

Exploring Dissipation Terms in the SPH Momentum Equation for Wave Breaking on a Vertical Pile




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methodology: Smoothed Particle Hydrodynamics (SPH)
2.1. Fundamentals of SPH
2.1.1. SPH Governing Equations
2.1.2. Dissipation and Turbulence Modeling
2.1.3. Equation of State
2.2. Boundary Conditions
2.2.1. Modified Dynamic Boundary Conditions
2.2.2. Open Boundary Conditions
3. Case Study: Large-Scale Experiments by Irschik et al. [46]
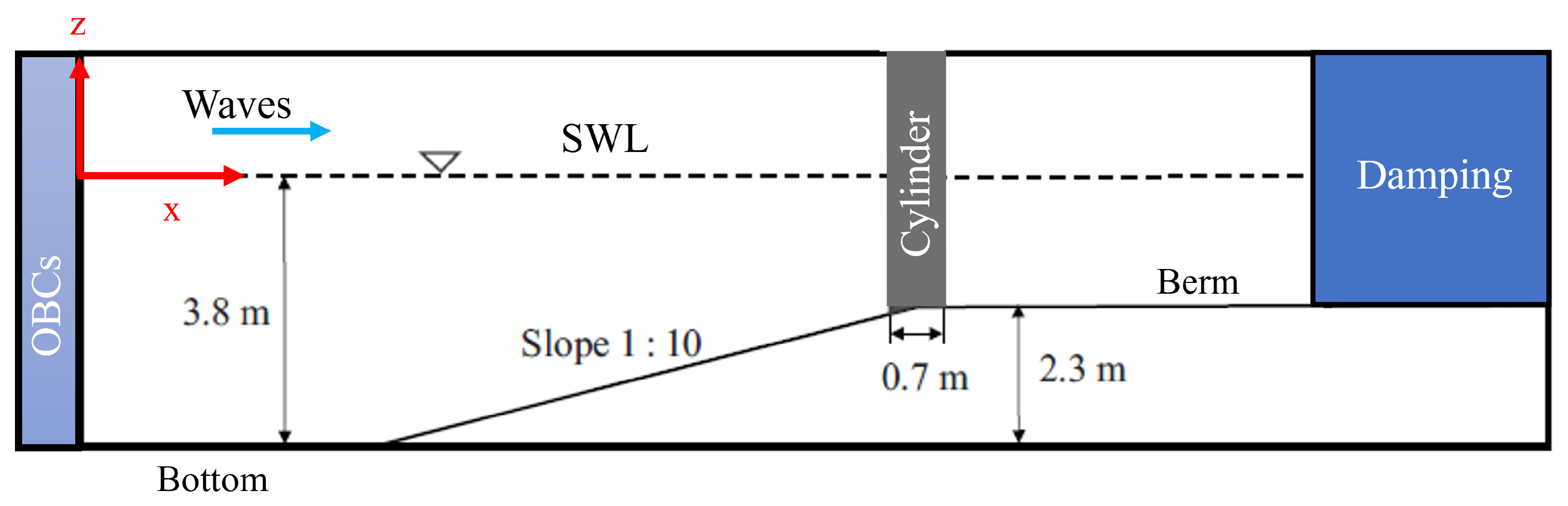
3.1. Experimental Setup and Wave Conditions
3.2. Numerical Setup
4. Model Validation Against Experimental Data
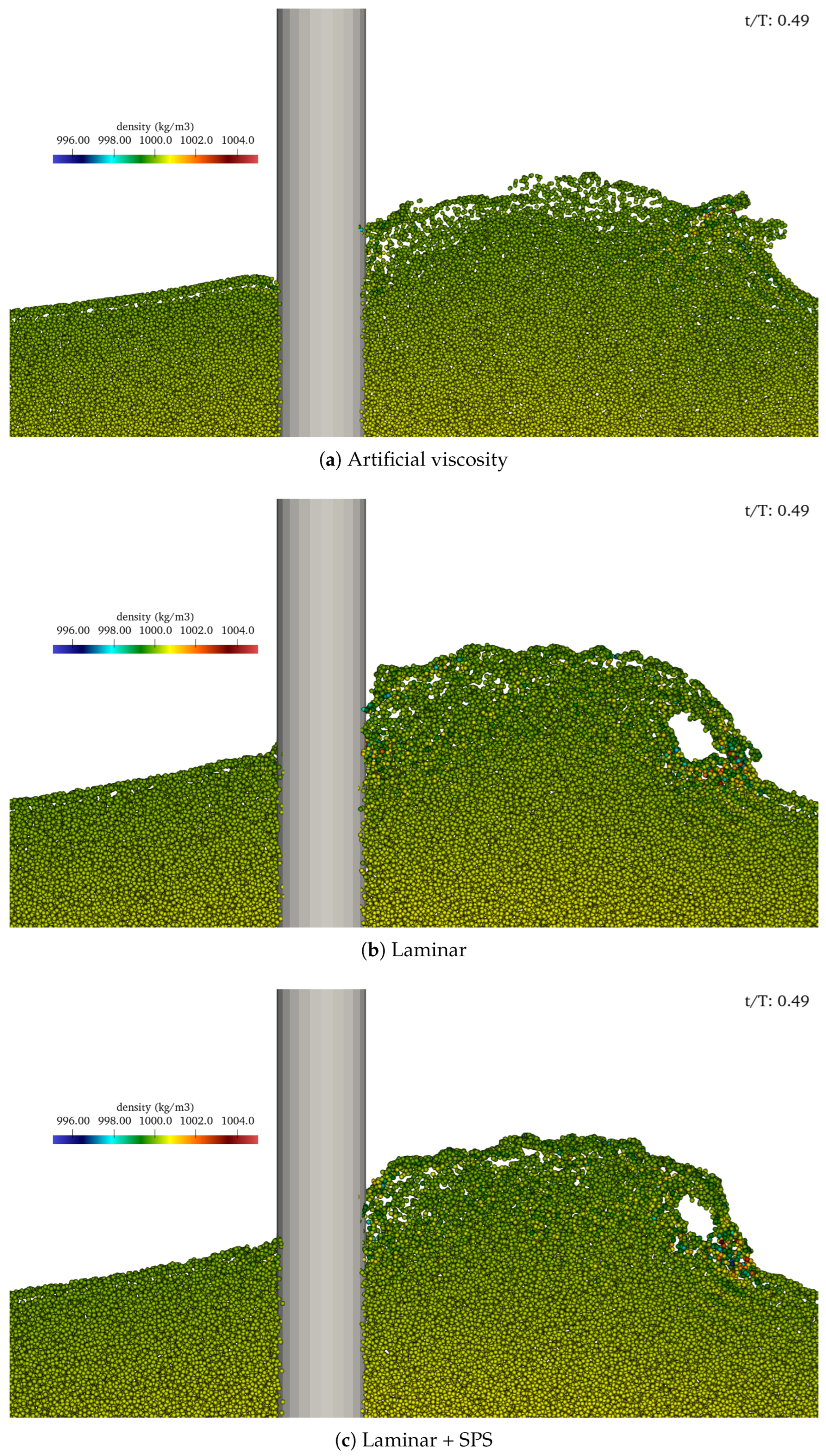
4.1. Evolution of Wave Breaking and Breaking Point
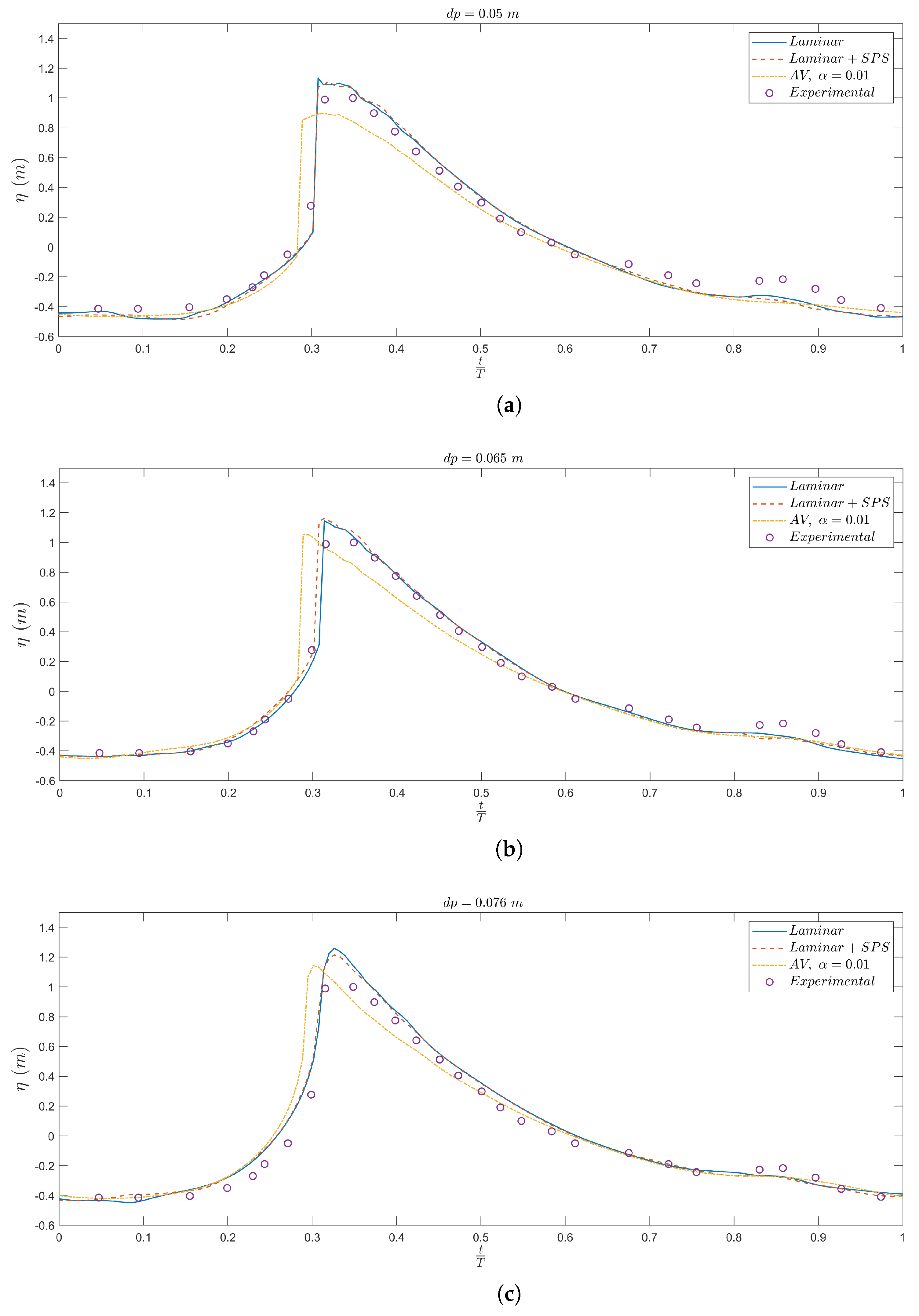
4.2. Free-Surface Elevation
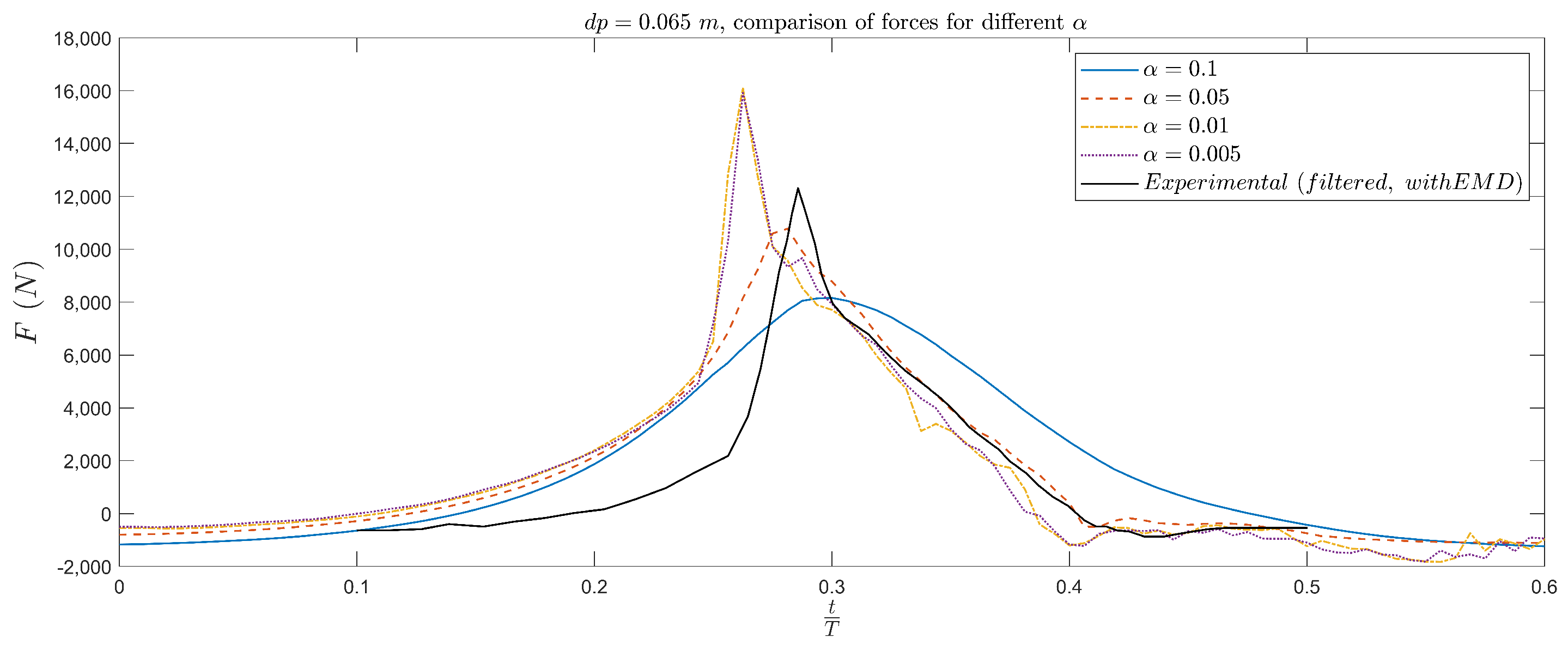
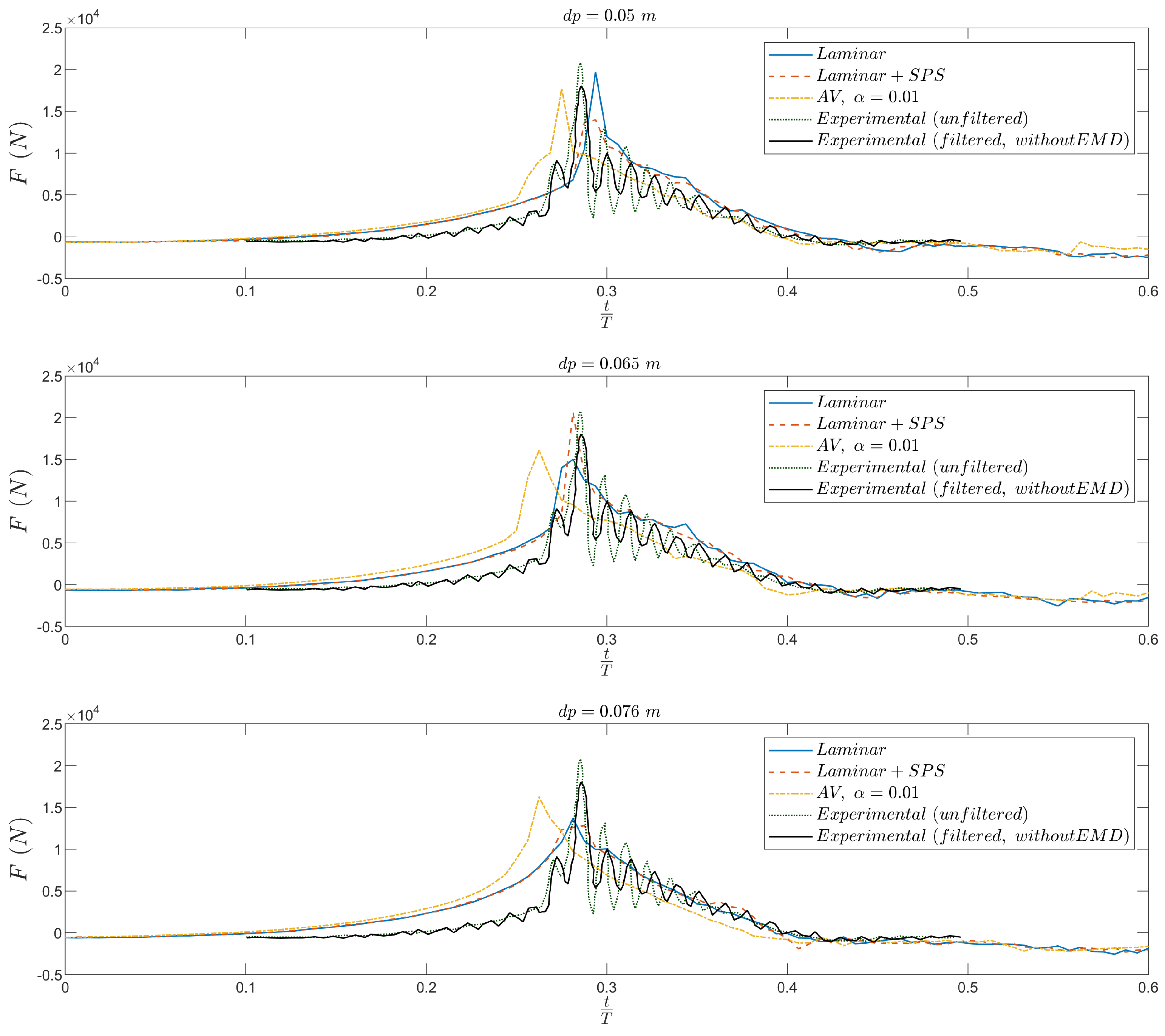
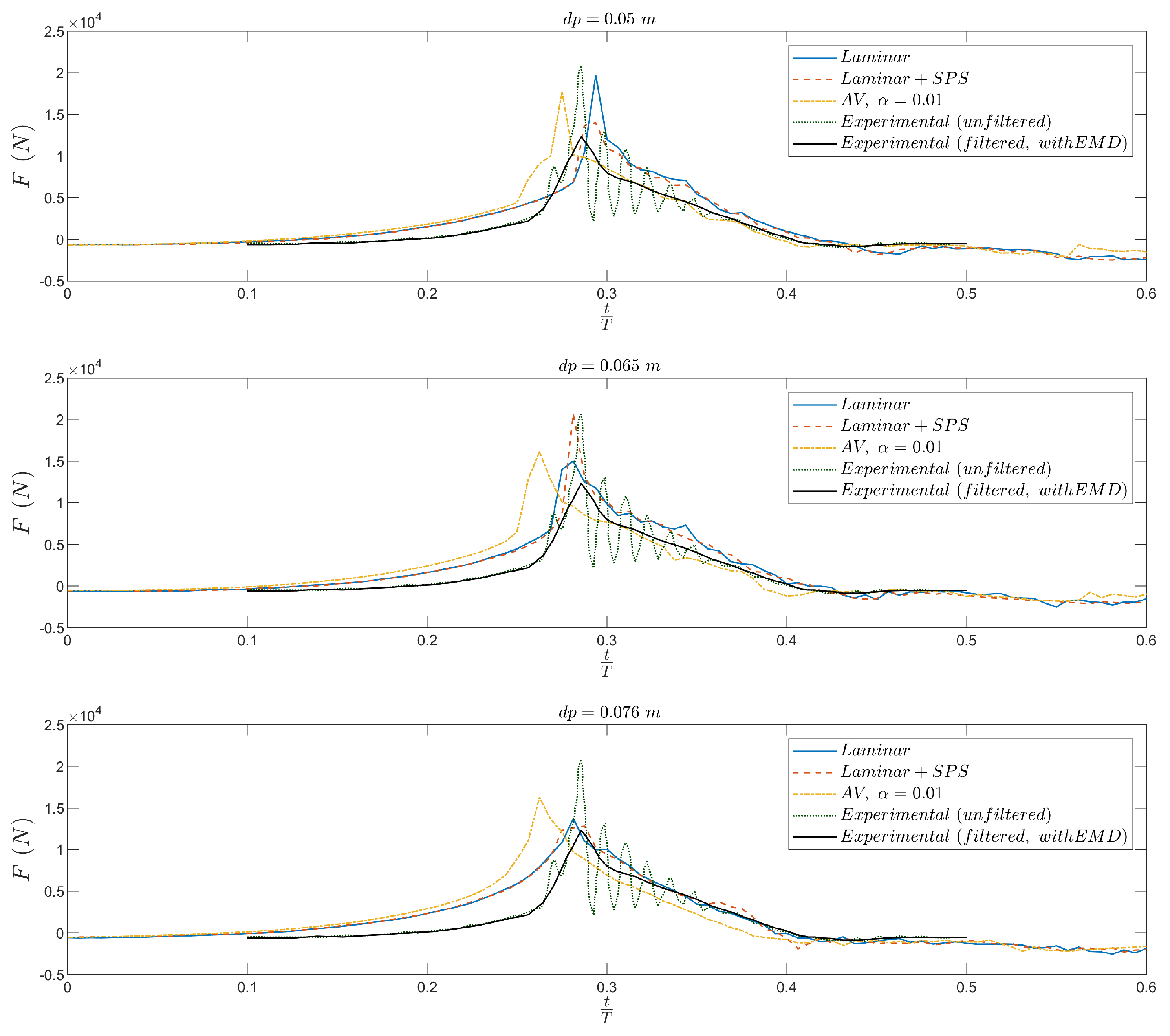
4.3. Slamming Force Prediction
Comparison of Slamming Forces with Li & Fuhrman [15]
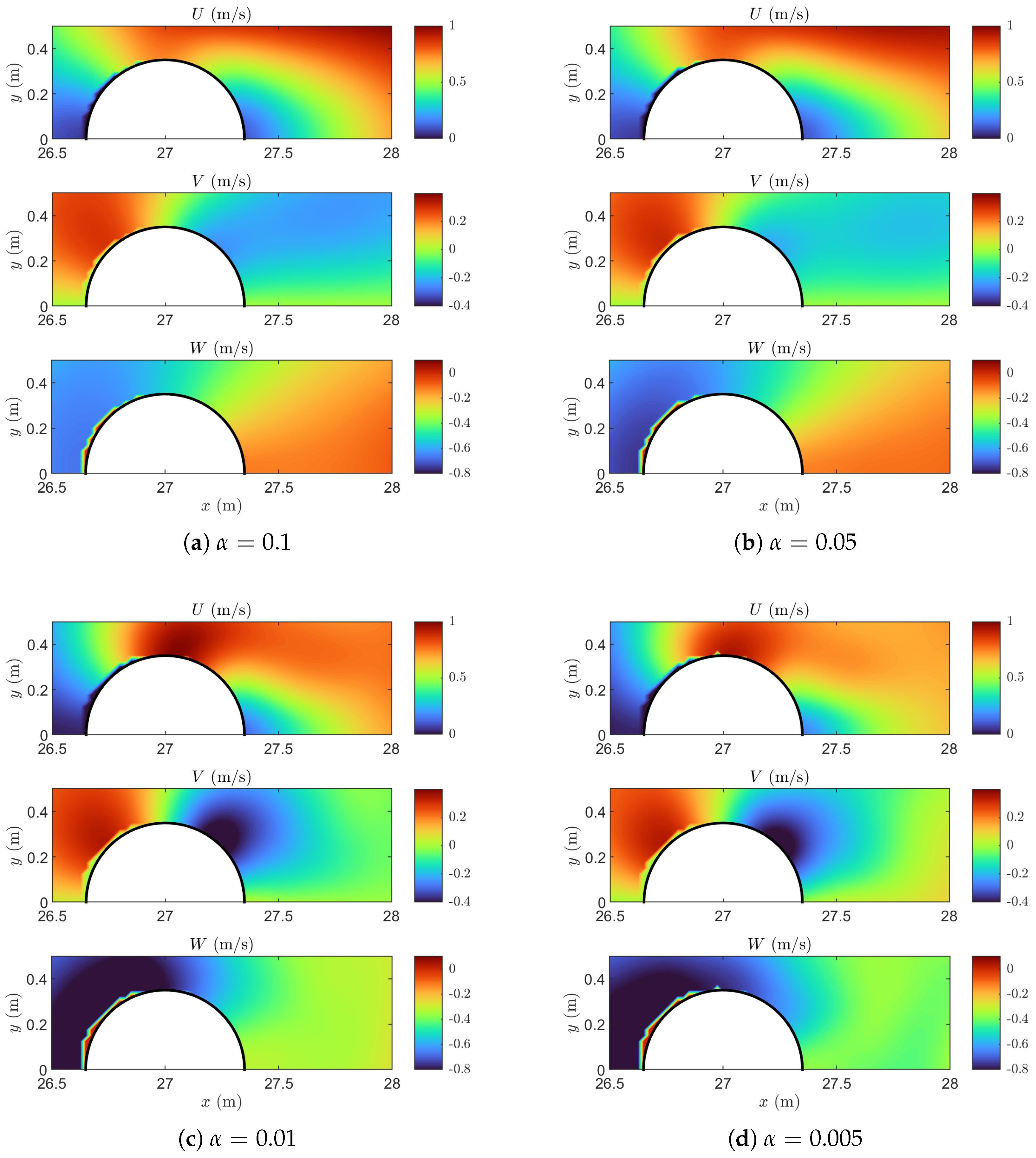
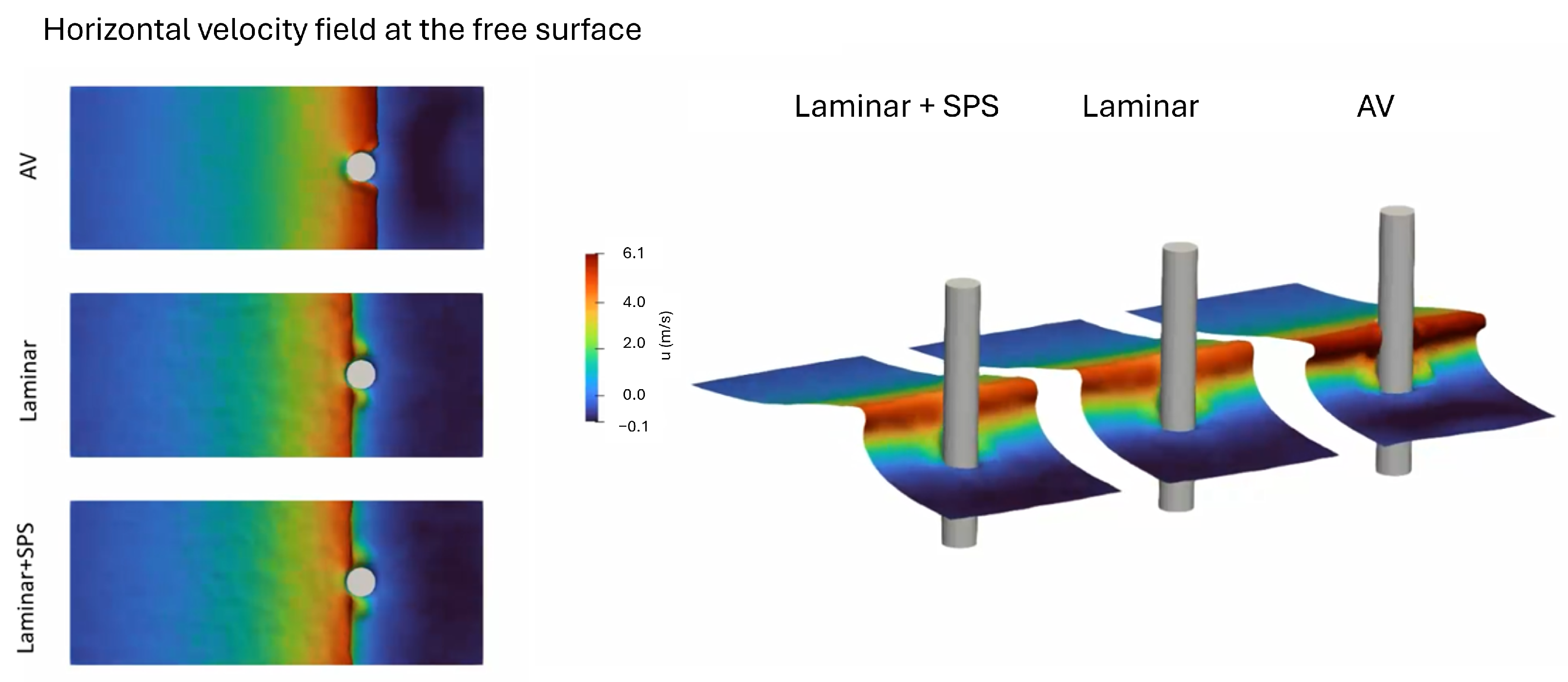
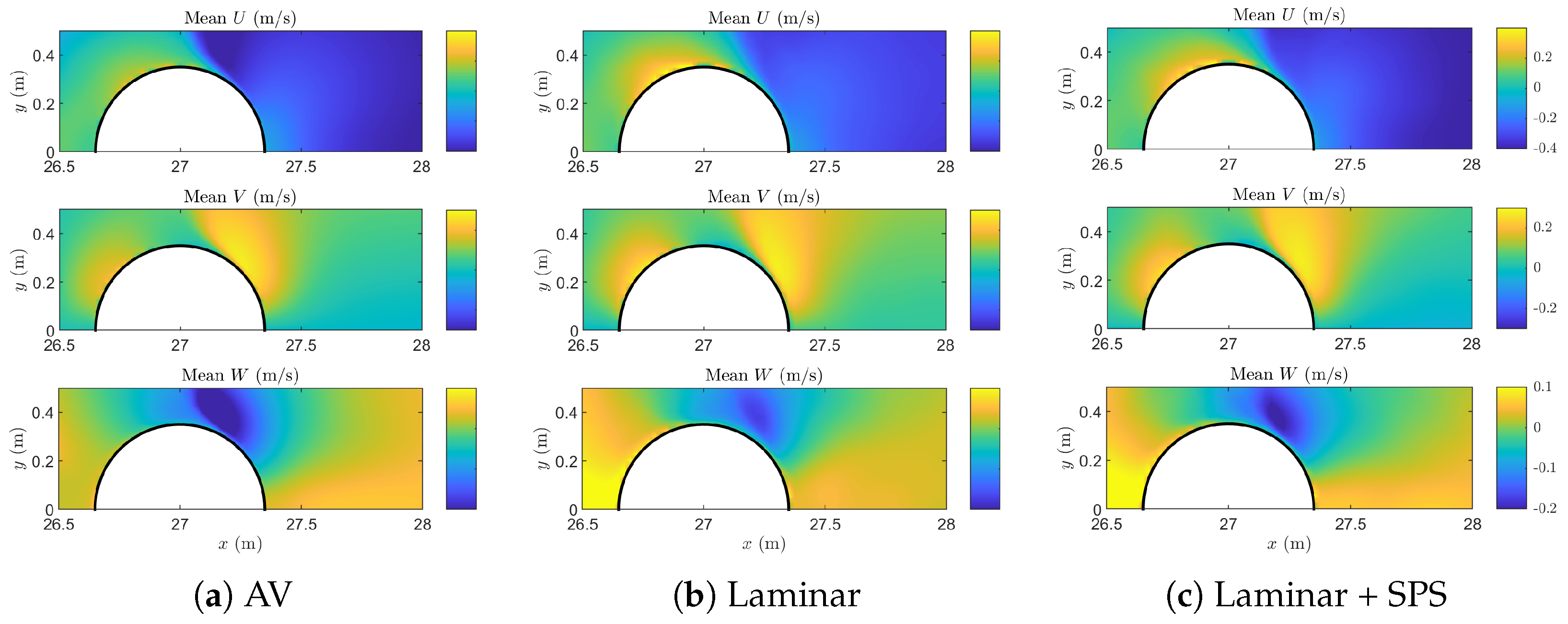
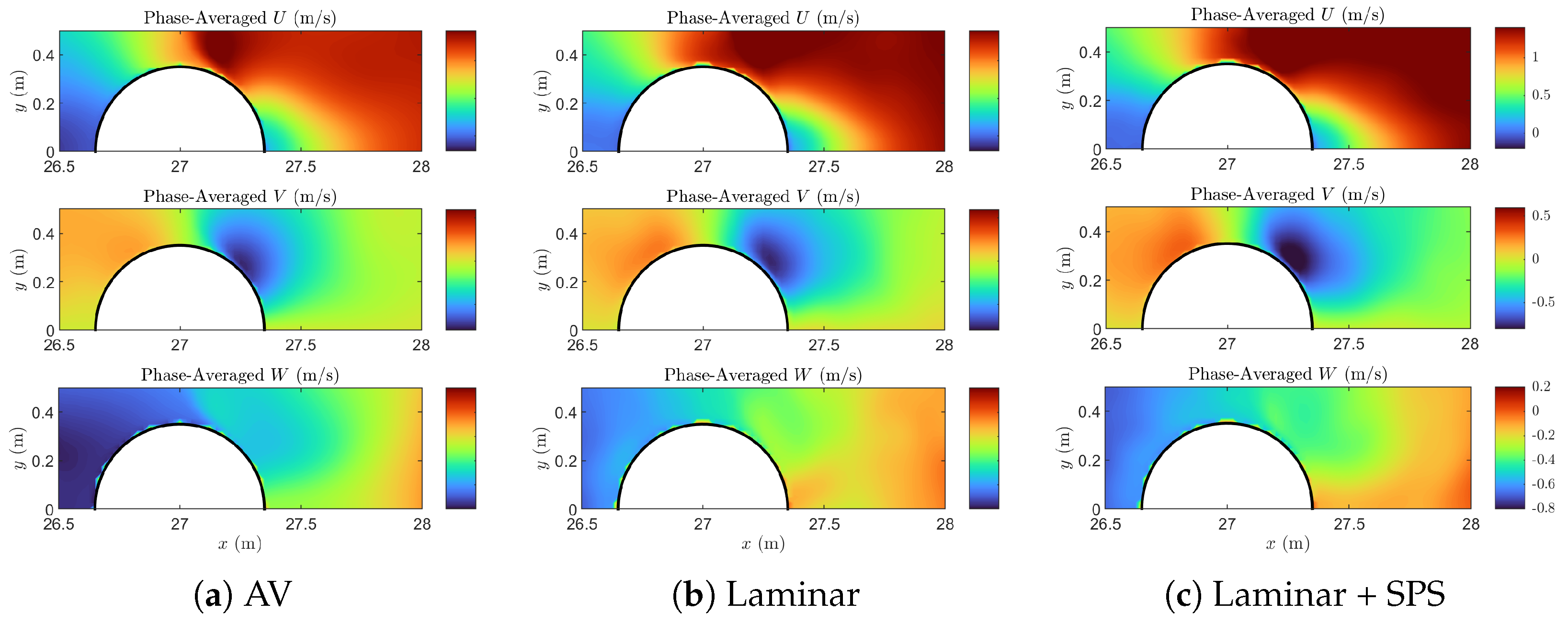
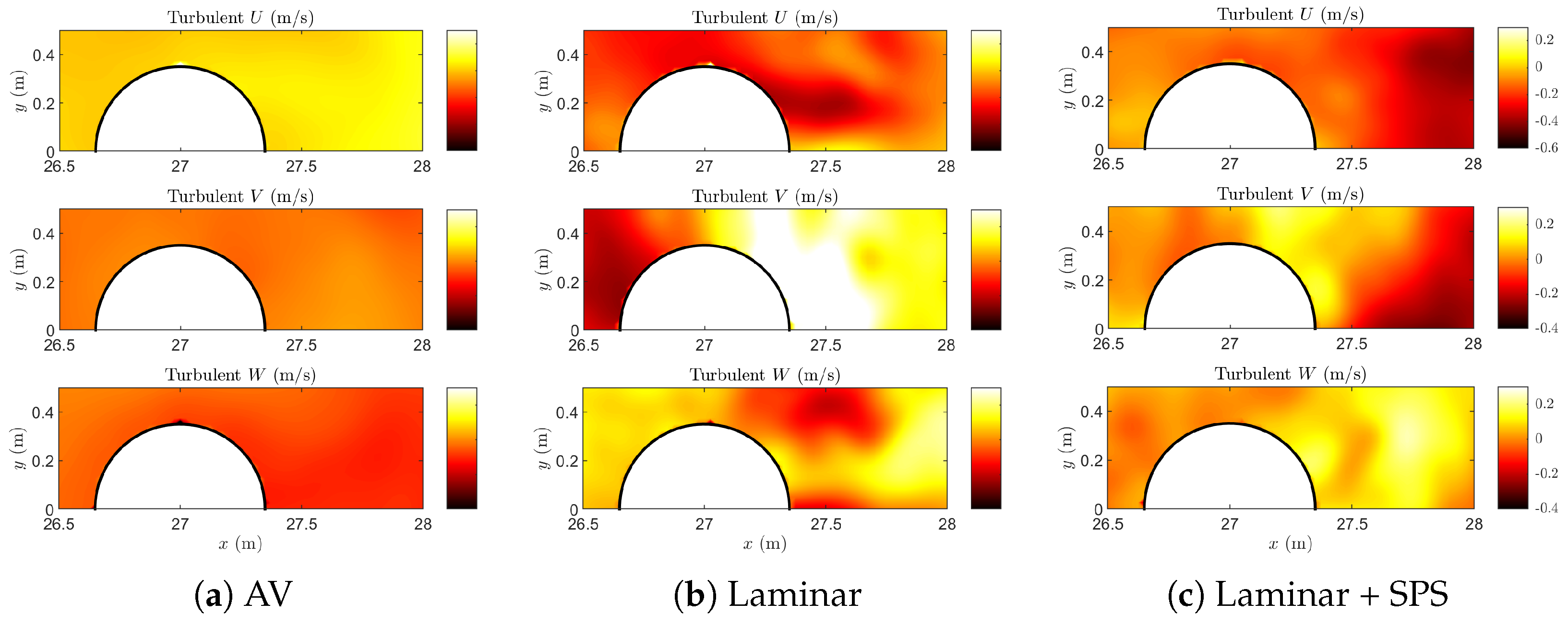
5. Velocity Field and Turbulence Characteristics
5.1. Velocity Field Decomposition
- is the time-averaged velocity over several wave periods;
- is the phase-averaged velocity, representing the coherent, repeatable component associated with the wave motion;
- is the turbulent (incoherent) fluctuation, defined as the deviation from the phase-averaged field.
5.2. Turbulent Kinetic Energy Distribution
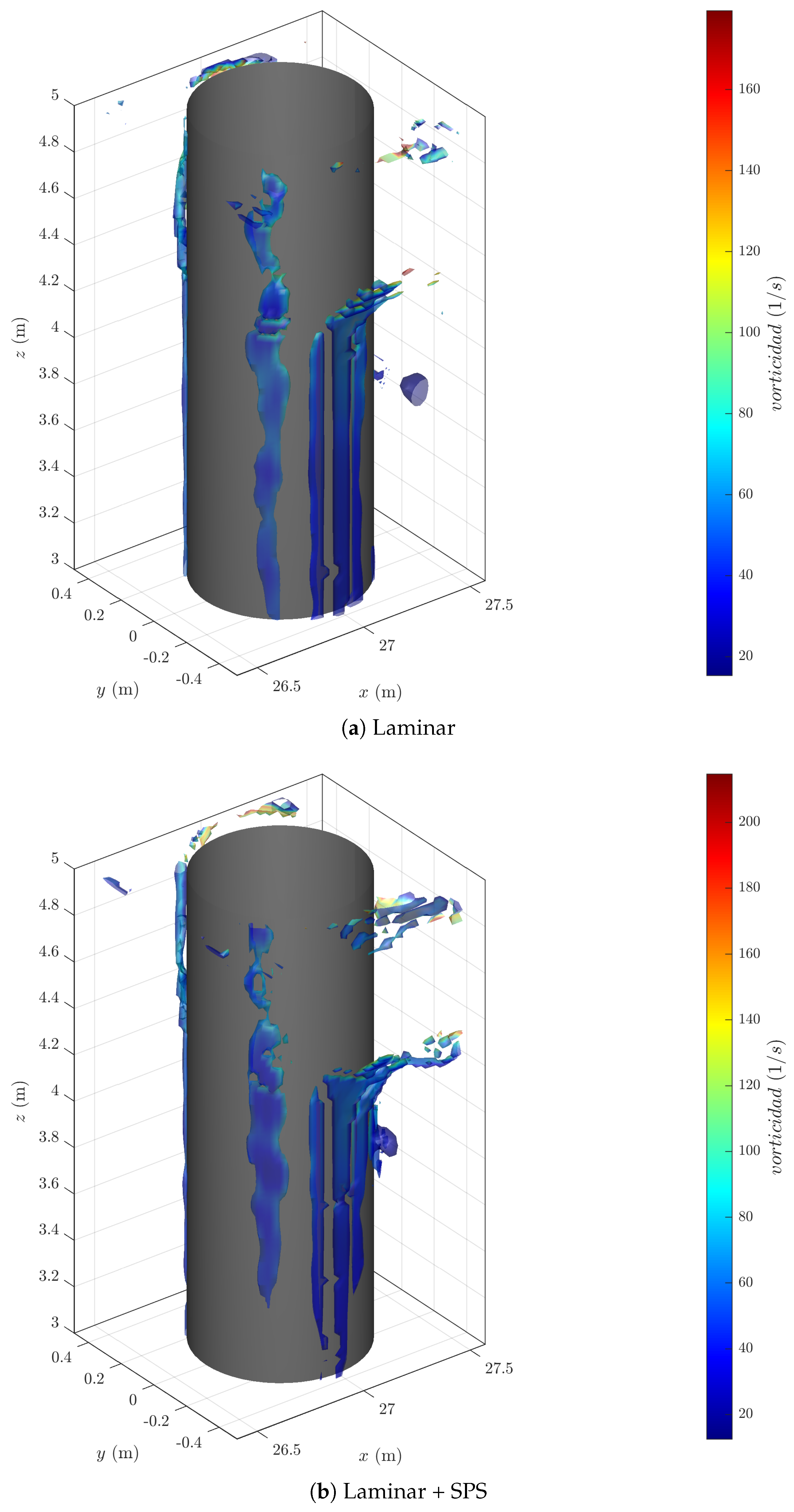
5.3. Coherent Structures
6. Discussion of Model Performance and Limitations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations and Nomenclature
Abbreviations
| AV | Artificial Viscosity |
| CFL | Courant Number |
| DBC | Dynamic Boundary Conditions |
| DNS | Direct Numerical Simulation |
| EARSM | Explicit Algebraic Reynolds Stress Models |
| EMD | Empirical Mode Decomposition |
| ISPH | Incompressible Smoothed Particle Hydrodynamics |
| LANS | Lagrangian Averaged Navier–Stokes |
| LES | Large Eddy Simulation |
| mDBC | Modified Dynamic Boundary Conditions |
| OWT | Offshore Wind Turbines |
| RANS | Reynolds-Averaged Navier–Stokes |
| SPH | Smoothed Particle Hydrodynamics |
| SPS | Sub-Particle Scale |
Nomenclature
| Symbol | Definition |
| Coefficient for artificial viscosity | |
| Gravitational acceleration vector | |
| h | Smoothing length in SPH |
| k | Turbulent kinetic energy |
| Q | Q-criterion value () |
| Particle position vector | |
| Strain-rate tensor | |
| Instantaneous velocity field | |
| Turbulent (incoherent) velocity fluctuation | |
| Phase-averaged (coherent) velocity component | |
| Time-averaged (mean) velocity | |
| Vorticity tensor (antisymmetric part of velocity gradient) | |
| Kinematic (molecular) viscosity | |
| Eddy (turbulent) viscosity | |
| Fluid density | |
| Reference fluid density | |
| t | Time (s) |
| T | Wave period (s) |
| Initial particle spacing in SPH (m) | |
| N | Number of wave cycles used for phase-averaging |
| Filter size or sub-particle length scale | |
| Spatial coordinates |
Appendix A. Influence of Artificial Viscosity

References
- Alsultani, R.; Karim, I.; Khassaf, S.; Al-Saadi, A.A. Dynamic Response Analysis of Coastal Bridge Members Exposed to Water Forces and Earthquakes. In Advances in Civil Engineering; Bahadori-Jahromi, A., Ed.; IntechOpen: Rijeka, Croatia, 2024; Chapter 3. [Google Scholar] [CrossRef]
- Han, W.; Zhou, K.; Wang, J.; Xiao, L.; Xu, X.; Xiang, Y.; Yu, X. Experimental Study of Wave Load Distributions on Pile Groups Affected by Cap Structures and Pile Spacings Under Varied Wave Conditions. J. Mar. Sci. Eng. 2024, 12, 2005. [Google Scholar] [CrossRef]
- Hong, C.; Lyu, Z.; Wang, F.; Zhao, Z.; Wang, L. Wave-Current Loads on a Super-Large-Diameter Pile in Deep Water: An Experimental Study. Appl. Sci. 2023, 13, 8859. [Google Scholar] [CrossRef]
- Li, M.; Leng, S.; Wang, Y.; Xue, S.; Wang, J.; Xu, G.; Mitoulis, S.A. Hydrodynamic analysis of bridge piers subjected to extreme waves. Proc. Inst. Civ. Eng. Bridge Eng. 2024. [Google Scholar] [CrossRef]
- Chaplin, J.R.; Rainey, R.C.T.; Yemm, R.W. Ringing of a vertical cylinder in waves. J. Fluid Mech. 1997, 350, 119–147. [Google Scholar] [CrossRef]
- Wienke, J.; Oumeraci, H. Breaking wave impact force on a vertical and inclined slender pile—theoretical and large-scale model investigations. Coast. Eng. 2005, 52, 435–462. [Google Scholar] [CrossRef]
- Jiang, X.; Yin, Z.; Wang, Y.; Zhang, R. Group interaction effect on breaking wave forces on a vertical pile: Experimental tests and predictive models. Coast. Eng. 2025, 195, 104651. [Google Scholar] [CrossRef]
- Petrini, F.; Manenti, S.; Gkoumas, K.; Bontempi, F. Structural Design and Analysis of Offshore Wind Turbines from a System Point of View. Wind Eng. 2010, 34, 85–107. [Google Scholar] [CrossRef]
- World Meteorological Organization. Extreme weather and climate events. In State of the Global Climate 2023; United Nations: New York, NY, USA, 2024; pp. 23–25. [Google Scholar]
- Altomare, C.; Gironella, X.; Marzeddu, A.; Viñes Recasens, M.; Mösso, C.; Sospedra, J. Impact of focused wave groups on pier structures: A case study of severe breaking waves at Pont del Petroli during storm Gloria. Front. Built Environ. 2024, 10, 1372906. [Google Scholar] [CrossRef]
- Chow, A.D.; Rogers, B.D.; Lind, S.J.; Stansby, P.K. Numerical wave basin using incompressible smoothed particle hydrodynamics (ISPH) on a single GPU with vertical cylinder test cases. Comput. Fluids 2019, 179, 543–562. [Google Scholar] [CrossRef]
- Fan, Y.; Li, J.; Liu, S.; Zhang, H. Experimental and numerical analysis of wave forces on a vertical truncated cylinder with different depths of submergence under focused waves. Ocean Eng. 2024, 309, 118523. [Google Scholar] [CrossRef]
- Zhang, Z.; Tu, J.; He, Y.; Han, Z.; Yang, H.; Zhou, D.; Fu, S. The influence of regular wave and irregular wave on the mechanical characteristics of a triple-cylinder bundle structure. Ocean Eng. 2021, 220, 108379. [Google Scholar] [CrossRef]
- Yang, Y.; English, A.; Rogers, B.D.; Stansby, P.K.; Stagonas, D.; Buldakov, E.; Draycott, S. Numerical modelling of a vertical cylinder with dynamic response in steep and breaking waves using smoothed particle hydrodynamics. J. Fluids Struct. 2024, 125, 104049. [Google Scholar] [CrossRef]
- Li, Y.; Fuhrman, D.R. On the turbulence modelling of waves breaking on a vertical pile. J. Fluid Mech. 2022, 953, A3. [Google Scholar] [CrossRef]
- Qu, S.; Liu, S.; Ong, M.C. An evaluation of different RANS turbulence models for simulating breaking waves past a vertical cylinder. Ocean Eng. 2021, 234, 109195. [Google Scholar] [CrossRef]
- Monaghan, J.J. Smoothed Particle Hydrodynamics. Annu. Rev. Astron. Astrophys. 1992, 30, 543–574. [Google Scholar] [CrossRef]
- Meneveau, C.; Katz, J. Scale-Invariance and Turbulence Models for Large-Eddy Simulation. Annu. Rev. Fluid Mech. 2000, 32, 1–32. Available online: https://www.annualreviews.org/content/journals/10.1146/annurev.fluid.32.1.1 (accessed on 15 May 2025). [CrossRef]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 1998; Volume 2. [Google Scholar]
- Monaghan, J. Simulating Free Surface Flows with SPH. J. Comput. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]
- Gomez-Gesteira, M.; Benedict, D.; Rogers, R.A.D.; Crespo, A.J. State-of-the-art of classical SPH for free-surface flows. J. Hydraul. Res. 2010, 48, 6–27. [Google Scholar] [CrossRef]
- Violeau, D.; Rogers, B.D. Smoothed particle hydrodynamics (SPH) for free-surface flows: Past, present and future. J. Hydraul. Res. 2016, 54, 1–26. [Google Scholar] [CrossRef]
- Salis, N.; Luo, M.; Reali, A.; Manenti, S. Wave generation and wave–structure impact modelling with WCSPH. Ocean Eng. 2022, 266, 113228. [Google Scholar] [CrossRef]
- Wen, H.; Ren, B.; Dong, P.; Wang, Y. A SPH numerical wave basin for modeling wave-structure interactions. Appl. Ocean Res. 2016, 59, 366–377. [Google Scholar] [CrossRef]
- Tasora, A.; Negrut, D.; Anitescu, M. Large-scale parallel multi-body dynamics with frictional contact on the graphical processing unit. Proc. Inst. Mech. Eng. Part K 2008, 222, 315–326. [Google Scholar] [CrossRef]
- Tasora, A.; Anitescu, M. A matrix-free cone complementarity approach for solving large-scale, nonsmooth, rigid body dynamics. Comput. Methods Appl. Mech. Eng. 2011, 200, 439–453. [Google Scholar] [CrossRef]
- Morris, J.P.; Monaghan, J.J. A Switch to Reduce SPH Viscosity. J. Comput. Phys. 1997, 50, 41–50. [Google Scholar] [CrossRef]
- Holm, D.D. Fluctuation effects on 3D Lagrangian mean and Eulerian mean fluid motion. Phys. D Nonlinear Phenom. 1999, 133, 215–269. [Google Scholar] [CrossRef]
- Monaghan, J.J. SPH compressible turbulence. Mon. Not. R. Astron. Soc. 2002, 335, 843–852. [Google Scholar] [CrossRef]
- Monaghan, J.J. A turbulence model for smoothed particle hydrodynamics. Eur. J. Mech.-B/Fluids 2011, 30, 360–370. [Google Scholar] [CrossRef]
- Valizadeh, A.; Monaghan, J.J. SPH simulation of 2D turbulence driven by a cylindrical stirrer. Eur. J. Mech.-B/Fluids 2015, 51, 44–53. [Google Scholar] [CrossRef]
- Monaghan, J.J. SPH-ε simulation of 2D turbulence driven by a moving cylinder. Eur. J. Mech.-B/Fluids 2017, 65, 486–493. [Google Scholar] [CrossRef]
- Violeau, D.; Piccon, S.; Chabard, J.P. Two attempts of turbulence modelling in smoothed particle hydrodynamics. In Advances in Fluid Modeling and Turbulence Measurements; World Scientific: Singapore, 2002; pp. 339–346. [Google Scholar]
- Violeau, D.; Issa, R. Numerical modelling of complex turbulent free-surface flows with the SPH method: An overview. Int. J. Numer. Methods Fluids 2007, 53, 277–304. [Google Scholar] [CrossRef]
- Ferrand, M.; Laurence, D.; Rogers, B.D.; Violeau, D.; Kassiotis, C. Unified semi-analytical wall boundary conditions for inviscid, laminar or turbulent flows in the meshless SPH method. Int. J. Numer. Methods Fluids 2013, 71, 446–472. [Google Scholar] [CrossRef]
- Leroy, A.; Violeau, D.; Ferrand, M.; Kassiotis, C. Unified semi-analytical wall boundary conditions applied to 2-D incompressible SPH. J. Comput. Phys. 2014, 261, 106–129. [Google Scholar] [CrossRef]
- Lo, E.; Shao, S. Simulation of near-shore solitary wave mechanics by an incompressible SPH method. Appl. Ocean. Res. 2002, 24, 275–286. [Google Scholar] [CrossRef]
- Dalrymple, R.; Rogers, B. Numerical modeling of water waves with the SPH method. Coast. Eng. 2006, 53, 141–147. [Google Scholar] [CrossRef]
- Mayrhofer, A.; Laurence, D.; Rogers, B.D.; Violeau, D. DNS and LES of 3-D wall-bounded turbulence using Smoothed Particle Hydrodynamics. Comput. Fluids 2015, 115, 86–97. [Google Scholar] [CrossRef]
- Gotoh, T.; Fukayama, D. Pressure spectrum in homogeneous turbulence. Phys. Rev. Lett. 2001, 86, 3775. [Google Scholar] [CrossRef] [PubMed]
- Antuono, M.; Marrone, S.; Di Mascio, A.; Colagrossi, A. Smoothed particle hydrodynamics method from a large eddy simulation perspective. Generalization to a quasi-Lagrangian model. Phys. Fluids 2021, 33, 015102. [Google Scholar] [CrossRef]
- Subramaniam, S.P.; Scheres, B.; Schilling, M.; Liebisch, S.; Kerpen, N.B.; Schlurmann, T.; Altomare, C.; Schüttrumpf, H. Influence of Convex and Concave Curvatures in a Coastal Dike Line on Wave Run-up. Water 2019, 11, 1333. [Google Scholar] [CrossRef]
- Pereira, L.S.; Amaro, R.A., Jr.; Cheng, L.Y.; de Sousa, F.S.; Karuka, G.M. A numerical modeling of wave-inclined slats interaction for particle methods. Ocean Eng. 2024, 296, 116699. [Google Scholar] [CrossRef]
- Landesman, P.; Harris, J.C.; Peyrard, C.; Benoit, M. Wave–structure interaction by a two–way coupling between a fully nonlinear potential flow model and a Navier–Stokes solver. Ocean Eng. 2024, 308, 118209. [Google Scholar] [CrossRef]
- Shadloo, M.; Oger, G.; Le Touzé, D. Smoothed particle hydrodynamics method for fluid flows, towards industrial applications: Motivations, current state, and challenges. Comput. Fluids 2016, 136, 11–34. [Google Scholar] [CrossRef]
- Irschik, K.; Sparboom, U.; Oumeraci, H. Breaking wave loads on a slender pile in shallo water. In Coastal Engineering 2004; World Scientific: Singapore, 2004; pp. 568–580. [Google Scholar] [CrossRef]
- Domínguez, J.; Fourtakas, G.; Altomare, C.; Canelas, R.; Tafuni, A.; García-Feal, O.; Martínez-Estévez, I.; Mokos, A.; Vacondio, R.; Crespo, A.; et al. DualSPHysics: From fluid dynamics to multiphysics problems. Comput. Part. Mech. 2022, 9, 867–895. [Google Scholar] [CrossRef]
- Violeau, D. Fluid Mechanics and the SPH Method: Theory and Applications; Oxford University Press: Oxford, UK, 2012; pp. 1–616. [Google Scholar] [CrossRef]
- Smagorinsky, J. General Circulation Experiments with the Primitive Equations: I. The Basic Experiment. Mon. Weather Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Wendland, H. Piecewise polynomial, positive definite and compactly supported radial functions of minimal degree. Adv. Comput. Math. 1995, 4, 389–396. [Google Scholar] [CrossRef]
- Fourtakas, G.; Dominguez, J.M.; Vacondio, R.; Rogers, B.D. Local uniform stencil (LUST) boundary condition for arbitrary 3-D boundaries in parallel smoothed particle hydrodynamics (SPH) models. Comput. Fluids 2019, 190, 346–361. [Google Scholar] [CrossRef]
- Altomare, C.; Crespo, A.J.; Domínguez, J.M.; Gómez-Gesteira, M.; Suzuki, T.; Verwaest, T. Applicability of Smoothed Particle Hydrodynamics for estimation of sea wave impact on coastal structures. Coast. Eng. 2015, 96, 1–12. [Google Scholar] [CrossRef]
- Altomare, C.; Gironella, X.; Crespo, A.J. Simulation of random wave overtopping by a WCSPH model. Appl. Ocean Res. 2021, 116, 102888. [Google Scholar] [CrossRef]
- Crespo, A.; Domínguez, J.; Rogers, B.; Gómez-Gesteira, M.; Longshaw, S.; Canelas, R.; Vacondio, R.; Barreiro, A.; García-Feal, O. DualSPHysics: Open-source parallel CFD solver based on Smoothed Particle Hydrodynamics (SPH). Comput. Phys. Commun. 2015, 187, 204–216. [Google Scholar] [CrossRef]
- English, A.; Domínguez, J.M.; Vacondio, R.; Crespo, A.J.C.; Stansby, P.K.; Lind, S.J.; Chiapponi, L.; Gómez-Gesteira, M. Modified dynamic boundary conditions (mDBC) for general-purpose smoothed particle hydrodynamics (SPH): Application to tank sloshing, dam break and fish pass problems. Comput. Part. Mech. 2021, 9, 1–15. [Google Scholar] [CrossRef]
- Tafuni, A.; Domínguez, J.M.; Vacondio, R.; Crespo, A.J.C. A versatile algorithm for the treatment of open boundary conditions in Smoothed particle hydrodynamics GPU models. Comput. Methods Appl. Mech. Eng. 2018, 342, 604–624. [Google Scholar] [CrossRef]
- Verbrugghe, T.; Domínguez, J.M.; Crespo, A.J.; Altomare, C.; Stratigaki, V.; Troch, P.; Kortenhaus, A. Coupling methodology for smoothed particle hydrodynamics modelling of non-linear wave-structure interactions. Coast. Eng. 2018, 138, 184–198. [Google Scholar] [CrossRef]
- Verbrugghe, T.; Stratigaki, V.; Altomare, C.; Domínguez, J.; Troch, P.; Kortenhaus, A. Implementation of open boundaries within a two-way coupled SPH model to simulate nonlinear wave–structure interactions. Energies 2019, 12, 697. [Google Scholar] [CrossRef]
- Ruffini, G.; Briganti, R.; Girolamo, P.D.; Stolle, J.; Ghiassi, B.; Castellino, M. Numerical Modelling of Flow-Debris Interaction during Extreme Hydrodynamic Events with DualSPHysics-CHRONO. Appl. Sci. 2021, 11, 3618. [Google Scholar] [CrossRef]
- Fenton, J.D. Nonlinear wave theories. Sea 1990, 9, 3–25. [Google Scholar]
- Domínguez, J.M.; Altomare, C.; Gonzalez-Cao, J.; Lomonaco, P. Towards a more complete tool for coastal engineering: Solitary 951 wave generation, propagation and breaking in an SPH-based model. Coast. Eng. J. 2019, 61, 15–40. [Google Scholar] [CrossRef]
- Barreiro, A.; Domínguez, J.M.; Crespo, A.J.C.; González-Jorge, H.; Roca, D.; Gómez-Gesteira, M. Integration of UAV photogrammetry and SPH modelling of fluids to study runoff on real terrains. PLoS ONE 2014, 9, e111031. [Google Scholar] [CrossRef]
- Suzuki, T.; García-Feal, O.; Domínguez, J.M.; Altomare, C. Simulation of 3D overtopping flow–object–structure interaction with a calibration-based wave generation method with DualSPHysics and SWASH. Comput. Part. Mech. 2022, 9, 1003–1015. [Google Scholar] [CrossRef]
- Lind, S.; Xu, R.; Stansby, P.; Rogers, B. Incompressible smoothed particle hydrodynamics for free-surface flows: A generalised diffusion-based algorithm for stability and validations for impulsive flows and propagating waves. J. Comput. Phys. 2012, 231, 1499–1523. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Kos, A. Solitary Waves on a Cretan Beach. J. Waterw. Port Coastal Ocean Eng. 1999, 125, 145–155. [Google Scholar] [CrossRef]
- Choi, S.J.; Lee, K.H.; Gudmestad, O.T. The effect of dynamic amplification due to a structure’s vibration on breaking wave impact. Ocean Eng. 2015, 96, 8–20. [Google Scholar] [CrossRef]
- Meringolo, D.D.; Marrone, S.; Colagrossi, A.; Liu, Y. A dynamic δ-SPH model: How to get rid of diffusive parameter tuning. Comput. Fluids 2019, 179, 334–355. [Google Scholar] [CrossRef]
- Lowe, R.; Altomare, C.; Buckley, M.; da Silva, R.; Hansen, J.; Rijnsdorp, D.; Domínguez, J.; Crespo, A. Smoothed Particle Hydrodynamics simulations of reef surf zone processes driven by plunging irregular waves. Ocean Model. 2022, 171, 101945. [Google Scholar] [CrossRef]
- Altomare, C.; Scandura, P.; Cáceres, I.; van der A, D.A.; Viccione, G. Large-scale wave breaking over a barred beach: SPH numerical simulation and comparison with experiments. Coast. Eng. 2023, 185, 104362. [Google Scholar] [CrossRef]
- Ricci, F.; Vacondio, R.; Domínguez, J.M.; Tafuni, A. Three-dimensional variable resolution for multi-scale modeling in Smoothed Particle Hydrodynamics. Comput. Phys. Commun. 2025, 313, 109609. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Altomare, C.; Li, Y.P.; Tafuni, A. Exploring Dissipation Terms in the SPH Momentum Equation for Wave Breaking on a Vertical Pile. J. Mar. Sci. Eng. 2025, 13, 1005. https://doi.org/10.3390/jmse13061005
Altomare C, Li YP, Tafuni A. Exploring Dissipation Terms in the SPH Momentum Equation for Wave Breaking on a Vertical Pile. Journal of Marine Science and Engineering. 2025; 13(6):1005. https://doi.org/10.3390/jmse13061005
Chicago/Turabian StyleAltomare, Corrado, Yuzhu Pearl Li, and Angelantonio Tafuni. 2025. "Exploring Dissipation Terms in the SPH Momentum Equation for Wave Breaking on a Vertical Pile" Journal of Marine Science and Engineering 13, no. 6: 1005. https://doi.org/10.3390/jmse13061005
APA StyleAltomare, C., Li, Y. P., & Tafuni, A. (2025). Exploring Dissipation Terms in the SPH Momentum Equation for Wave Breaking on a Vertical Pile. Journal of Marine Science and Engineering, 13(6), 1005. https://doi.org/10.3390/jmse13061005