

An Integrated Safety Monitoring and Pre-Warning System for Fishing Vessels



Abstract
1. Introduction
1.1. Motivation
1.2. Contributions and Novelty
- A real-time data acquisition and processing system has been developed through the integration of a nine-axis sensor, temperature and humidity sensors, a GPS module, and a surveillance camera. The integrated system is specifically designed to monitor vessel attitude, environmental conditions, and the vessel’s location. The use of 4G/5G wireless communication ensures low-latency data transmission without relying on satellite networks.
- The system is characterized by cost-effective and modular architecture, allowing for flexible deployment and scalability across fishing vessels of different types and sizes, including those operating in small-scale or resource-limited settings.
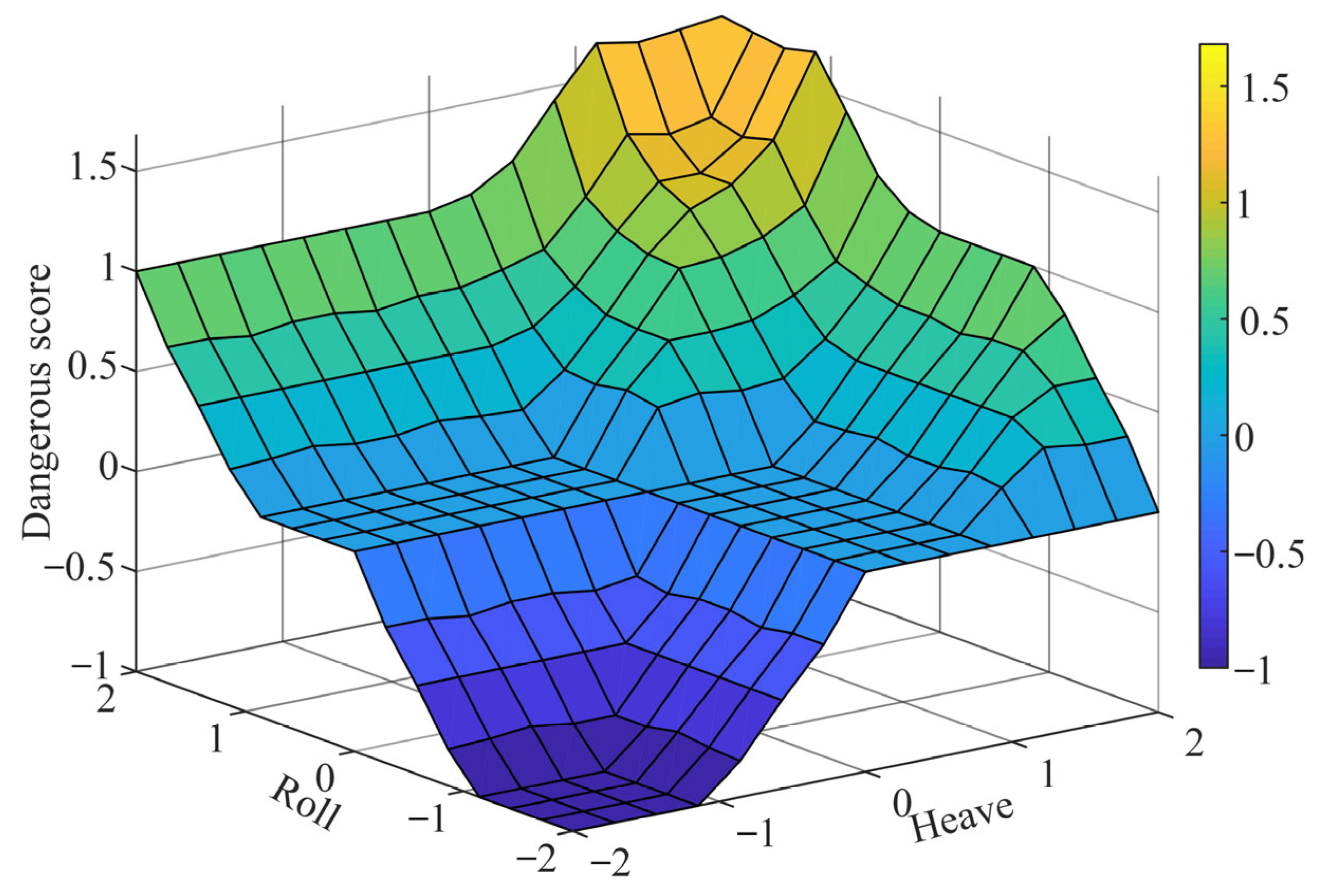
- A fuzzy logic-based decision support algorithm is designed to compute a “danger score” for evaluating vessel safety status, effectively handling uncertainties in maritime environments and providing timely alerts to crew members.
- Field experiments conducted in the Zhoushan Sea area validate the effectiveness of the proposed system, demonstrating its ability to improve safety.
2. Literature Review
3. Materials and Methods
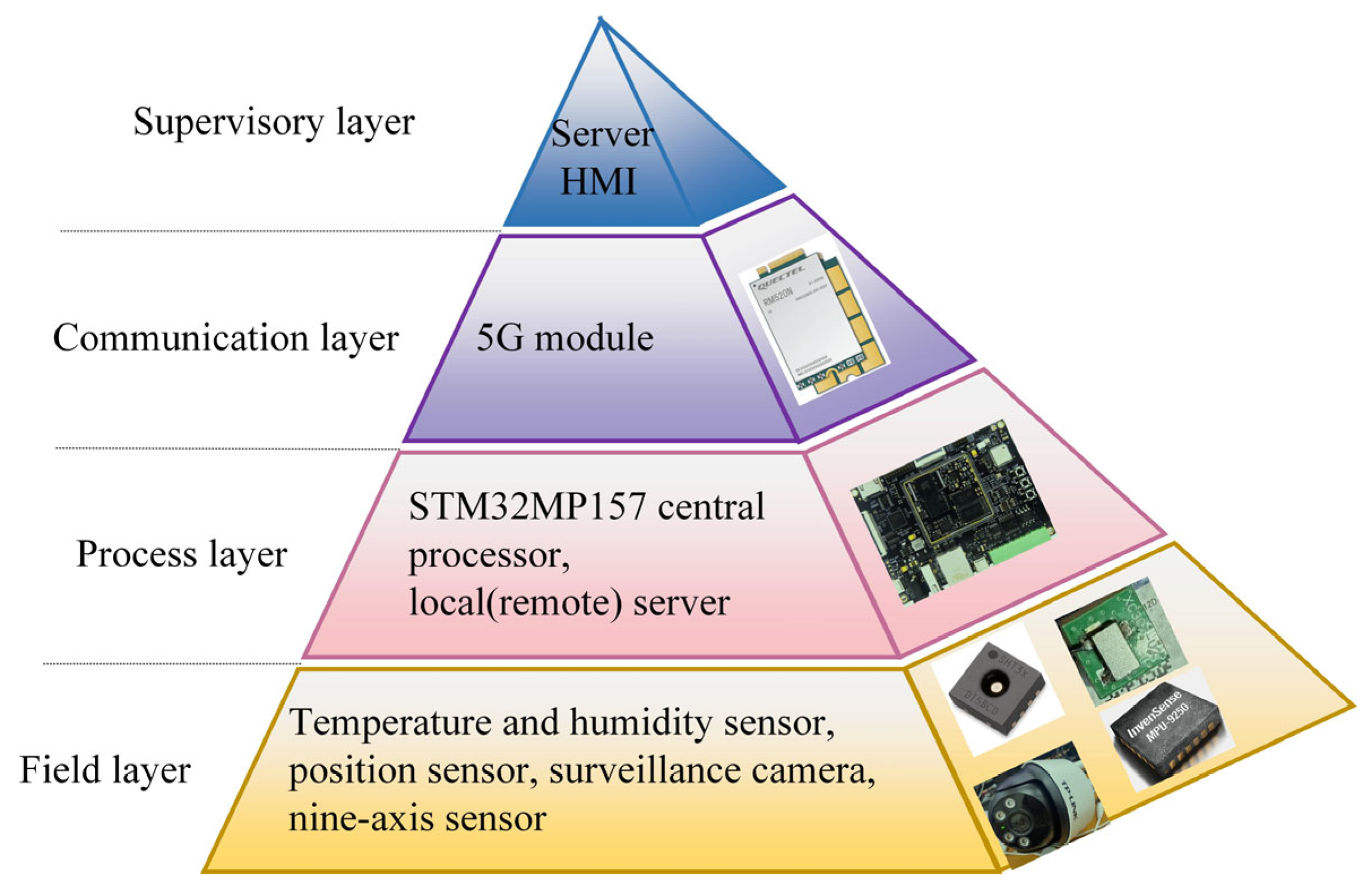
3.1. Structure of the Proposed Integrated Pre-Warning System
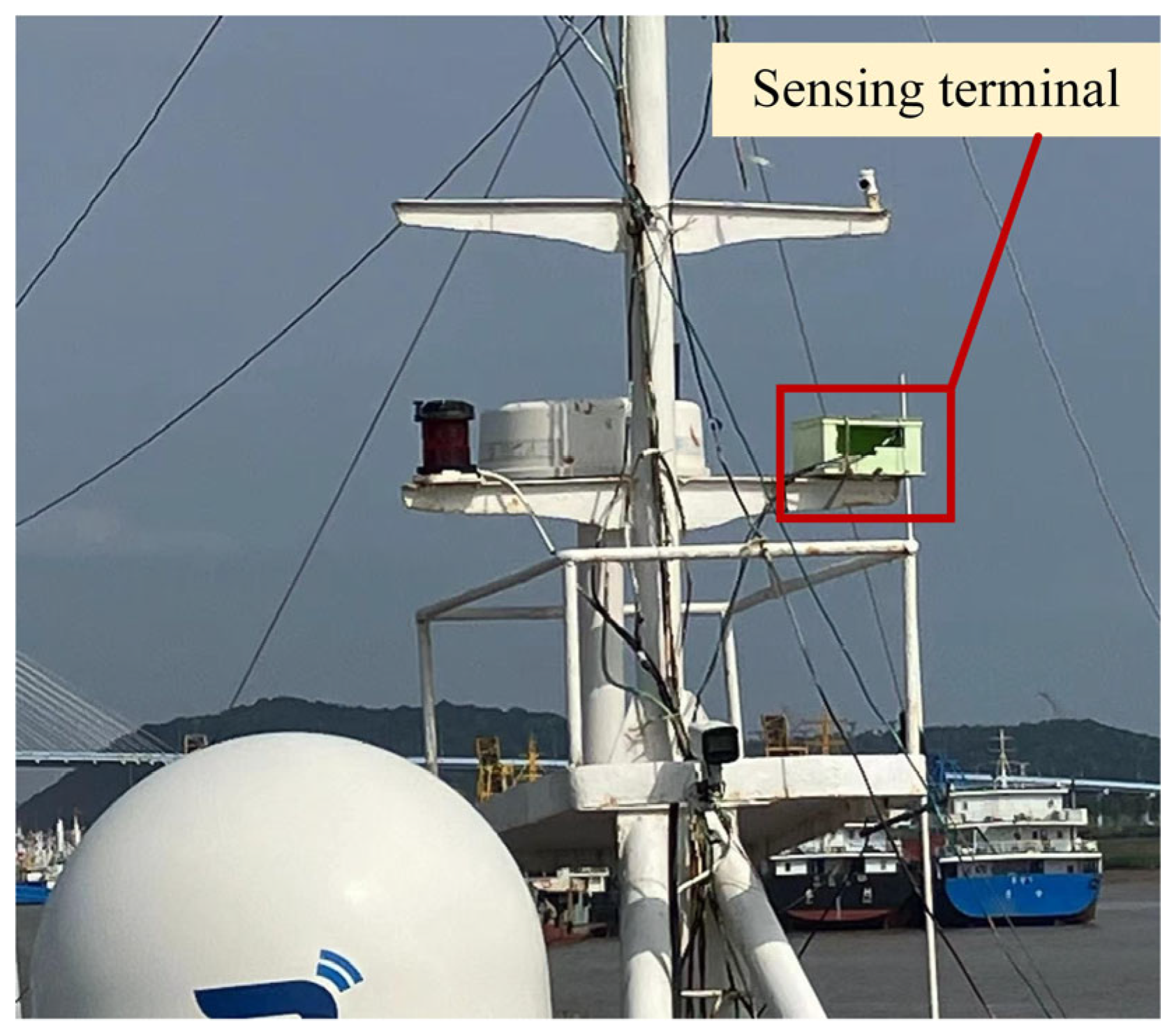
- Field layer: This layer was employed to realize the data acquisition, directly collecting temperature, humidity, latitude, longitude, surveillance images, and vessel motion attitude (roll, pitch, and yaw angles) information by a temperature and humidity sensor, GPS, a surveillance camera and a nine-axis sensor mounted on the main deck. The collected data are transmitted to the process layer for further analysis.
- Process layer: This layer included the STM32MP157 microprocessor that serves as the central processing unit. It handles sensor data input via serial or Ethernet ports and performs initial preprocessing, including data filtering and feature extraction. This layer accommodates several key software modules:
- A sensor data preprocessing module, employing signal denoising techniques (e.g., Kalman filtering and moving average smoothing) to eliminate outliers and improve data reliability.
- A multi-source data fusion module, which combines inertial and environmental information into structured data frames.
- A local storage system, facilitating data retention.
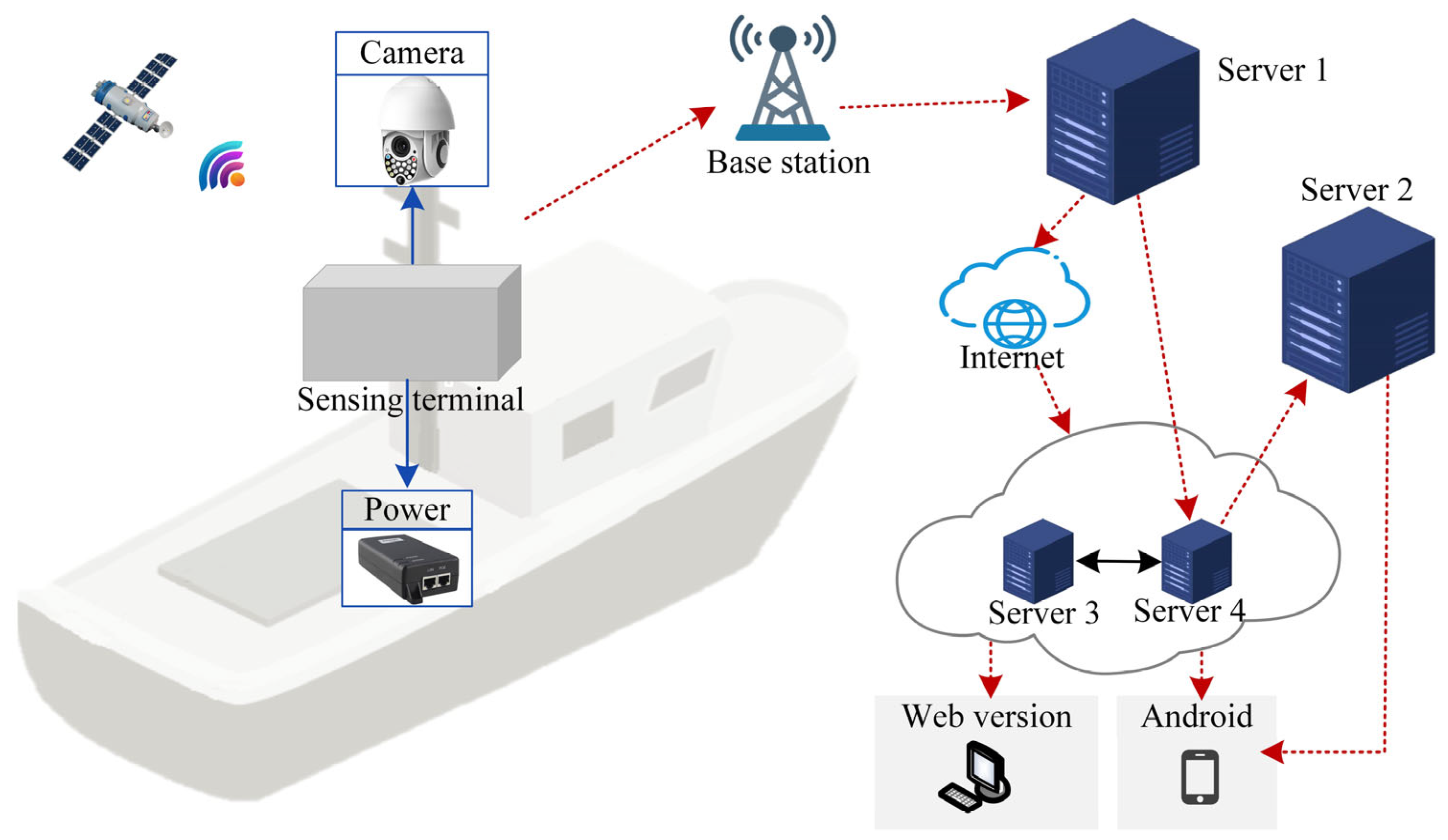
- Communication layer: The communication layer employs a 5G module to facilitate bidirectional data transmission between the terminal and the server, enabling remote control of the terminal. This terminal can connect with shipboard sensors to receive data in real time, such as location, speed, and environmental parameters. Leveraging the high-speed and low-latency characteristics of 5G networks, it swiftly transmits the data to the shore-based base station, ensuring that shore-based personnel can promptly access the ship’s operational status.
- Supervisory layer: This layer includes an integrated pre-warning decision support system, which is used to monitor the vessel motion attitude in real time, calculate the “danger score”, and pops up notifications or sends an SMS when attention is needed.
- A vessel attitude anomaly assessment module, constructed using fuzzy logic inference algorithms to calculate dynamic danger levels based on real-time posture, acceleration, and environmental parameters.
- An alert management subsystem, which compares the computed risk levels against threshold criteria and triggers corresponding alarms.
- A graphical user interface (GUI) developed with Vue.js, and a back-end management service built on Spring Boot and MyBatis, which collectively enable real-time visualization, data querying, and remote configuration.
3.2. Hardware System Structure
3.3. Operation Mechanism for the Integrated System
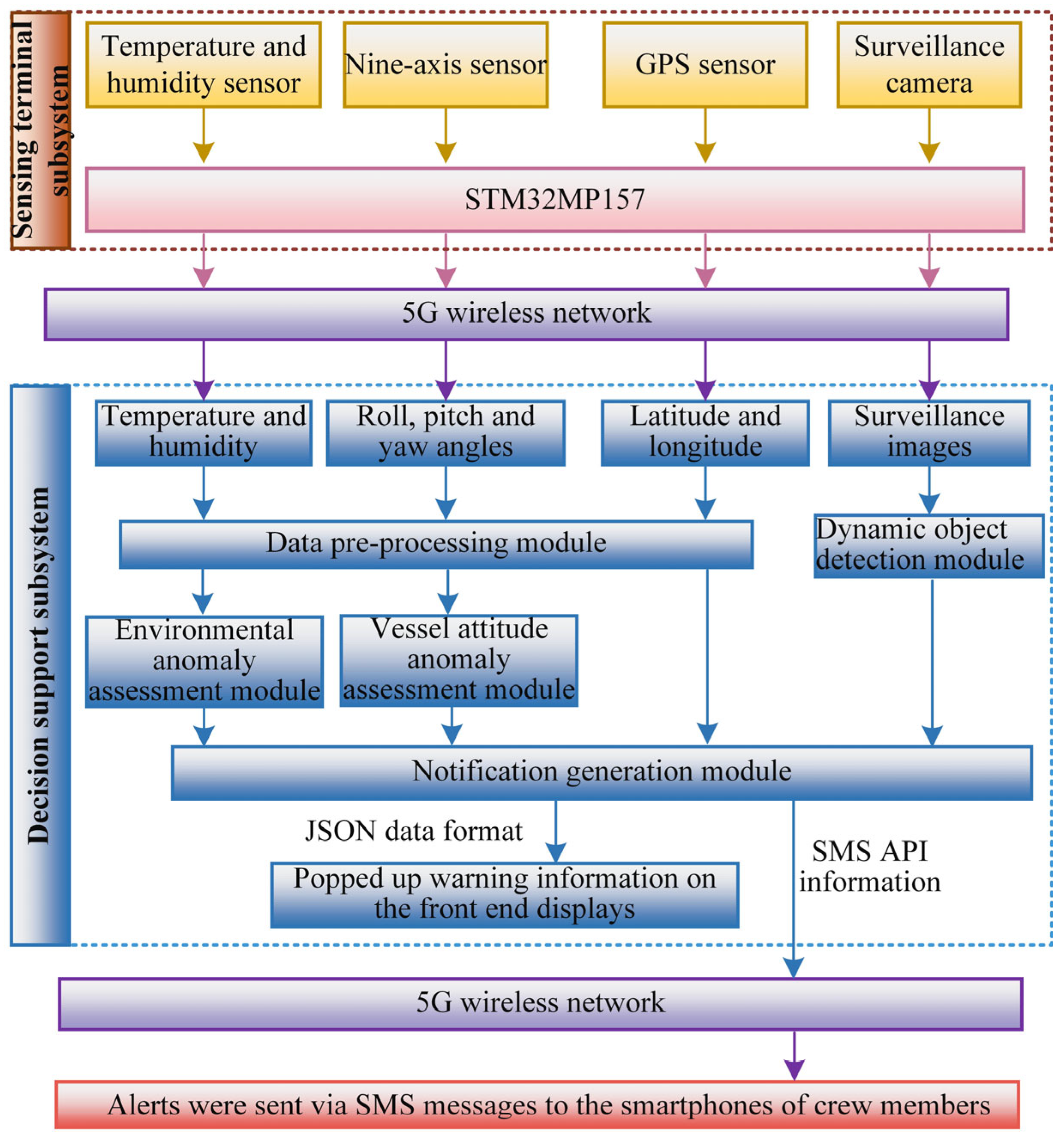
- Data preprocessing module: Within this module, two sequential filtering processes are executed. Initially, the Kalman filter is applied to the raw data from the nine-axis sensor. Environmental data, including temperature and humidity, undergo smoothing via a moving average filter. This process entails averaging sensor readings across a designated time window to mitigate short-term fluctuations and noise, thereby enhancing data stability.
- Vessel attitude anomaly assessment module: This module employs a fuzzy logic algorithm to calculate the “danger score” to predict the vessel’s attitude status; a detailed description can be seen in Section 3.5.2. If the “danger score” exceeds a predefined threshold, it sends alert messages to the notification generation module.
- Dynamic object detection module: Surveillance images are employed to monitor the cockpit and deck areas. It can detect if the cockpit is unattended or if there are personnel near the deck edges, and send alert messages to notification generation module, enhancing crew safety. The intelligent detection method used in this study is provided by the surveillance camera manufacturer TP-LINK, which enables the camera to automatically trigger alerts when personnel cross predefined boundary zones near the dock edges.
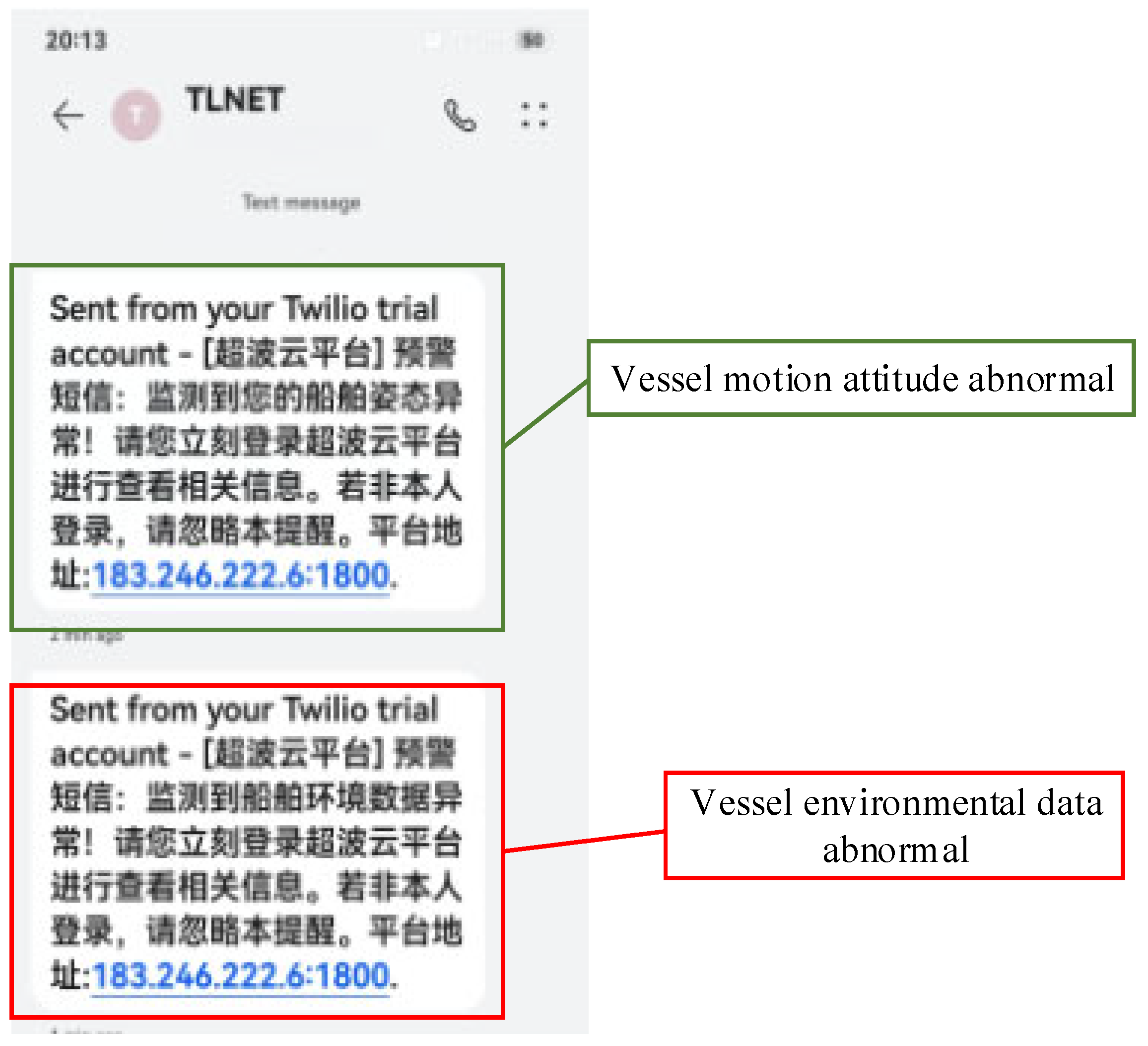
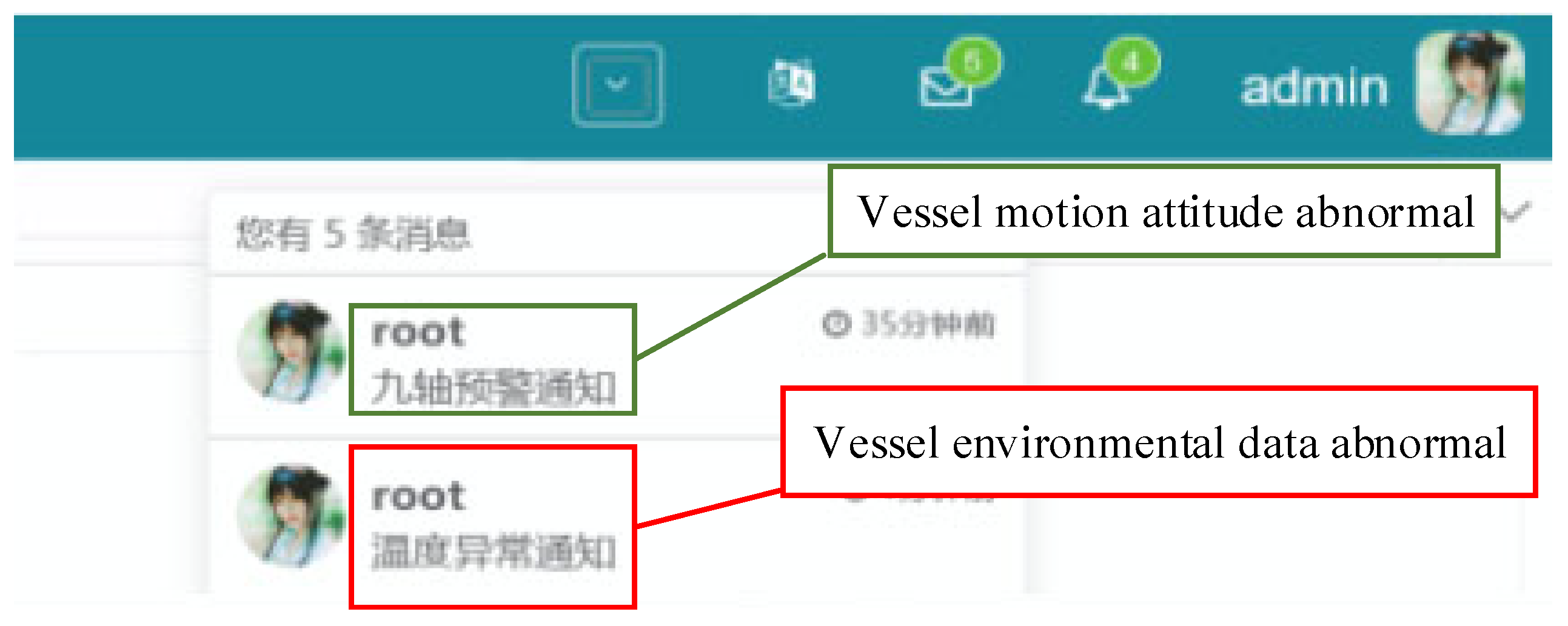
- Notification generation module: This module employs two notification ways, SMS alerts dispatched to crew members’ smartphones and real-time safety alerts displayed on a web platform. SMS alerts encompass comprehensive information, including the hazard score, type, and recommended responses, ensuring crew members are well informed and can act promptly. The web platform complements this by offering a visual representation of the vessel’s hazard status, incorporating real-time attitude data and hazard score trends, thereby facilitating continuous monitoring and swift decision-making.
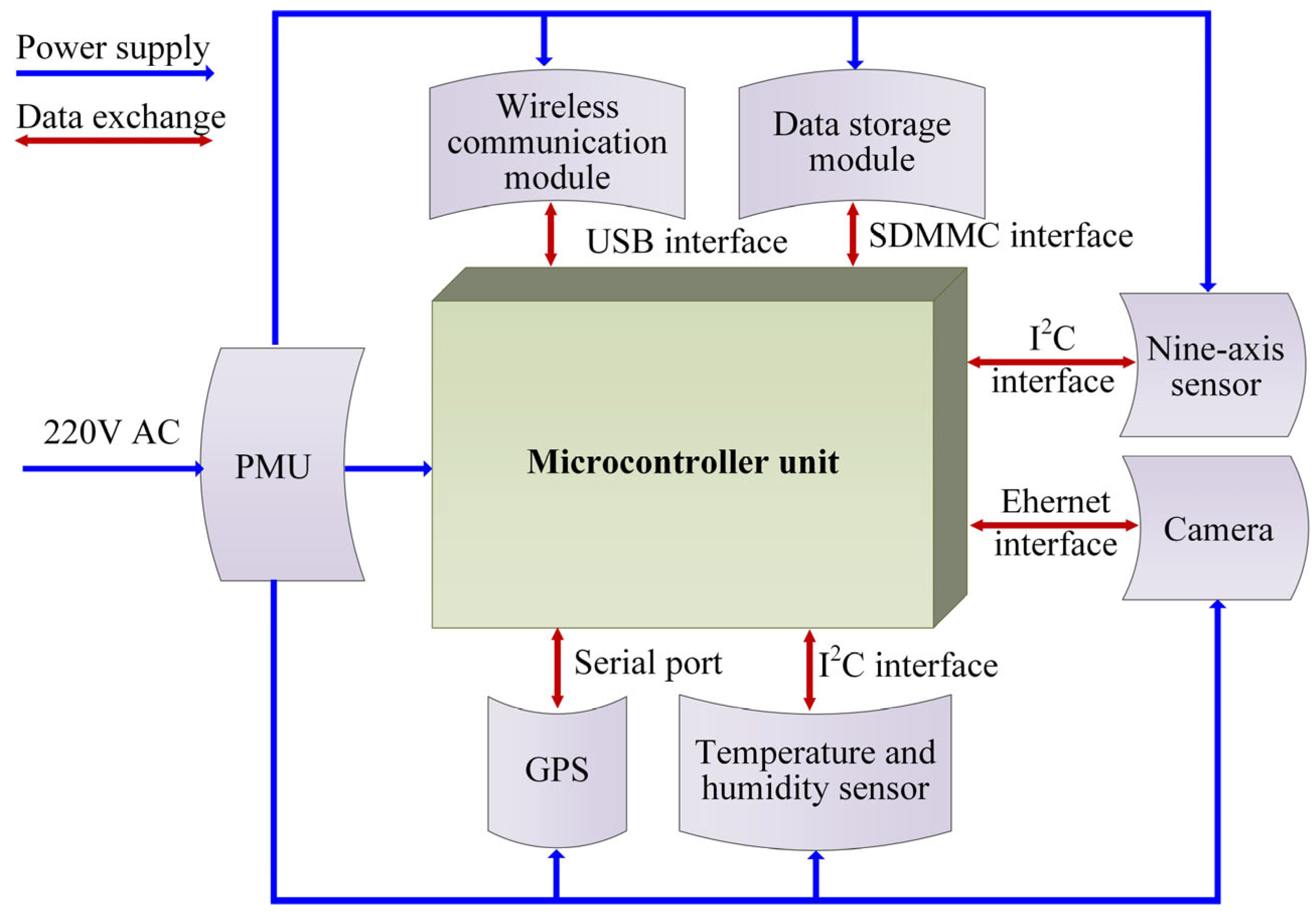
3.4. Sensing Terminal Subsystem Architecture
- Microcontroller Unit (module STM32MP157C): MP157C (STMicroelectronics, Grenoble, France) is a dual-core Arm® Cortex®-A7 microcontroller (up to 800 MHz) featuring Wi-Fi, Bluetooth, and multiple communication interfaces (Ethernet, USB, CAN, SPI, I2C, UART). It is powered by 12–24 VDC and programmed via STM32Cube Programmer. This study used Ethernet, USB, UART, and I2C ports. Its parameters are shown in Table 1.
- Power management unit (PMU): The PMU (Texas Instruments, Austin, TX, USA) is used to provide appropriate DC voltages for terminal components, for example, from 220VAC to 12VDC, 12VDC to 5VDC, and 5VDC to 3.3VDC.
- Nine-axis sensor: The JY901 provides real-time data on vessel movement, orientation, and speed. It combines a gyroscope, accelerometer, magnetometer, and digital motion sensor, delivering outputs at up to 200 Hz via the I2C interface.
- Wireless module: The RM500Q (Quectel Wireless Solutions Co., Ltd., Shanghai, China) 5G establishes cellular communication (5G/4G/3G) between the user and the terminal. It is connected to the central processing unit via a USB port and can switch to more reliable networks during severe weather or low signal conditions.
- Temperature and humidity sensor: SHT31 (Sensirion AG, Zurich, Switzerland) measures and reports real-time environmental temperature and humidity via the I2C interface, ensuring high accuracy and reliability [31].
- GPS: The BD-1612Z (BnStar Electronics Co., Ltd., Shenzhen, China) module determines the vessel’s location. It operates at 2.7–3.6 VDC and connects to the MCU through a UART interface.
- Storage module: The micro-SD memory card module (Shenzhen Atom Technology Co., Ltd., Shenzhen, China) stores data when the system cannot send them wirelessly. We can store, retrieve, and copy data when the module has problems.
- Camera: TL-IPC633P-A (TP-LINK Technology Co., Ltd., Shenzhen, China) camera provides a wide range of monitoring (horizontal angle 345°, vertical angle 123°) to ensure comprehensive coverage, minimize vulnerabilities, and maximize vessel safety.
3.5. Decision Support Subsystem
3.5.1. Interactive Monitoring Platform
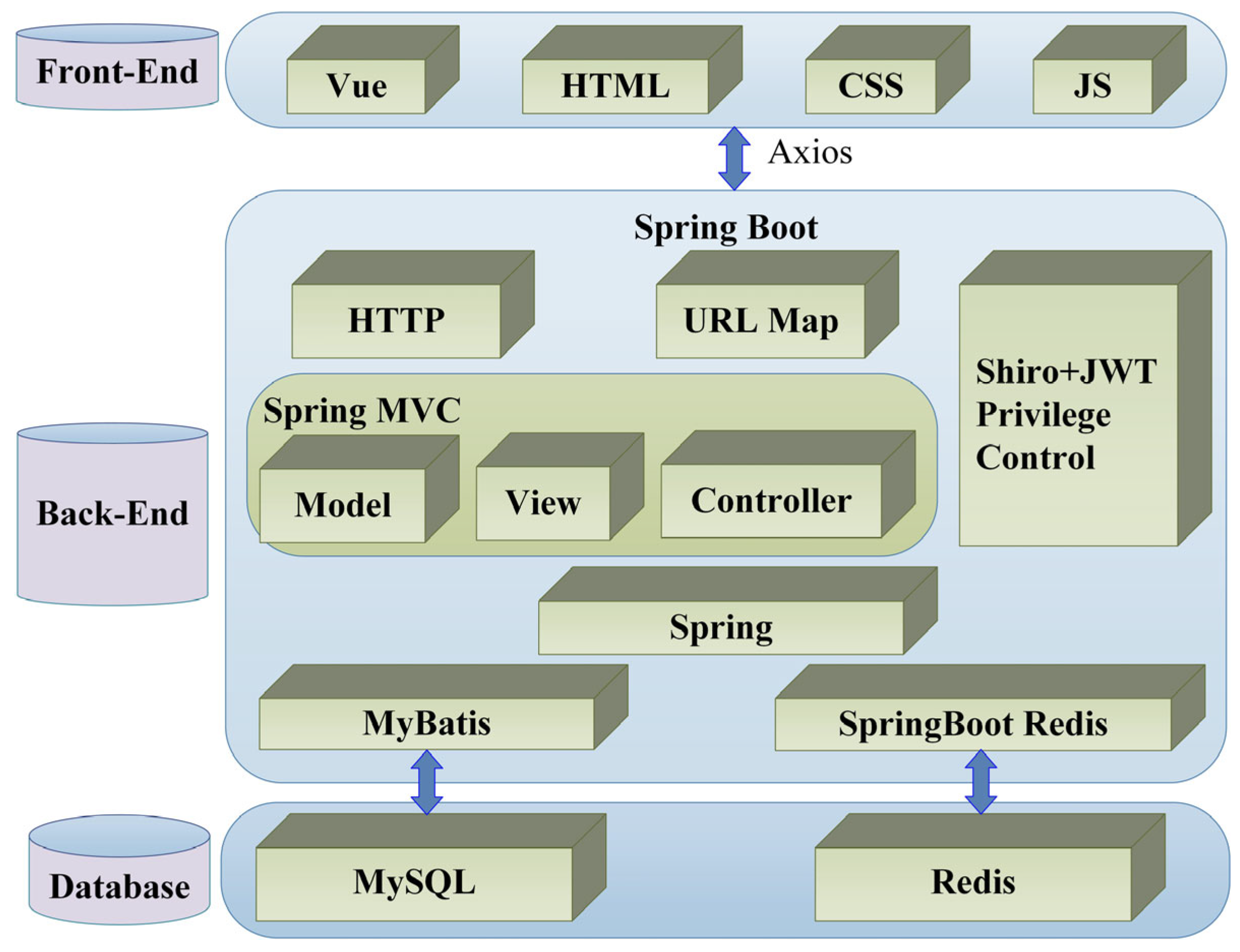
- Front-end: This is the process of handling the user’s visual perspective. In this study, Vue.js, a lightweight framework with features of easy integration, flexibility, and efficient rendering capabilities, was adopted for web front-end development.
- Back-end: Consists of code that communicates between the client browser and the database. In detail, this includes updating, managing, and monitoring application functionalities and data. In this study, Spring Boot, Spring MVC, and MyBatis were combined to implement the back-end platform, aiming to support a variety of widely used authentication methods, large relational and non-relational databases, a map-reduce framework, and cloud data services [34].
- Database: A collection of data that is stored systematically and allows for querying, updating, manipulating, and managing data in a very effective and logical way. MySQL databases were used in this study.
- Database Index Optimization: B-tree indexes are strategically applied to time-series sensor data and event logs, significantly accelerating database query efficiency and ensuring timely interface response.
- Thread Pool Algorithm: Concurrent tasks, such as sensor data parsing and alert event processing, are managed using thread pooling to prevent thread overload and improve system responsiveness under high-frequency input conditions.
- JWT (JSON Web Token): This stateless authentication mechanism ensures secure session control, allowing for only authorized users to access protected resources and functionalities.
- RBAC (Role-Based Access Control): Role-based permission allocation restricts system operations according to user types (e.g., admin, operator, observer), preventing unauthorized actions and improving auditability.
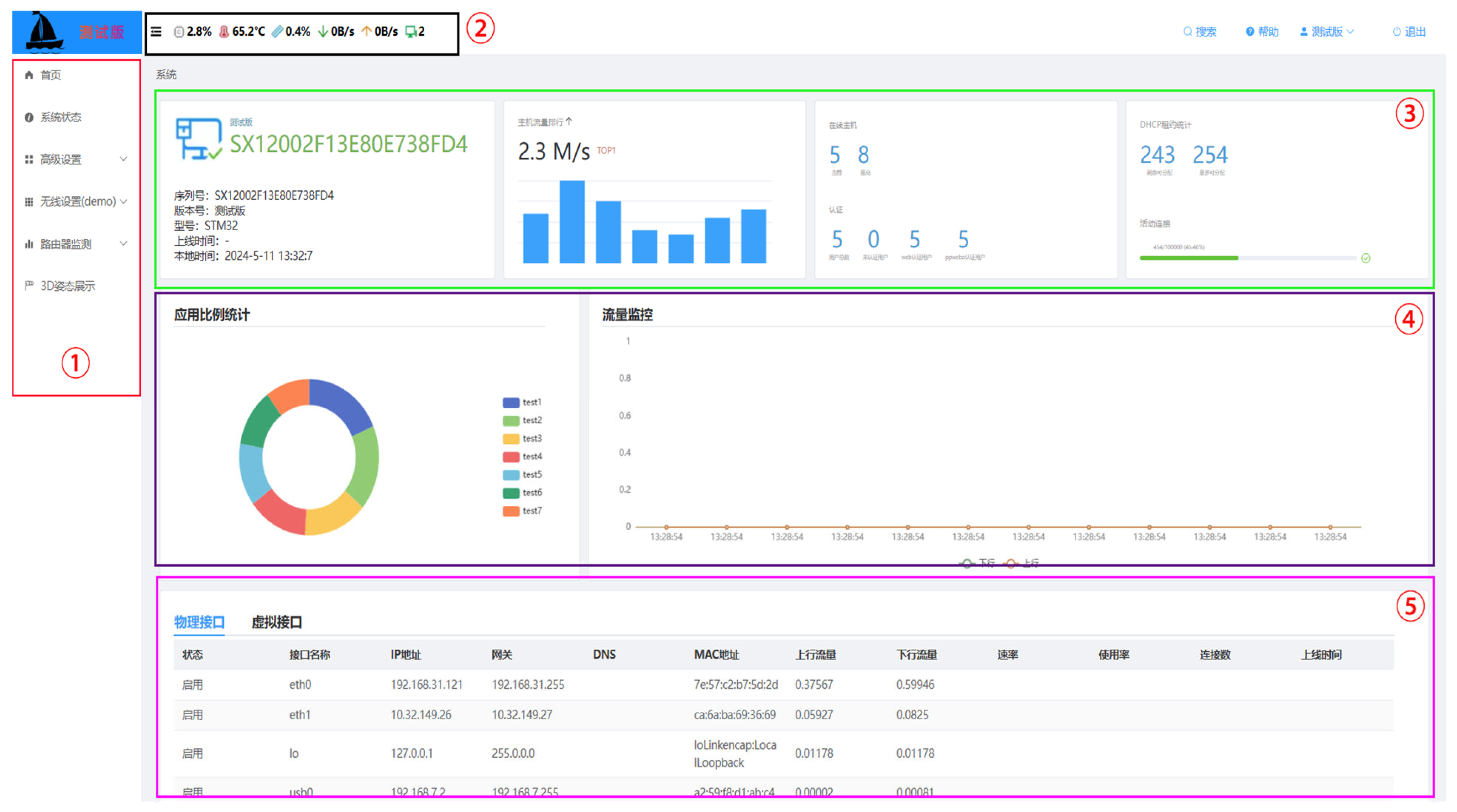
- System status: View the status of the WAN port, 5G module, and system information (system time, uptime, hardware version, etc.).
- Advanced settings: Configure the connection type and negotiation mode of the WAN port.
- Wireless settings: Set the basic parameters of the 5G wireless network (network mode, SSID name, enable SSID, channel width, etc.).
- Router monitoring: View wireless signal quality and real-time data as well as historical charts acquired from all sensors located in the vessel (temperature and humidity, acceleration, magnetometer of the vessel, surveillance image, etc.).
- 3D visualization: Three-dimensional display of vessels’ attitude.
3.5.2. Vessel Attitude Anomaly Assessment Method
4. Experiment Results and Discussion
4.1. Case Study
4.2. Results and Discussion
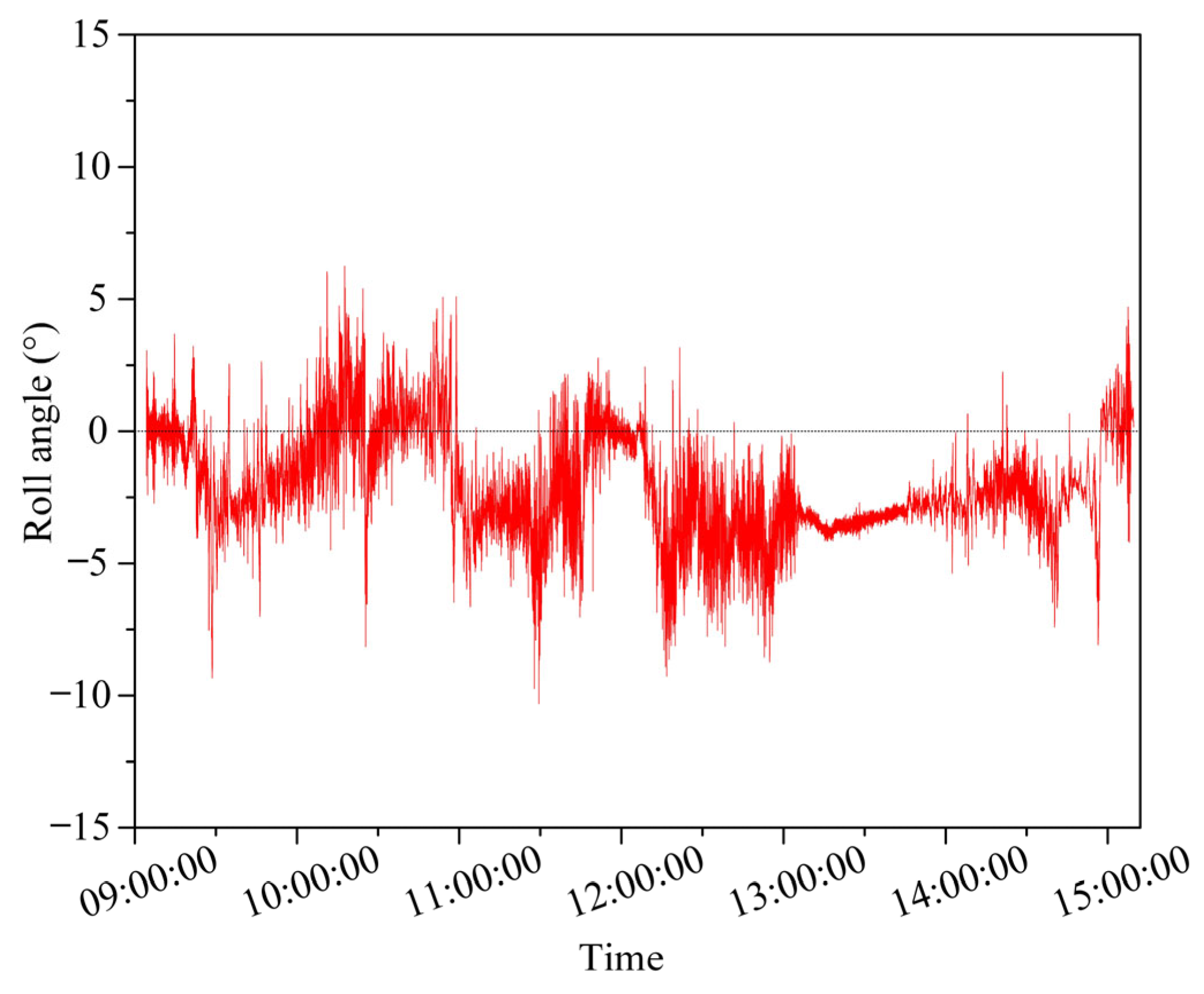
4.2.1. Vessel Attitude Motion Prediction
4.2.2. Warning Notification Result
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Davis, B.; Colbourne, B.; Molyneux, D. Analysis of fishing vessel capsizing causes and links to operator stability training. Saf. Sci. 2019, 118, 355–363. [Google Scholar] [CrossRef]
- FAO. The State of World Fisheries and Aquaculture 2024. Blue Transformation in Action; Food and Agriculture Organization: Rome, Italy, 2024. [Google Scholar]
- Uğurlu, F.; Yıldız, S.; Boran, M.; Uğurlu, Ö.; Wang, J. Analysis of fishing vessel accidents with Bayesian network and Chi-square methods. Ocean. Eng. 2020, 198, 106956. [Google Scholar] [CrossRef]
- Zhu, E. Analysis and evaluation system research on the safety status of fishing vessel in China. Master’s Thesis, Dalian Ocean University, Dalian, China, 2024. [Google Scholar]
- Jin, D.; Thunberg, E. An analysis of fishing vessel accidents in fishing areas off the northeastern United States. Saf. Sci. 2005, 43, 523–540. [Google Scholar] [CrossRef]
- Kim, S.-H.; Ryu, K.-J.; Lee, S.-H.; Lee, K.-H.; Kim, S.-H.; Lee, Y.-W. Enhancing sustainability through analysis and prevention: A study of fatal accidents on trap boats within the commercial fishing industry. Sustainability 2023, 15, 15382. [Google Scholar] [CrossRef]
- Jaremin, B.; Kotulak, E. Mortality in the polish small-scale fishing industry. Occup. Med. 2004, 54, 258–260. [Google Scholar] [CrossRef]
- FAO. The State of World Fisheries and Aquaculture Part 2: Selected Issues Facing Fishers and Aqua Culturists; Food and Agriculture Organization: Rome, Italy, 2000; pp. 1–142. [Google Scholar]
- Jensen, O.C.; Petursdottir, G.; Holmen, I.M.; Abrahamsen, A.; Lincoln, J. A review of fatal accident incidence rate trends in fishing. Int. Marit. Health 2014, 65, 47–52. [Google Scholar] [CrossRef]
- Håvold, J.I. Safety culture aboard fishing vessels. Saf. Sci. 2010, 48, 1054–1061. [Google Scholar] [CrossRef]
- Petursdottir, G.; Hannibalsson, O.; Turner, J.M. Safety at Sea as an Integral Part of Fisheries Management; Food and Agriculture Organization: Rome, Italy, 2001. [Google Scholar]
- Sunardi, S.; Choiron, M.; Sugiarto, S.; Setyarini, P.H.; Nurwahyudi, A. Fishing vessel safety in Indonesia: A study of accident characteristics and prevention strategies. Int. J. Saf. Secur. Eng. 2024, 14, 499–511. [Google Scholar] [CrossRef]
- Goular, D.; Cariou, J.P.; Fleury, D.; Planchat, C.; Gouyon, R.; Besson, C.; Bêche, A.; Megaides, V. Off-axis laser warning sensor. In Proceedings of the SPIE 7323, Laser Radar Technology and Applications XIV, SPIE, Orlando, FL, USA, 15–16 April 2009; Volume 7323, pp. 314–321. [Google Scholar]
- Qu, X.; Zheng, W. Design of ship anti-collision alarm system based on laser range-finding. Appl. Mech. Mater. 2014, 496–500, 1502–1505. [Google Scholar] [CrossRef]
- Liu, X.; Qin, F.; Niu, H. Design of ship anti-collision system based on microcontroller. In Proceedings of the 7th International Conference on Applied Science, Engineering and Technology (ICASET), Qingdao, China, 20–22 May 2017; pp. 233–237. [Google Scholar]
- Park, J.; Cho, Y.; Yoo, B.; Kim, J. Autonomous collision avoidance for unmanned surface ships using onboard monocular vision. In Proceedings of the OCEANS 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Bloisi, D.D.; Previtali, F.; Pennisi, A.; Nardi, D.; Fiorini, M. Enhancing automatic maritime surveillance systems with visual information. IEEE Trans. Intell. Transp. Syst. 2017, 18, 824–833. [Google Scholar] [CrossRef]
- Chen, X.; Wang, S.; Shi, C.; Wu, H.; Zhao, J.; Fu, J. Robust ship tracking via multi-view learning and sparse representation. J. Navig. 2019, 72, 176–192. [Google Scholar] [CrossRef]
- Bi, Q.; Wang, M.; Huang, Y.; Lai, M.; Liu, Z.; Bi, X. Ship collision avoidance navigation signal recognition via vision sensing and machine forecasting. IEEE Trans. Intell. Transp. Syst. 2023, 24, 11743–11755. [Google Scholar] [CrossRef]
- Evmides, N.; Odysseos, L.; Michaelides, M.P.; Herodotou, H. An intelligent framework for vessel traffic monitoring using AIS data. In Proceedings of the 2022 23rd IEEE International Conference on Mobile Data Management, Paphos, Cyprus, 6–9 June 2022; pp. 413–418. [Google Scholar]
- Pan, Z.; Deng, S. Vessel real-time monitoring system based on AIS temporal database. In Proceedings of the 2009 International Conference on Information Management, Innovation Management and Industrial Engineering, Xi’an, China, 26–27 December 2009; pp. 611–614. [Google Scholar]
- Alba, J.M.M.; Dy, G.C.; Viriña, N.I.M.; Samonte, M.J.C.; Cruz, F.R.G. Localized monitoring mobile application for automatic identification system (AIS) for sea vessels. In Proceedings of the 2020 IEEE 7th International Conference on Industrial Engineering and Applications, Bangkok, Thailand, 16–21 April 2020; pp. 790–794. [Google Scholar]
- Kazimierski, W.; Stateczny, A. Fusion of data from AIS and tracking radar for the needs of ECDIS. In Proceedings of the 2013 Signal Processing Symposium, Serock, Poland, 5–7 June 2013; pp. 45–52. [Google Scholar]
- Rong, H.; Teixeira, A.P.; Soares, C.G. Ship collision avoidance behaviour recognition and analysis based on AIS data. Ocean. Eng. 2022, 245, 110479. [Google Scholar] [CrossRef]
- Goudossis-Goudosis, A.; Katsikas, S. Towards a secure automatic identification system (AIS). J. Mar. Sci. Technol. 2018, 24, 410–423. [Google Scholar] [CrossRef]
- Tassetti, A.N.; Ferrà, C.; Fabi, G. Rating the effectiveness of fishery-regulated areas with AIS data. Ocean. Coast. Manag. 2019, 175, 90–97. [Google Scholar] [CrossRef]
- Šimunović, L.; Kavran, Z. Automatic identification system in maritime traffic and error analysis. J. Marit. Res. 2012, 1, 77–84. [Google Scholar]
- Ch, S.; Kumar, M.; Yadav, N.; Kumar, N.; Shiva, S. Tracking and emergency detection of inland vessel using GPS-GSM system. In Proceedings of the 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology, Bangalore, India, 19–20 May 2017; pp. 2039–2042. [Google Scholar]
- Aronica, S.; Fontana, I.; Giacalone, G.; Basilone, G.; La Gattuta, L.; Pulizzi, M.; Genovese, S.; Mangano, S.; Calandrino, P.; Mazzola, S.; et al. iSAFETY—Integrated system for an automatic support to fishing vessel security. In Proceedings of the 2017 Intelligent Systems Conference, London, UK, 7–8 September 2017; pp. 283–287. [Google Scholar]
- Tassetti, A.; Galdelli, A.; Pulcinella, J.; Mancini, A.; Bolognini, L. Addressing gaps in small-scale fisheries: A Low-cost tracking system. Sensors 2022, 22, 839. [Google Scholar] [CrossRef]
- Viet, T.P.; Nhat, T.T.D.; Minh, Q.N.; Van, T.T.; Nguyen, A.H.; Gia, H.N.V.; Tan, N.D.; Huu, P.N. Designing of system for monitoring and forecasting air environment using LSTM model. In Proceedings of the 2024 4th International Conference of Science and Information Technology in Smart Administration, Balikpapan, Indonesia, 12 July 2024; pp. 725–729. [Google Scholar]
- Michelin, M.; Elliott, M.; Bucher, M.; Zimring, M.; Sweeney, M. Catalyzing the Growth of Electronic Monitoring in Fisheries; California Environmental Associates and the Nature Conservancy: Sacramento, CA, USA, 2018. [Google Scholar]
- Hao, L.; Zhang, J.; Ma, X. Design and implementation of simulation training system based on MVC architecture. IOP Conf. Ser. Mater. Sci. Eng. 2019, 563, 052043. [Google Scholar] [CrossRef]
- Madurapperuma, I.H.; Shafana, M.S.; Sabani, M.J.A. State-of-art frameworks for front-end and back-end web development. In Proceedings of the 2nd International Conference on Science and Technology, Oluvil, Sri Lanka, 24 August 2022; pp. 62–67. [Google Scholar]
- Cademartori, G.; Oneto, L.; Valdenazzi, F.; Coraddu, A.; Gambino, A.; Anguita, D. A review on ship motions and quiescent periods prediction models. Ocean. Eng. 2023, 280, 114822. [Google Scholar] [CrossRef]
- Yang, X.; Pota, H.; Garratt, M.; Ugrinovskii, V.A. Ship motion prediction for maritime flight operations. IFAC Proc. Vol. 2008, 41, 12407–12412. [Google Scholar] [CrossRef]
- Anguita, D.; Necrisi, R.; Sterpi, D.; Tozzi, D. A prediction of ship motions with a support vector machine. In Proceedings of the International Conference on Modeling, Identification and Control, Innsbruck, Austria, 18–21 February 2002. [Google Scholar]
- Song, C.; Zhang, X.; Zhang, G. Attitude prediction of ship coupled heave–pitch motions using nonlinear innovation via full-scale test data. Ocean. Eng. 2022, 264, 112524. [Google Scholar] [CrossRef]
- Liu, D.G.; Zheng, Z.Y.; Wu, Z.L. Review on safety assessment for ships under heavy sea. J. Traffic Transp. Eng. 2003, 3, 114–118. [Google Scholar]
- Wang, Y.-T.; Gu, W.-X. Safety Evaluation of Fishing Vessels in Stormy Weather. J. Dalian Ocean. Univ. 1996, 11, 15–23. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Metric | Description |
|---|---|---|
| 1 | MCU | 32-bit dual-core Arm® Cortex®-A7 |
| 2 | Power | 5 V DC |
| 3 | Input/output voltage | 3.3 V DC |
| 4 | Band | 650 MHZ |
| 5 | WiFi protocol | IEEE 802.11/a/b/g/n/ |
| 6 | WiFi frequency | 2.4 GHz to 2.497 GHz, 4.9 GHz to 5.845 GHz |
| 7 | Bluetooth | V4.0, 2.402 GHz~2.480 GHz |
| 8 | Memory | DDR3L 16/32-bit 512 MB, 4 GB eMMC |
| 9 | Wireless antenna | PCB |
| 10 | Ethernet | 10 M/100 M/1000 Mbps |
| No. | Item | Cost = Unit × Quantities |
|---|---|---|
| 1 | MCU | USD 139.40 = 139.40 × 1 |
| 2 | Wireless module | USD 123.75 = 123.75 × 1 |
| 3 | Surveillance camera | USD 96.29 = 96.29 × 1 |
| 4 | GPS module | USD 4.12 = 4.12 × 1 |
| 5 | Temperature and humidity sensor | USD 1.10 = 1.10 × 1 |
| 6 | Nine axis sensor | USD 13.48 = 13.48 × 1 |
| 7 | Cable | USD 7.5 = 0.25 × 30 |
| 8 | Waterproof joint | USD 4.13 = 4.13 × 1 |
| 9 | Sealing materials | USD 9.63 = 9.63 × 1 |
| Total | USD 399.4 | |
| HNB | HNS | HZR | |||||||||||||||
| R | P | R | P | R | P | ||||||||||||
| PNB | PNS | PZR | PPS | PPB | PNB | PNS | PZR | PPS | PPB | PNB | PNS | PZR | PPS | PPB | |||
| RNB | SNB | SNB | SNS | SNS | SZR | RNB | SNB | SNB | SNS | SNS | SZR | RNB | SNS | SNS | SZR | SZR | SPS |
| RNS | SNB | SNB | SNS | SNS | SZR | RNS | SNB | SNS | SNS | SZR | SZR | RNS | SNS | SNS | SZR | SZR | SPS |
| RZR | SNS | SNS | SZR | SZR | SPS | RZR | SNS | SNS | SZR | SZR | SPS | RZR | SZR | SZR | SZR | SZR | SPS |
| RPS | SNS | SNS | SZR | SZR | SPS | RPS | SNS | SZR | SZR | SPS | SPS | RPS | SZR | SZR | SZR | SPS | SPS |
| RPB | SZR | SZR | SPS | SPS | SPS | RPB | SZR | SZR | SPS | SPS | SPB | RPB | SPS | SPS | SPS | SPB | SPB |
| HPS | HPB | If H is HNB and R is RNB and P is PNB then S is SNB. If H is HNB and R is RNB and P is PNS then S is SNB. If H is HNS and R is RNS and P is PNS then S is SNS. If H is HNS and R is RNS and P is PPS then S is SZR. | |||||||||||||||
| R | P | R | P | ||||||||||||||
| PNB | PNS | PZR | PPS | PPB | PNB | PNS | PZR | PPS | PPB | ||||||||
| RNB | SNS | SZR | SZR | SZR | SPS | RNB | SZR | SZR | SPS | SPS | SPS | ||||||
| RNS | SNS | SZR | SZR | SPS | SPS | RNS | SZR | SZR | SPS | SPS | SPB | ||||||
| RZR | SZR | SZR | SZR | SPS | SPB | RZR | SPS | SPS | SPS | SPB | SPB | ||||||
| RPS | SZR | SPS | SPS | SPS | SPB | RPS | SPS | SPS | SPB | SPB | SPB | ||||||
| RPB | SPS | SPS | SPB | SPB | SPB | RPB | SPS | SPB | SPB | SPB | SPB | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Lin, J.; Ding, J.; Zheng, B.; Qin, L. An Integrated Safety Monitoring and Pre-Warning System for Fishing Vessels. J. Mar. Sci. Eng. 2025, 13, 1049. https://doi.org/10.3390/jmse13061049
Yang K, Lin J, Ding J, Zheng B, Qin L. An Integrated Safety Monitoring and Pre-Warning System for Fishing Vessels. Journal of Marine Science and Engineering. 2025; 13(6):1049. https://doi.org/10.3390/jmse13061049
Chicago/Turabian StyleYang, Kun, Jinglong Lin, Jianjun Ding, Bing Zheng, and Li Qin. 2025. "An Integrated Safety Monitoring and Pre-Warning System for Fishing Vessels" Journal of Marine Science and Engineering 13, no. 6: 1049. https://doi.org/10.3390/jmse13061049
APA StyleYang, K., Lin, J., Ding, J., Zheng, B., & Qin, L. (2025). An Integrated Safety Monitoring and Pre-Warning System for Fishing Vessels. Journal of Marine Science and Engineering, 13(6), 1049. https://doi.org/10.3390/jmse13061049