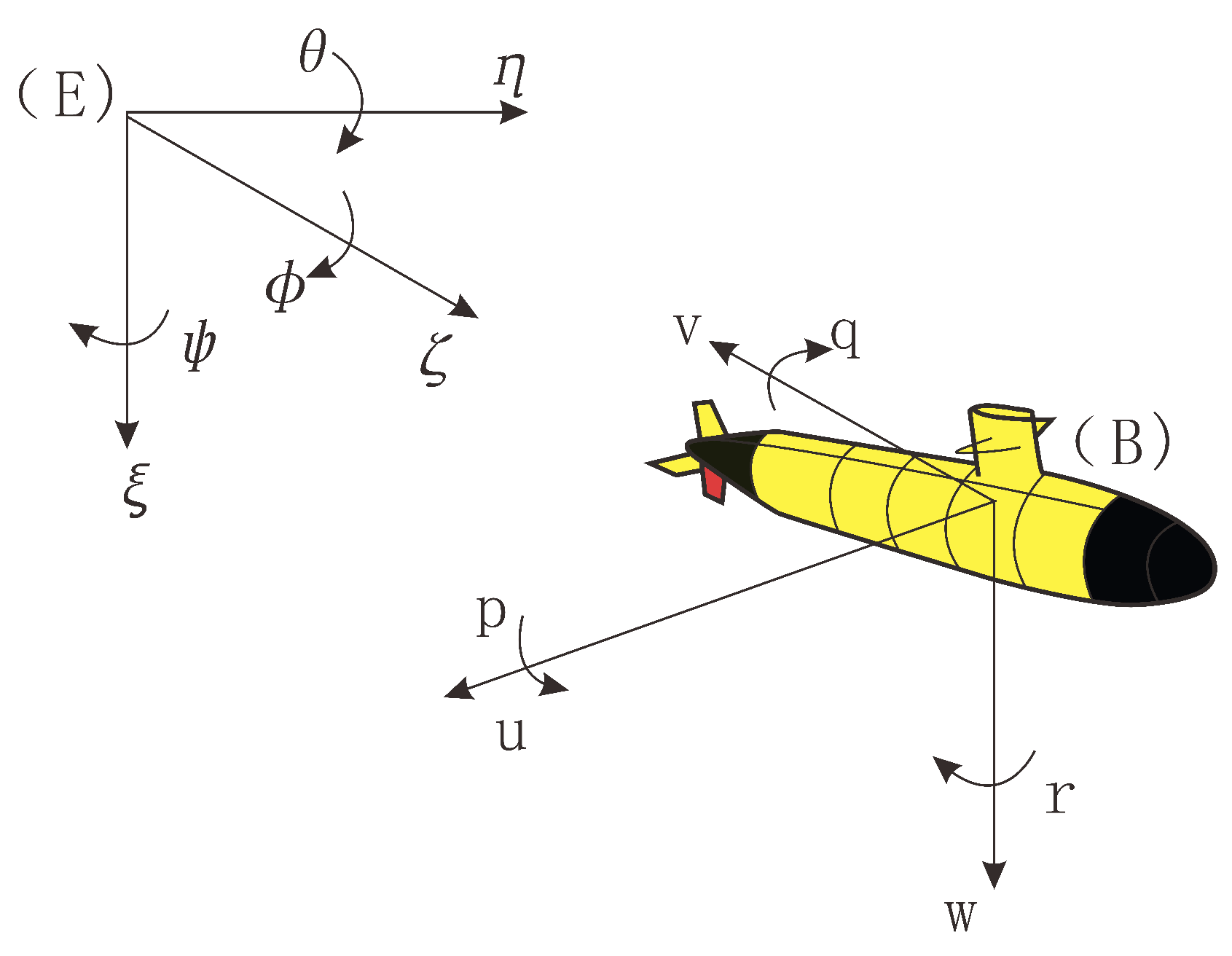
2.1. Kinematic and Dynamic Models
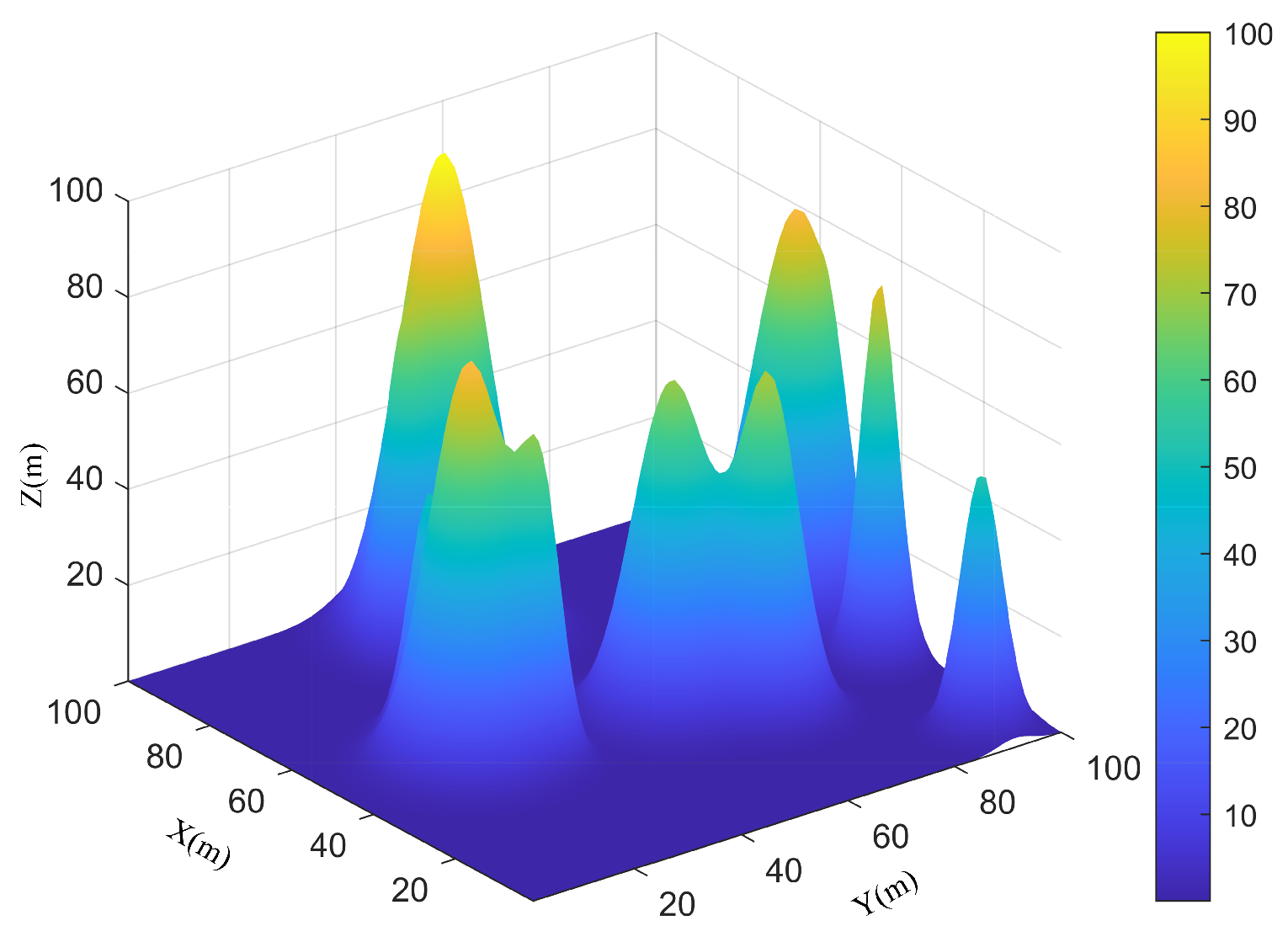
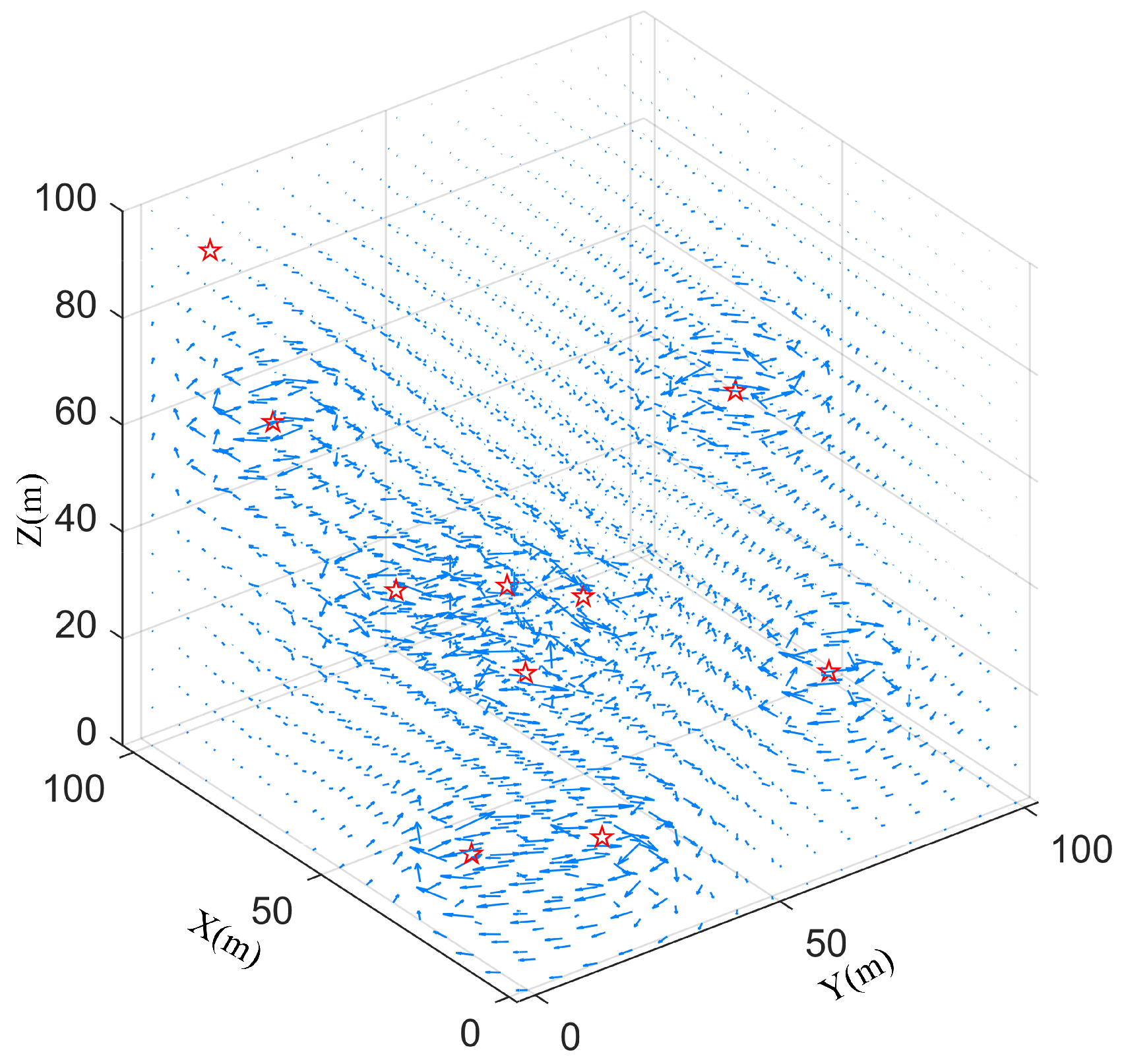
2.2. Underwater Environment Model
2.3. Energy Consumption Model
2.4. Battery Model
3. GOA-PF Path Planning Combined with SOC
3.1. Traditional GOA Algorithm
3.2. GOA-PF Path Planning Algorithm Combined with SOC
| Algorithm 1: Pseudocode of GOA-PF algorithm combined with SOC optimization |
| Input: , , Environment data, Initial SOC |
| Output: |
|
4. Design of MPC Controller Based on SOC Optimization
4.1. MPC Controller Design
4.2. Design of MPC Controller Combined with SOC Optimization
4.3. Stability Analysis
5. Simulation Results Analysis
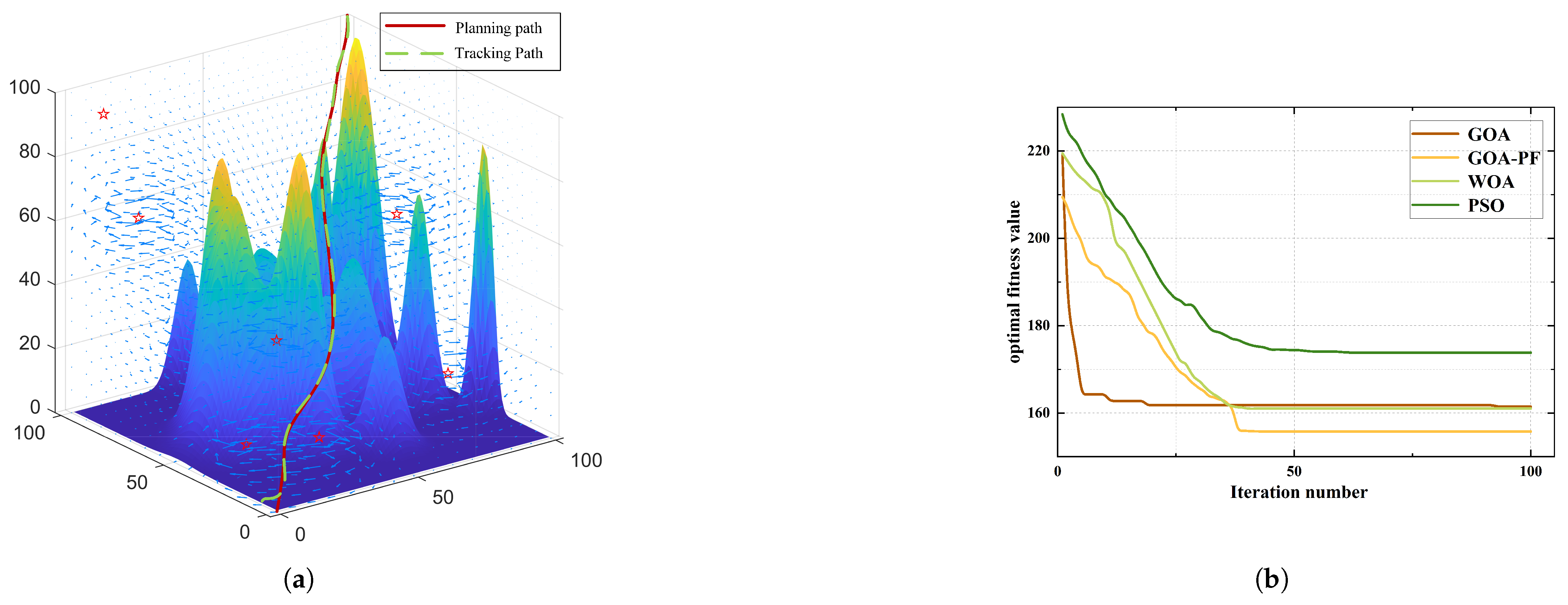
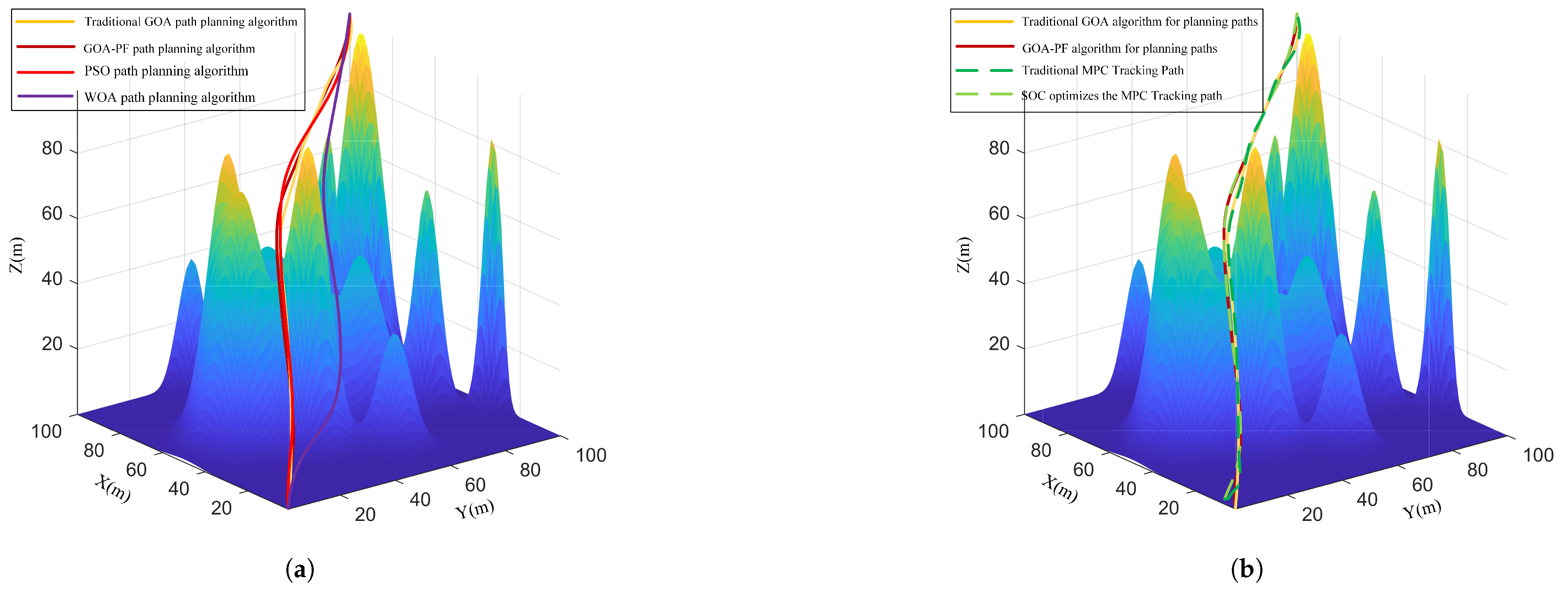
5.1. Path Planning and Tracking Control Results
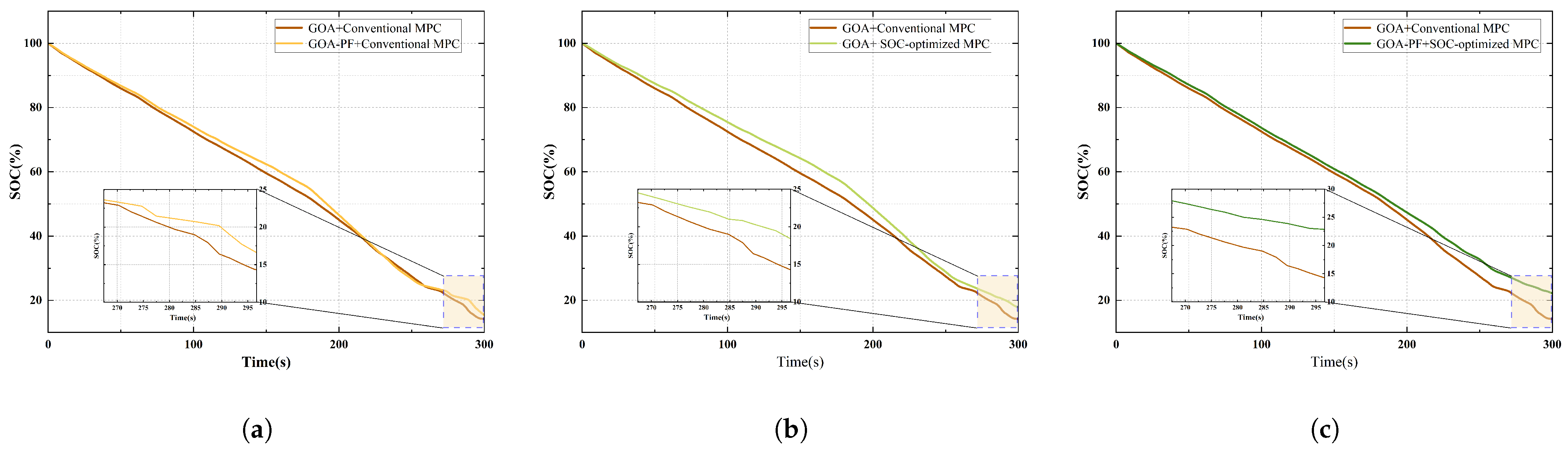
5.2. Comparative Analysis Without Perturbation
5.3. Comparative Analysis with Perturbation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean. Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Fenucci, D.; Fanelli, F.; Consensi, A.; Salavasidis, G.; Pebody, M.; Phillips, A.B. A multi-platform Guidance, Navigation and Control system for the autosub family of Autonomous Underwater Vehicles. Control. Eng. Pract. 2024, 146, 105902. [Google Scholar] [CrossRef]
- Heshmati-Alamdari, S.; Nikou, A.; Dimarogonas, D.V. Robust trajectory tracking control for underactuated autonomous underwater vehicles in uncertain environments. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1288–1301. [Google Scholar] [CrossRef]
- Piskur, P.; Szymak, P.; Przybylski, M.; Naus, K.; Jaskólski, K.; Żokowski, M. Innovative energy-saving propulsion system for low-speed biomimetic underwater vehicles. Energies 2021, 14, 8418. [Google Scholar] [CrossRef]
- Wang, Z.; Xiang, X.; Duan, Y.; Yang, S. Adversarial deep reinforcement learning based robust depth tracking control for underactuated autonomous underwater vehicle. Eng. Appl. Artif. Intell. 2024, 130, 107728. [Google Scholar] [CrossRef]
- Liu, Z.; Ning, D.; Hou, J.; Zhang, F.; Liang, G. AUV path planning in a three-dimensional marine environment based on a novel multiple swarm co-evolutionary algorithm. Appl. Soft Comput. 2024, 164, 111933. [Google Scholar] [CrossRef]
- Wen, J.; Dai, H.; He, J.; Sun, L.; Gao, L. Intelligent Decision-Making Method for AUV Path Planning Against Ocean Current Disturbance Via Reinforcement Learning. IEEE Internet Things J. 2024, 11, 38965–38975. [Google Scholar] [CrossRef]
- Eimeni, S.N.H.; Khosravi, A. An Online Energy Management System Based on Minimum-Time Speed Planning for Autonomous Underwater Vehicles. IEEE Trans. Intell. Veh. 2024, 1–12. [Google Scholar] [CrossRef]
- Panda, J. Machine learning for naval architecture, ocean and marine engineering. J. Mar. Sci. Technol. 2023, 28, 1–26. [Google Scholar] [CrossRef]
- Panda, J.P.; Mitra, A.; Warrior, H.V. A review on the hydrodynamic characteristics of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part J. Eng. Marit. Environ. 2021, 235, 15–29. [Google Scholar] [CrossRef]
- Li, L.; Li, Y.; Wang, Y.; Xu, G.; Wang, H.; Gao, P.; Feng, X. Multi-AUV coverage path planning algorithm using side-scan sonar for maritime search. Ocean Eng. 2024, 300, 117396. [Google Scholar] [CrossRef]
- Sun, M.; Xiao, X.; Luan, T.; Zhang, X.; Wu, B.; Zhen, L. The path planning algorithm for UUV based on the fusion of grid obstacles of artificial potential field. Ocean Eng. 2024, 306, 118043. [Google Scholar] [CrossRef]
- Xu, Z.; Shen, Y.; Xie, Z.; Liu, Y. Research on Autonomous Underwater Vehicle Path Optimization Using a Field Theory-Guided A* Algorithm. J. Mar. Sci. Eng. 2024, 12, 1815. [Google Scholar] [CrossRef]
- Gong, Y.J.; Huang, T.; Ma, Y.N.; Jeon, S.W.; Zhang, J. Mtrajplanner: A multiple-trajectory planning algorithm for autonomous underwater vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3714–3727. [Google Scholar] [CrossRef]
- Wen, J.; Yang, J.; Wang, T. Path planning for autonomous underwater vehicles under the influence of ocean currents based on a fusion heuristic algorithm. IEEE Trans. Veh. Technol. 2021, 70, 8529–8544. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimisation algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef]
- Mirjalili, S.Z.; Mirjalili, S.; Saremi, S.; Faris, H.; Aljarah, I. Grasshopper optimization algorithm for multi-objective optimization problems. Appl. Intell. 2018, 48, 805–820. [Google Scholar] [CrossRef]
- Ingle, K.K.; Jatoth, R.K. Non-linear channel equalization using modified grasshopper optimization algorithm. Appl. Soft Comput. 2024, 153, 110091. [Google Scholar] [CrossRef]
- Yan, Z.; Yan, J.; Wu, Y.; Cai, S.; Wang, H. A novel reinforcement learning based tuna swarm optimization algorithm for autonomous underwater vehicle path planning. Math. Comput. Simul. 2023, 209, 55–86. [Google Scholar] [CrossRef]
- Liang, X.; Dong, Z.; Hou, Y.; Mu, X. Energy-saving optimization for spacing configurations of a pair of self-propelled AUV based on hull form uncertainty design. Ocean Eng. 2020, 218, 108235. [Google Scholar] [CrossRef]
- Li, B.; Gao, X.; Huang, H.; Yang, H. Improved adaptive twisting sliding mode control for trajectory tracking of an AUV subject to uncertainties. Ocean Eng. 2024, 297, 116204. [Google Scholar] [CrossRef]
- Sun, Y.; Du, Y.; Qin, H. Distributed adaptive neural network constraint containment control for the benthic autonomous underwater vehicles. Neurocomputing 2022, 484, 89–98. [Google Scholar] [CrossRef]
- Tang, J.; Dang, Z.; Deng, Z.; Li, C. Adaptive fuzzy nonlinear integral sliding mode control for unmanned underwater vehicles based on ESO. Ocean Eng. 2022, 266, 113154. [Google Scholar] [CrossRef]
- Yang, N.; Chang, D.; Amini, M.R.; Johnson-Robersor, M.; Sun, J. Energy management for autonomous underwater vehicles using economic model predictive control. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 2639–2644. [Google Scholar] [CrossRef]
- Miao, J.; Wang, Y.; Deng, K.; Sun, X.; Liu, W.; Guo, Z. PECLOS path-following control of underactuated AUV with multiple disturbances and input constraints. Ocean Eng. 2023, 284, 115236. [Google Scholar] [CrossRef]
- Esmaiel, H.; Sun, H. Energy Harvesting for TDS-OFDM in NOMA-Based Underwater Communication Systems. Sensors 2022, 22, 5751. [Google Scholar] [CrossRef]
- Mostafa, M.; Esmaiel, H.; Omer, O.A. Hybrid energy efficient routing protocol for UWSNs. In Proceedings of the 2020 2nd International Conference on Computer and Information Sciences (ICCIS), Sakaka, Saudi Arabia, 13–15 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, S.; Cao, Y.; Zhu, S.; Guo, Z.; Wen, S. Robust model predictive control for continuous nonlinear systems with the quasi-infinite adaptive horizon algorithm. J. Frankl. Inst. 2024, 361, 748–763. [Google Scholar] [CrossRef]
- Xu, B.; Wang, Z.; Li, W.; Yu, Q. Distributed robust model predictive control-based formation-containment tracking control for autonomous underwater vehicles. Ocean Eng. 2023, 283, 115210. [Google Scholar] [CrossRef]
- Sangi, R.; Müller, D. A novel hybrid agent-based model predictive control for advanced building energy systems. Energy Convers. Manag. 2018, 178, 415–427. [Google Scholar] [CrossRef]
- Ryzhov, A.; Ouerdane, H.; Gryazina, E.; Bischi, A.; Turitsyn, K. Model predictive control of indoor microclimate: Existing building stock comfort improvement. Energy Convers. Manag. 2019, 179, 219–228. [Google Scholar] [CrossRef]
- Dong, D.; Ye, H.; Luo, W.; Wen, J.; Huang, D. Fast Trajectory Tracking Control Algorithm for Autonomous Vehicles Based on the Alternating Direction Multiplier Method (ADMM) to the Receding Optimization of Model Predictive Control (MPC). Sensors 2023, 23, 8391. [Google Scholar] [CrossRef]
- Schwedersky, B.B.; Flesch, R.C. Nonlinear model predictive control algorithm with iterative nonlinear prediction and linearization for long short-term memory network models. Eng. Appl. Artif. Intell. 2022, 115, 105247. [Google Scholar] [CrossRef]
- Jia, Z.; Lu, H.; Li, S.; Zhang, W. Distributed dynamic rendezvous control of the AUV-USV joint system with practical disturbance compensations using model predictive control. Ocean Eng. 2022, 258, 111268. [Google Scholar] [CrossRef]
- McCue, L. Handbook of marine craft hydrodynamics and motion control [bookshelf]. IEEE Control. Syst. Mag. 2016, 36, 78–79. [Google Scholar] [CrossRef]
- Gong, P.; Yan, Z.; Zhang, W.; Tang, J. Lyapunov-based model predictive control trajectory tracking for an autonomous underwater vehicle with external disturbances. Ocean Eng. 2021, 232, 109010. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| m | 185 kg | 100 kg/s | |
| kg | 200 kg/m | ||
| kg | 100 kg/s | ||
| kg | 200 kg/m | ||
| 40 kgm2 | 50 kgm2/(rad) | ||
| kgm2 | 100 kgm2/rad | ||
| 40 kgm2 | 50 kgm2/(rad) | ||
| kgm2 | 100 kgm2/rad | ||
| 70 kg/s | 100 kg/m | ||
| −0.2896 | 0.0084 | ||
| −0.1114 | 0.0283 | ||
| 0.5420 | 0.0947 | ||
| 0.0274 | D | 10 N·s/m |
| Parameters | Value |
|---|---|
| 0.2 s | |
| 50 | |
| 5 | |
| 1 | |
| 0.004 | |
| l | 1.5 |
| f | 0.5 |
| Algorithm | Path Lengths Under Different Algorithms Without Ocean Currents (m) | Path Lengths Under Different Algorithms for the Ocean Current Case (m) |
|---|---|---|
| GOA | 205.14 | 206.32 |
| PSO | 206.89 | 207.51 |
| WOA | 210.13 | 209.86 |
| GOA-PF | 208.11 | 221.83 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, G.; Xu, Z.; Wang, F.; Zhang, X. Energy-Optimized Path Planning and Tracking Control Method for AUV Based on SOC State Estimation. J. Mar. Sci. Eng. 2025, 13, 1074. https://doi.org/10.3390/jmse13061074
Yang G, Xu Z, Wang F, Zhang X. Energy-Optimized Path Planning and Tracking Control Method for AUV Based on SOC State Estimation. Journal of Marine Science and Engineering. 2025; 13(6):1074. https://doi.org/10.3390/jmse13061074
Chicago/Turabian StyleYang, Guangyi, Zhenning Xu, Feng Wang, and Xiaoyu Zhang. 2025. "Energy-Optimized Path Planning and Tracking Control Method for AUV Based on SOC State Estimation" Journal of Marine Science and Engineering 13, no. 6: 1074. https://doi.org/10.3390/jmse13061074
APA StyleYang, G., Xu, Z., Wang, F., & Zhang, X. (2025). Energy-Optimized Path Planning and Tracking Control Method for AUV Based on SOC State Estimation. Journal of Marine Science and Engineering, 13(6), 1074. https://doi.org/10.3390/jmse13061074